Extraction Method of Offshore Mariculture Area under Weak Signal based on Multisource Feature Fusion

 , , ,
, , ,
Abstract
1. Introduction
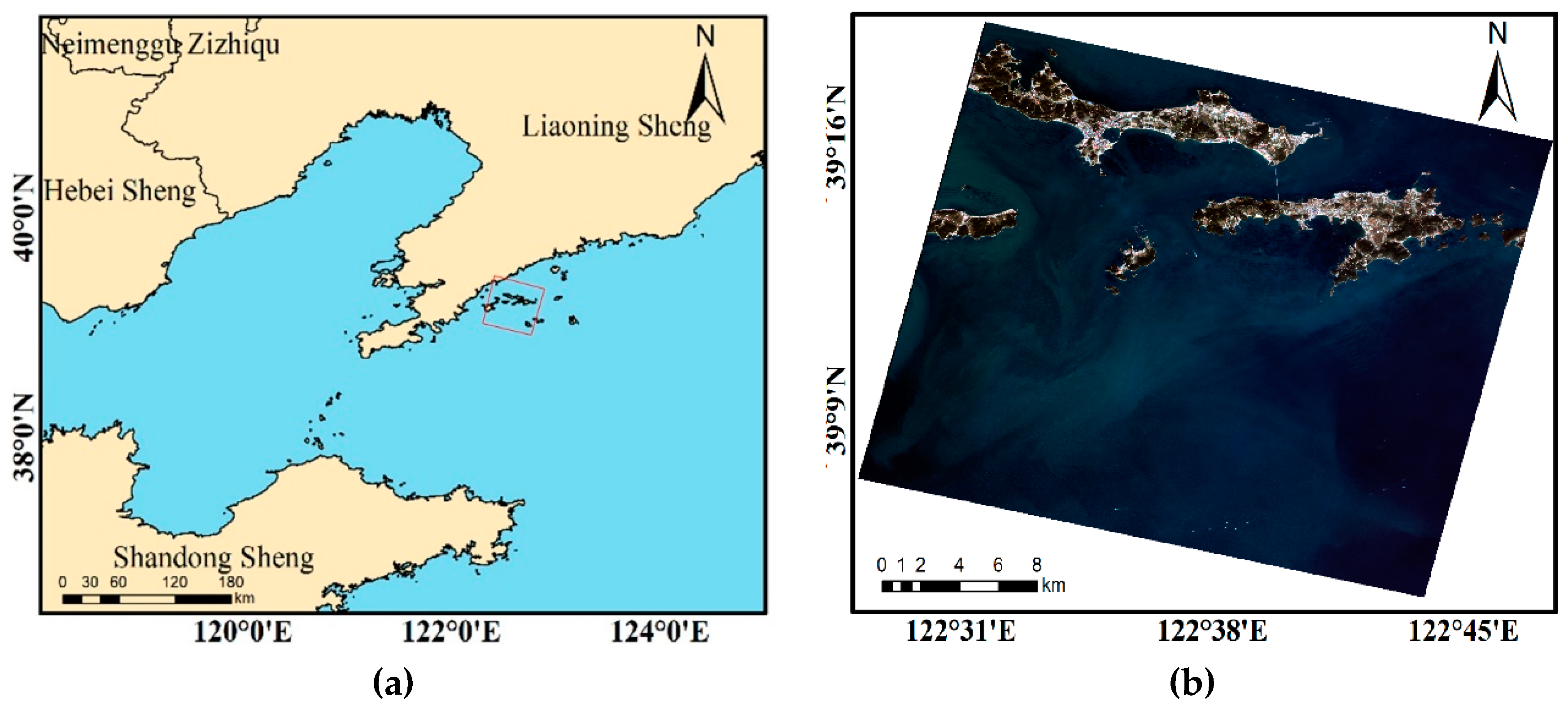
2. Research Area and Data Source
3. Method
3.1. Band Feature Combination
3.2. Preprocessing
3.2.1. Image Fusion
3.2.2. Data Stretching and Normalization
3.2.3. Image Cutting
3.2.4. Data Augmentation
- (1)
- Rotation
- (2)
- In remote sensing imaging, the shooting angles of the objects are different, and all objects present different states in the image. Therefore, the image is randomly rotated by 0°, 90°, 180°, and 270° after cutting to expand the sample dataset.
