The Flow Noise Calculation for an Axisymmetric Body in a Complex Underwater Environment

Abstract
:1. Introduction
2. Analytical Calculation Method
2.1. Panel Method for Computing the Pressure Distribution
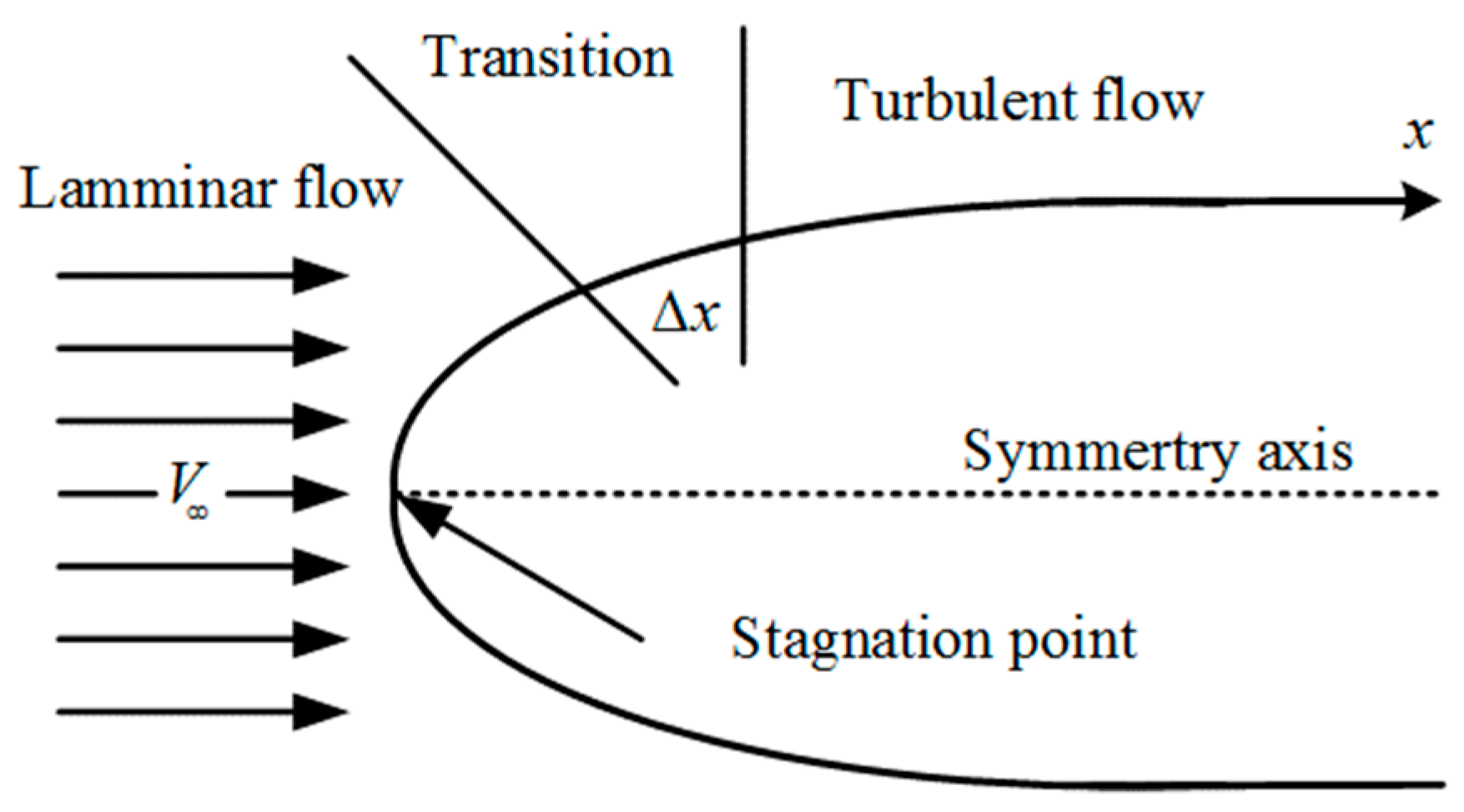
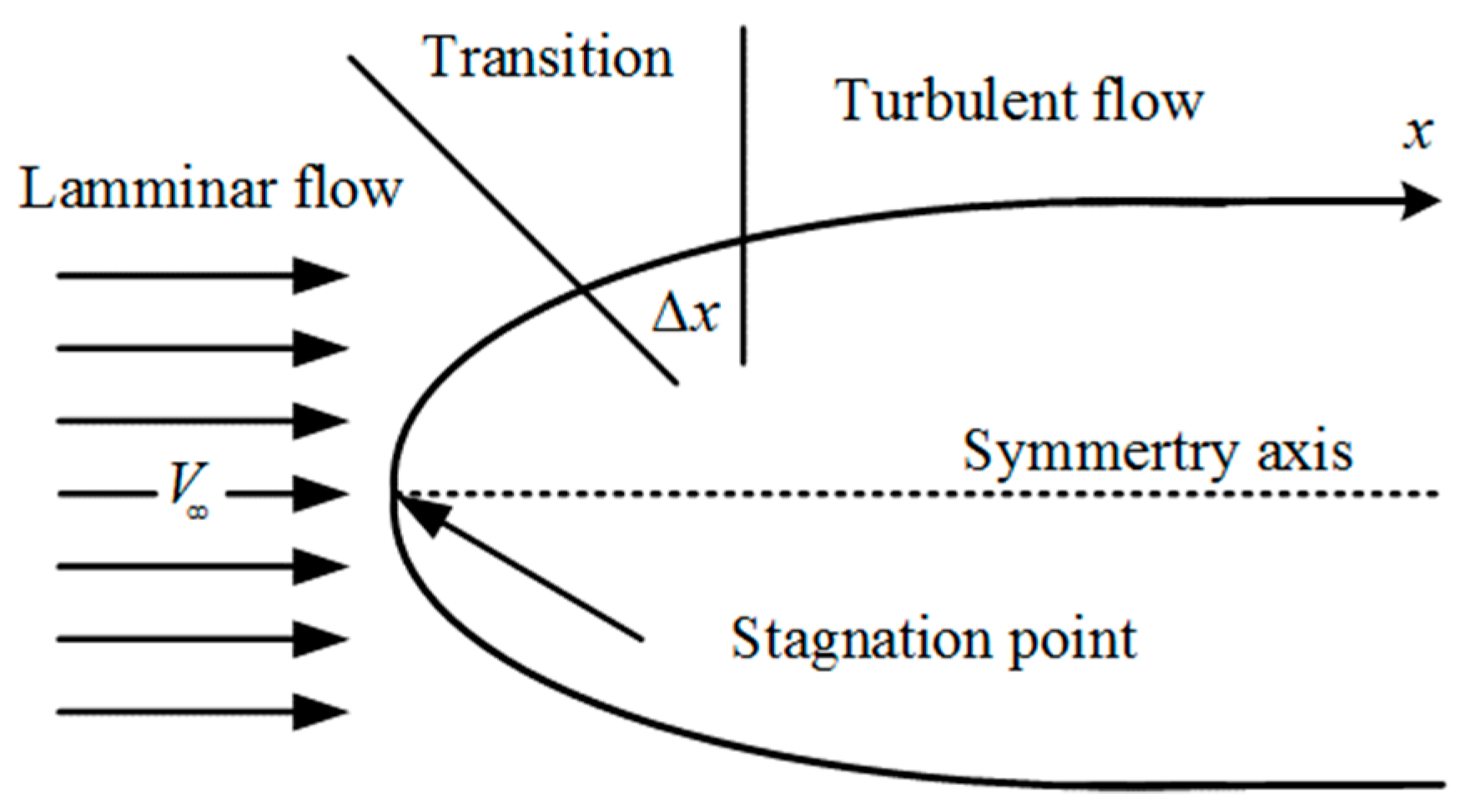
2.2. Calculation of the Transition Region Length
2.3. Calculation of Displacement Thickness Difference
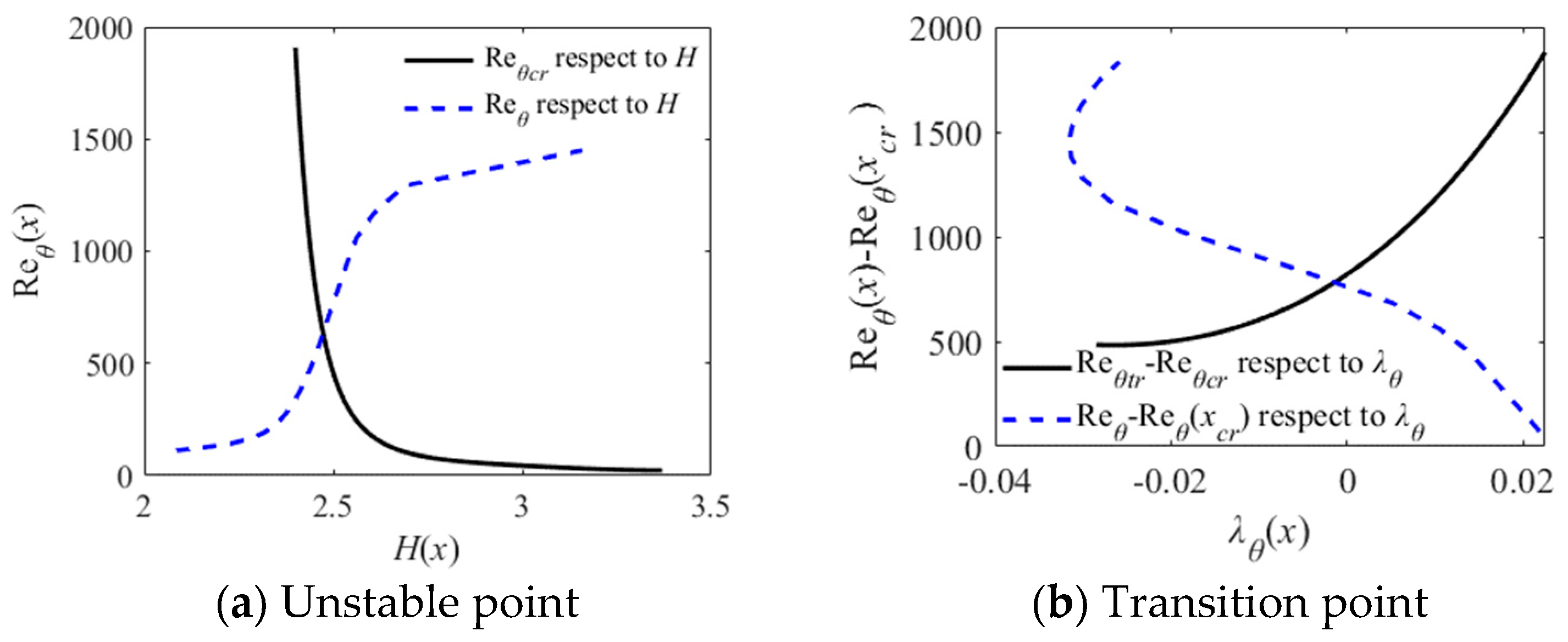
- The results of θ(n) and H(n) computed from the laminar boundary layer are taken as the initial values, where n denotes the unstable point;
- is computed from
- F(n) is computed fromwhere F means the growth rate of the volume flow in the boundary layer along the x direction, which is called the suction coefficient;
- is computed from
- is computed from
- is computed fromwhere Cf is the surface frictional stress coefficient;
- is computed from
- θ(n+1) is computed from
- is computed from
- H(n+1) is computed from
- Then return to step 2, sequentially find all the θ and H in the transition region, and calculate the displacement thickness δ* according to Equation (17).
