A Study on the Minimization of Mooring Load in Fish-Cage Mooring Systems with a Damping Buoy


Abstract
1. Introduction
2. Materials and Methods
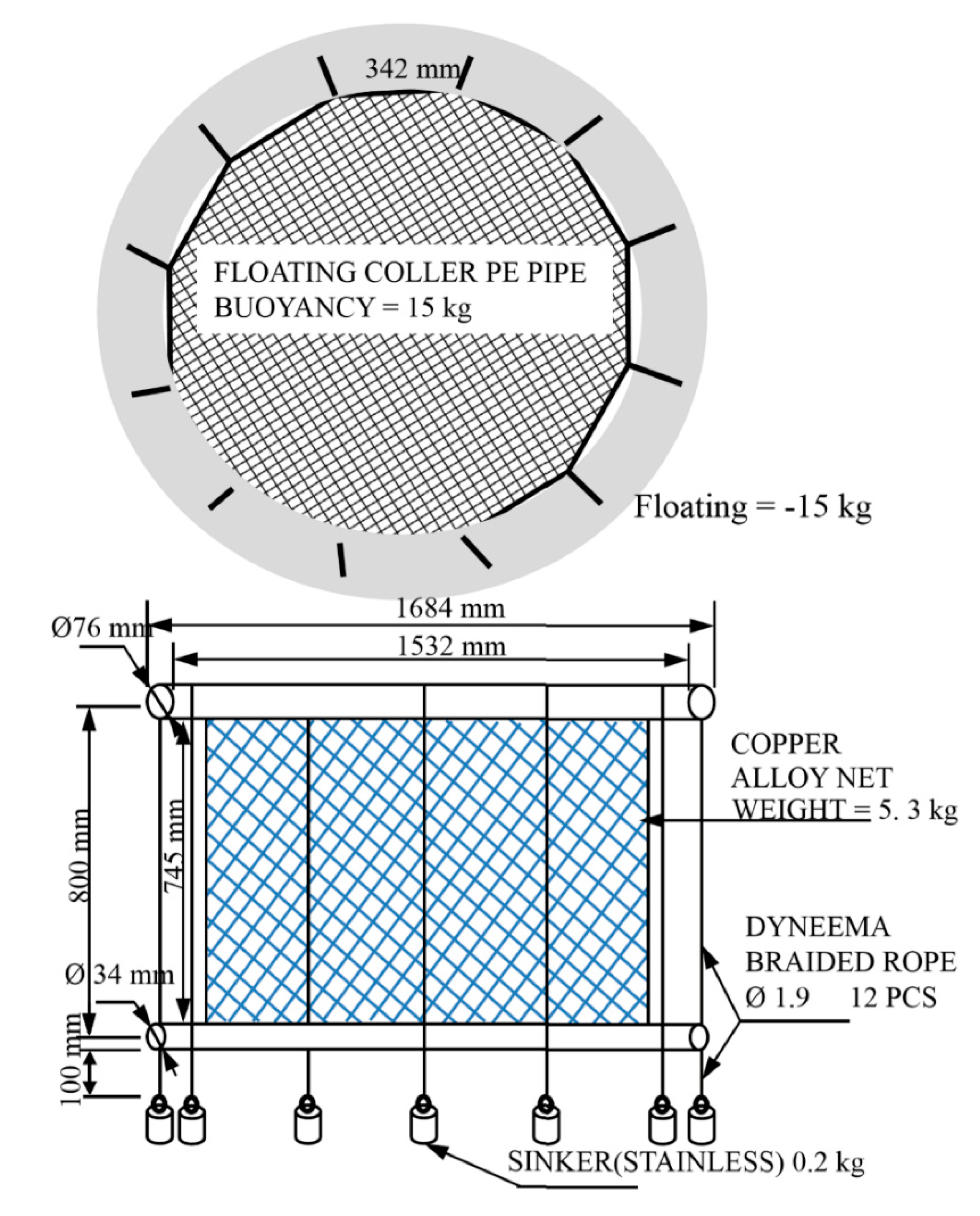
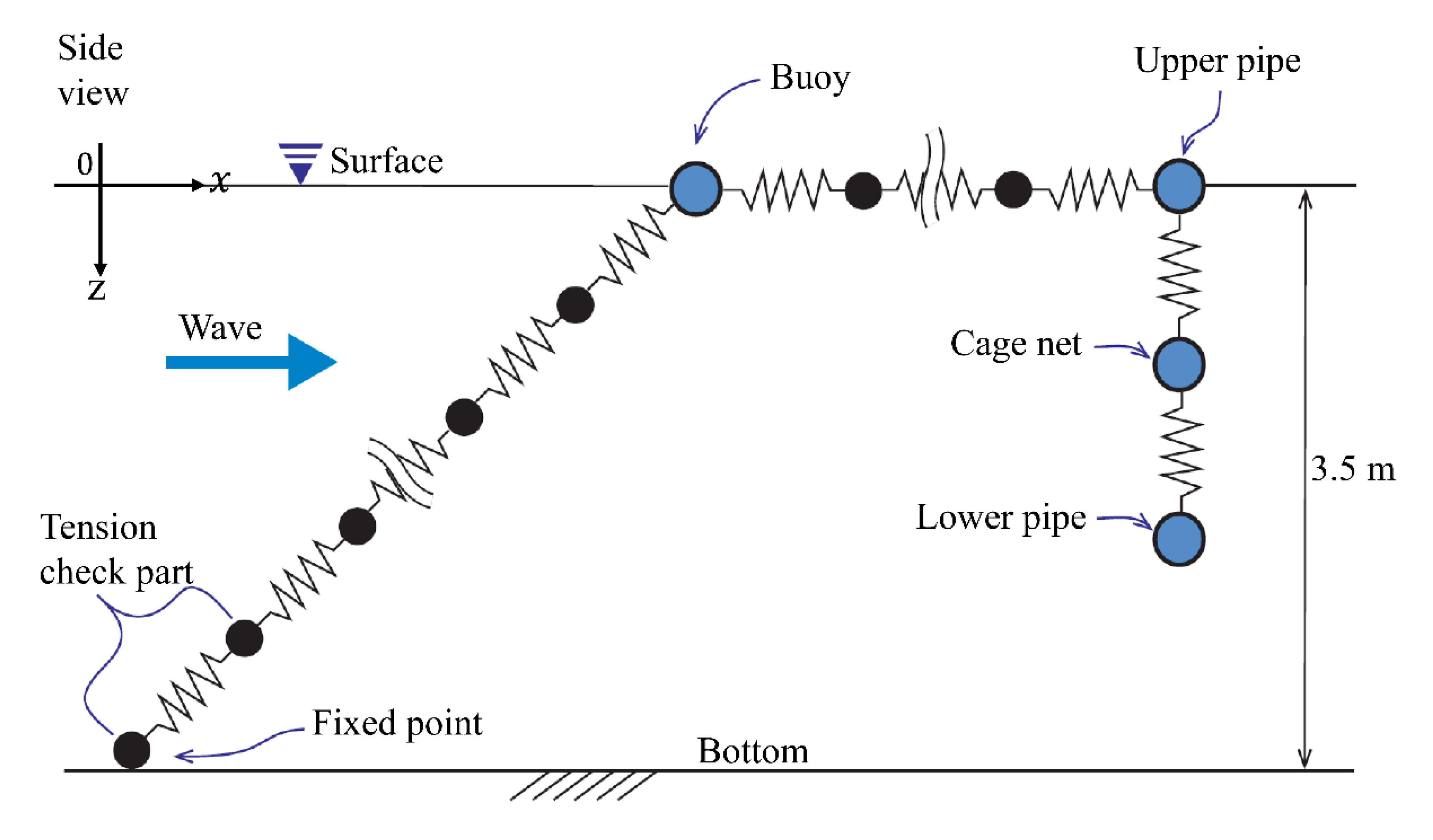
2.1. Fish Cage System Modeling
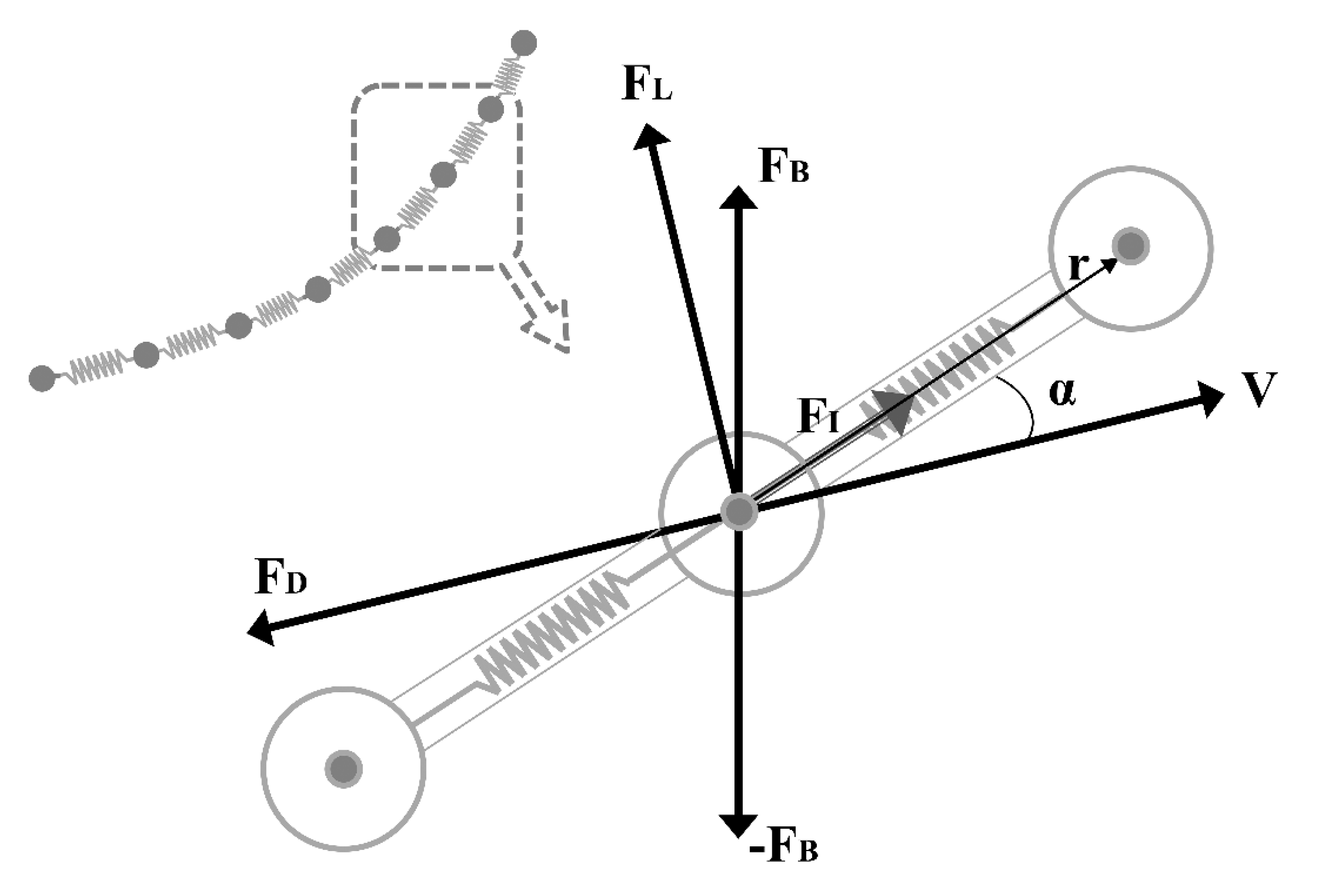
2.2. Wave Theory
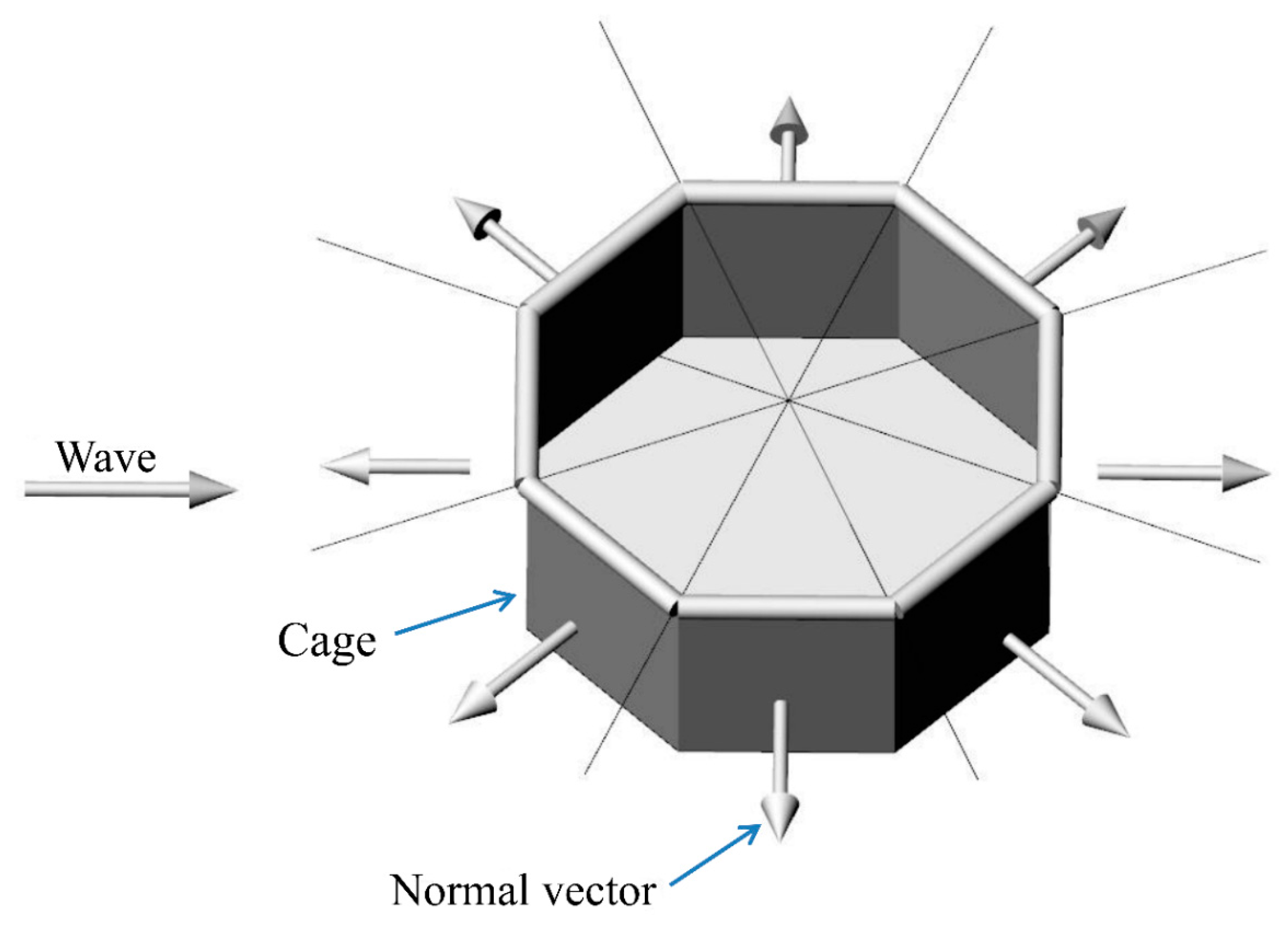
2.3. Simplification of Model for Cage System
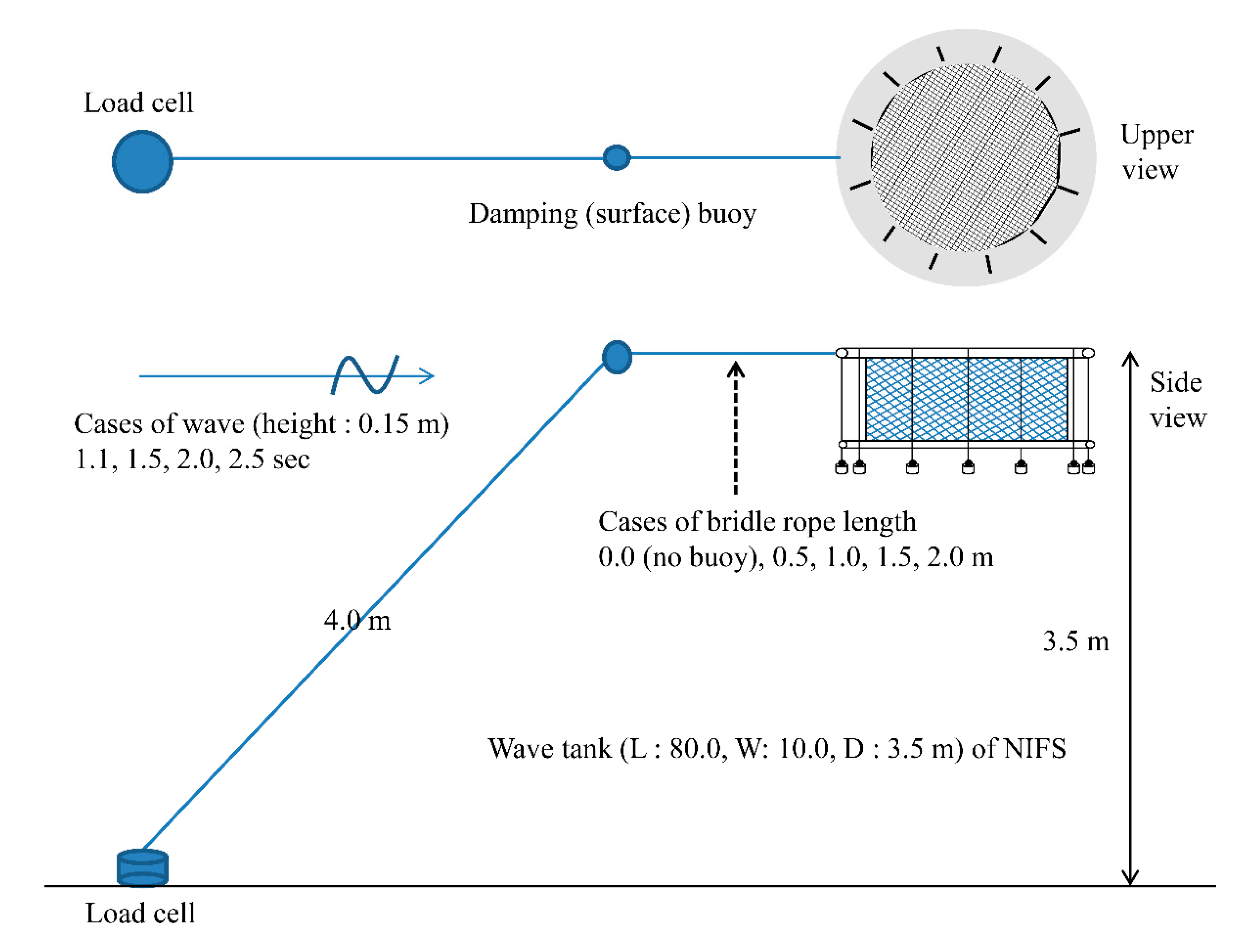
2.4. Simulation for Confirmation of Our Model
2.5. Simulation for Deriving the Minimum Mooring Tension Conditions
3. Results and Discussion
3.1. Verification of the Numerical Model’s Accuracy
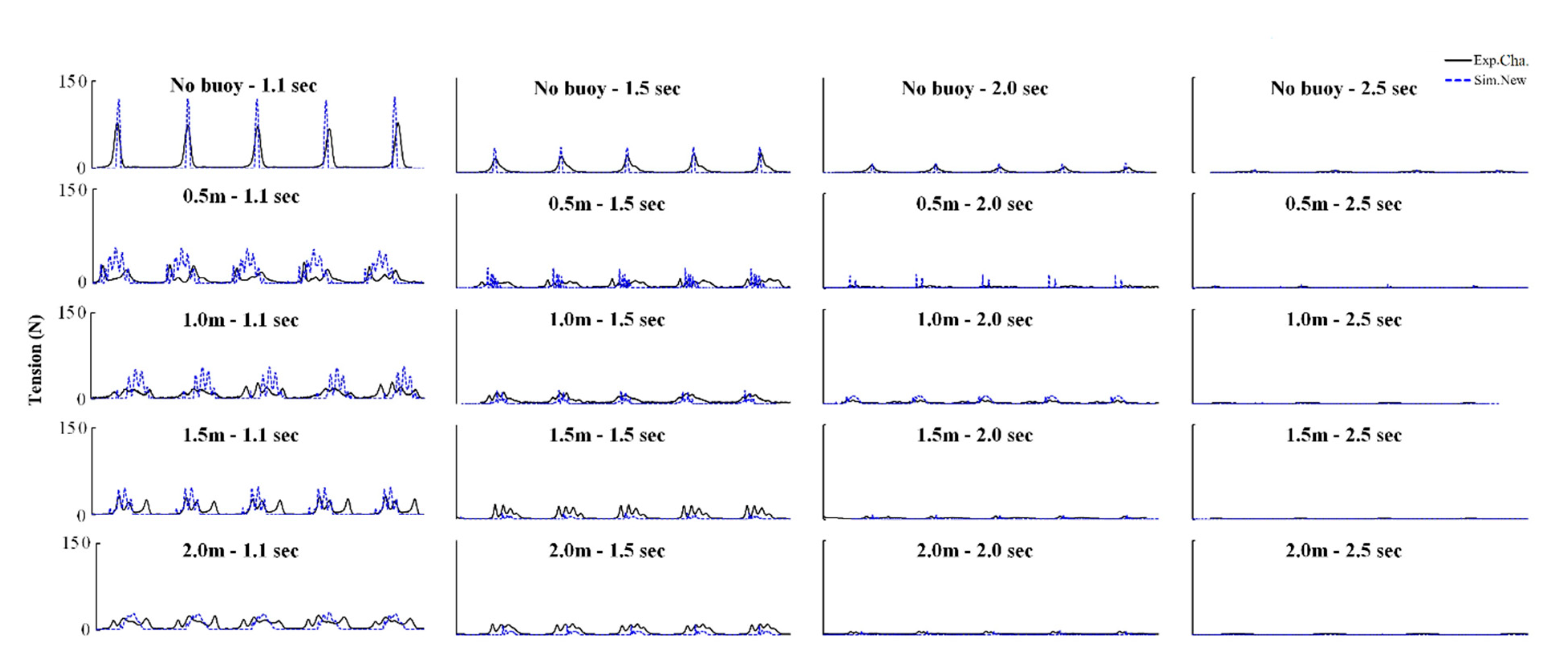
