Parametric Study on the Free-Fall Water Entry of a Sphere by Using the RANS Method


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Numerical Model
2.1. Governing Equation and Numerical Implement
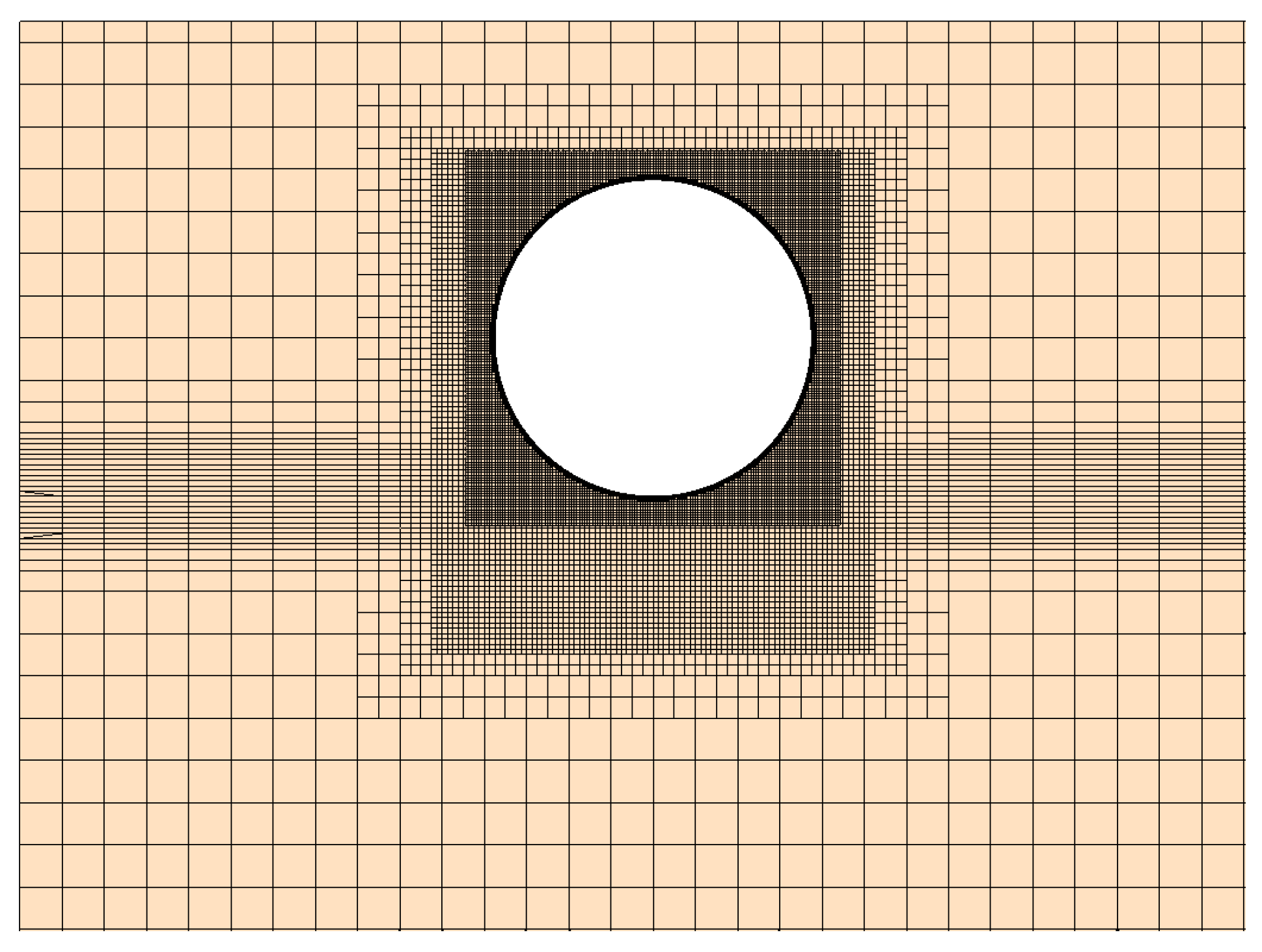
2.2. Fluid Domain and Boundary Conditions
3. Discussion on the Numerical Model
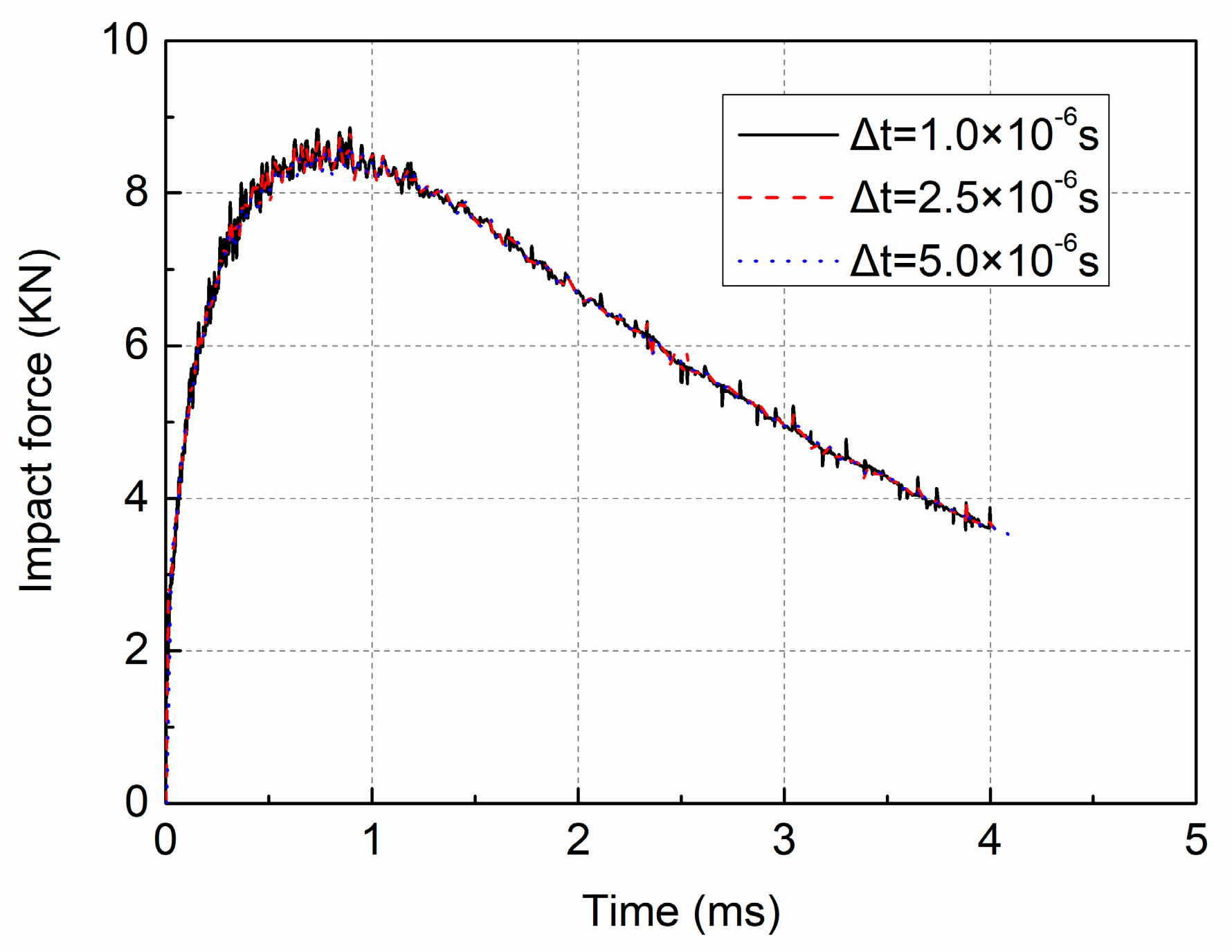
3.1. Convergence Study
3.2. The Effect of the Contact Angle
