
Laboratory Study of Integrated Wet-Towing of a Triple-Bucket Jacket Foundation for Far-Offshore Applications

Abstract
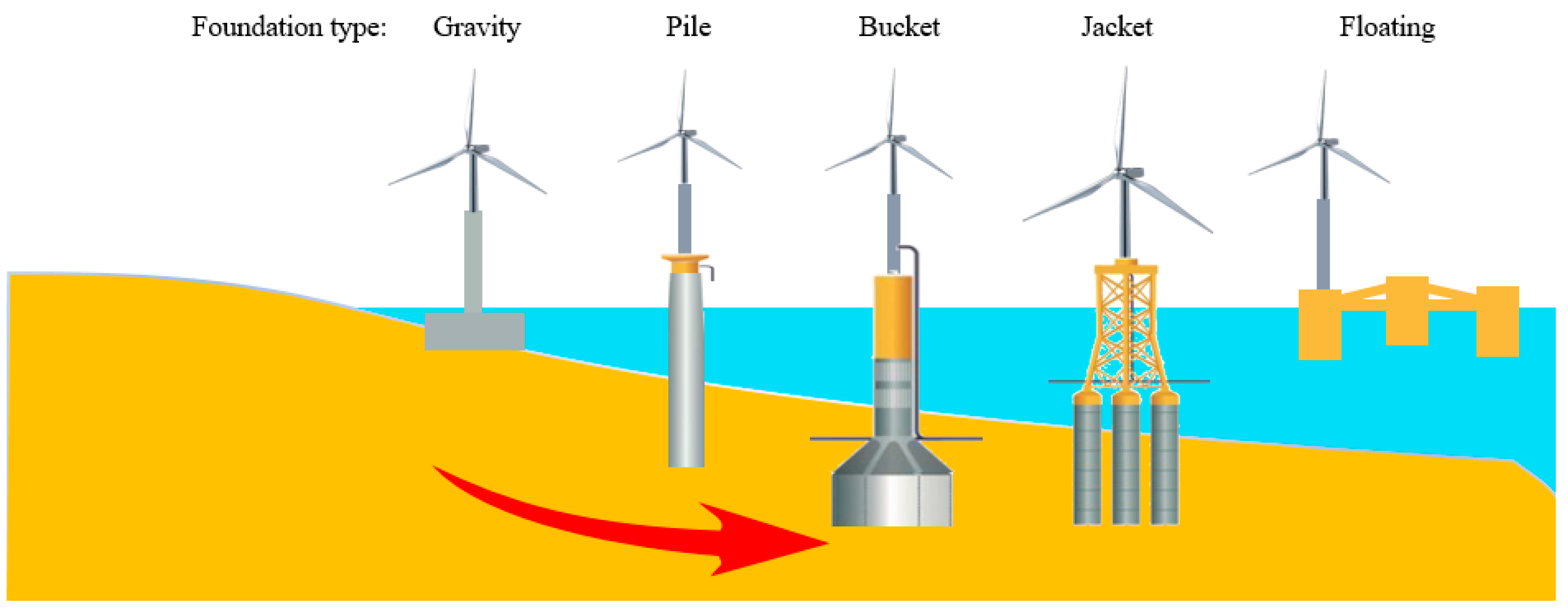
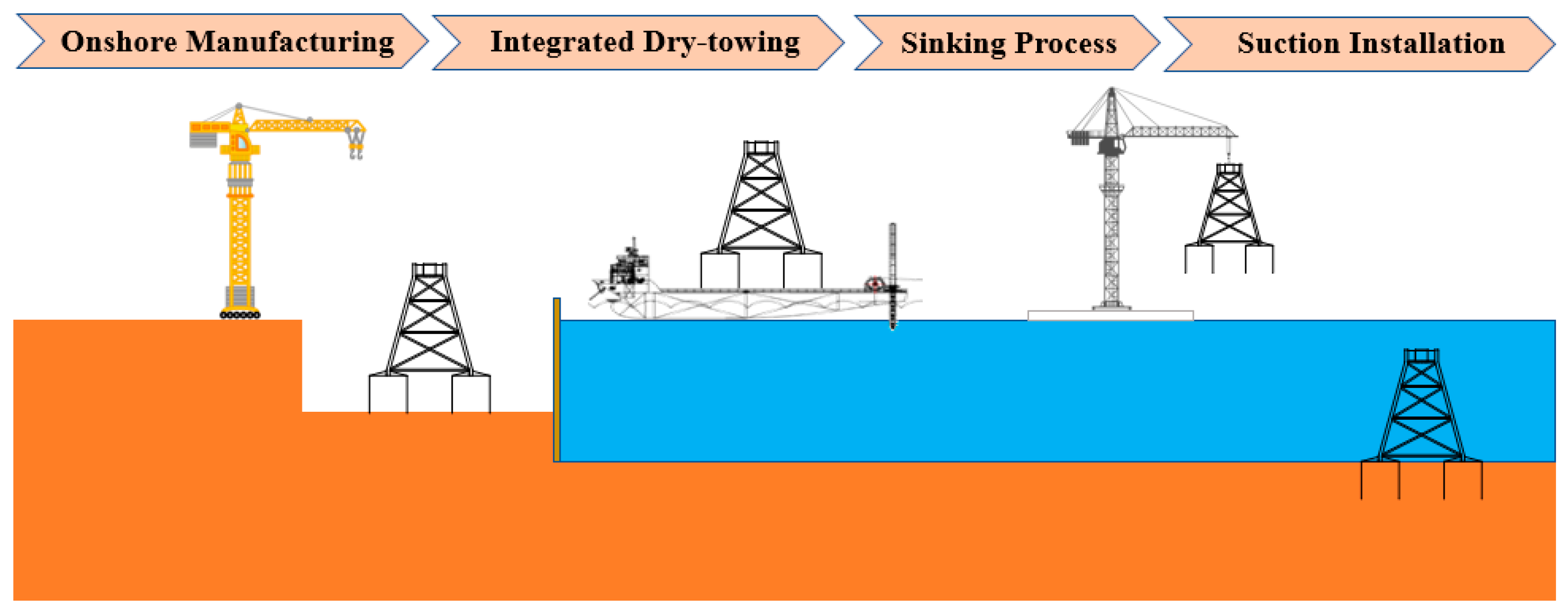
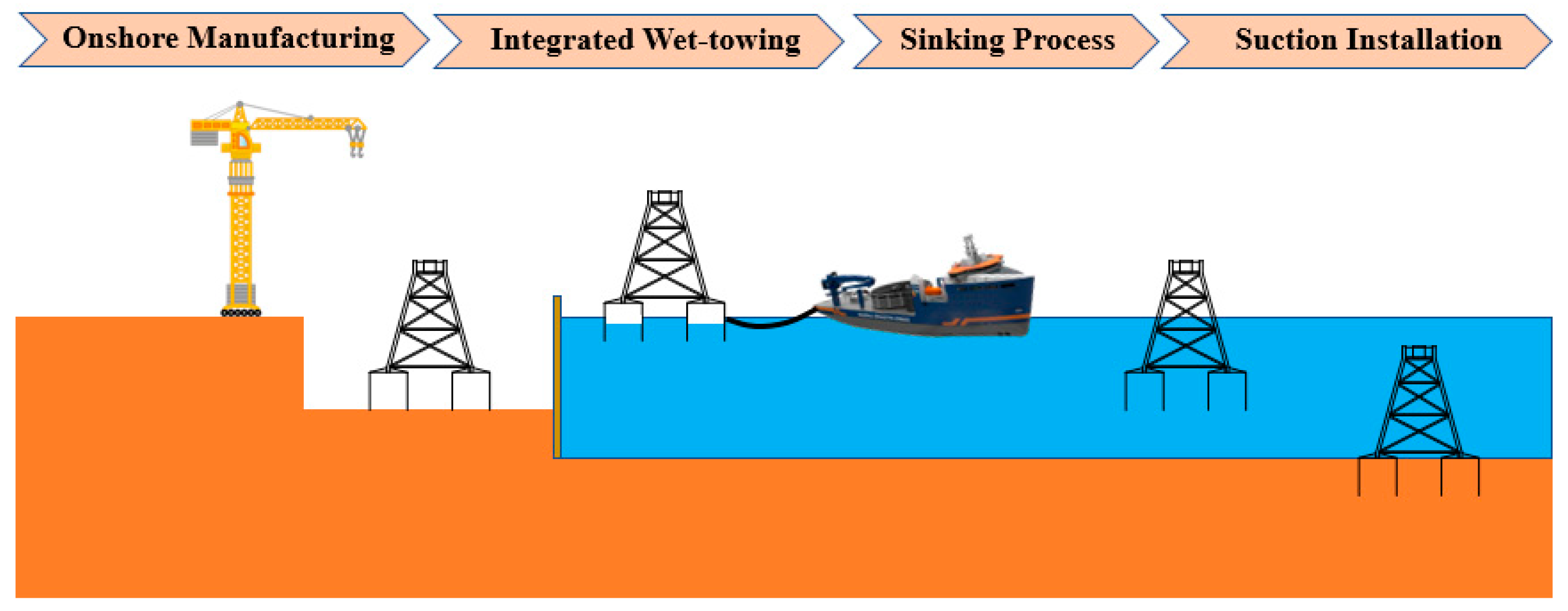
:1. Introduction
2. Model Test Preparation
2.1. Similarity Theory
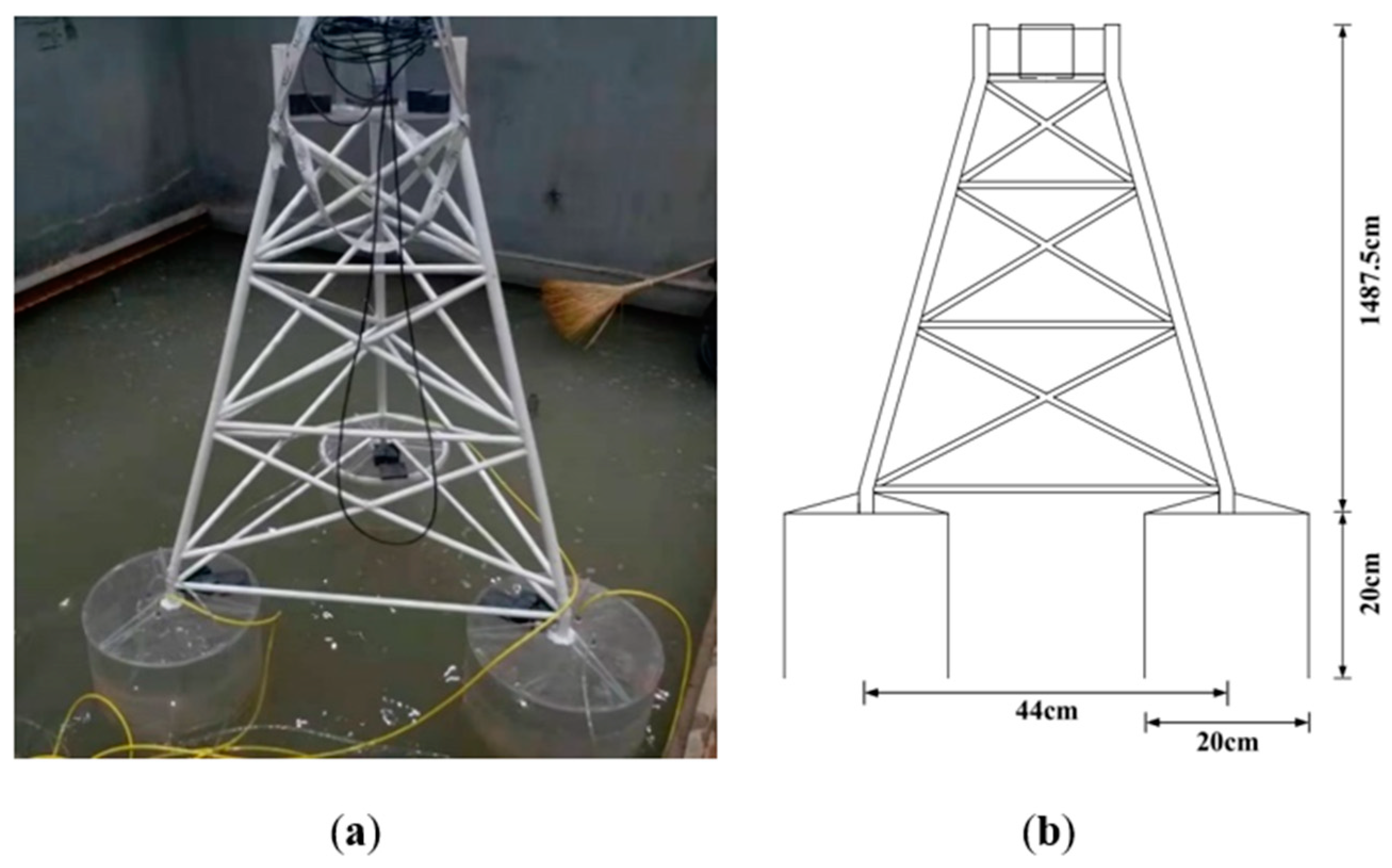
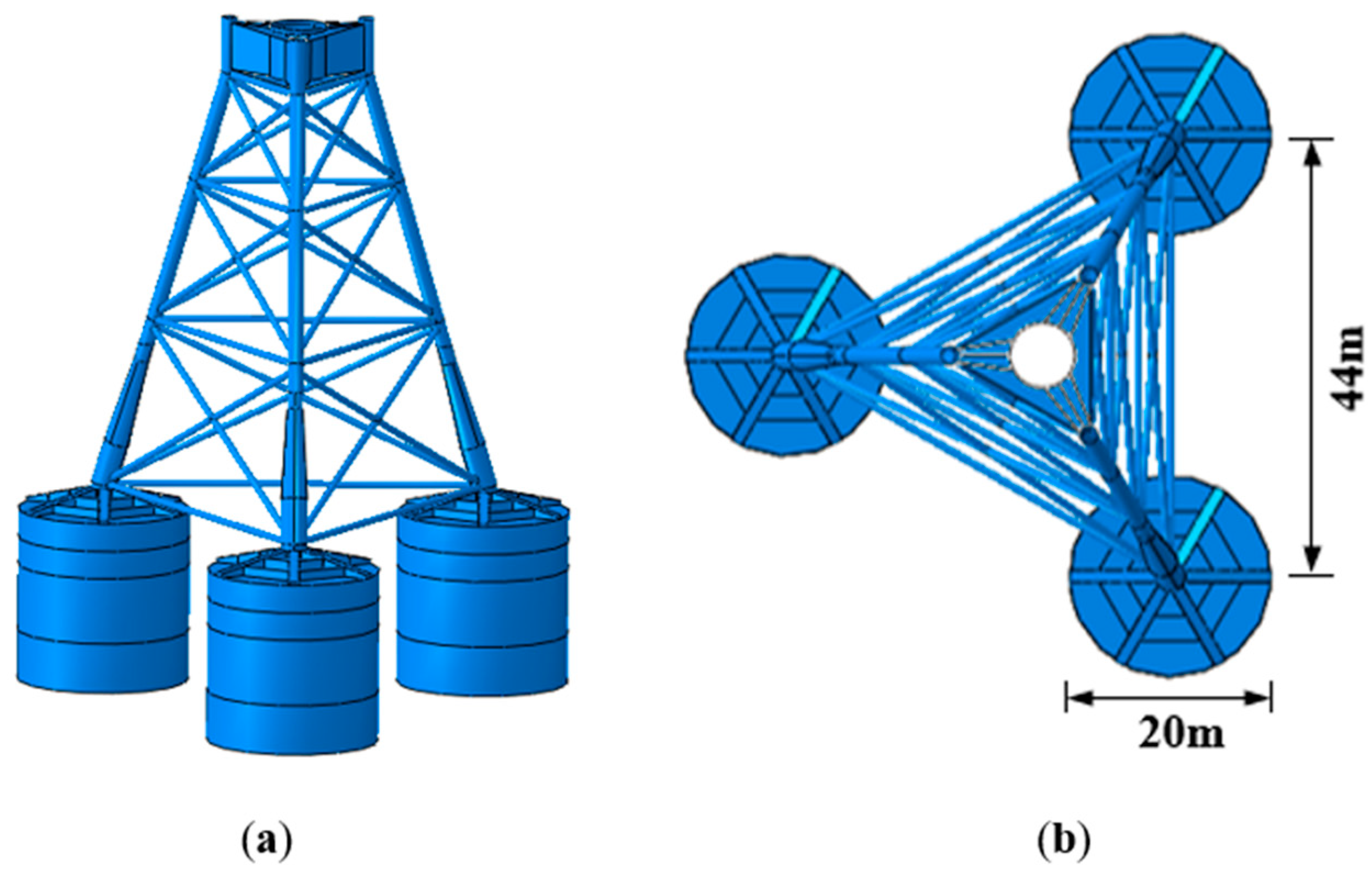
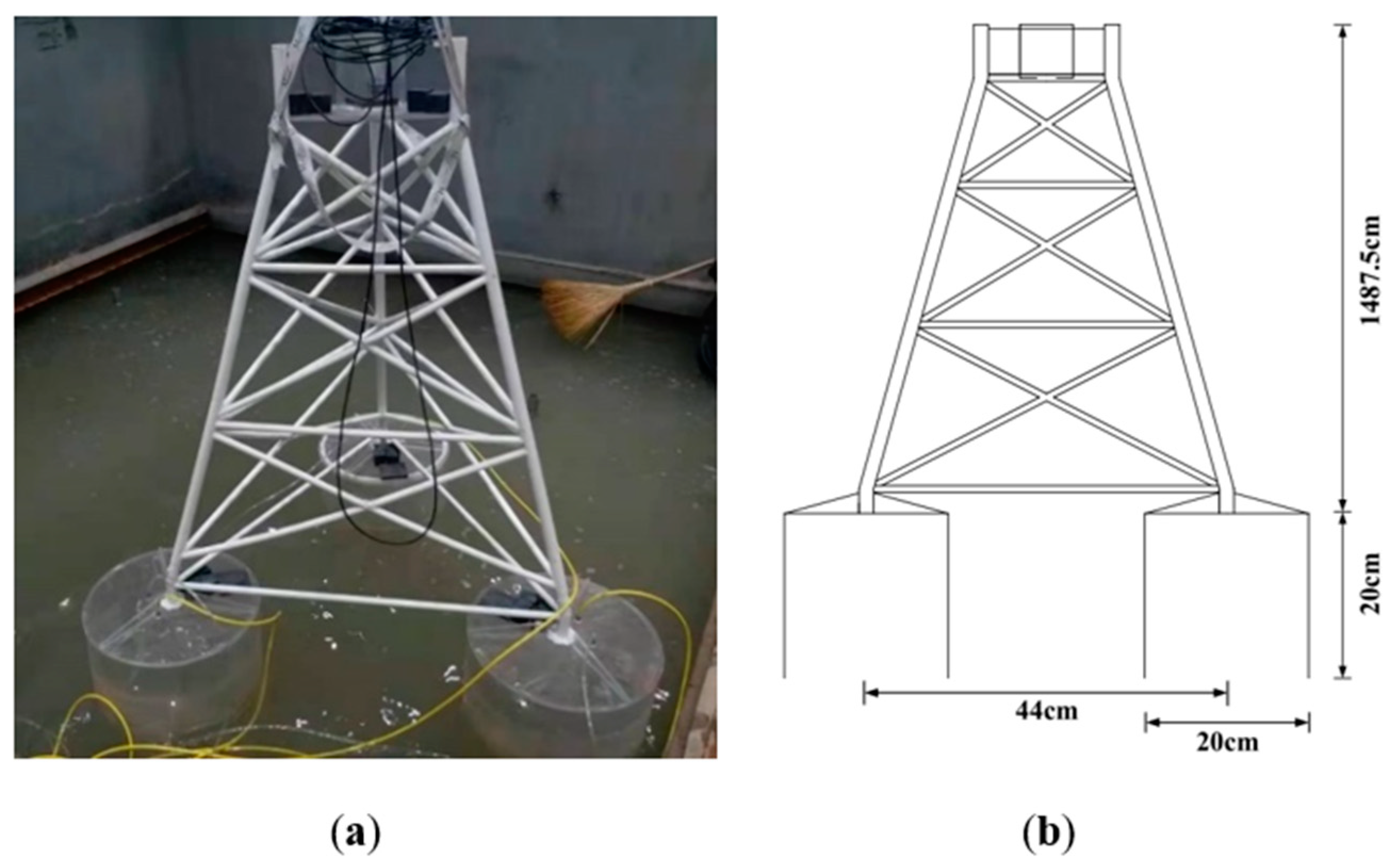
2.2. Model Design
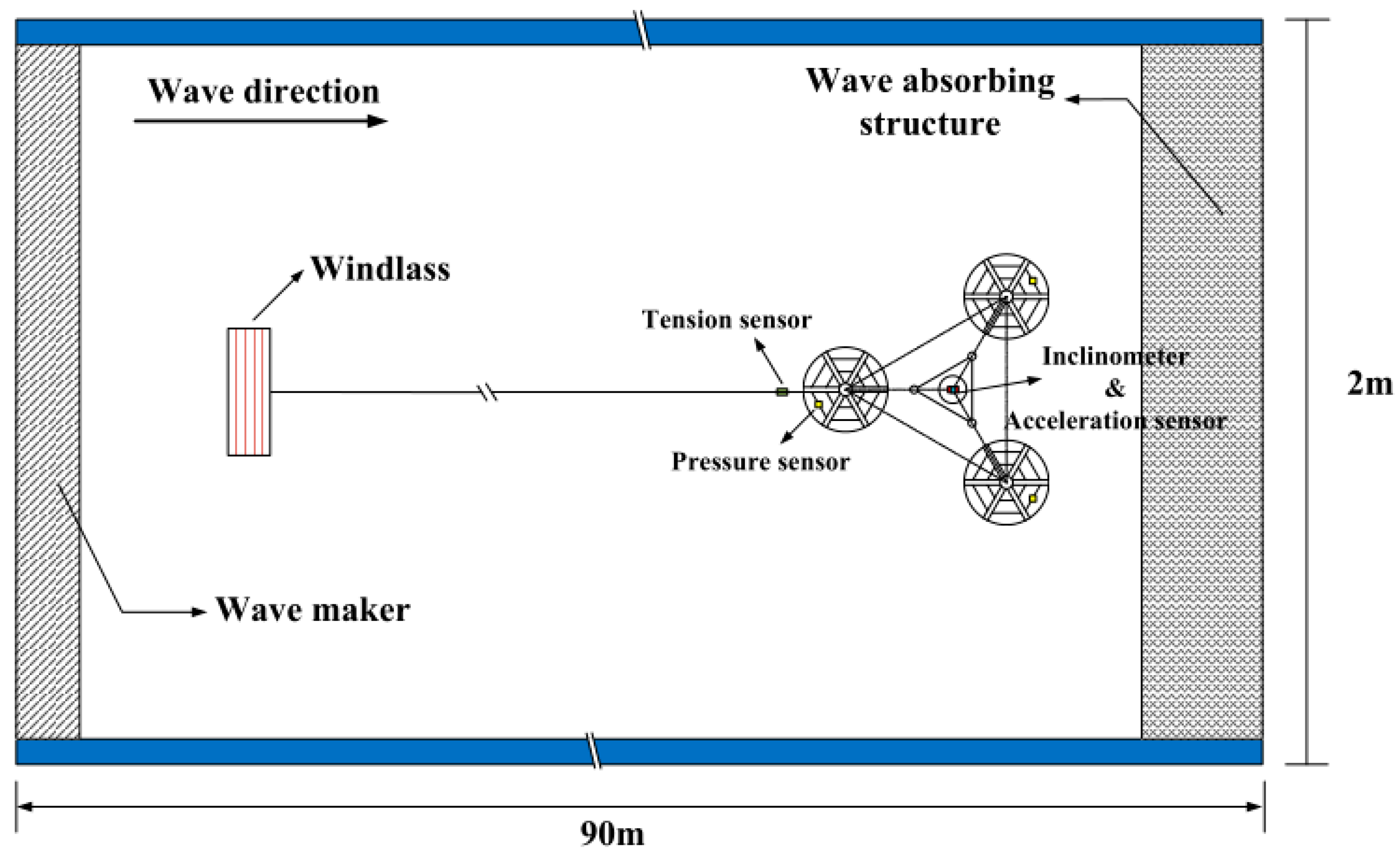
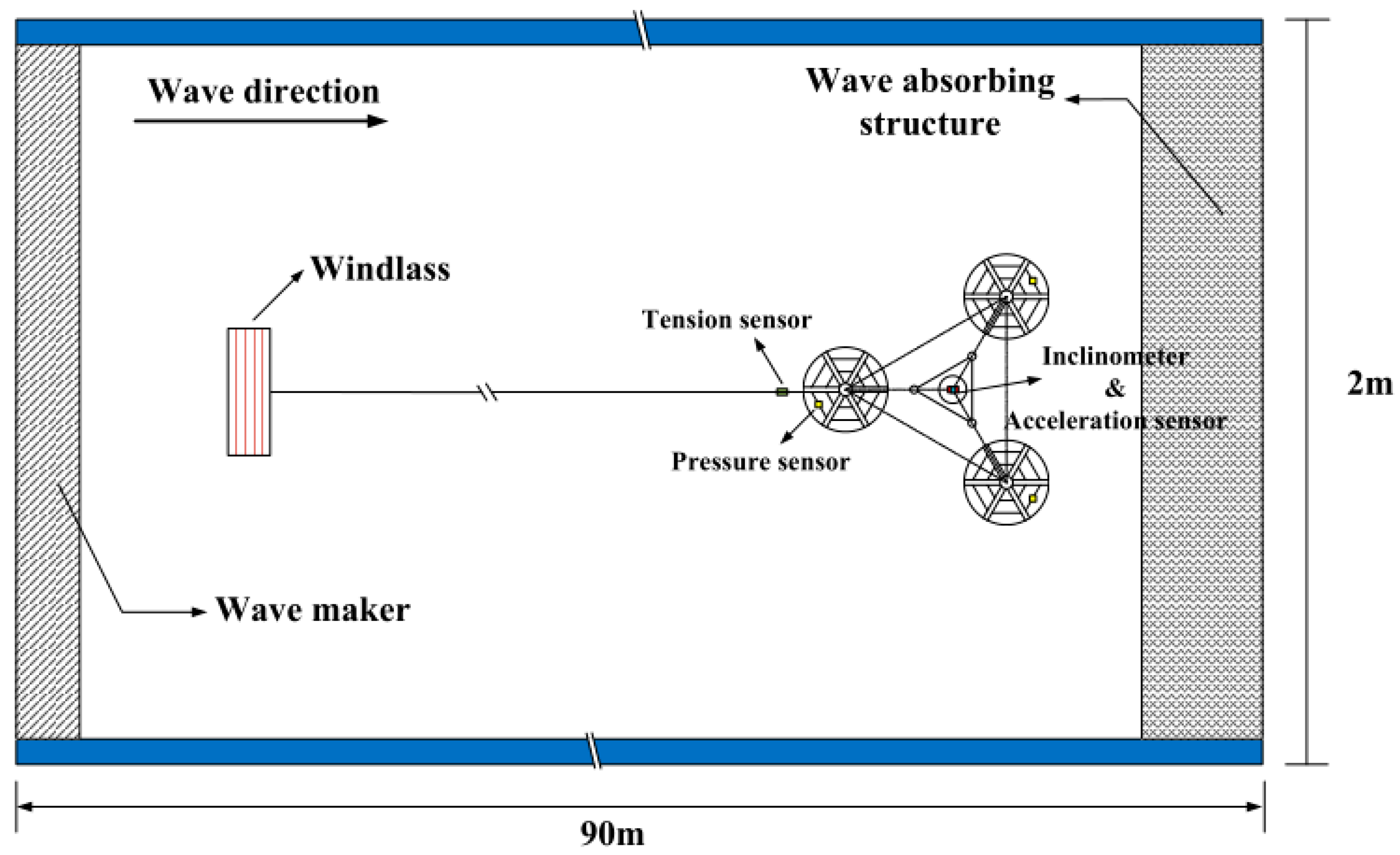
2.3. Test Arrangements
