Ship Loading Influence on the Slamming Impact of Typical Sections of an S-175 Container Ship



Abstract
1. Instruction
2. Theory and Mathematical Models
2.1. Arbitrary Lagrangian–Eulerian Algorithm
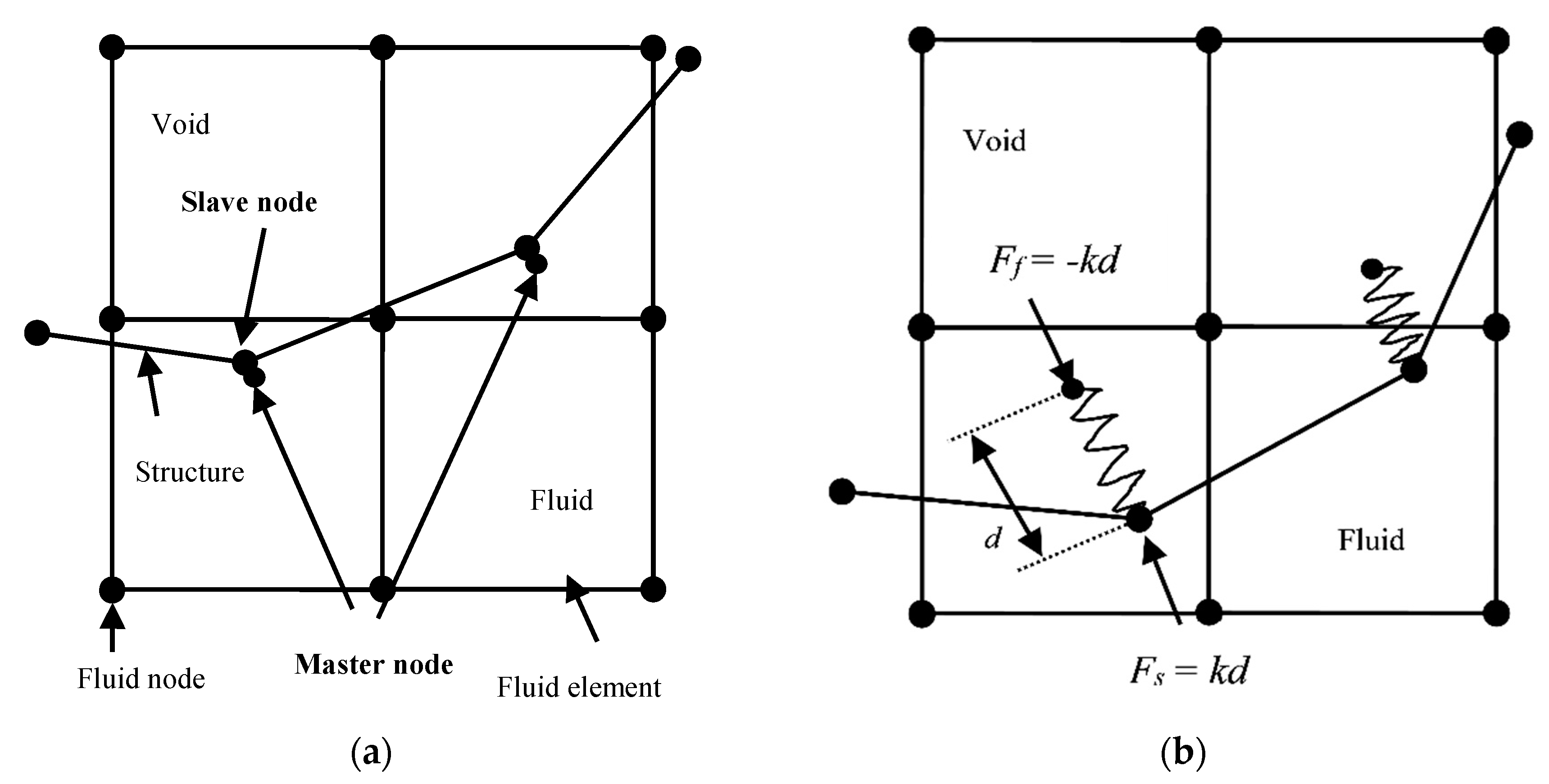
2.2. Penalty Function Coupling Method
2.3. Equation of State
3. Validation Study
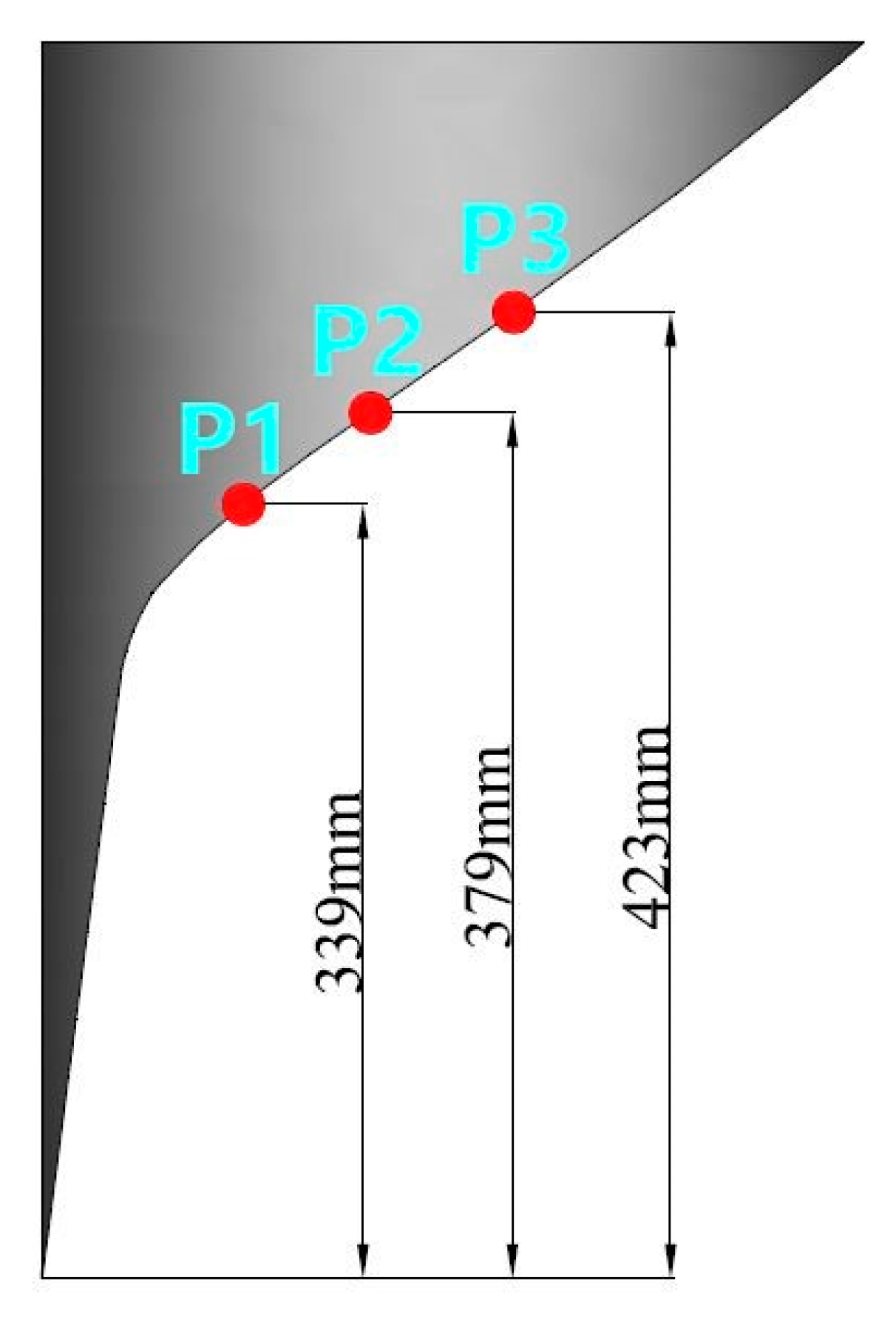
3.1. WILS JIP-II Hull Section Model