3.3. Validation
4. Discussion of the Design Parameters
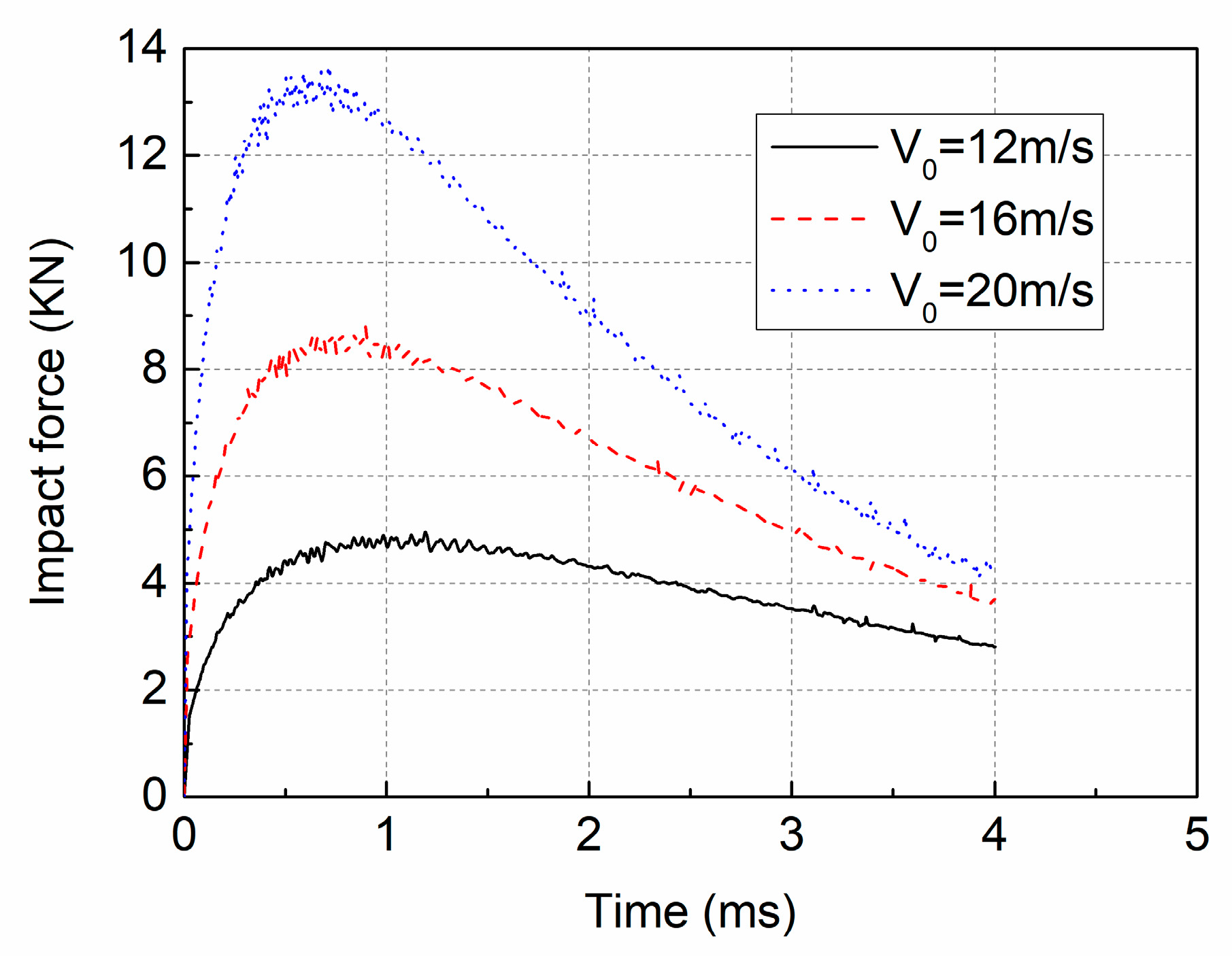
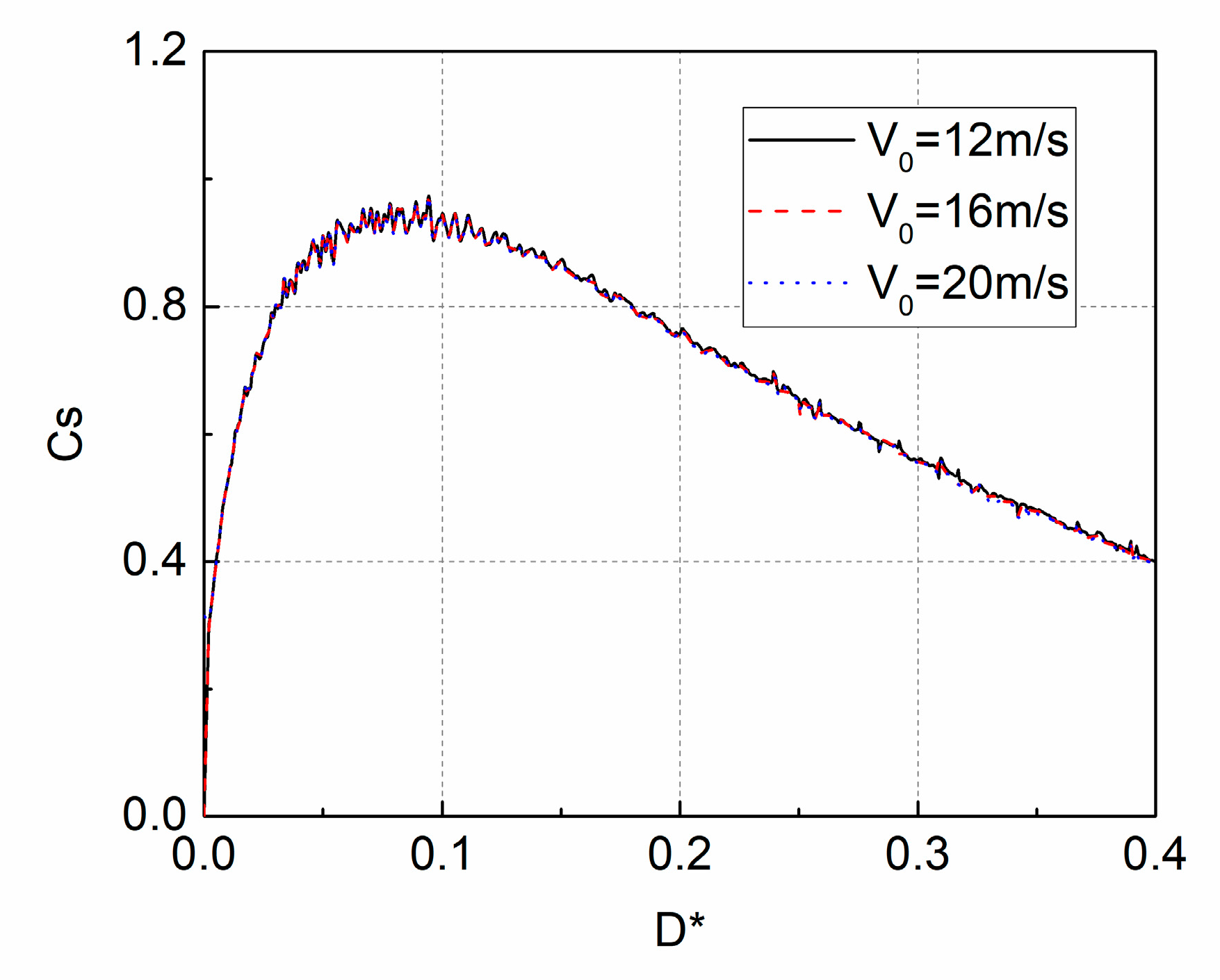
4.1. The Effect of the Impact Velocity
4.2. The Effect of the Radius
4.3. The Effect of the Mass
4.4. Simplified Formulas for the Prediction of Peak Values
5. Conclusions
- (1)
- The sphere with higher impact velocity experienced a larger impact force and larger impact acceleration.
