Surveillance Simulator for Undersea Aquaculture Monitoring

Abstract
1. Introduction
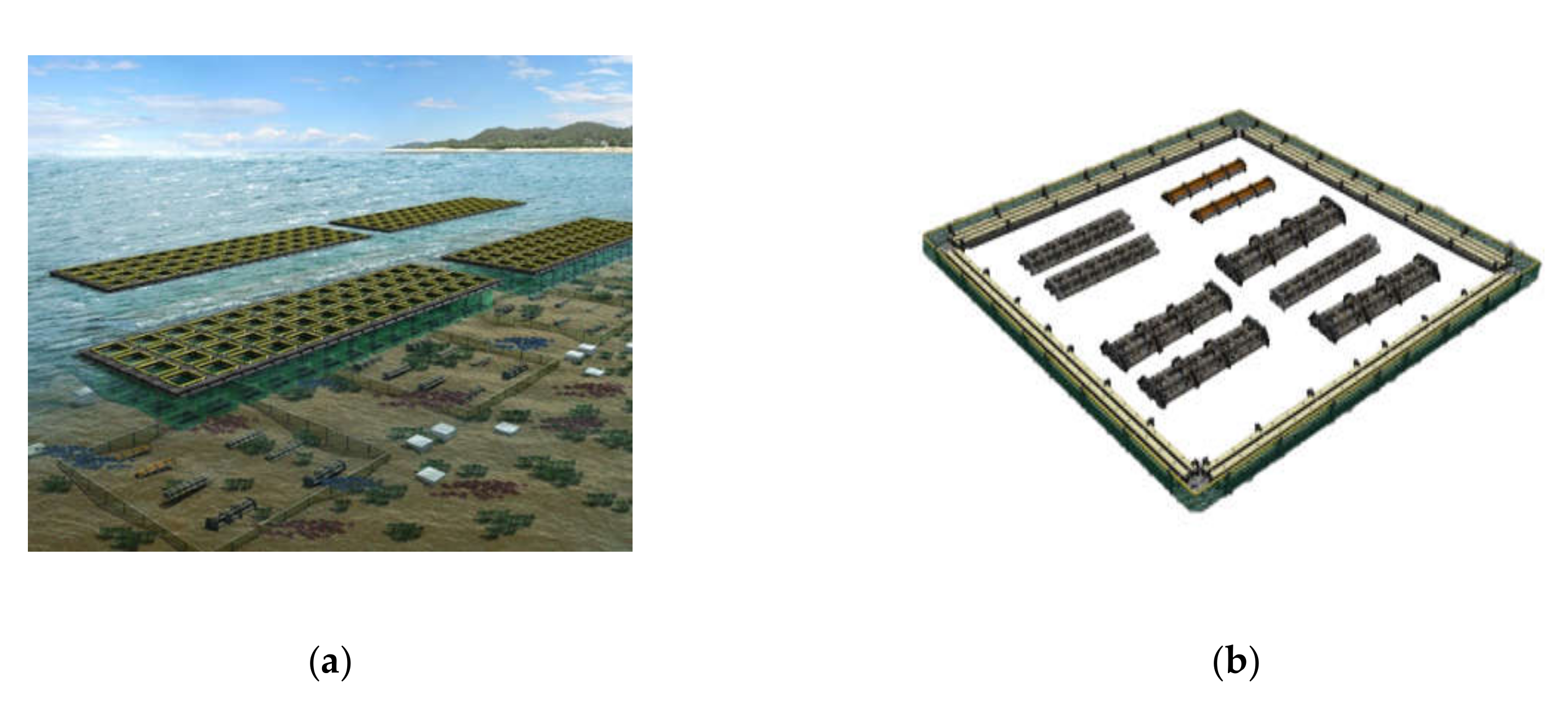
2. The Environment and Conditions of the Underwater Aquaculture Surveillance System
3. Underwater Aquaculture Surveillance System
3.1. An Intruder Behavior Model
3.1.1. The Constant Velocity Case
3.1.2. The Constant Acceleration Case
3.1.3. Measurement Equation
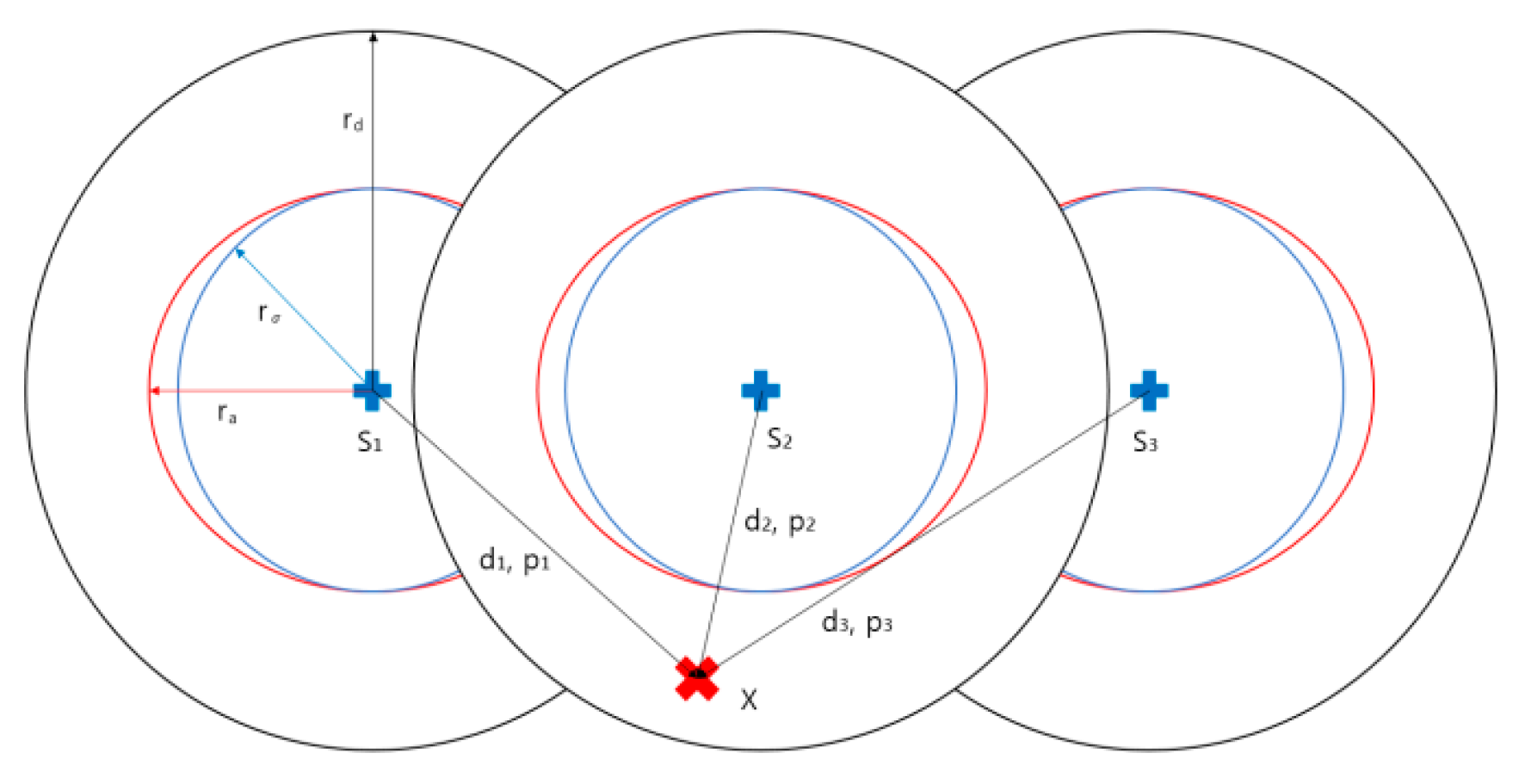
3.2. Design of a Sensor Model
3.2.1. Application of Statistical Theories
3.2.2. Convergence of Information from Multiple Sensors
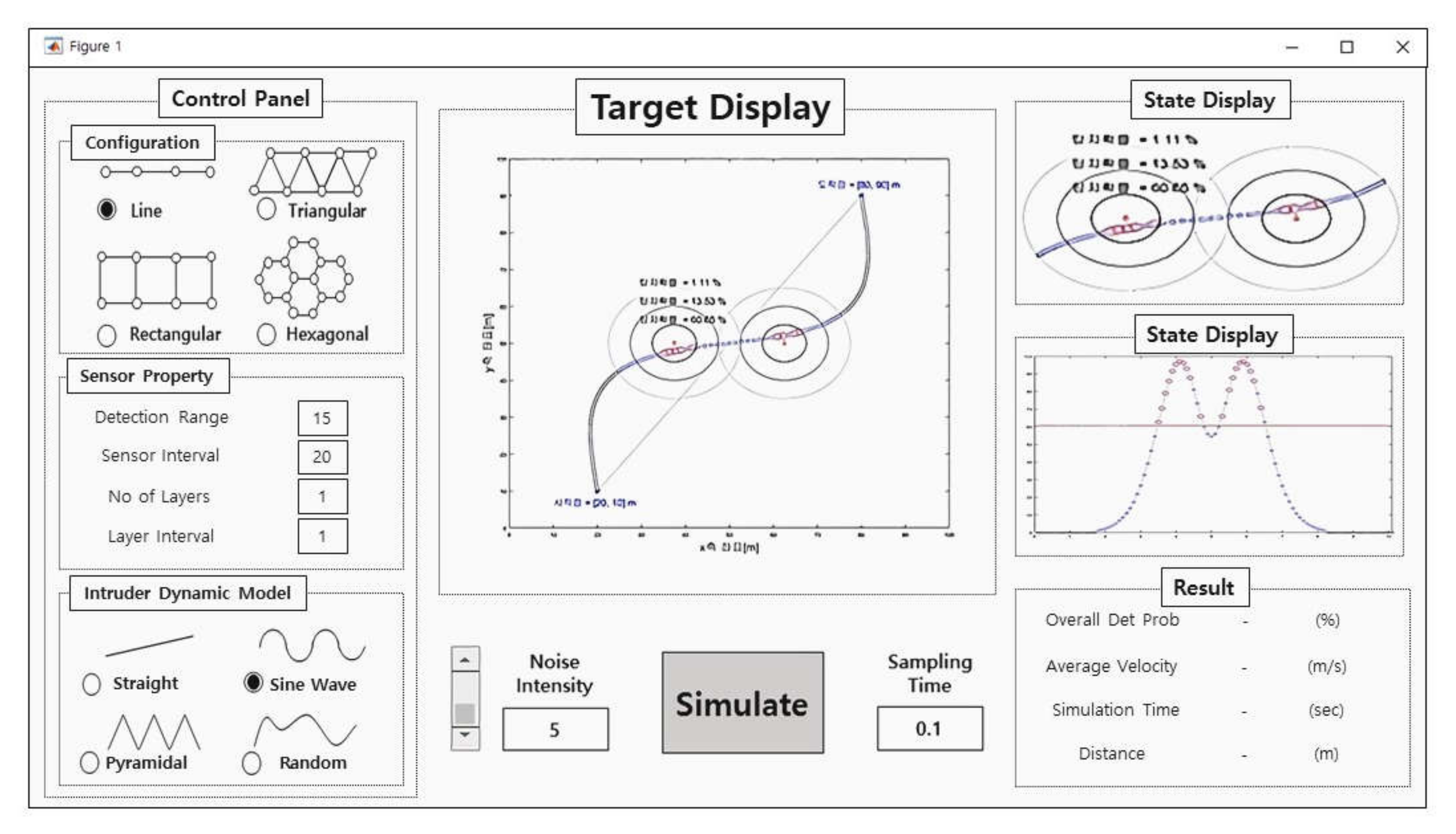
4. An Integrated Simulator
4.1. The Composition of the Simulator
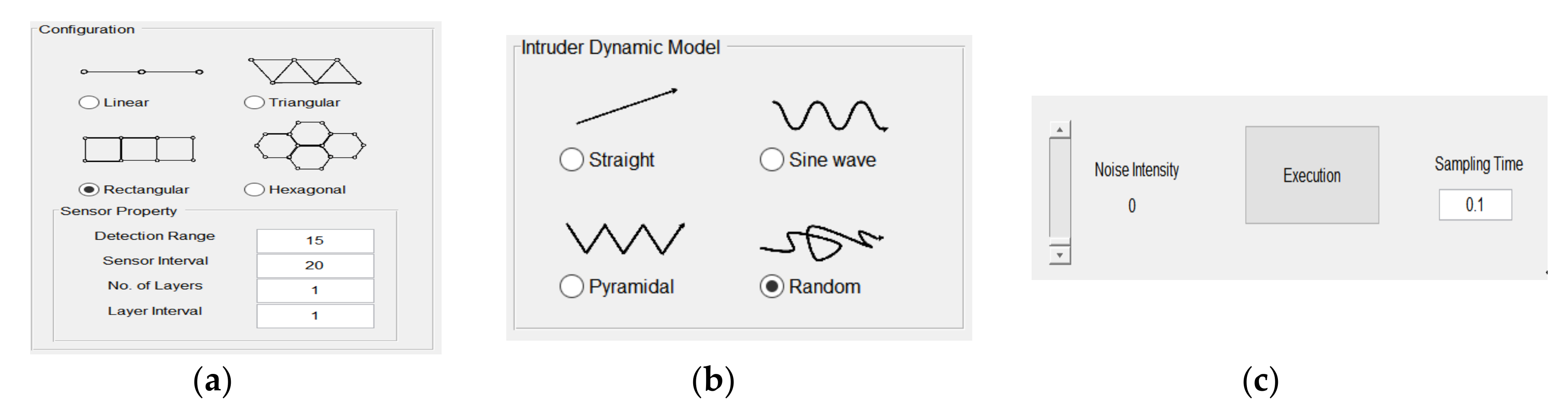
4.1.1. Sensor Configuration
4.1.2. The Intruder Behavior Model
4.1.3. Other Issues
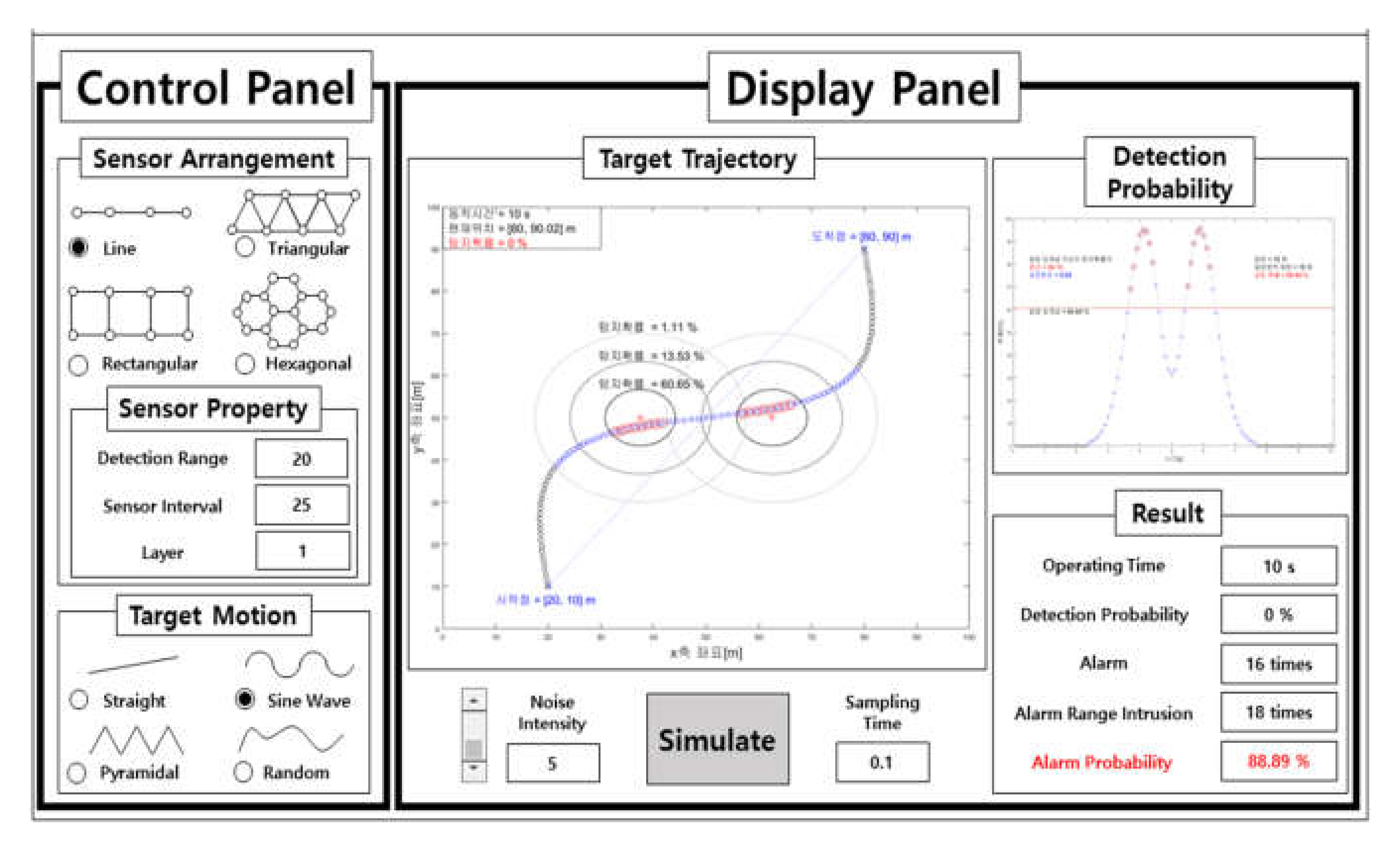
4.2. Display Domain
4.3. Performance Evaluation and Results
5. Conclusions and Future Plans
Author Contributions
Funding
