Hybrid Partition-Based Patrolling Scheme for Maritime Area Patrol with Multiple Cooperative Unmanned Surface Vehicles


Abstract
1. Introduction
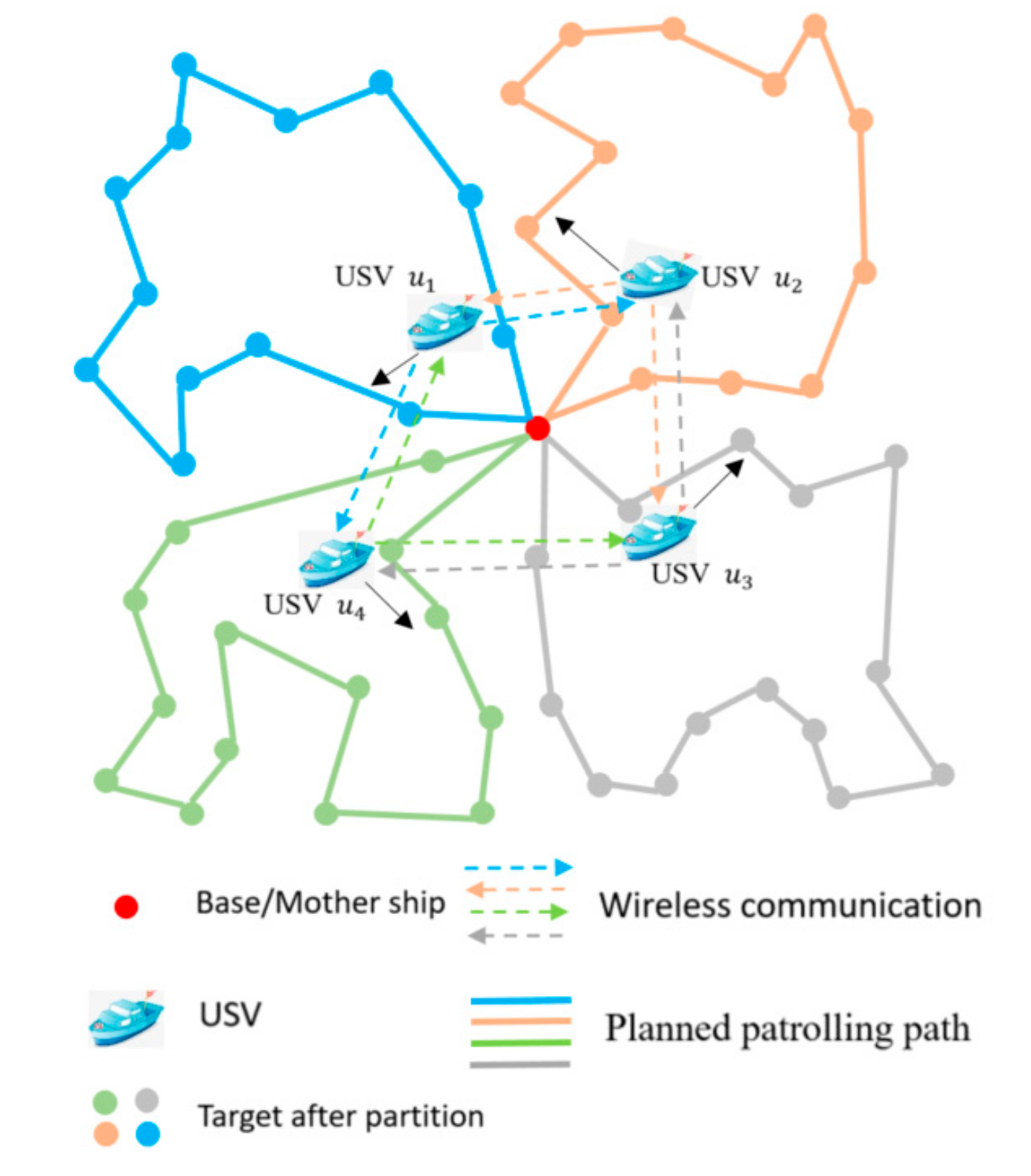
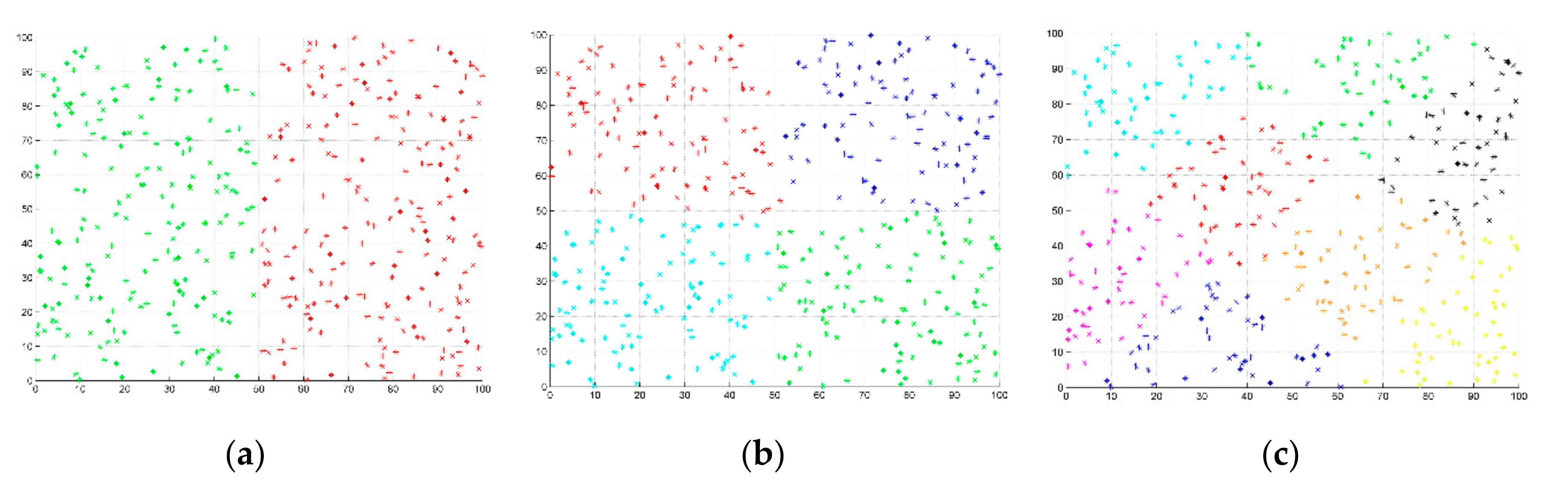
- We present a centralized area partition algorithm based on the importance level, which can reduce conflict during patrolling. We divide the important targets with different importance levels into different partitions and assign USVs to work only in one of the partitions.
