Motion of Floating Caisson with Extended Bottom Slab under Regular and Irregular Waves

 , ,
, ,
Abstract
:1. Introduction
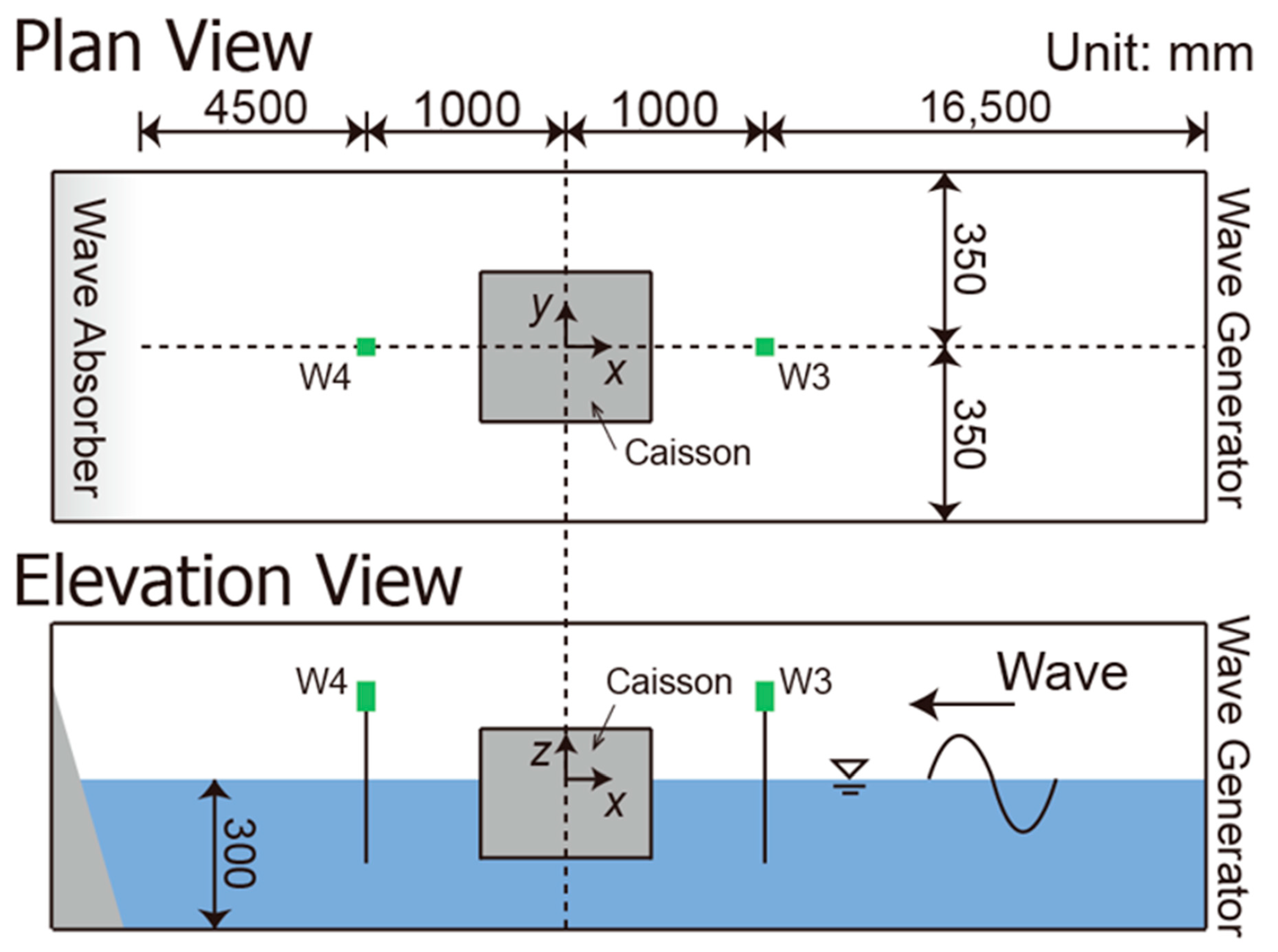
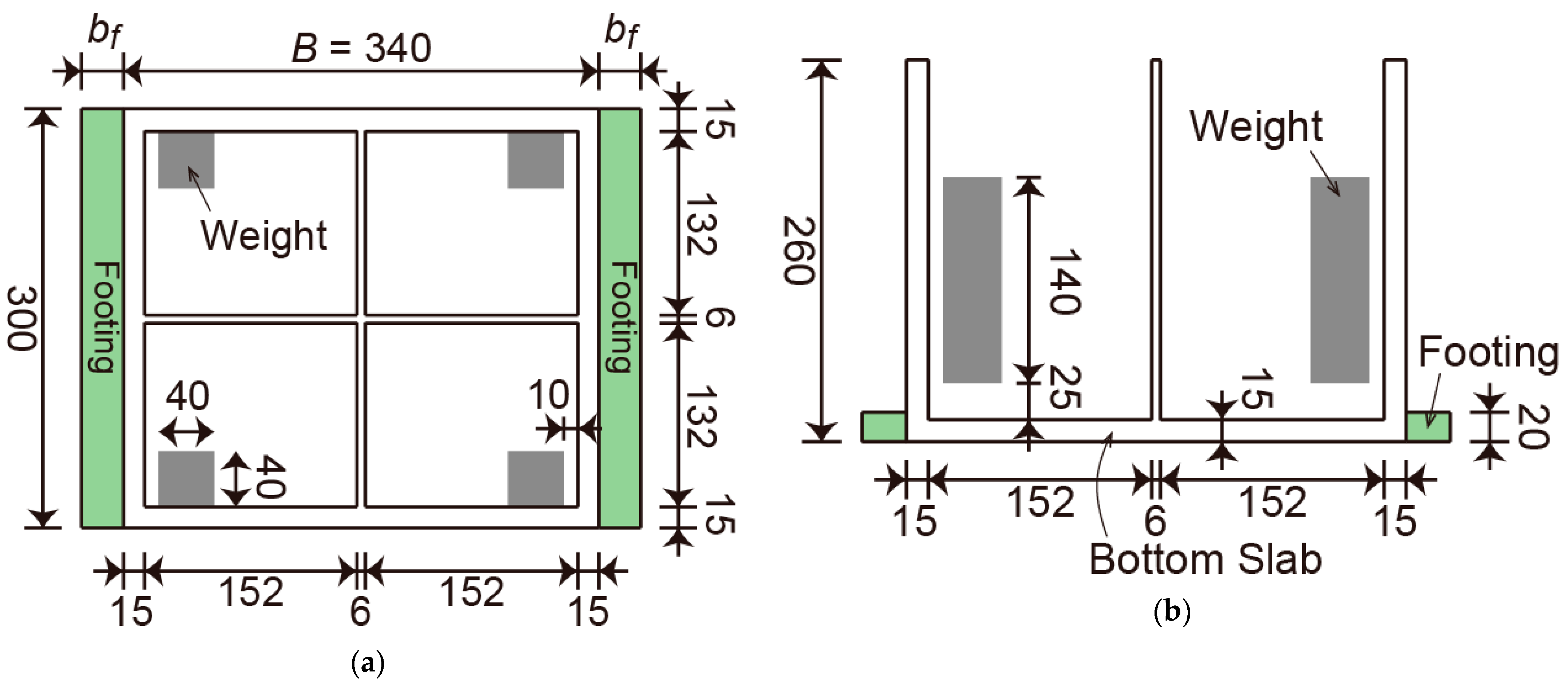
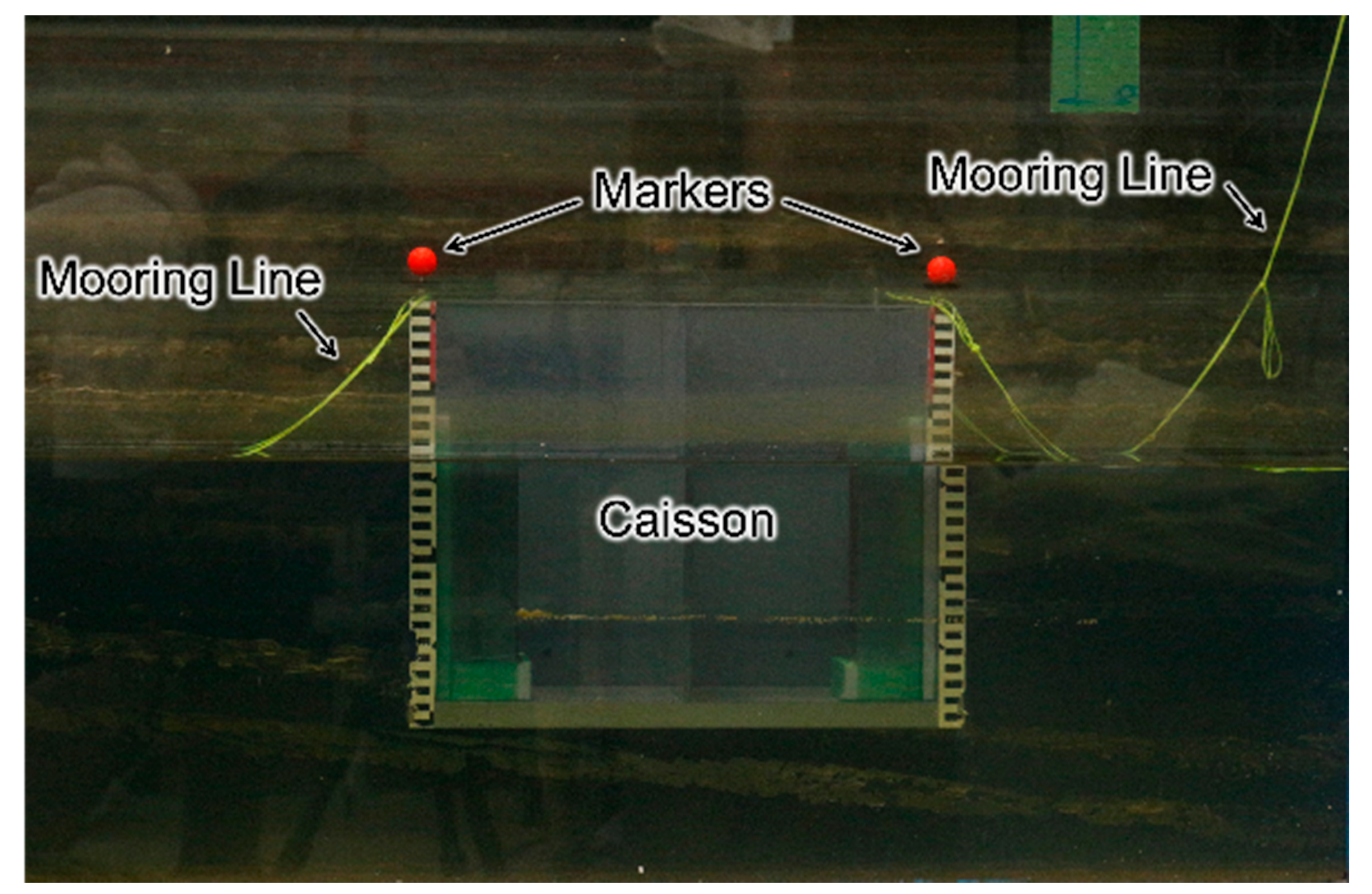
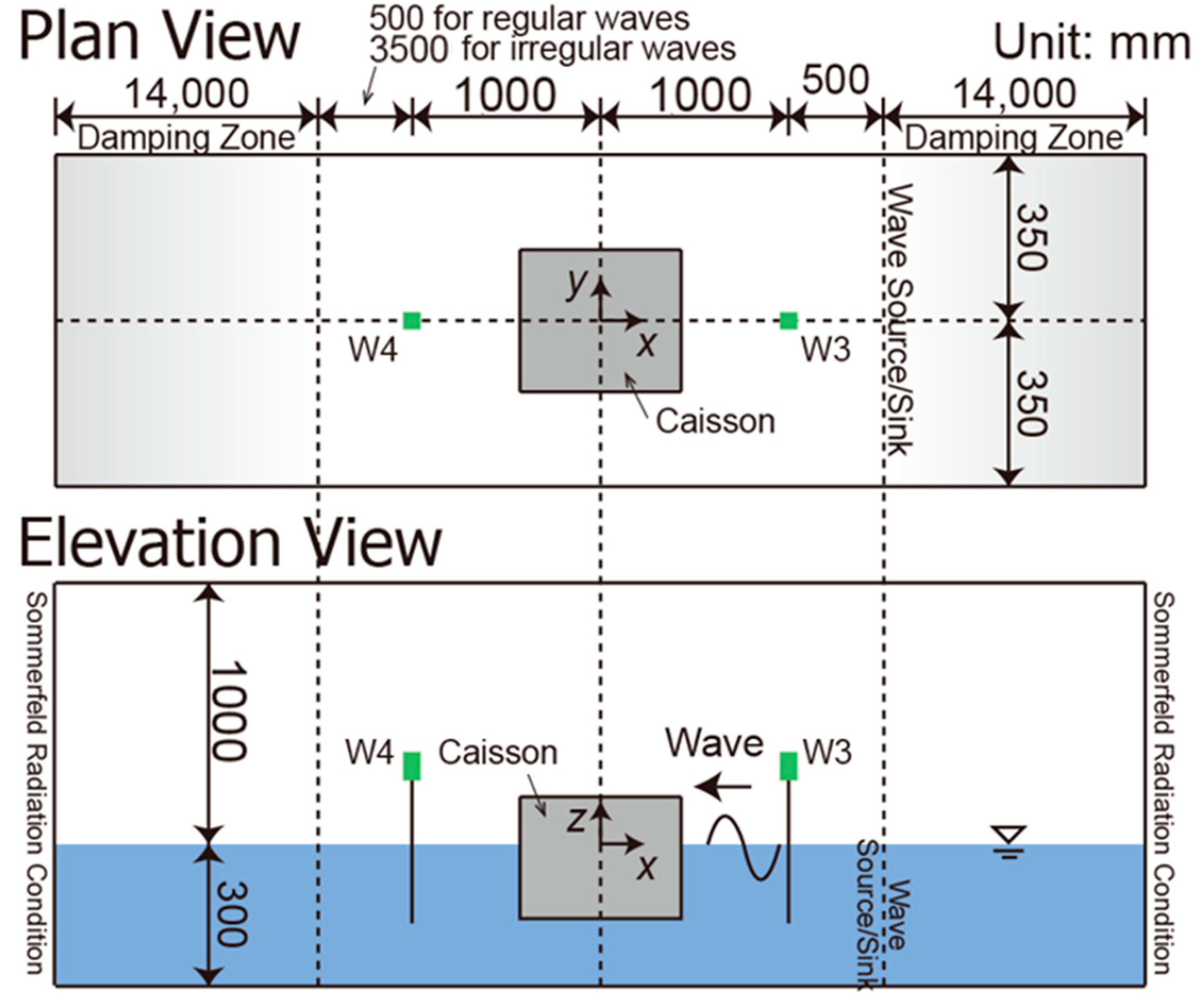
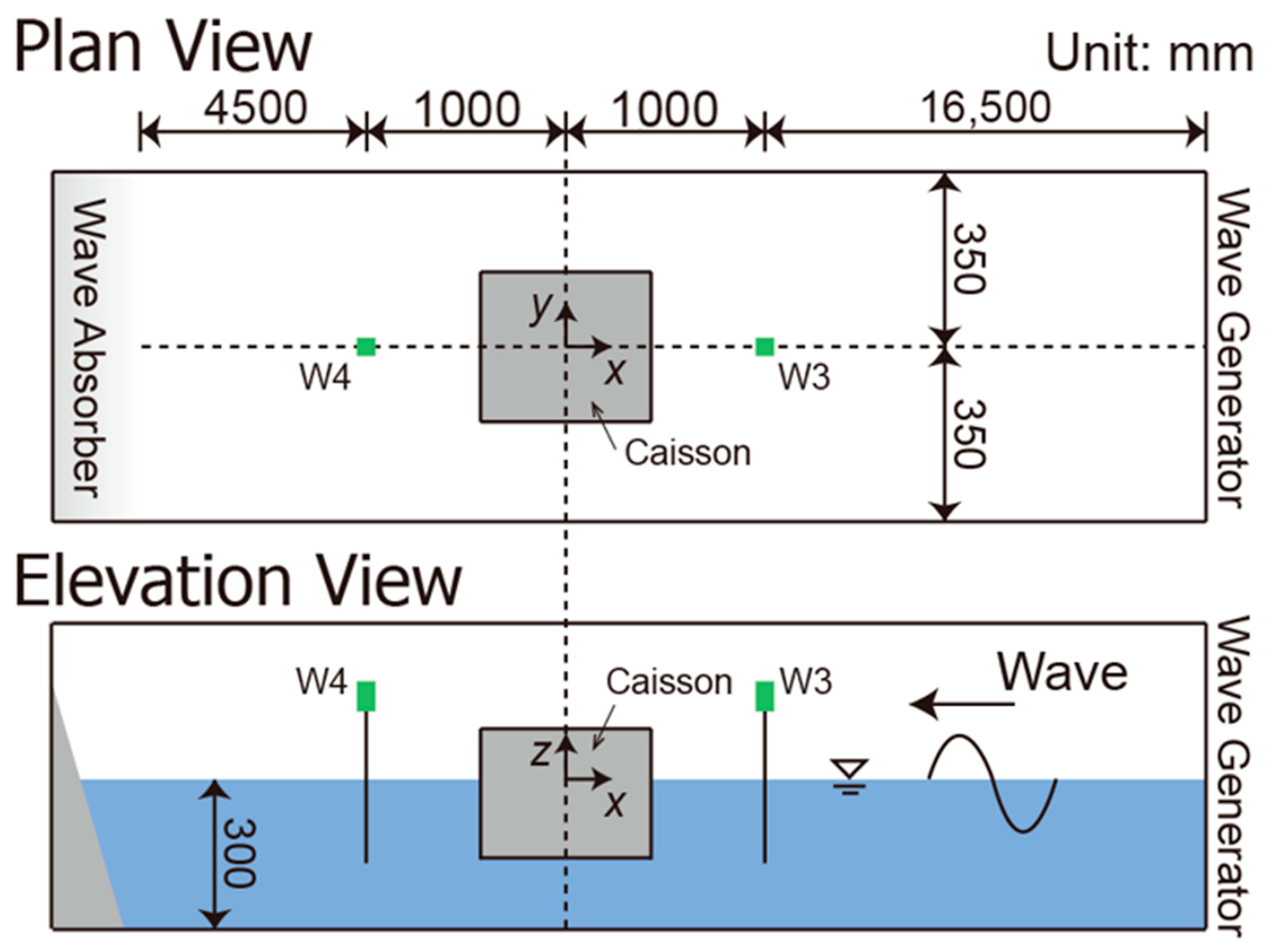
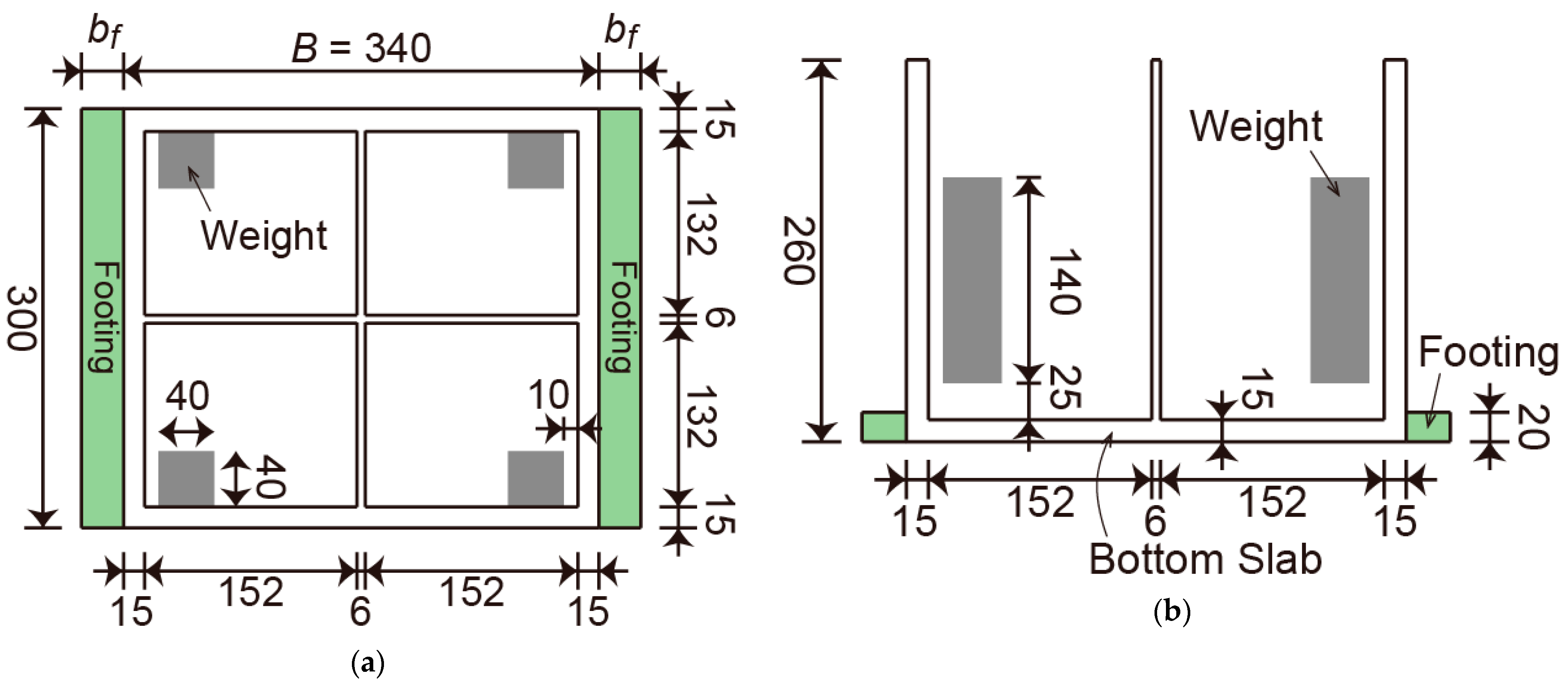
2. Experimental Setup and Conditions
3. Experimental Results and Discussion