- (1)
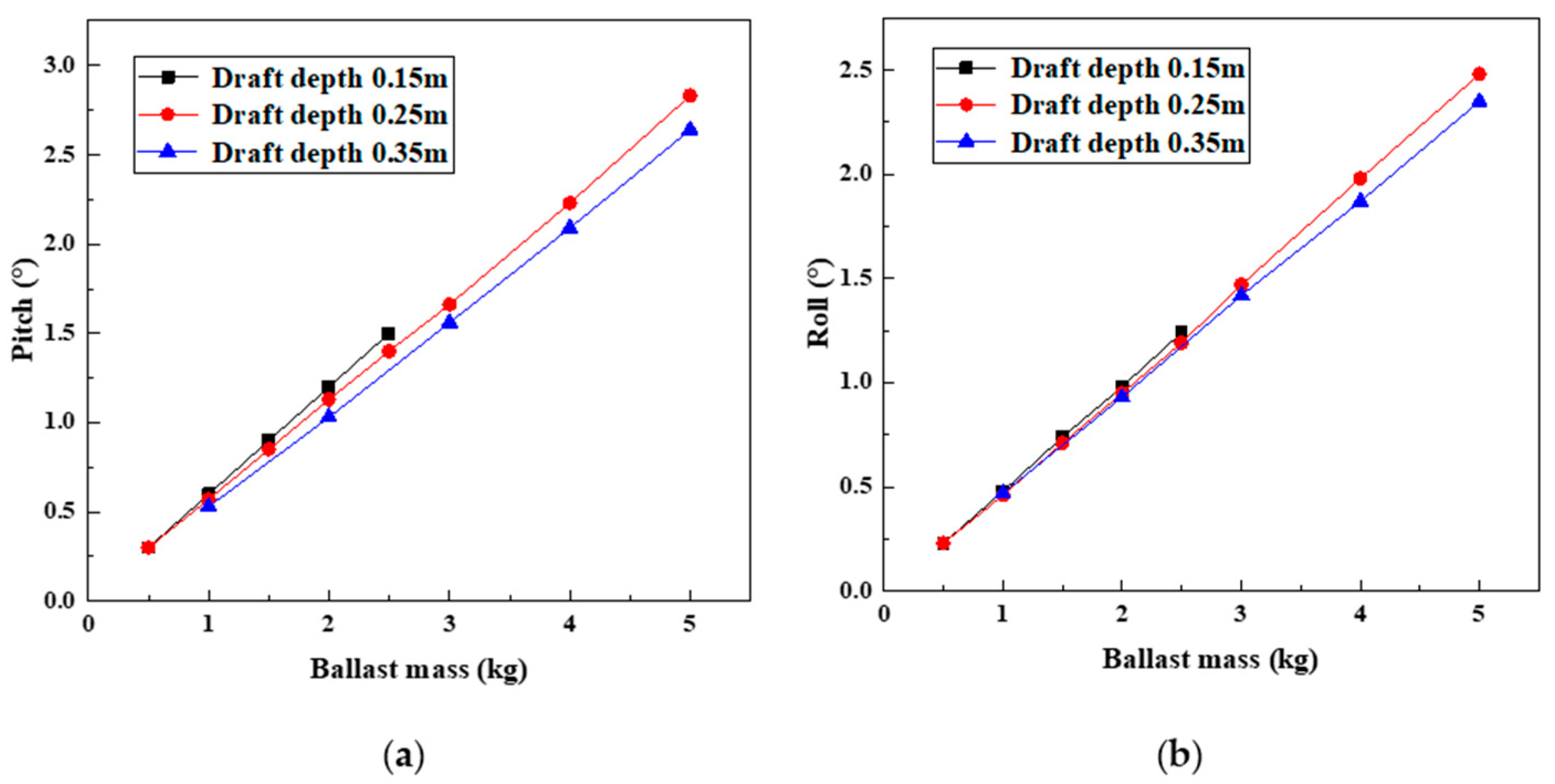
- The static stability test was carried out to analyze both the natural period variation law of the TBJF under different draft depths and the pitch and roll variation law of the TBJF for different drafts and eccentric loads.
- (2)
- The wet-towing stability test was carried out to analyze the stability of the TBJF for different wet-towing modes and sea conditions. The effects of different draft depths, positions of towing point, wave heights, and wave periods on the wet-towing stability were evaluated.
