2.1. Data Pre-Processing
The state data of the CSO power system is measured by the voltage and current sensors in undersea stations and shore stations. These data have gross errors and will affect fault location accuracy. In order to eliminate the data with gross errors, data pre-processing is used based on the Grubbs criterion [
12].
In CSOs, the sampling period of sensors is one second. Every data group of 15 samples is collected to calculate the mean value and the standard deviation. According to the Grubbs criterion, when the residual of the measurement data xi is satisfied , it is considered to be abnormal and should be deleted. In the above equation, vi means the residual of the measurement, x means the average of the group data, i means the number of the group data, n means the measurement times in a data group, a means the probability of abandoning true data, and means the standard deviation of the group data. When n = 15 and a = 0.05, g(n,a) = 2.41.
This step can ensure the reliability of the data and prepare for parameter estimation.
2.2. Parameter Estimation
The CSOs use submarine cables to transmit the electrical power. The resistance of a submarine cable can be expressed as:
In the equation,
L means cable length,
S means the conductor cross-sectional area,
means the resistivity. The relationship between resistivity and temperature can be expressed as:
In the function, is the resistivity of submarine cable in 0 °C and represents the temperature coefficient of resistivity. The conductor of submarine cables is made of copper, thus = 0.00393.
The cable resistance at 20 °C is 1 Ω/km. The seawater temperature can be from 2 °C to 30 °C. As the current in the cable is low, the conductor temperature can be considered to be the same as the seawater temperature. From Equations (1) and (2), we can calculate that the cable resistance is 0.93–1.04 Ω/km. It can be seen that for CSOs with thousands of kilometers, the seawater temperature will have a significant impact on the cable resistance, which is an important parameter of the power model. Since the fault location approach needs accurate power system parameters, parameter estimation for cable resistances is used.