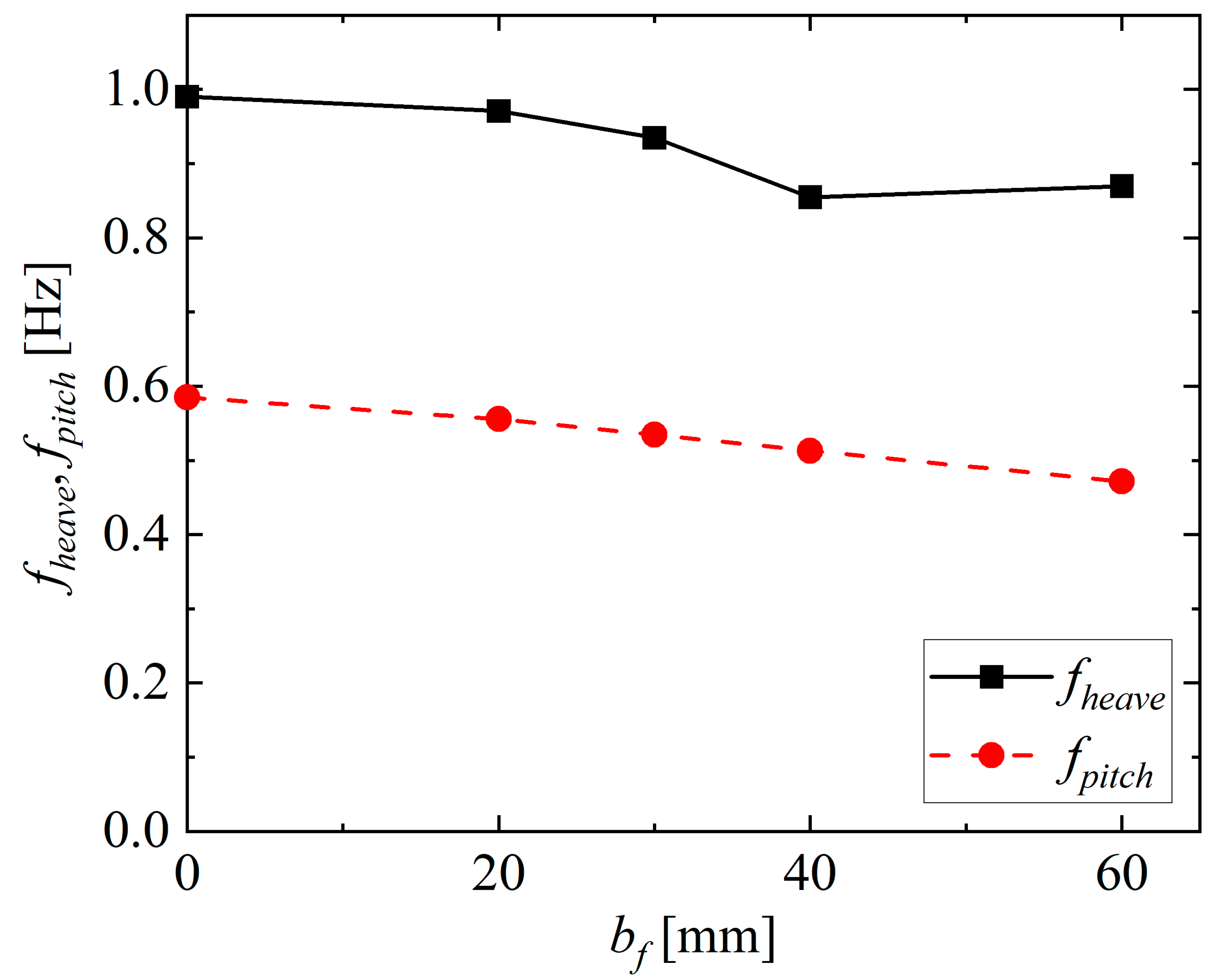
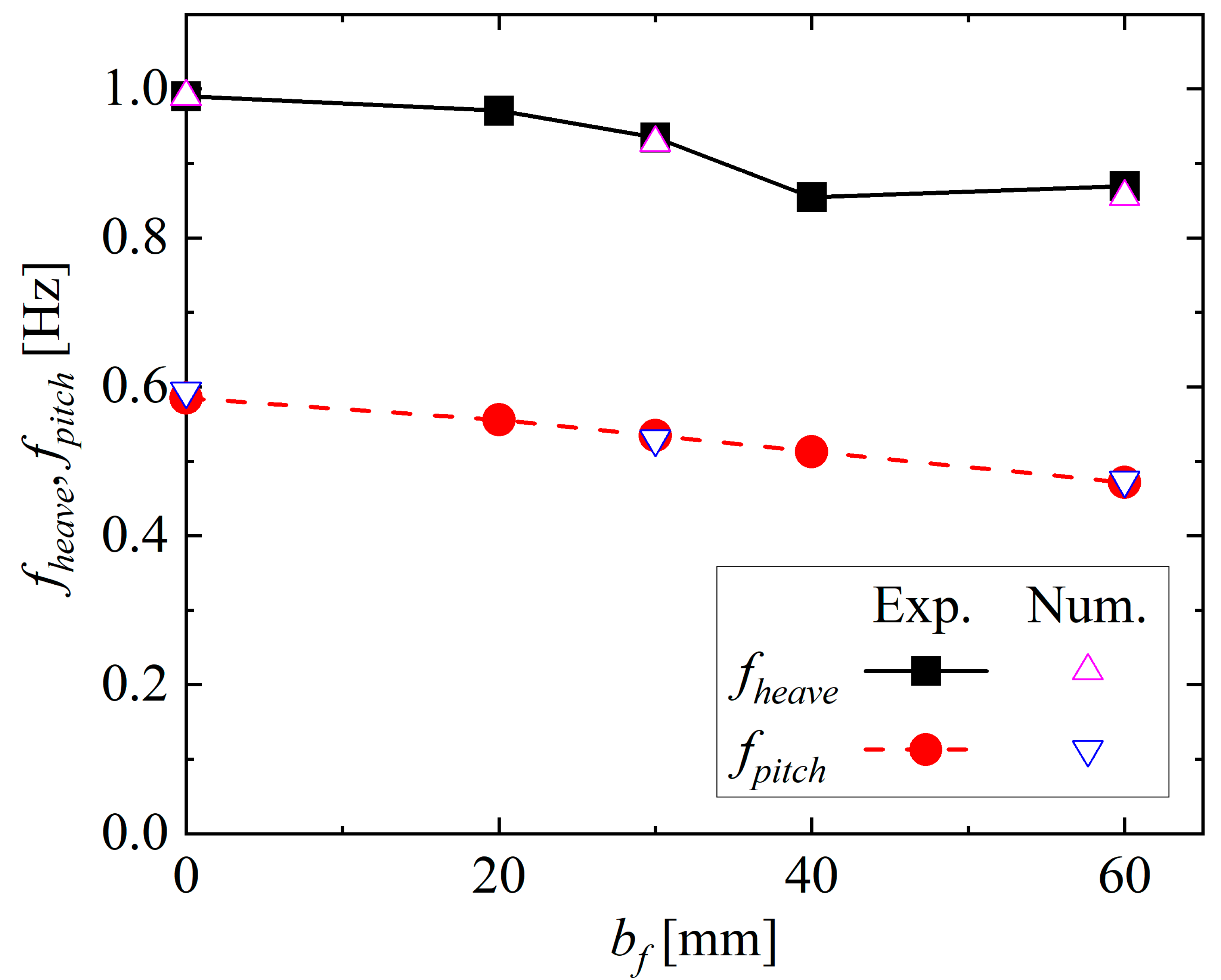
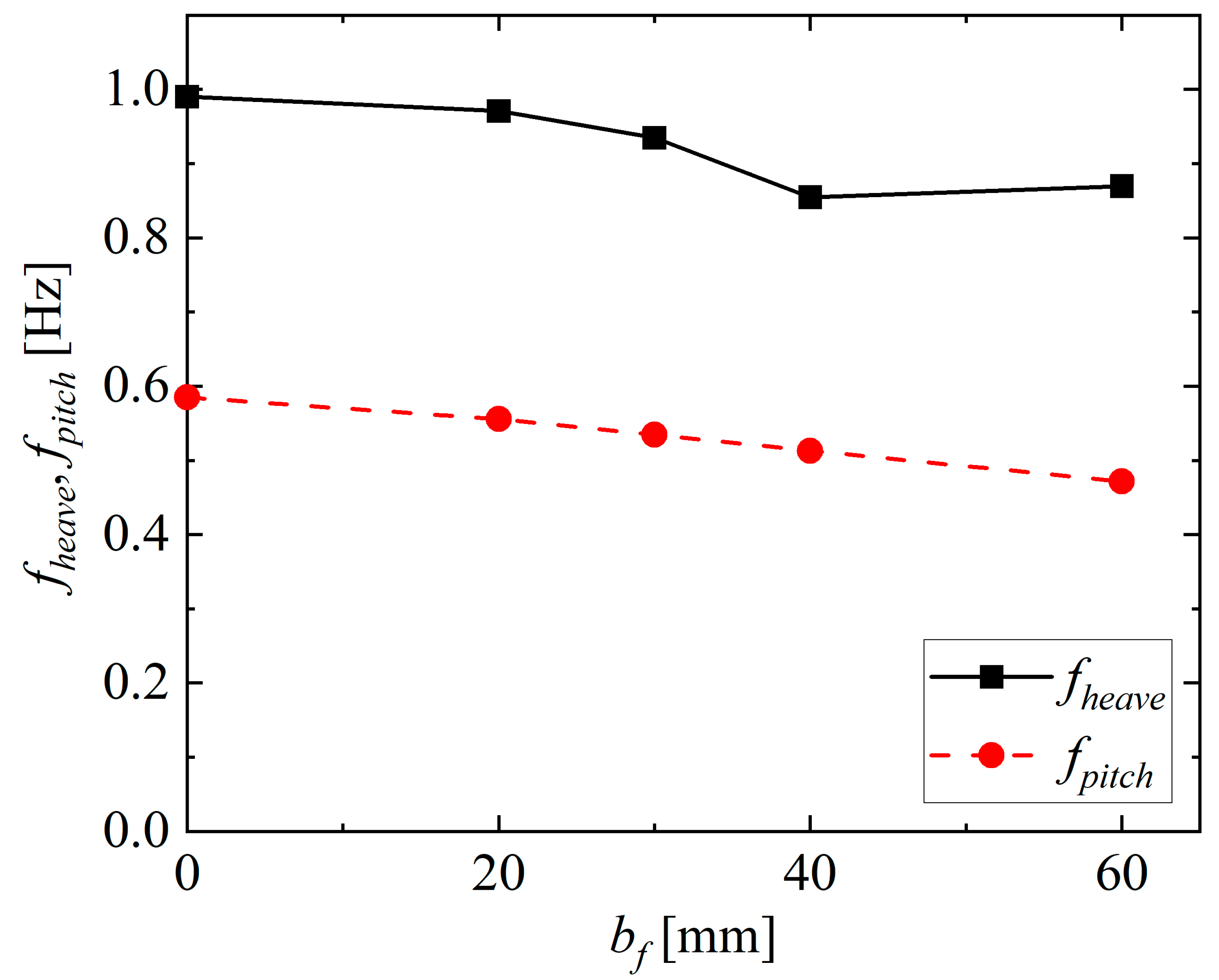
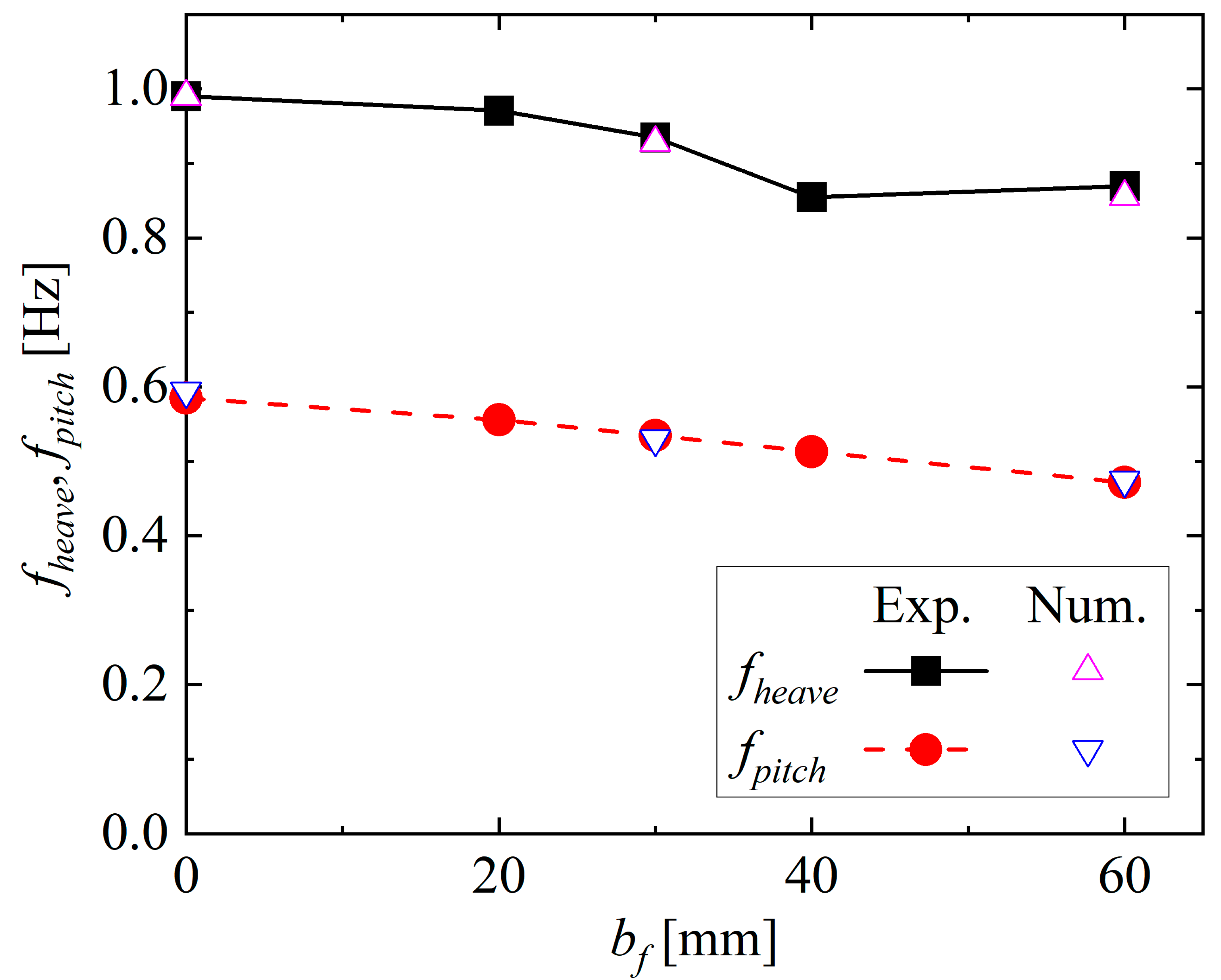
3.1. Natural Frequency
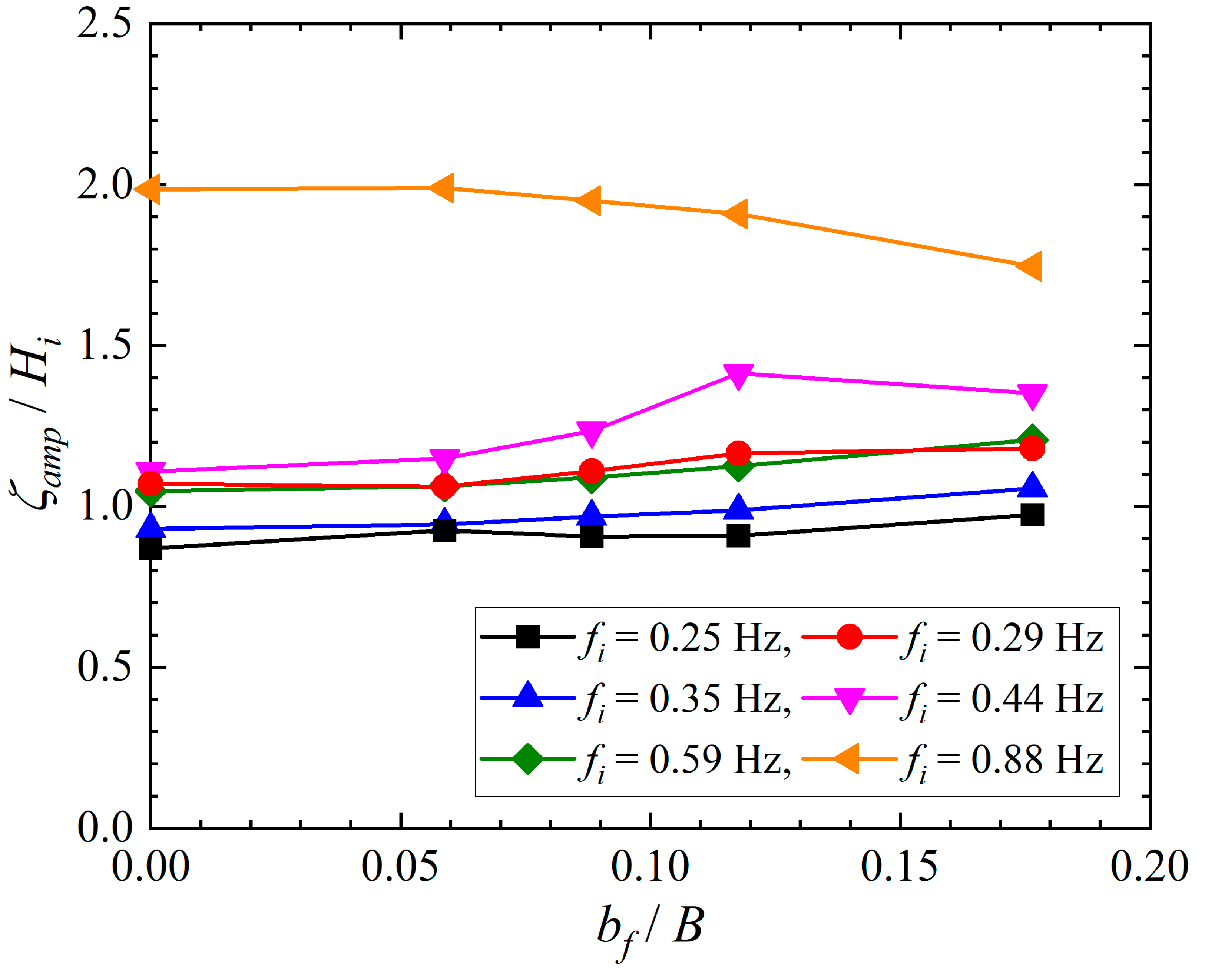
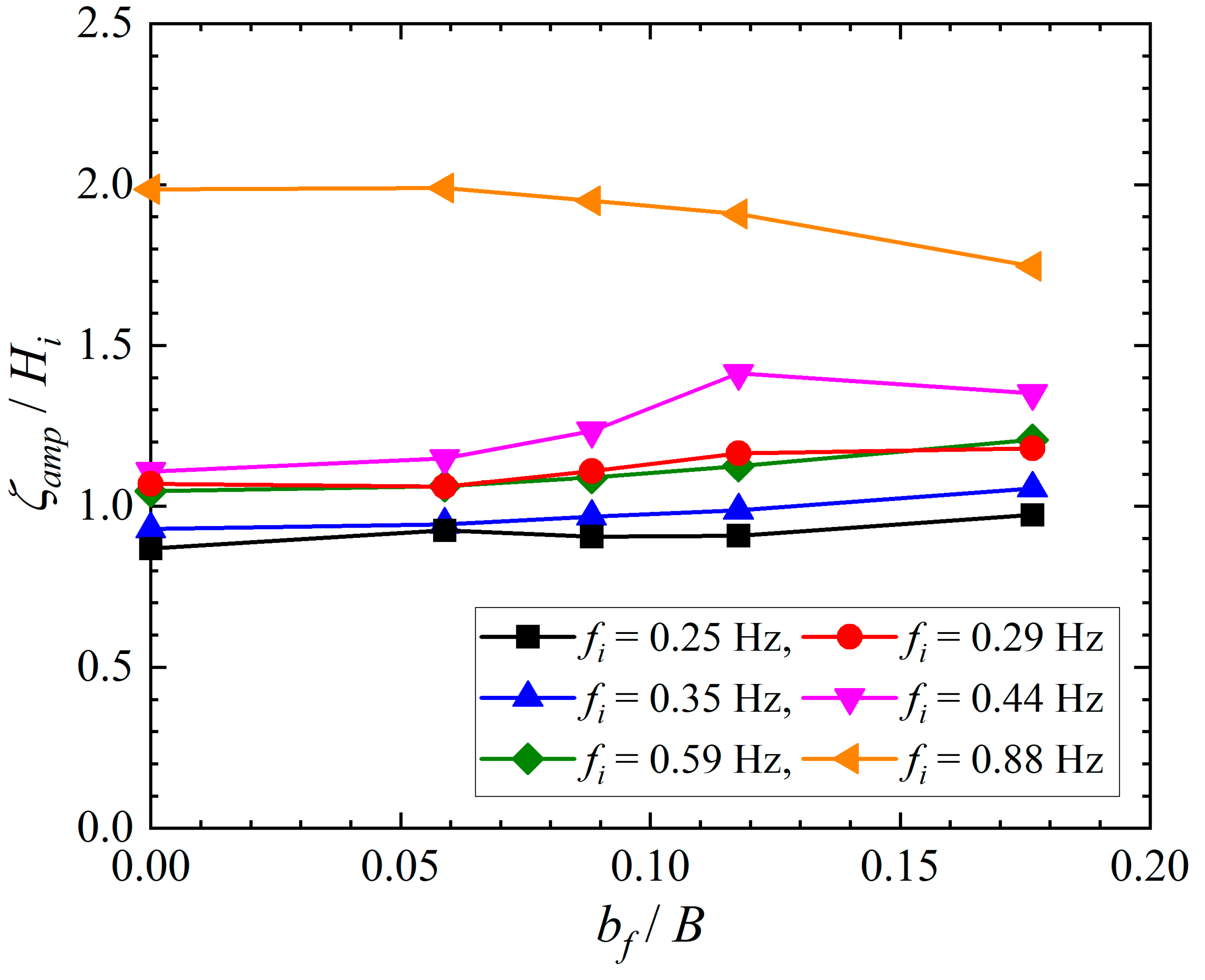
3.2. Total Amplitude of Heave
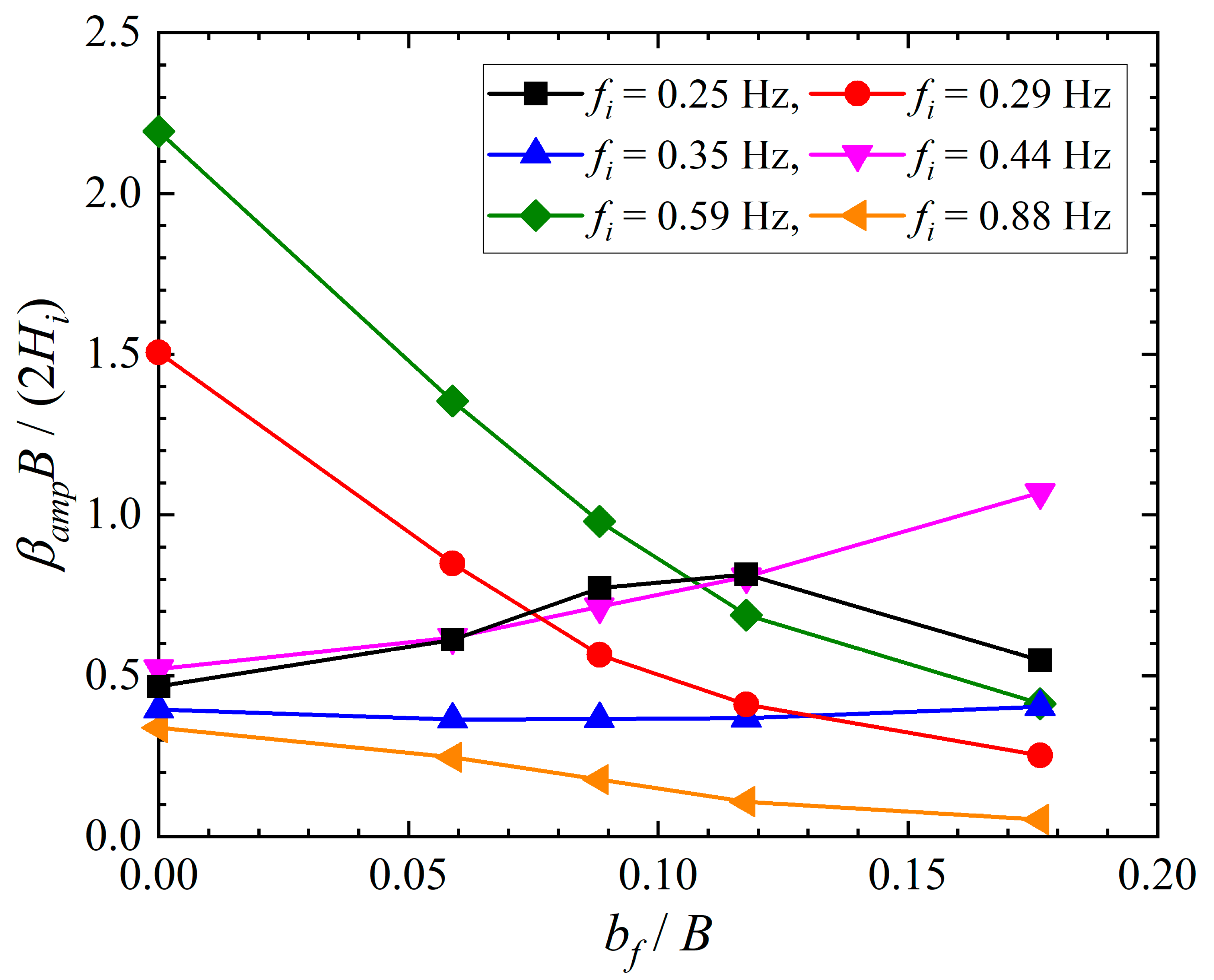
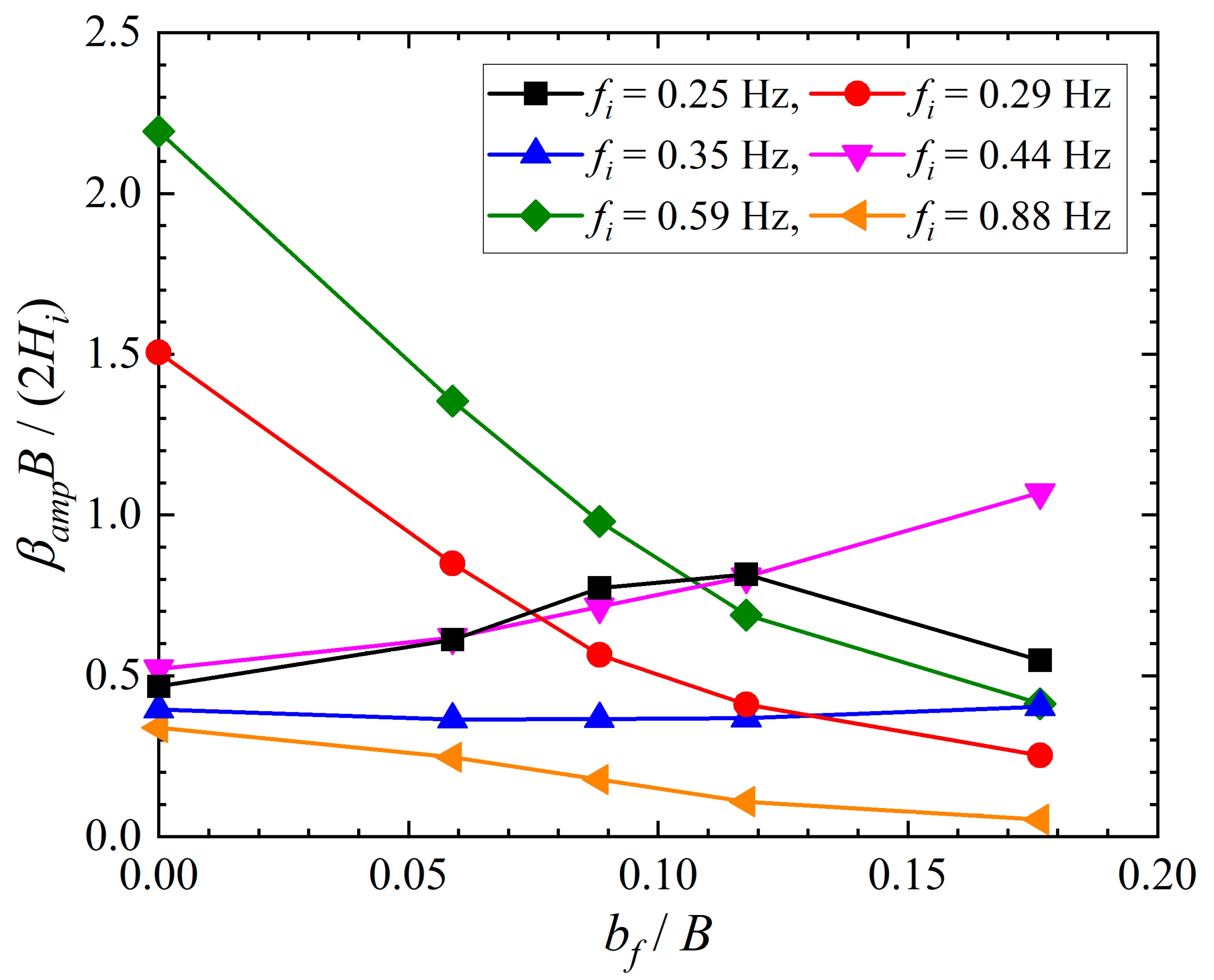
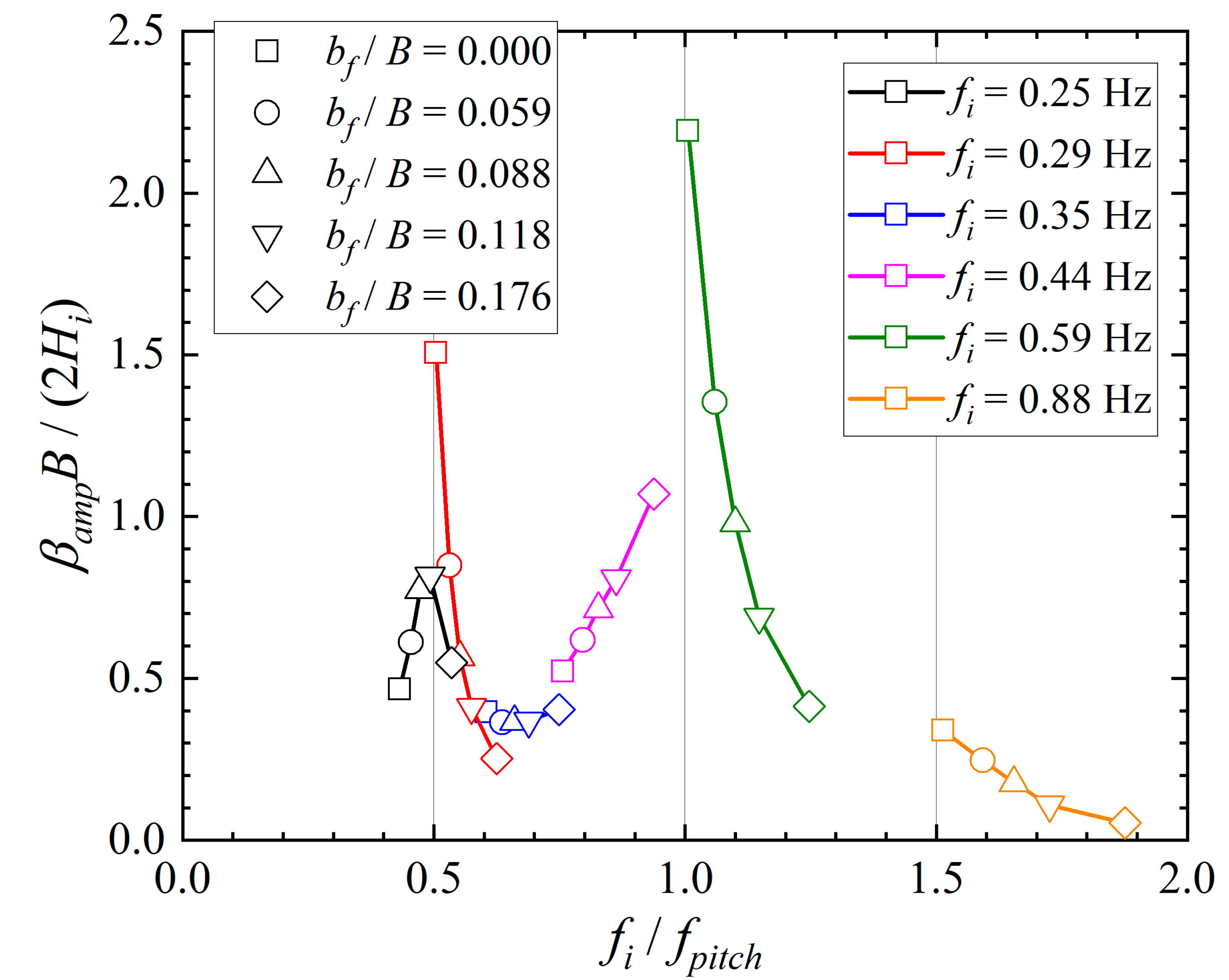