3. Numerical Calculation Method
3.1. Flow Field Control Equation
3.2. Acoustic Field Control Equations
4. Results and Analysis
4.1. Analytical Calculation Results
- 1.
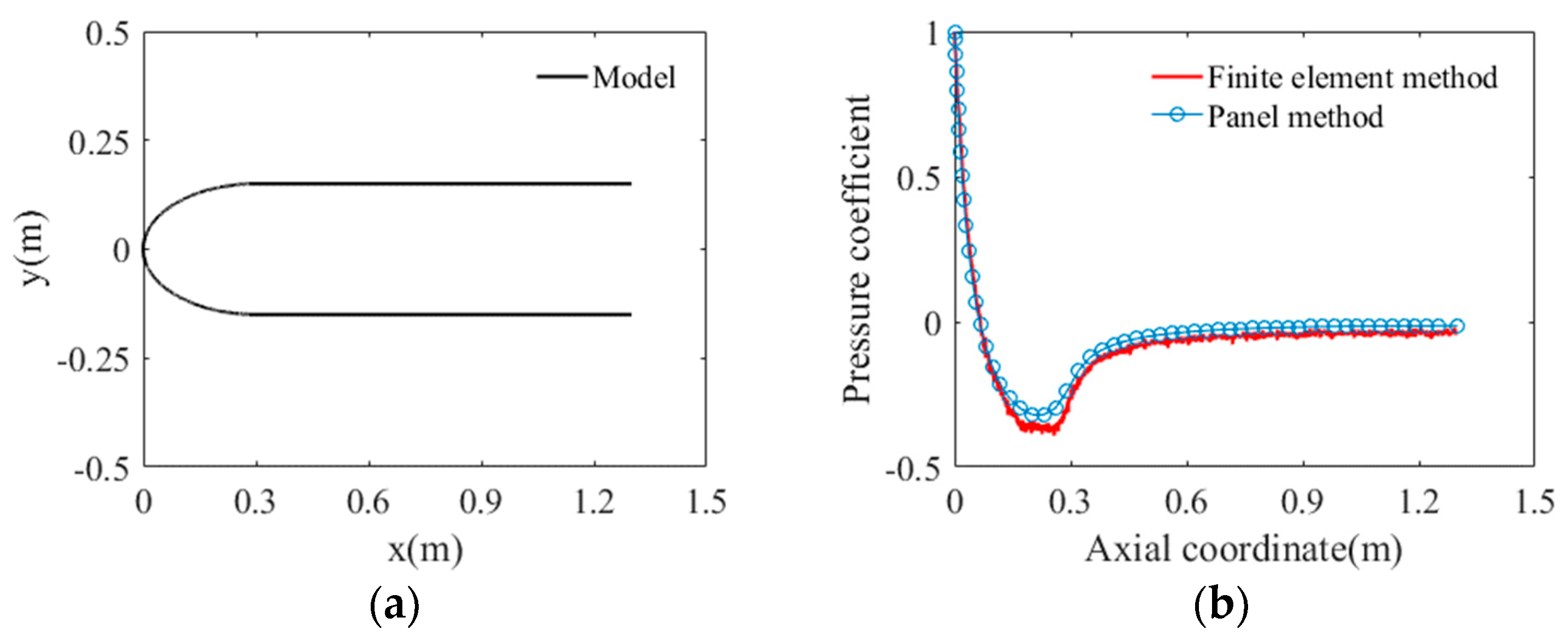
- Calculation of the pressure coefficient
- 2.
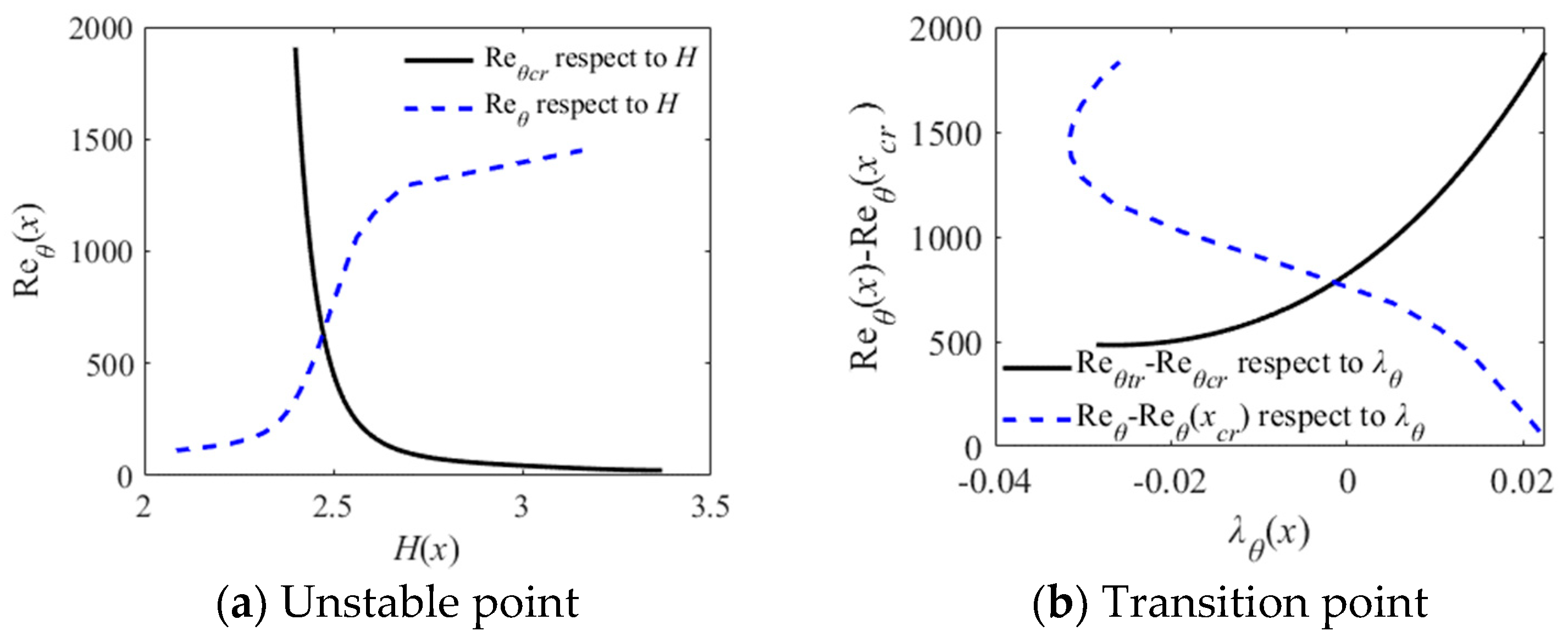
- Calculation of the displacement thickness difference and the transition region length
- 3.