- (3)
- Mirroring
- (4)
- In order to expand the training sample, we will randomly mirror the image horizontally, vertically, or in both directions.
- (5)
- Adding Gaussian noise.
3.3. Model Training
- (1)
- Define the variable loss-A and its initial value before network training. The initial value used in this experiment was 1.8.
- (2)
- After 20 rounds of training, calculate the average loss-b of the 20 rounds of training (loss-B).
- (3)
- From the 20 rounds of training data, 25% of the data were randomly selected as a temporary test set. Calculate the error of network to temporary test set (loss-C).
- (4)
- If both loss-C and loss-B are less than loss-A, save the model and change the value of loss-A to loss-C. If the appeal conditions are not tenable, no change will be made.
- (5)
- After another 20 rounds of training, return to step 2.
4. Results and Discussion
4.1. Environment Parameter Setting
4.2. Experiment Setup
4.3. Results
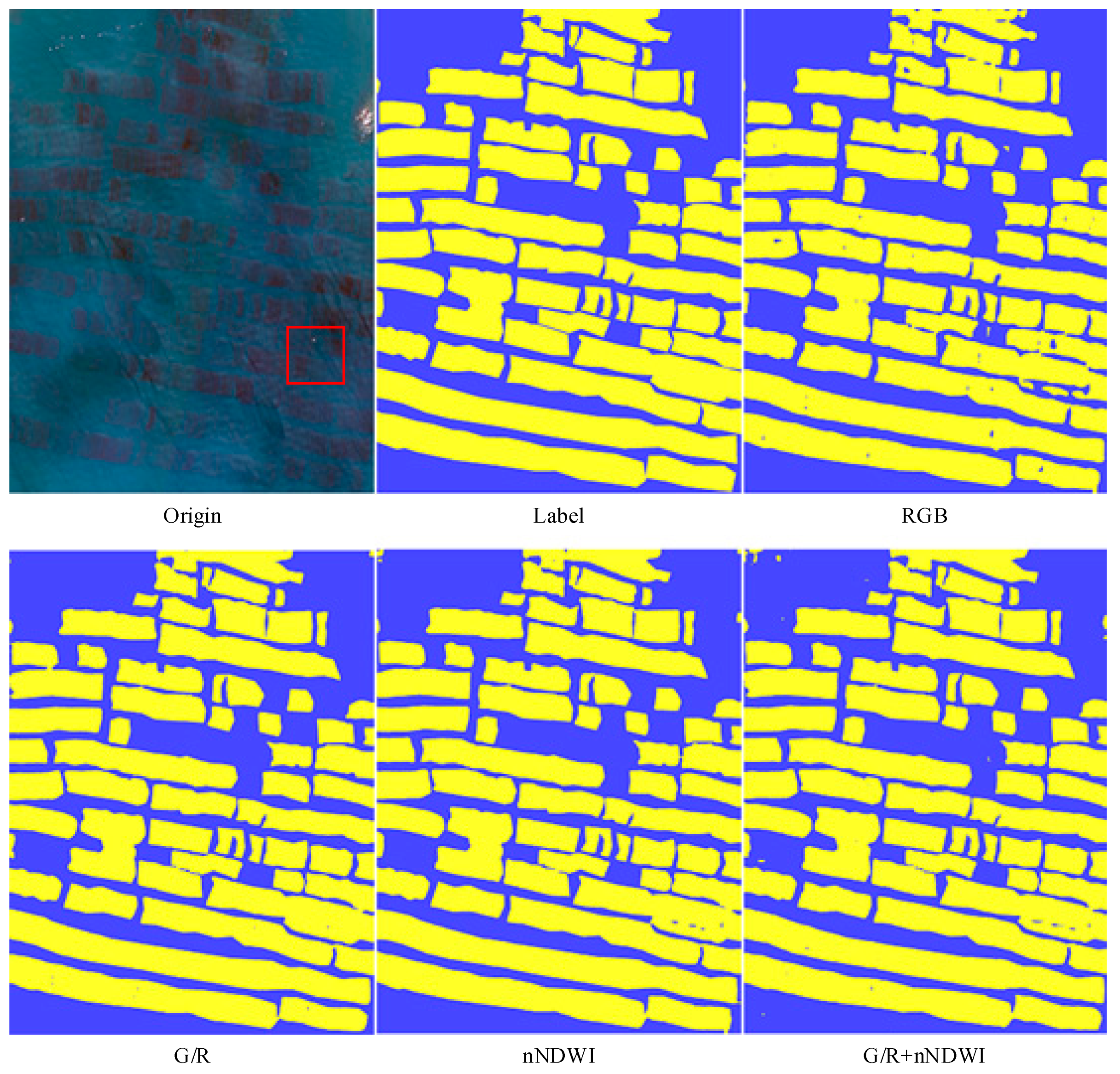
4.3.1. Results under Uniform Distribution of Strong and Weak Signals
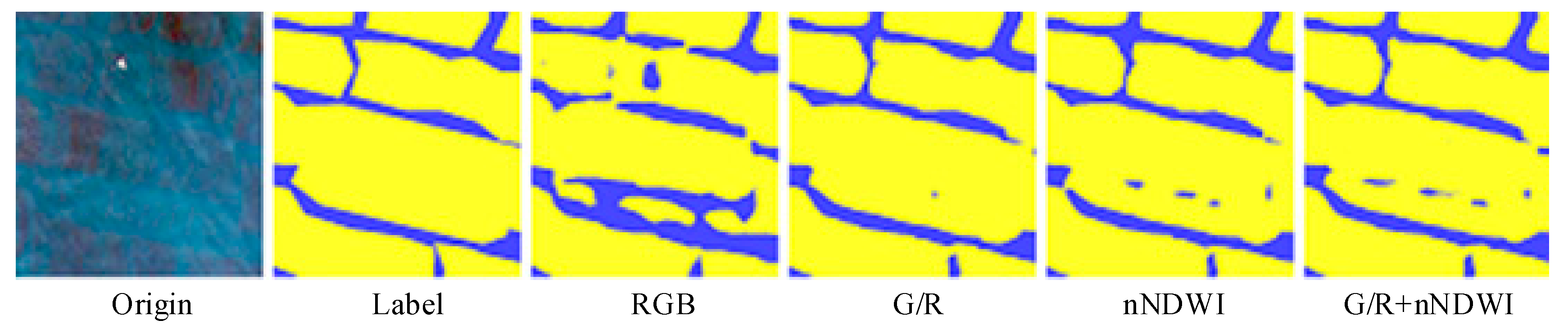
4.3.2. Results under Extremely Weak Signal
5. Conclusions
- 1)
- Under the condition of uniform distribution of strong and weak signals, the G/R characteristic is superior. The semantic segmentation method based on this feature demonstrated that MPA is 2.32% higher than the RGB band feature, and OA is higher by 2.22%. In addition, the Kappa coefficient is higher by 0.04%, and the overall classification accuracy is 98.84%.
- 2)
- Under the condition of extremely weak signal, the multisource feature method MPA based on the combination of G/R and nNDWI is 10.76% higher than RGB, and OA is 16.51% higher. Moreover, the Kappa coefficient is 0.34% higher, and the overall classification accuracy is 82.02%. Under the condition of extremely weak signal, the G/R features highlight the target, and nNDWI suppresses the noise.
- 3)
- The DeepLabv3 semantic segmentation method based on the multisource features of nNDWI and G/R ratio is an effective method for extracting the information of weak signal marine culture areas. It provides technical support for environmental monitoring and safety assurance of marine environments.