3.3. Total Amplitude of Pitch
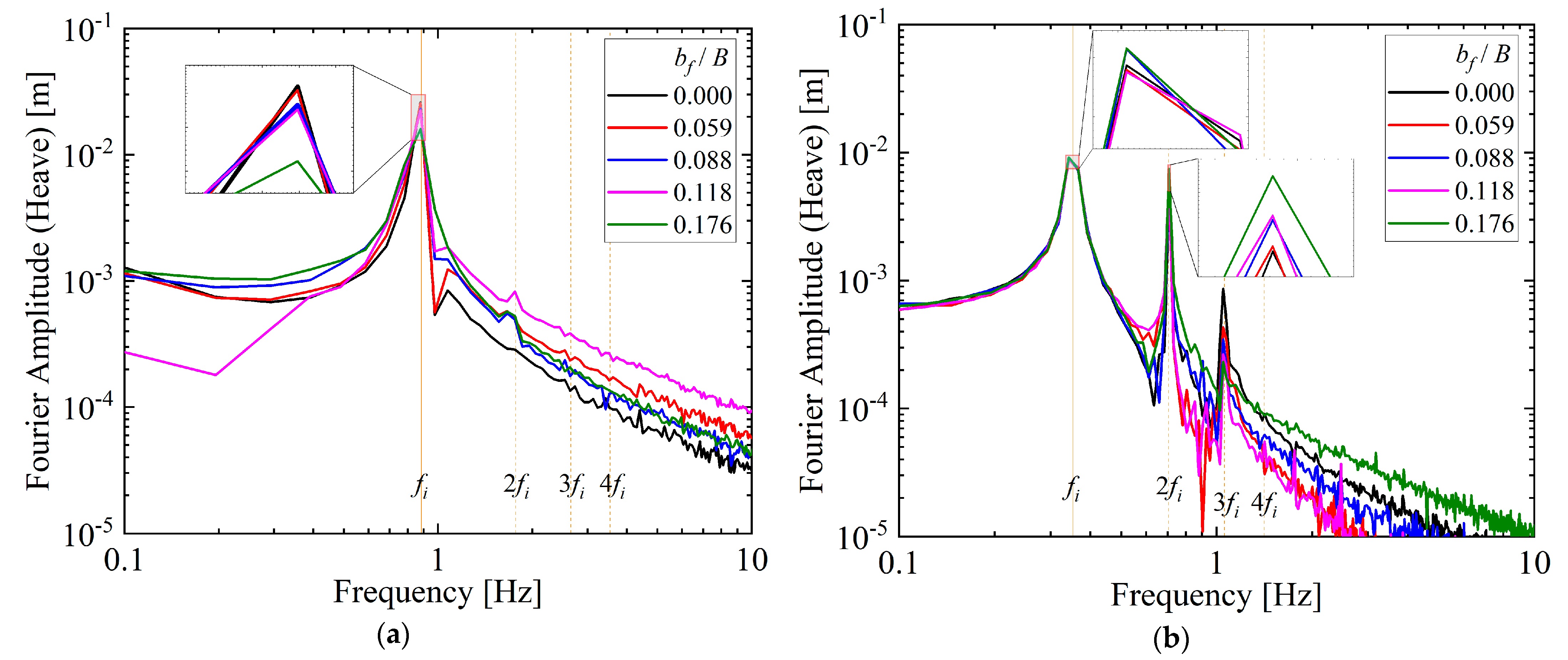
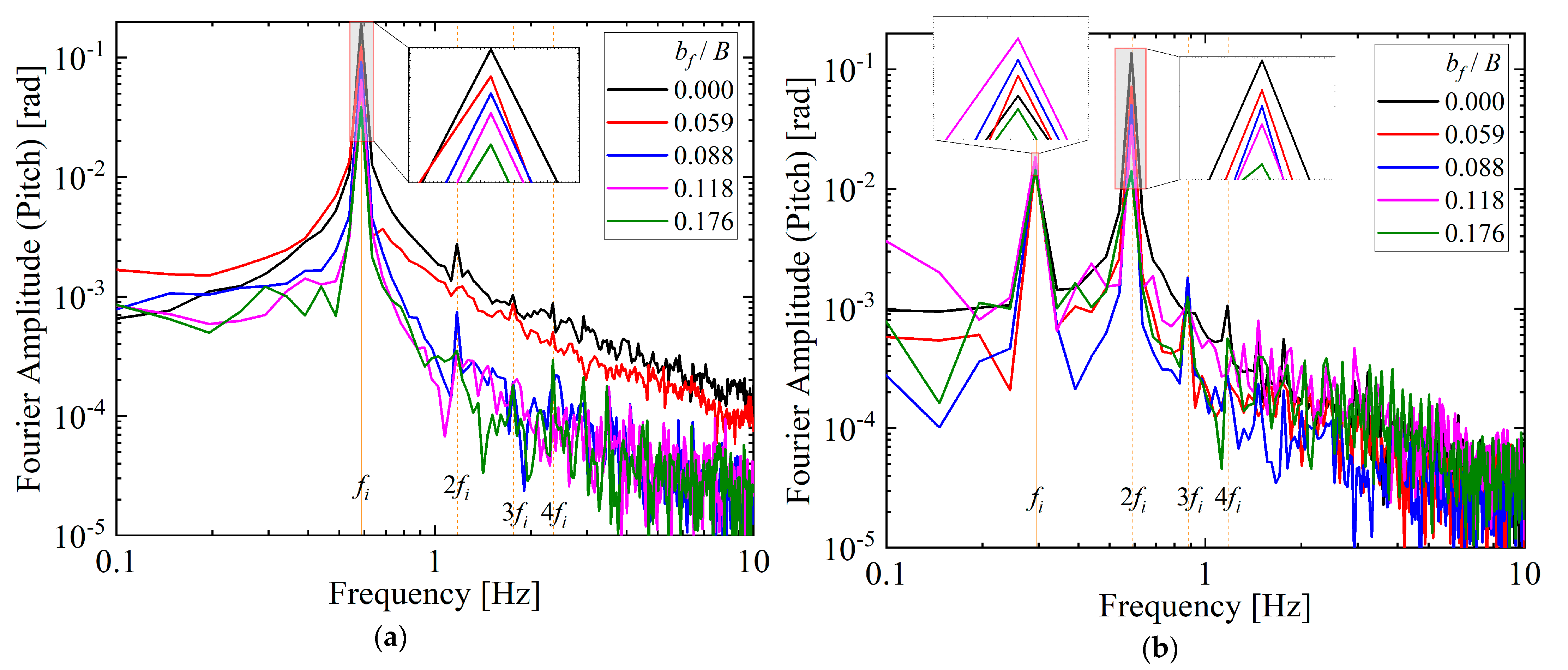
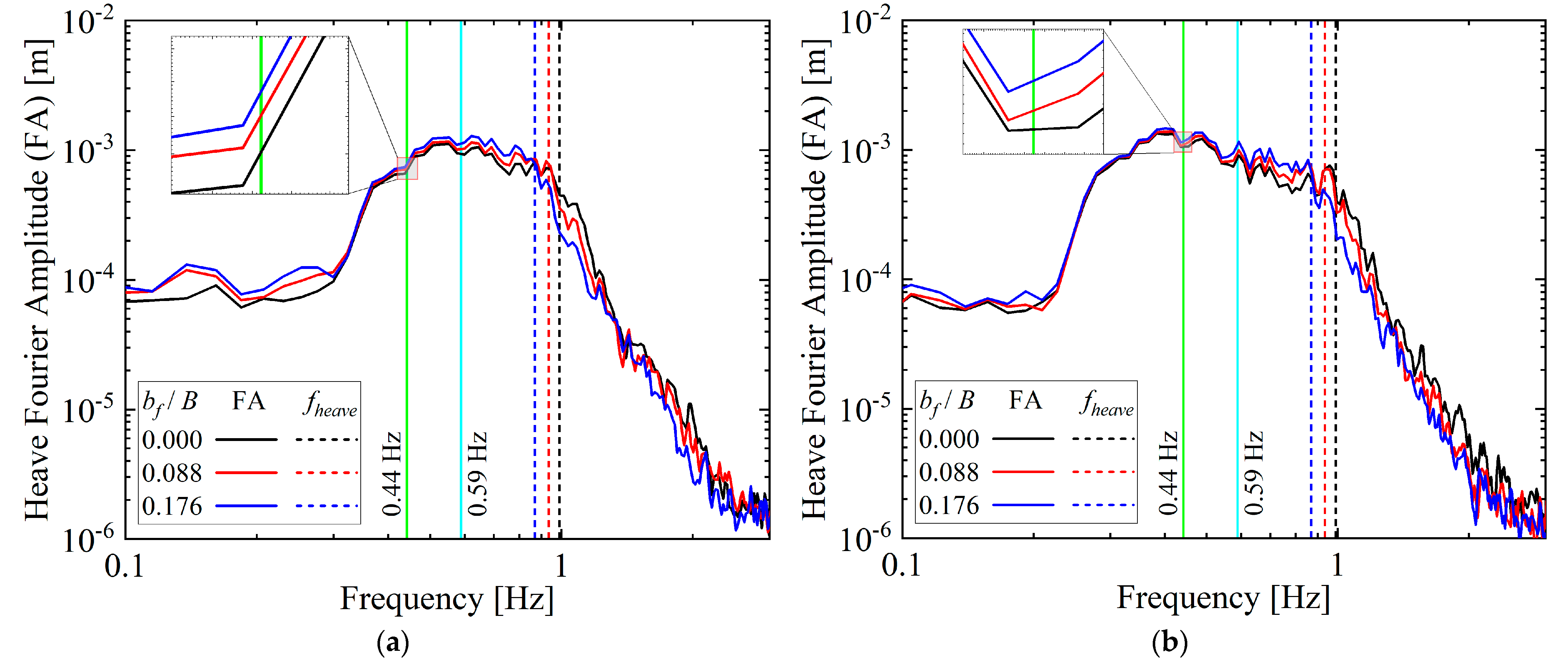
3.4. Fourier Amplitude of Heave and Pitch
4. Numerical Conditions
5. Numerical Results and Discussion
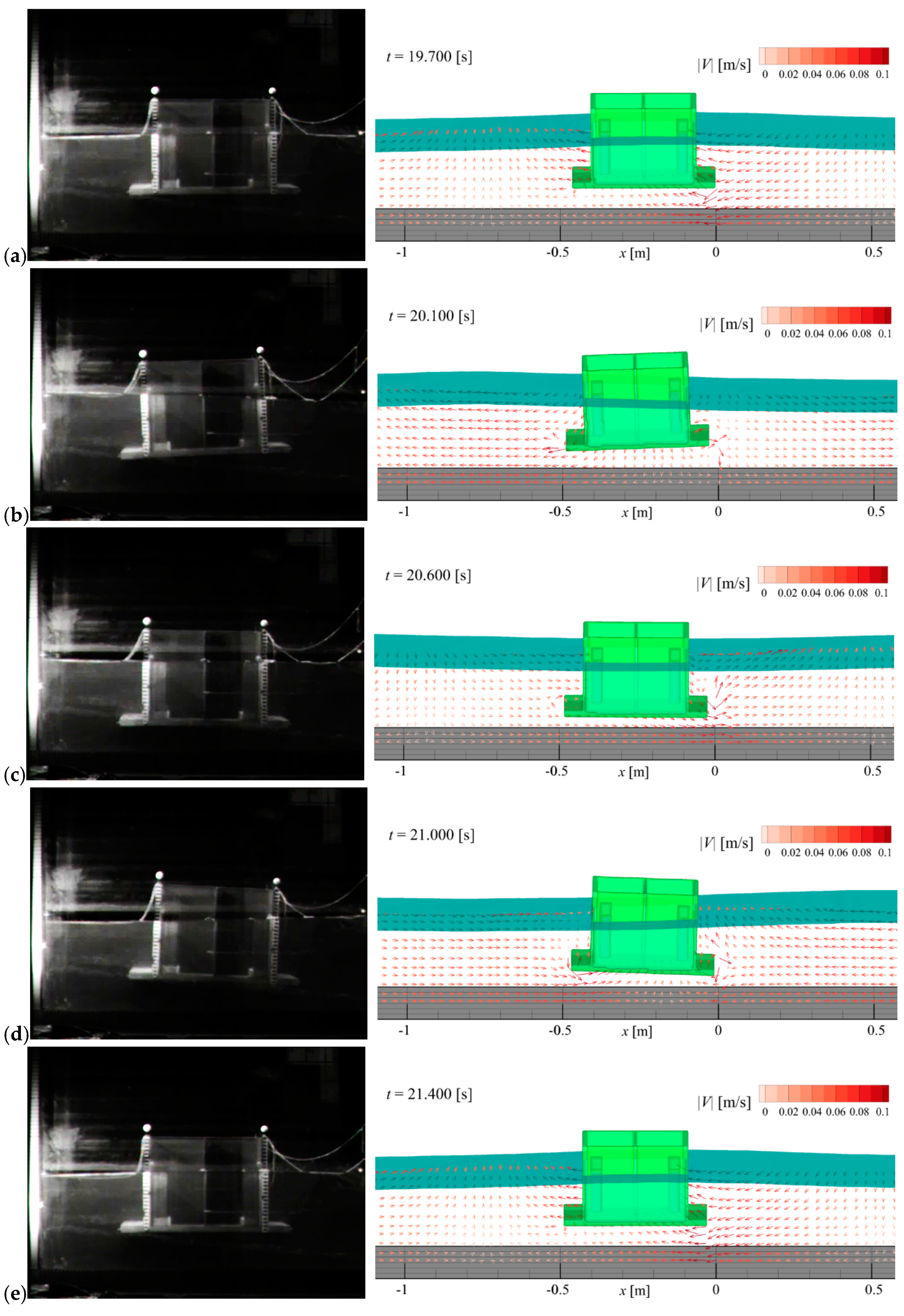
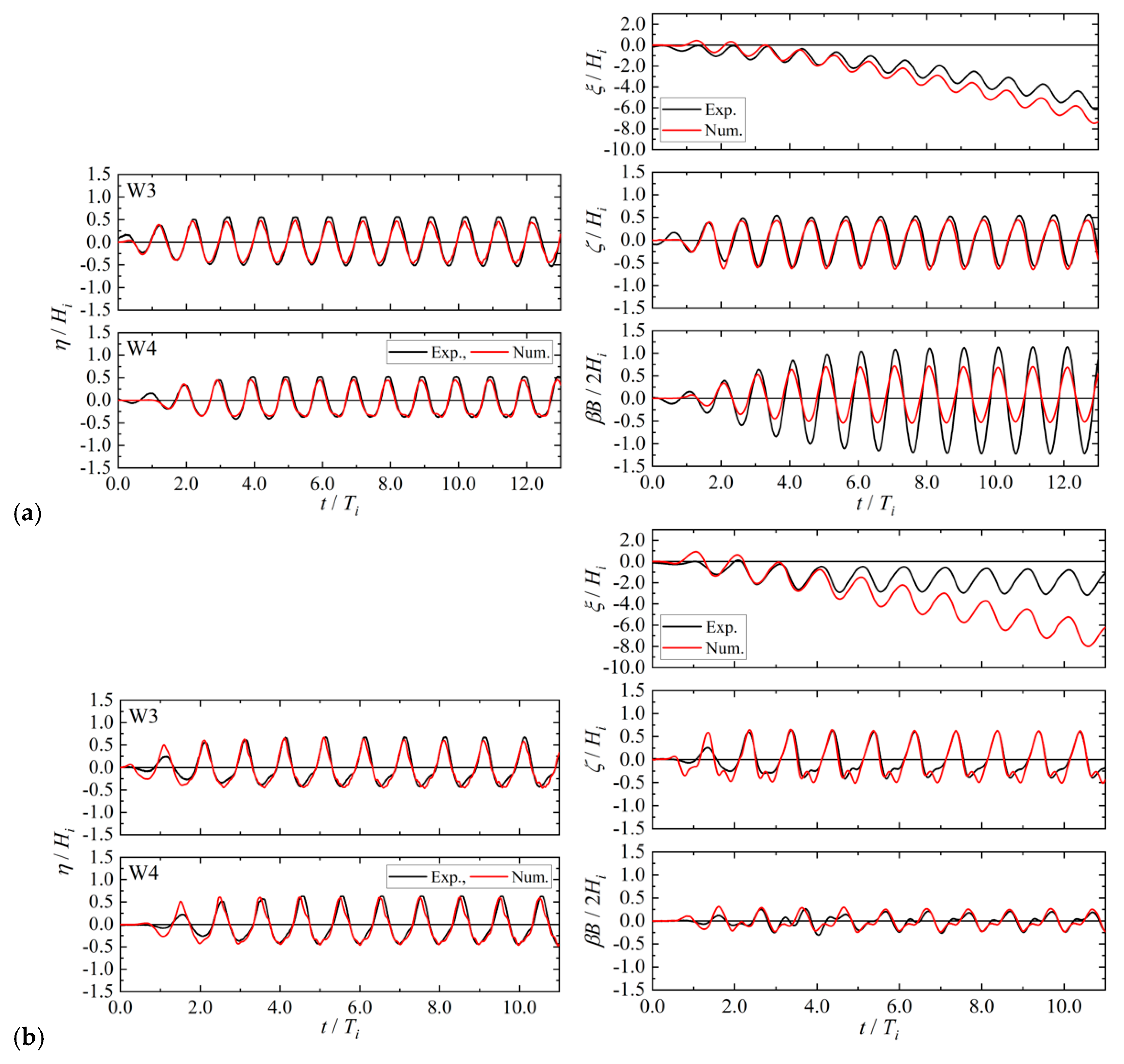
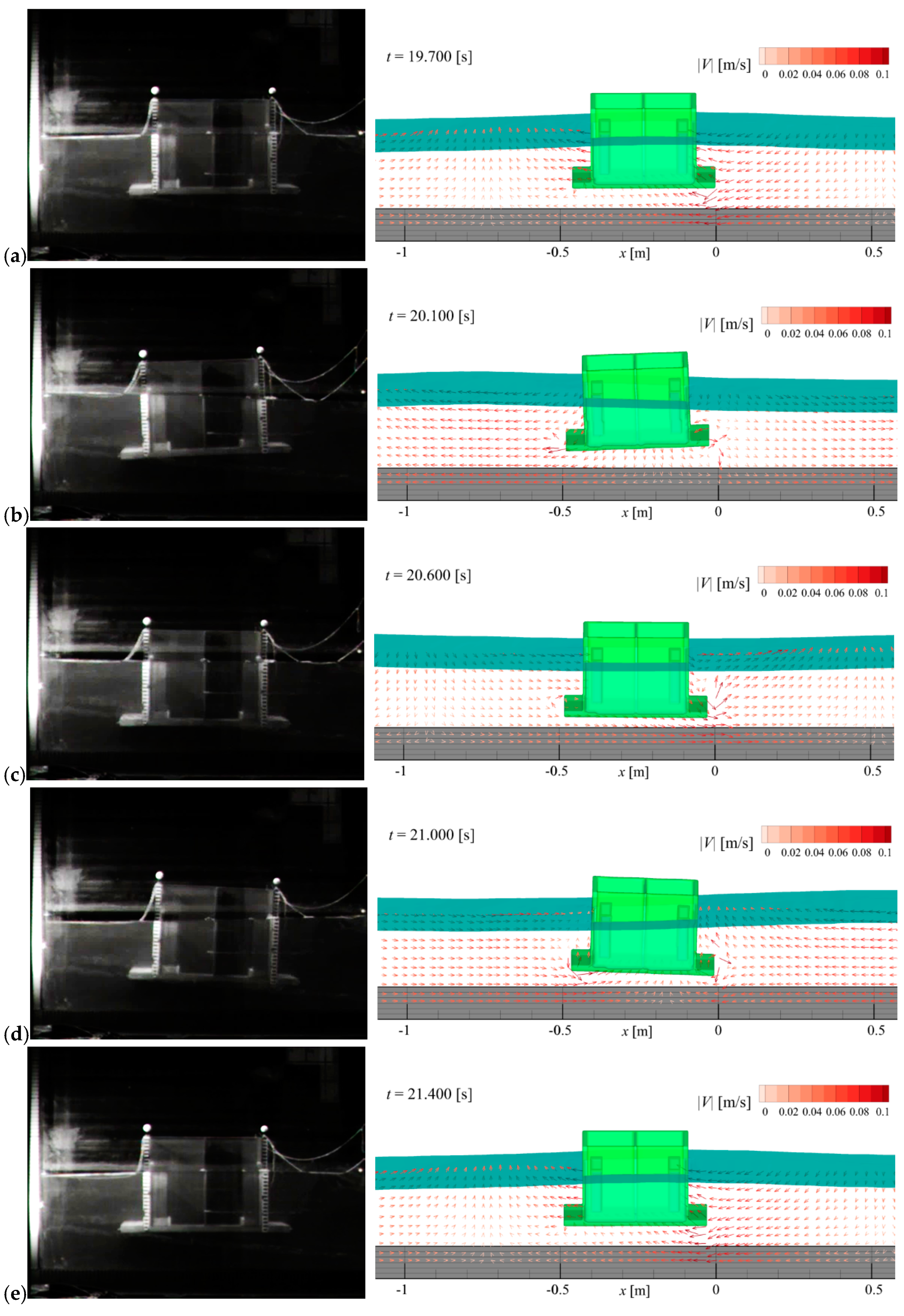
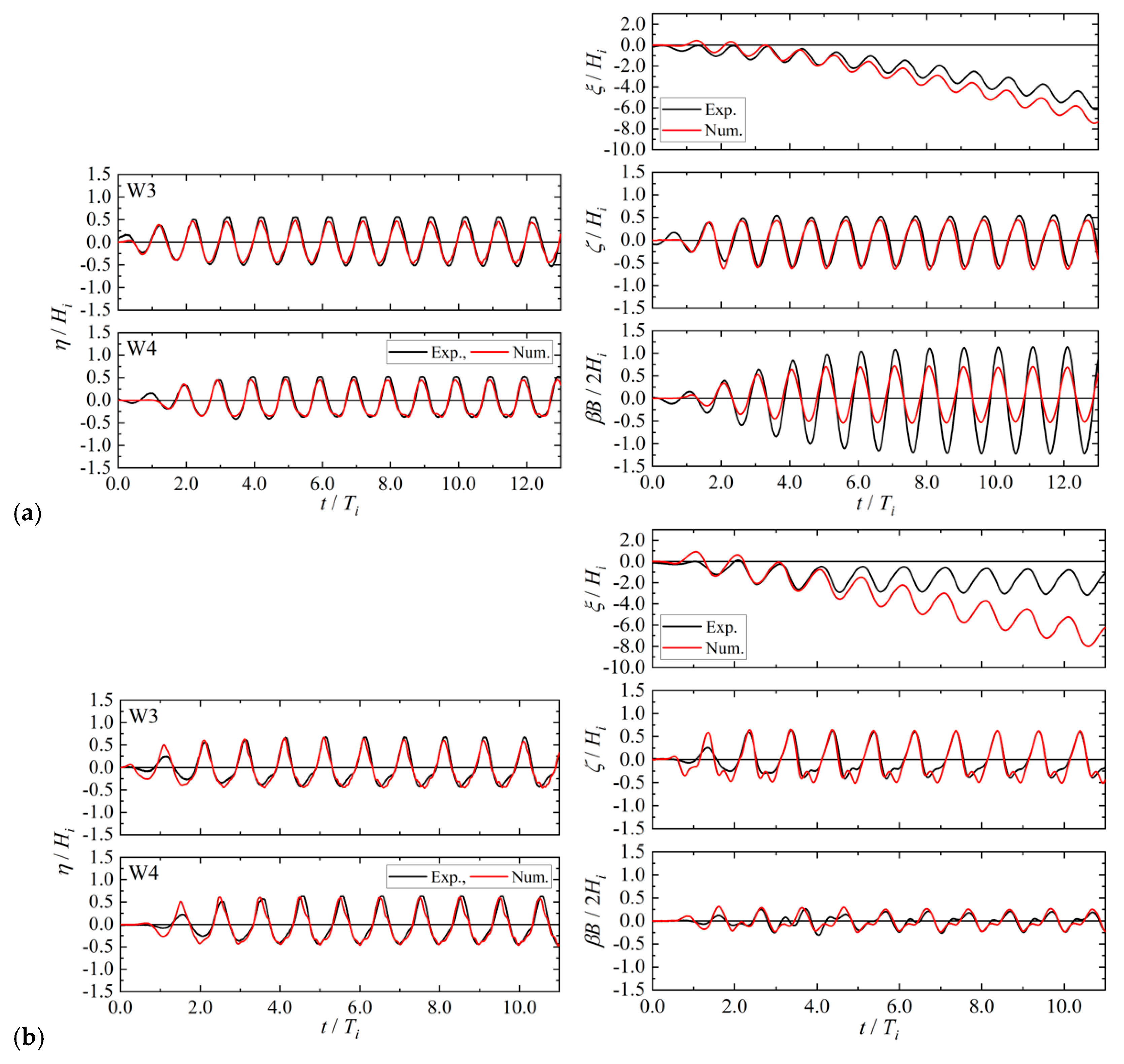
