KNSwing—On the Mooring Loads of a Ship-Like Wave Energy Converter



Abstract
1. Introduction
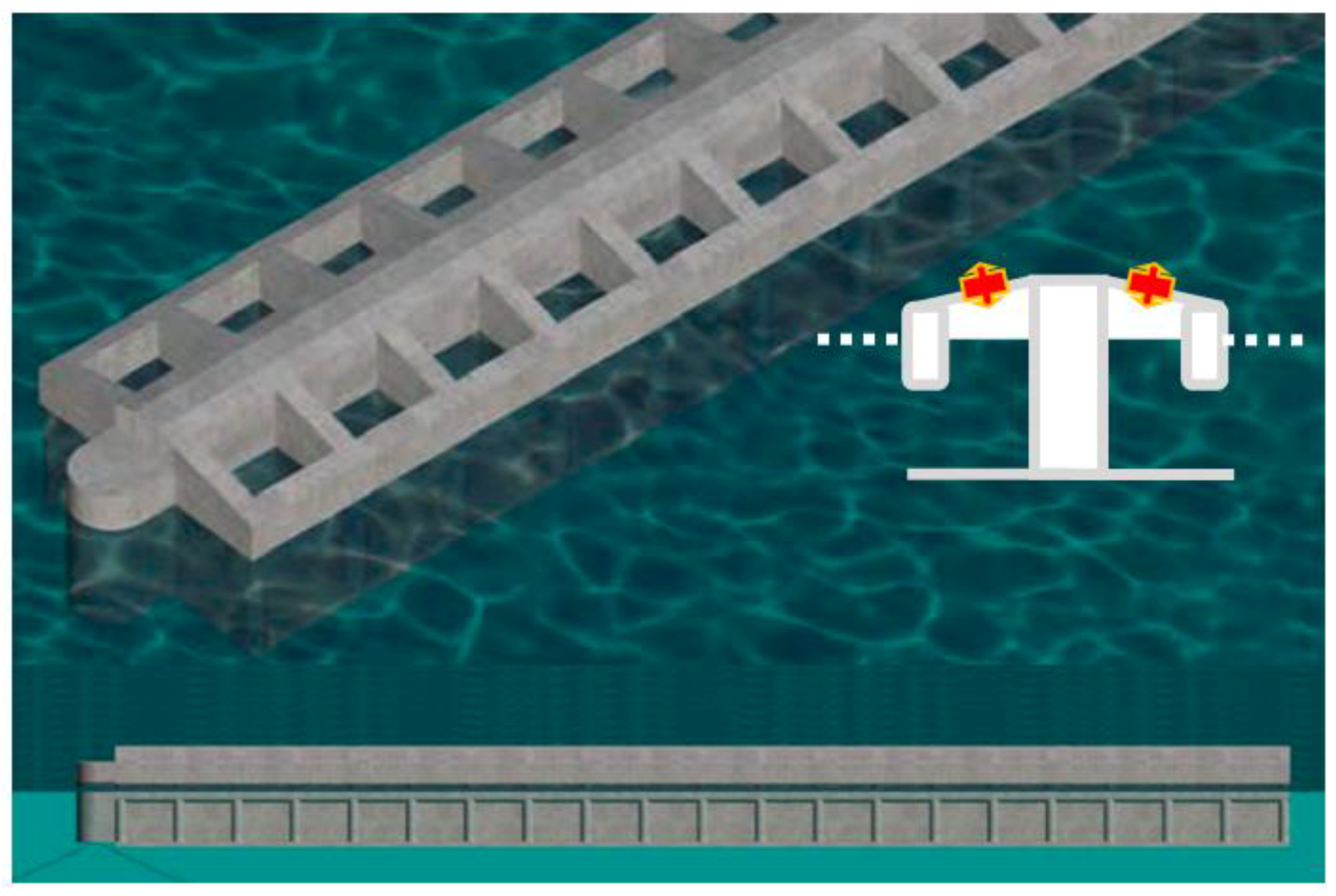
2. Preliminary Design of the KNSWING
3. The Experimental Model KNSwing
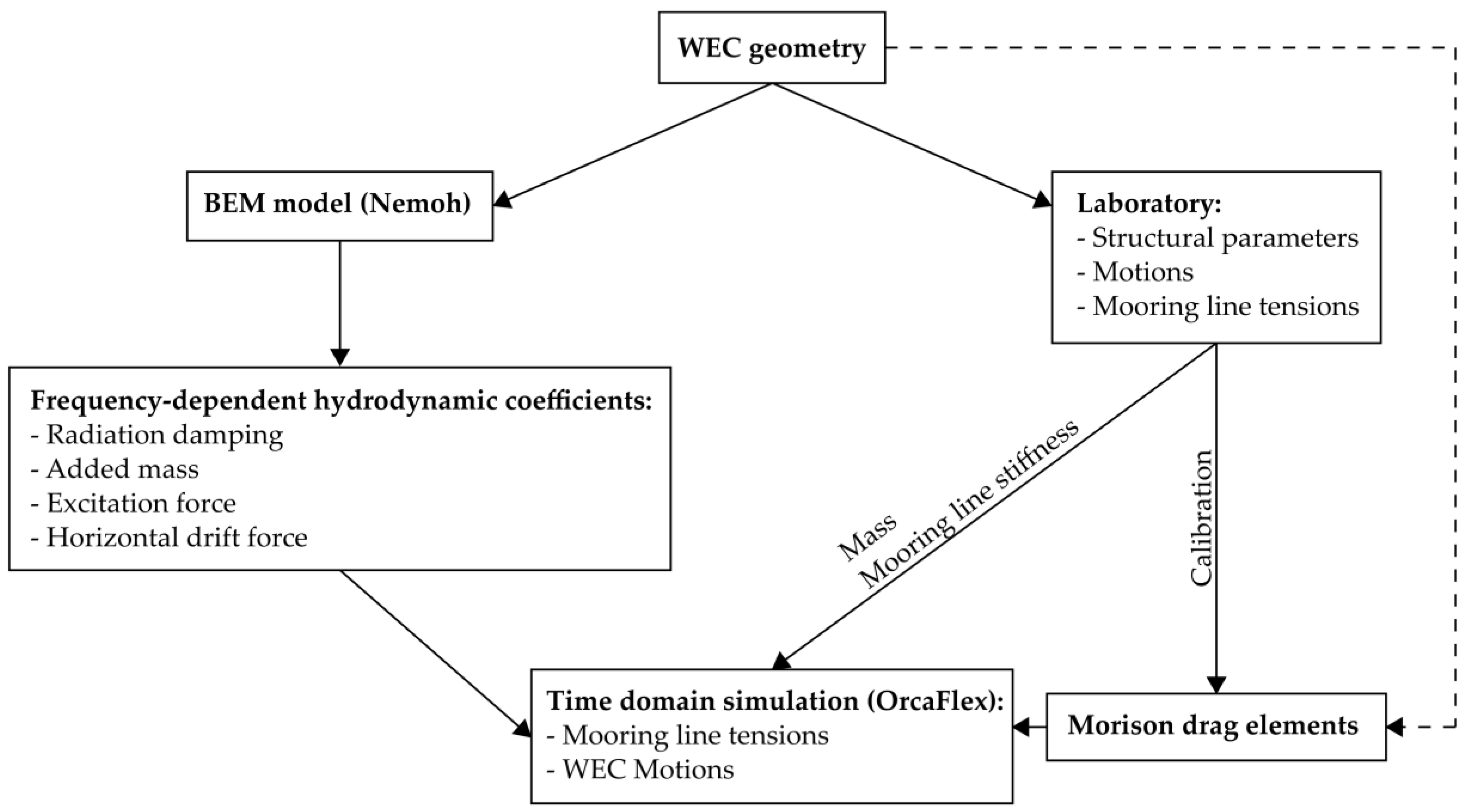
4. The Numerical Model of the Structure and Mooring Solution
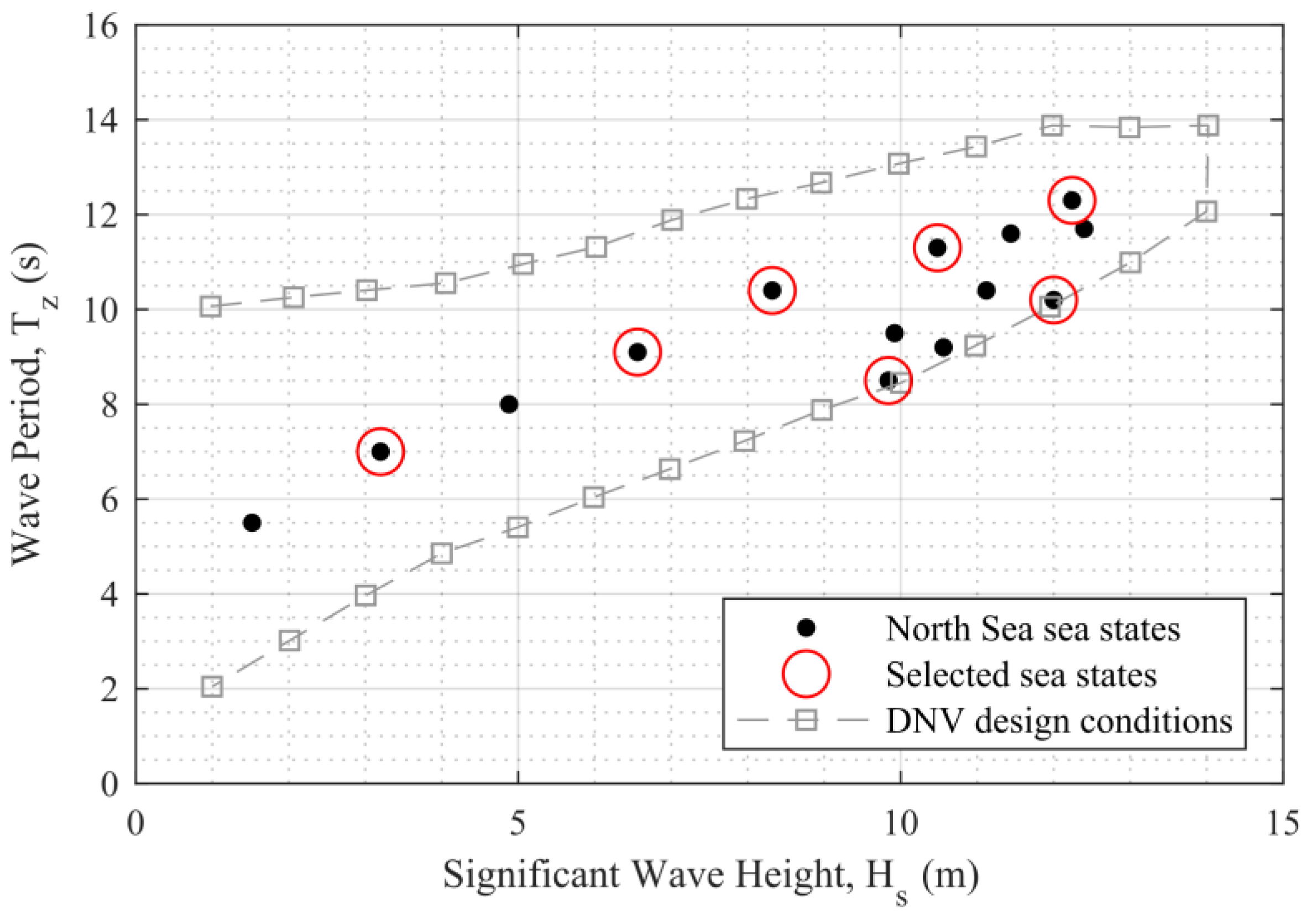
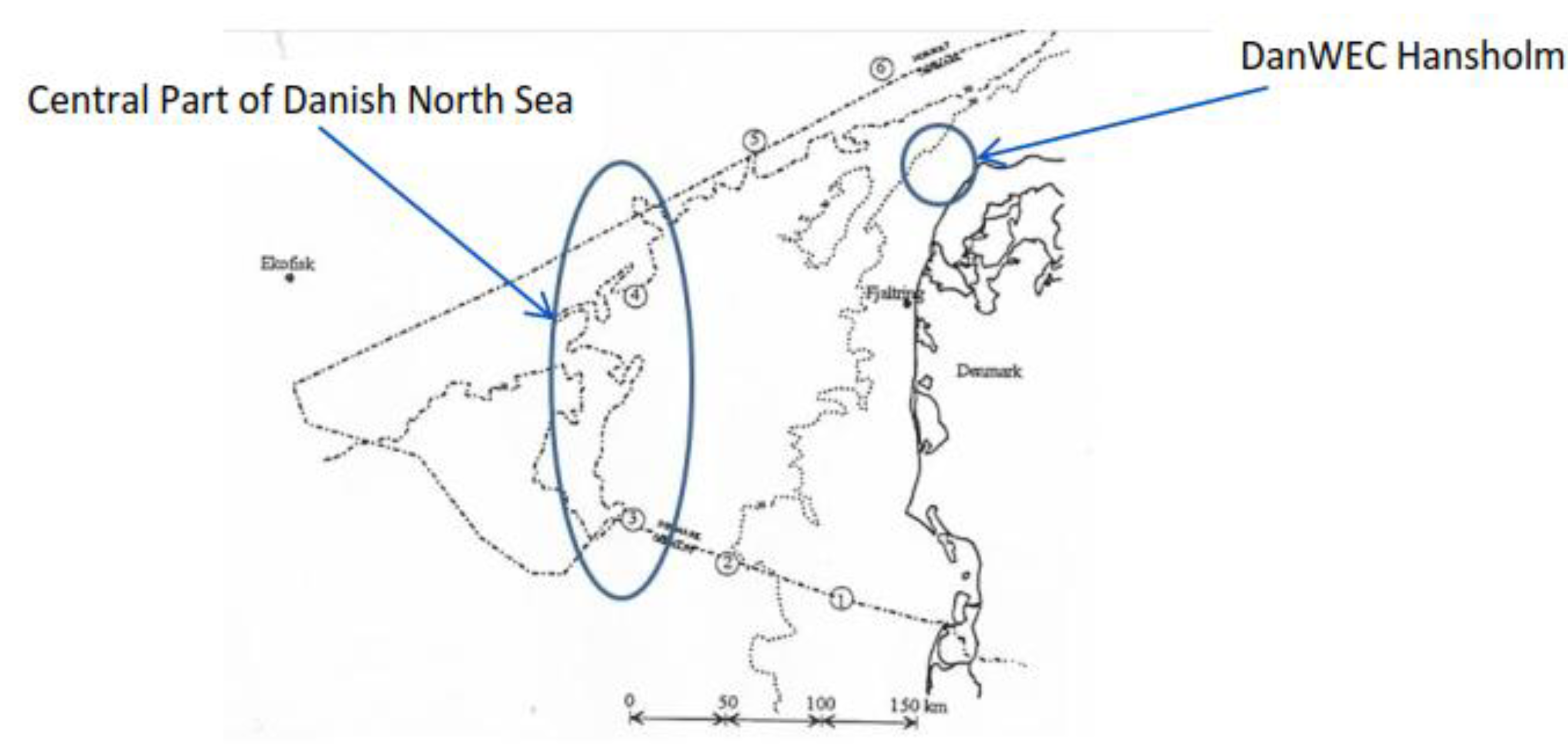
5. The Wave Conditions in the North Sea