- (2)
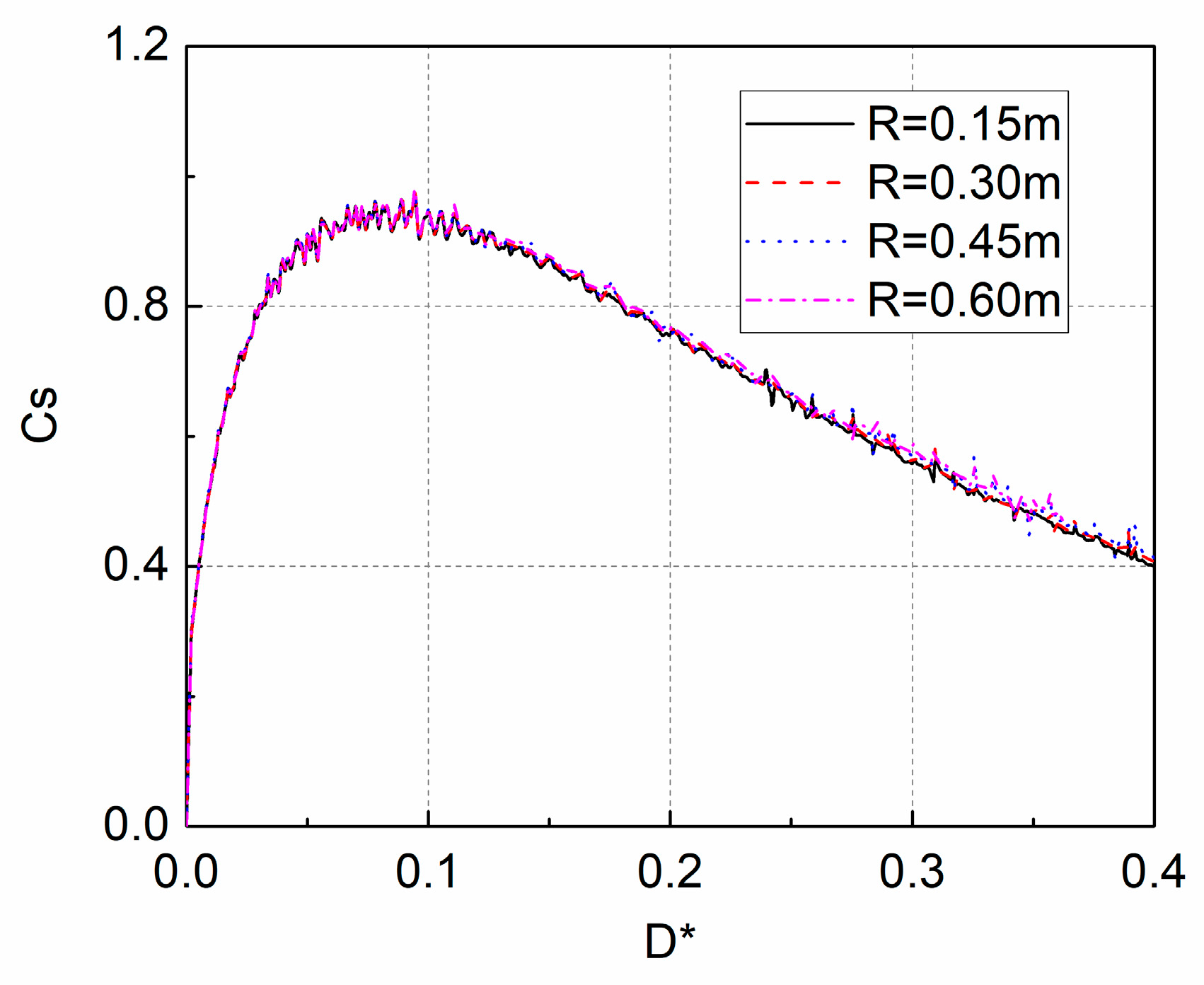
- The sphere with a larger radius experienced a larger impact force and smaller impact acceleration.
- (3)
- By selecting the impact velocity and the radius of the sphere to make the impact force non-dimensional, the contribution of the impact velocity and the radius to impact force was eliminated. It was found that the non-dimensional impact force is independent of the impact velocity and the radius of the sphere.
