A Sensor Web Prototype for Cabled Seafloor Observatories in the East China Sea

Abstract
1. Introduction
2. Plug-and-Play Sensor Web Architecture
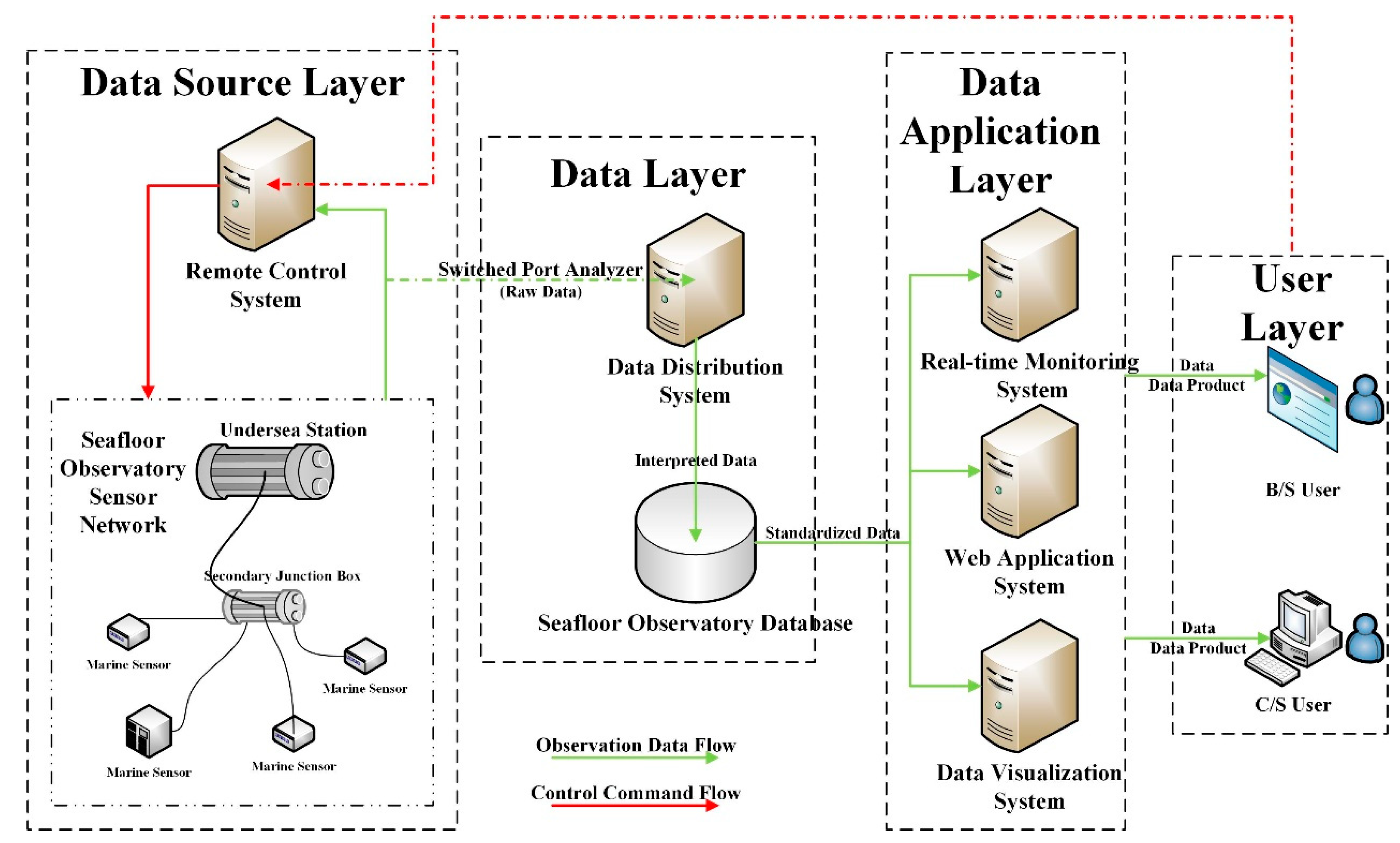
2.1. Layered Architecture
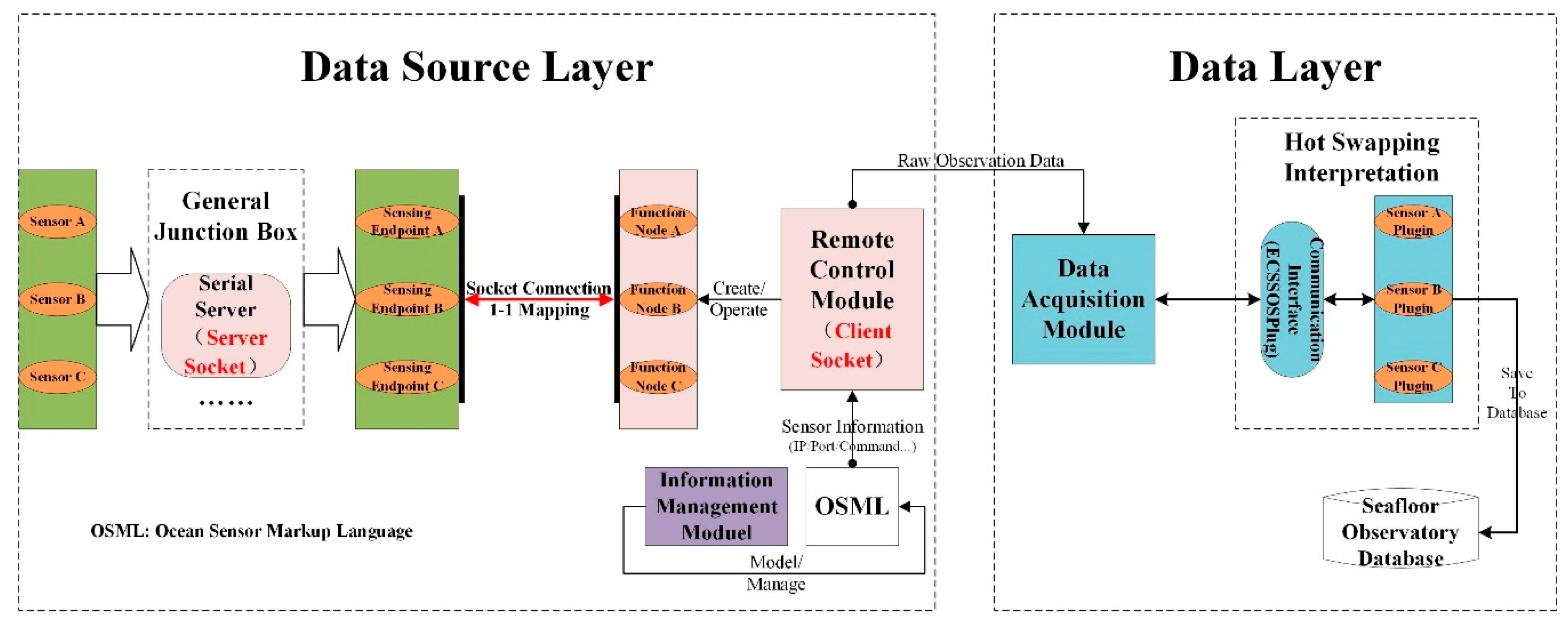
2.1.1. Data Source Layer
2.1.2. Data Layer
