A Numerical Investigation on the Flooding Process of Multiple Compartments Based on the Volume of Fluid Method


Abstract
:1. Introduction
2. Methodology
2.1. Realizable k- Turbulence Model
2.2. Basic Equations of the VOF Model
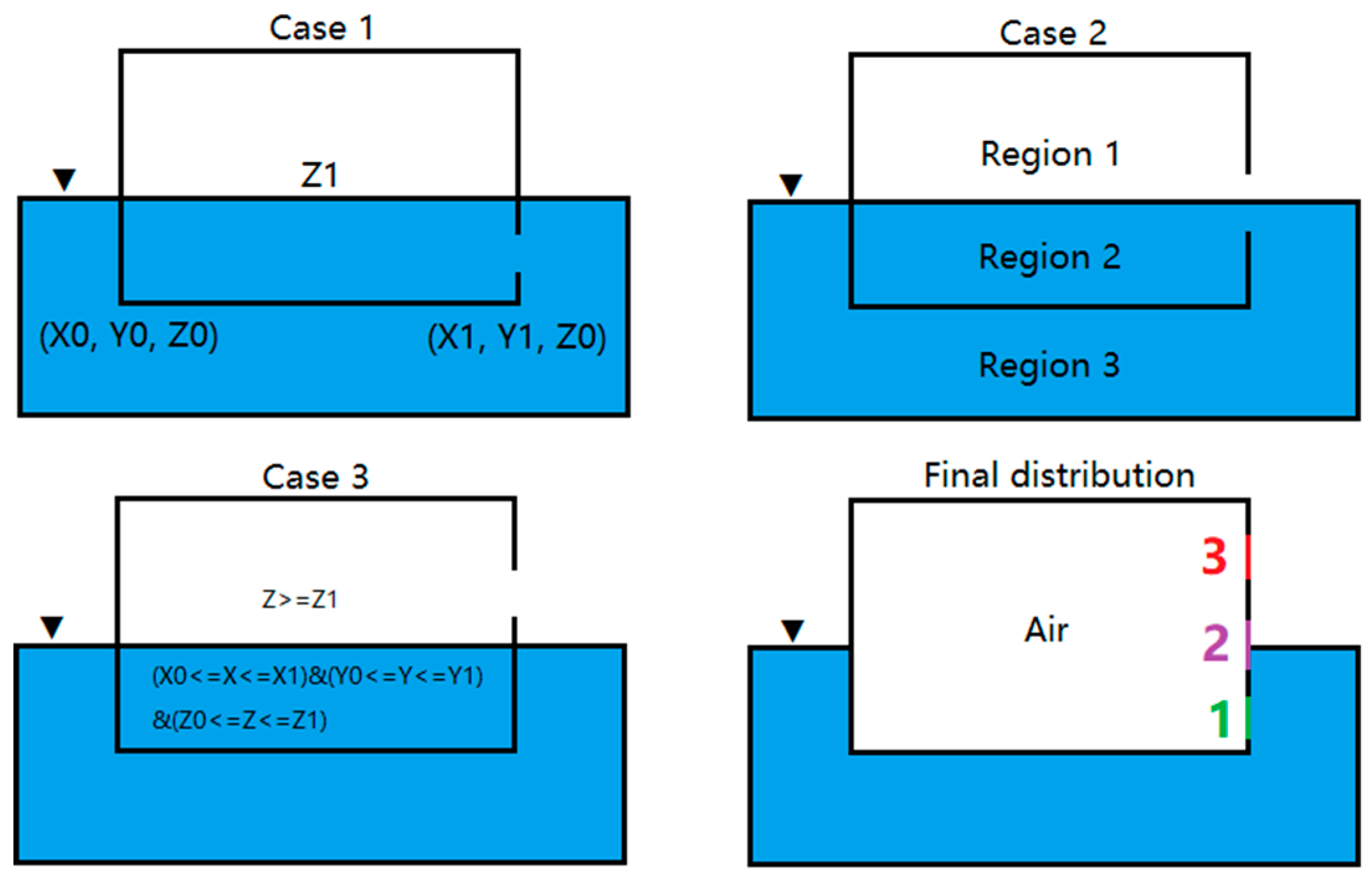
2.3. User Defined Field Function
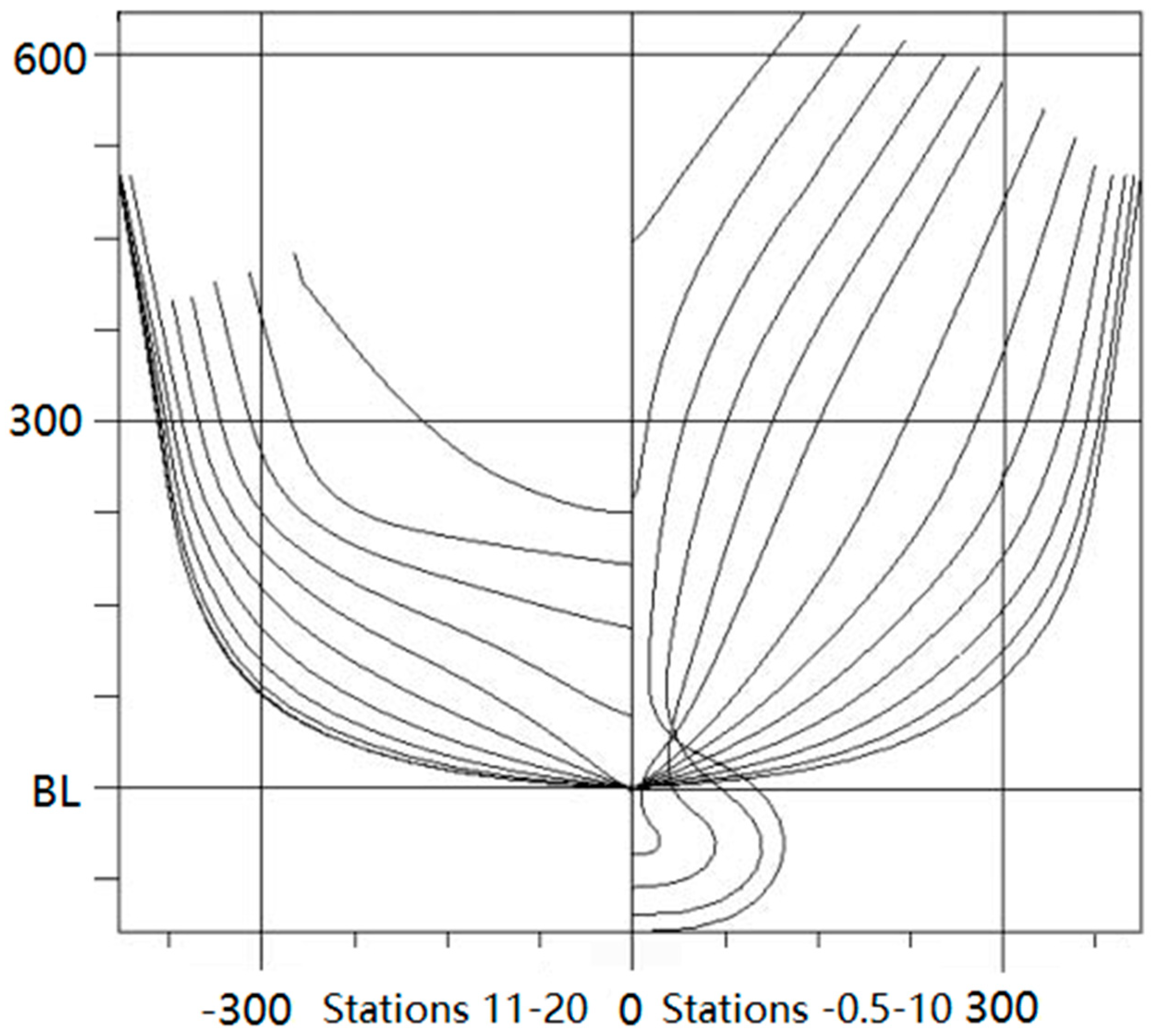
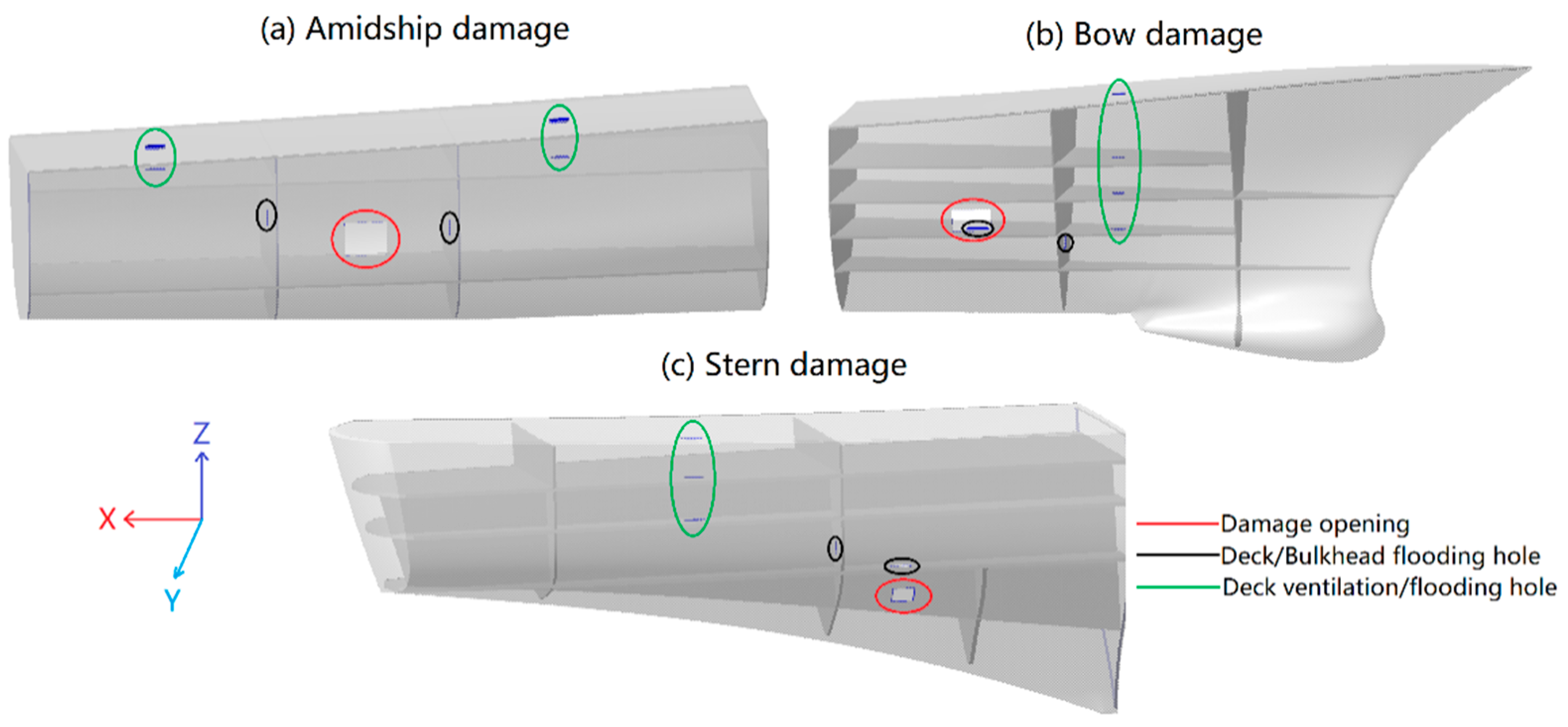
3. Description of DTMB Model 5415
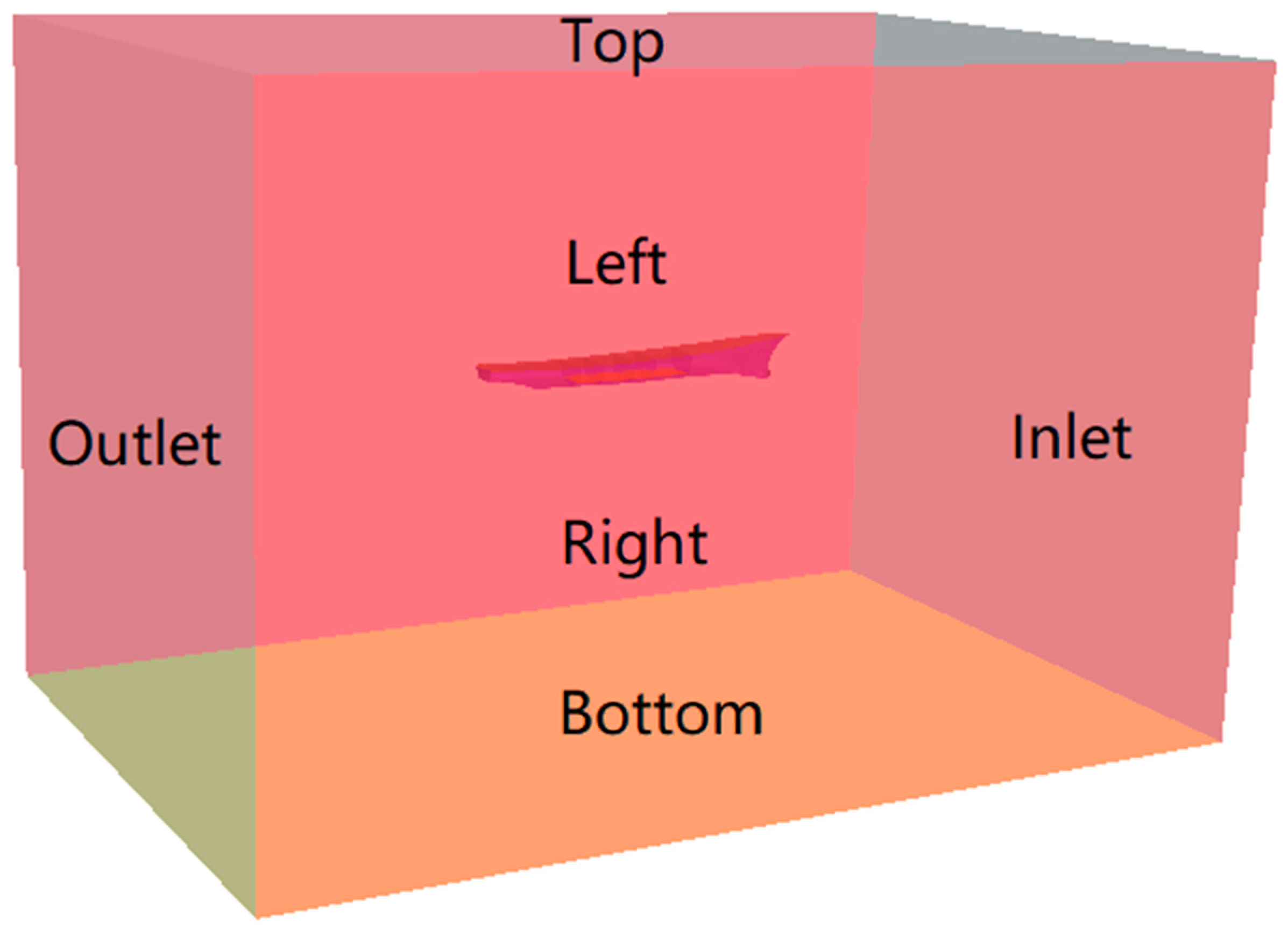
4. Numerical Setup
5. Simulation Results
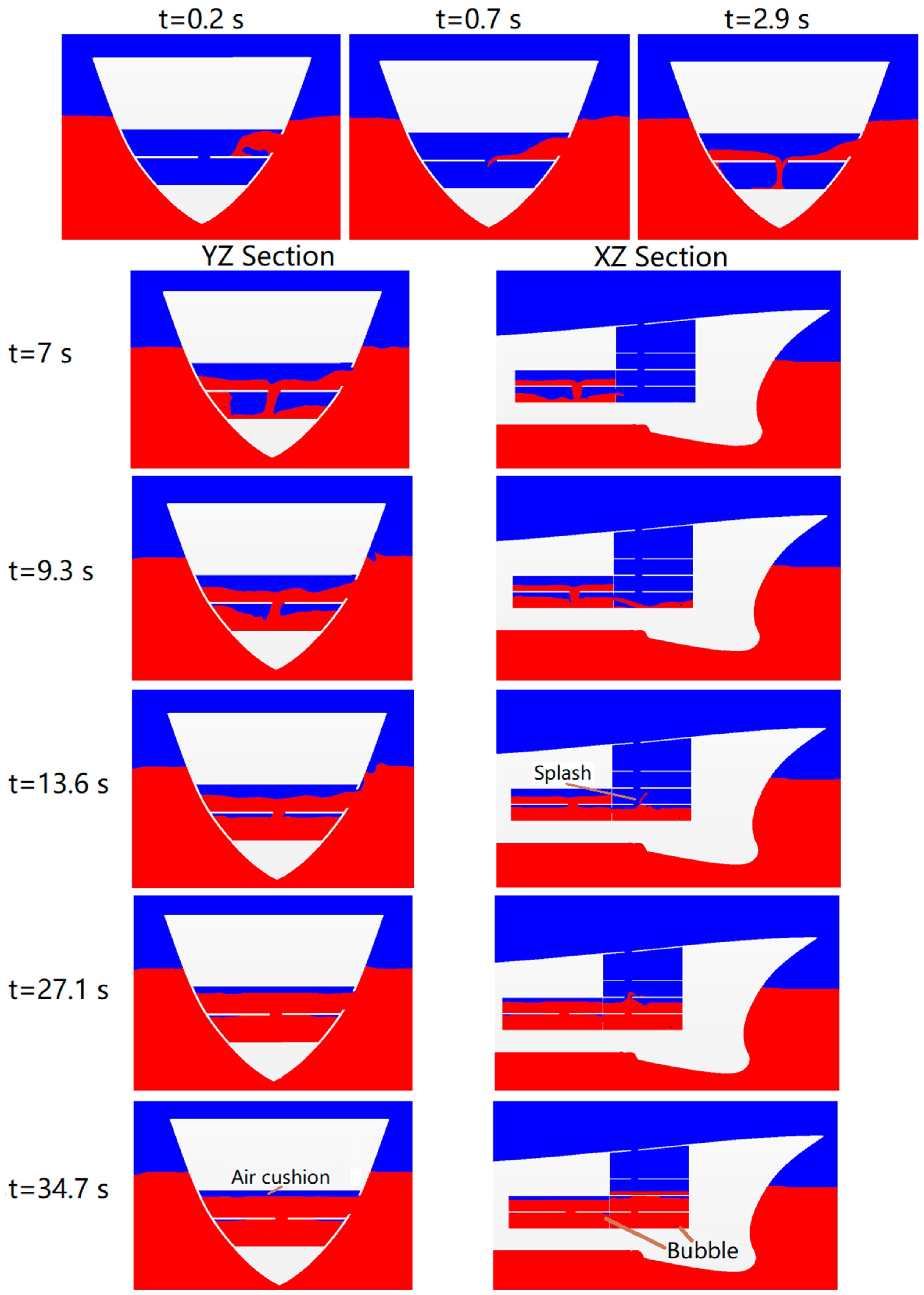
5.1. Amidship Damage
5.1.1. Transient Flooding Stage
5.1.2. Air Compressibility in the Damaged Compartment