3.1.1. Comparison of Time Series Data of Mooring Tension
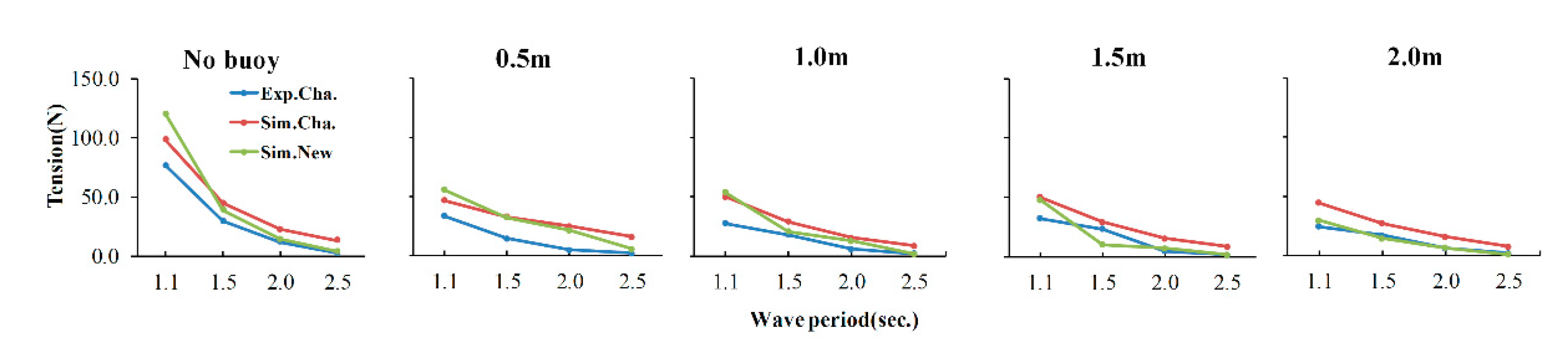
3.1.2. Comparison of Maximum Mooring Tension
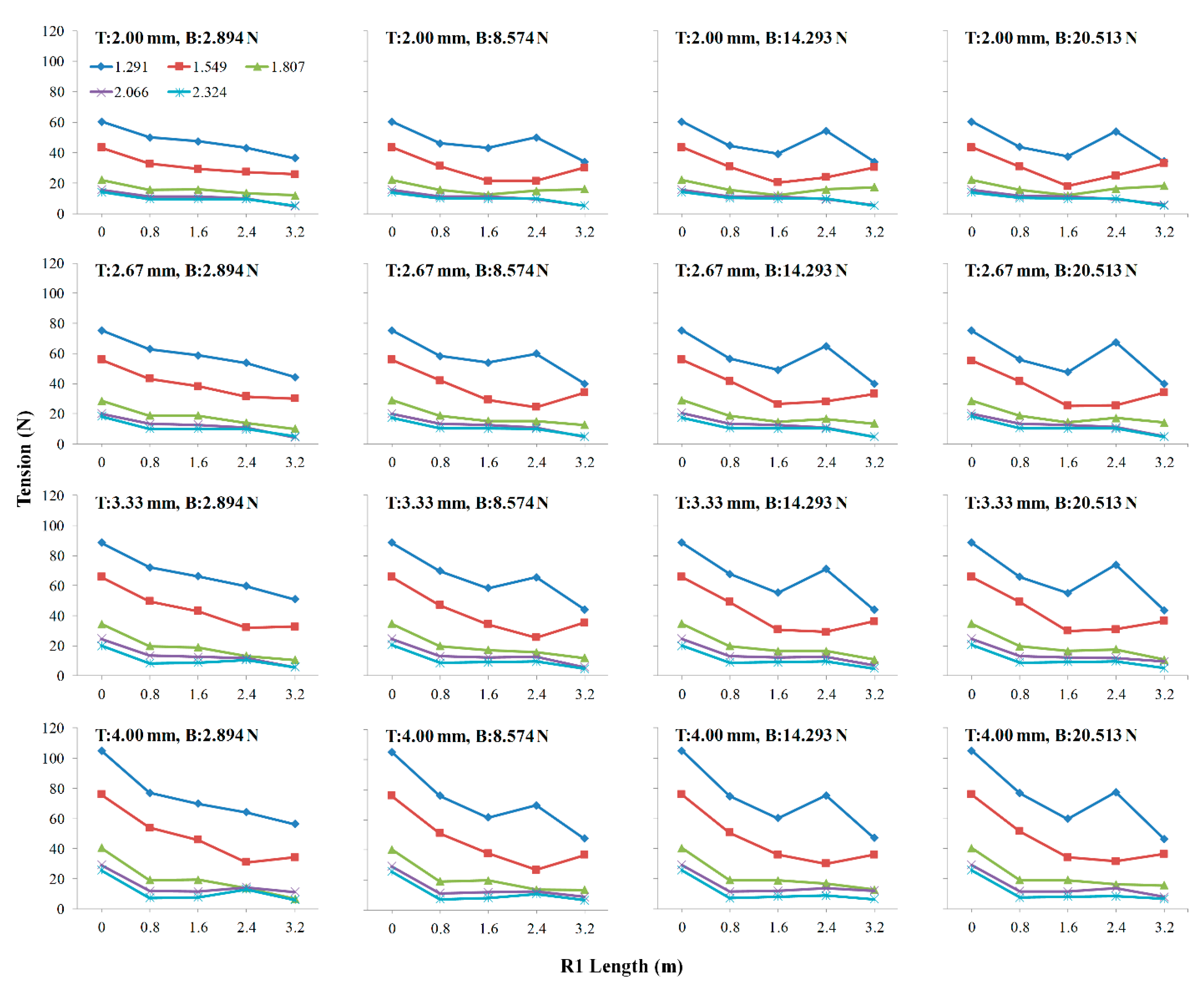
3.2. The Simulation for Deriving Conditions with Minimal Mooring Load
3.2.1. Mooring Tension Based on Mooring-Line Thickness.
3.2.2. Mooring Tension Based on Bridle-Line Length
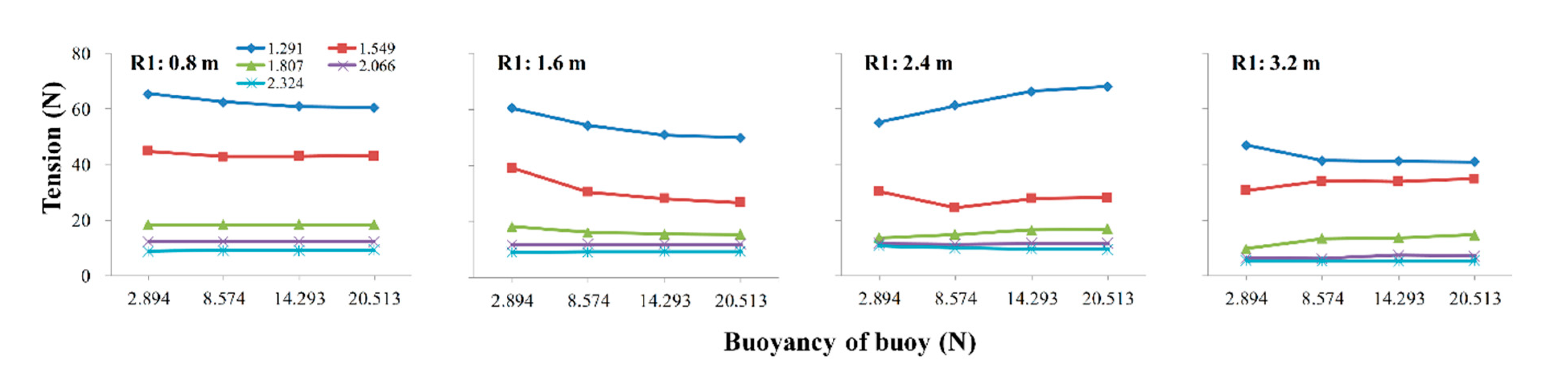
3.2.3. Mooring Tension Based on Buoyancy of Buoy
3.2.4. Mooring Tension Based on Wave Period
3.2.5. Conditions to be the Minimum Mooring Tension
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gunn, D.F.; Rudman, M.; Cohen, R.C.Z. Wave interaction with a tethered buoy: SPH simulation and experimental validation. Ocean Eng. 2018, 156, 306–317. [Google Scholar] [CrossRef]