- (4)
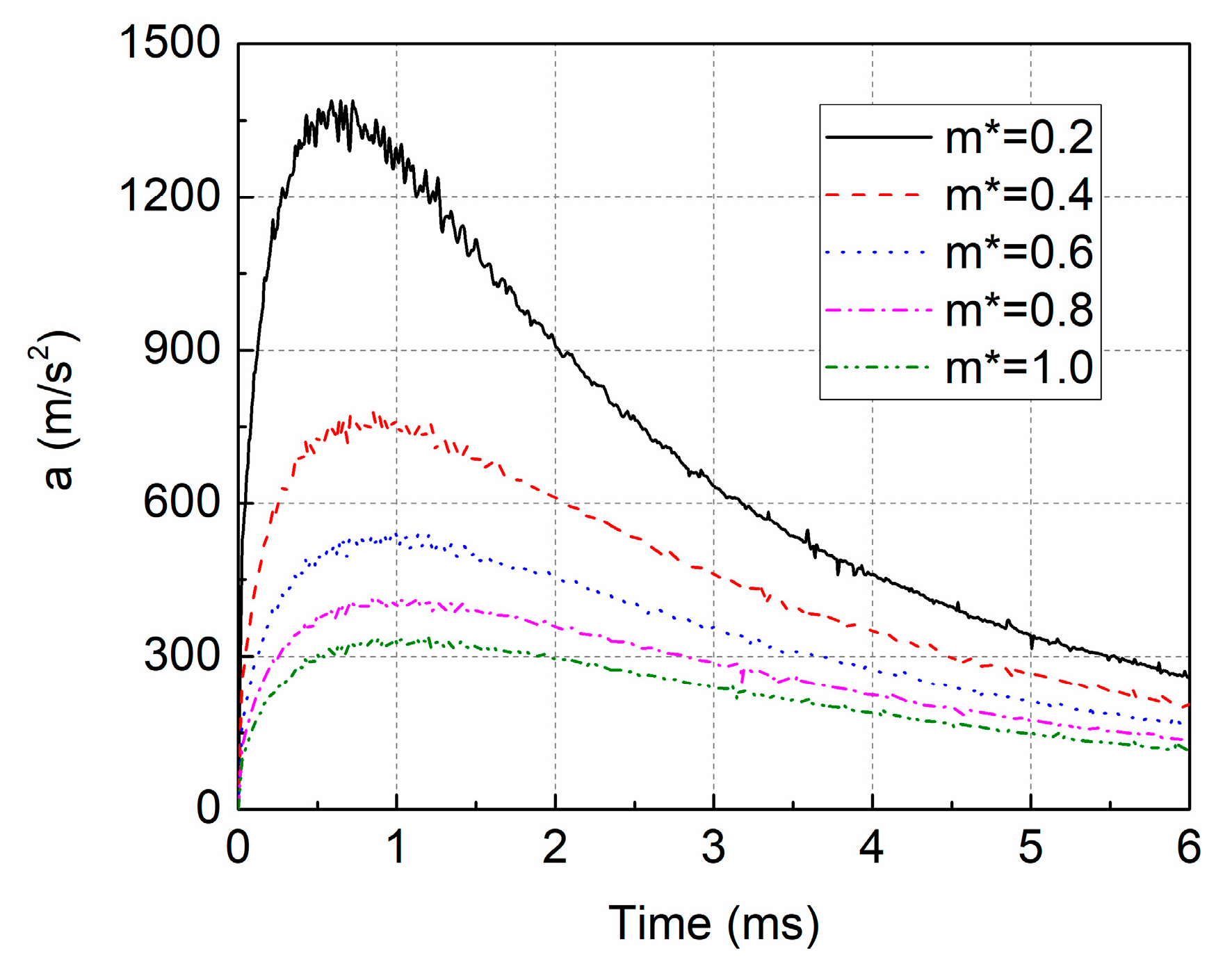
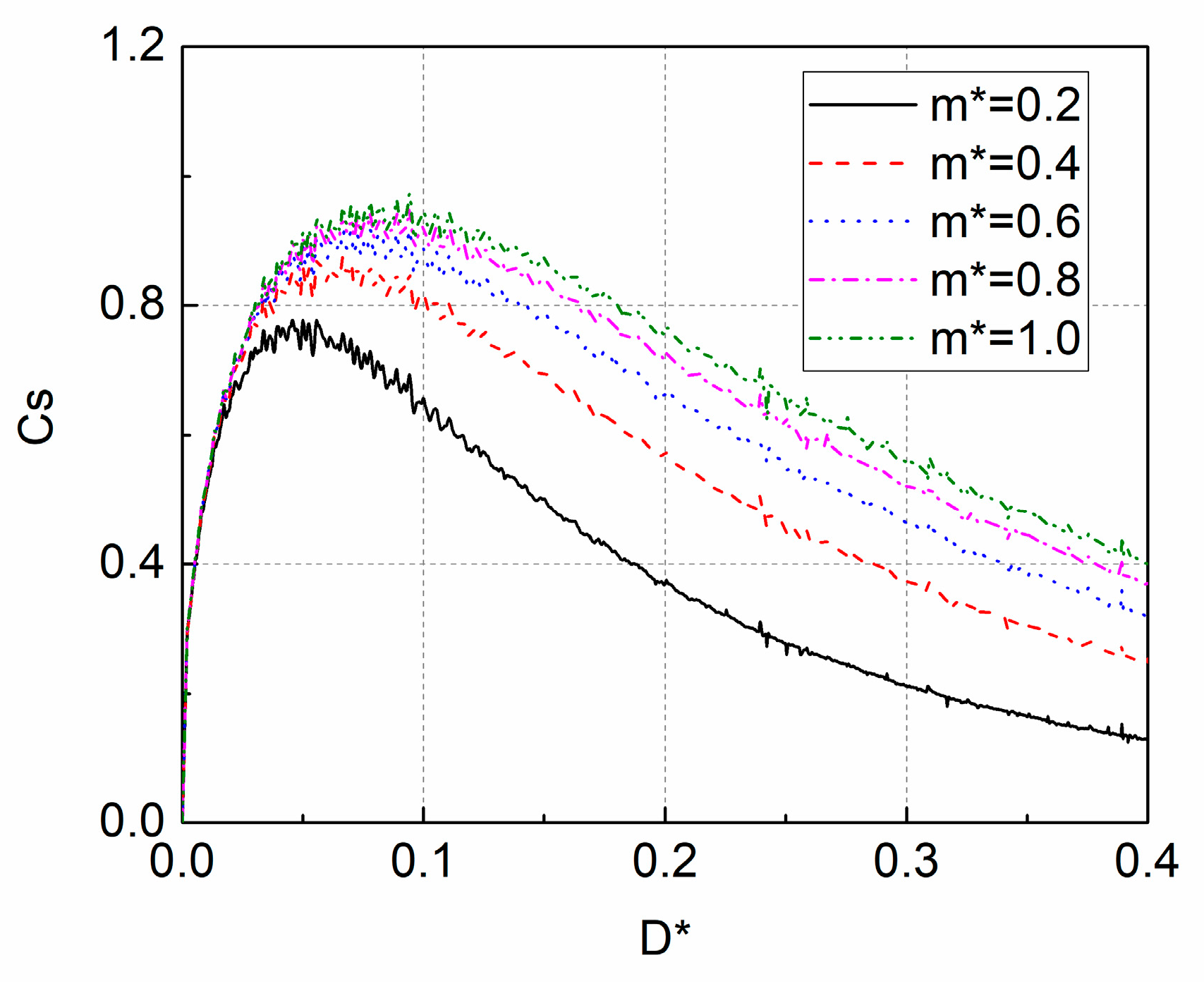
- With an increase in the mass of the sphere, the impact force acting on the sphere decreased, but the acceleration of the sphere increased. The influence of the variation in mass on the impact force and the acceleration became weaker with an increase in mass.
- (5)
- Simplified formulas for the prediction of the peak values of the impact force and acceleration were achieved by fitting the relationship between the peak value of the non-dimensional impact force and the non-dimensional mass. These formulas will be useful in the design of the spherical measuring device for air-drop deployment.
Author Contributions
Funding
Conflicts of Interest
References
- Von Karman, T. The Impact on Seaplane Floats during Landing. Tech. Rep. Arch. Image Librar. 1929. Available online: https://digital.library.unt.edu/ark:/67531/metadc54062/ (accessed on 15 March 2019).