The spur cables are short in length and fixed in position. Their depths and temperatures can be gained through the sensors in the nearest undersea stations, so that the resistances can be calculated through Equation (1) and (2). The voltage of a branch node can be calculated by the spur cable resistance and the input voltage and current of the undersea station.
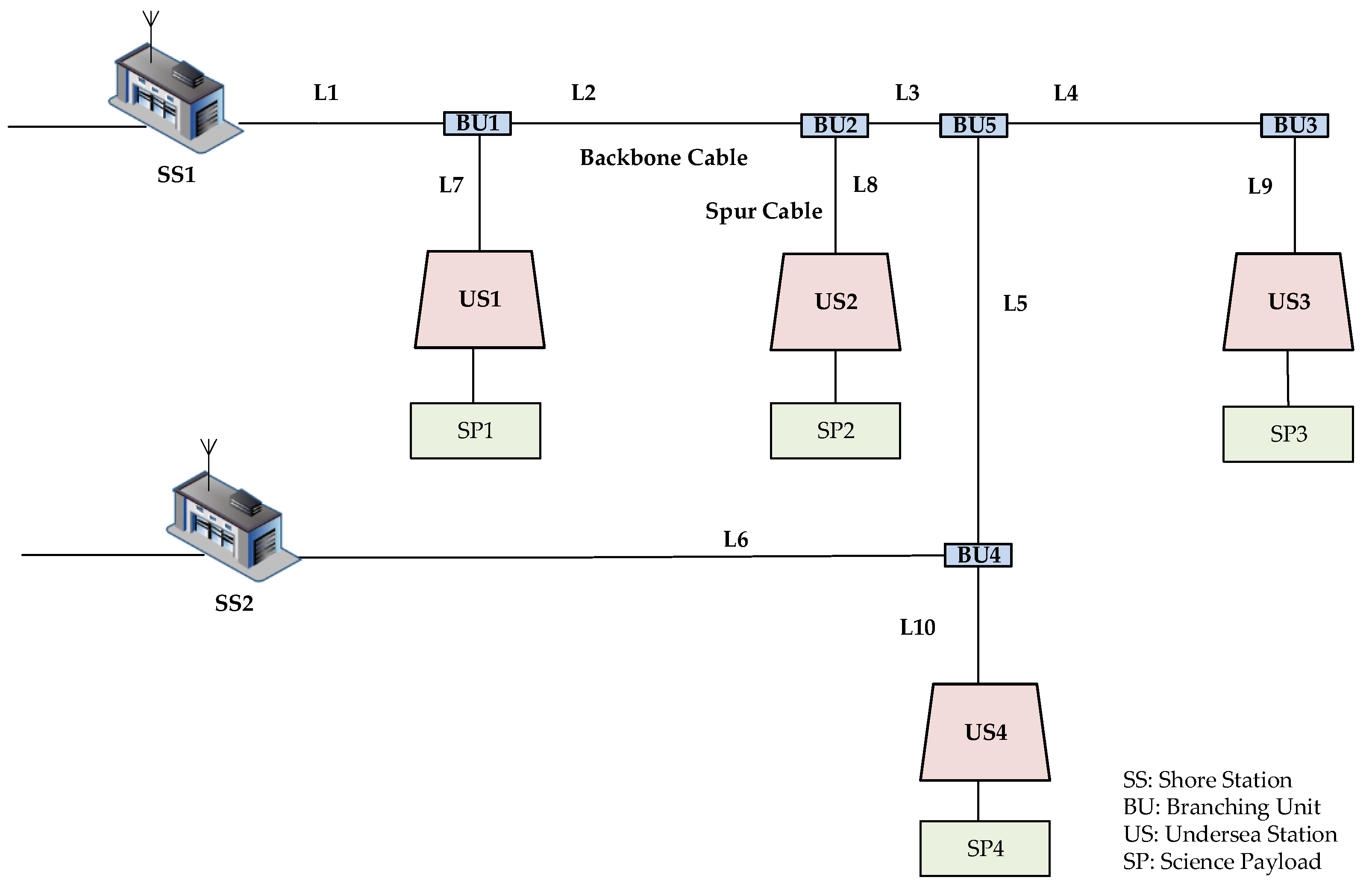
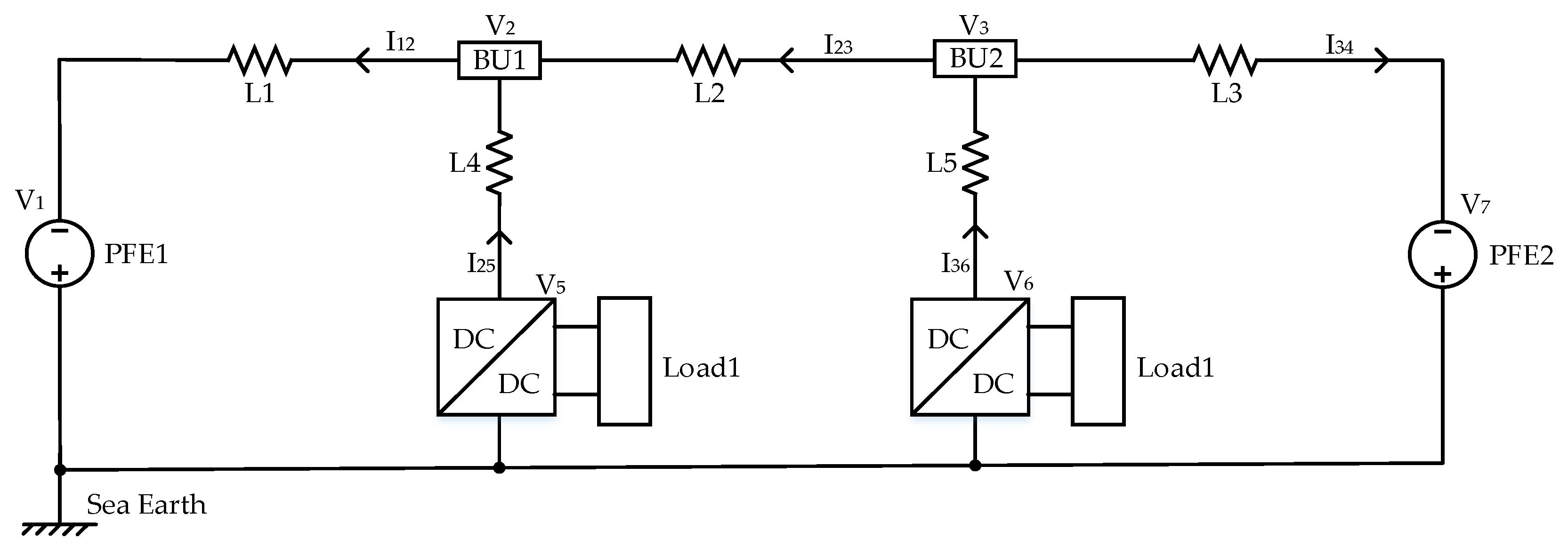
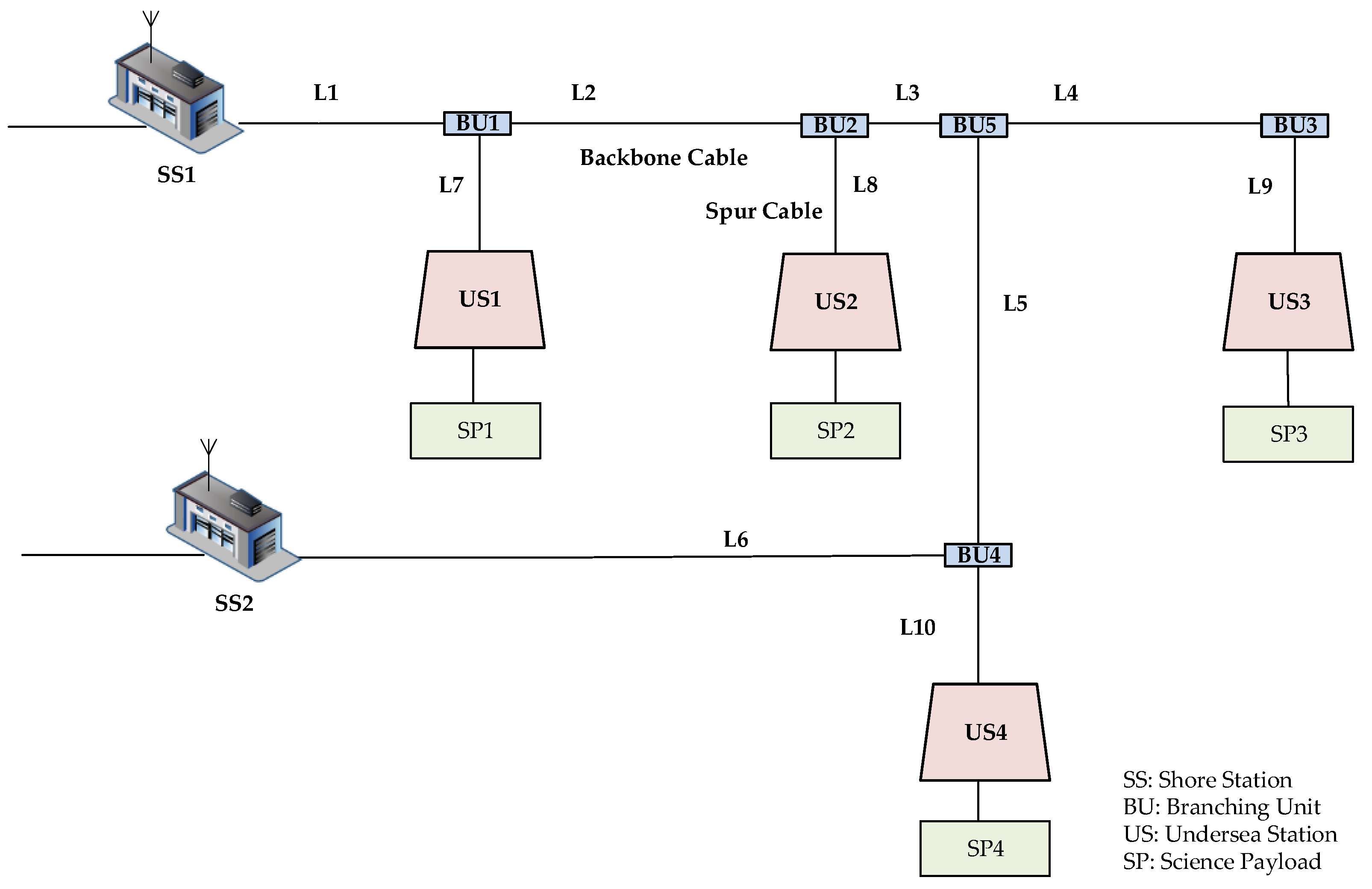
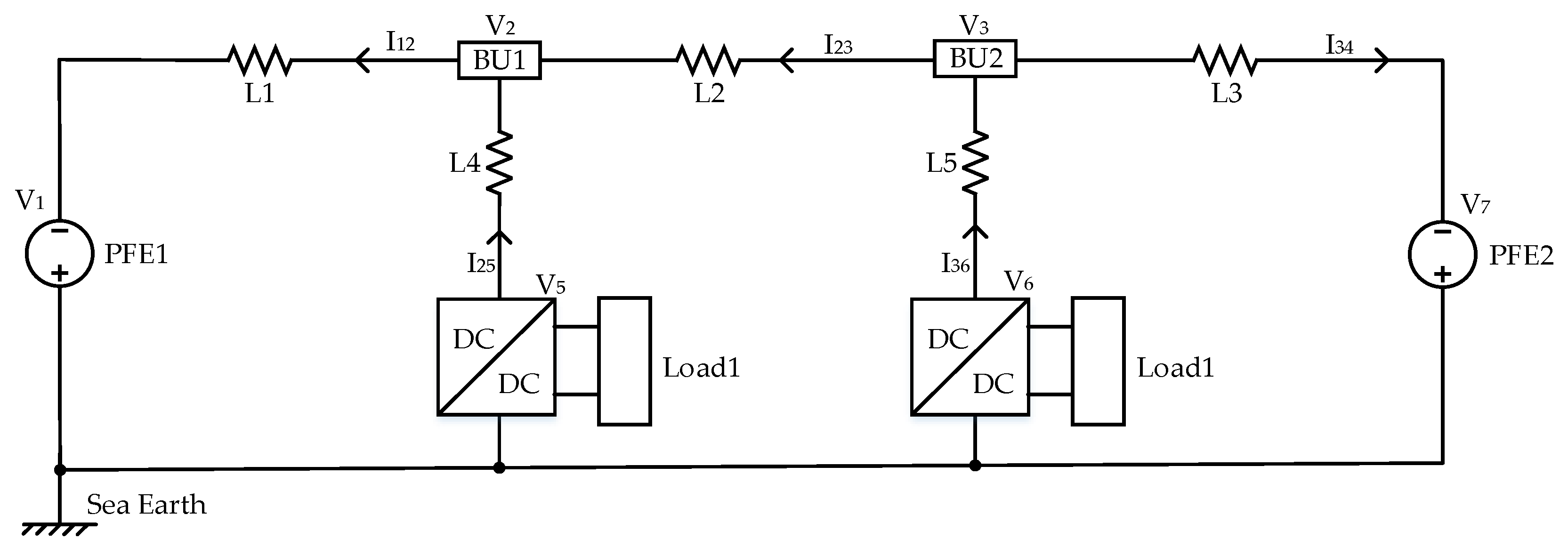
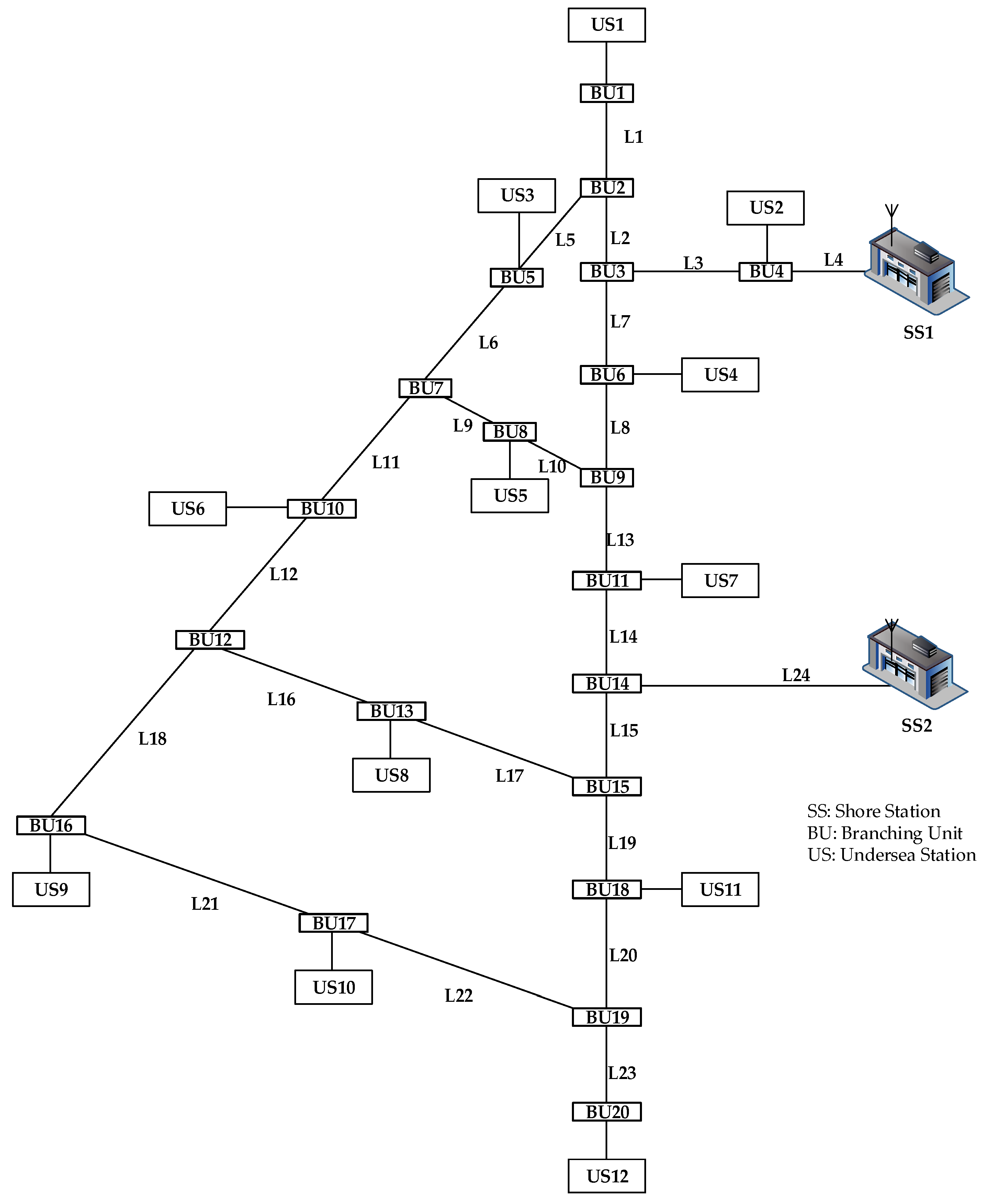
Figure 2 shows a CSO with one shore station and three undersea stations. L1–L3 are the backbone cables, and L4–L6 are the spur cables. The voltage of BU1 can be calculated by the function:
where
means the spur cable resistance between BU1 and US1.