Author Contributions
Funding
Conflicts of Interest
References
- McCauley, S.; Goetz, S.J. Mapping residential density patterns using multi-temporal Landsat data and a decision-tree classifier. Int. J. Remote Sens 2004, 25, 1077–1094. [Google Scholar] [CrossRef]
- Wang, H.; Suh, J.W.; Das, S.R. Hippocampus segmentation using a stable maximum likelihood classifier ensemble algorithm. In Proceedings of the 8th IEEE International Symposium on Biomedical Imaging: From Nano to Macro, Chicago, IL, USA, 30 March–2 April 2011. [Google Scholar]
- Shahrokh Esfahani, M.; Knight, J.; Zollanvari, A. Classifier design given an uncertainty class of feature distributions via regularized maximum likelihood and the incorporation of biological pathway knowledge in steady-state phenotype classification. Pattern Recognit. 2013, 46, 2783–2797. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Toth, D.; Aach, T. Improved minimum distance classification with Gaussian outlier detection for industrial inspection. In Proceedings of the 11th International Conference on Image Analysis and Processing, Palermo, Italy, 26–28 September 2001. [Google Scholar]
- Liu, Z. Minimum distance texture classification of SAR images in contourlet domain. In Proceedings of the International Conference on Computer Science and Software Engineering, Hubei, China, 12–14 December 2008. [Google Scholar]
- Fletcher, N.D.; Evans, A.N. Minimum distance texture classification of SAR images using wavelet packets. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002. [Google Scholar]
- Belloni, C.; Aouf, N.; Caillec, J.L.; Merlet, T. Comparison of Descriptors for SAR ATR. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Merlet, Boston, MA, USA, 22–26 April 2019; pp. 1–6. [Google Scholar]
- Kechagias-Stamatis, O.; Aouf, N.; Nam, D. Multi-Modal Automatic Target Recognition for Anti-Ship Missiles with Imaging Infrared Capabilities. In Proceedings of the IEEE Sensor Signal Processing for Defence Conference (SSPD), London, UK, 6–7 December 2017. [Google Scholar]
- Rumelhart, D.E.; Hintont, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 2004, 323, 533–536. [Google Scholar] [CrossRef]
- Sezer, O.B.; Ozbayoglu, A.M.; Dogdu, E. An artificial neural network-based stock trading system using technical analysis and Big Data Framework. In Proceedings of the SouthEast Conference, Kennesaw, GA, USA, 13–15 April 2017. [Google Scholar]
- Smola, A.J.; Schölkopf, B. On a Kernel-Based Method for Pattern Recognition, Regression, Approximation, and Operator Inversion. Algorithmica 1998, 22, 211–231. [Google Scholar] [CrossRef]
- Hinton, G.E. Reducing the Dimensionality of Data with Neural Networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [PubMed]
- Lecun, Y.; Bottou, L.; Bengio, Y. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Kechagias-Stamatis, O.; Aouf, N. Fusing deep learning and sparse coding for SAR ATR. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 785–797. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. 2014, 39, 640–651. [Google Scholar]
- Chen, L.C.; Papandreou, G.; Schroff, F. Rethinking Atrous Convolution for Semantic Image Segmentation. arXiv 2017, arXiv:1706.05587. [Google Scholar]
- Zhang, Z.; Huang, J.; Jiang, T. Semantic segmentation of very high-resolution remote sensing image based on multiple band combinations and patchwise scene analysis. JARS 2020, 14, 01620. [Google Scholar] [CrossRef]