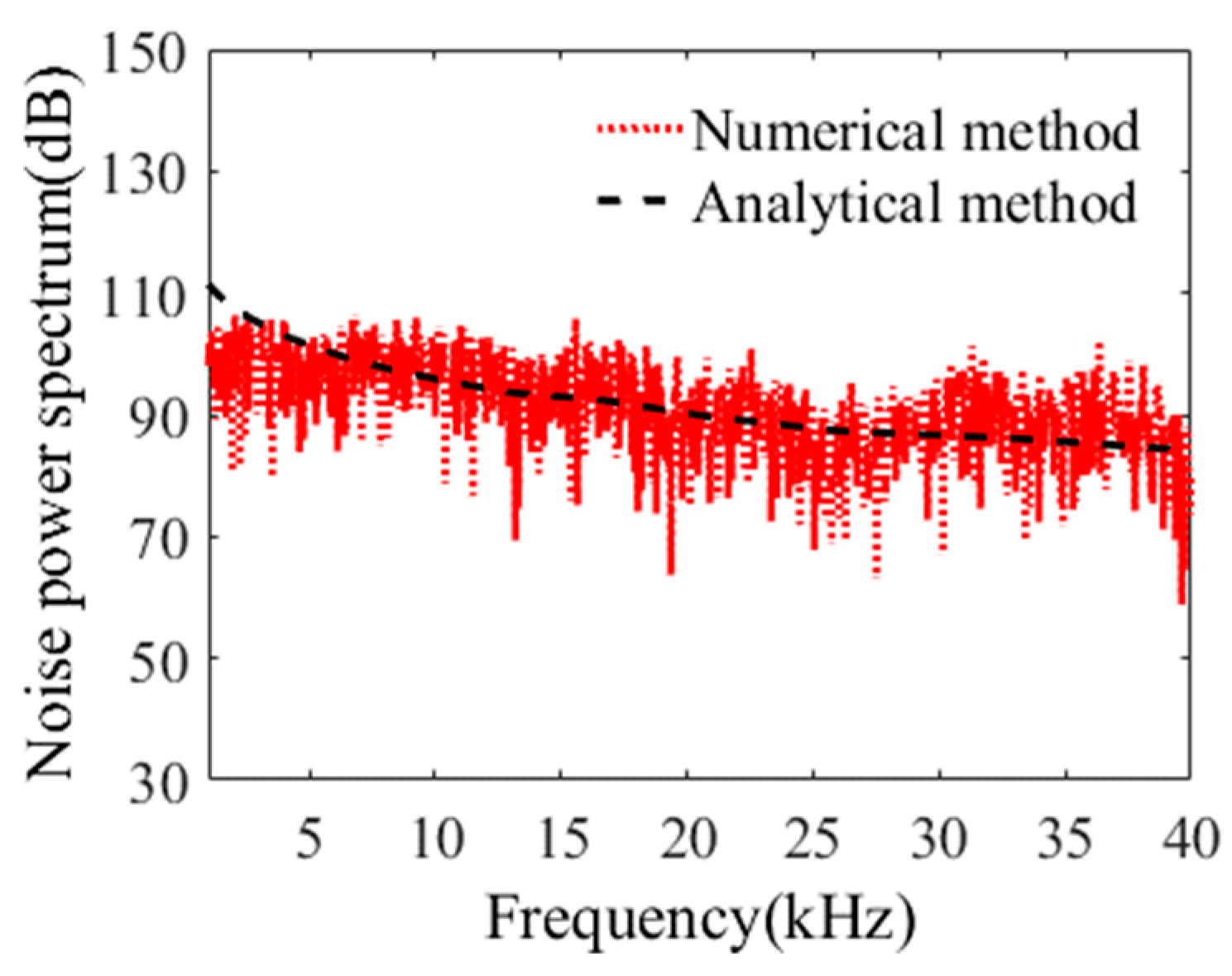
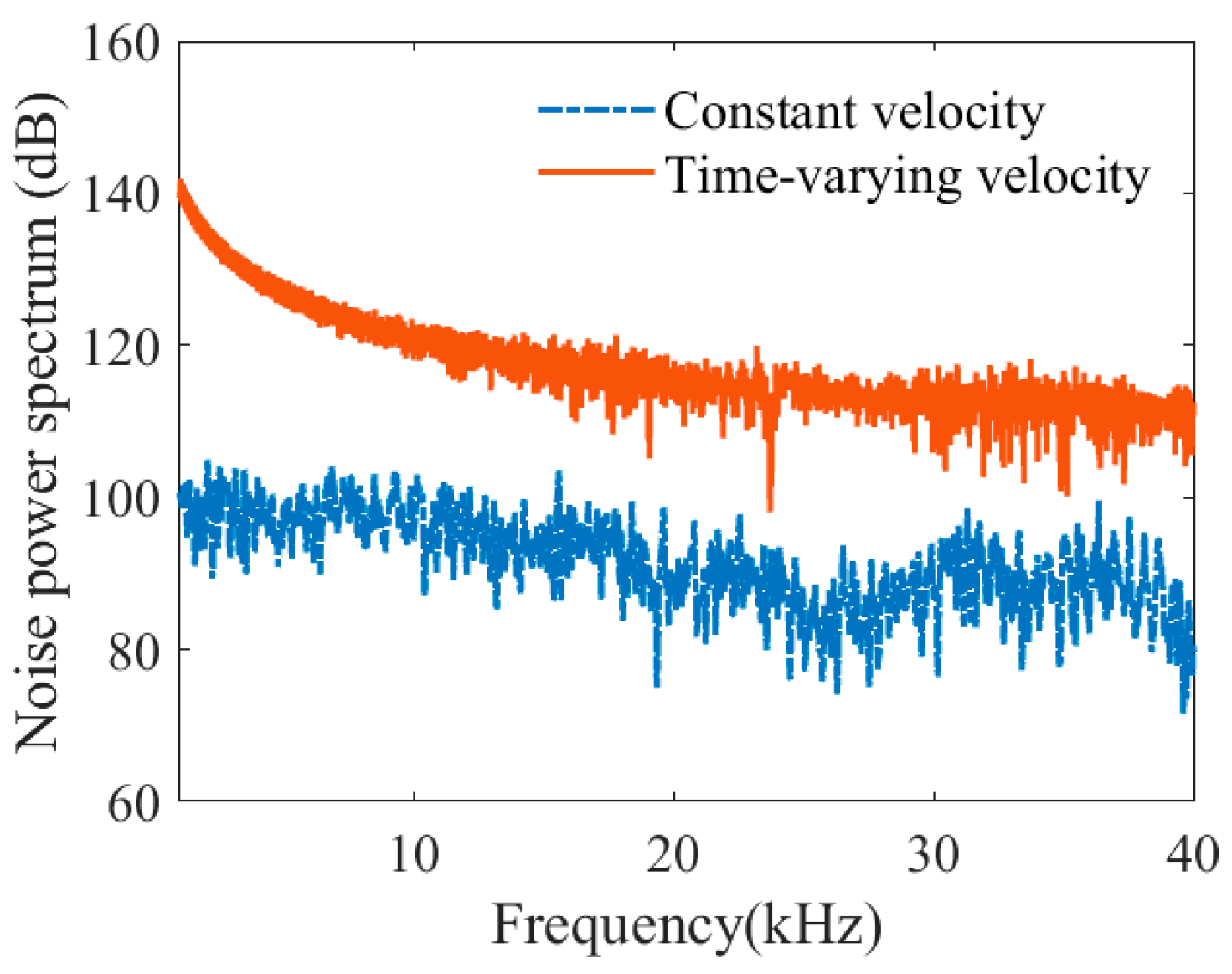
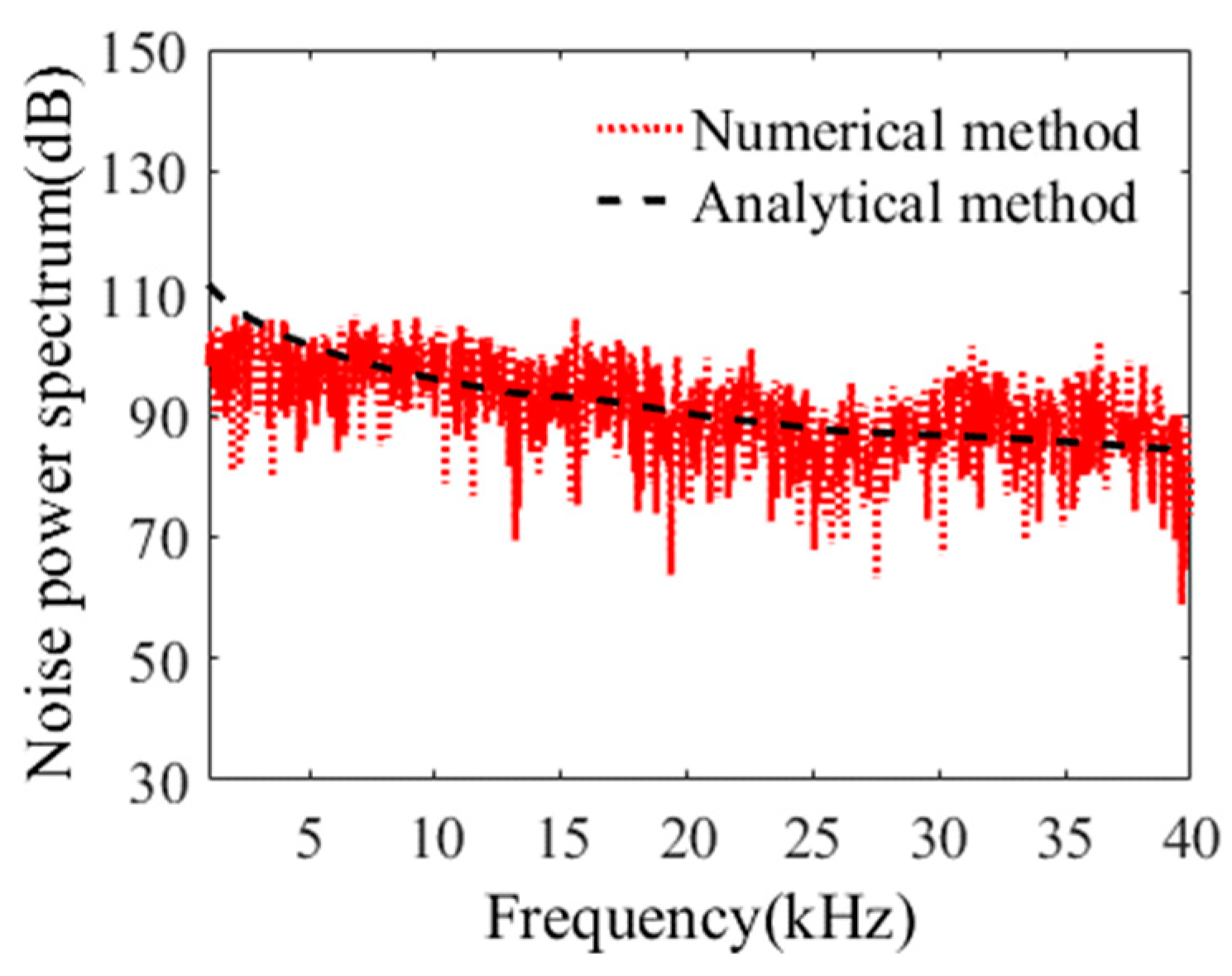
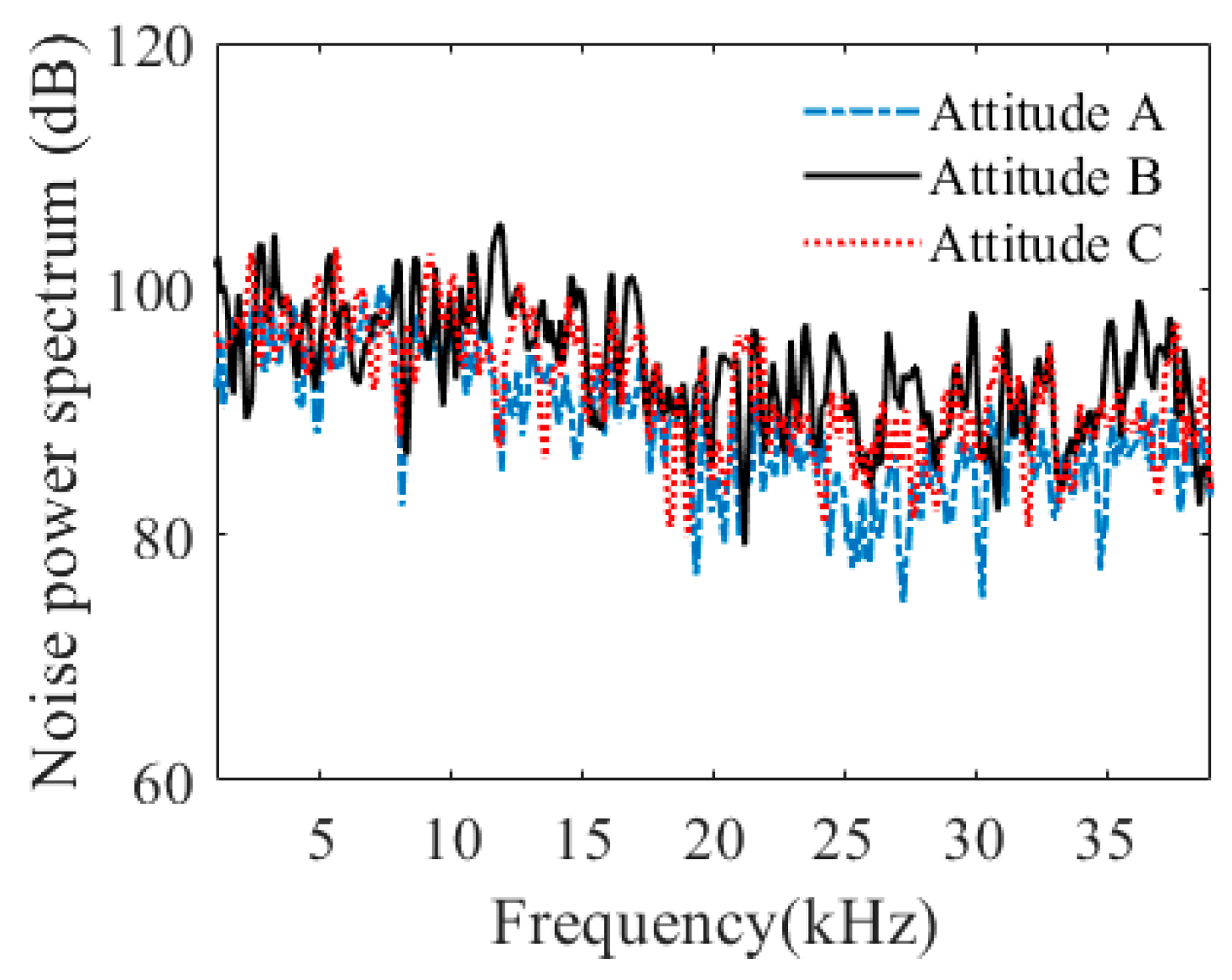
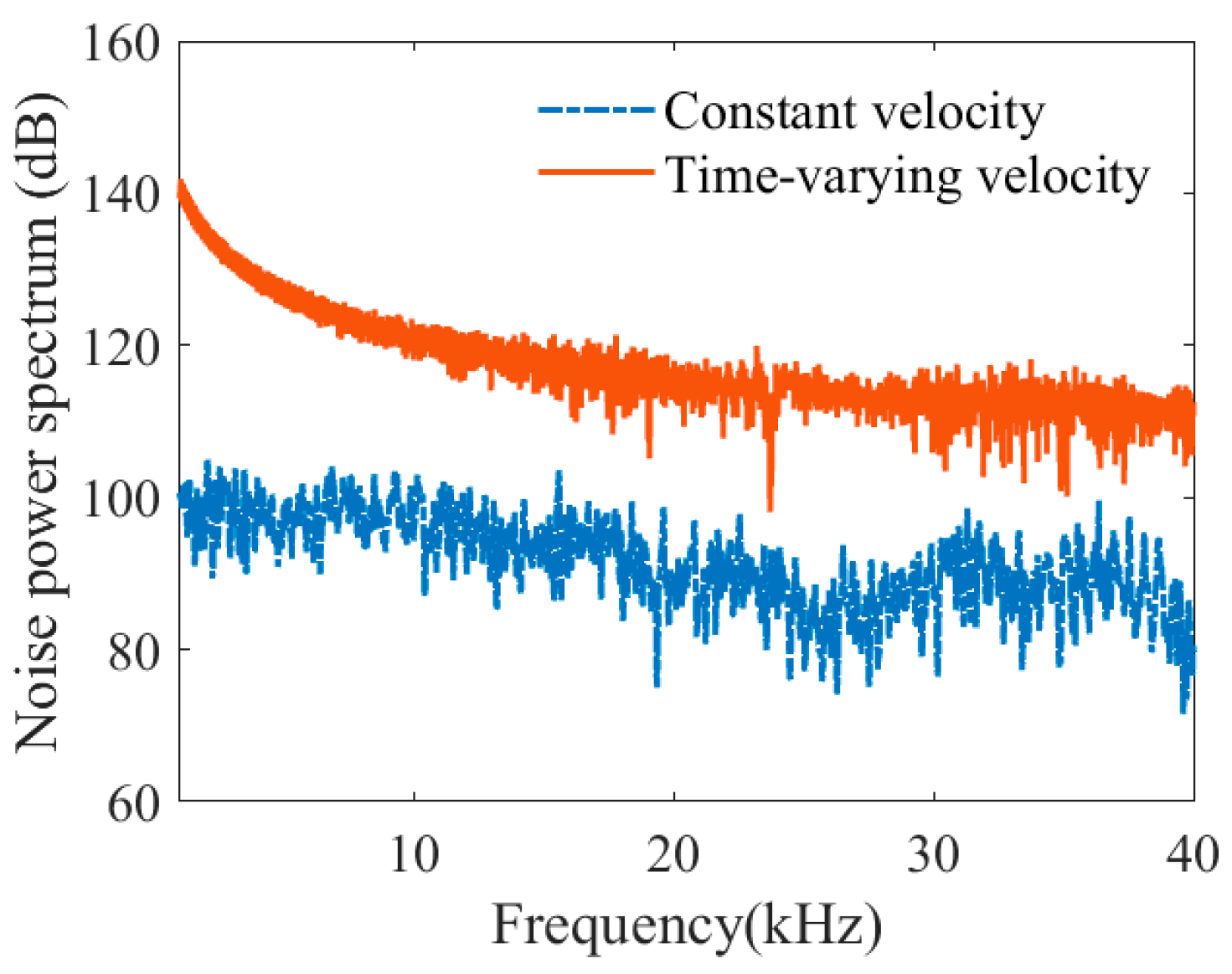
- Calculation of the flow noise power spectrum