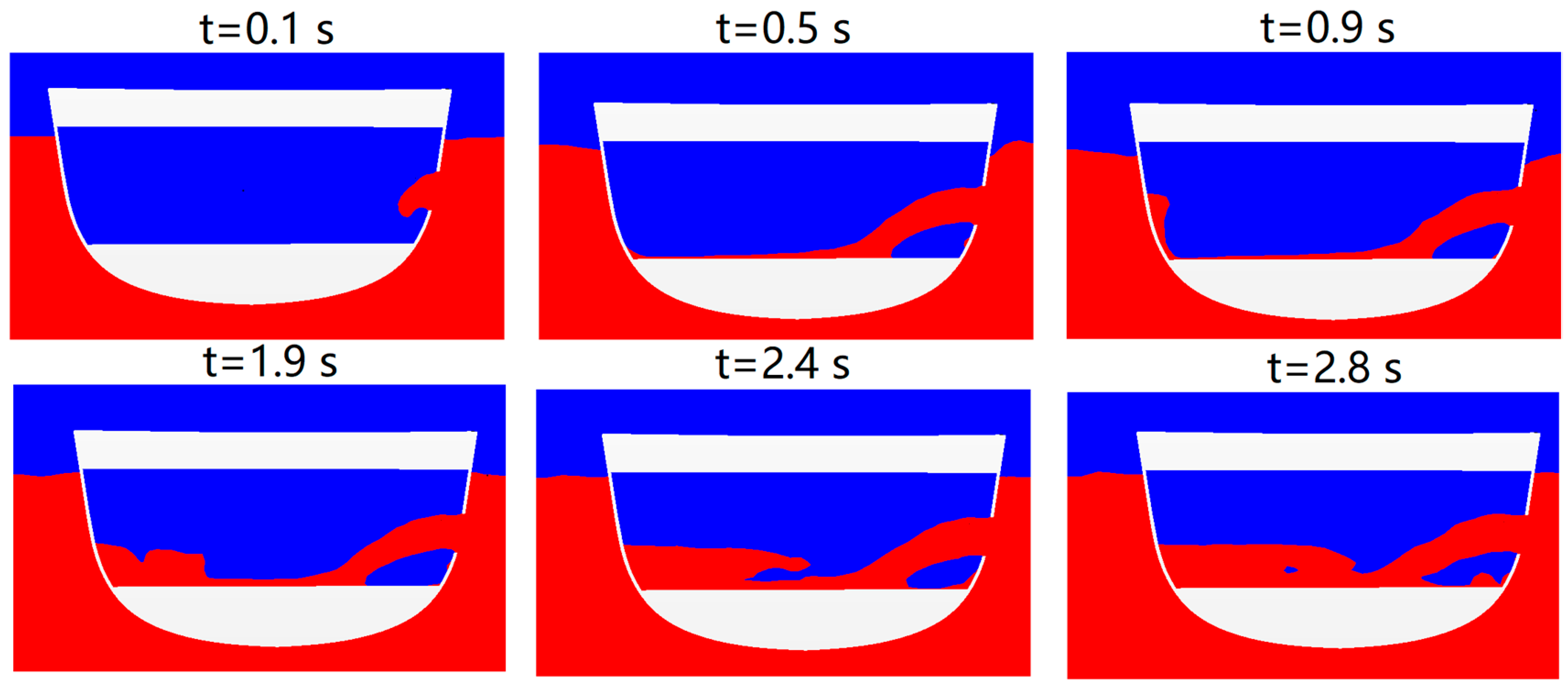
5.2. Bow Damage
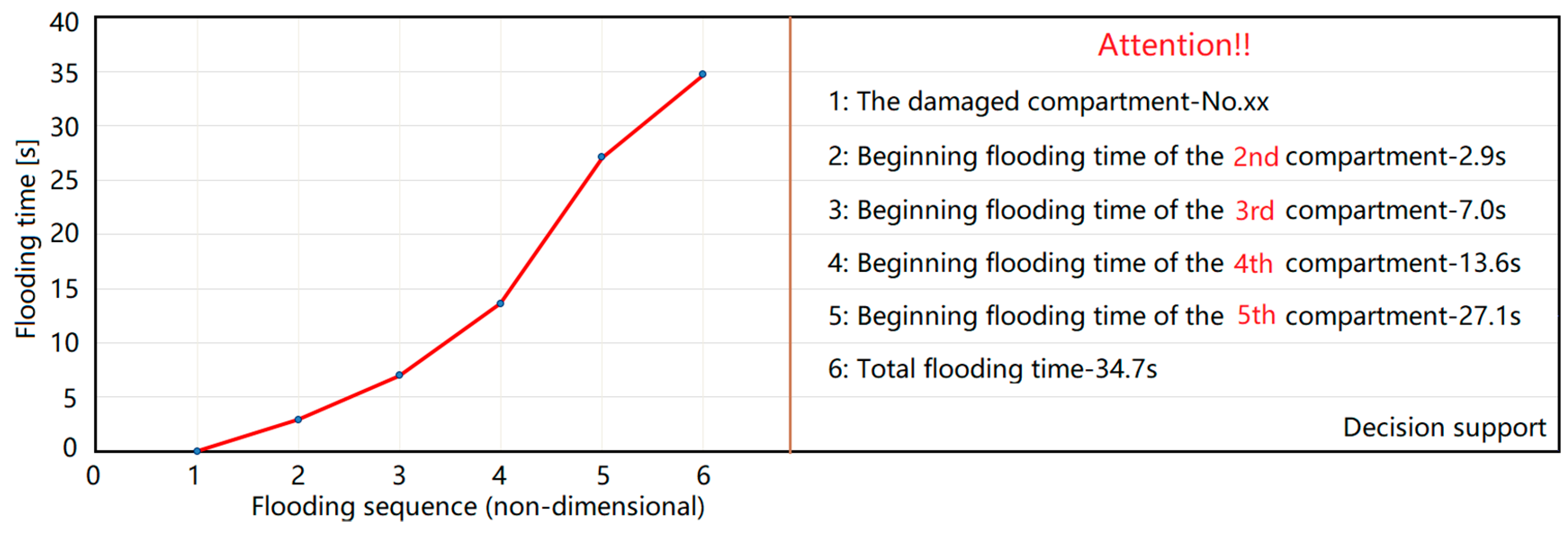
5.2.1. Analysis of the Bow Damage Flooding
5.2.2. Rescue Management on the Basis of the Flooding Time
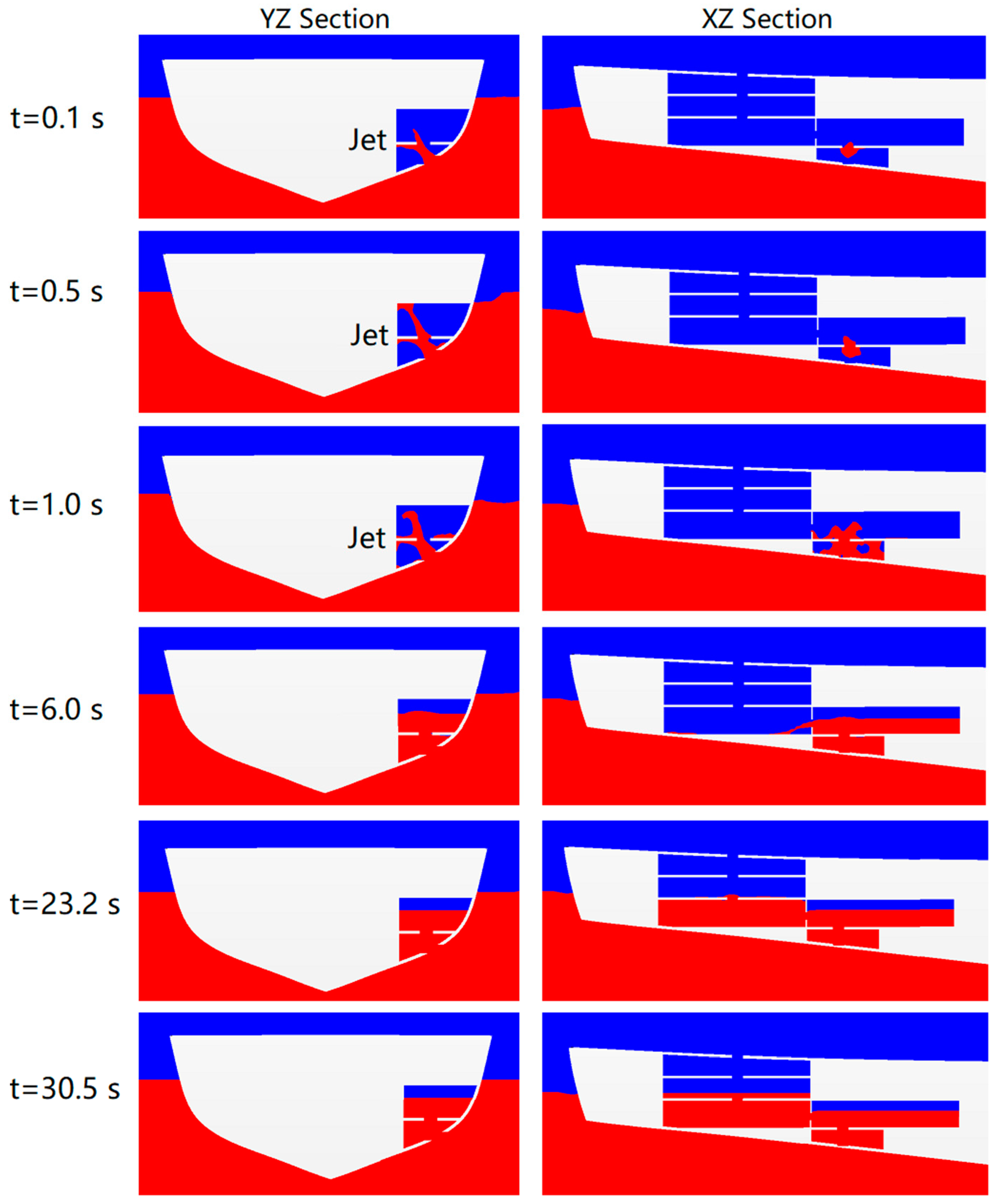
5.3. Stern Damage
5.3.1. Analysis of the Stern Damage Flooding
5.3.2. Possibilities of Evacuation and Counter Actions on the Basis of the Flooding Time
6. Conclusions and Future Researches
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gao, Z.; Vassalos, D. The dynamics of the floodwater and damaged ship in waves. J. Hydrodyn. 2015, 27, 689–695. [Google Scholar] [CrossRef]