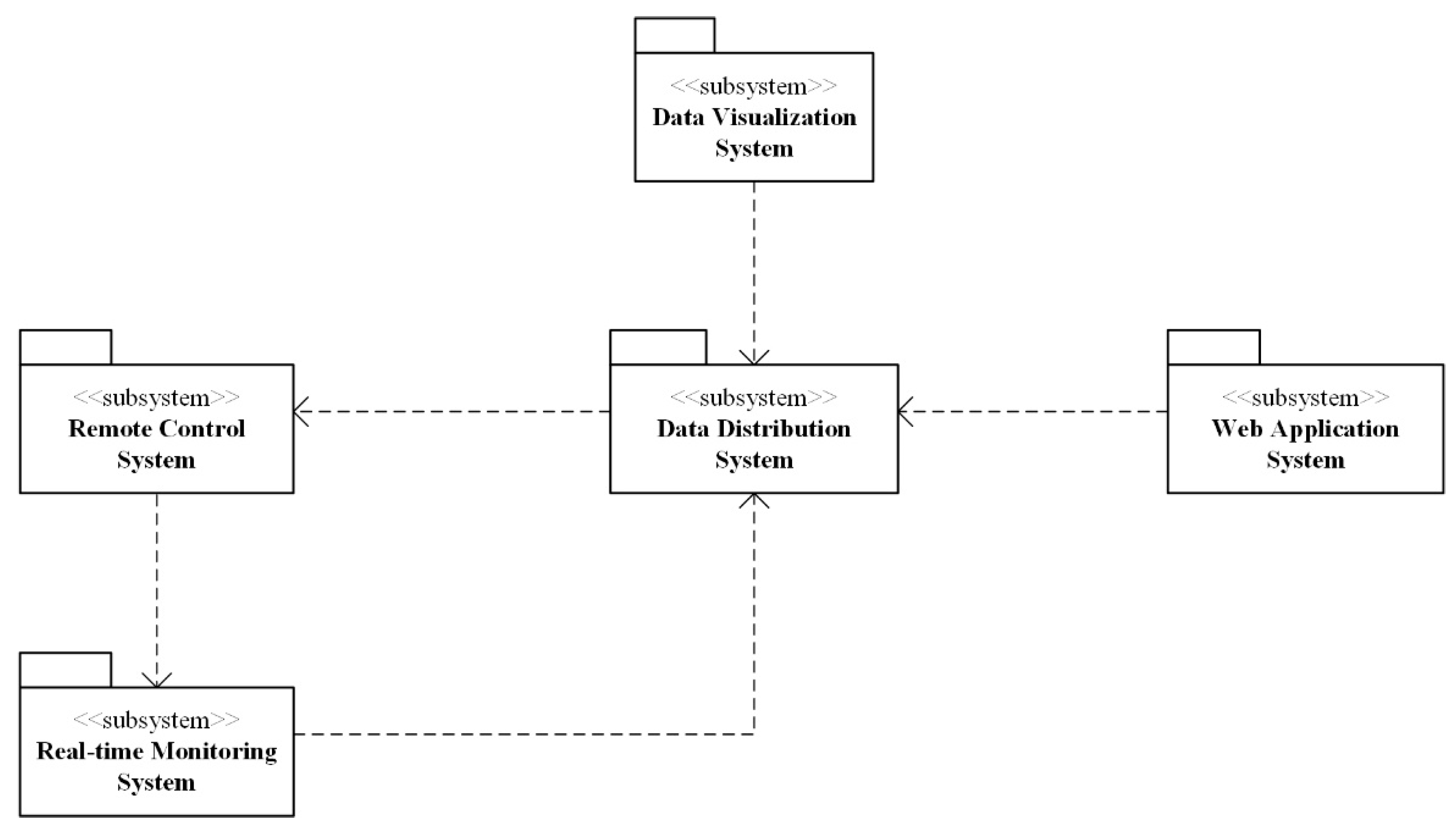
2.1.3. Data Application Layer
2.1.4. User Layer
2.2. Plug-and-Play Mechanism
2.2.1. GOE Control Method