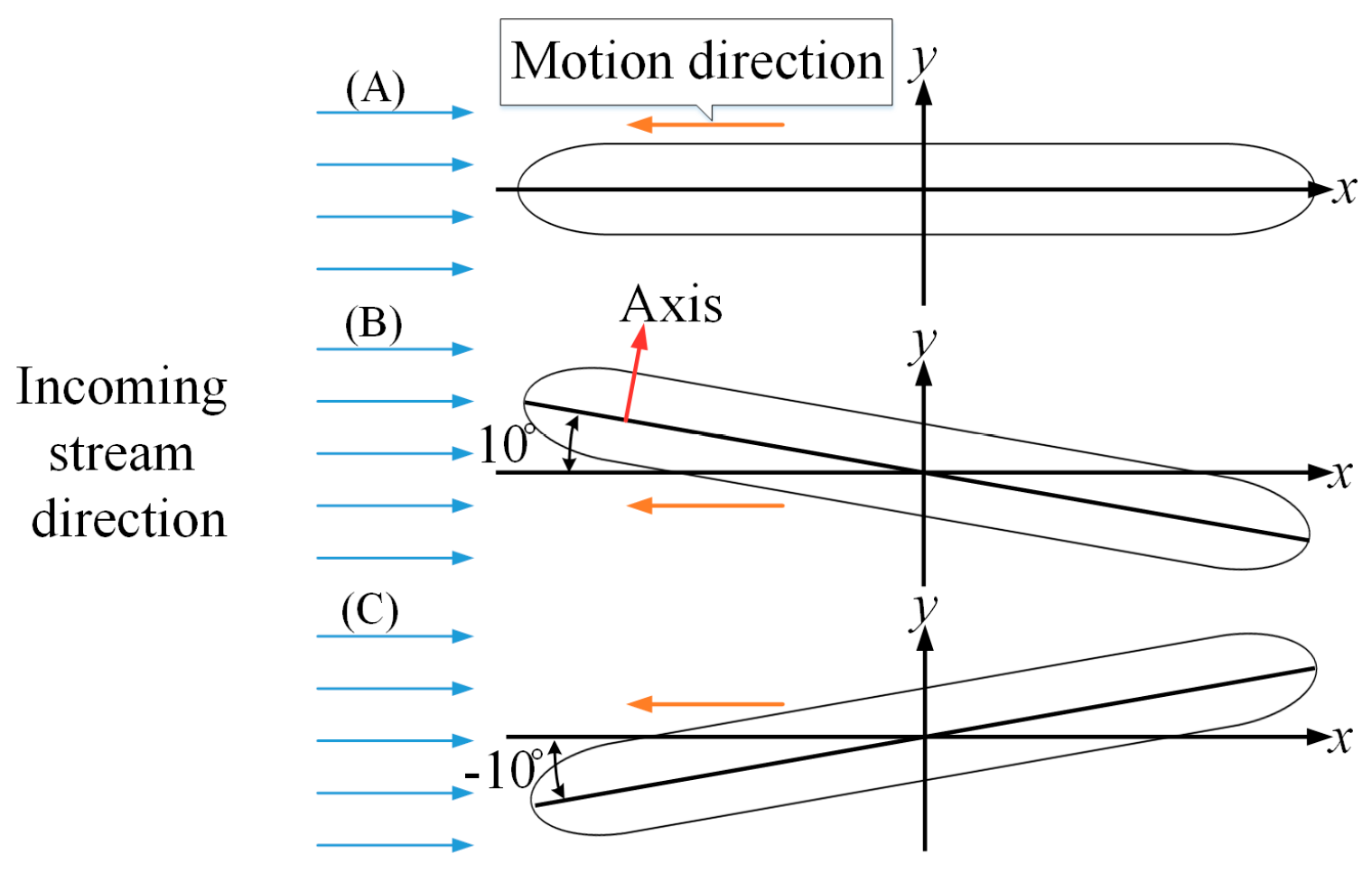
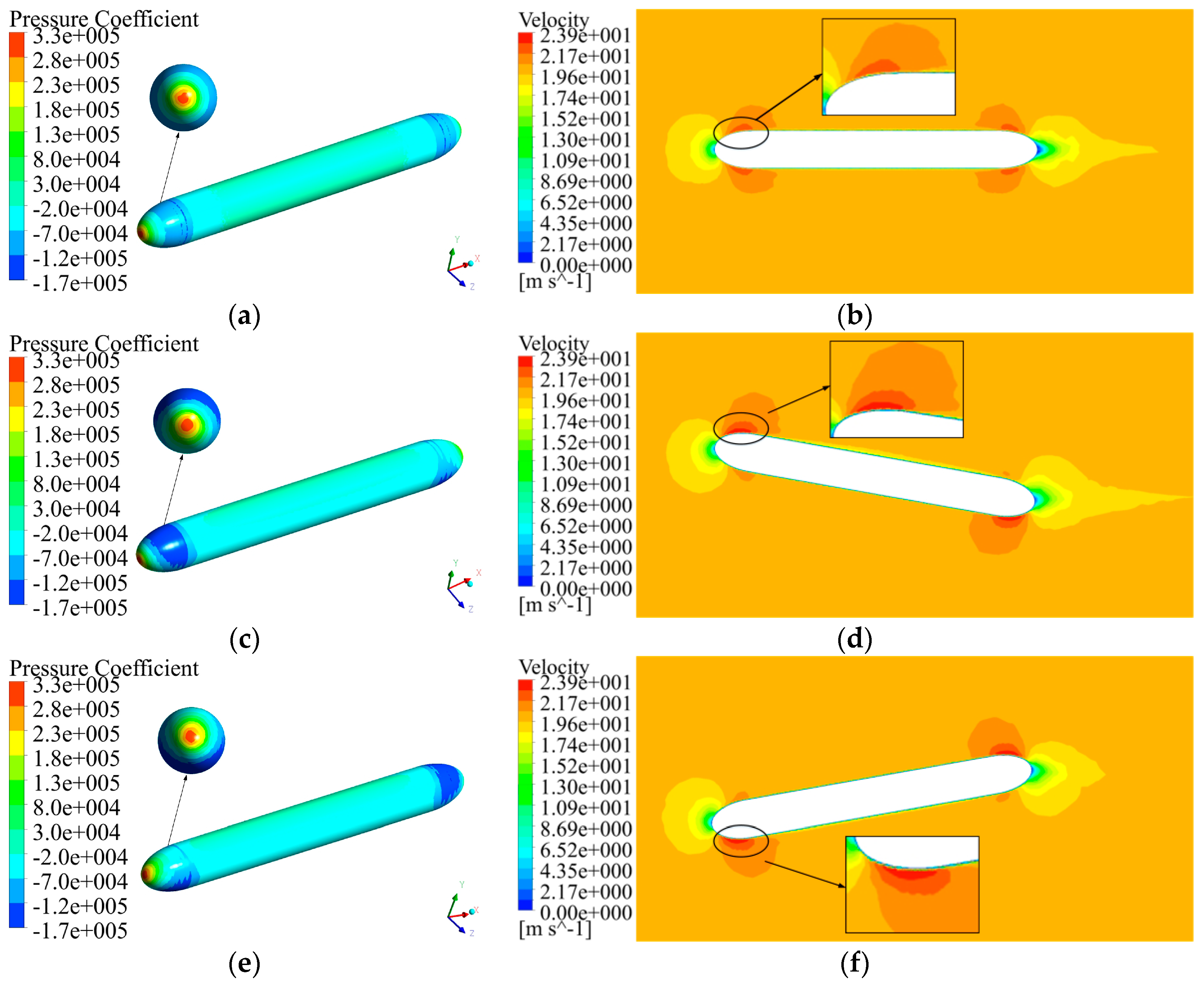
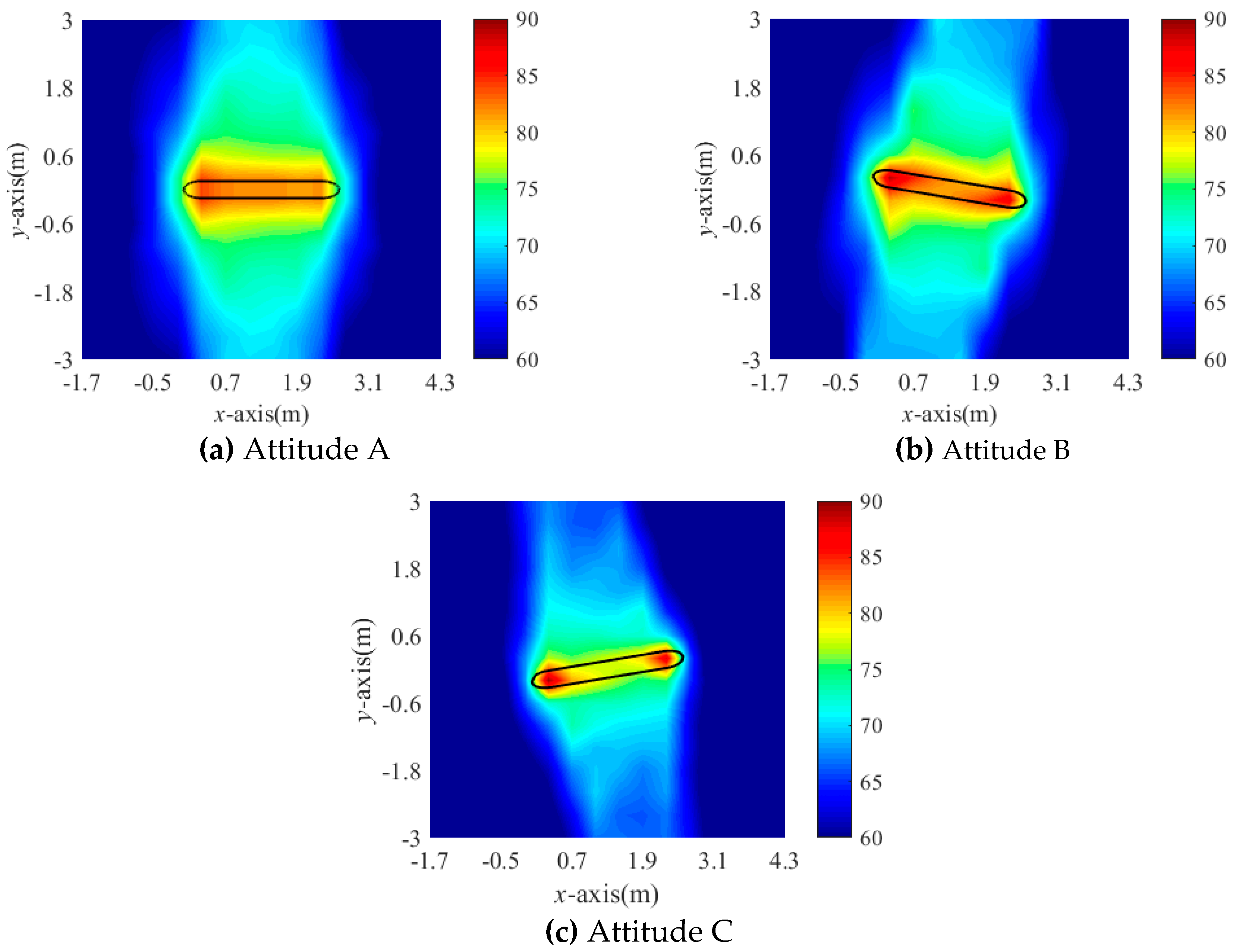
4.2. Numerical Calculation Results and Analysis
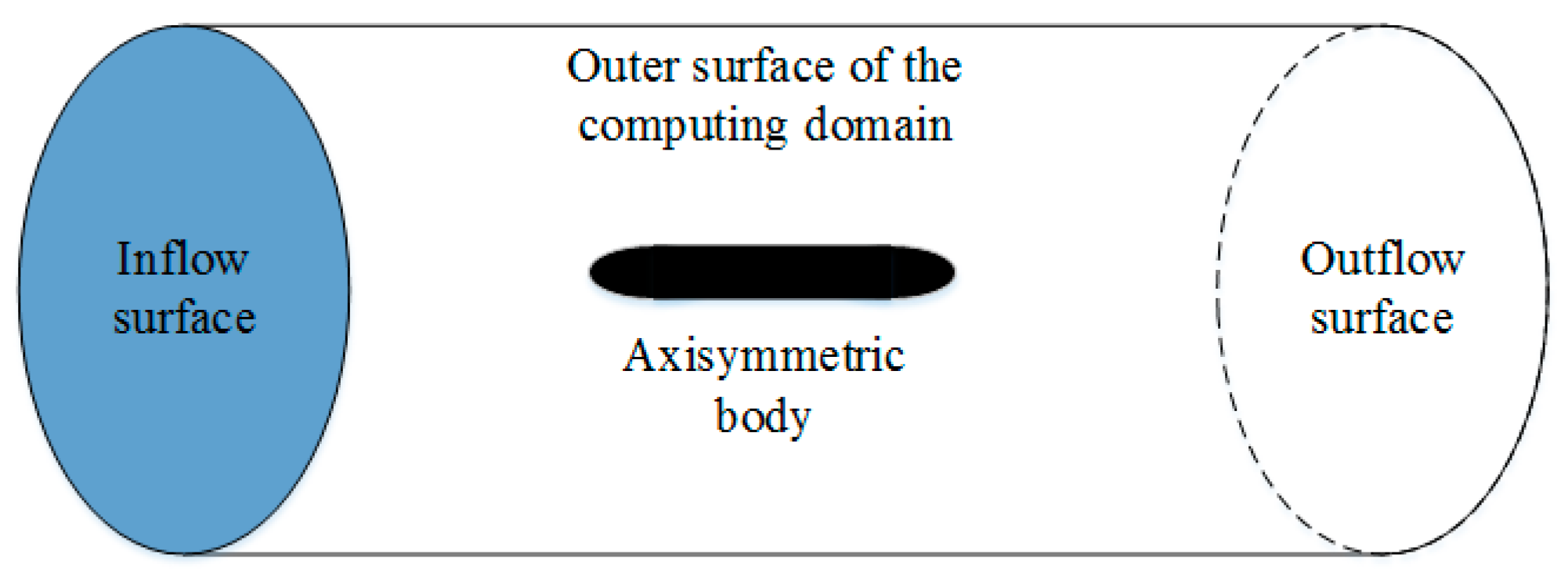
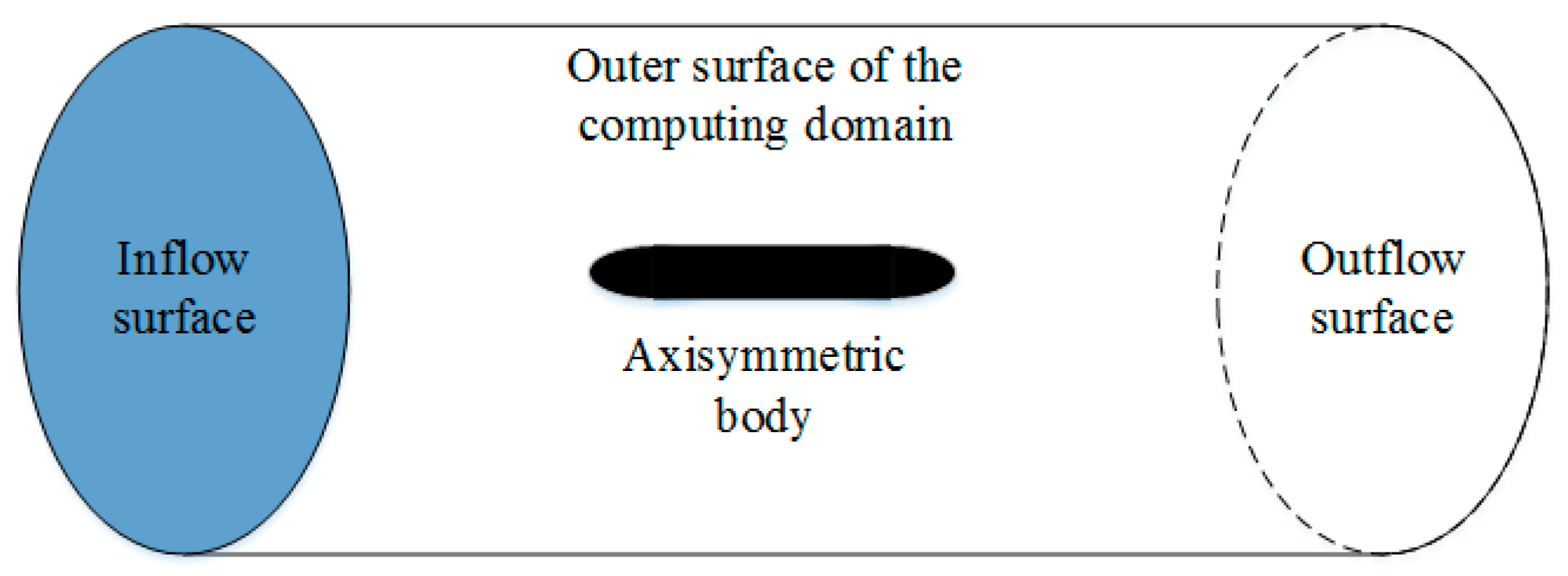
- Establishing a model. The model is established with reference to the actual size. The ratio is 1:1. The three-dimensional computing domain used in CFD is shown in Figure 5.
- Meshing the grid. The grid is chosen as body grid in the calculation of CFD. To fully capture the wall turbulent fluctuating pressure, the boundary layer grid is used in the meshing for the hydrophone solid wall surface.
- Setting flow field boundary conditions. The flow field calculation boundary conditions are shown in the Table 1.