- IMO. Large Passenger Ship Safety: Time-to-Flood Simulations for a Large Passenger Ship-Initial Study, IMO SLF46/INF.3 MARIN Report No.17870-1-CPS; IMO: London, UK, 2003; p. 40. [Google Scholar]
- Ruponen, P.; Manderbacka, T.; Lindroth, D. On the calculation of the righting lever curve for a damaged ship. Ocean Eng. 2018, 149, 313–324. [Google Scholar] [CrossRef]
- Gao, Z.; Gao, Q.; Vassalos, D. Numerical simulation of flooding of a damaged ship. Ocean Eng. 2011, 38, 1649–1662. [Google Scholar] [CrossRef]
- The specialist committee on prediction of extreme ship motions and capsizing (chaired by D. Vassalos). In Proceedings of the 23th International Towing Tank Conference (ITTC), Venice, Italy, 2002.
- Stability in Waves Committee, Final Report and Recommendation (chaired by P. Gualeni). In Proceedings of the 28th International Towing Tank Conference (ITTC), Wuxi, China, 2017.
- Rodrigues, J.M.; Lavrov, A.; Hinostroza, M.A.; Guedes Soares, C. Experimental and numerical investigation of the partial flooding of a barge model. Ocean Eng. 2018, 169, 586–603. [Google Scholar] [CrossRef]
- Ruponen, P.; Kurvinen, P.; Saisto, I.; Harras, J. Air compression in a flooded tank of a damaged ship. Ocean Eng. 2013, 57, 64–71. [Google Scholar] [CrossRef]
- Lee, S.; You, J.M.; Lee, H.H.; Lim, T.; Rhee, S.H.; Rhee, K.P. Preliminary tests of a damaged ship for CFD