at the Data Source Layer
2.2.2. Hot Swapping Interpretation Method at the Data Layer
2.3. Operational Information Flow
3. Prototype System Implementation
3.1. Incremental Releases
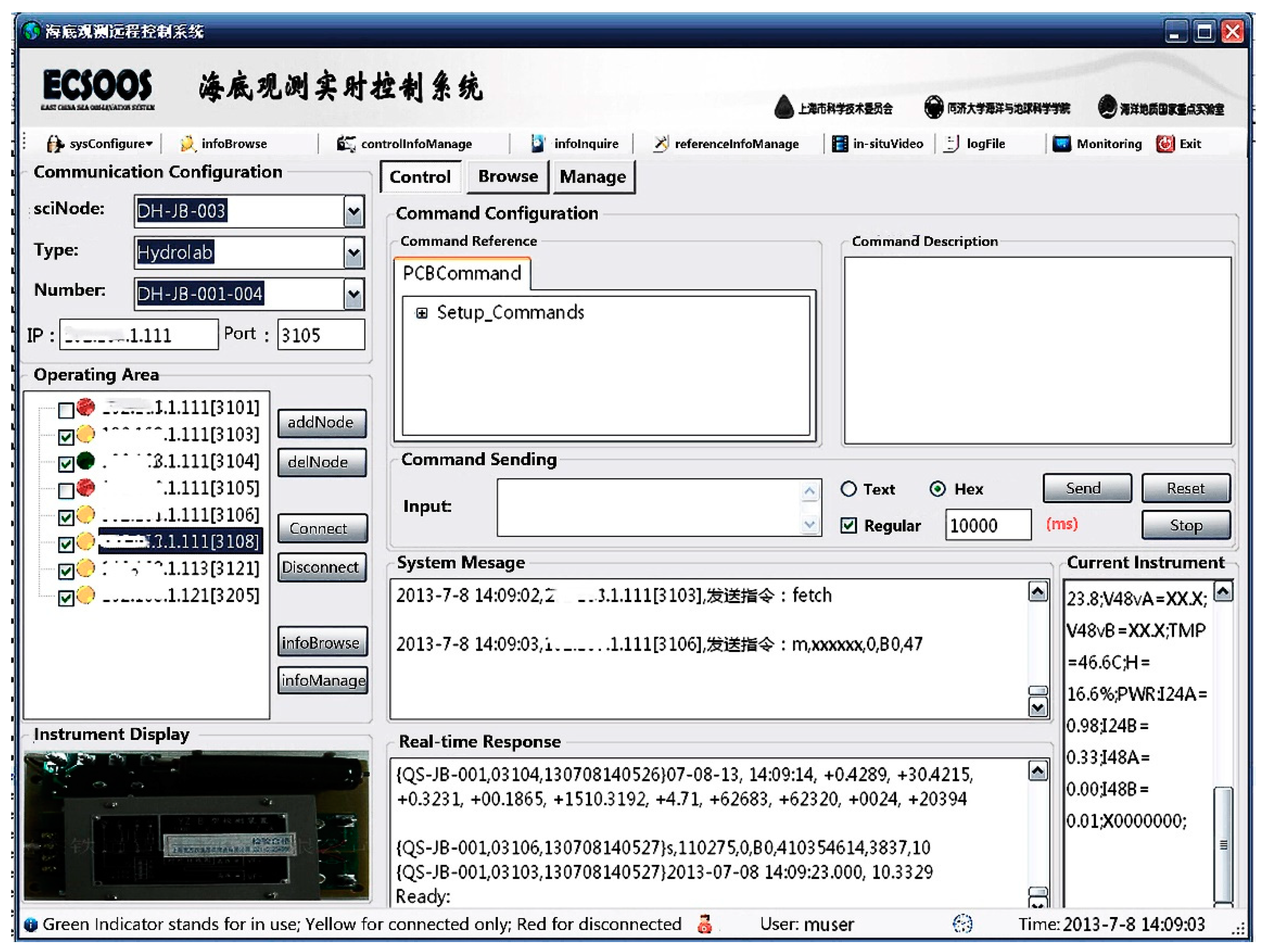
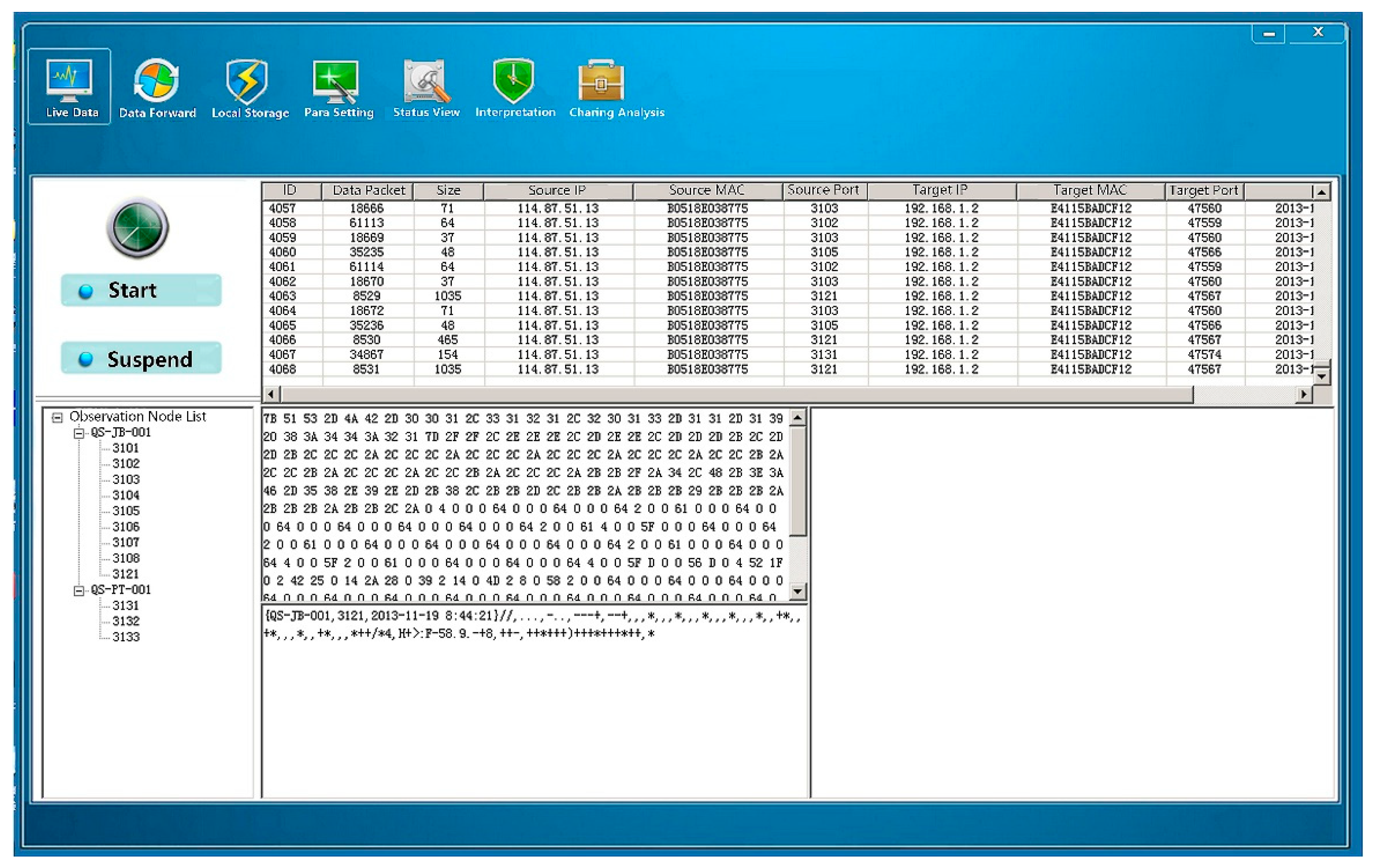
3.2. Remote Control System