3.2. Validation of the Numerical Model
4. Numerical Results and Discussion
4.1. Ship Model and Initial Condition Setting
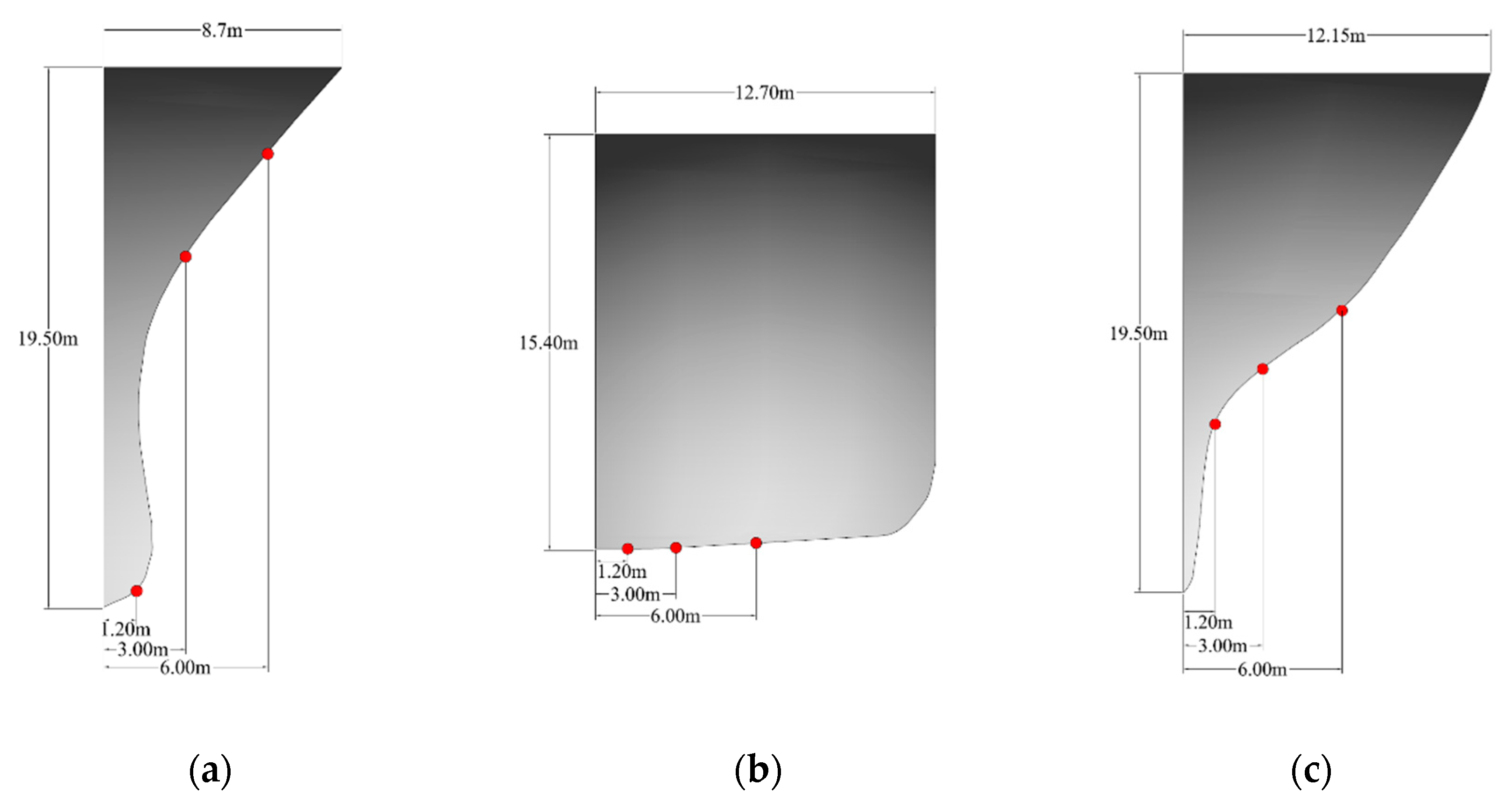
4.2. Bow Section
4.3. Parallel Middle-Body Section
4.4. Stern Section
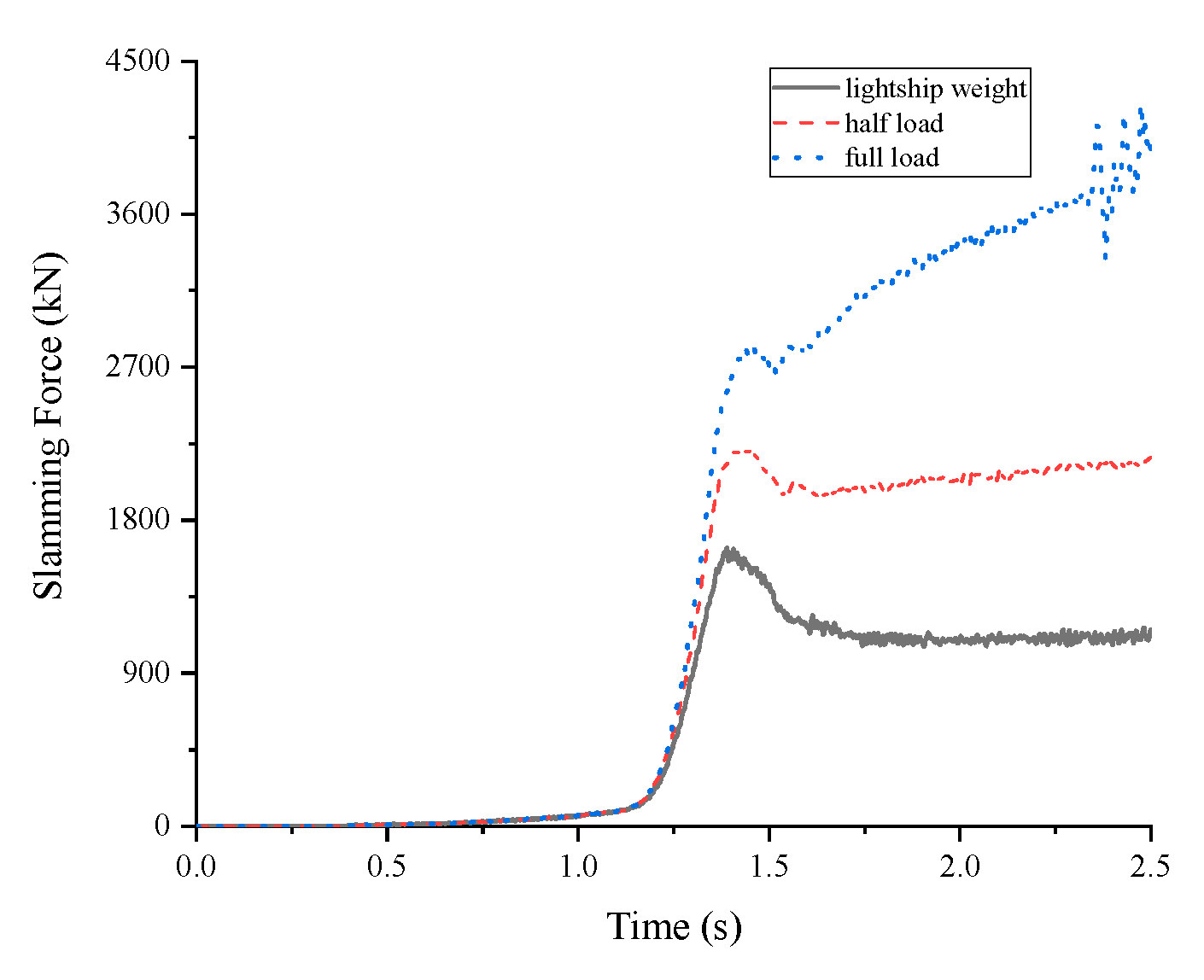
4.5. Loading Sensitivity Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wu, J. Study on the Hydroelastic Impact Test and Numerical Simulation of One Stiffened Wedge Body; Tianjin University: Tianjin, China, 2013. [Google Scholar]
- Southall, N.; Choi, S.; Lee, Y.; Hong, C.; Hirdaris, S.; White, N. Impact Analysis using CFD—A Comparative Study. In Proceedings of the Twenty-Fifth International Ocean and Polar Engineering Conference, Kona, HI, USA, 21–26 June 2015; pp. 692–698. [Google Scholar]
- Lee, Y.; Wang, Z.; White, N.; Hirdaris, S. Time domain analysis of springing and whipping responses acting on a large container ship. In Proceedings of the ASME 2011 30th International Conference on Ocean, Offshore and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; pp. 1–9. [Google Scholar]
- Von Karman, T. The Impact on Seaplane Floats during Landing; National Advisory Committee on Aeronautics: Washington, DC, USA, 1929; pp. 1–8.