validation. Int. J. Nav. Archit. Ocean Eng. 2012, 4, 172–181. [Google Scholar] [CrossRef] [Green Version]
- Manderbacka, T. Fast Simulation Method for Transient Flooding of a Ship. Ph.D. Thesis, Aalto University, Helsinki, Finland, 2015. [Google Scholar]
- Ruponen, P.; Pulkkinen, A.; Laaksonen, J. A method for breach assessment onboard a damaged passenger ship. Appl. Ocean Res. 2017, 64, 236–248. [Google Scholar] [CrossRef]
- Sadat-Hosseini, H.; Kim, D.H.; Carrica, P.M.; Rhee, S.H. URANS simulations for a flooded ship in calm and regular beam waves. Ocean Eng. 2016, 120, 318–330. [Google Scholar] [CrossRef]
- Skaar, D.; Vassalos, D.; Jasionowski, A. The use of a meshless CFD method in modelling progressive flooding and damaged stability of ships. In Proceedings of the Ninth International Conference on Stability of Ships and Ocean Vehicles, Rio Janeiro, Brazil, 25–29 September 2006; pp. 625–632. [Google Scholar]
- Zhang, X.L.; Lin, Z.; Li, P.; Dong, Y.; Liu, F. Time domain simulation of damage flooding considering air compression characteristic. Water 2019, 11, 796. [Google Scholar] [CrossRef]
- Cao, X.Y.; Ming, F.R.; Zhang, A.M.; Tao, L. Multi-phase SPH modelling of air effect on the dynamic flooding of a damaged cabin. Comput. Fluids 2018, 163, 7–19. [Google Scholar] [CrossRef]
- Palazzi, L.; De Kat, J. Model experiments and simulations of a damaged ship with air flow taken into account. Mar. Technol. 2004, 41, 38–44. [Google Scholar]
- Manderbacka, T.; Mikkola, T.; Ruponen, P.; Matusiak, J. Transient response of a ship to an abrupt flooding accounting for the momentum flux. J. Fluid Struct. 2015, 57, 108–126. [Google Scholar] [CrossRef] [Green Version]
- Acanfora, M.; Begovic, E.; De Luca, F. A Fast Simulation Method for Damaged Ship Dynamics. J. Mar. Sci. Eng. 2019, 7, 111. [Google Scholar] [CrossRef]
- STAR-CCM+ Users’ Guide Version 12.02. CD-Adapco, Computational Dynamics-Analysis & Design; Application Company Ltd.: Melville, NY, USA, 2012.