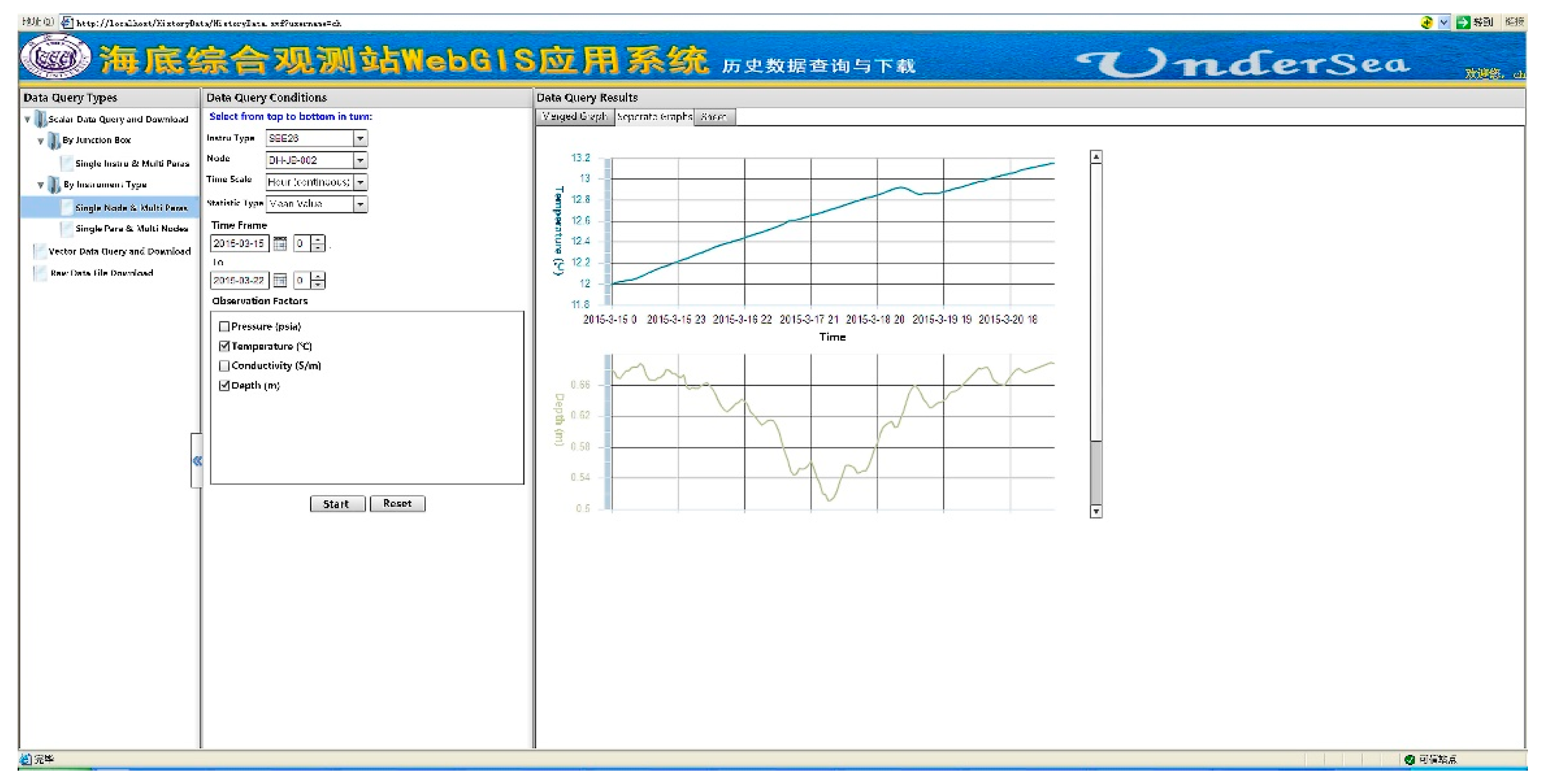
3.3. Data Management System
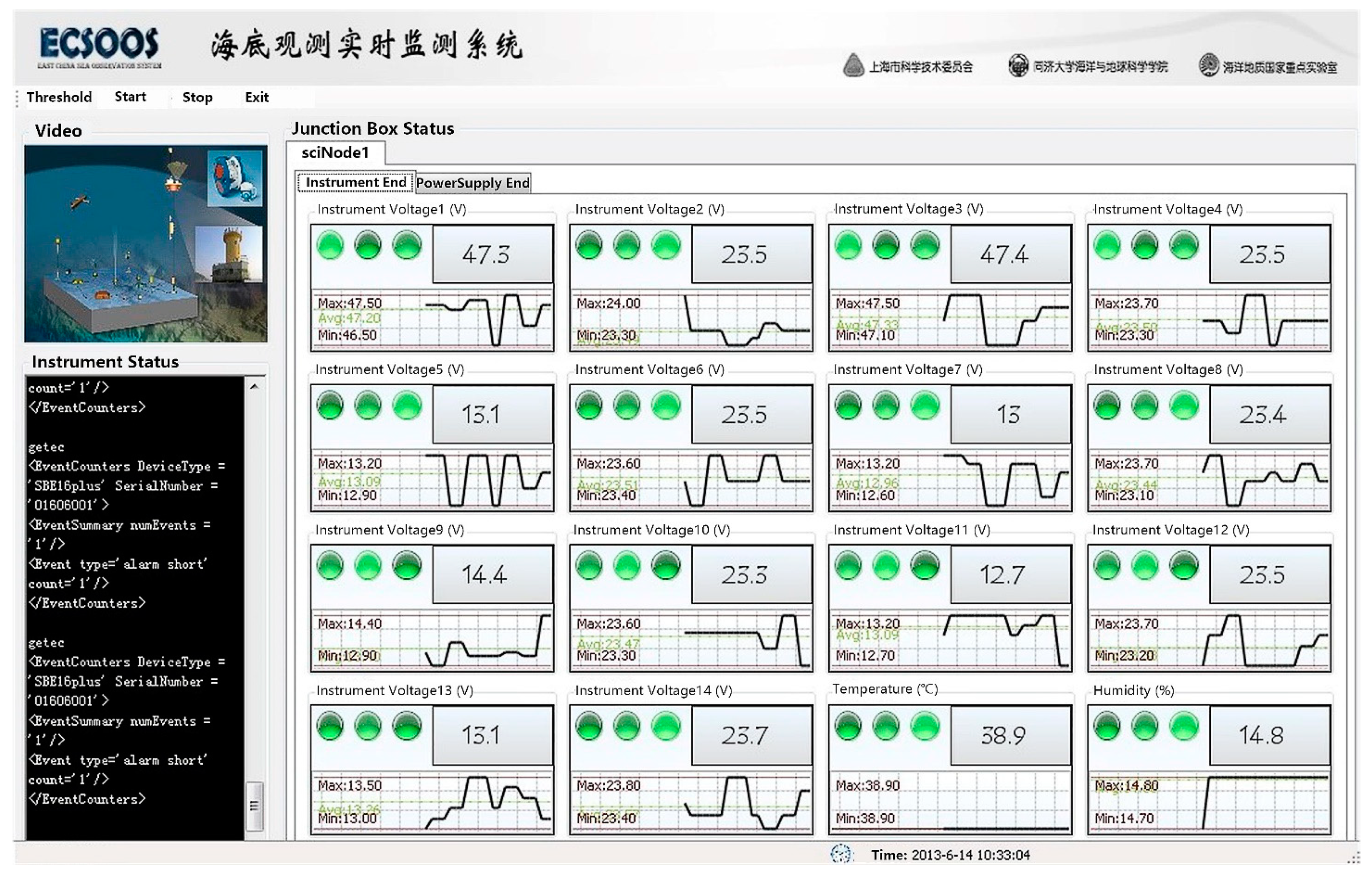
3.4. Real-Time Monitoring System