- Zhao, Y.P.; Bi, C.W.; Chen, C.P.; Li, Y.C.; Dong, G.H. Experimental study on flow velocity and mooring loads for multiple net cages in steady current. Aquacult. Eng. 2015, 67, 24–31. [Google Scholar] [CrossRef]
- Xu, T.J.; Zhao, Y.P.; Dong, G.H.; Bi, C.W. Fatigue analysis of mooring system for net cage under random loads. Aquacult. Eng. 2014, 58, 59–68. [Google Scholar] [CrossRef]
- Shainee, M.; Leira, B.J.; Ellingsen, H.; Fredheim, A. Investigation of a self-submersible SPM cage system in random waves. Aquacult. Eng. 2014, 58, 35–44. [Google Scholar] [CrossRef]
- Hou, H.M.; Dong, G.H.; Xu, T.J.; Zhao, Y.P. System reliability evaluation of mooring system for fish cage under ultimate limit state. Ocean Eng. 2019, 172, 422–433. [Google Scholar] [CrossRef]
- Hou, H.M.; Dong, G.H.; Xu, T.J. An improved lumping block equivalent method for predicting fatigue damage of mooring system for fish cage. Ocean Eng. 2019, 193, 106567. [Google Scholar] [CrossRef]
- Cifuentes, C.; Kim, M.H. Hydrodynamic response of a cage system under waves and currents using a Morison-force model. Ocean Eng. 2017, 141, 283–294. [Google Scholar] [CrossRef]
- Lee, C.W.; Kim, Y.B.; Lee, G.H.; Choe, M.Y.; Lee, M.W.; Koo, K.Y. Dynamic simulation of a fish cage system subjected to currents and waves. Ocean Eng. 2008, 35, 1521–1532. [Google Scholar] [CrossRef]