- We propose a distributed path planning algorithm for the multi-USV system to plan optimal paths to minimize the total length of the patrolling path in all partitions.
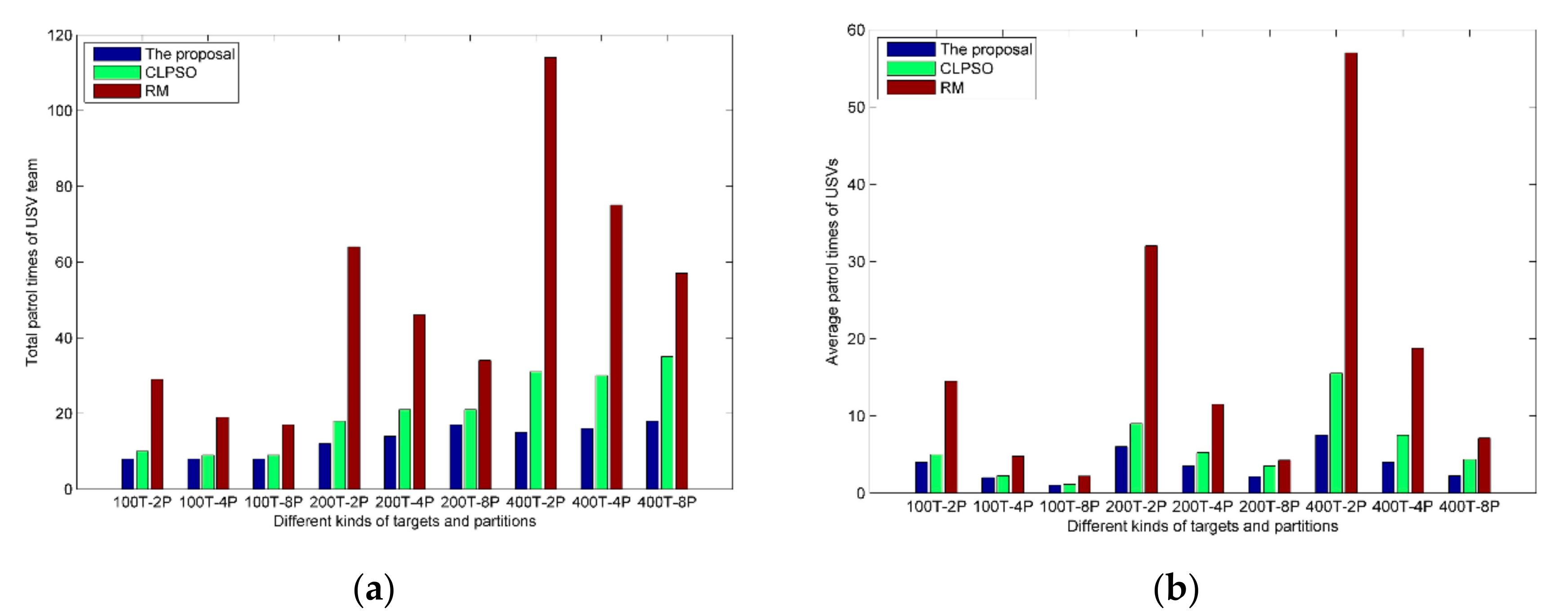
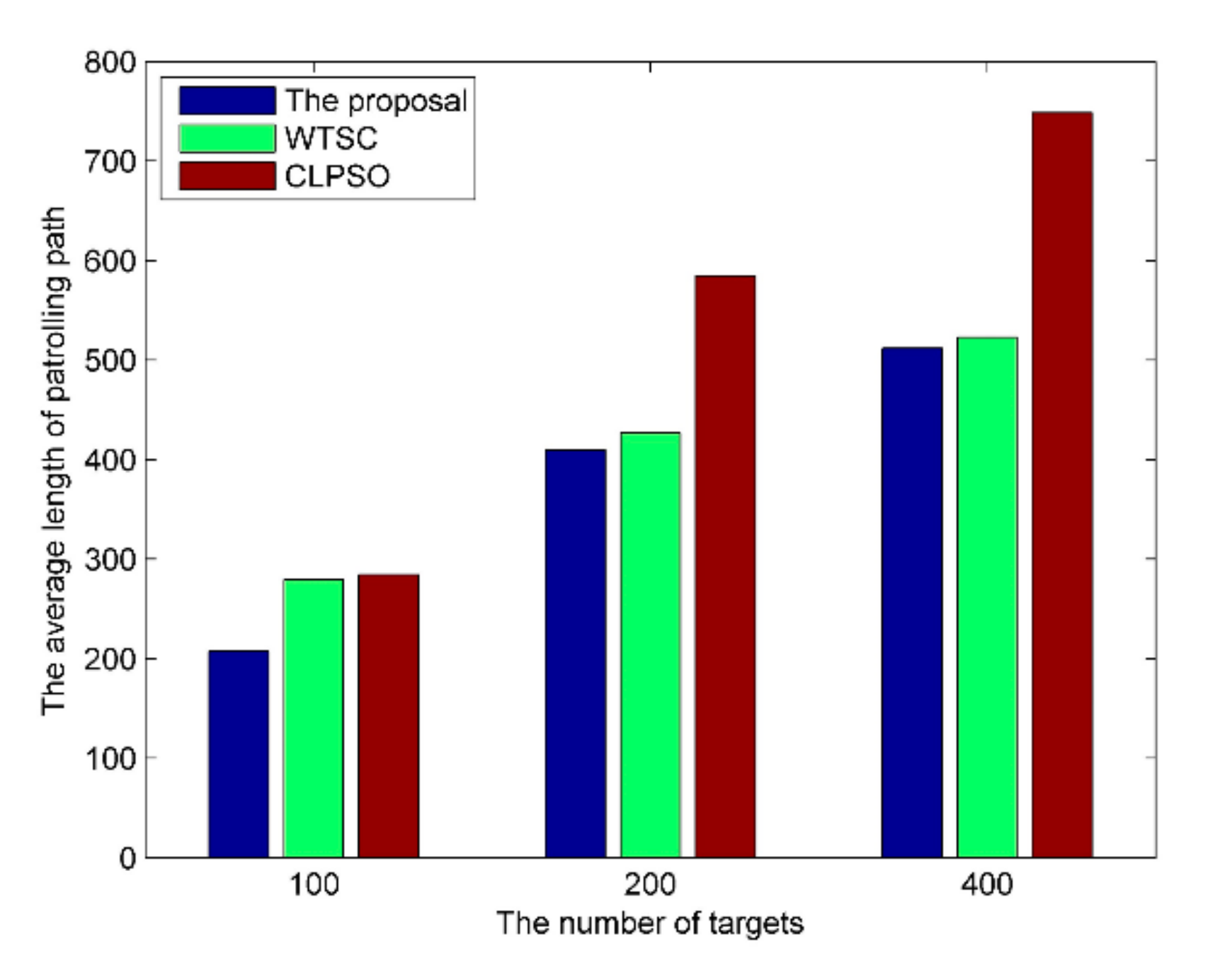
- We evaluate the proposed patrolling scheme with extensive simulations. The simulation results demonstrate the effectiveness of patrolling partition and patrolling path planning.
2. Related Works
3. System Models
3.1. Patrolling Environment Model
3.2. USV Model
3.3. Patrol Task Goal
4. Proposed Scheme
4.1. Problem Formulation
4.2. Partition Algorithm Based on the Importance Level