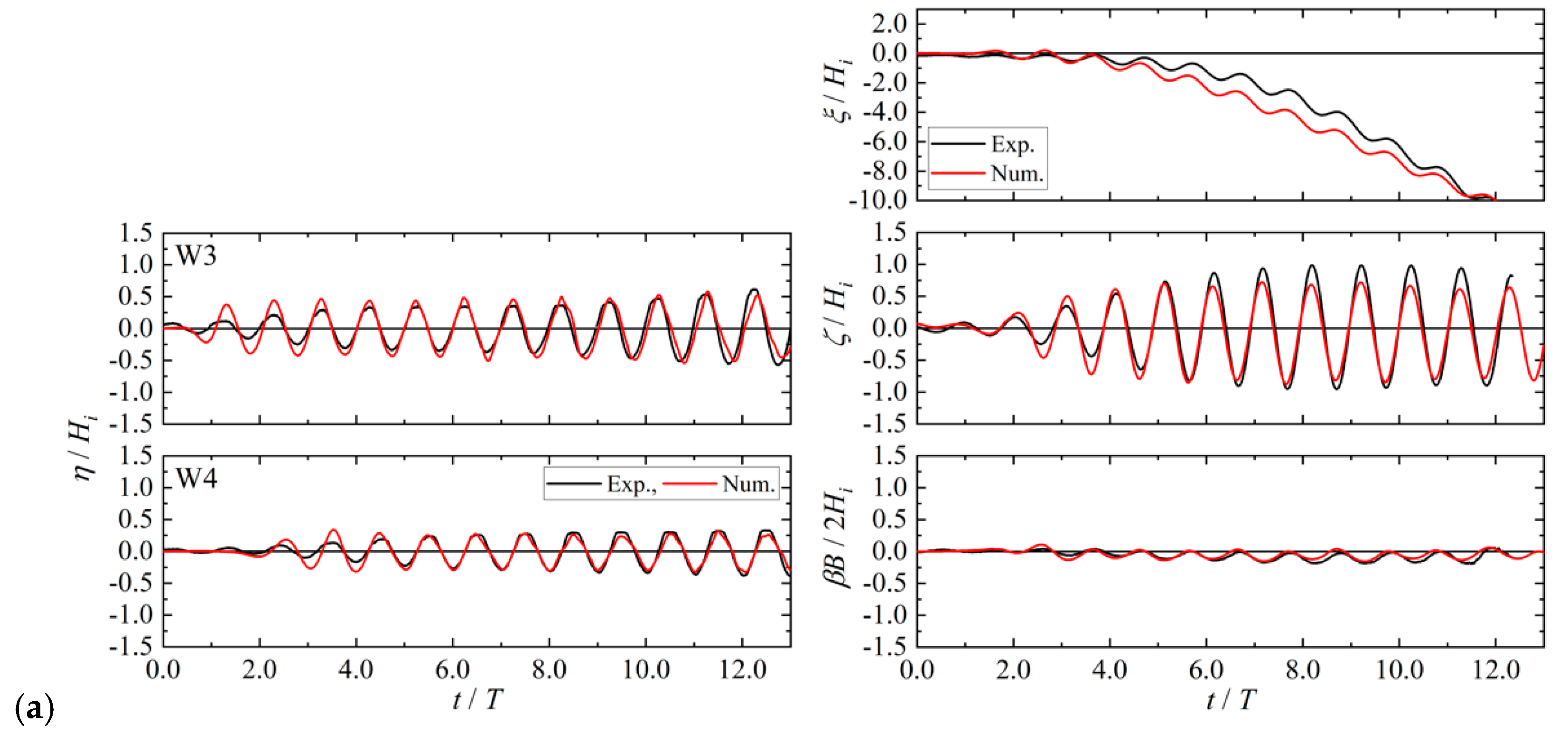
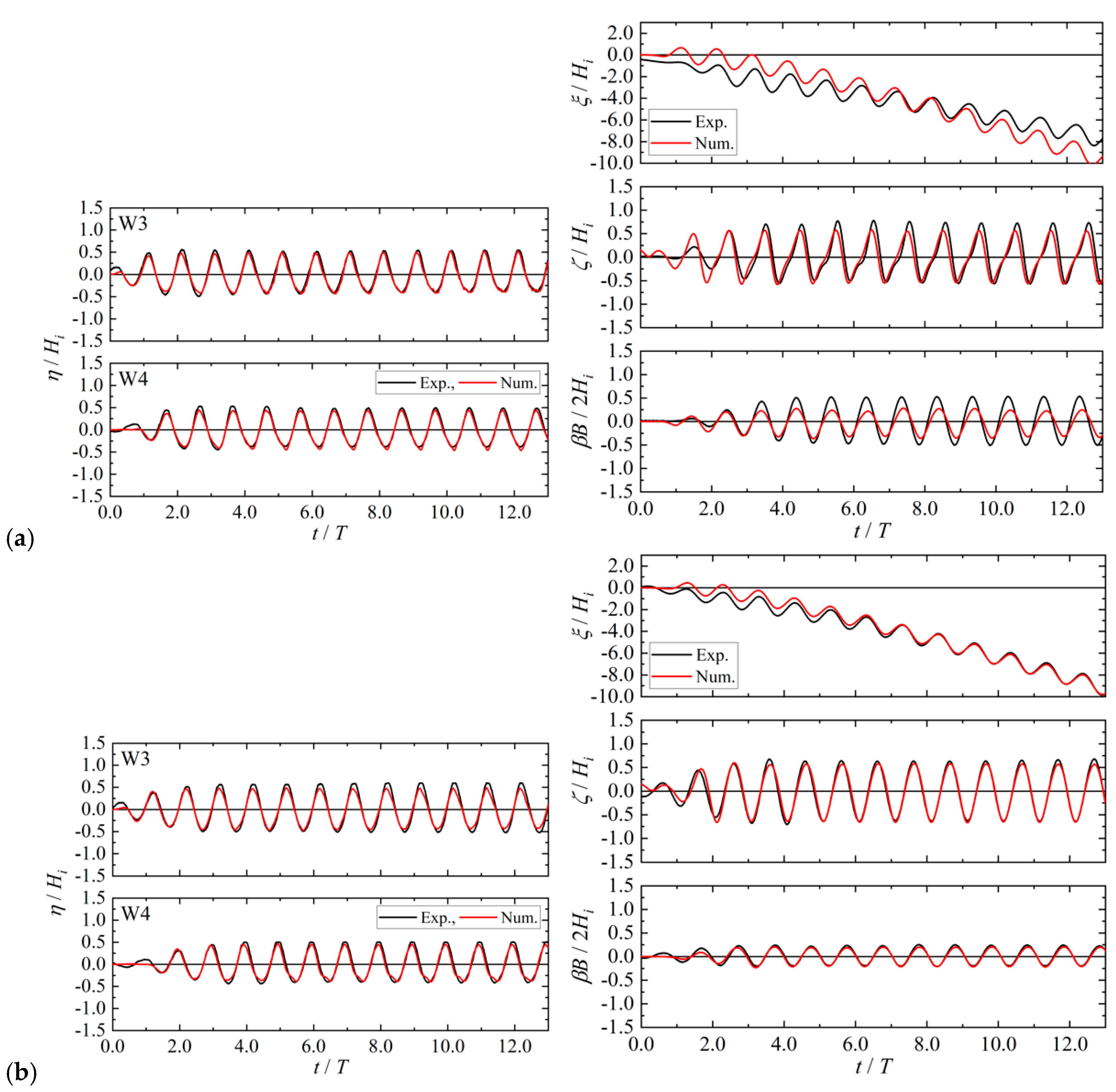
5.1. Comparison under Regular Waves Based on Hydraulic Model Experiments
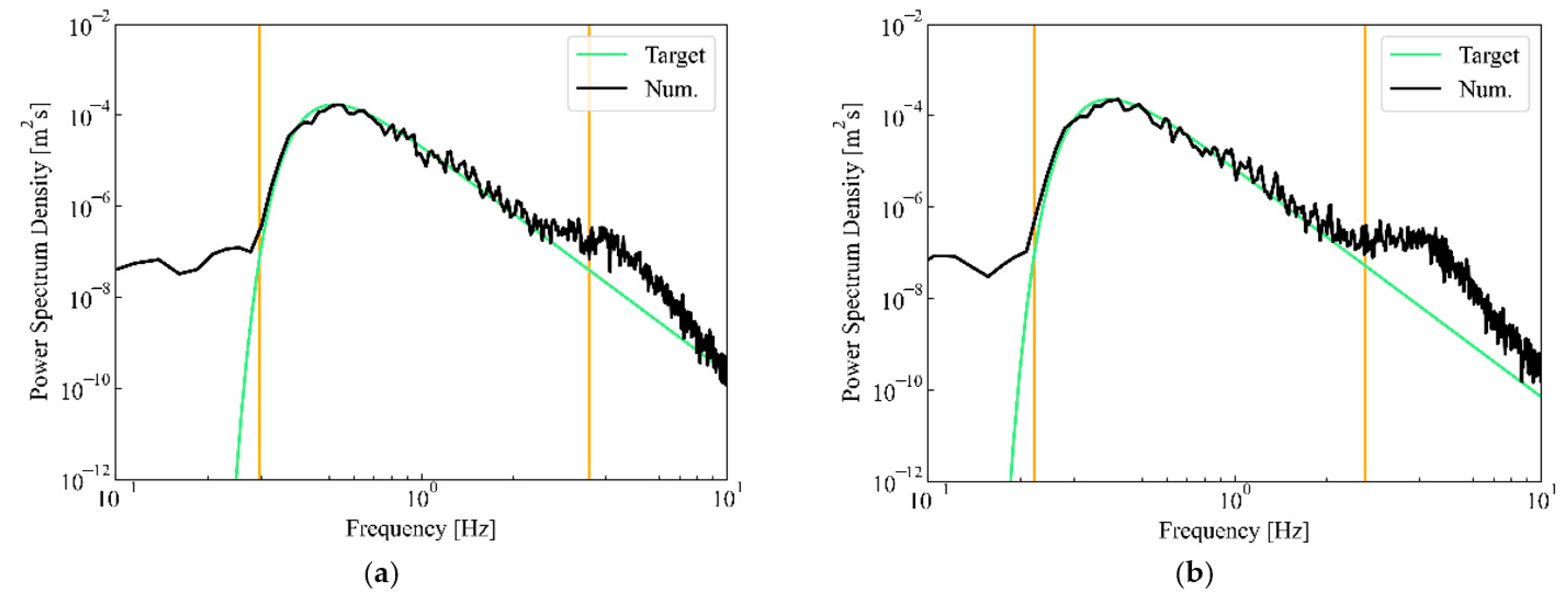
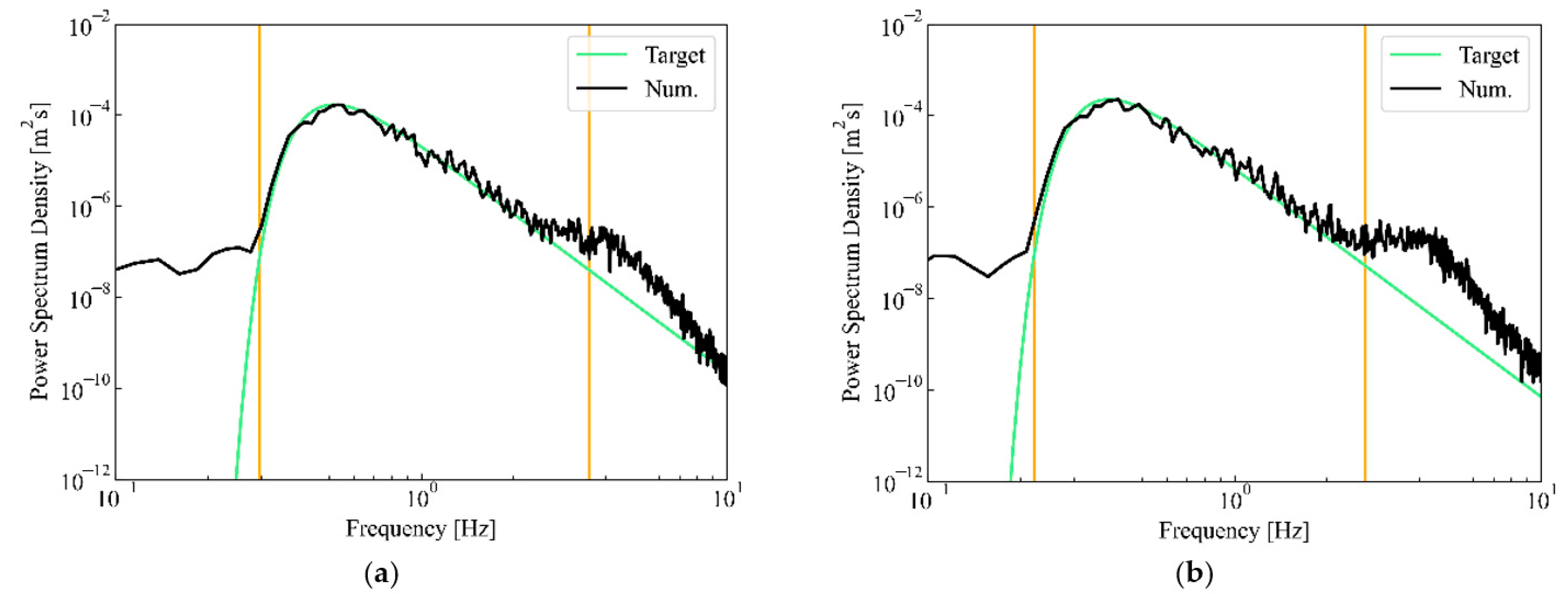
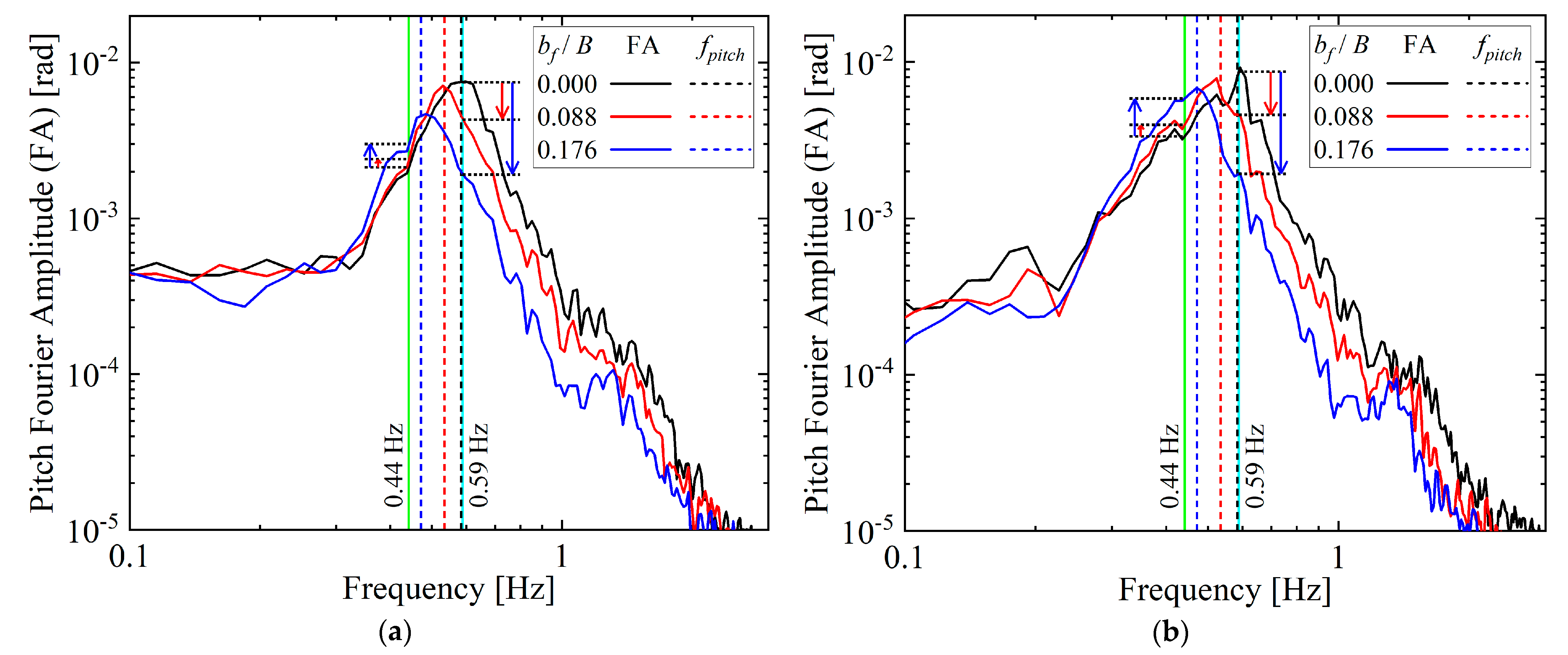
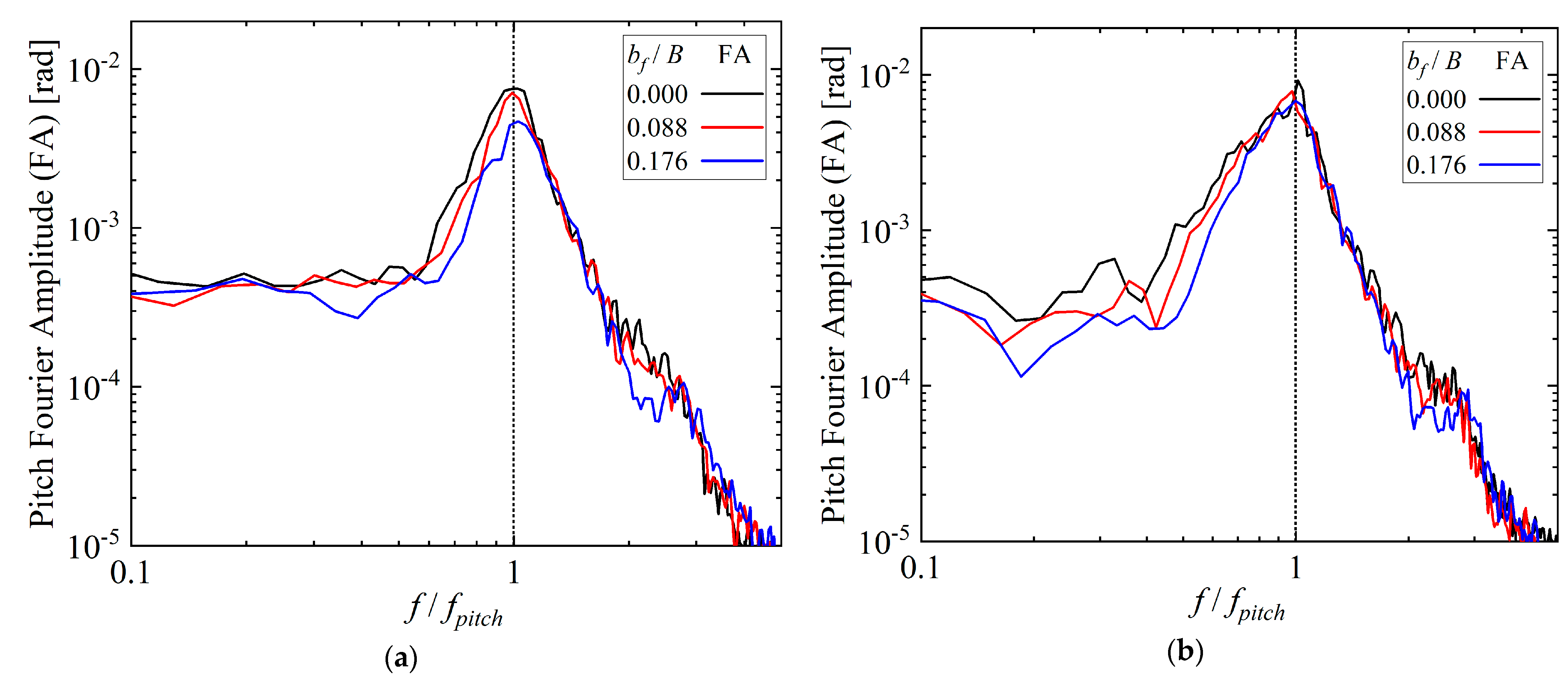
5.2. Response of Caisson under Irregular Waves
6. Conclusions
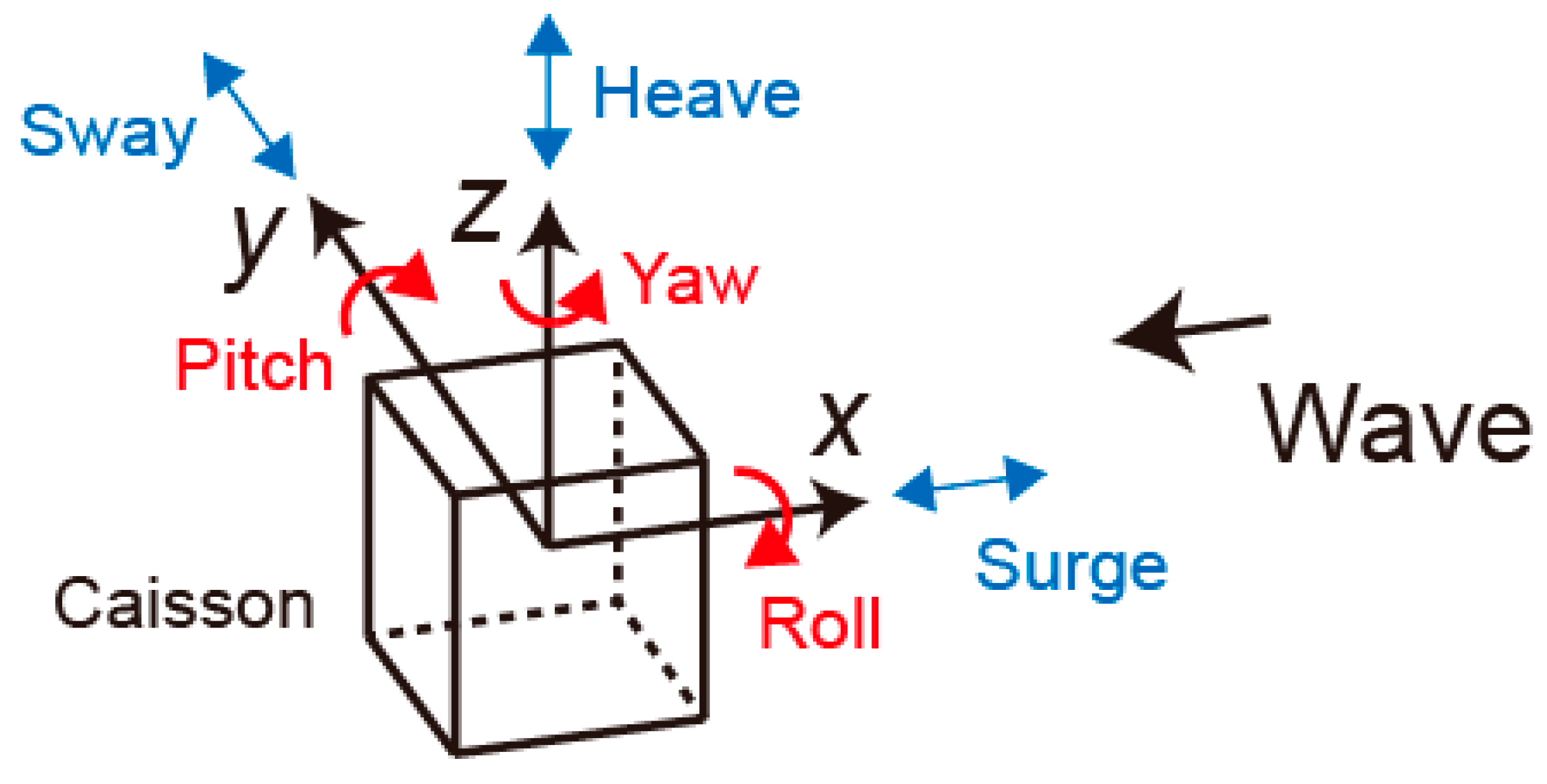
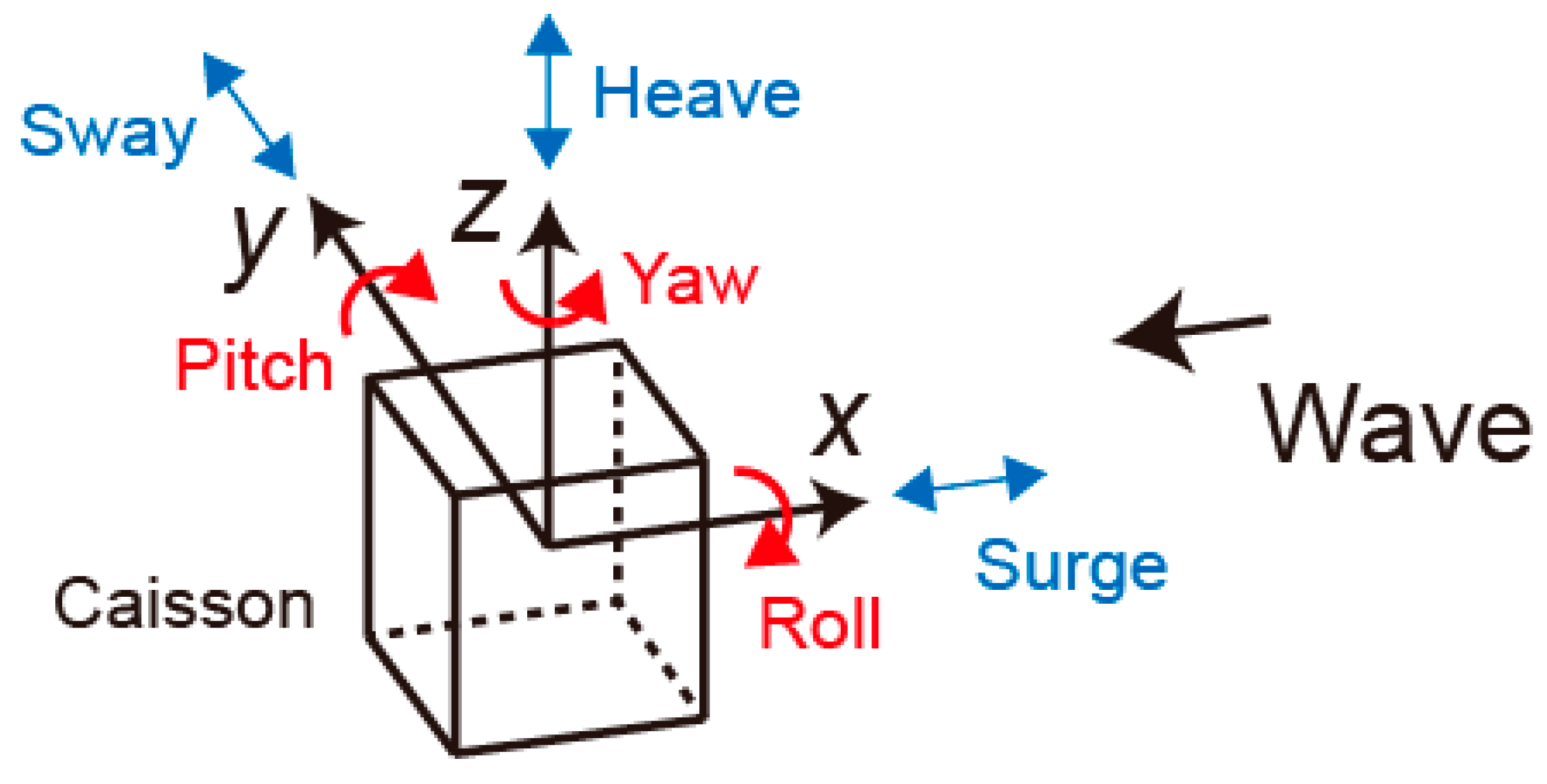