- Zhao, Y.P.; Guan, C.T.; Bi, C.W.; Liu, H.F.; Cui, Y. Experimental Investigations on Hydrodynamic responses of a Semi-Submersible Offshore Fish Farm in Waves. J. Mar. Sci. Eng. 2019, 7, 238. [Google Scholar] [CrossRef]
- Lekang, O.-I. Aquaculture Engineering; Blackwell Publishing: Oxford, UK, 2007. [Google Scholar] [CrossRef]
- Huang, X.H.; Liu, H.Y.; Hu, Y.; Yuan, T.P.; Tao, Q.Y.; Wang, S.M.; Liu, Z.X. Hydrodynamic performance of a semi-submersible offshore fish farm with a single point mooring system in pure waves and current. Aquacult. Eng. 2020, 90. [Google Scholar] [CrossRef]
- Cha, B.J.; Lee, G.H. Performance of a model fish cage with copper-alloy net in a circulating water channel and wave tank. Ocean Eng. 2018, 151, 290–297. [Google Scholar] [CrossRef]
- Hou, H.M.; Xu, T.J.; Dong, G.H.; Zhao, Y.P.; Bi, C.W. Time-dependent reliability analysis of mooring lines for fish cage under corrosion effect. Aquacult. Eng. 2017, 77, 42–52. [Google Scholar] [CrossRef]
- Lee, C.W.; Lee, J.; Kim, D.H.; Park, S.; Kebede, G. Deformation analysis of fish cage rigged with synthetic fiber and copper net using numerical methods. In Proceedings of the 25th International Ocean and Polar Engineering Conference K.O.N.A., Big Island, HI, USA, 21–26 June 2015. [Google Scholar]
- Lee, C.W.; Lee, J.H.; Choe, M.Y.; Lee, G.H. Design and simulation tools for moored underwater flexible structures. Korean J. Fish. Aquat. Sci. 2010, 43, 159–168. [Google Scholar] [CrossRef]
- Skjelbreia, L.; Hendrickson, J.H. Fifth-order gravity wave theory, Int. Conf. Coastal. Eng. In Proceedings of the 7th Conference on Coastal Engineering, Hague, The Netherlands, 29 January 1960; pp. 184–196. [Google Scholar] [CrossRef]
- Karreman, J.; Leggoe, J.; Cheng, L. Co-operative Education for Enterprise Development Home Page. Available online: https://ceed.wa.edu.au/wp-content/uploads/2017/02/Hydrodynamic-Forces-on-Subsea-Pipelines-Karreman.pdf (accessed on 20 May 2020).