The backbone cables have much wider seafloor distribution than the spur cables. In summer, the shallow seawater temperature can be up to 30 °C, but the deep-sea seawater temperature is only 2–4 °C. As the backbone cable resistances are various, parameter estimation is used to improve the power system model accuracy.
The cable resistances and the undersea stations’ voltage and current values have a linear relation, e.g., in
Figure 2,
where
means the unknown resistance of backbone cable L1. Other values can be obtained by measurements or Formula (3).
Selecting 15 measurements as a set of data, we used the least squares method for parameter estimation to obtain the resistances of backbone cables [
13].
The branch node voltage calculated in this step is not accurate. In order to ensure the accuracy of fault location, state estimation was used to improve the branch node data accuracy and to prepare for the fault location in the next step.
2.3. State Estimation of Key Nodes
For a power system of CSOs, the state data of branch nodes is essential for system state evaluation, system topology analysis, and fault location. The system state is estimated using the redundancy of real-time data to improve data accuracy and eliminate the error information caused by random noise [
14,
15].
In CSOs, only the input voltages and currents of undersea stations and the output voltages and currents of shore stations are available. This information can be used to build the power system measurement equation, which is expressed as:
where
z means measurement vector,
x means unknown state data,
ν represents the measurement error vector, and
h(
x) represents the relationship between the unknown state data and the measurement data. For a CSO with a specific topology, the relationship between the measured sensor data and the unknown state data can be obtained by Kirchhoff’s law.
Given the measurement vector
z, it is difficult to find an
x that makes the residual error zero. Therefore, we hope that
x can minimize the sum of squares of the weighted residual. At this point, the state estimation vector
x should satisfy the following objective function:
where
R−1 represents the weight, which is a diagonal matrix whose diagonal element is
, and
means the standard deviation of measurements. Usually, 15 consecutive measurements are used to calculate the standard deviation.
The essential state estimation method can reduce the influence of a large number of small measurement errors. However, the sensors of CSOs generate gross errors sometimes. In the power system, there are some leverage points, which may affect the state estimation results. In order to reduce the influence of gross errors and leverage points, a robust state estimation method is applied to calculate the unknown quantities and to reduce the influence of large measurement errors in the process of state estimation, using a weight factor to control the weights of different residuals [
16]. We use
k0 and
k1 to be the critical values. When a measurement residual is smaller than the critical value
k0, this measurement is considered to be trusted and its weight factor is 1; when a measurement residual is greater than
k0 and smaller than the critical value
k1, its weight factor is evaluated between (0,1); when a measurement residual is greater than the critical value
k1, it is considered to be an error and its weight factor is 0.
The voltage and current measurements can be regarded as normal distributions. The probabilities of measurement errors greater than 1.5
σ and 2
σ is 0.13 and 0.046, respectively. In the process of data pre-processing, when a sample’s gross error is greater than 2.41
σ, it is considered to be an error and should be removed. Considering the data pre-processing and the normal distribution, we set the critical value of
k0 to be 1.5
σ, and
k1 to be 2
σ. The weight factor can be expressed as:
The extremal function can be expressed as:
The objective function can be expressed as:
where
vi represents the residuals of the data and
a is a constant and independent of residuals.
According to Equation (5) and Kirchhoff’s law, the state estimation equations of a CSO power system can be established. The objective function of the robust state estimation can be established by Equation (9). The iterative calculation of Formula (5) is carried out until the objective function is satisfied. Then, the state data of the key nodes can be obtained.
2.4. Topology Identification Based on State Estimation
During steady state with no internal disturbances, the variation of measurement data indicates that the power system produces abnormalities and may have faults. Thus, it is necessary to determine whether the data variation represents failure in the CSO, and set relevant thresholds. Thresholds are usually set empirically.