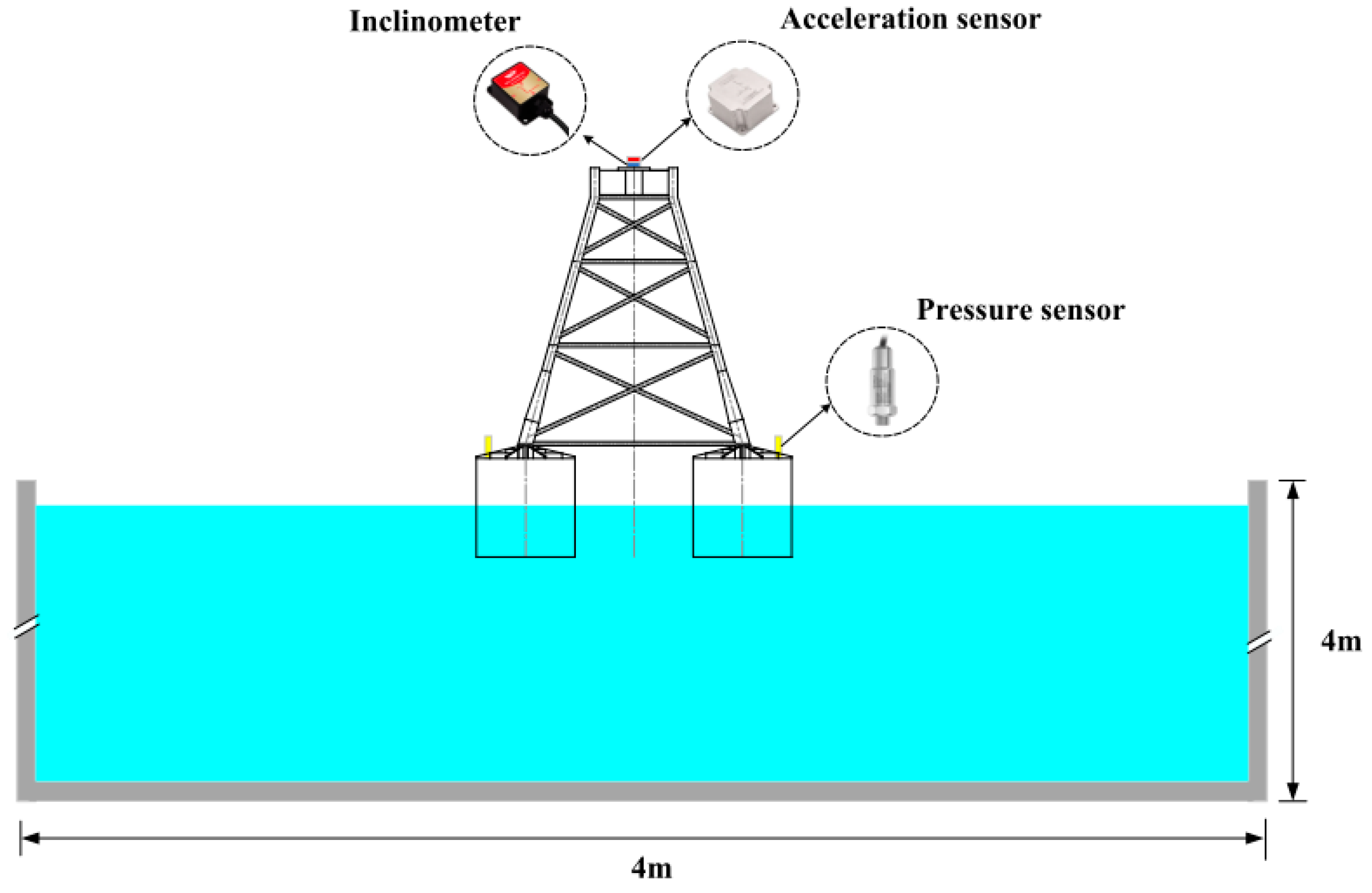
2.4. Test Equipments
3. Static Stability of the TBJF
3.1. Natural Period
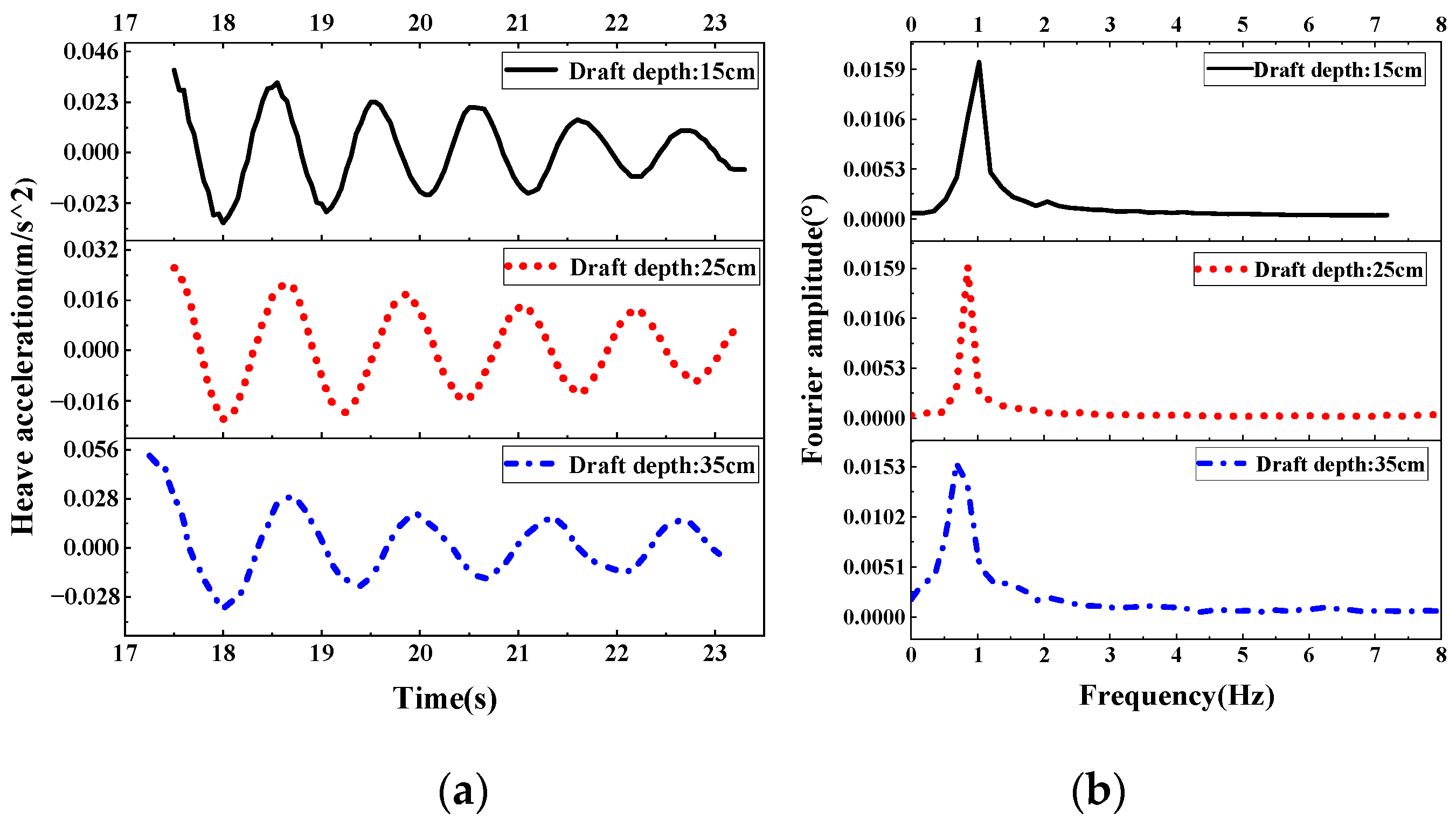
3.1.1. Natural Period of Heave
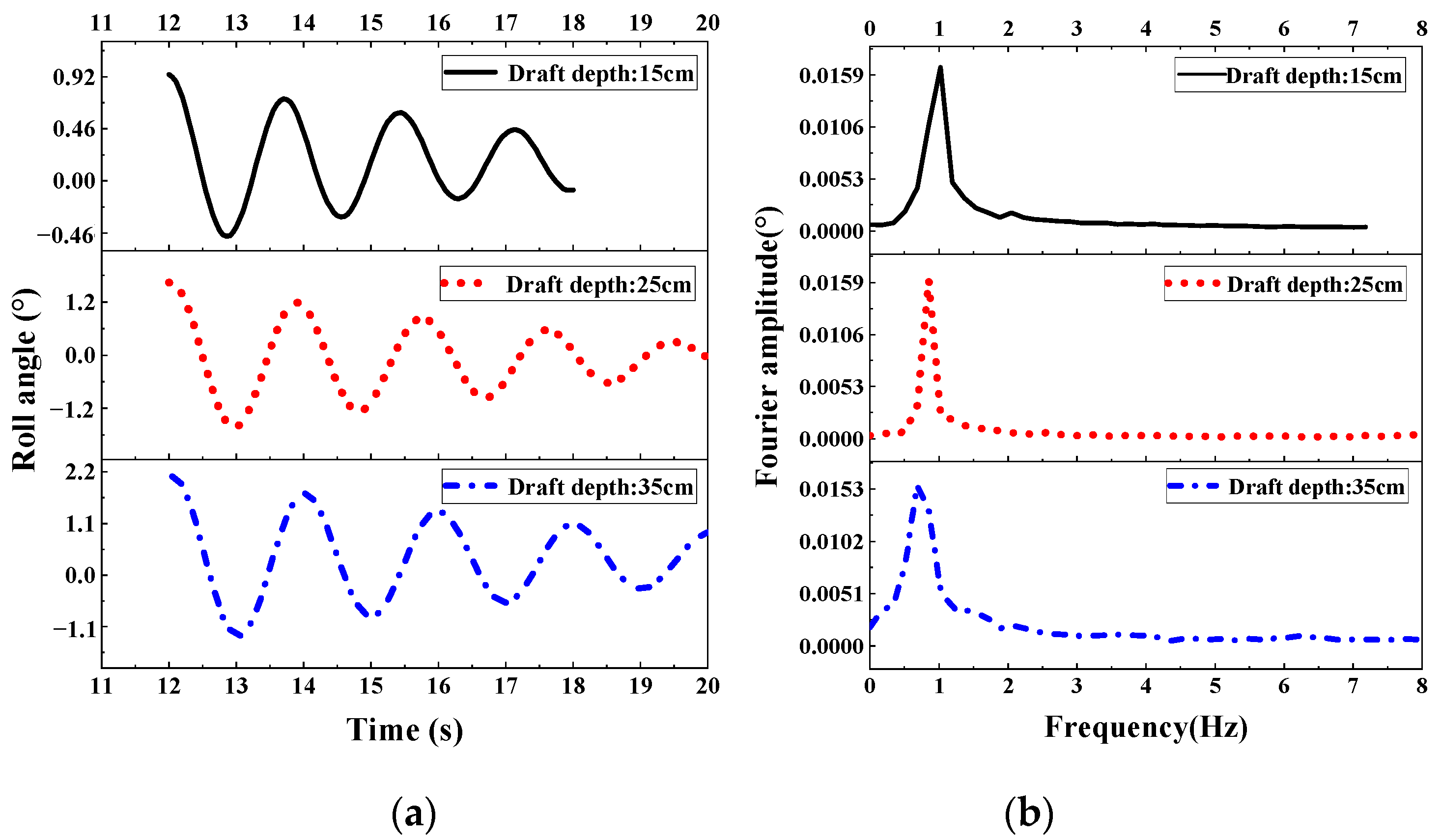
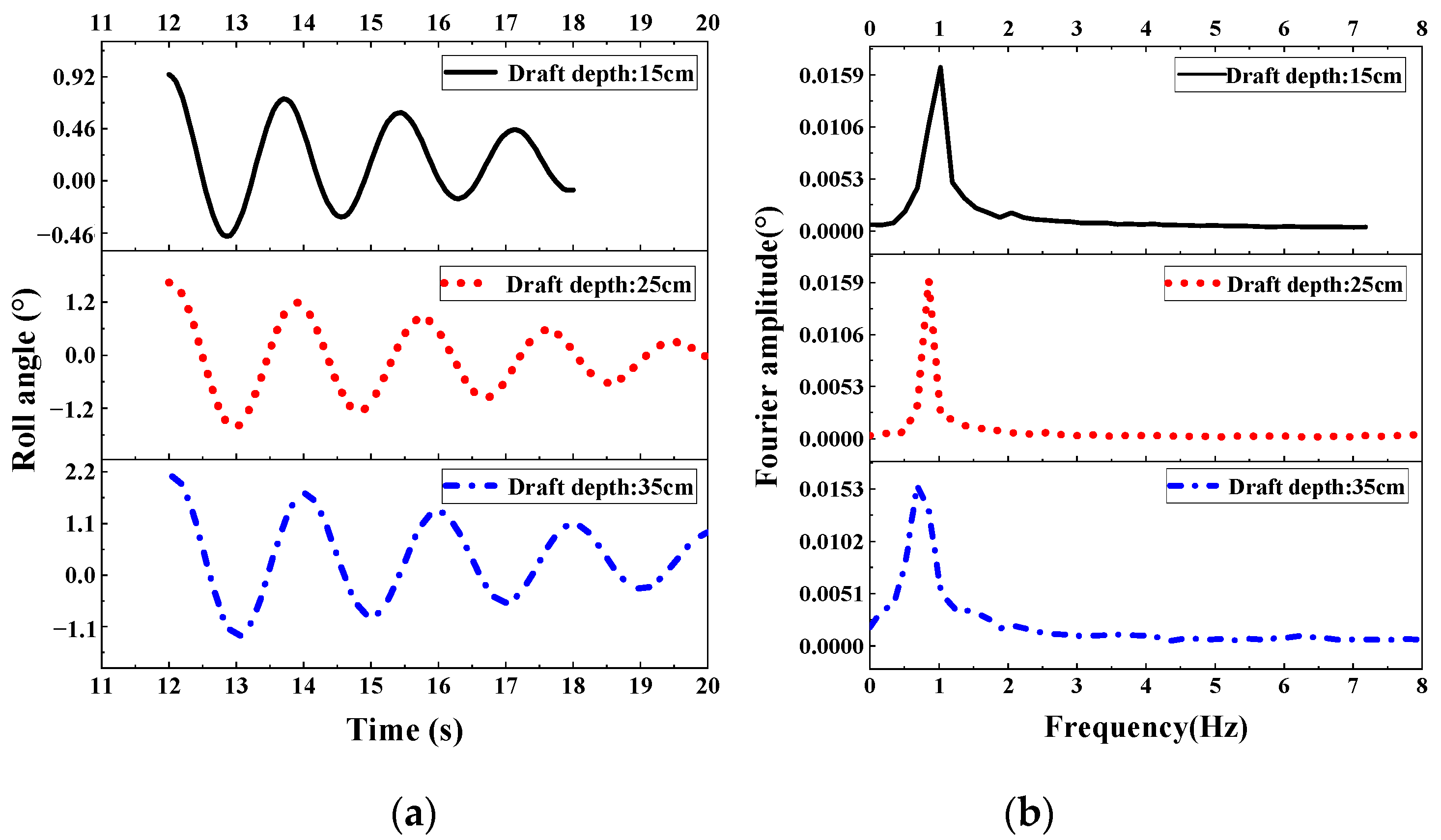
3.1.2. Natural Period of Roll
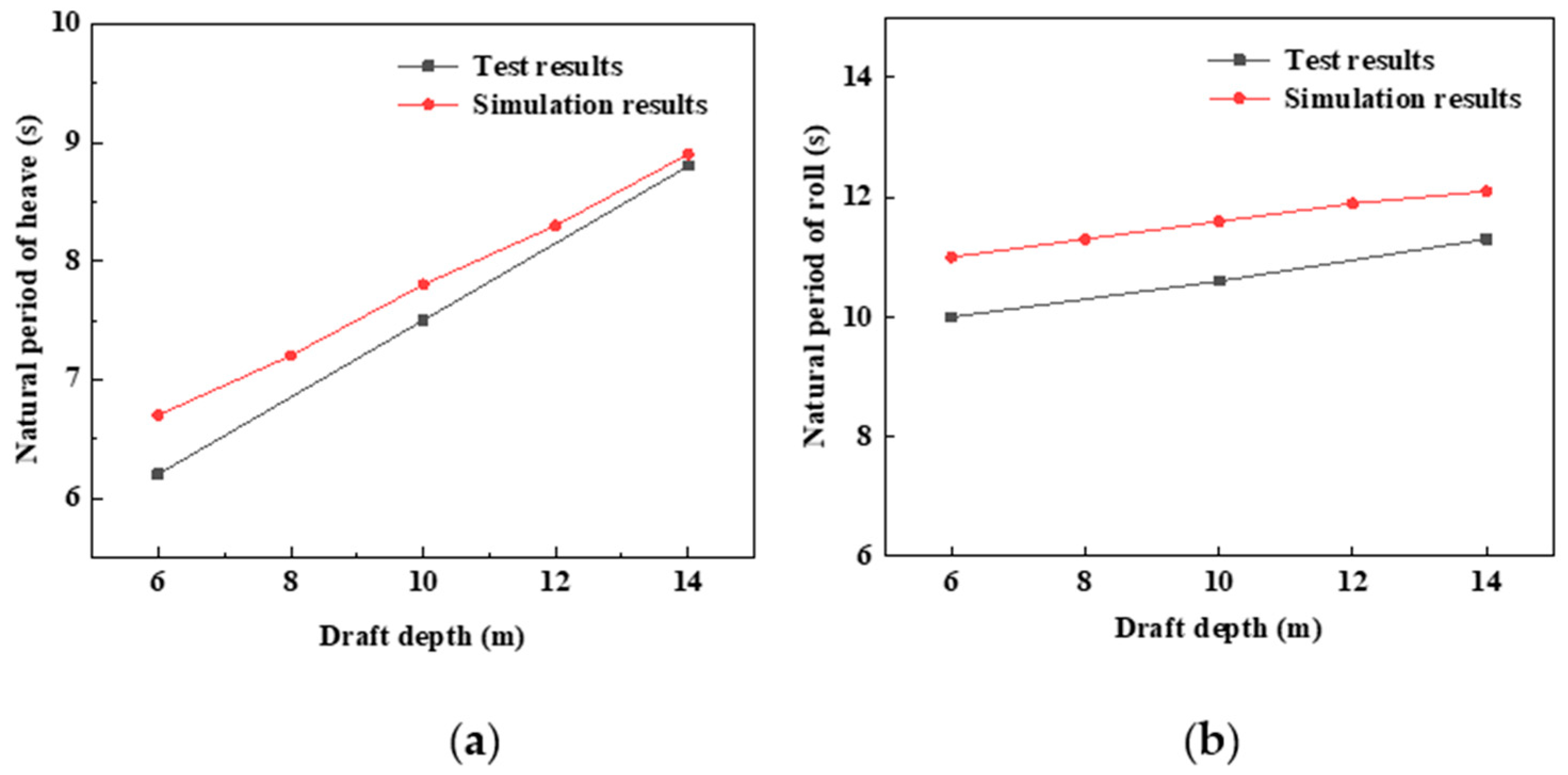
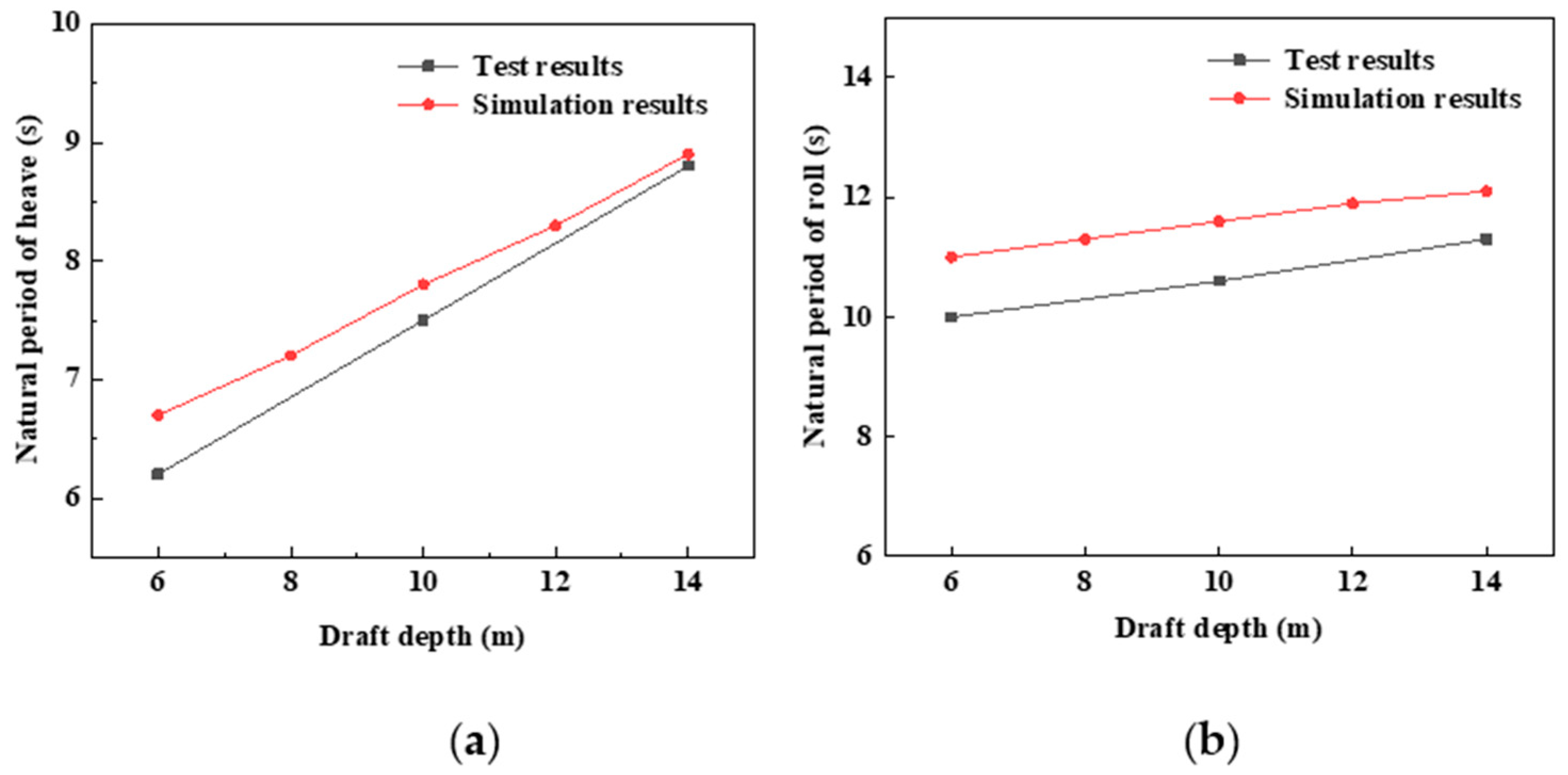
3.1.3. Numerical Simulation
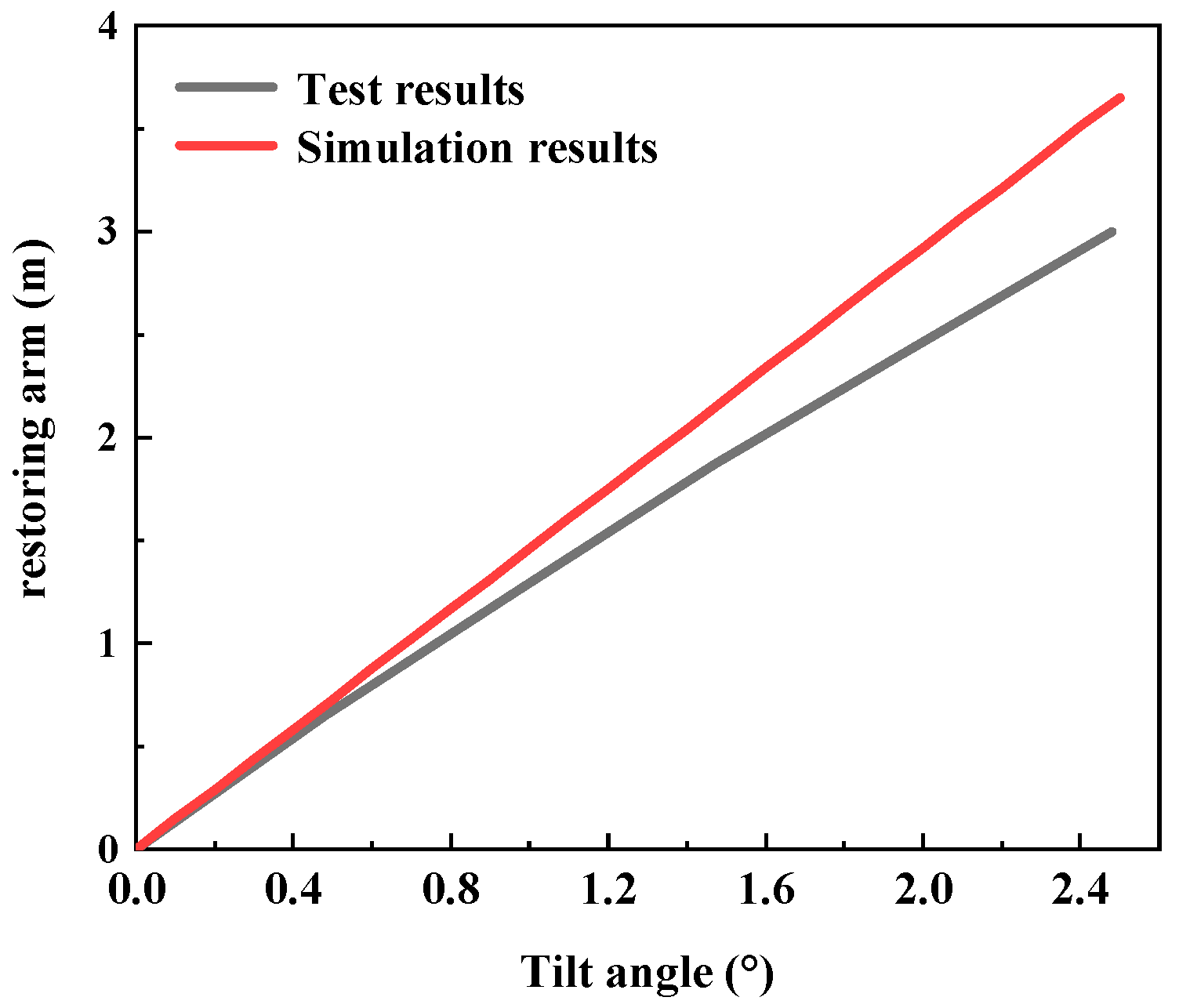
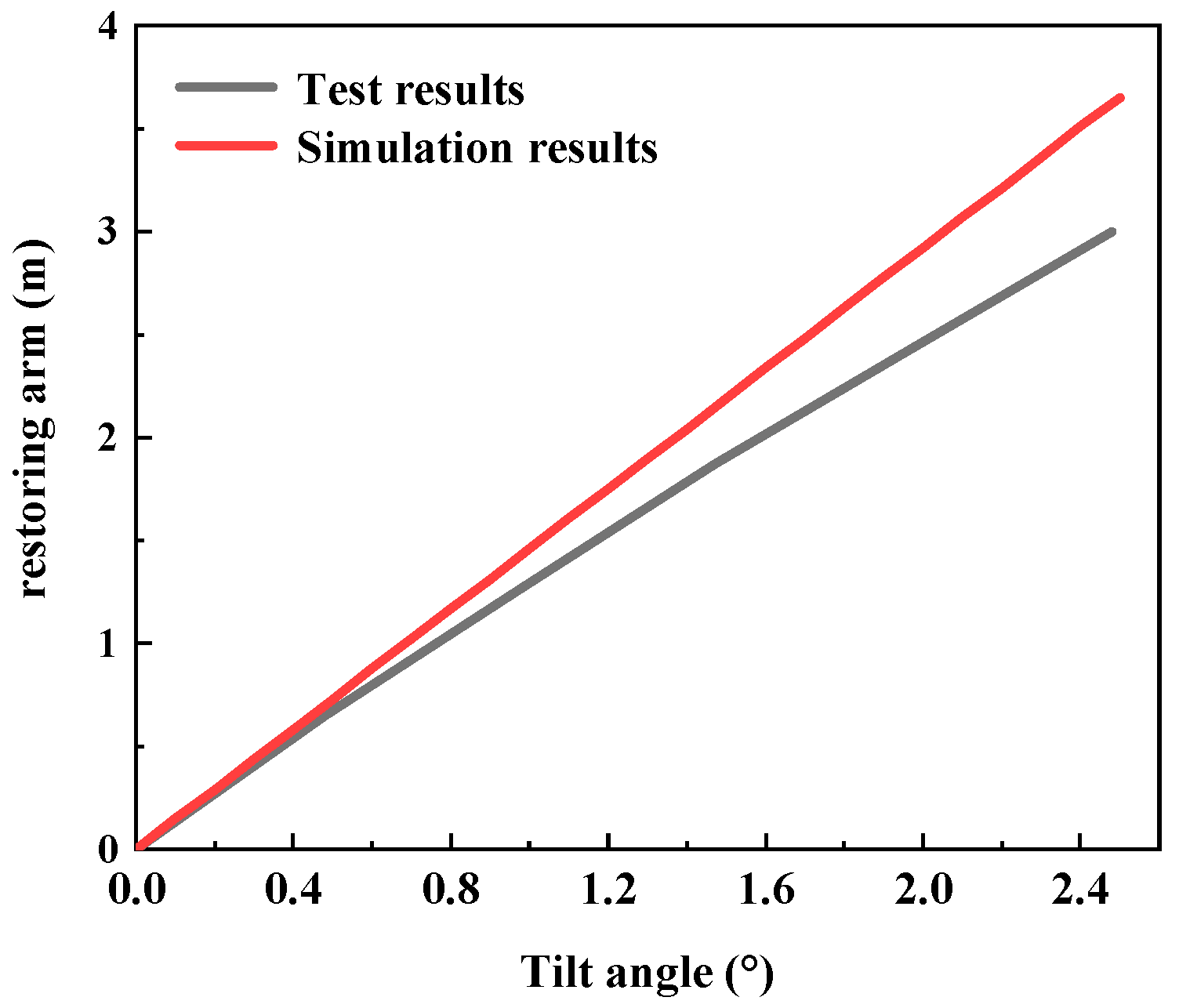
3.2. Static Stability of the TBJF
4. Wet-Towing Stability of the TBJF
4.1. Effect of the Wet-Towing Mode on the TBJF Stability