6. The Experimental Setup in the Basin
6.1. The Experimental Procedure
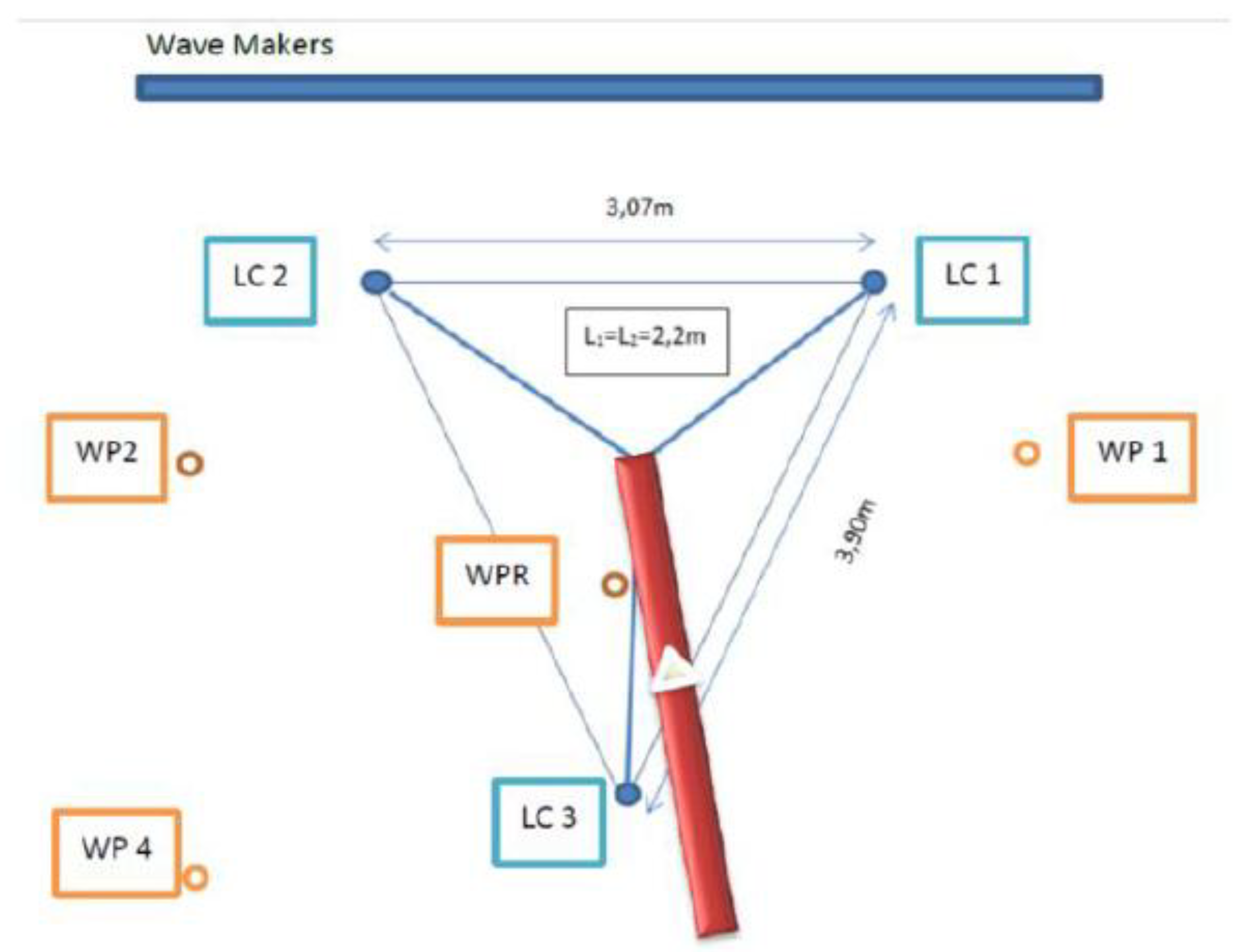
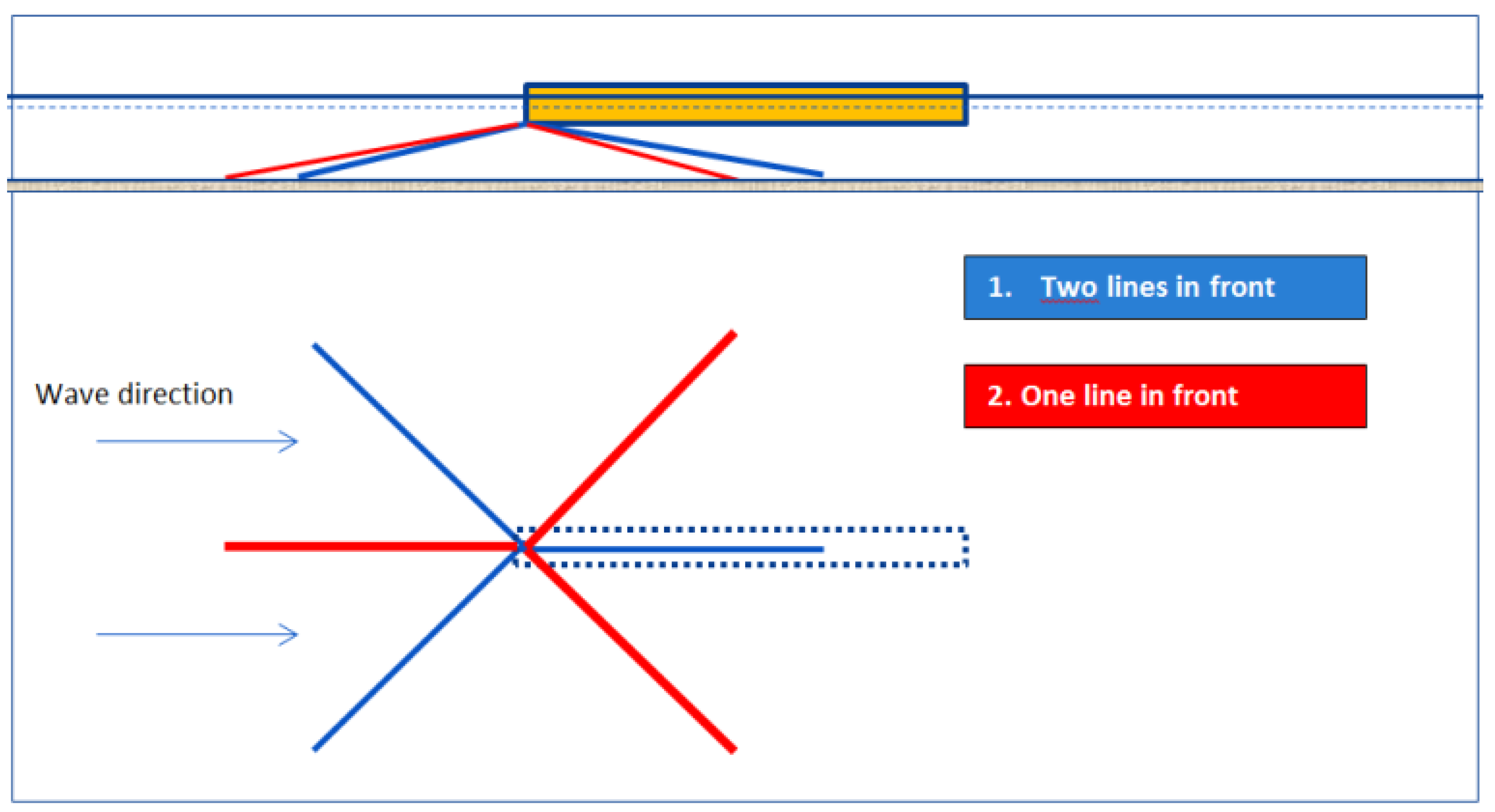
6.2. Modeling the Mooring System
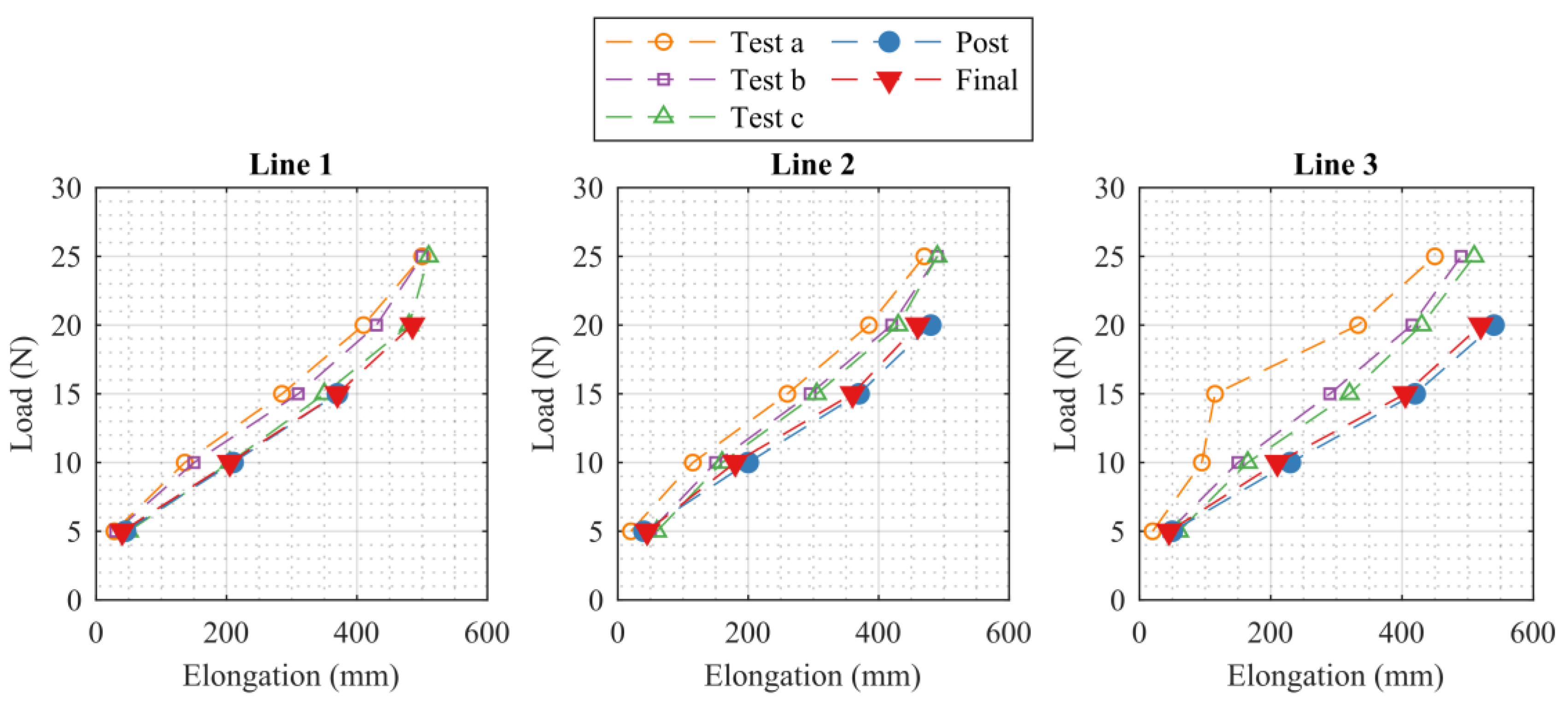
6.3. Calibration of the Mooring Lines
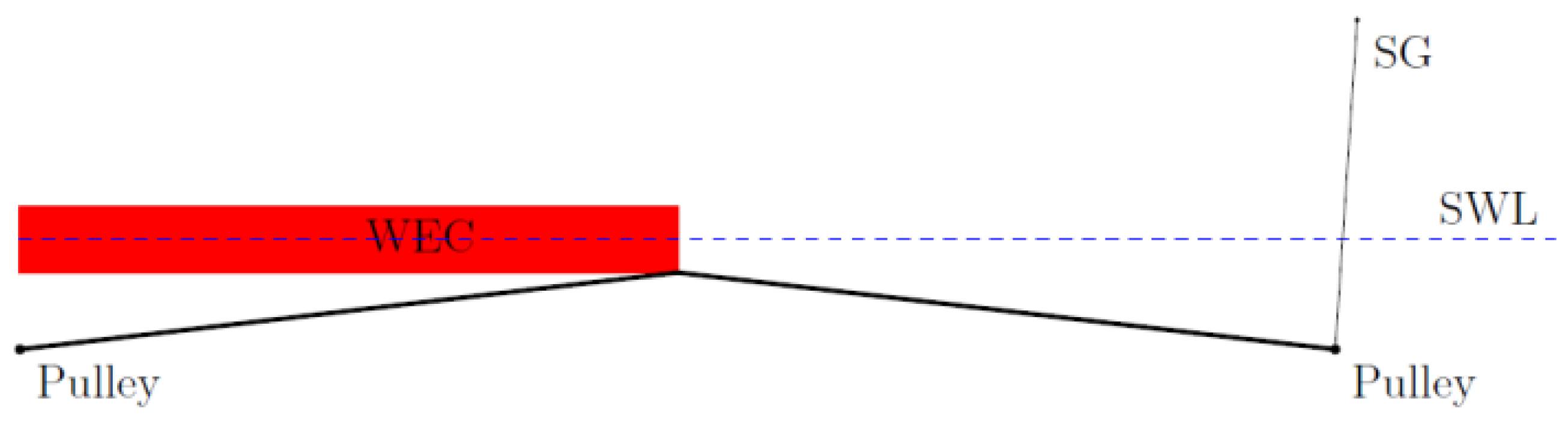
6.4. Experimental Setup for Measurement of the Mooring Loads
6.5. Motion and Load Tracking