- Marshall, A.L. On implementing fifth order gravity wave theory. J. Soc. Underwater Technol. 1987, 13, 2–4. [Google Scholar] [CrossRef]
- Johnson, R.E.; Wu, T.Y. Hydromechanics of low-Reynolds-number flow: Motion of a slender torus. J. Fluid Mech. 1979, 95, 263–277. [Google Scholar] [CrossRef]
- Sheard, G.J.; Hourigan, K.; Thompson, M.C. Computations of the drag coefficients. J. Fluid Mech. 2005, 526, 257–275. [Google Scholar] [CrossRef]
- Lee, C.W.; Lee, J.H.; Cha, B.J.; Kim, H.Y.; Lee, J.H. Physical modeling for underwater flexible systems dynamic simulation. Ocean Eng. 2005, 32, 331–347. [Google Scholar] [CrossRef]
- Huang, X.H.; Guo, G.X.; Tao, Q.Y.; Hu, Y.; Liu, H.; Wang, S.; Hao, S. Numerical simulation of deformations and forces of a floating fish cage collar in waves. Aquacult. Eng. 2016, 74, 111–119. [Google Scholar] [CrossRef]
- Chen, Y.Y.; Yang, B.D.; Chen, Y.T. Applying a 3-D image measurement technique exploring the deformation of net cage under wave–current interaction. Ocean Eng. 2019, 173, 823–834. [Google Scholar] [CrossRef]
- Radhakrishnan, S.; Datla, R.; Hires, R.I. Theoretical and experimental analysis of tethered buoy instability in gravity waves. Ocean Eng. 2007, 34, 261–274. [Google Scholar] [CrossRef]
- Qin, H.; Xu, Z.; Li, P.; Yu, S. A physical model approach to nonlinear vertical accelerations and mooring loads of an offshore aquaculture cage induced by wave-structure interactions. Ocean Eng. 2020, 197. [Google Scholar] [CrossRef]
- Jeon, I.K.; Nam, I.K.; Park, S.C.; Lee, U.L.; Jeong, I.H. Hydrography; Donghwa: Paju-si, Gyeonggi-do, Korea, 2012; pp. 404–405. [Google Scholar]
- Maatoug, M.A.; Ayadi, M. Numerical simulation of the second-order Stokes theory using finite difference method. Alex. Eng. J. 2016, 55, 3009. [Google Scholar] [CrossRef][Green Version]
- FAO. Fishermans Workbook; Fishing News Books: Oxford, UK, 1990. [Google Scholar]
- Gere, J.M.; Goodno, B. Mechanics of Materials, 7th ed.; Cengage Learning: Seoul, Korea, 2011. [Google Scholar]
- Haliday, D.; Resnick, R.; Walker, J. Principles of Physics: Extended, 9th ed.; Bumhan Books: Seoul, Korea, 2011. [Google Scholar]
- Ahmed, M.R.; Faizal, M.; Prasad, K.; Cho, Y.J.; Kim, C.G.; Lee, Y.H. Exploiting the orbital motion of water particles for energy extraction from waves. J. Mech. Sci. Technol. 2010, 24, 943–949. [Google Scholar] [CrossRef]
- Sundaravadivelu, R.; Babu, M.H.; Murugaganesh, R. Experimental investigation on a single point buoy mooring system. Ocean Eng. 1991, 18, 405–417. [Google Scholar] [CrossRef]
- Huang, X.H.; Guo, G.X.; Tao, Q.Y.; Hu, Y.; Liu, H.Y.; Wang, S.M.; Hao, S.H. Dynamic deformation of the floating collar of a net cage under the combined effect of waves and current. Aquacult. Eng. 2018, 83, 47–56. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Size | Material Properties |
|---|---|---|
| (mm or N) | ||
| Floating collar | PE one-layer water | |
| Diameter (outer) | 1684 | pipe |
| Diameter (Inner) | 1535 | |
| Floating force | 152 | |
| Buoy | Injection molding | |
| Diameter | 240 | |
| Mooring line | Dyneema braided rope | |
| Diameter | 1.9 | |
| Length from bottom | 4000 | |
| Gaps between cage and buoy | 0, 500, 1000, | |
| 1500, 2000 | ||
| Net | Copper alloy, Chain linked | |
| Diameter | 0.9 | |
| Mesh size | 16 × 11.5 | |
| Mesh number | 252 × 55 | |
| Net depth | 745 | |
| Total weight | 52 | |
| Under water collar | PE one-layer water pipe | |
| Circumference | 5051 | |
| Tube diameter | 34 | |
| Floating force | 0 | |
| Sinker | SUS 304 | |
| Weight | 1.9 | |
| Number | 12 |
| Wave Height (m) | Wave Period (s) | Bridle-Line Length (m) | Rope Thickness (mm) | Buoy Buoyancy (N) |
|---|---|---|---|---|
| 0.333 | 1.291(2.937) * | 0.8 | 4.00 | 2.894 |
| 1.549(4.007) * | 1.6 | 3.33 | 8.574 | |
| 1.807(5.298) * | 2.4 | 2.67 | 14.293 | |
| 2.066(6.804) * | 3.2 | 2.00 | 20.513 | |
| 2.324(8.471) * |
| Wave Period (sec.) | Rope Thickness (mm) | Buoyancy of Buoy (N) | Bridle-line Length (m) | Rope Tension (N) |
|---|---|---|---|---|
| 1.291 | 2.00 | 14.293 | 3.2 | 34.041 |
| 1.549 | 2.00 | 20.513 | 1.6 | 18.050 |
| 1.807 | 4.00 | 2.894 | 3.2 | 6.769 |
| 2.066 | 2.67 | 2.894 | 3.2 | 4.316 |
| 2.324 | 3.33 | 8.574 | 3.2 | 4.611 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, G.-H.; Cha, B.-J.; Kim, H.-y. A Study on the Minimization of Mooring Load in Fish-Cage Mooring Systems with a Damping Buoy. J. Mar. Sci. Eng. 2020, 8, 814. https://doi.org/10.3390/jmse8100814
Lee G-H, Cha B-J, Kim H-y. A Study on the Minimization of Mooring Load in Fish-Cage Mooring Systems with a Damping Buoy. Journal of Marine Science and Engineering. 2020; 8(10):814. https://doi.org/10.3390/jmse8100814
Chicago/Turabian StyleLee, Gun-Ho, Bong-Jin Cha, and Hyun-young Kim. 2020. "A Study on the Minimization of Mooring Load in Fish-Cage Mooring Systems with a Damping Buoy" Journal of Marine Science and Engineering 8, no. 10: 814. https://doi.org/10.3390/jmse8100814
APA StyleLee, G.-H., Cha, B.-J., & Kim, H.-y. (2020). A Study on the Minimization of Mooring Load in Fish-Cage Mooring Systems with a Damping Buoy. Journal of Marine Science and Engineering, 8(10), 814. https://doi.org/10.3390/jmse8100814