- Wagner, H. Phenomena associated with impacts and sliding on liquid surfaces. Z. Angew. Math. Mech. 1932, 4, 193–215. [Google Scholar] [CrossRef]
- Zhao, R.; Faltinsen, O.; Aarsnes, J. Water entry of arbitrary two-dimensional sections with and without flow separation. In Proceedings of the 21st Symposium on Naval Hydrodynamics, Trondheim, Norway, 24–28 June 1996; pp. 408–423. [Google Scholar]
- Tveitnes, T.; Fairlie-Clarke, A.C.; Varyani, K. An experimental investigation into the constant velocity water entry of wedge-shaped sections. Ocean Eng. 2008, 35, 1463–1478. [Google Scholar] [CrossRef]
- Wang, J.; Claudio, L.; Odd, M.F. Experimental and numerical investigation of a freefall wedge vertically entering the water surface. Appl. Ocean Res. 2015, 51, 181–203. [Google Scholar] [CrossRef]
- Wang, H. Research on Ship Slamming Loading and Local Structure Dynamic Response; China Ship Scientific Research Center: Wuxi, China, 2010. [Google Scholar]
- Luo, H.; Wang, H.; Soares, C.G. Numerical and experimental study of hydrodynamic impact and elastic response of one free-drop wedge with stiffened panels. Ocean Eng. 2012, 40, 1–14. [Google Scholar] [CrossRef]
- Mohammad, J.; Maurizio, P. Water entry of compliant slender bodies: Theory and experiments. Int. J. Mech. Sci. 2018, 149, 514–529. [Google Scholar]
- Wang, W.; Huang, Y.; Wang, Y.; Zhai, G.; Huang, Y. Effect of status parameters for elastic wedge on dynamic performance of water-entry. J. Ship Mech. 2014, 18, 1320–1330. [Google Scholar]
- Aquelet, N.; Souli, M.; Olovsson, L. Euler-Lagrange coupling with damping effects: Application to slamming problems. Comput. Methods Appl. Mech. Eng. 2006, 195, 110–132. [Google Scholar] [CrossRef]
- Yang, H.; Sun, L.; Gong, X.; Yao, X. 3D numerical simulation of slamming load character for water entry of an elastic structure. J. Vib. Shock 2014, 33, 28–34. [Google Scholar]
- Zhu, X.; Odd, M.F.; Hu, C. Water Entry and exit of a horizontal circular cylinder. J. Offshore Mech. Arct. Eng. 2007, 129, 253–264. [Google Scholar] [CrossRef]