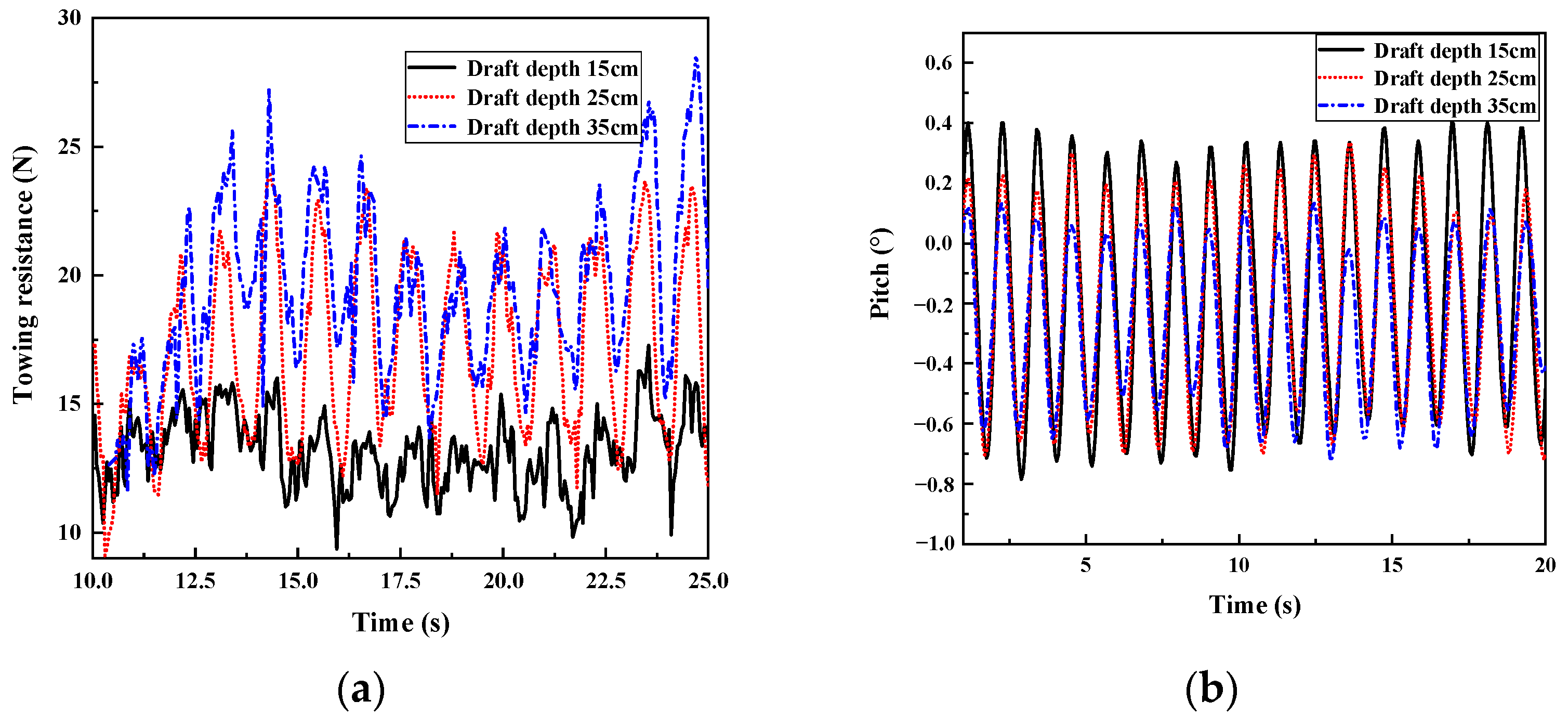
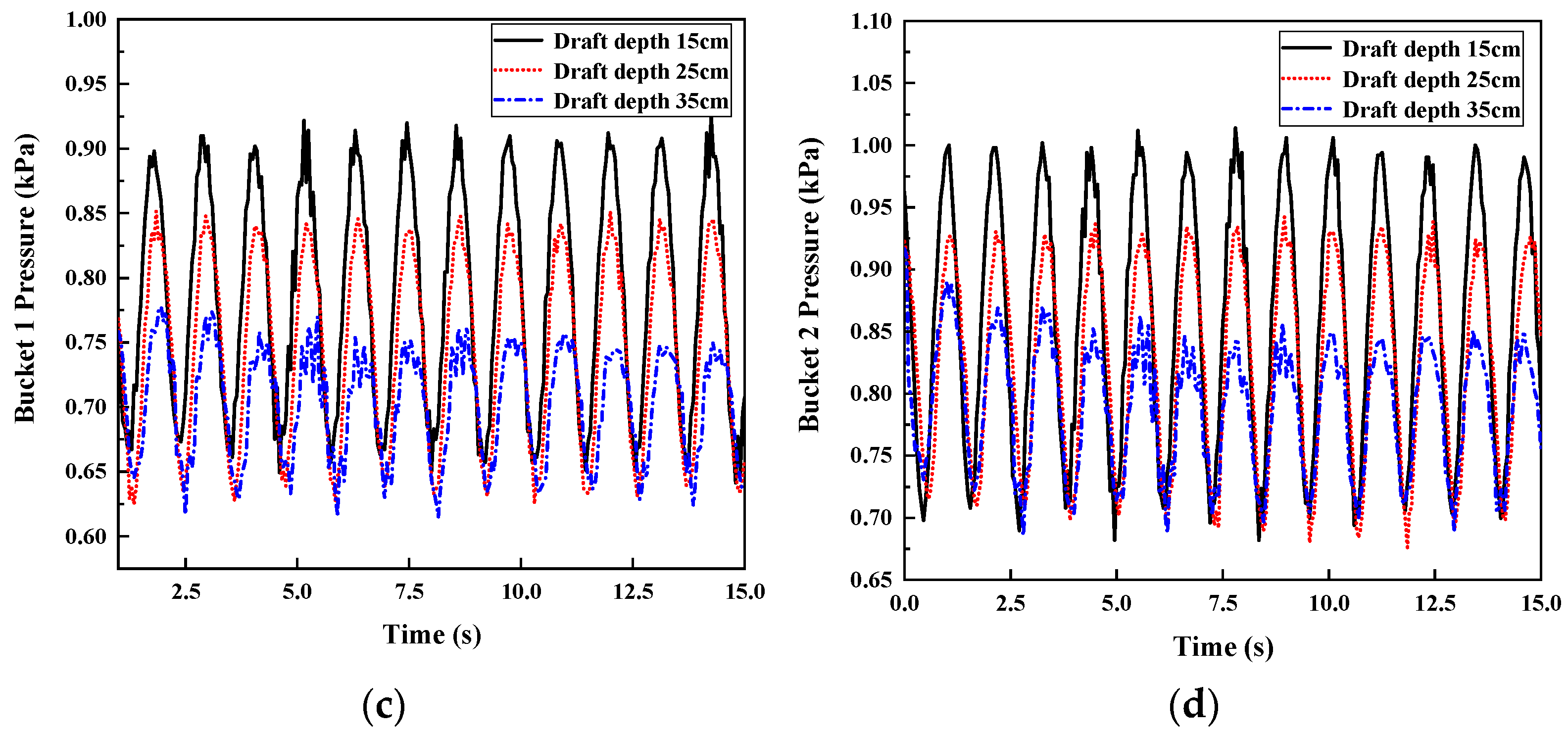
4.1.1. Effect of Draft Depth
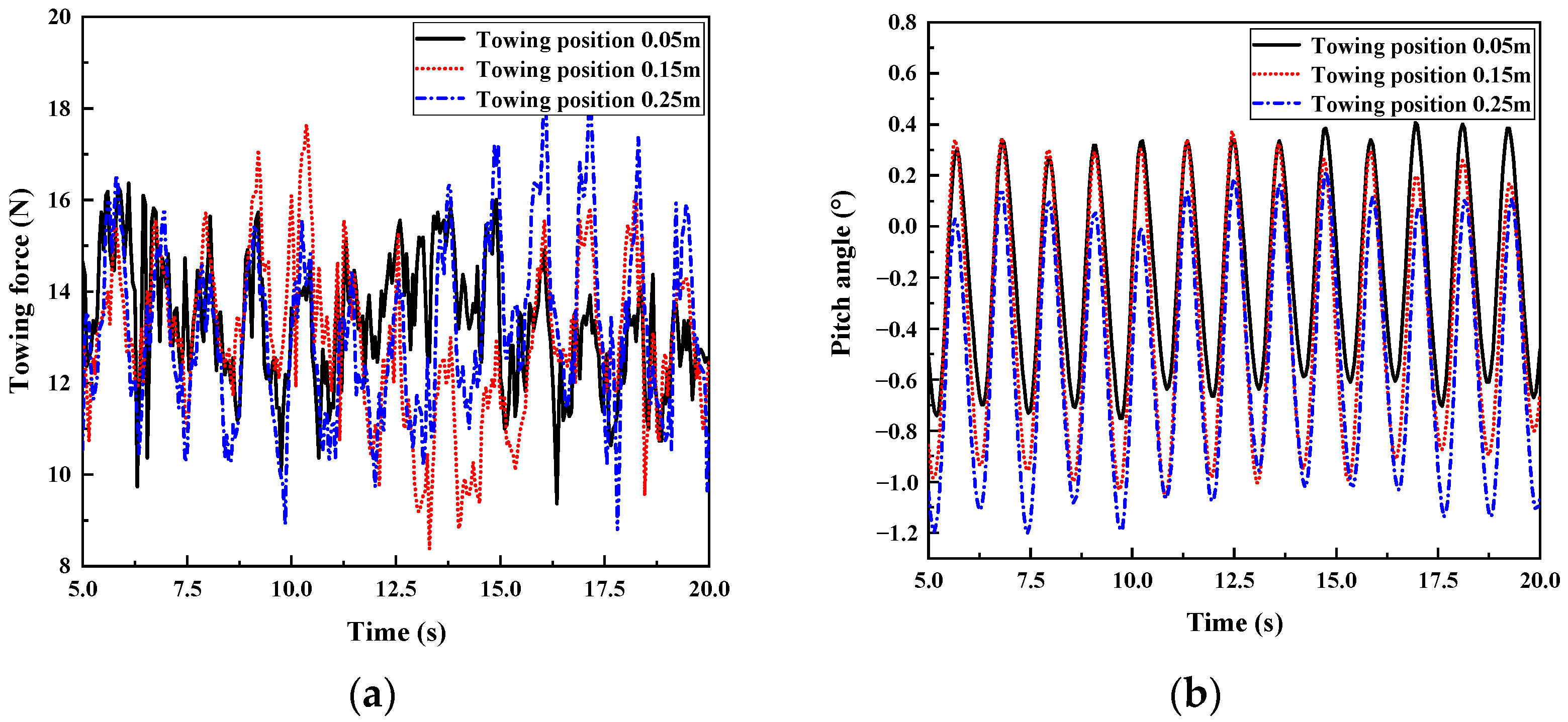
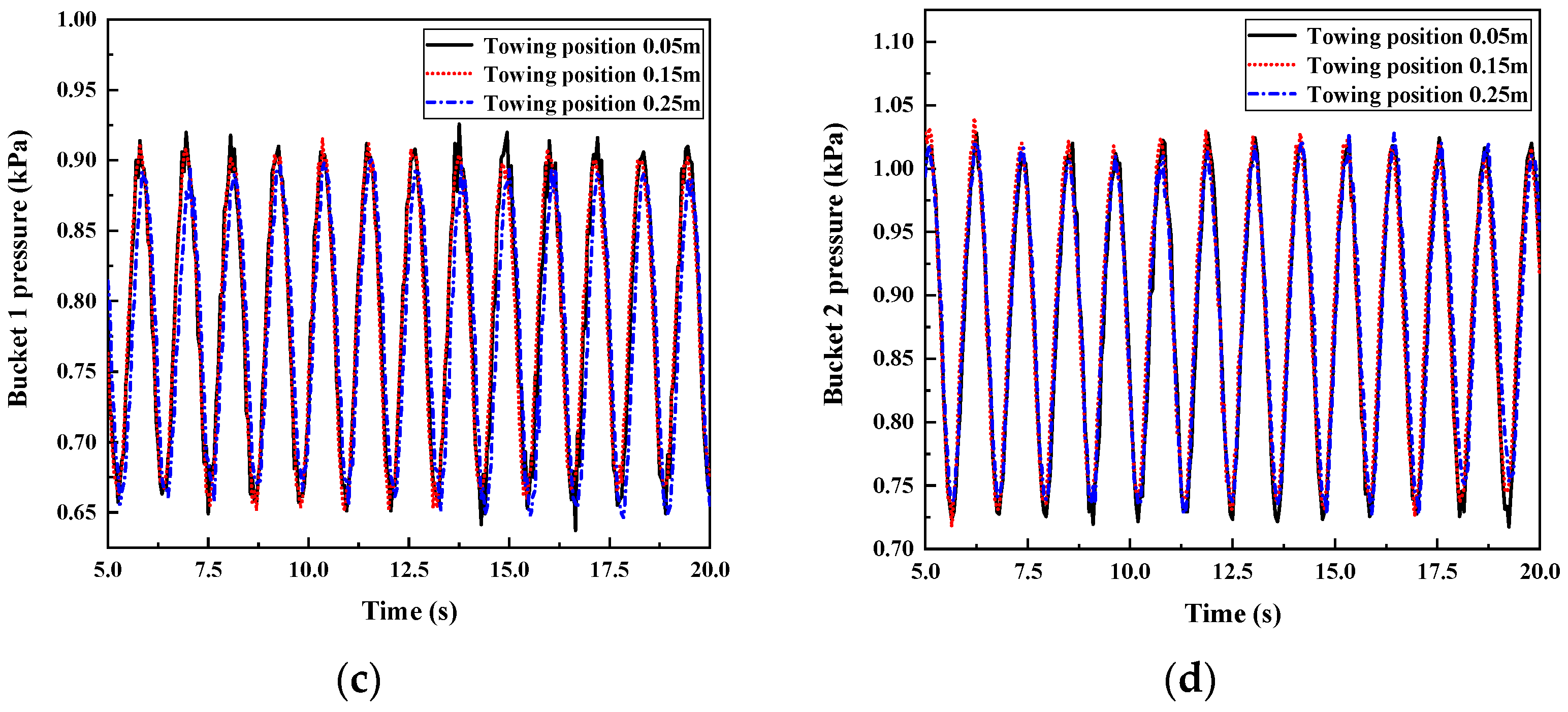
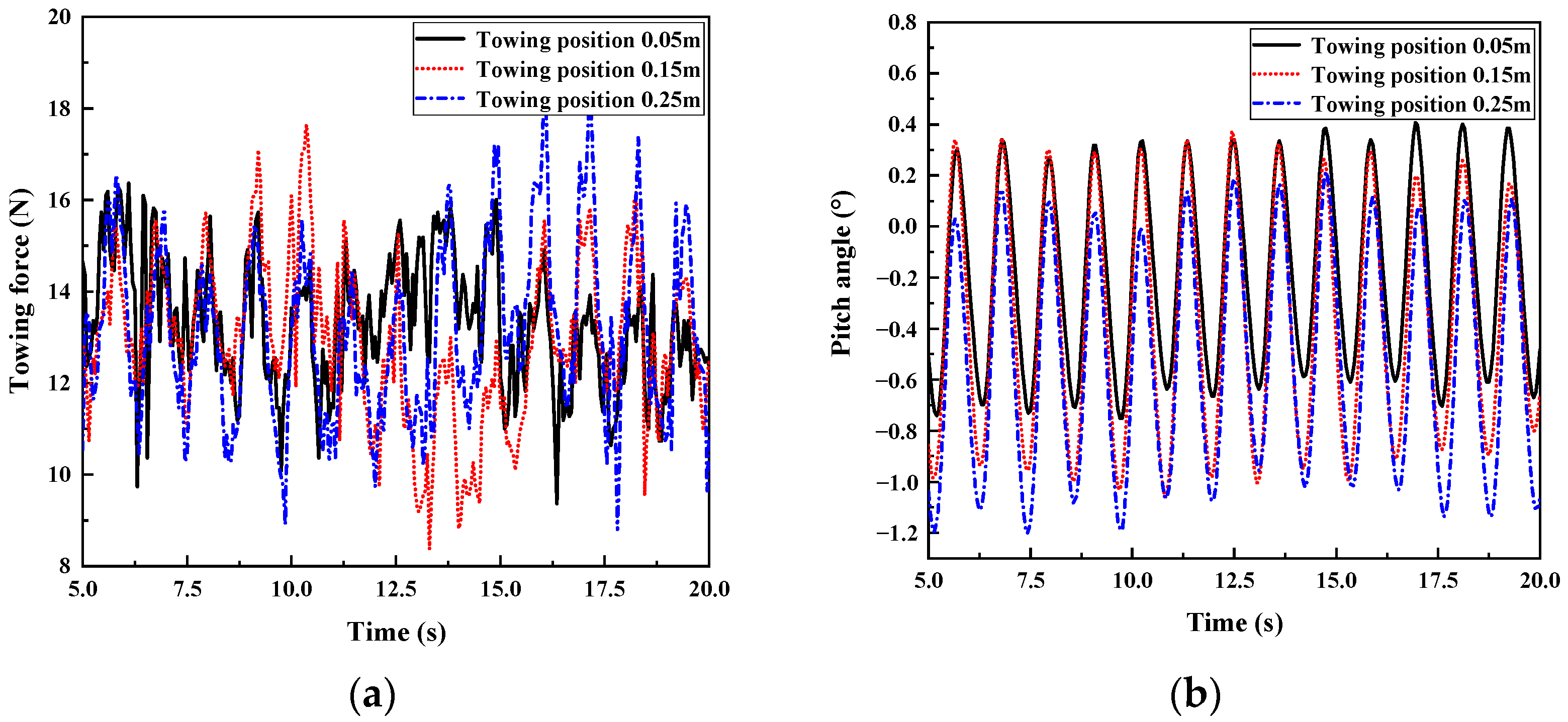
4.1.2. Effect of the Towing Position
4.2. Effect of the Sea Condition on the TBJF Stability
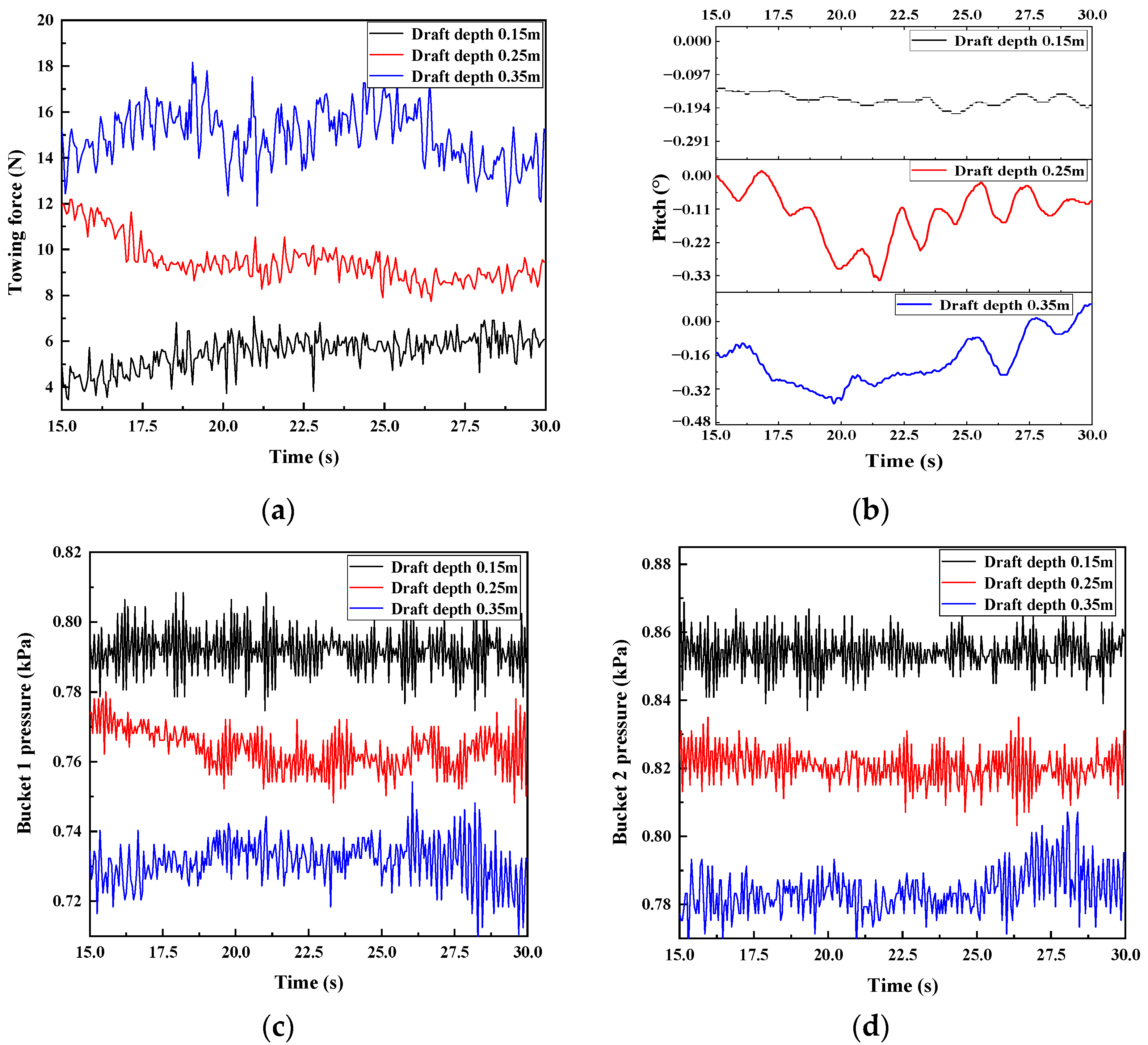
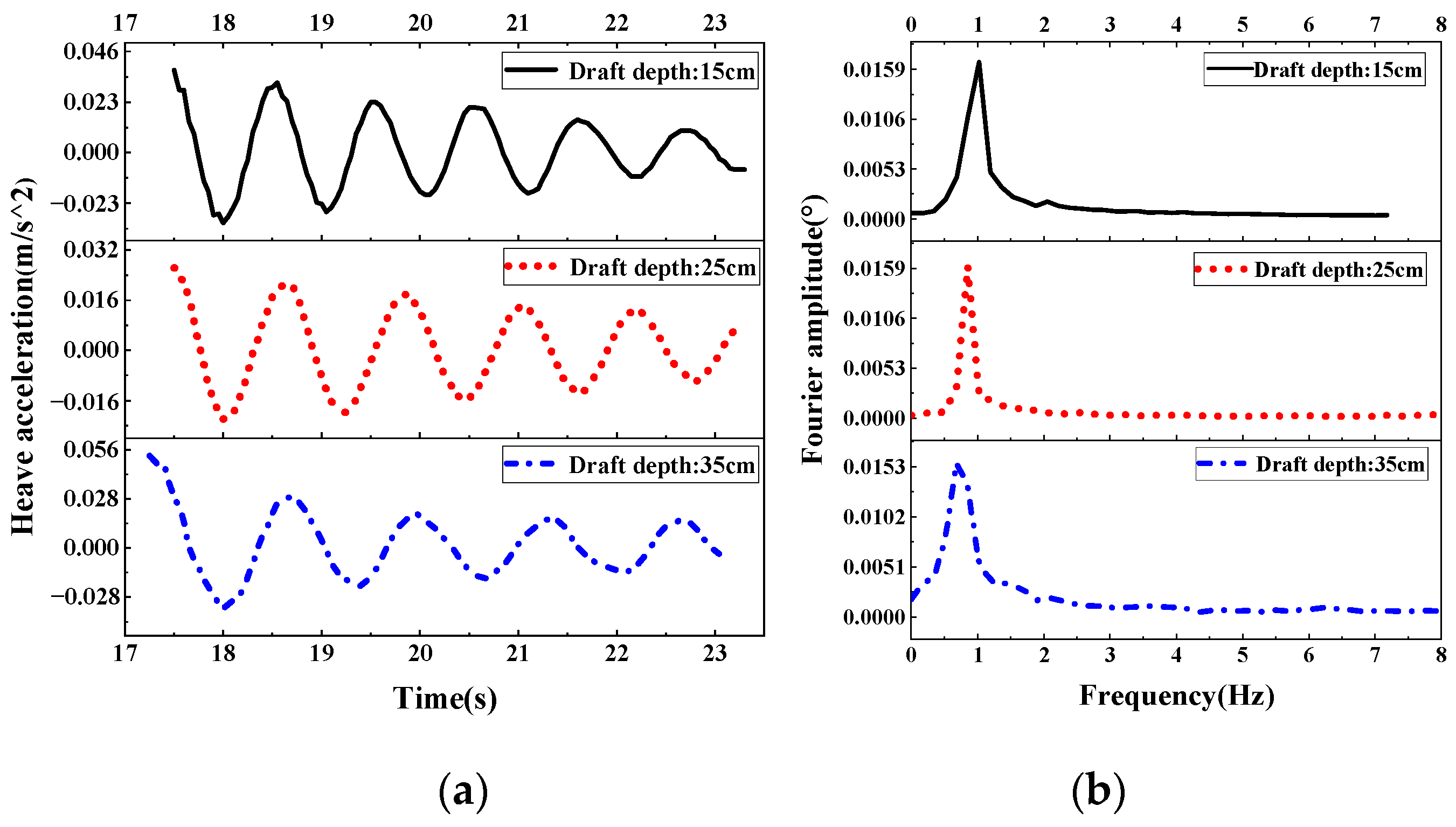
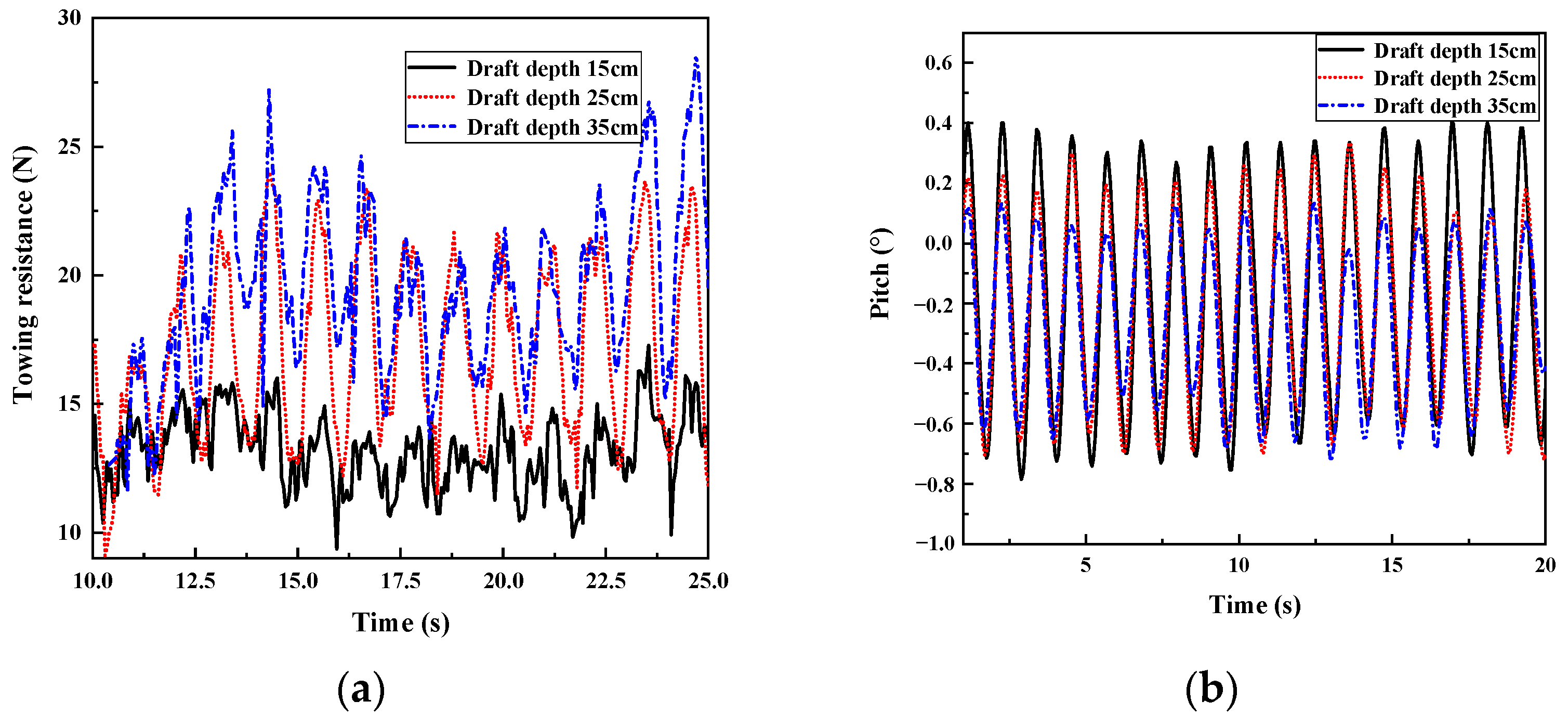
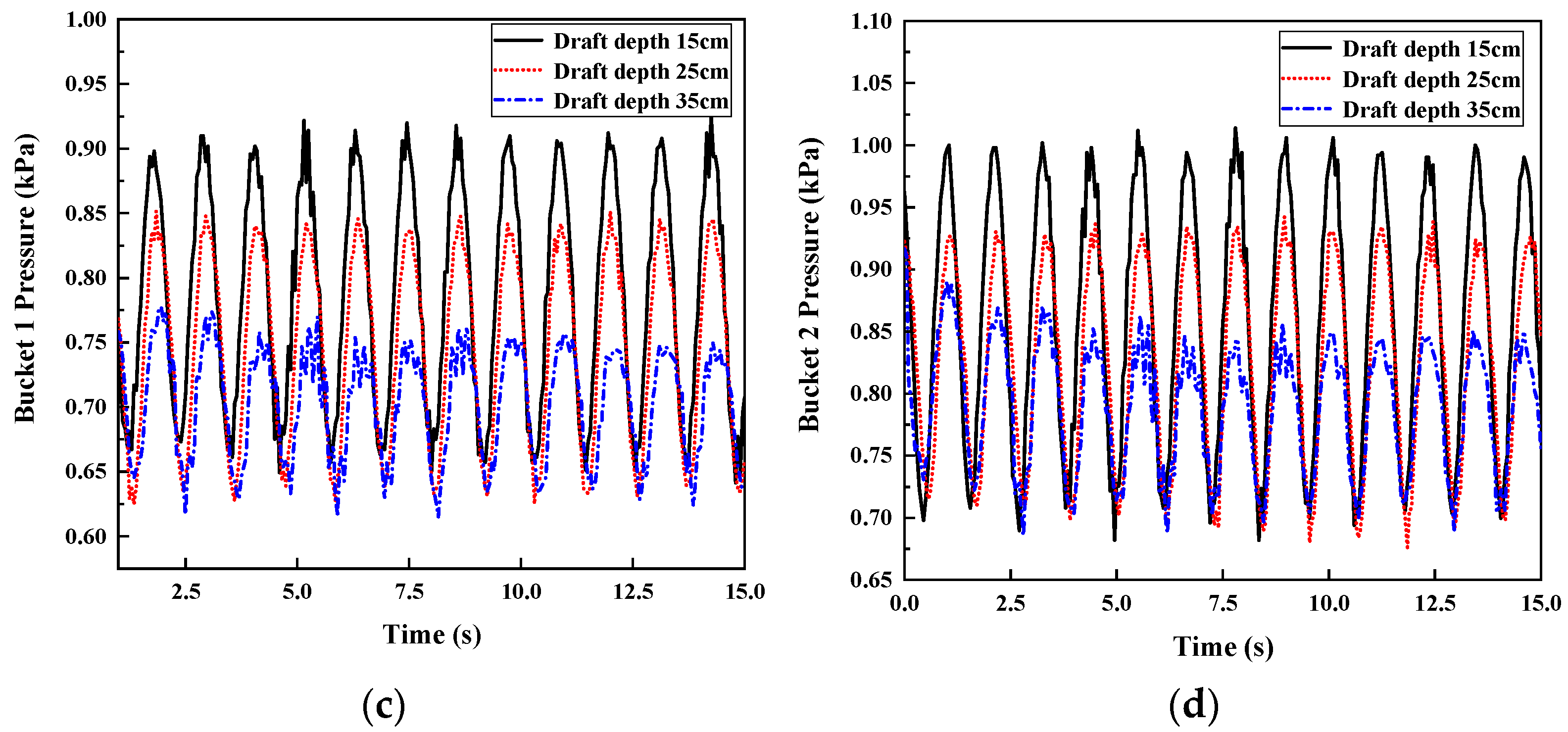
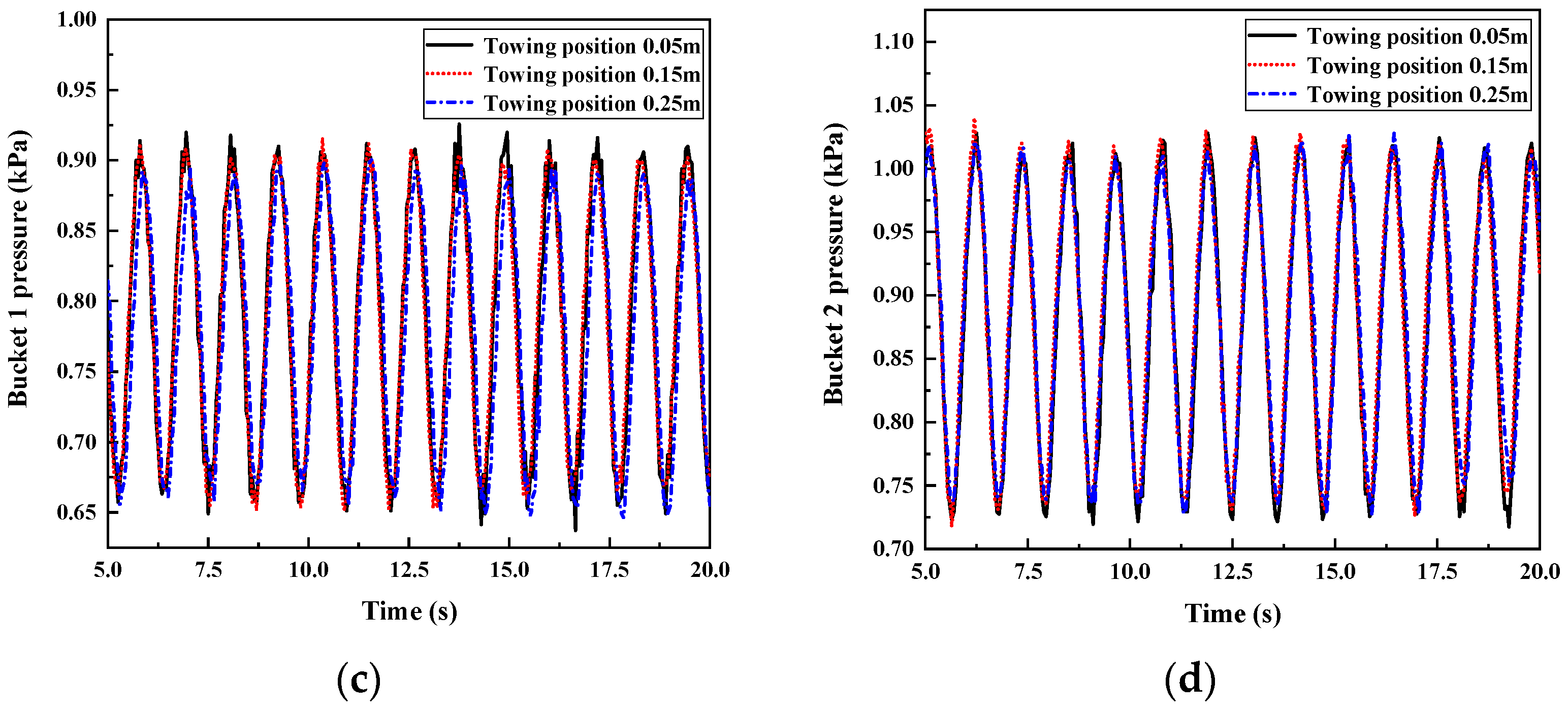
4.2.1. Effect of the Draft Depth