- Selecting a flow field turbulence model and solver. The renormalization group (RNG) k-ε two equation turbulent models are chosen in the flow field calculation. The finite volume method (FVW) is used to discrete the governing equations. Three-dimensional, discrete, implicit, and unsteady solvers are set in the FLUENT software.
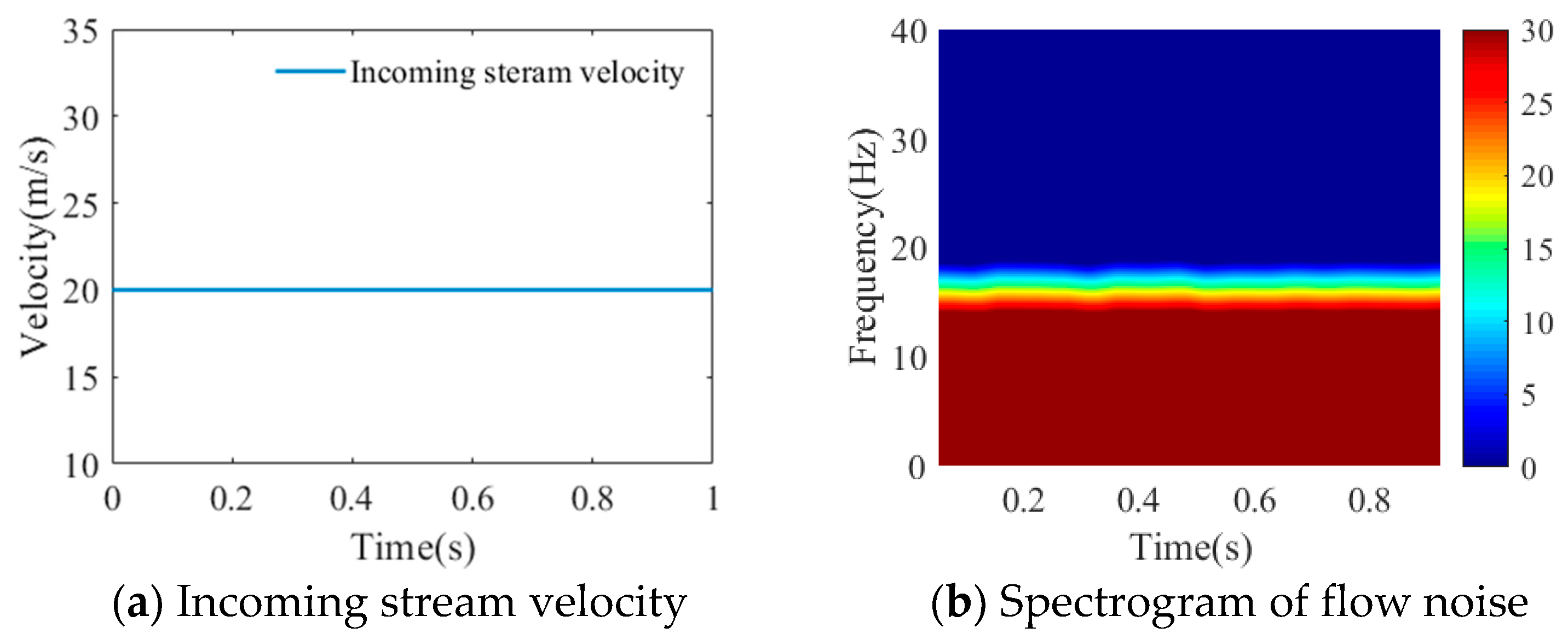
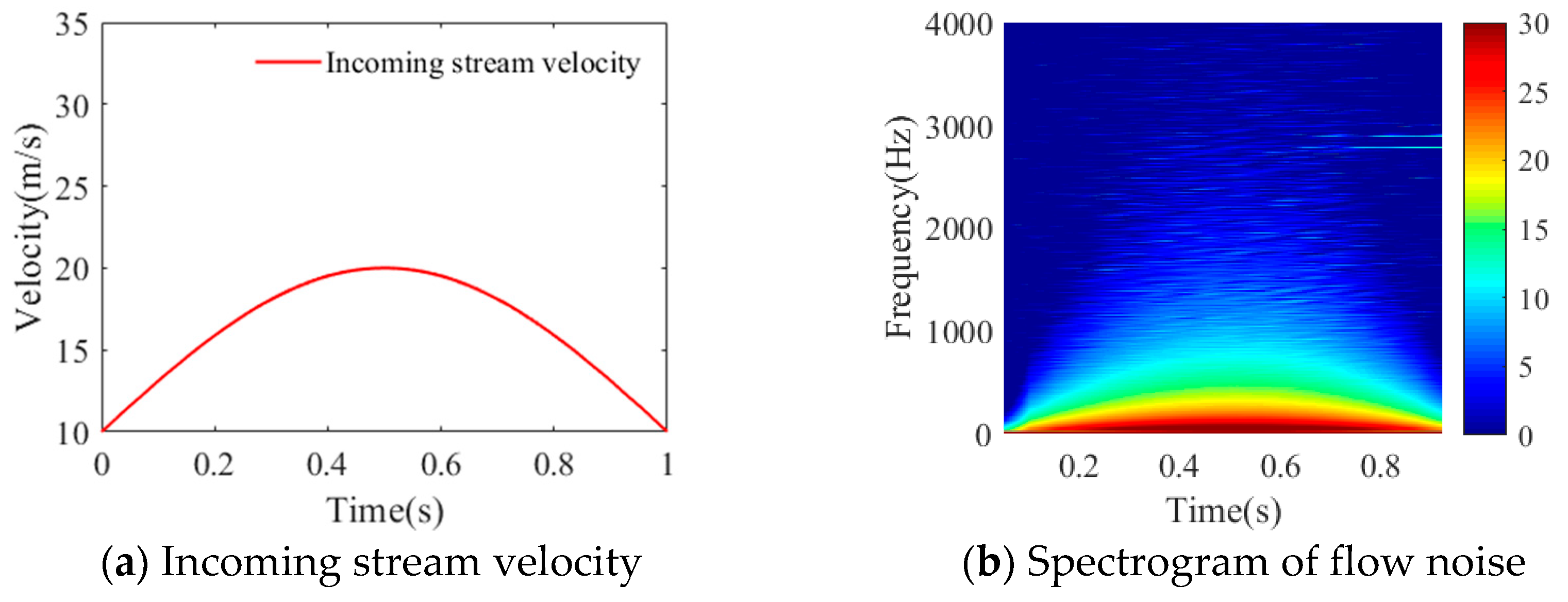
- Setting flow field calculation parameters. To obtain high-frequency flow noise, the time step is set to be 0.01 ms, the flow velocity of the inflow surface is 20 m/s, and the liquid density is 1000 Kg/m3.
- Computing the flow field. Ensuring calculation has converged by the two criterions: The residual of the calculation parameters decreases with the increase of iteration times and then tends to be stable; the values of observation points do not change with the number of iterations.
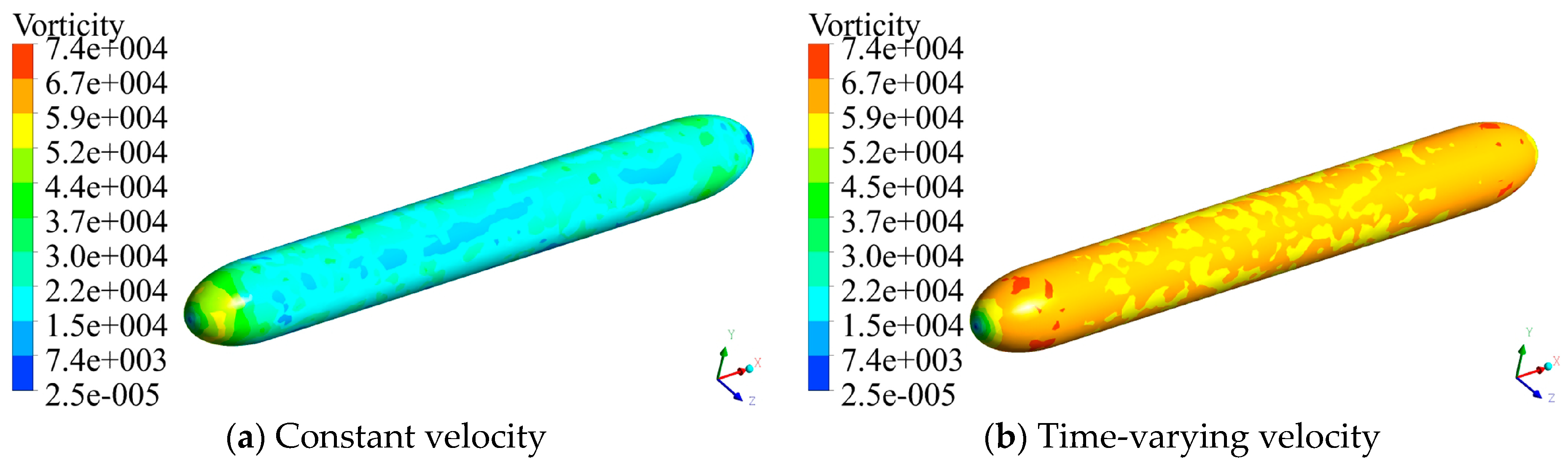
- Setting sound field calculation parameters’ boundary conditions. The reference sound pressure is 1 μPa, and the sound speed is 1500 m/s. The wall of the axisymmetric body is chosen as the noise source zone. The sound pressure receiver is set at the stagnation point.