| Algorithm 1: Partition algorithm based on the importance level |
| Input Targets Input Targets’ importance levels Input Number of partitions Output Partition 1: for iteration = 1 to do 2: Randomly Choose targets as the initial centroids 3: repeat 4: For each target, select the nearest centroid as its partition 5: Reset the centroids to the weighted center of all targets in each partition by (16) 6: until convergence 7: for = 1 to do 8: Calculate the expected task load, by (2) 9: Calculate the difference in task load amongst all USVs, by (3) 10: if then 11: Save partitions and the corresponding cost by (15) in partition buffer 12: end 13: end 14: Pick the partition that has the lowest cost |
4.3. Patrolling Path Planning Algorithm Based on Improved PSO
| Algorithm 2: Patrolling path planning algorithm based on improved PSO |
| Input Partition Output the optimal position and 1:for m = 1 to 2: for i = 1 to do 3: Initialize velocity and position for particle 4: Set 5: end 6: 7: for iteration = 1 to do 8: for i = 1 to do 9: Update the velocity for particle by (22)-(23) 10: = 0 11: 12: while () 13: Generate the next target of target by (24)-(27) 14: 15: end 16: Calculate the fitness of particle 17: 18: 19: end 20: end 21:end |
5. Experiment and Evaluation
5.1. Experimental Setup
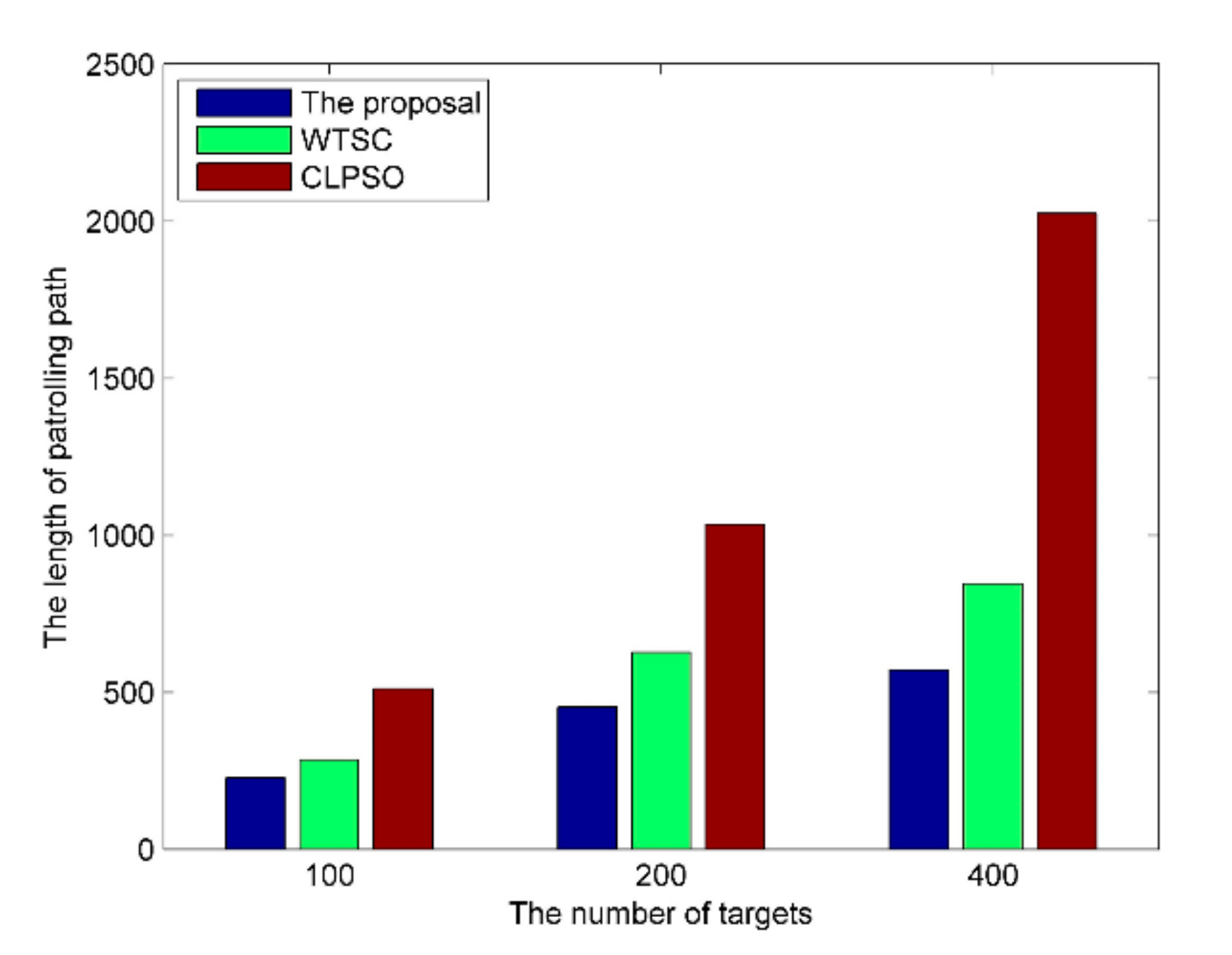
- WTSC: In this method, the patrolling path is generated by a centralized planning algorithm, that is, the WTSC proposed in [25].
- CLPSO: In this method, the patrolling path is generated based on the velocity and position update of CLPSO proposed in [26].
- The random method (RM): In this method, USV randomly selects an available target to visit.