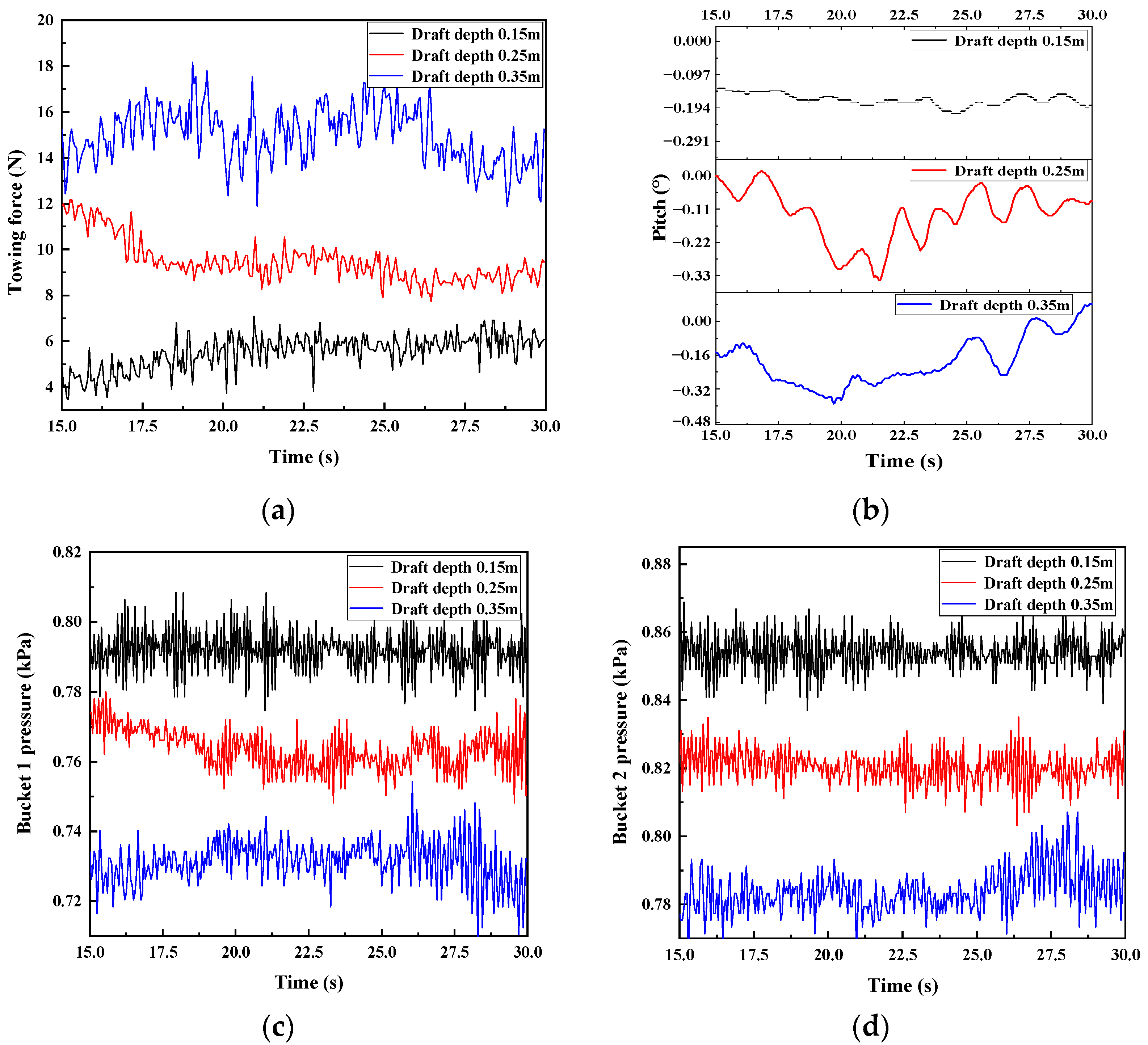
4.2.2. Effect of Wave Height
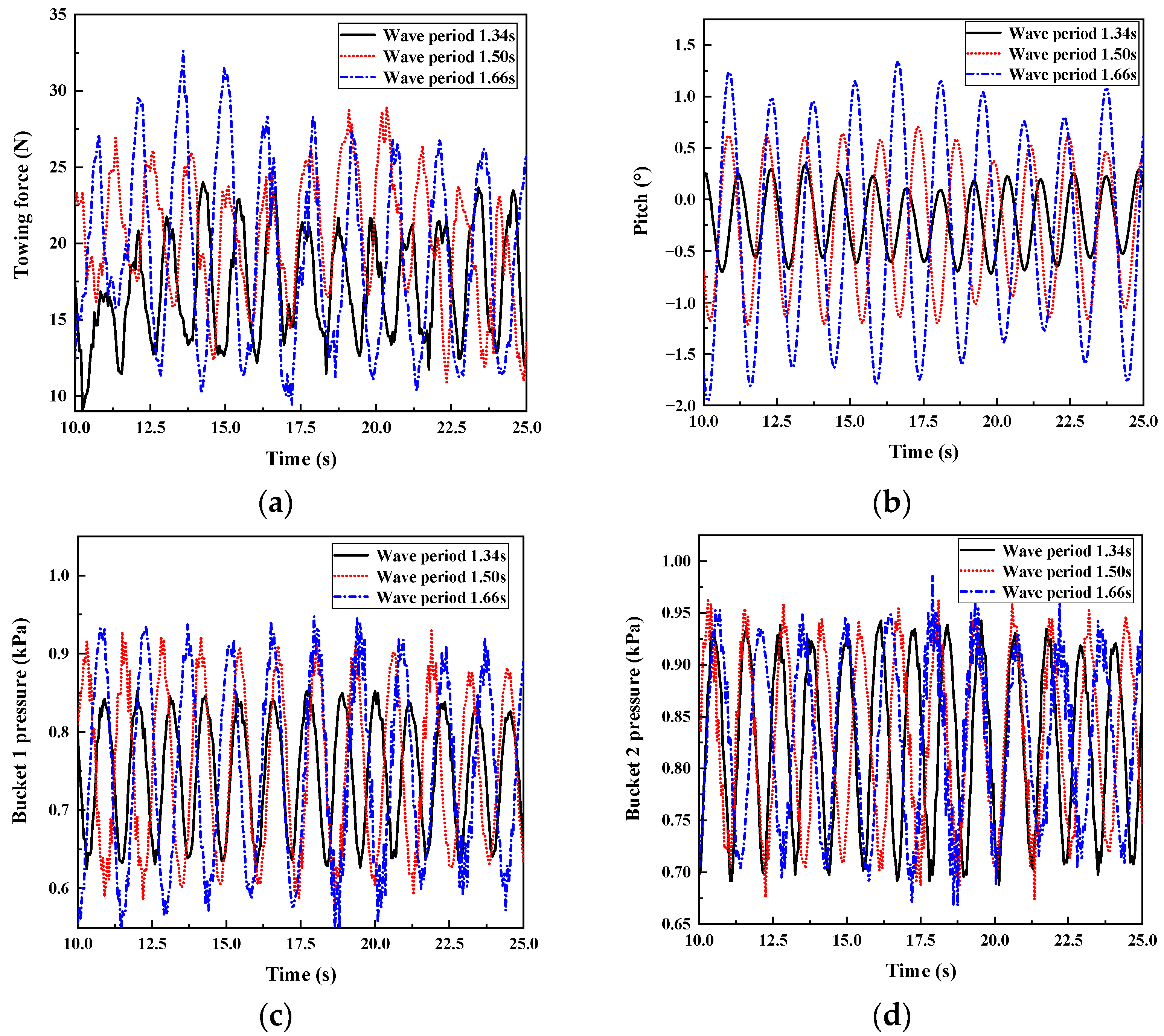
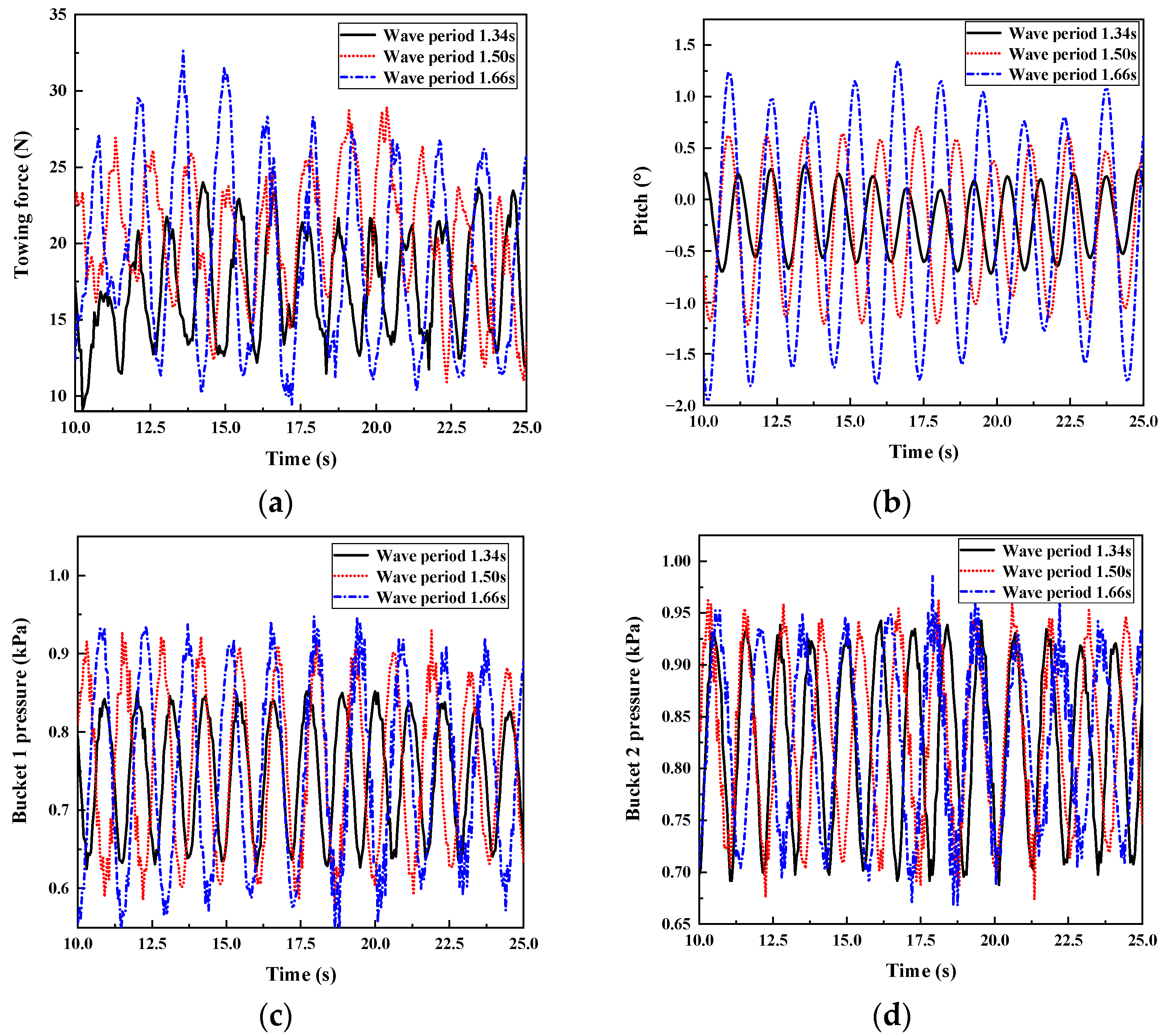
4.2.3. Effect of the Wave Period
5. Conclusions
- The “Jacket + triple-bucket foundation” composite structure performs good self-stability. With increasing draft depth, the additional water mass of the structure, the natural periods of heave and roll for the TBJF increased, and the maximum difference of results between the test and the simulation was within 10%. A greater eccentric load led to a higher roll and pitch, and the maximum difference of results between the test and the simulation was within 20%.