- Menter, F.R. Eddy Viscosity Transport Equations and Their Relation to the k-ε Model. J. Fluids Eng. 1997, 119, 876–884. [Google Scholar] [CrossRef]
- Lee, Y.; Chan, H.S.; Pu, Y.; Incecik, A.; Dow, R.S. Global Wave Loads on a Damaged Ship. Ships Offshore Struct. 2012, 7, 237–268. [Google Scholar] [CrossRef]
- Gao, Z.; Wang, Y.; Su, Y. Numerical study of damaged ship’s compartment sinking with air compression effect. Ocean Eng. 2018, 147, 68–76. [Google Scholar] [CrossRef]
- Practical Guidelines for ship CFD Application. In Proceedings of the 26th International Towing Tank Conference (ITTC), Rio de Janerio, Brazil, 28 August–3 September 2011.
- Begovic, E.; Day, A.H.; Incecik, A.; Mancini, S. Roll damping assessment of intact and damaged ship by CFD and EFD methods. In Proceeding of the 12th International Conference on the Stability of Ships and Ocean Vehicles, Glasgow, UK, 19–24 June 2015. [Google Scholar]
- Mancini, S.; Begovic, E.; Day, A.H.; Incecik, A. Verification and validation of numerical modelling of DTMB 5415 roll decay. Ocean Eng. 2018, 162, 209–223. [Google Scholar] [CrossRef] [Green Version]
- Risto, J.; Pekka, R.; Mateusz, W.; Hendrik, N.; Sander, V. A Study on Leakage and Collapse of Non-Watertight Ship Doors under Floodwater Pressure. Mar. Struct. 2017, 51, 188–201. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Particulars | Real Ship | Scale Model (1/25) |
|---|---|---|---|
| Length Overall | (m) | 151.1800 | 6.0472 |
| Length between perpendiculars | (m) | 142.0400 | 5.6856 |
| Breadth at Waterline | (m) | 20.0300 | 0.8012 |
| Depth to public spaces deck | D (m) | 12.7400 | 0.5096 |
| Design draft | T (m) | 6.3100 | 0.2524 |
| Volume | V () | 8811.94 | 0.5640 |
| Maximum section area | () | 96.7923 | 0.1549 |
| Block coefficient | 0.4909 | 0.4909 | |
| Prismatic coefficient | 0.6409 | 0.6409 | |
| Midship section coefficient | 0.7658 | 0.7658 | |
| Height of metacenter above keel | KM (m) | 9.4700 | 0.3788 |
| Height of Centre of Gravity above keel | KG (m) | 6.2830 | 0.2513 |
| Metacentric height | GM (m) | 3.1870 | 0.1272 |
| Longitudinal Centre of Gravity | LCG (m) | 71.0200 | 2.8408 |
| Local Parts | Amidship | Bow | Stern | |||
|---|---|---|---|---|---|---|
| Damage Opening | ||||||
| Deck Flooding Hole | ||||||
| Bulkhead Flooding Hole | Radius | 10 mm | ||||
| Deck Ventilation Hole | Radius | 25 mm | Radius | 20 mm | Radius | 15 mm |
| Boundary Name | Boundary Type (This Paper) | Boundary Type [24,25] | Boundary Type [19] |
|---|---|---|---|
| Inlet | Velocity inlet | Velocity inlet | Velocity inlet |
| Outlet | Pressure outlet | Velocity inlet | Pressure outlet |
| Top/Bottom | Velocity inlet | Velocity inlet | Velocity inlet |
| Left/Right | Symmetry plane | Pressure outlet | Symmetry plane |
| Hull | Wall | Wall | Wall |
| Convection Term | Second-order | Second-order | First-order (Default) |
| Temporal Discretization | Second-order | Second-order | First-order (Default) |
| Parameters | Amidship | Bow | Stern |
|---|---|---|---|
| Cell number () | 2.024 | 1.408 | 1.262 |
| CPU time (h) | 161 | 123 | 95 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Lin, Z.; Mancini, S.; Li, P.; Li, Z.; Liu, F. A Numerical Investigation on the Flooding Process of Multiple Compartments Based on the Volume of Fluid Method. J. Mar. Sci. Eng. 2019, 7, 211. https://doi.org/10.3390/jmse7070211
Zhang X, Lin Z, Mancini S, Li P, Li Z, Liu F. A Numerical Investigation on the Flooding Process of Multiple Compartments Based on the Volume of Fluid Method. Journal of Marine Science and Engineering. 2019; 7(7):211. https://doi.org/10.3390/jmse7070211
Chicago/Turabian StyleZhang, XinLong, Zhuang Lin, Simone Mancini, Ping Li, Ze Li, and Fei Liu. 2019. "A Numerical Investigation on the Flooding Process of Multiple Compartments Based on the Volume of Fluid Method" Journal of Marine Science and Engineering 7, no. 7: 211. https://doi.org/10.3390/jmse7070211