- Regarding the heave of the caisson, the natural frequency of the heave fheave was little affected by the footing length bf. This suggests that it is essential to design caissons such that the natural frequency of the heave fheave does not coincide with the frequency of waves, as expected using towing operations.
- Regarding the pitch of the caisson, the relative total amplitude of the pitch βampB/(2Hi) increased as the relative incident wave frequency fi/fpitch approached 0.5 and 1.0. This suggests that the total amplitude of the pitch βamp could be reduced by designing caissons with the footing length bf, such that the condition of fi/fpitch ≈ 0.5 and 1.0 is avoided.
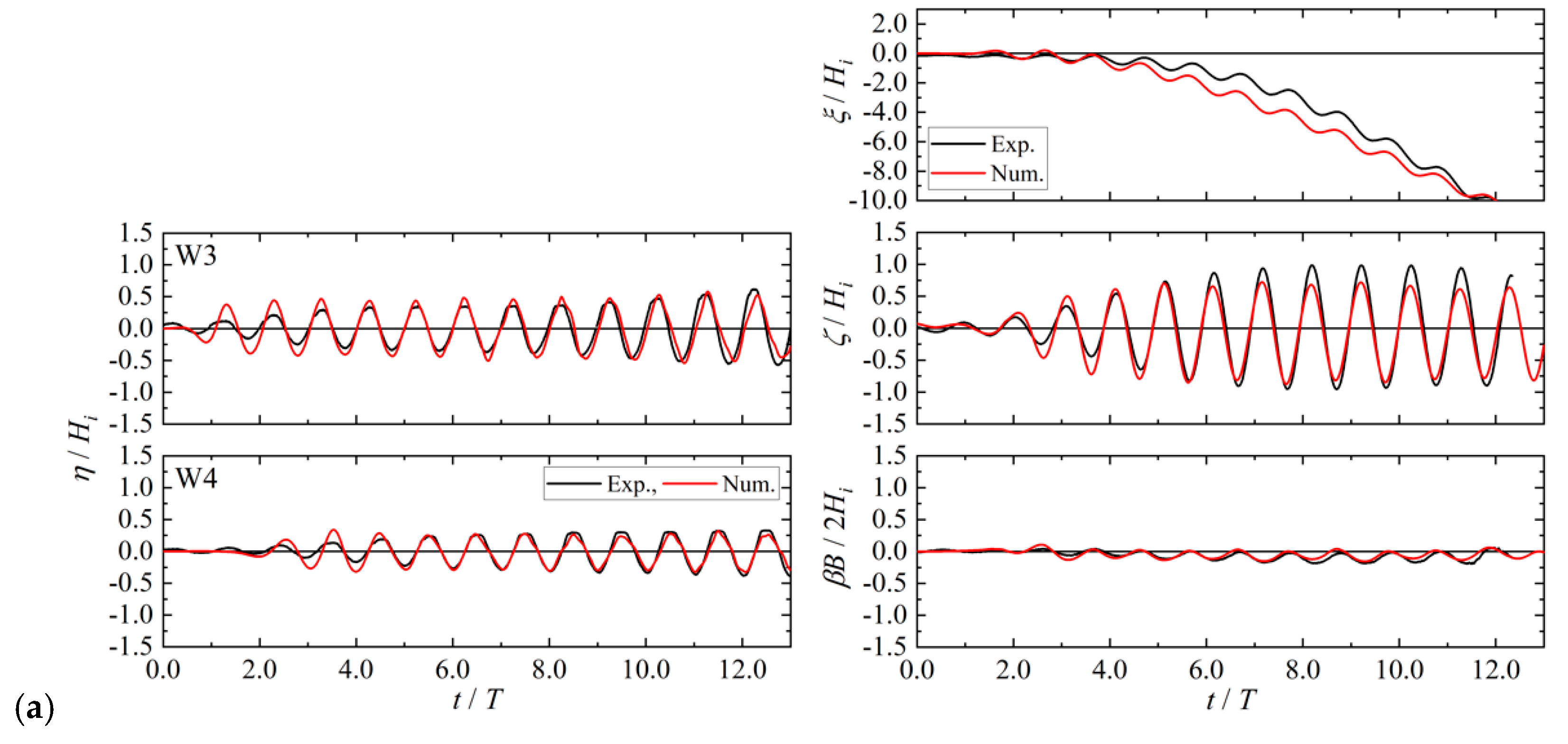
- From a comparison with the experimental data, the predictive capability of the FS3M was demonstrated in terms of the water surface