- Computing the sound field. At first, the unsteady flow field is computed by solving the NS equations. Then, the FW-H integration approach is used to calculate the sound field.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, Y.M.; Li, Y.L.; Shang, D.J. The generation mechanism of the flow-induced noise from a sail hull on the scaled submarine model. Appl. Sci. 2019, 9, 106. [Google Scholar] [CrossRef]
- Abshagen, J.; Nejedl, V. Towed body measurement of flow noise from a turbulent boundary layer under sea conditions. J. Acoust. Soc. Am. 2014, 135, 637–645. [Google Scholar] [CrossRef] [PubMed]
- Crighton, D.G.; Dowling, A.P.; Williams, J.E.F.; Heckl, M.; Leppington, F.G. Flow Noise on Surfaces. In Modern Methods in Analytical Acoustics; Springer: London, UK, 2016. [Google Scholar]
- Li, X.G.; Yang, K.D.; Wang, Y. The diffracted sound field from the transition region of an axisymmetric body in water. Chin. Phys. B. 2011, 20. (In Chinese) [Google Scholar] [CrossRef]
- Li, X.G.; Yang, K.D.; Mang, Y.L. Flow-noise calculation using the mutual coupling between vulcanized rubber and the flow around in water. Chin. Phis. Lett. 2012, 29. [Google Scholar] [CrossRef]
- Gao, J.; Wu, P.G.; Li, T.R. Optimization-based model reference adaptive control for dynamic positioning of a fully actuated underwater vehicle. Nonlinear Dyn. 2017, 87, 2611–2623. [Google Scholar] [CrossRef]
- Jagadeesh, P.; Murali, K.; Idichandy, V.G. Experimental investigation of hydrodynamic force coefficients over AUV hull form. Ocean Eng. 2009, 36, 113–118. [Google Scholar] [CrossRef]
- Skudrzy, E.A.; Haddle, G.P. Noise production in turbulent boundary layer by smooth and rough surfaces. J. Acoust. Soc. Am. 1960, 32, 19–34. [Google Scholar] [CrossRef]
- Lauchle, G.C. Noise generated by axisymmetric turbulent boundary-layer flow. J. Acoust. Soc. Am. 1977, 61, 694–703. [Google Scholar] [CrossRef]
- Lauchle, G.C. On the radiated noise due to boundary-layer transition. J. Acoust. Soc. Am. 1980, 67, 158–168. [Google Scholar] [CrossRef]
- Lauchle, G.C. Flow noise scaling at the stagnation point of an axisymmetric body. J. Sound. Vib. 1992, 154, 568–572. [Google Scholar] [CrossRef]
- Arakeri, V.H.; Satyanarayana, S.G.; Mani, K.; Sharma, S.D. Studies on scaling of flow noise received at the stagnation point of an axisymmetric body. J. Sound. Vib. 1991, 146, 449–462. [Google Scholar] [CrossRef]
- Li, X.G.; Yang, K.D.; Wang, Y. The power spectrum and correlation of flow noise for an axisymmetric body in water. Chin. Phys. B. 2011, 20. [Google Scholar] [CrossRef]
- Kim, J.; Park, I.R.; Van, S.H.; Kim, W.J. Calculation of Turbulent Flows around a Submarine for the Prediction of Hydrodynamic Performance. SOTECH. 2003, 7, 16–31. [Google Scholar]
- Yao, H.L.; Zhang, H.X.; Liu, H.T.; Jiang, W.C. Numerical study of flow-excited noise of a submarine with full appendages considering fluid structure interaction using the boundary element method. Eng. Anal. Bound. Elem. 2017, 77, 1–9. [Google Scholar] [CrossRef]
- Lighthill, M.J. On sound generated aerodynamically. 1. General theory. Proc. R. Soc. Lond. Ser. A. 1952, 211, 564–587. [Google Scholar]
- Lighthill, M.J. On sound generated aerodynamically. 2. Turbulence as a source of sound. Proc. R. Soc. Lond., Ser. A. 1954, 222, 1–32. [Google Scholar]
- Williams, J.E.; Hawkings, D.L. Sound generation by turbulence and surfaces in arbitrary motion. Philos. Trans. R. Soc. 1969, 264, 321–342. [Google Scholar] [CrossRef]
- Farassat, F.; Succi, G.P. The Prediction of Helicopter Discrete Frequency Noise. Vertica 1983, 7, 309–320. [Google Scholar]
- Farassat, F.; Brentner, K.S. Supersonic quadrupole noise theory for high-speed helicopter rotors. J. Sound Vib. 1998, 218, 481–500. [Google Scholar] [CrossRef]
- Farassat, F.; Brentner, K.S. The acoustic analogy and the prediction of the noise of rotating blades. Theor. Comp. Fluid Dyn. 1998, 10, 155–170. [Google Scholar] [CrossRef]
- Gross, A.; Jagadeesh, C.; Fasel, H. Numerical investigation of three-dimensional separation on axisymmetric bodies at angle of attack. In Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012. [Google Scholar]
- Gross, A.; Kremheller, A.; Fasel, H. Simulation of flow over suboff bare hull model. In Proceedings of the 49th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2011. [Google Scholar]
- Shi, Y.; Pan, G.; Huang, Q.G. LES-based numerical simulation of flow noise for UUV with full appendages. Adv. Mater. Res. 2013, 631–632, 879–884. [Google Scholar]
- Ramesh, S.S.; Meng, L.K.; Cheong, K.B. On the prediction of self-noise due to supercavitating underwater vehicle moving at subsonic speed using boundary element approach. In Proceedings of the ECUA 2012 11th European Conference on Underwater Acoustics, Edinburgh, UK, 2–6 July 2012. [Google Scholar]
- Liu, Q.M.; Gao, X. Research on the virtual reality of impact of appendages on the flow characteristics of submarines based on neural networks and CFD. Neural Comput. Appl. Mar. 2018, 29, 1293–1301. [Google Scholar] [CrossRef]
- Gungor, E. Hydroacoustical investigation on an generic underwater vehicle using Lighthill-Curle. J. Fac. Eng. Archit. Gaz. 2019, 34, 1352–1364. [Google Scholar]
- Lauchle, G.C. Transition noise-the role of fluctuating displacement thickness. J. Acoust. Soc. Am. 1981, 69, 665–671. [Google Scholar] [CrossRef]
- Littell, H.S.; Eaton, J.K. Unsteady flowfield behind a vortex generator rapidly pitched to angle of attack. AIAA. J. Apr. 1991, 29, 577–584. [Google Scholar] [CrossRef]
- Josserand, M.A.; Lauchle, G.C. Modeling the wavevector-frequency spectrum of boundary-layer wall pressure during transition on a flat plate. J. Vib. Acoust. 1990, 112, 523–524. [Google Scholar] [CrossRef]
- Hess, J.L.; Smith, A.M.O. Calculation of potential flow about arbitrary bodies. Prog. Aerosp. Sci. 1967, 8, 1–138. [Google Scholar] [CrossRef]
- Lee, C.S.; Young, K.G.; Lee, J.T. A potential-based panel method for the analysis of a two-dimensional super-or partially-cavitating hydrofoil. J. Ship. Res. 1992, 36, 168–181. [Google Scholar]
- Huang, J.Q.; Zhang, Y.W. Fluid Mechanics for Torpedoes; Northwestern Polytechnical University Press: Xi’an, China, 1989. (In Chinese) [Google Scholar]
- Hutter, K.; Wang, Y. Simple Solutions of Boundary Layer Equations. In Fluid and Thermodynamics. Advances in Geophysical and Environmental Mechanics and Mathematics; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Zhang, N.; Shen, H.; Tian, Y. Computation of wall pressure fluctuations and flow induced noise by large eddy simulation. J. Acoust. Soc. Am. 2012, 131, 3333. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Zone | Boundary Conditions |
|---|---|
| Inflow surface Outflow surface Outer surface of the calculation domain Outer wall of the axisymmetric body | velocity-inlet outflow symmetry plane non-slide wall |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, C.; Yang, K.; Li, H.; Zhang, Y. The Flow Noise Calculation for an Axisymmetric Body in a Complex Underwater Environment. J. Mar. Sci. Eng. 2019, 7, 323. https://doi.org/10.3390/jmse7090323
Huang C, Yang K, Li H, Zhang Y. The Flow Noise Calculation for an Axisymmetric Body in a Complex Underwater Environment. Journal of Marine Science and Engineering. 2019; 7(9):323. https://doi.org/10.3390/jmse7090323
Chicago/Turabian StyleHuang, Chunlong, Kunde Yang, Hui Li, and Yukun Zhang. 2019. "The Flow Noise Calculation for an Axisymmetric Body in a Complex Underwater Environment" Journal of Marine Science and Engineering 7, no. 9: 323. https://doi.org/10.3390/jmse7090323
APA StyleHuang, C., Yang, K., Li, H., & Zhang, Y. (2019). The Flow Noise Calculation for an Axisymmetric Body in a Complex Underwater Environment. Journal of Marine Science and Engineering, 7(9), 323. https://doi.org/10.3390/jmse7090323