- Watanabe, I.; Ueno, M.; Sawada, H. Effects of bow flare shape to the wave loads of a container ship. J Soc. Nav. Arch. Jpn. 1989, 166, 259–266. [Google Scholar] [CrossRef]
- Wang, H.; Gu, X.; Shen, J. The Equivalent Design Pressure of Ship Frame Structures under Bottom Slamming Loads; Paper No. 58020; OMAE: Estoril, Portugal, 2008. [Google Scholar]
- Hermundstad, O.A.; Moan, T. Numerical and experimental analysis of bow flare slamming on a Ro-Ro vessel in regular oblique waves. J. Mar. Sci. Technol. 2005, 10, 105–122. [Google Scholar] [CrossRef]
- Xu, N.; Shen, J.; Chen, R. Model tests of S-175 container ship on wave loads and comparisons between experiments and calculations of linear strip theory. Shipbuild. China 1984, 2, 69–82. (In Chinese) [Google Scholar]
- Ramos, J.; Incecik, A.; Guedes Soares, C. Experimental study of slam-induced stresses in a container ship. Mar. Struct. 2000, 13, 25–51. [Google Scholar] [CrossRef]
- Fonseca, N.; Guedes Soares, C. Experimental investigation of the nonlinear effects on the statistics of vertical motions and loads of a container ship in irregular waves. J. Ship Res. 2004, 148, 148–167. [Google Scholar]
- He, G.; Zhang, Z.; Wu, Y.; Jing, P. Simulation of the water-entry slamming of an S-175 container ship at critical sections. J. Harbin Eng. Univ. 2019, 40, 1058–1064. (In Chinese) [Google Scholar]
- Hirdaris, S.; Bai, W.; Dessi, D.; Ergin, A.; Gue, X.; Hermundstad, O.; Huijsmans, R.; Iijima, K.; Nielsen, U.; Parunov, J.; et al. Loads for use in the design of ships and offshore structures. Ocean Eng. 2014, 78, 131–174. [Google Scholar] [CrossRef]
- Hirdaris, S.; Bakkers, N.; White, N.; Temarel, P. Service Factor Assessment of a Great Lakes Bulk Carrier Incorporating the Effects of Hydroelasticity. Mar. Technol. 2009, 46, 116–121. [Google Scholar]
- Hirdaris, S.; Temarel, P. Hydroelasticity of ships: Recent advances and future trends. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2009, 223, 305–330. [Google Scholar] [CrossRef]