fluctuations and the motion of the caisson, except under the condition of resonance.
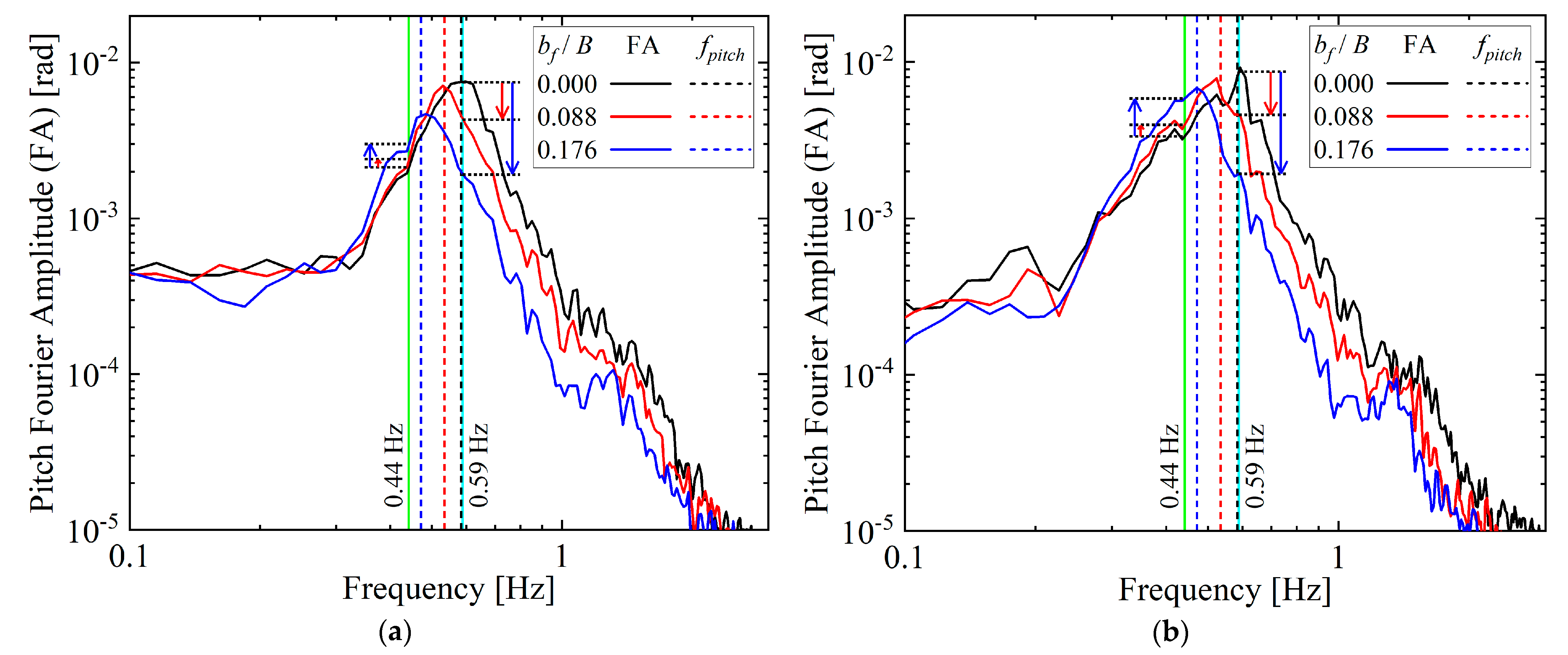
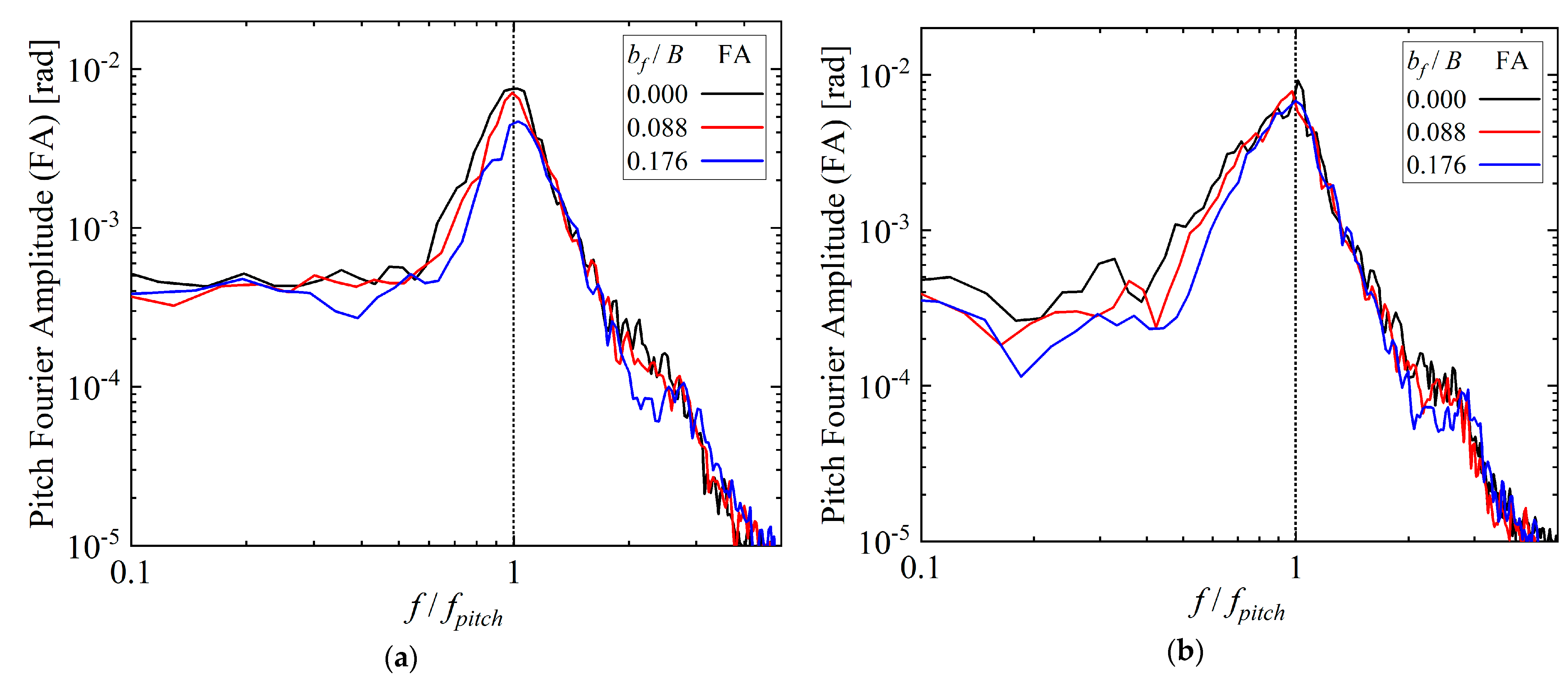
- The Fourier amplitudes of the heave and pitch under irregular waves showed that the footings exhibited an amplification of their low-frequency components and a reduction in their high-frequency components, and this effect was enhanced by increasing the footing length bf.