5.2. Results Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Portugal, D.; Pippin, C.; Rocha, R.P.; Christensen, H. Finding optimal routes for multi-robot patrolling in generic graphs. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 July 2014; IEEE: New York, NY, USA, 2014; pp. 363–369. [Google Scholar]
- Hwang, K.S.; Lin, J.L.; Huang, H.L. Cooperative patrol planning of multi-robot systems by a competitive auction system. In Proceedings of the 2009 ICCAS-SICE, Fukuoka City, Japan, 18–21 August 2009; IEEE: New York, NY, USA, 2009; pp. 4359–4363. [Google Scholar]
- Poulet, C.; Corruble, V.; Seghrouchni, A.E.F. Working as a team: Using social criteria in the timed patrolling problem. In Proceedings of the 2012 IEEE 24th International Conference on Tools with Artificial Intelligence, Athens, Greece, 7–9 November 2012; IEEE: New York, NY, USA, 2012; Volume 1, pp. 933–938. [Google Scholar]
- Othmani-Guibourg, M.; El Fallah-Seghrouchni, A.; Farges, J.L.; Potop-Butucaru, M. Multi-agent patrolling in dynamic environments. In Proceedings of the 2017 IEEE International Conference on Agents (ICA), Beijing, China, 6–9 July 2017; IEEE: New York, NY, USA, 2017; pp. 72–77. [Google Scholar]
- Yan, C.; Zhang, T. Multi-robot patrol: A distributed algorithm based on expected idleness. Int. J. Adv. Robot. Syst. 2016, 13, 1729881416663666. [Google Scholar] [CrossRef]
- Portugal, D.; Rocha, R.P. On the performance and scalability of multi-robot patrolling algorithms. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; IEEE: New York, NY, USA, 2011; pp. 50–55. [Google Scholar]
- Sea, V.; Sugiyama, A.; Sugawara, T. Frequency-Based Multi-agent Patrolling Model and Its Area Partitioning Solution Method for Balanced Workload. In International Conference on the Integration of Constraint Programming, Artificial Intelligence, and Operations Research; Springer: Cham, Switzeland, 2018; pp. 530–545. [Google Scholar]
- Lauri, F.; Koukam, A. A two-step evolutionary and ACO approach for solving the multi-agent patrolling problem. In Proceedings of the 2008 IEEE Congress on Evolutionary Computation (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–6 June 2008; pp. 861–868. [Google Scholar]
- Karypis, G.; Kumar, V. A fast and high quality multilevel scheme for partition irregular graphs. SIAM J. Sci. Comput. 1998, 20, 359–392. [Google Scholar] [CrossRef]
- Chen, X. Police patrol optimization with security level functions. IEEE Trans. Syst. Man Cybern. Syst. 2013, 43, 1042–1051. [Google Scholar] [CrossRef]
- Fitzpatrick, B.G.; Holmbeck-Cannell, K.; Laffin, M.; Wang, Y. Optimal perimeter patrol via max-plus probability. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 5248–5253. [Google Scholar]
- Farinelli, A.; Iocchi, L.; Nardi, D. Distributed on-line dynamic task assignment for multi-robot patrolling. Auton. Robots 2017, 41, 1321–1345. [Google Scholar] [CrossRef]
- Sugiyama, A.; Sea, V.; Sugawara, T. Emergence of divisional cooperation with negotiation and re-learning and evaluation of flexibility in continuous cooperative patrol problem. Knowl. Inf. Syst. 2019, 60, 1587–1609. [Google Scholar] [CrossRef]
- Wiandt, B.; Simon, V.; Kőkuti, A. Self-organized graph partitioning approach for multi-agent patrolling in generic graphs. In Proceedings of the IEEE EUROCON 2017–17th International Conference on Smart Technologies, Ohrid, Macedonia, 6–8 July 2017; pp. 605–610. [Google Scholar]
- Sea, V.; Sugawara, T. Area partitioning method with learning of dirty areas and obstacles in environments for cooperative sweeping robots. In Proceedings of the 2015 IIAI 4th International Congress on Advanced Applied Informatics, Okayama, Japan, 12–16 July 2015; pp. 523–529. [Google Scholar]
- Sea, V.; Kato, C.; Sugawara, T. Coordinated area partitioning method by autonomous agents for continuous cooperative tasks. J. Inf. Proc. 2017, 25, 75–87. [Google Scholar] [CrossRef]
- Sugiyama, A.; Sea, V.; Sugawara, T. Effective task allocation by enhancing divisional cooperation in multi-agent continuous patrolling tasks. In Proceedings of the 2016 IEEE 28th international conference on tools with artificial intelligence (ICTAI), San Jose, CA, USA, 6–8 November 2016; pp. 33–40. [Google Scholar]