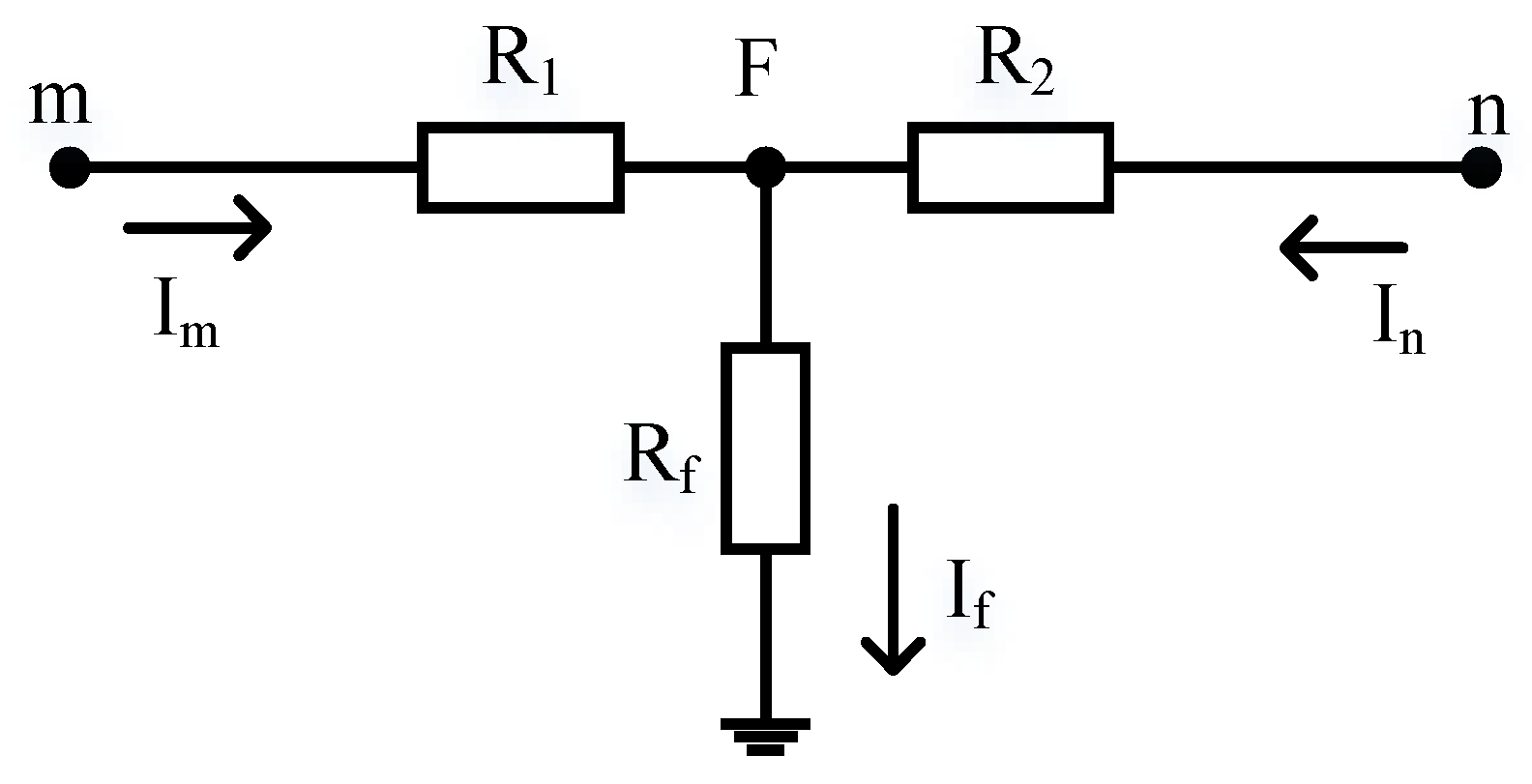
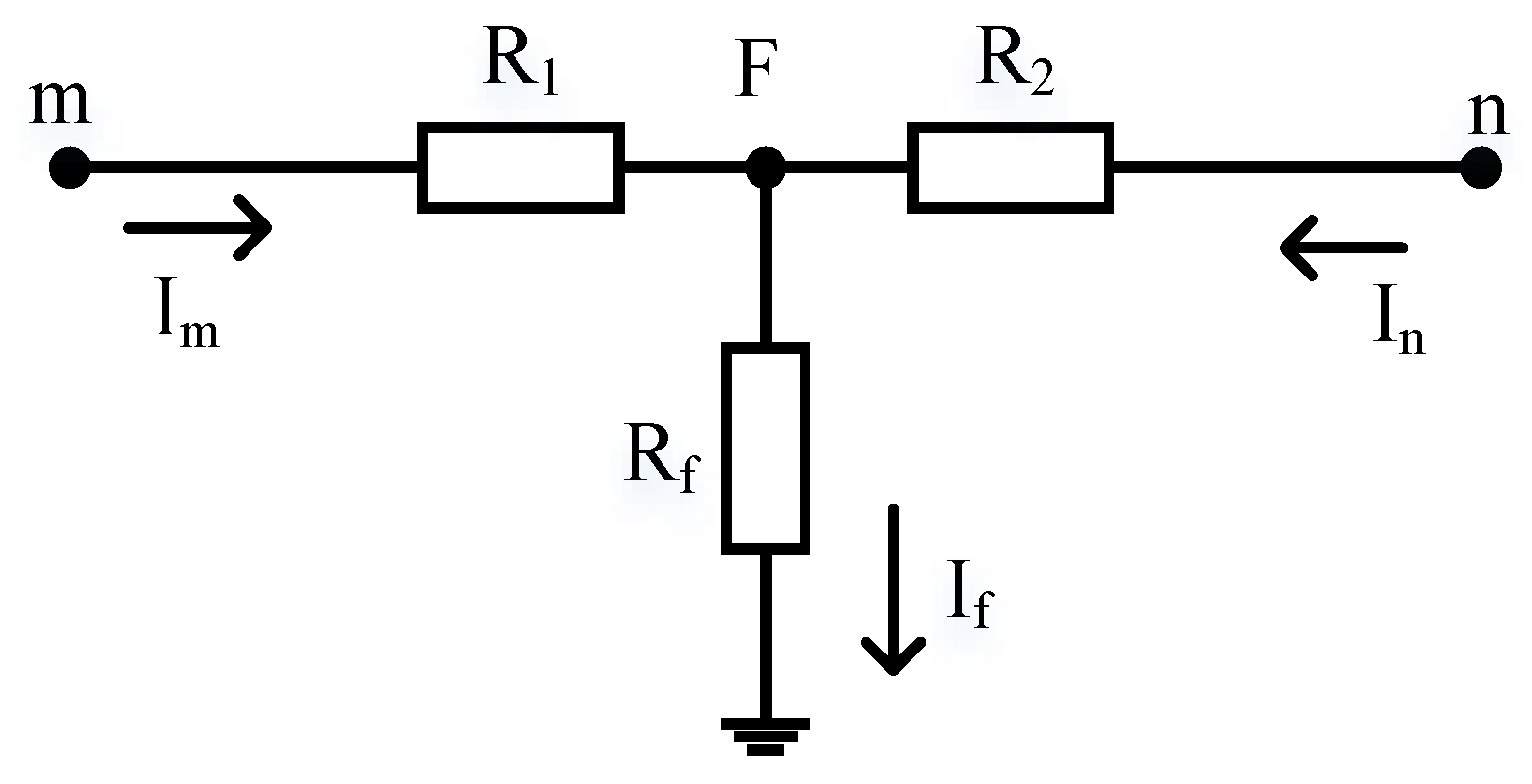
A CSO is segmented by the BUs. If there is a fault, each cable segment will be assumed to have a fault successively. As shown in
Figure 3, the current from the left of the fault is expressed by
Im, and the current from the right of the fault is expressed by
In. According to the measurements and the state estimation, we can judge whether the segment has a cable fault.
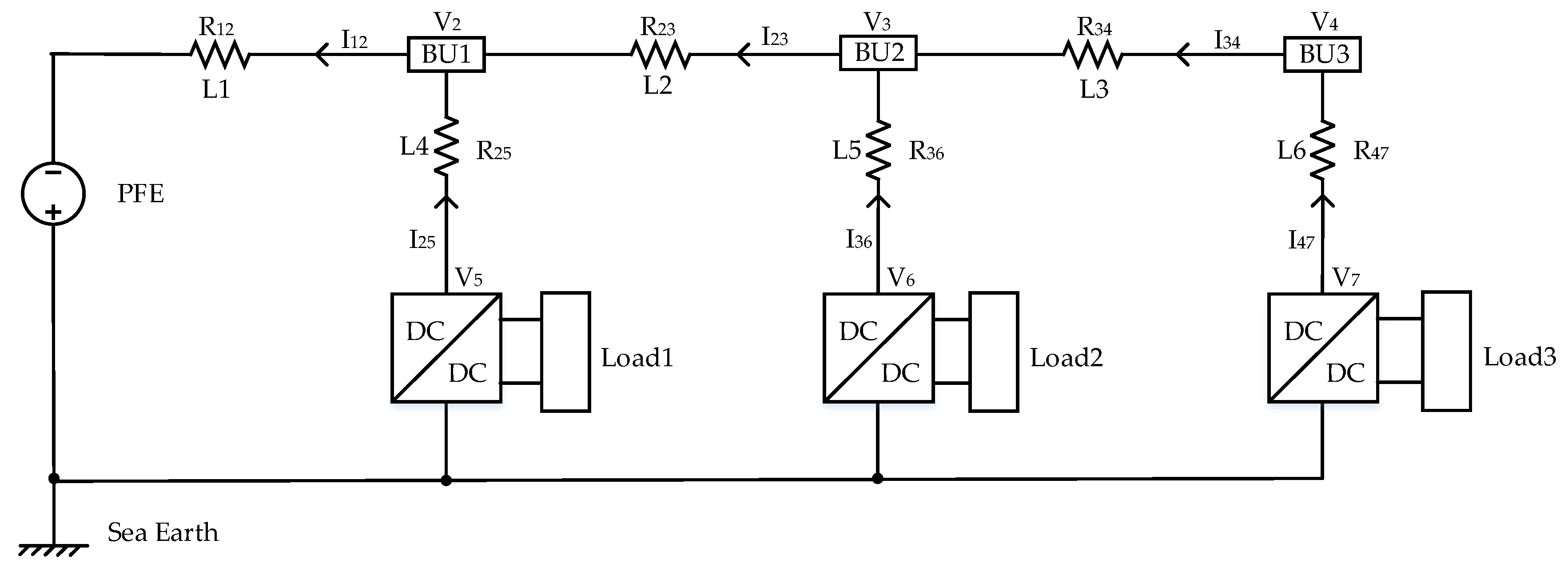
Using the structure shown in
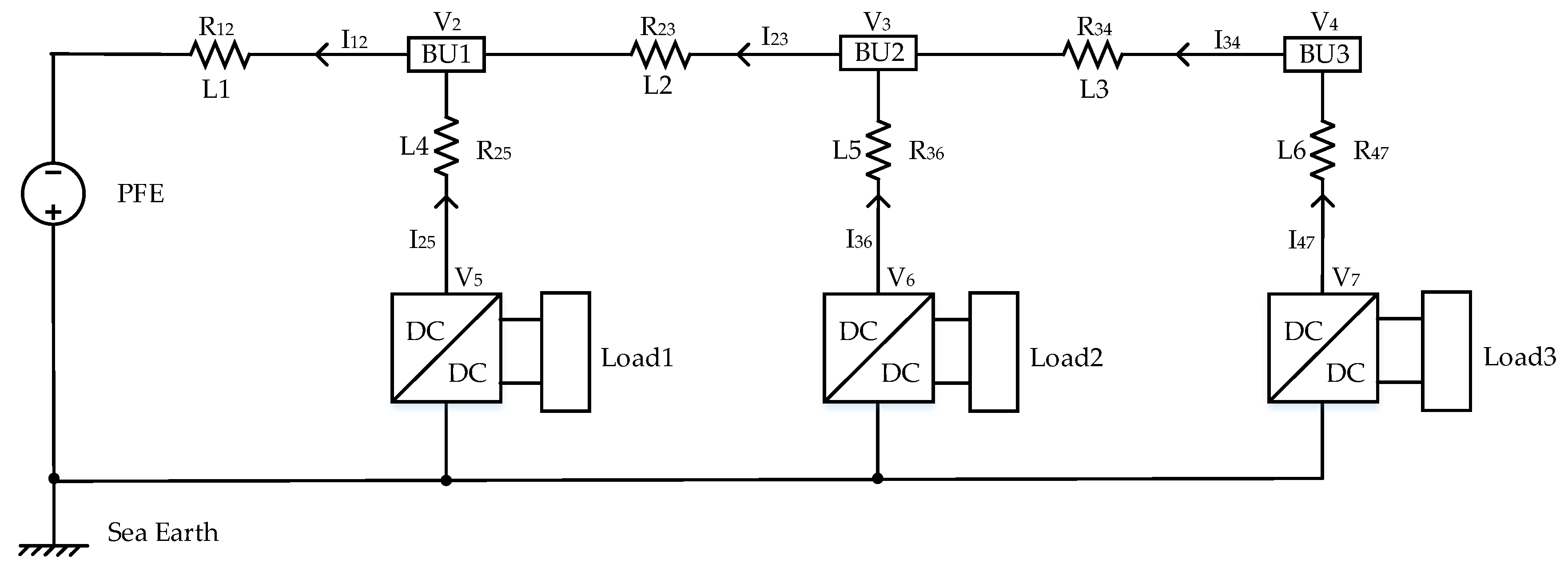
Figure 2 as an example, the submarine cable between BU1 and BU2 is assumed to have a sea ground fault.
The measurements include the output voltage
V1 and current
I12 of the shore station, the input voltages
V5,
V6,
V7 and currents
I25,
I36,
I47 of the three undersea stations. The voltages
V2,
V3, and
V4 at the BUs cannot be measured directly. When no fault occurs, the cable current between BU