Conflicts of Interest
References
- Kim, C.-S.; Jeong, J.-S.; Park, S.-H. A study on remote monitoring system for protecting aquaculture farms. J. Korean Soc. Mar. Environ. Saf. 2004, 10, 55–60. (In Korean) [Google Scholar]
- Yim, J.B.; Nam, T.K. Implementation of unmanned aquaculture security system. J. Korean Soc. Mar. Environ. Saf. 2007, 13, 61–67. (In Korean) [Google Scholar]
- Reshma, B.; Kumar, S.S. Precision aquaculture drone algorithm for delivery in sea cages. In Proceedings of the 2016 IEEE International Conference on Engineering and Technology, Coimbatore, India, 17–18 March 2016; pp. 1264–1270. (In India). [Google Scholar]
- Akyildiz, I.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef]
- Akyildiz, I.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Min, S.H.; Choi, J.W. Development of an underwater fish farm surveillance simulator. Inst. Control Robot. Syst. 2017, 23, 497–502. [Google Scholar] [CrossRef]
- Yu, C.H.; Choi, J.W. Underwater wireless sensor networks-based distributed tracking filter for a fish farm trespasser. J. Inst. Control Robot. Syst. 2018, 24, 133–140. [Google Scholar] [CrossRef]
- Yu, C.H.; Choi, J.W. Interacting multiple model filter-based distributed target tracking algorithm in underwater wireless sensor networks. Int. J. Control Autom. Syst. 2014, 12, 618–627. [Google Scholar] [CrossRef]
- Samuel, K.; Choi, J.W. Improved IMM filter for tracking a highly maneuvering target with mixed system noises. Int. J. Control Autom. Syst. 2018, 16, 2763–2771. [Google Scholar] [CrossRef]
- Park, C.R.; Bae, M.S. Current state of open sea aquaculture and promotion work for vitalization. Nat. Assem. Res. Serv. Field Surv. Rep. 2012, 23, 1–12. (In Korean) [Google Scholar]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part I: Dynamic models. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 103–123. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory, Algorithms, and Software; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2001. [Google Scholar]