- Ma, Q.; Yang, K. Solution and Research on Light weight Control of 4700 TEU Container Ship. Ship Eng. 2016, 38, 23–28. [Google Scholar]
- Li, X.; Zhang, C.; Wang, X.; Yan, H. Numerical study on the effect of equations of state of water on under water explosion. Eng. Mech. 2014, 31, 46–52. [Google Scholar]
- Hong, S.; Kim, K.; Hwang, S. Comparative study of water-impact problem for ship section and wedge drops. Int. J. Offshore Polar Eng. 2017, 27, 123–134. [Google Scholar] [CrossRef]
- He, G.; Chen, L.; Wang, J. Strongly-nonlinear simulation of ship motions in head waves. J. Harbin Inst. Technol. 2017, 49, 142–148. (In Chinese) [Google Scholar]
- LSTC. LS-DYNA Keyword User’s Manual; LSTC: Livermore, CA, USA, 2017. [Google Scholar]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | C0 | C1 | C2 | C3 | C4 | C5 | C6 | E0 | V0 |
|---|---|---|---|---|---|---|---|---|---|
| Air | 0 | 0 | 0 | 0 | 0.4 | 0.4 | 0 | 2.5 × 105 | 0 |
| Water | 0 | 2.2 × 109 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Parameter | Value |
|---|---|
| Model | Model II |
| General dimension (mm) | 359 × 541 |
| Parameter | Value |
|---|---|
| Length (m) | 175 |
| Breadth (m) | 25.4 |
| Depth (m) | 15.4 |
| Draught (m) | 9.5 |
| Displacement (m3) | 24,742 |
| Lengthways center of gravity (m) | 84.97 (from after-perpendicular) |
| Transverse center of gravity (m) | 0 (from midcourt line) |
| Vertical center of gravity (m) | 8.5 (from keel strake) |
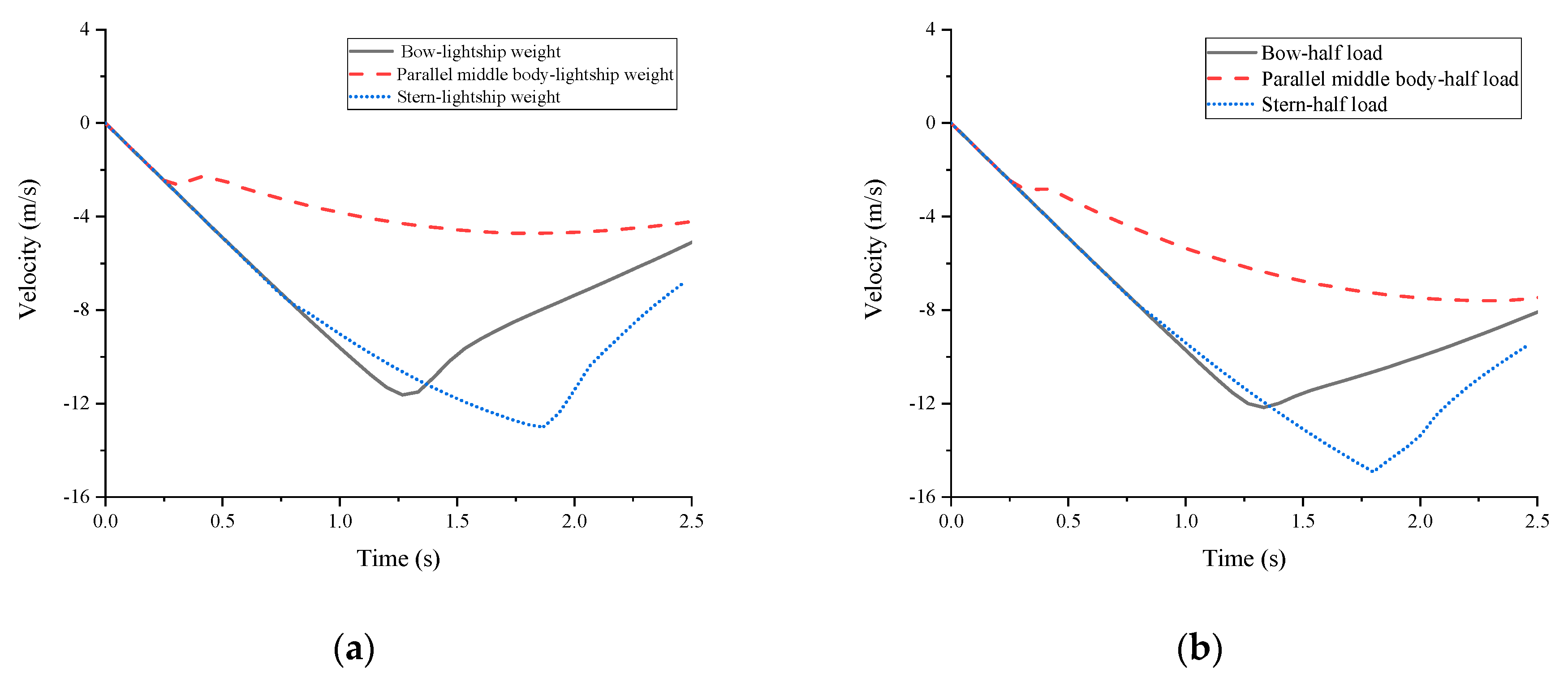
| Model | Velocity (m/s) |
|---|---|
| Bow | −7.3 |
| Parallel middle body | −2.7 |
| Stern | −3.8 |
| Material | Density (kg/m3) | Young’s modulus (Pa) | Poisson’s ratio |
| Steel | 7850 | 2.16 × 1011 | 0.3 |
| Material | Density (kg/m3) | Dynamic viscosity (Pa·s) | |
| Air | 1.25 | 1.75 × 10-5 | |
| Water | 998 | 8.68 × 10-4 | |
| Section | Loading case | Mass (kg) |
|---|---|---|
| Bow | Lightship weight | 2809 |
| Half load | 5618 | |
| Full load | 11,236 | |