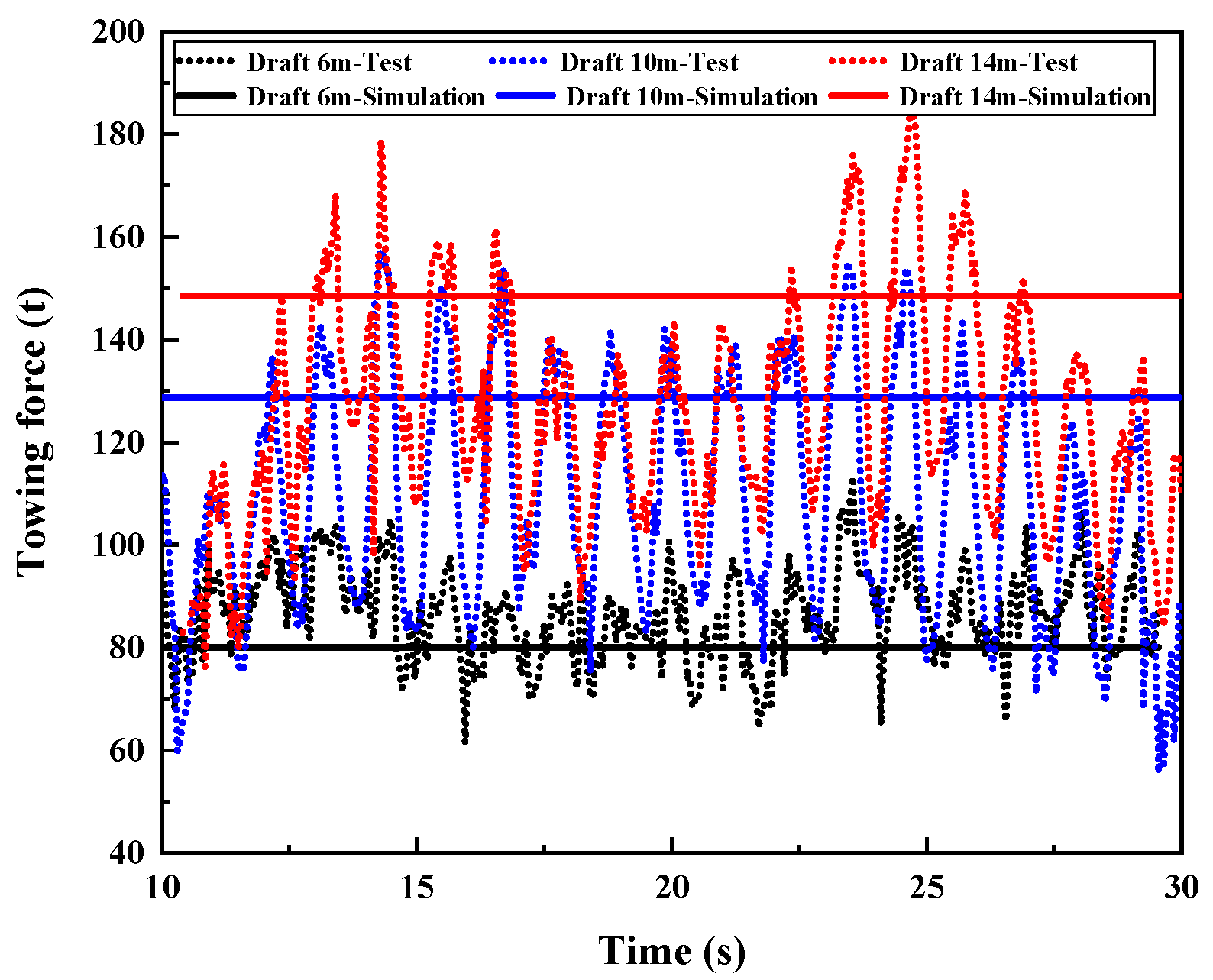
- The integrated long-distance wet-towing of the “Jacket + triple-bucket foundation” composite structure was applicable. With increasing draft depth, the towing resistance increased, while the pitch and the air pressure in each bucket decreased. A 10-m (half-bucket high) draft depth is recommended for the integrated wet-towing of the foundation. With the increase in the height of the towing position, the towing force increased slightly, and the fluctuation range of pitch increased. This had a negligible effect on the air pressure in the buckets.
- The wave height poses a great impact on the integrated stability and dynamic response of the “Jacket + triple-bucket foundation” composite structure. With increasing wave height, the forward speed of the TBJF during the towing process decreased. In addition, the amplitude and variation range for the towing force as well as the pitch and the air pressure in each bucket increased. The towing stability became worse. It is recommended to carry out long-distance wet-towing within a 2-m wave height and a grade-5 wind and wave environment.