i-1 and BU
i can be expressed as
. Thus, we use a judgment factor
η to determine whether the cable between the nodes
i and
i + 1 has a fault:
where
Im represents the current from the left of the fault and
In represents the current from the right of the fault. For the CSO in
Figure 2, using Kirchhoff’s law and the known quantities
I12,
I25,
I36, and
I47, the unknown quantities
Im and
In can be calculated.
If the assumed fault cable segment was on the left of the actual fault one, e.g., between SS and BU1, then i = 1, and Formula (10) is used to calculate η. As a matter of fact, this cable segment does not break down, so that . and , and the result is η = 1. When the assumed fault cable segment was on the right the actual fault one, e.g., between BU2 and BU3, and i = 3, the result is so that η = 0. When the assumed fault cable segment was the actual one, the result is 0 < η < 1, and the fault location can be calculated.
We can suppose the fault occurred on each cable segment in turn, and calculate η. When 0 < η < 1, it is considered that this cable segment has a fault, and then the new topology of the CSO considering the fault can be obtained.
2.5. Fault location Identification
The power system topology of a CSO is renewed when locating the fault section. In
Figure 3, m and n are two BUs; F is the fault point;
R1 and
R2 are the cable impedances;
Im and
In are currents from BU
m to the fault point and BU
n to fault point, respectively;
Rf and
If are the grounding impedance and the grounding current of the fault point respectively;
Rmn is the impedance between m and n. The relationships among them are as follows:
According to Equations (11) and (14), the fault impedance Rf and the parameter M can be obtained. If the distance between BUm and BUn is L, the distance from the fault point to the BUm is M·L.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}