7. Results Comparing Experiments to Numerical Simulations
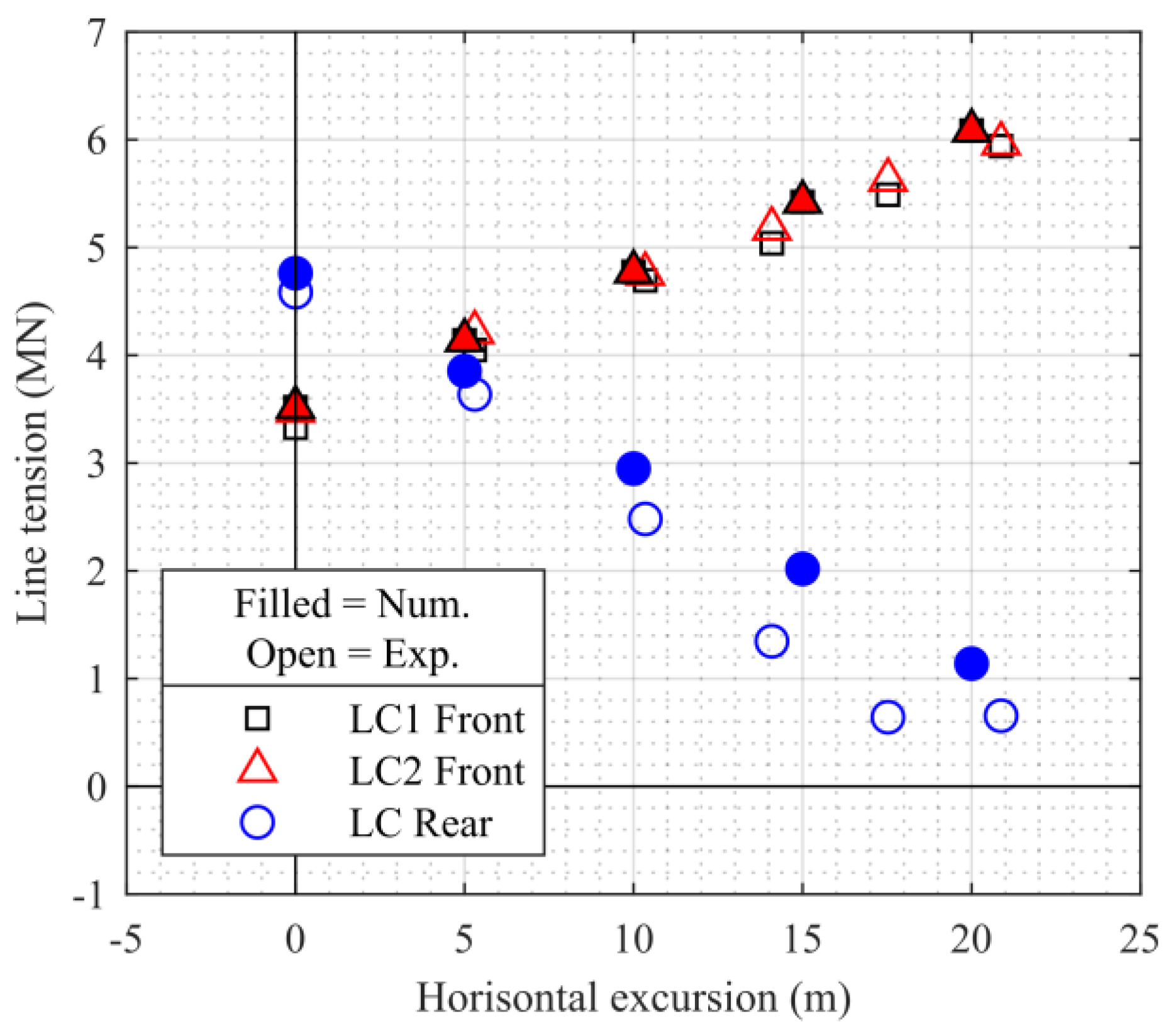
7.1. Static Mooring Stiffness Test
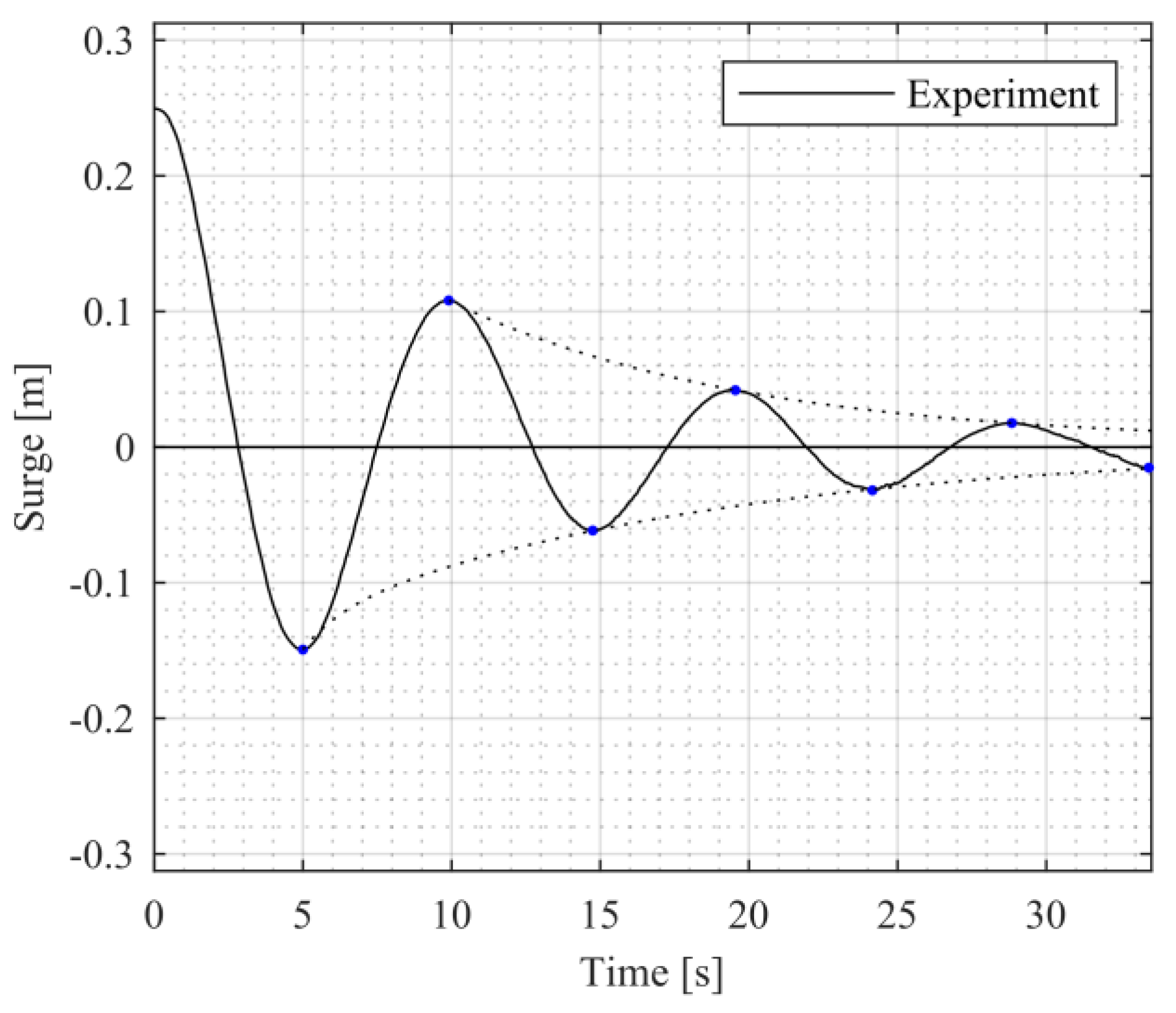
7.2. Free Surge Decay Test
7.3. Dynamic Mooring Load Tests for the Turret Mooring
7.4. The Experimental Setup and Test Series
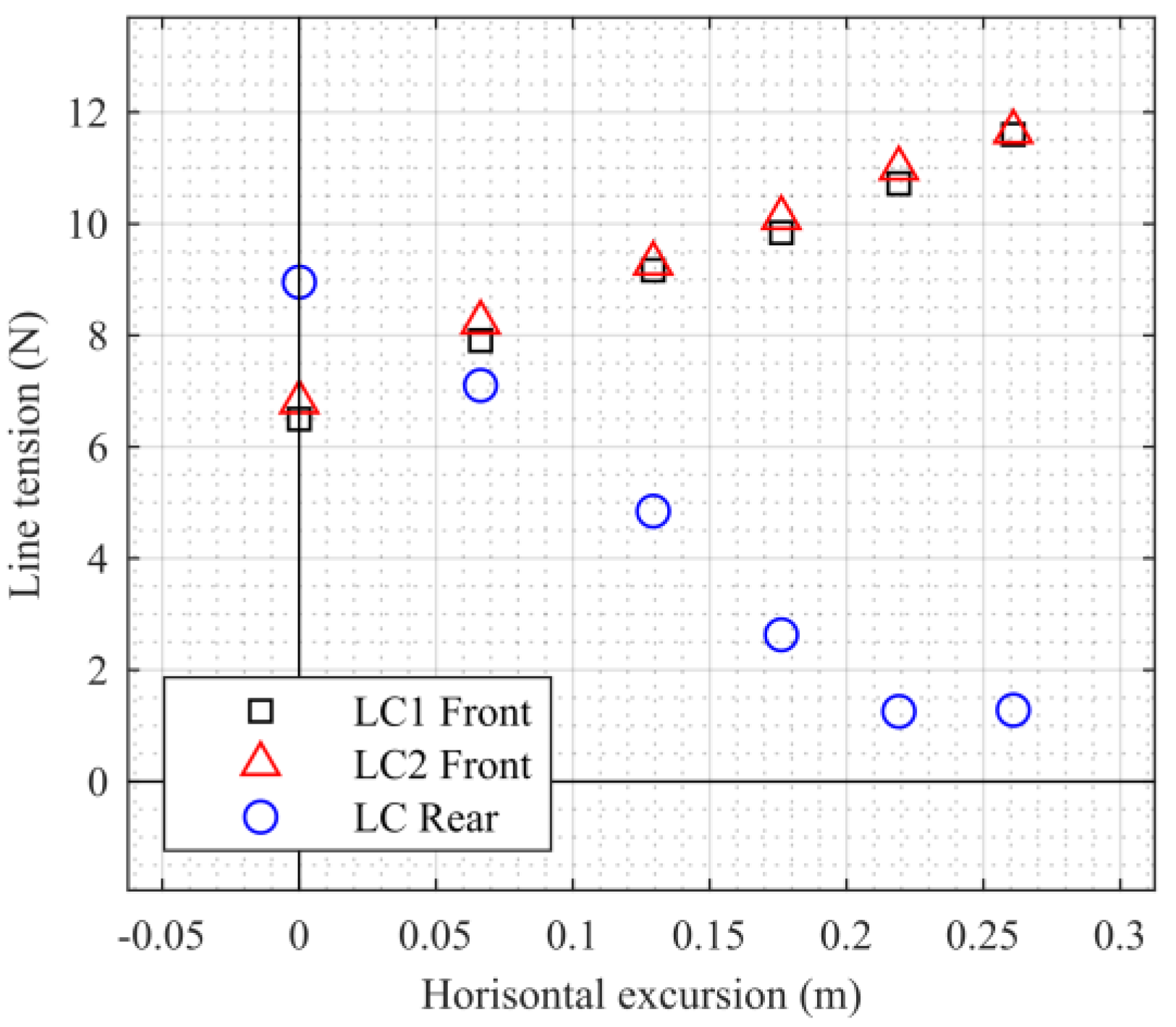
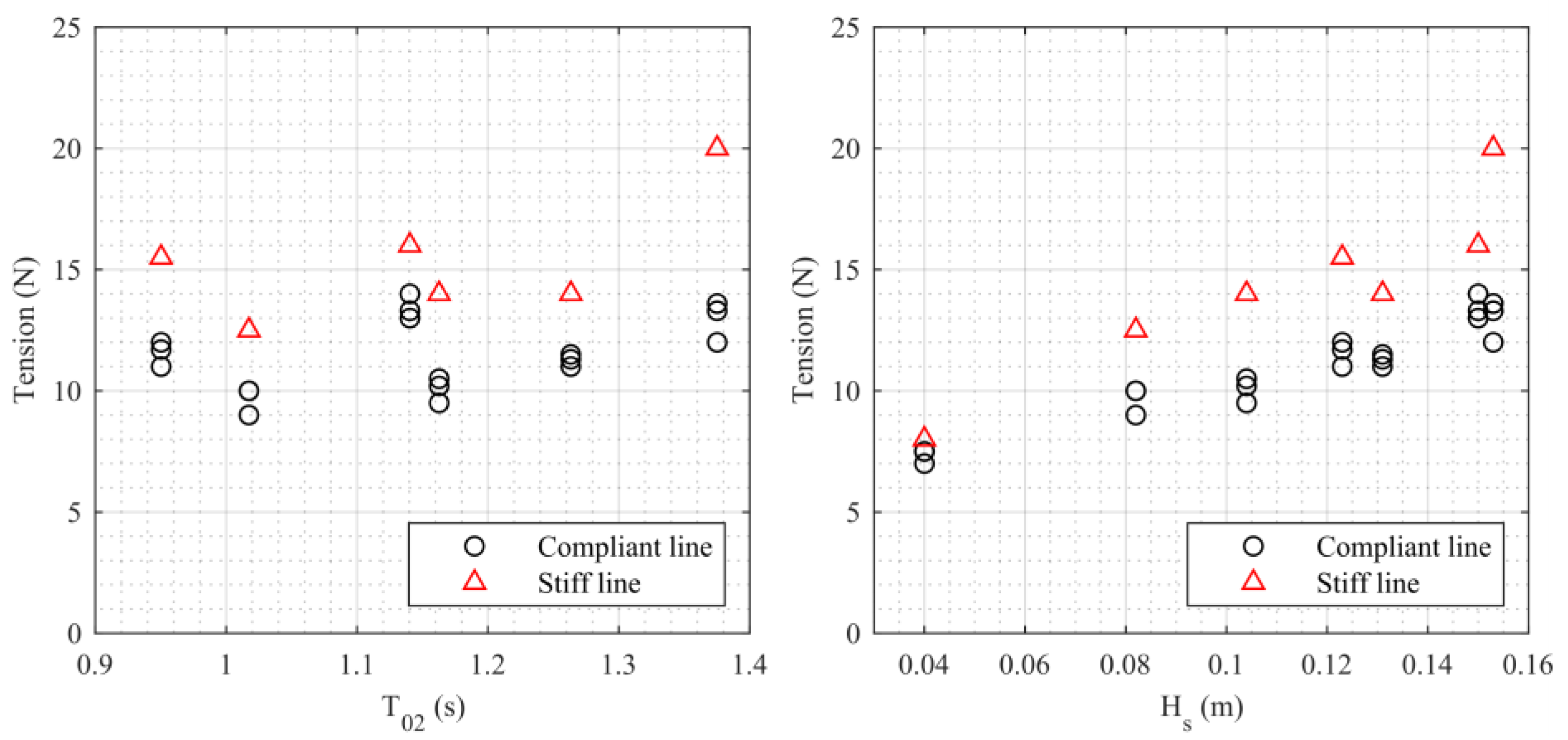
7.5. The Measured Mooring Loads