- The maximum towing force was revealed rarely beyond 385 knots when the TBJF was towed at a speed of around 2.58 knots against waves under conditions of a grade-5 wind and wave environment. In the actual towing process, the towing force under the most unfavorable sea conditions should be fully considered, and the tug with appropriate horsepower should be selected.
- When the wave period is close to the structural natural period and the wave height is large, the structural resonance and destructive dynamic response of TBJF may occur, which should be avoided in engineering practice.
Author Contributions
Funding
Conflicts of Interest
References
- Willis, D.J.; Niezrecki, C.; Kuchma, D.; Hines, E.; Arwade, S.R.; Barthelmie, R.J.; DiPaola, M.; Drane, P.J.; Hansen, C.J.; Inalpolat, M.; et al. Wind energy research: State-of-the-art and future research directions. Renew. Energy 2018, 125, 133–154. [Google Scholar] [CrossRef]
- Chang, V.; Chen, Y.; Zhang, J.; Qianwen, A.X.; Baudier, P.; Liu, B.S.C. The market challenge of wind turbine industry-renewable energy in PR China and Germany. Technol. Forecast. Soc. Chang. 2021, 2021, 166. [Google Scholar] [CrossRef]
- Carswell, W.; Johansson, J.; Løvholt, F.; Arwade, S.R.; Madshus, C.; DeGroot, D.J.; Myers, A.T. Foundation damping and the dynamics of offshore wind turbine monopoles. Renew. Energy 2015, 80, 724–736. [Google Scholar] [CrossRef]
- Gasparatos, A.; Doll, C.N.H.; Esteban, M.; Ahmed, A.; Olang, T.A. Renewable energy and biodiversity: Implications for transitioning to a Green Economy. Renew. Sustain. Energy Rev. 2017, 70, 161–184. [Google Scholar] [CrossRef] [Green Version]
- Zaaijer, M.B. Foundation modelling to assess dynamic behavior of offshore wind turbines. Appl. Ocean Res. 2006, 28, 45–57. [Google Scholar] [CrossRef]
- Guo, Y.; Zhang, P.; Ding, H.; Le, C. Design and verification of the loading system and boundary conditions for wind turbine foundation model experiment. Renew. Energy 2021, 172, 16–33. [Google Scholar] [CrossRef]
- Lee, J.; Zhao, F. Global Wind Report 2021; GWEC: Brussels, Belgium, 2021. [Google Scholar]
- Wang, X.; Zeng, X.; Li, J.; Yang, X.; Wang, H. A review on recent advancements of substructures for offshore wind turbines. Energy Convers. Manag. 2018, 158, 103–119. [Google Scholar] [CrossRef]
- Mo, R.; Cao, R.; Liu, M.; Li, M.; Huang, Y. Seismic fragility analysis of monopile offshore wind turbines considering ground motion directionality. Ocean Eng. 2021, 235, 109414. [Google Scholar] [CrossRef]
- Lu, W.; Zhan, G.; Wang, A. Bearing behavior of multiple piles for offshore wind driven generator. Ocean Eng. 2017, 129, 538–548. [Google Scholar] [CrossRef]
- Zhang, H.; Liang, F.; Zheng, H. Dynamic impedance of monopiles for offshore wind turbines considering scour-hole dimensions. Appl. Ocean Res. 2021, 107, 102493. [Google Scholar] [CrossRef]
- He, R.; Wang, L. Elastic rocking vibration of an offshore Gravity Base Foundation. Appl. Ocean Res. 2016, 55, 48–58. [Google Scholar] [CrossRef]
- Wen, K.; Wu, X.; Zhu, B. Numerical investigation on the lateral loading behaviour of tetrapod piled jacket foundations in medium dense sand. Appl. Ocean Res. 2002, 100, 102198. [Google Scholar]
- Jiang, J.; Jian, J.; Dong, X.; Wang, H.; Zhou, H. Soil damping calculation of the offshore wind turbine supported by wide-shallow bucket foundation. Appl. Ocean Res. 2021, 111, 102682. [Google Scholar] [CrossRef]
- Ningxin, Y.; Zhou, M.; Tian, Y.; Zhang, X. Evaluation of capacities of bucket foundations in soft-stiff-soft clays under combined loading. Appl. Ocean Res. 2021, 115, 102843. [Google Scholar]
- Yan, Y.; Bashir, M.; Michailides, C.; Mei, X.; Wang, J.; Li, C. Coupled analysis of a 10 MW multi-body floating offshore wind turbine subjected to tendon failures. Renew. Energy 2021, 176, 89–105. [Google Scholar]
- Hegseth, J.M.; Bachynski, E.E.; Leira, B.J. Effect of environmental modelling and inspection strategy on the optimal design of floating wind turbines. Reliab. Eng. Syst. Safety 2021, 214, 107706. [Google Scholar] [CrossRef]
- Antoniou, M.; Gelagoti, F.; Anastasopoulos, I. A compliant guyed system for deep-sea installations of offshore wind turbines: Concept, design insights and dynamic performance. Soil Dyn. Earthq. Eng. 2019, 119, 235–252. [Google Scholar] [CrossRef]
- Lu, J.; Zhang, Y.; Ren, M. Grouting Technology of Gravity Base for Offshore Wind Power. Electr. Power Constr. 2012, 33, 95–98. [Google Scholar]
- Cao, C. Study on Design Methods of Monopile Supporting Structure and Foundation for Offshore Wind Energy Converters. Mech. Electr. Equip. 2018, 35, 39–50. [Google Scholar]
- He, Y.S.; Wang, J.F.; Zhao, H.Y.; Li, Z.L.; Xing, K.Y.; Yao, S.K.; He, Z.J. Research of load calculation and load combination for wind turbine generator system of beach-shallow sea. Build. Struct. 2012, 42, 412–418. [Google Scholar] [CrossRef]
- Natarajan, A.; Stolpe, M.; Wandji, W.N. Structural optimization based design of jacket type sub-structures for 10 MW offshore wind turbines. Ocean Eng. 2019, 172, 629–640. [Google Scholar] [CrossRef]
- Ku, C.-Y.; Chien, L.-K. Modeling of Load Bearing Characteristics of Jacket Foundation Piles for Offshore Wind Turbines in Taiwan. Energies 2016, 9, 625. [Google Scholar] [CrossRef]
- Ding, H.; Peng, Y.; Zhang, P.; Zhai, H.; Jia, N. Model Tests on the Penetration Resistance of Bucket Foundations for Offshore Wind Turbines in Sand. Mar. Sci. Technol. 2020, 8, 368. [Google Scholar] [CrossRef]
- Jiang, X. Analysis on Bearing Capacity of Wide and Shallow Bucket Foundation in Silty Clay; Tianjin University: Tianjin, China, 2016. [Google Scholar]
- Ehrmann, A.; Penner, N.; Gebhardt, C.G.; Rolfes, R. Offshore Support Structures with Suction Buckets: Parameter Fitting of a Simplified Foundation Model. In Proceedings of the International Ocean and Polar Engineering Conference, ISOPE, Rhodes, Greece, 26 June–1 July 2016. [Google Scholar]
- Guo, J. Offshore Installation of the First Suction Tube Jacket Fan Foundation in China. Available online: https://tech.sina.com.cn/roll/2020-08-10/doc-iivhvpwy0173652.shtml (accessed on 10 August 2020).
- DONG Energy. Suction Bucket Jacket Foundation Installed at Borkum Riffgrund 1 (Gallery). Available online: https://www.offshorewind.biz/2014/08/28/suction-bucket-jacket-foundation-installed-at-borkum-riffgrund-1-gallery/ (accessed on 15 March 2021).
- SPT Offshore. AOWF Suction Bucket Tests Jackets. Available online: https://www.sptoffshore.com/projects/aowf-suction-bucket-tests-jackets-with-suction-pile-foundations/ (accessed on 21 March 2021).
- Achmus, M.; Schroeder, C. Installation and bearing behaviour of bucket foundations for offshore structures. Bautechnik 2014, 91, 597–608. [Google Scholar] [CrossRef]
- Kishimoto, T.; Kijima, K. The manoeuvring characteristics on tug-towed sip systems. In Proceedings of the Control Applications in Marine Systems, Glasgow, Scotland, UK, 18–20 July 2001. [Google Scholar]
- Park, S.H.; Lee, S.J.; Lee, S. Experimental investigation of towing- and course-stability of a FPSO towed by a tug-boat with lateral motion. Int. J. Nav. Archit. Ocean Eng. 2021, 13, 12–13. [Google Scholar] [CrossRef]
- Zeng, G.; Zhu, J.; Shao, Y.; Wen, J. The nonlinear dynamics model of towed cable-ship and numerically simulation. J. Nav. Univ. Eng. 2006, 18, 96–101. [Google Scholar]
- Charters, S.; Thomas, L.; Latorre, R. Analysis of towed vessel course stability in shallow water. Marit. Tech. Inf. Facility 1986, 128, 12–16. [Google Scholar]
- Varyani, K. Course Stability Problem Formulation. In Proceedings of the Gdansk Poland: 13th International Conference on Hydrodynamic in Ship Design (HYDRONAV 99), 2nd International Symposiums on Ship Manoeuvring(MANOEUVRING 99), Ostróda, Poland, 22–24 September 1999. [Google Scholar]
- Van Kessel, J.L.F. Aircushion Supported Mega-Floaters; Wöhrmann Print Service: Zutphen, The Netherlands, 2010; pp. 110–154. [Google Scholar]
- Chenu, B.; Morris, T.; Thiagarajan, K.P. Some hydrodynamic characteristics of an air-cushion supported concrete gravity structure. In Proceedings of the 15th Australasian Fluid Mechanics Conference, Sydney, Australia, 13–17 December 2004. [Google Scholar]
- Ikoma, T.; Masuda, K.; Maeda, H. Hydroelastic Behavior of Air-Supported Flexible Floating Structures. In Proceedings of the 21st International Conference on OMAE’02, Oslo, Norway, 23–28 June 2002. [Google Scholar]
- Ohkusu, M. Wave effects on multiple bodies. Hydrodyn. Ship Ocean Eng. 2001, 3, 3–26. [Google Scholar]
- Wind Turbines—Part I: Design Basis and Qualification Process. In Proceedings of the ASME 2009 28th International Conference on Ocean, Offshore and Arctic Engineering, American Society of Mechanical Engineers. Honolulu, HI, USA, May 2009; pp. 845–853.
- Roddier, D.; Cermelli, C.; Aubault, A.; Weinstein, A. WindFloat: A floating foundation for offshore wind turbines. J. Renew. Sustain. Energy 2010, 2, 3041–3045. [Google Scholar] [CrossRef]
- ELISA—Elican Project, World´S First Cranesless Bottom-Fixed Offshore Turbine. 5mw “Elisa” Prototype. Available online: https://www.esteyco.com/proyectos/elisa-elican-project/ (accessed on 5 February 2021).
- Yu, T.; Lian, J.; Shi, Z.; Wang, H. Experimental investigation of current-induced local scour around composite bucket foundation in silty sand. Ocean Eng. 2016, 117, 311–320. [Google Scholar] [CrossRef]
- Liu, M.; Lian, J.; Yang, M. Experimental and numerical studies on lateral bearing capacity of bucket foundation in saturated sand. Ocean Eng. 2017, 144, 14–20. [Google Scholar] [CrossRef]
- Jia, N.; Zhang, P.; Liu, P.; Ding, H. Bearing capacity of composite bucket foundations for offshore wind turbines in silty sand. Ocean Eng. 2019, 12, 2487. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, P.; Ding, H.; Liu, R. Experimental study of the accumulative deformation effect on wide-shallow composite bucket foundation for offshore wind turbines. J. Renew. Sustain. Energy 2017, 9, 063306. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Symbol | Ratio | Items | Symbol | Ratio |
|---|---|---|---|---|---|
| Line scale | Ls/Lm | λ | Period, speed | Ts/Tm, Vs/Vm | λ0.5 |
| Area | As/Am | λ2 | Frequency | fs/fm | λ0.5 |
| Volume | Vs/Vm | λ3 | Mass | ∆s/∆m | γλ3 |
| Linear acceleration | as/am | 1 | Force | Fs/Fm | γλ3 |
| Angle | θs/θm | 1 | Moment | Ms/Mm | γλ4 |
| Water density | ρs/ρm | γ | Moment of inertia | Is/Im | γλ5 |
| Diameter D/m | Skirt Length L/m | CoG Heights H/m | Self-Weight G/kg | |
|---|---|---|---|---|
| Prototype | 20 | 20 | 29.74 | |
| Model | 0.5 | 0.5 | 0.7426 | 48.43 |
| Condition | Draft Depth | Air Ratio | Water Ratio |
|---|---|---|---|
| 1 | 15 cm | 86.3% | 13.7% |
| 2 | 25 cm | 66.3% | 33.7% |
| 3 | 35 cm | 46.3% | 53.7% |
| Draft Depth | 15 cm | 25 cm | 35 cm |
|---|---|---|---|
| Natural frequency of heave (Hz) | 1.02 | 0.85 | 0.7 |
| Natural period of heave (s) | 0.98 | 1.18 | 1.4 |
| Draft Depth | 15 cm | 25 cm | 35 cm |
|---|---|---|---|
| Natural frequency of heave (Hz) | 0.64 | 0.6 | 0.56 |
| Natural period of heave (s) | 1.56 | 1.67 | 1.78 |
| Items | Condition 1 | Condition 2 | Condition 3 |
|---|---|---|---|
| Wave height (H/cm) | 2.5 | 2.5 | 2.5 |
| Wave period (T/s) | 1.34 | 1.34 | 1.34 |
| Towing speed (V/knots) | 0.41 | 0.41 | 0.41 |
| Draft depth (h1/m) | 0.15 | 0.25 | 0.35 |
| Towing position (ht/m) | 0.05 | 0.05 | 0.05 |
| Items | Condition 1 | Condition 2 | Condition 3 |
|---|---|---|---|
| Wave height (H/cm) | 2.5 | 2.5 | 2.5 |
| Wave period (T/s) | 1.34 | 1.34 | 1.34 |
| Towing speed (V/knots) | 0.41 | 0.41 | 0.41 |
| Draft depth (h1/m) | 0.15 | 0.15 | 0.15 |
| Towing position (ht/m) | 0.05 | 0.15 | 0.25 |
| Items | Condition 1 | Condition 2 | Condition 3 |
|---|---|---|---|
| Towing speed (V/knots) | 0.41 | 0.41 | 0.41 |
| Draft depth (h1/m) | 0.15 | 0.25 | 0.35 |
| Towing position (ht/m) | 0.05 | 0.05 | 0.05 |
| Items | Condition 1 | Condition 2 | Condition 3 |
|---|---|---|---|
| Wave height (H/cm) | 2.5 | 3.75 | 5 |
| Wave period (T/s) | 1.34 | 1.34 | 1.34 |
| Towing speed (V/knots) | 0.41 | 0.41 | 0.41 |
| Draft depth (h1/m) | 0.25 | 0.25 | 0.25 |
| Items | Condition 1 | Condition 2 | Condition 3 |
|---|---|---|---|
| Wave height (H/cm) | 2.5 | 2.5 | 2.5 |
| Wave period (T/s) | 1.34 | 1.50 | 1.66 |
| Towing speed (V/knots) | 0.41 | 0.41 | 0.41 |
| Draft depth (h1/m) | 0.25 | 0.25 | 0.25 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, C.; Wang, H.; Guo, Y.; Wang, Z.; Liu, X. Laboratory Study of Integrated Wet-Towing of a Triple-Bucket Jacket Foundation for Far-Offshore Applications. J. Mar. Sci. Eng. 2021, 9, 1152. https://doi.org/10.3390/jmse9111152
Yan C, Wang H, Guo Y, Wang Z, Liu X. Laboratory Study of Integrated Wet-Towing of a Triple-Bucket Jacket Foundation for Far-Offshore Applications. Journal of Marine Science and Engineering. 2021; 9(11):1152. https://doi.org/10.3390/jmse9111152
Chicago/Turabian StyleYan, Chaojun, Haijun Wang, Yaohua Guo, Zhen Wang, and Xiao Liu. 2021. "Laboratory Study of Integrated Wet-Towing of a Triple-Bucket Jacket Foundation for Far-Offshore Applications" Journal of Marine Science and Engineering 9, no. 11: 1152. https://doi.org/10.3390/jmse9111152
APA StyleYan, C., Wang, H., Guo, Y., Wang, Z., & Liu, X. (2021). Laboratory Study of Integrated Wet-Towing of a Triple-Bucket Jacket Foundation for Far-Offshore Applications. Journal of Marine Science and Engineering, 9(11), 1152. https://doi.org/10.3390/jmse9111152