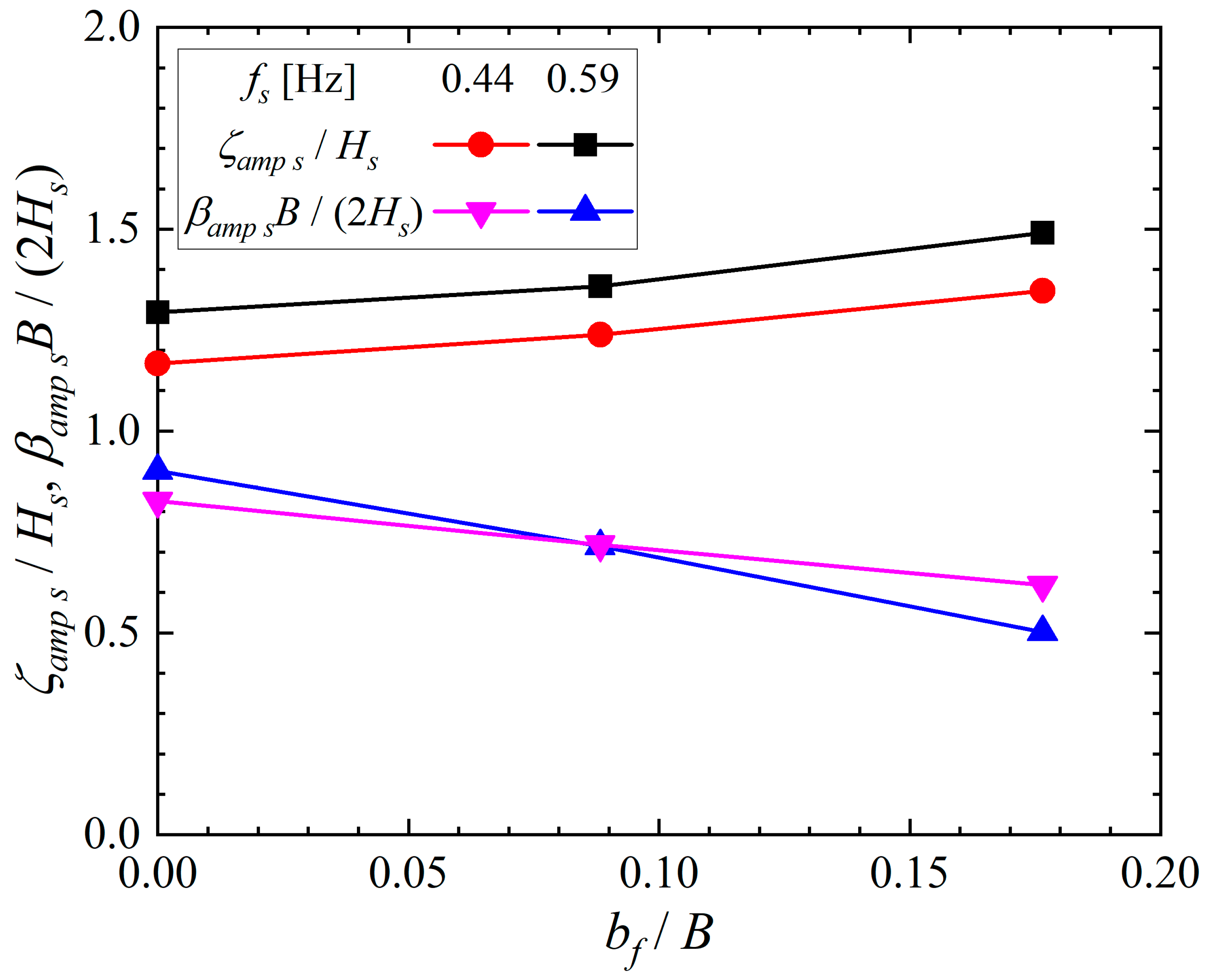
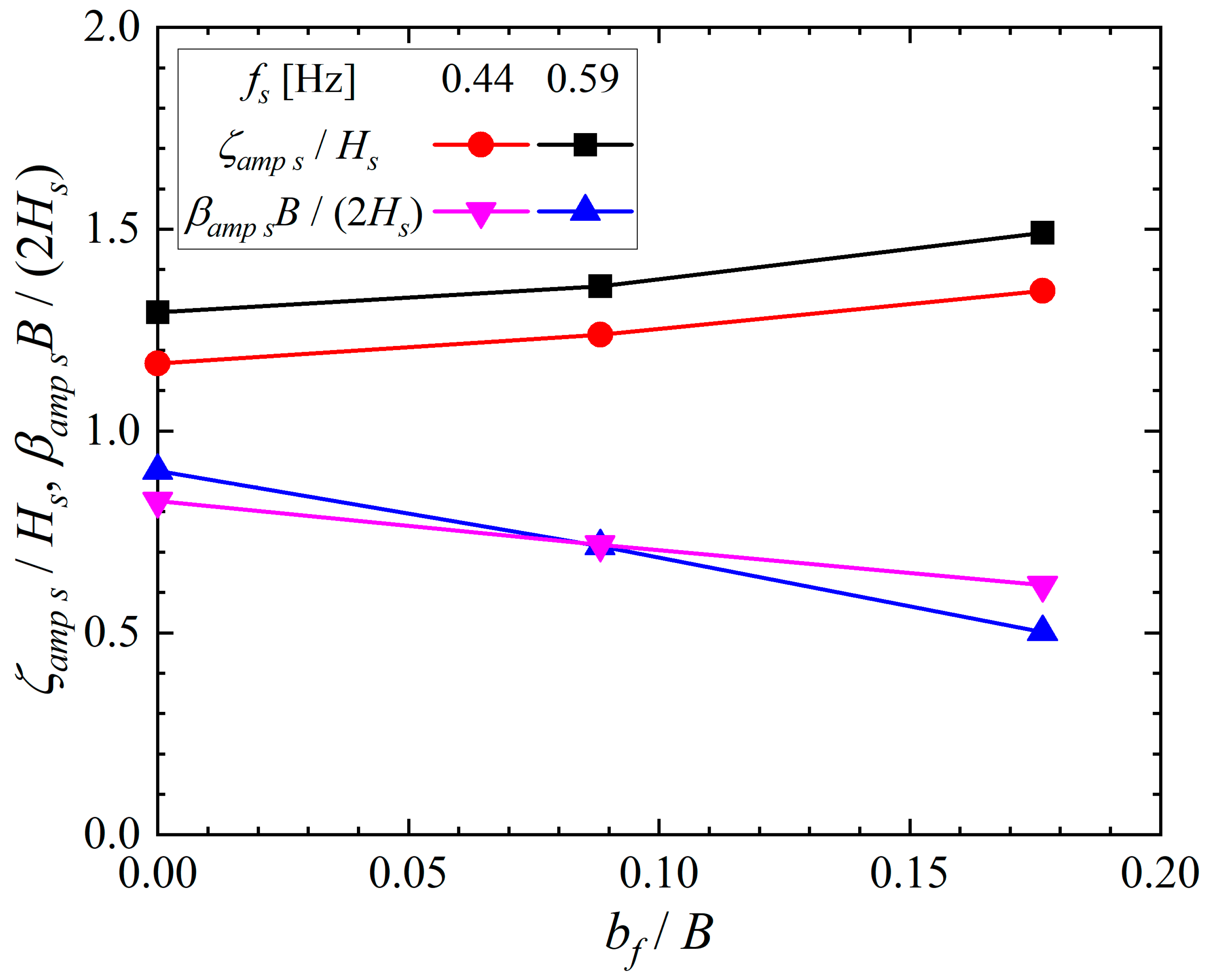
- The significant total amplitudes of the heave ζamps and pitch βamps under irregular waves indicated a different trend from that of the regular waves. This suggests that it is essential to examine the motion of a caisson under irregular waves when evaluating the effect of footings in an actual marine environment.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Chakrabarti, S.K.; Chakrabarti, P.; Krishna, M.S. Design, construction, and installation of a floating caisson used as a bridge pier. J. Waterway Port Coastal and Ocean Eng. 2006, 132, 143–156. [Google Scholar] [CrossRef]
- Huang, Z.; Liu, C.; Kurniawan, A.; Tan, S.K.; Nah, E. Responses of a floating rectangular caisson to regular waves: A comparison of measurements with time-domain and frequency-domain simulations. In Proceedings of the Asian and Pacific Coasts 2009, Singapore, 13–16 October 2009. [Google Scholar]
- Huang, X.; Zhang, W.; Jiang, B.; Lv, Y. Experimental study on the offshore positioning and installing of large caisson. Appl. Mech. Mater. 2014, 580–583, 2129–2133. [Google Scholar] [CrossRef]
- Kotake, Y.; Oomukai, Y.; Matsumura, A.; Nakamura, T. A study on the behaviour of a relatively small caisson floating in wave fields and its effective installation method. In Proceedings of the Coasts, Marine Structures and Breakwaters Conference: Realising the Potential, Liverpool, UK, 5–7 September 2017. [Google Scholar]
- Nakamura, T.; Mizutani, N. Development of fluid-sediment-seabed interaction model and its application. In Proceedings of the 34th International Conference on Coastal Engineering, Seoul, Korea, 15–20 September 2014. [Google Scholar]
- Meneses, L.; Sarmiento, J.; de los Dolores, D.; Blanco, D.; Guanche, R.; Losada, I.J.; Rodriguez de Segovia, M.F.; Ruiz, M.J.; Martín, M.A.; Conde, M.J.; et al. Large scale physical modelling for a floating concrete caisson in marine works. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Gu, H.; Wang, H.; Zhai, Q.; Feng, W.; Cao, J. Study on the dynamic responses of a large caisson during wet-towing transportation. Water 2021, 13, 126. [Google Scholar] [CrossRef]
- Nagasawa, D.; Miyasaka, M.; Wada, Y.; Ikegami, K. Development of motion estimation technique for caisson-type structure considering nonlinear damping force. Proc. Coast. Eng. JSCE 1997, 44, 821–825. (In Japanese) [Google Scholar]
- Ishimi, G.; Shiraishi, S.; Nazato, K. Characteristics of Motions of a Caisson for Breakwater during Installation and Limit Condition of Works at Ocean-Facing Ports; Technical Note of the Port and Harbour Research Institute, Ministry of Transport: Yokosuka, Japan, 1996; (In Japanese with English Abstract). [Google Scholar]
- Michimae, T.; Sanuki, H.; Imamura, T.; Sakai, K.; Koga, D.; Niwa, T.; Itou, Y. Seakeeping properties of towing a massive and asymmetric caisson. J. Jpn. Soc. Civil Eng. Ser. B2 (Coastal Eng.) 2018, 74, I_1051–I_1056, (In Japanese with English abstract). [Google Scholar] [CrossRef]
- Goda, Y. Random Seas and Design of Maritime Structures, 3rd ed.; Advanced Series of Ocean Engineering Vol. 33; World Scientific Publishing Co.: Singapore, 2010; 418p. [Google Scholar]
- Iwagaki, Y. Latest Coastal Engineering; Morikita Publishing Co.: Tokyo, Japan, 1987; p. 250. (In Japanese) [Google Scholar]
- Coastal Development Institute of Technology (CDIT). Practical Computational Examples of CADMAS-SURF; Coastal Development Library No. 30; Coastal Development Institute of Technology: Tokyo, Japan, 2008; p. 364. (In Japanese) [Google Scholar]
- Suzuki, K.; Inamuro, T. Effect of internal mass in the simulation of a moving body by the immersed boundary method. Comput. Fluid 2011, 49, 173–187. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Scale (1/50) | Prototype Scale | |
|---|---|---|
| Length B | 0.34 m | 17.0 m |
| Height | 0.26 m | 13.0 m |
| Width | 0.30 m | 15.0 m |
| Mass | 16.8 kg | 2100 t |
| Draft | 0.16 m | 8.0 m |
| Height of Gravity Center | 0.108 m | 5.4 m |
| Model Scale (1/50) | Prototype Scale | |
|---|---|---|
| Height | 0.02 m | 1.0 m |
| Length bf | 0.00 m | 0.0 m |
| 0.02 m | 1.0 m | |
| 0.03 m | 1.5 m | |
| 0.04 m | 2.0 m | |
| 0.06 m | 3.0 m |
| Still Water Depth h [m] | Wave Height Hi [m] | Wave Frequency fi [Hz] | Goda’s Nonlinear Parameter Π |
|---|---|---|---|
| 0.30 | 0.03 | 0.88 | 0.033 |
| 0.30 | 0.03 | 0.59 | 0.051 |
| 0.30 | 0.03 | 0.44 | 0.079 |
| 0.30 | 0.03 | 0.35 | 0.117 |
| 0.30 | 0.03 | 0.29 | 0.163 |
| 0.30 | 0.03 | 0.25 | 0.218 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nakamura, T.; Nagayama, N.; Cho, Y.-H.; Mizutani, N.; Kurahara, Y.; Takeda, M. Motion of Floating Caisson with Extended Bottom Slab under Regular and Irregular Waves. J. Mar. Sci. Eng. 2021, 9, 1129. https://doi.org/10.3390/jmse9101129
Nakamura T, Nagayama N, Cho Y-H, Mizutani N, Kurahara Y, Takeda M. Motion of Floating Caisson with Extended Bottom Slab under Regular and Irregular Waves. Journal of Marine Science and Engineering. 2021; 9(10):1129. https://doi.org/10.3390/jmse9101129
Chicago/Turabian StyleNakamura, Tomoaki, Naoto Nagayama, Yong-Hwan Cho, Norimi Mizutani, Yoshinosuke Kurahara, and Masahide Takeda. 2021. "Motion of Floating Caisson with Extended Bottom Slab under Regular and Irregular Waves" Journal of Marine Science and Engineering 9, no. 10: 1129. https://doi.org/10.3390/jmse9101129
APA StyleNakamura, T., Nagayama, N., Cho, Y.-H., Mizutani, N., Kurahara, Y., & Takeda, M. (2021). Motion of Floating Caisson with Extended Bottom Slab under Regular and Irregular Waves. Journal of Marine Science and Engineering, 9(10), 1129. https://doi.org/10.3390/jmse9101129