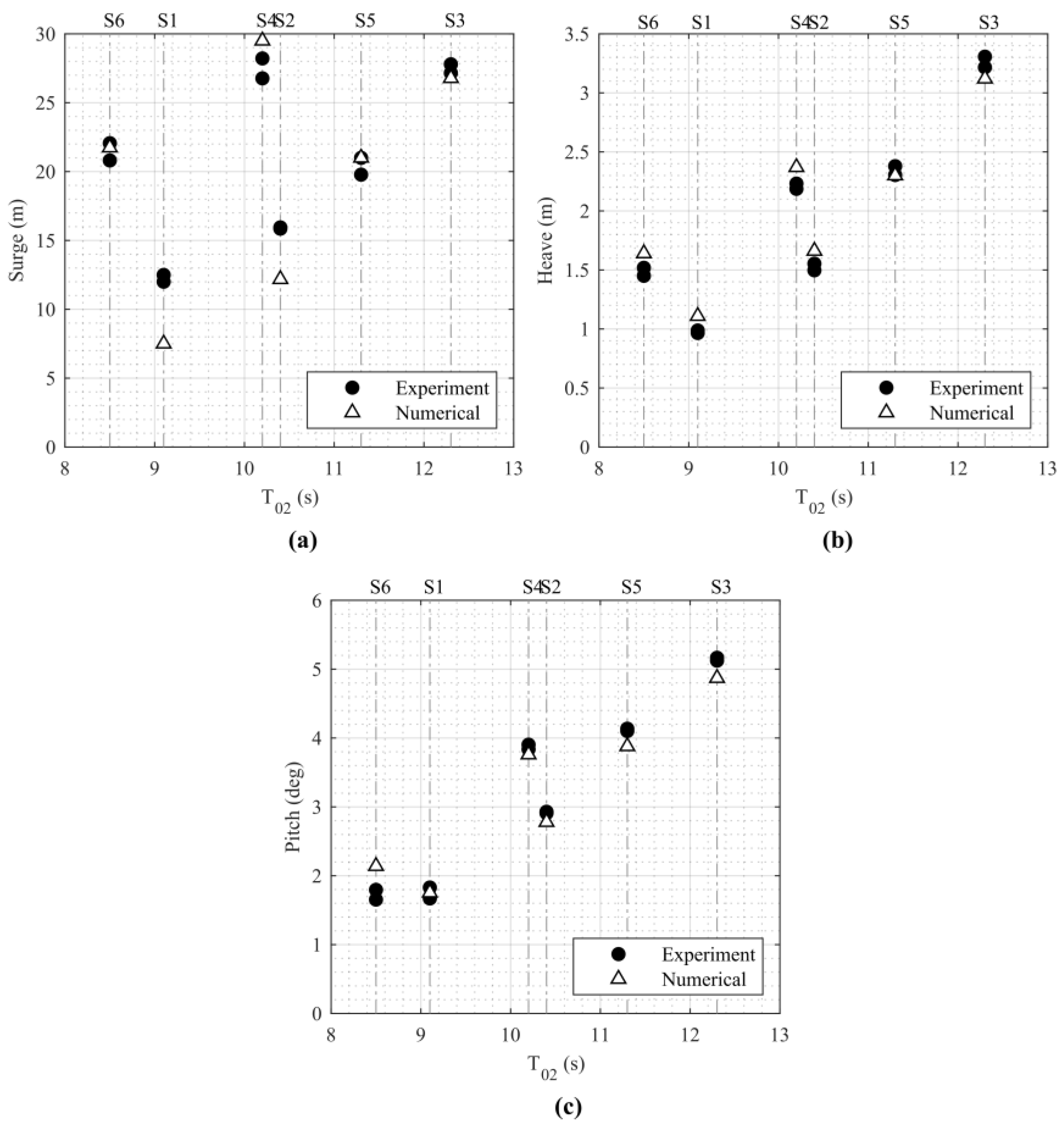
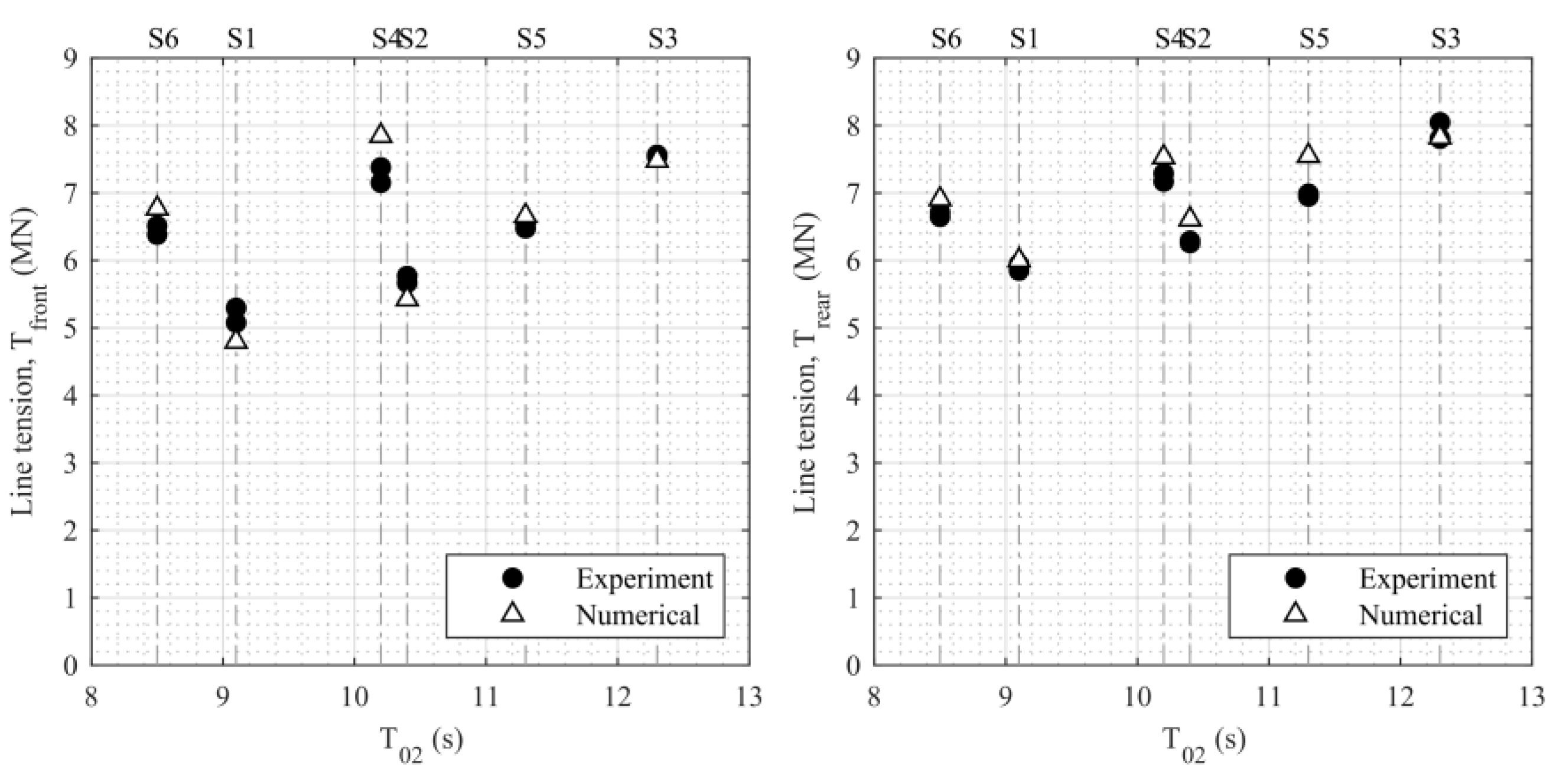
7.6. The Calculated Mooring Loads Compared to Selected Experiments
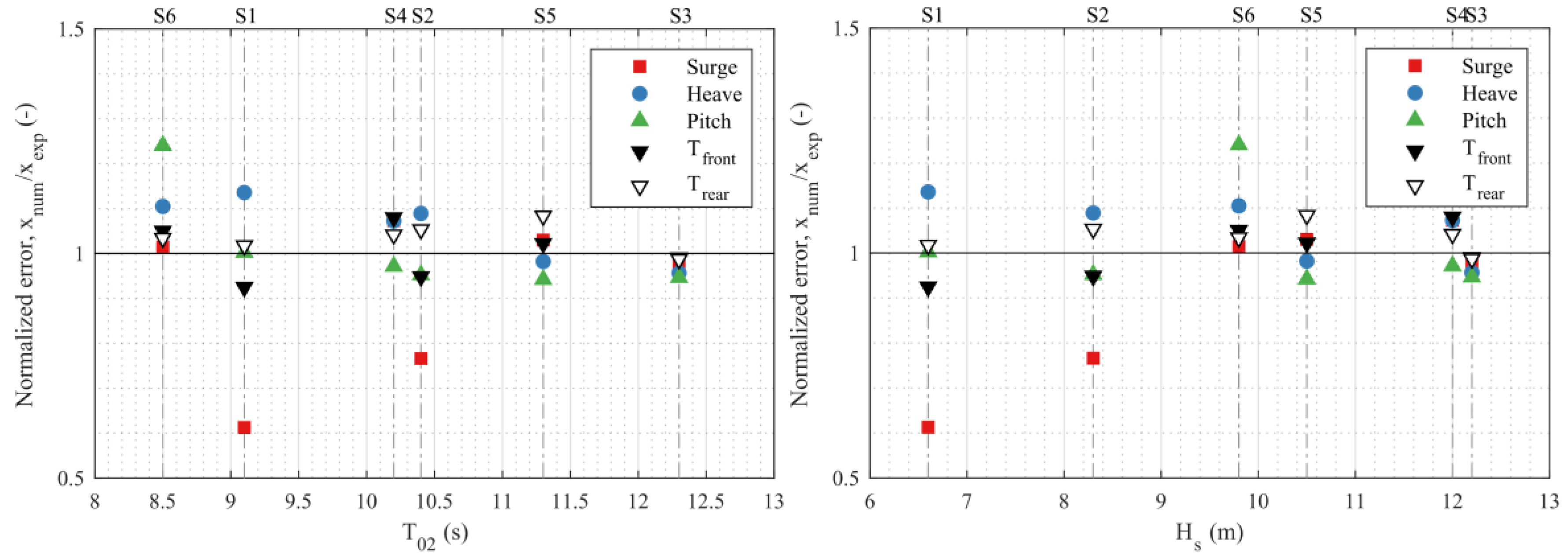
8. Discussion of the Accuracy of Results
9. Conclusions and Up-Scaling of the Result
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Barstow, S.; Mørk, G.; Mollison, D.; Cruz, J. The wave energy resource. In Ocean Wave