| Parallel middle body | Lightship weight | 9687 |
| Half load | 19,374 | |
| Full load | 38,748 | |
| Stern | Lightship weight | 3858 |
| Half load | 7716 | |
| Full load | 15,432 |
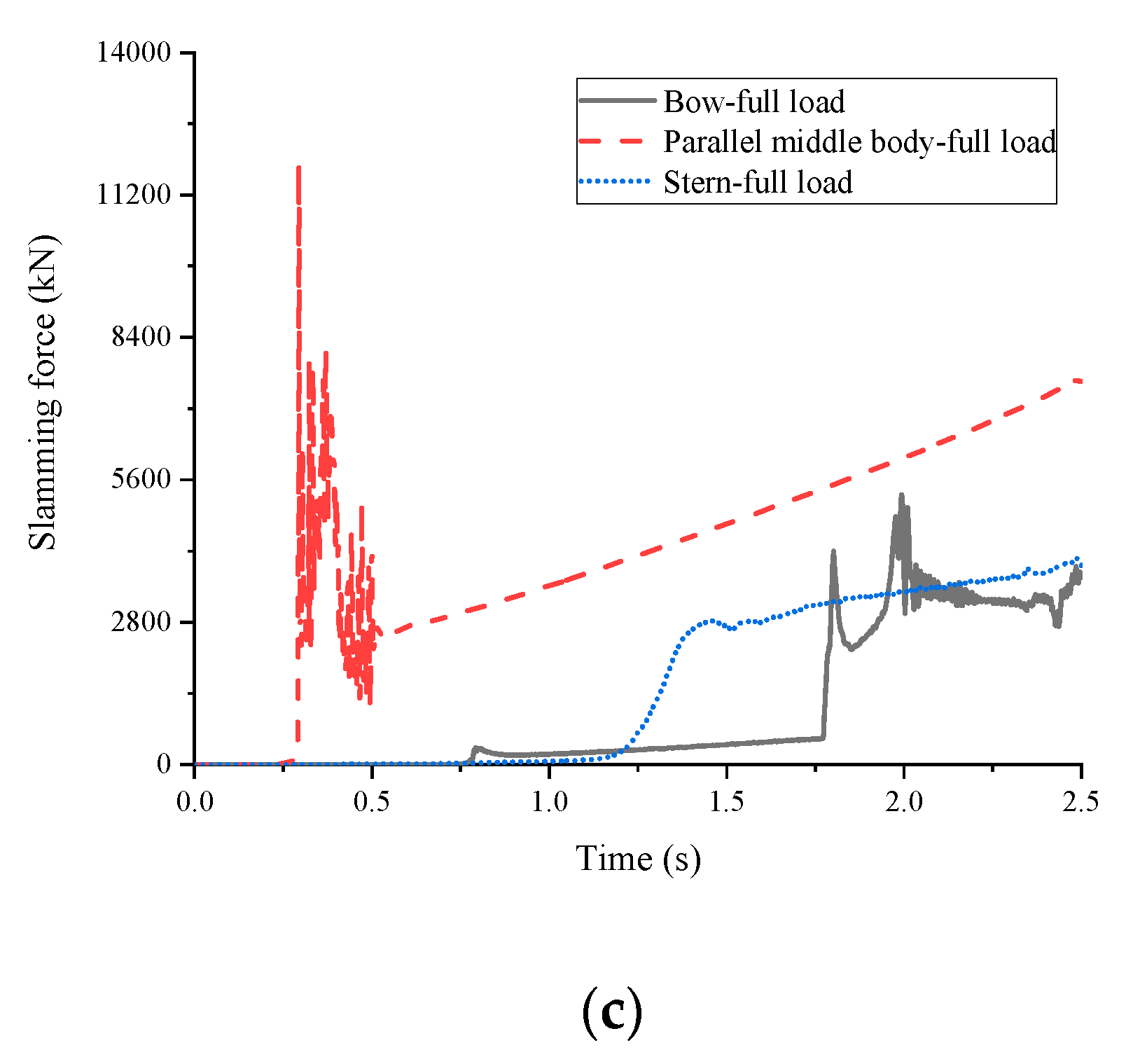
| Section | Loading Case | Peak Value (kN) | Growth Rate (%) |
|---|---|---|---|
| Bow | Lightship weight | 3507 | 0 |
| Half load | 4810 | 37.15 | |
| Full load | 7159 | 104.13 | |
| Parallel middle body | Lightship weight | 12,226 | 0 |
| Half load | 12,408 | 1.49 | |
| Full load | 11796 | −3.52 | |
| Stern | Lightship weight | 16,367 | 0 |
| Half load | 24,921 | 52.26 | |
| Full load | 59,840 | 265.61 |
| Section | Loading Case | Peak Value (kN) | Growth Rate (%) |
|---|---|---|---|
| Bow | Lightship weight | 453 | 0 |
| Half load | 885 | 95.36 | |
| Full load | 1757 | 287.86 | |
| Parallel middle body | Lightship weight | 2662 | 0 |
| Half load | 2647 | −0.56 | |
| Full load | 2821 | 5.97 | |
| Stern | Lightship weight | 204 | 0 |
| Half load | 245 | 20.10 | |
| Full load | 281 | 37.75 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, G.; Xie, B.; Wang, W.; Liu, S.; Jing, P. Ship Loading Influence on the Slamming Impact of Typical Sections of an S-175 Container Ship. J. Mar. Sci. Eng. 2020, 8, 163. https://doi.org/10.3390/jmse8030163
He G, Xie B, Wang W, Liu S, Jing P. Ship Loading Influence on the Slamming Impact of Typical Sections of an S-175 Container Ship. Journal of Marine Science and Engineering. 2020; 8(3):163. https://doi.org/10.3390/jmse8030163
Chicago/Turabian StyleHe, Guanghua, Binyang Xie, Wei Wang, Shuang Liu, and Penglin Jing. 2020. "Ship Loading Influence on the Slamming Impact of Typical Sections of an S-175 Container Ship" Journal of Marine Science and Engineering 8, no. 3: 163. https://doi.org/10.3390/jmse8030163
APA StyleHe, G., Xie, B., Wang, W., Liu, S., & Jing, P. (2020). Ship Loading Influence on the Slamming Impact of Typical Sections of an S-175 Container Ship. Journal of Marine Science and Engineering, 8(3), 163. https://doi.org/10.3390/jmse8030163