- Zhao, H.; Shi, J.; Qi, X. Pyramid Scene Parsing Network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. MICCAI 2015, 234–241. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- Lin, G.; Milan, A.; Shen, C. RefineNet: Multi-path Refinement Networks for High-Resolution Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Way of Imaging | Push Broom Scanning Imaging Mode | |
|---|---|---|
| Sensor | Panchromatic band | Multispectral |
| Resolution | 0.81 m | 3.24 m |
| Wavelength | 450–900 nm | Blue: 450–520 nm |
| Green: 520–590 nm | ||
| Red: 630–690 nm | ||
| NIR: 770–900 nm | ||
| Layer Name | 50-layer |
|---|---|
| Conv1 | 7 × 7, 64, stride2 |
| 3 × 3 max pool, stride2 | |
| Block1 | |
| Block2 | |
| Block3 | |
| Block4 |
| Running Environment | Training Parameters | ||||
|---|---|---|---|---|---|
| Hardware Environment | Software Environment | Image_Size | 600 | ||
| CPU | i9-9900k | Operating system | Centos7 | Classes | 2 |
| Learning_rate | 1e-4 | ||||
| Batch_norm_epsion | 1e-5 | ||||
| Batch_norm_decay | 0.9997 | ||||
| GPU | P100 | Programming language and deep learning library | Python3.7 Tensorflow1.14 | Resnet_model | resnet_v2_50 |
| Output_stride | 16 | ||||
| Batch_size | 8 | ||||
| Epoches | 25000 | ||||
| Group | Group 1 | Group 2 | Group 3 | Group 4 |
|---|---|---|---|---|
| Band combination | R, G, B | G/R | nNDWI | G/R, nNDWI |
| Parameter Name | Group 1 | Group 2 | Group 3 | Group 4 |
|---|---|---|---|---|
| Background | 0.9448 | 0.9815 | 0.9844 1 | 0.9813 |
| Target | 0.9841 | 0.9938 1 | 0.9899 | 0.9882 |
| MPA | 0.9645 | 0.9877 1 | 0.9872 | 0.9848 |
| OA | 0.9662 | 0.9884 1 | 0.9875 | 0.9852 |
| Kappa | 0.9317 | 0.9764 1 | 0.9746 | 0.9699 |
| Time | 10 h 32 min | 10 h 13 min | 10 h 7 min | 10 h 26 min |
| Parameter Name | Group 1 | Group 2 | Group 3 | Group 4 |
|---|---|---|---|---|
| Background | 0.8947 | 0.9244 | 0.5470 | 0.9624 1 |
| Target | 0.6004 | 0.7436 | 0.8067 1 | 0.7479 |
| MPA | 0.7475 | 0.8340 | 0.6769 | 0.8551 1 |
| OA | 0.6551 | 0.8073 | 0.5877 | 0.8202 1 |
| Kappa | 0.3029 | 0.6126 | 0.1846 | 0.6385 1 |
| Time | 10 h 32 min | 10 h 13 min | 10 h 7 min | 10 h 26 min |
| Parameter Name | Deeplabv3 | SVM |
|---|---|---|
| Background | 0.9448 1 | 0.7747 |
| Target | 0.9841 1 | 0.7538 |
| MPA | 0.9645 1 | 0.7642 |
| OA | 0.9662 1 | 0.7614 |
| Kappa | 0.9317 1 | 0.5064 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Jiang, T.; Zhang, Z.; Sui, B.; Pan, X.; Zhang, L.; Zhang, J. Extraction Method of Offshore Mariculture Area under Weak Signal based on Multisource Feature Fusion. J. Mar. Sci. Eng. 2020, 8, 99. https://doi.org/10.3390/jmse8020099
Liu C, Jiang T, Zhang Z, Sui B, Pan X, Zhang L, Zhang J. Extraction Method of Offshore Mariculture Area under Weak Signal based on Multisource Feature Fusion. Journal of Marine Science and Engineering. 2020; 8(2):99. https://doi.org/10.3390/jmse8020099
Chicago/Turabian StyleLiu, Chenxi, Tao Jiang, Zhen Zhang, Baikai Sui, Xinliang Pan, Linjing Zhang, and Jingyu Zhang. 2020. "Extraction Method of Offshore Mariculture Area under Weak Signal based on Multisource Feature Fusion" Journal of Marine Science and Engineering 8, no. 2: 99. https://doi.org/10.3390/jmse8020099
APA StyleLiu, C., Jiang, T., Zhang, Z., Sui, B., Pan, X., Zhang, L., & Zhang, J. (2020). Extraction Method of Offshore Mariculture Area under Weak Signal based on Multisource Feature Fusion. Journal of Marine Science and Engineering, 8(2), 99. https://doi.org/10.3390/jmse8020099