- Gelb, A.; Kasper, J.F.; Nash, R.A.; Price, C.F.; Sutherland, A.A. Applied Optimal Estimation; The Massachusetts Institute of Technology Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Maybeck, P.S. Stochastic Models, Estimation, and Control; Academic Press: Cambridge, MA, USA, 1994; Volume 1. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detection Radius | Sensor Interval = 15 m | ||
|---|---|---|---|
| Alarm | Intrusion Alarm Domain | Intrusion Detection Domain | |
| 20 m | 1155 times | 1400 times | 3900 times |
| 25 m | 1116 times | 1400 times | 4300 times |
| 30 m | 1002 times | 1255 times | 4700 times |
| Detection Radius | Sensor interval = 20 m | ||
| Alarm | Intrusion alarm domain | Intrusion detection domain | |
| 20 m | 1674 times | 2040 times | 4900 times |
| 25 m | 1579 times | 1800 times | 5300 times |
| 30 m | 1522 times | 1800 times | 5700 times |
| Detection Radius | Sensor interval = 25 m | ||
| Alarm | Intrusion alarm domain | Intrusion detection domain | |
| 20 m | 2269 times | 2700 times | 5904 times |
| 25 m | 2187 times | 2600 times | 6500 times |
| 30 m | 2033 times | 2600 times | 6706 times |
| Detection Radius | Sampling Time = 0.01 s | ||
|---|---|---|---|
| Alarm | Intrusion Alarm Domain | Intrusion Detection Domain | |
| 20 m | 20,781 times | 21,700 times | 20,318 times |
| 25 m | 24,900 times | 26,200 times | 24,800 times |
| 30 m | 59,900 times | 64,300 times | 67,900 times |
| Detection Radius | Sampling time = 0.05 s | ||
| Alarm | Intrusion alarm domain | Intrusion detection domain | |
| 20 m | 4550 times | 5300 times | 11,900 times |
| 25 m | 4348 times | 5200 times | 12,900 times |
| 30 m | 4084 times | 5000 times | 13,500 times |
| Detection Radius | Sampling time = 0.1 s | ||
| Alarm | Intrusion alarm domain | Intrusion detection domain | |
| 20 m | 2269 times | 2700 times | 5904 times |
| 25 m | 2187 times | 2600 times | 6500 times |
| 30 m | 2033 times | 2600 times | 6706 times |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Min, S.-H.; Lee, J.-H.; Choi, J.W. Surveillance Simulator for Undersea Aquaculture Monitoring. J. Mar. Sci. Eng. 2020, 8, 404. https://doi.org/10.3390/jmse8060404
Min S-H, Lee J-H, Choi JW. Surveillance Simulator for Undersea Aquaculture Monitoring. Journal of Marine Science and Engineering. 2020; 8(6):404. https://doi.org/10.3390/jmse8060404
Chicago/Turabian StyleMin, Su-Hong, Jae-Hak Lee, and Jae Weon Choi. 2020. "Surveillance Simulator for Undersea Aquaculture Monitoring" Journal of Marine Science and Engineering 8, no. 6: 404. https://doi.org/10.3390/jmse8060404
APA StyleMin, S.-H., Lee, J.-H., & Choi, J. W. (2020). Surveillance Simulator for Undersea Aquaculture Monitoring. Journal of Marine Science and Engineering, 8(6), 404. https://doi.org/10.3390/jmse8060404