Energy, Status and Future Perspectives; Cruz, J., Ed.; Springer: Berlin, Germany, 2008. [Google Scholar]
- Pelamis Wave Power. Available online: http://www.pelamiswave.com/ (accessed on 1 January 2014).
- Wavestar Energy. Available online: http://wavestarenergy.com/ (accessed on 1 January 2014).
- Moody, G.W. The NEL oscillating water column: Recent developments. In Proceedings of the First Symposium on Wave Energy Utilization, Gothenburg, Sweden, 30 October–1 November 1979; Chalmers University of Technology: Gothenburg, Sweden, 1980; pp. 283–296. [Google Scholar]
- Masuda, Y. Experimental full scale result ofwave power machine Kaimei in 1978. In Proceedings of the 1st International Symposium on Wave Energy Utilization, Gothenburg, Sweden, 30 October–1 November 1979. [Google Scholar]
- Ishii, S.; Miyazaki, T.; Masuda, Y.; Kai, G. Reports and future plans for the kaimei project. In Proceedings of the 2nd International Symposium on Wave Energy Utilization, Trondheim, Norway, 22–24 June 1982. [Google Scholar]
- Nielsen, K. Final Report: KNSWING Attenuator Development Phase I. Technical Report, FP7-MARINET, Marine Renewables Infrastructure Network. 2013. Available online: http://www.fp7-marinet.eu/ (accessed on 1 January 2014).