- Yasuyuki, S.; Hirofumi, O.; Tadashi, M.; Maya, H. Cooperative capture by multi-agent using reinforcement learning application for security patrol systems. In Proceedings of the 2015 10th Asian Control Conference (ASCC), Kota Kinabalu, Malaysia, 31 May–3 June 2015; pp. 1–6. [Google Scholar]
- Portugal, D.; Rocha, R. Msp algorithm: Multi-robot patrolling based on territory allocation using balanced graph partitioning. In Proceedings of the 2010 ACM Symposium on Applied Computing, Sierre, Switzerland, 22–26 March 2010; pp. 1271–1276. [Google Scholar]
- Qiao, Y.; Yang, J.; Zhang, Q.; Xi, J.; Kong, L. Multi-UAV Cooperative Patrol Task Planning Novel Method Based on Improved PFIH Algorithm. IEEE Access 2019, 7, 167621–167628. [Google Scholar] [CrossRef]
- Huang, L.; Zhou, M.C.; Hao, K.; Hou, E. A survey of multi-robot regular and adversarial patrolling. IEEE/CAA J. Autom. Sin. 2019, 6, 894–903. [Google Scholar] [CrossRef]
- Alam, T.; Rahman, M.M.; Bobadilla, L.; Rapp, B. Multi-vehicle patrolling with limited visibility and communication constraints. In Proceedings of the MILCOM 2017–2017 IEEE Military Communications Conference (MILCOM), Baltimore, MD, USA, 23–25 October 2017; pp. 465–470. [Google Scholar]
- Chen, X. Fast patrol route planning in dynamic environments. IEEE Trans. Syst. Man Cybern. Part A: Syst. Humans 2012, 42, 894–904. [Google Scholar] [CrossRef]
- Chen, S.; Wu, F.; Shen, L.; Chen, J.; Ramchurn, S.D. Decentralized patrolling under constraints in dynamic environments. IEEE Trans. Cybern. 2015, 46, 3364–3376. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Xiong, Y.; She, J.; Wu, M. A path planning method for sweep coverage with multiple UAVs. IEEE Int. Things J. 2020, 7, 8967–8978. [Google Scholar] [CrossRef]
- Liang, J.J.; Qin, A.K.; Suganthan, P.N.; Baskar, S. Comprehensive learning particle swarm optimizer for global optimization of multimodal functions. IEEE Trans. Evol. Comput. 2006, 10, 281–295. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| The given area for patrolling | |
| The set of USVs | |
| The number of USVs | |
| The set of targets in the given area | |
| The number of targets | |
| The coordinate of the mother ship | |
| The coordinate of the -th target | |
| The importance level of -th target | |
| The total number of visits in the -th partition | |
| The highest level of importance of targets | |
| The straight sailing distance from to | |
| The maximum range of the n-th USV un | |
| The augmented partition of the -th partition | |
| The expected task load of the -th partition | |
| The difference in task load amongst all USVs | |
| The path of the -th patrol in the -th partition | |
| The total patrolling path of USV in partition | |
| A binary coefficient | |
| The objective function |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, J.; Zhou, R.; Luo, J.; Peng, Y.; Liu, Y.; Xie, S.; Pu, H. Hybrid Partition-Based Patrolling Scheme for Maritime Area Patrol with Multiple Cooperative Unmanned Surface Vehicles. J. Mar. Sci. Eng. 2020, 8, 936. https://doi.org/10.3390/jmse8110936
Xie J, Zhou R, Luo J, Peng Y, Liu Y, Xie S, Pu H. Hybrid Partition-Based Patrolling Scheme for Maritime Area Patrol with Multiple Cooperative Unmanned Surface Vehicles. Journal of Marine Science and Engineering. 2020; 8(11):936. https://doi.org/10.3390/jmse8110936
Chicago/Turabian StyleXie, Jiajia, Rui Zhou, Jun Luo, Yan Peng, Yuan Liu, Shaorong Xie, and Huayan Pu. 2020. "Hybrid Partition-Based Patrolling Scheme for Maritime Area Patrol with Multiple Cooperative Unmanned Surface Vehicles" Journal of Marine Science and Engineering 8, no. 11: 936. https://doi.org/10.3390/jmse8110936
APA StyleXie, J., Zhou, R., Luo, J., Peng, Y., Liu, Y., Xie, S., & Pu, H. (2020). Hybrid Partition-Based Patrolling Scheme for Maritime Area Patrol with Multiple Cooperative Unmanned Surface Vehicles. Journal of Marine Science and Engineering, 8(11), 936. https://doi.org/10.3390/jmse8110936