- Wagner, H. Uber Stoss-und Gleitvorgange an der Oberflache von Flussigkeiten. ZAMM 1932, 12, 193–215. [Google Scholar] [CrossRef]
- Korobkin, A. Analytical models of water impact. Eur. J. Appl. Math. 2004, 15, 821–838. [Google Scholar] [CrossRef]
- Tassin, A.; Jacques, N.; Alaoui, A.; Nême, A.; Leblé, B. Assessment and comparison of several analytical models of water impact. Int. J. Multiphys. 2010, 4, 125–140. [Google Scholar] [CrossRef]
- Stenius, I.; Rosén, A.; Kuttenkeuler, J. Explicit FE-modelling of fluid–structure interaction in hull–water impacts. Int. Shipbuild. Prog. 2006, 53, 103–121. [Google Scholar]
- Stenius, I.; Rosén, A.; Kuttenkeuler, J. Explicit FE-modelling of hydroelasticity in panel-water impacts. Int. Shipbuild. Prog. 2007, 54, 111–127. [Google Scholar]
- Wang, S.; Soares, C.G. Slam induced loads on bow-flared sections with various roll angles. Ocean. Eng. 2013, 67, 45–57. [Google Scholar] [CrossRef]
- Yu, P.; Li, H.; Ong, M.C. Numerical study on the water entry of curved wedges. Ships Offshore Struct. 2018, 13, 885–898. [Google Scholar] [CrossRef]
- Wang, S.; Soares, C.G. Numerical study on the water impact of 3D bodies by an explicit finite element method. Ocean. Eng. 2014, 78, 73–88. [Google Scholar] [CrossRef]
- Bilandi, R.N.; Jamei, S.; Roshan, F.; Azizi, M. Numerical simulation of vertical water impact of asymmetric wedges by using a finite volume method combined with a volume-of-fluid technique. Ocean. Eng. 2018, 160, 119–131. [Google Scholar] [CrossRef]
- Cheng, Y.; Ji, C.; Zhai, G. Numerical investigation of water entry of a wedge into waves with current effects using a fully nonlinear HOBEM. Ocean. Eng. 2018, 153, 33–52. [Google Scholar] [CrossRef]
- Mirzaii, I.; Passandideh-Fard, M. Modeling free surface flows in presence of an arbitrary moving object. Int. J. Multiphas. Flow. 2012, 39, 216–226. [Google Scholar] [CrossRef]
- Iranmanesh, A.; Passandideh-Fard, M. A three-dimensional numerical approach on water entry of a horizontal circular cylinder using the volume of fluid technique. Ocean. Eng. 2017, 130, 557–566. [Google Scholar] [CrossRef]
- Ahmadzadeh, M.; Saranjam, B.; Fard, A.H.; Binesh, A.R. Numerical simulation of sphere water entry problem using Eulerian–Lagrangian method. Appl. Math. Model. 2014, 38, 1673–1684. [Google Scholar] [CrossRef]
- Abraham, J.; Gorman, J.; Reseghetti, F.; Sparrow, E.; Stark, J.; Shepard, T. Modeling and numerical simulation of the forces acting on a sphere during early-water entry. Ocean. Eng. 2014, 76, 1–9. [Google Scholar] [CrossRef]
- Xiao, H.; Zhang, X. Numerical investigation of the fall rate of a sea-monitoring probe. Ocean. Eng. 2012, 56, 20–27. [Google Scholar] [CrossRef]
- Akers, B.; Belmonte, A. Impact dynamics of a solid sphere falling into a viscoelastic micellar fluid. J. Non-Newton. Fluid Mech. 2006, 135, 97–108. [Google Scholar] [CrossRef]
- Do-Quang, M.; Amberg, G. Numerical simulation of the coupling problems of a solid sphere impacting on a liquid free surface. Math. Comput. Simul. 2010, 80, 1664–1673. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Nisewanger, C. Experimental Determination of Pressure Distribution on a Sphere During Water Entry; Naval Ordnance Test Station: China Lake, CA, USA, 1961. [Google Scholar]
- Baldwin, L.; Steves, H.X. Vertical Water Entry of Spheres; White Oax Laboratory: Silver Spring, MD, USA, 1975; p. 76. [Google Scholar]



















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, P.; Shen, C.; Zhen, C.; Tang, H.; Wang, T. Parametric Study on the Free-Fall Water Entry of a Sphere by Using the RANS Method. J. Mar. Sci. Eng. 2019, 7, 122. https://doi.org/10.3390/jmse7050122
Yu P, Shen C, Zhen C, Tang H, Wang T. Parametric Study on the Free-Fall Water Entry of a Sphere by Using the RANS Method. Journal of Marine Science and Engineering. 2019; 7(5):122. https://doi.org/10.3390/jmse7050122
Chicago/Turabian StyleYu, Pengyao, Cong Shen, Chunbo Zhen, Haoyun Tang, and Tianlin Wang. 2019. "Parametric Study on the Free-Fall Water Entry of a Sphere by Using the RANS Method" Journal of Marine Science and Engineering 7, no. 5: 122. https://doi.org/10.3390/jmse7050122
APA StyleYu, P., Shen, C., Zhen, C., Tang, H., & Wang, T. (2019). Parametric Study on the Free-Fall Water Entry of a Sphere by Using the RANS Method. Journal of Marine Science and Engineering, 7(5), 122. https://doi.org/10.3390/jmse7050122