- Nielsen, K.; Bingham, H. MARINET experiment KNSWING testing an I-Beam OWC attenuator. Int. J. Mar. Energy 2015, 12, 21–34. [Google Scholar] [CrossRef]
- Bingham, H.; Ducasse, D.; Nielsen, K.; Read, R. Hydrodynamic analysis of oscillating water column wave energy Devices. J. Ocean Eng. Mar. Energy 2015, 1, 405–419. [Google Scholar] [CrossRef]
- Nielsen, K.; Bingham, H.; Thomsen, J. On the Absorption of Wave Power Using Ship Like Structures. In Proceedings of the Twenty-Eighth (2018) International Ocean and Polar Engineering Conference, ISOPE, Sapporo, Japan, 10–15 June 2018. [Google Scholar]
- Thomsen, J.B. On Mooring Solutions for Large Wave Energy Converters. In Proceedings of the 12th European Wave and Tidal Energy Conference, European Wave and Tidal Energy Conference. Technical Committee of the European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Falcão, A.F.; Gato, L.M.; Henriques, J.C.; Borges, J.E.; Pereiras, B.; Castro, F. A novel twin-rotor radial-inflow air turbine for oscillating-water-column wave energy converters. Energy 2015, 93, 2116–2125. [Google Scholar] [CrossRef]
- Thomsen, J.B.; Ferri, F.; Kofoed, J.P.; Black, K. Cost Optimization of Mooring Solutions for Large Floating Wave Energy Converters. Energies 2018, 11, 159. [Google Scholar] [CrossRef]
- Thomsen, J.B.; Ferri, F.; Kofoed, J.P. Validation of a tool for the initial dynamic design of Mooring systems for large floating wave energy converters. J. Mar. Sci. Eng. 2017, 5, 45. [Google Scholar] [CrossRef]
- Babarit, A.; Delhommeau, G. Theoretical and numerical aspects of the open source BEM solver NEMOH. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015. [Google Scholar]
- Orcina Ltd. Orcaflex User Manual; Orcina Ltd.: Cumbria, UK, 2018. [Google Scholar]
- Cummins, W.E. The Impulse Response Function and Ship Motions; No. DTMB-1661; David Taylor Model Basin: Washington, DC, USA, 1962. [Google Scholar]
- Morison, J.R.; Johnson, J.W.; Schaaf, S.A. The force exerted by surface waves on piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- Nielsen, K.; Rugbjerg, M.; Hesselbjerg, J. Kortlægning af bølgeenergiforhold i den danske del af Nordsøen; Project Report; Rambøll: Copenhagen, Denmark, 1999. [Google Scholar]
- Det Norske Veritas. Offshore Standard DNV-OS-E301 Position Mooring; Det Norske Veritas: Høvik, Norway, 2010. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| KNSWING | Model = 3 m | L = 150 m | L = 240 m |
|---|---|---|---|
| Upscaling | 1 | 50 | 80 |
| Length L | 3 m | 150 m | 240 m |
| Beam B | 0.345 m | 17.25 m | 27.60 m |
| Height H | 0.230 m | 11.5 m | 18.4 m |
| Beam of buoyance chamber b | 0.10 m | 5 m | 8 m |
| Draught D | 0.165 m | 8.25 m | 13.2 m |
| Freeboard: | 0.05 m | 2.5 m | 4 m |
| Displacement | 87.4 kg | 11,000 ton | 45,000 ton |
| BMT | 0.063 m | ||
| KB | 0.075 m | ||
| Waterplane area | 0.5 m2 | ||
| Water Plane Inertia roll | 0.0061 m4 | ||
| Water depth Portaferry | 0.55 m | 27.5 m | 44 m |
| Water depth HMRC | 1.0 m | 50 m | 80 m |
| Environmental Parameter | Full-Scale Values | Model Scale Values (1:80) |
|---|---|---|
| Water Depth, h | 45.0 m | 0.55 m |
| Significant Wave Height, Hs | 11.0–12.0 m | 0.14–0.15 m |
| Wave Period, T02 | 11.0–12.0 s | 1.2–1.3 s |
| Rope | Stiffness a | Stiffness b | Stiffness c | Average | Post | Final |
|---|---|---|---|---|---|---|
| N/m | N/m | N/m | N/m | N/m | N/m | |
| 1 | 40.8 | 40.4 | 40.2 | 40.5 | 30.0 | 33.0 |
| 2 | 42.4 | 43.0 | 43.6 | 43.0 | 33.0 | 34.0 |
| 3 | 42.0 | 42.9 | 39.3 | 41.4 | 33.0 | 31.0 |
| Value | Experimental | Numerical |
|---|---|---|
| Surge natural period | 85.6 s | 86.6 s |
| Full Scale | Model Scale 1:80 | |||
|---|---|---|---|---|
| Reference | Hmo [m] | T02 [s] | Hmo [mm] | To2 [s] |
| S1S04 (S1) | 6.6 | 9.1 | 82 | 1.02 |
| S1S05 (S2) | 8.3 | 10.4 | 104 | 1.16 |
| S6S01(S3) | 12.4 | 12.3 | 153 | 1.38 |
| S6S03 (S4) | 12.0 | 10.2 | 150 | 1.14 |
| S6s07 (S5) | 10.5 | 11.3 | 131 | 1.26 |
| S6S09 (S6) | 9.8 | 8.5 | 123 | 0.95 |
| Series | Stiffness [N/m] | Mooring Geometry [mm] | Pretension [N] | ResonancePeriod [s] | |||||
|---|---|---|---|---|---|---|---|---|---|
| M | K | L1 | L2 | L3 | s1 | s2 | s3 | To | |
| Irregular Waves | |||||||||
| 1 | 35 | 212 | 212 | 212 | 5.0 | 5 | 8.0 | 10 | |
| 2 3 5 | 6.9 7.0 6.5 | 6.7 7 6.1 | 8.6 9.0 6.7 | ||||||
| 6 | 130 | 208 | 208 | 215 | 9.4 | 9.6 | 11.2 | 5 | |
| Regular Waves | |||||||||
| 8 | 130 | 8.6 | 8.6 | 10.6 | 5 | ||||
| 9 | 35 | 7.5 | 7.5 | 10.2 | 10 | ||||
| KNSWING | Model | KNSwing 150 | KNSwing 240 |
|---|---|---|---|
| Ave. Absorbed Power @ Hs = 5 m | 2500 kW | 10,000 kW | |
| Length L | 3 m | 150 m | 240 m |
| Beam B | 0.345 m | 19.5 m | 28.80 m |
| Draught D | 0.165 m | 8 m | 12.8 m |
| Displacement | 87.4 kg | 12.000 ton | 45.000 ton |
| Location | Portaferry | DanWEC | North Sea |
| Water depth | 0.54 m | 27 m | 45 m |
| Max Hs | 0.152 m | 7.6 m | 12.2 m |
| Peak Period Tp | 1.77–1.87 s | 12.5–13.2 s | 15.8–16.7 s |
| Mooring Geometry | |||
| Length | 2 m | 100 m | 160 m |
| Stiffness Medium | 33 N/m | 92 kN/m | 236 kN/m |
| Stiffness Stiff | 130 N/m | 328 kN/m | 830 kN/m |
| Mooring Loads Medium | 11.5 N | 1440 kN | 5900 kN |
| Mooring Loads Stiff | 16.8 N | 2100 kN | 8600 kN |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nielsen, K.; Thomsen, J.B. KNSwing—On the Mooring Loads of a Ship-Like Wave Energy Converter. J. Mar. Sci. Eng. 2019, 7, 29. https://doi.org/10.3390/jmse7020029
Nielsen K, Thomsen JB. KNSwing—On the Mooring Loads of a Ship-Like Wave Energy Converter. Journal of Marine Science and Engineering. 2019; 7(2):29. https://doi.org/10.3390/jmse7020029
Chicago/Turabian StyleNielsen, Kim, and Jonas Bjerg Thomsen. 2019. "KNSwing—On the Mooring Loads of a Ship-Like Wave Energy Converter" Journal of Marine Science and Engineering 7, no. 2: 29. https://doi.org/10.3390/jmse7020029
APA StyleNielsen, K., & Thomsen, J. B. (2019). KNSwing—On the Mooring Loads of a Ship-Like Wave Energy Converter. Journal of Marine Science and Engineering, 7(2), 29. https://doi.org/10.3390/jmse7020029