4. Test and Application
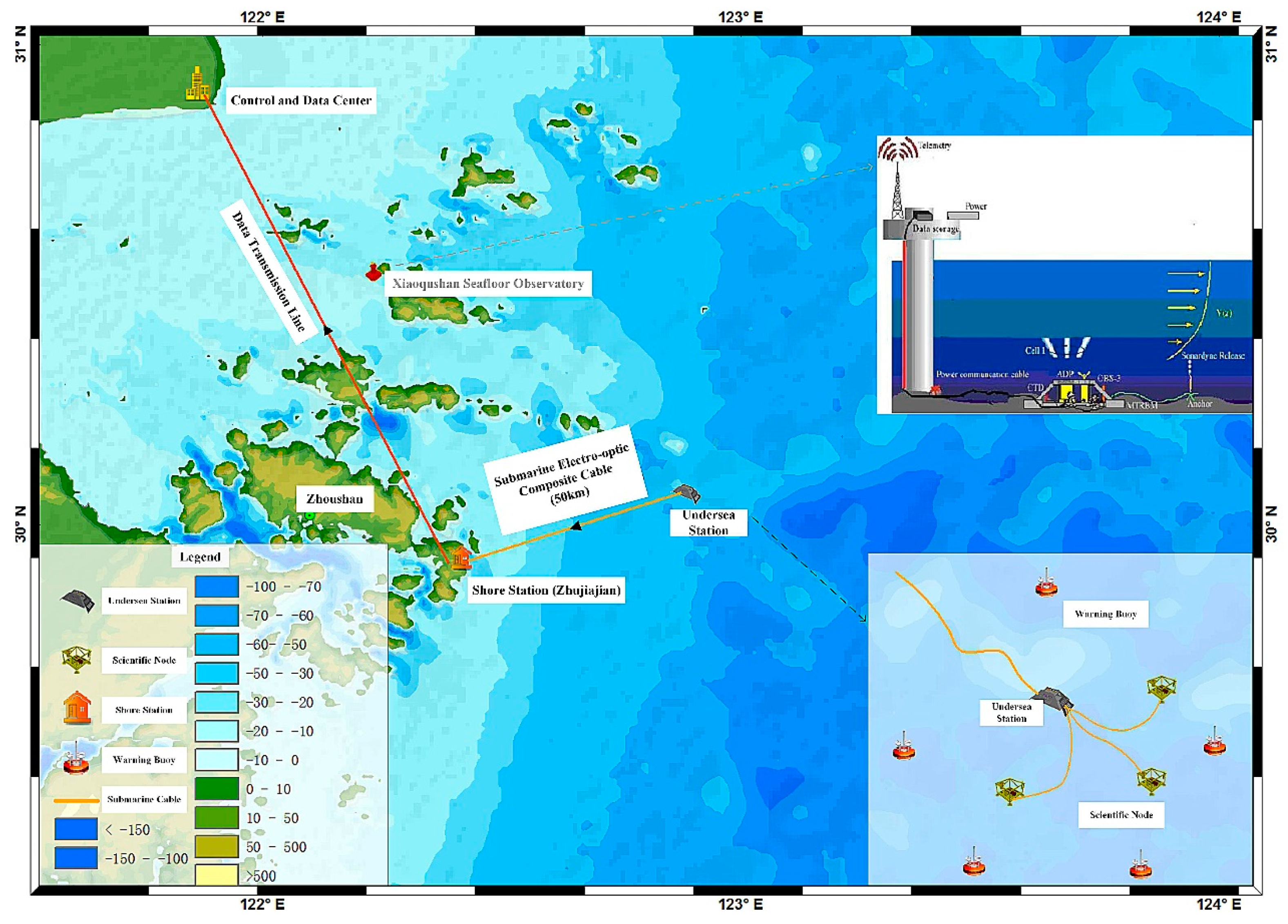
4.1. Experimental Scenario: East China Sea Seafloor Observation System
4.1.1. Xiaoqushan Seafloor Observatory
4.1.2. Zhujiajian Seafloor Observatory
4.2. Prototype System Test: Processes and Results
4.3. Practical Performance
4.3.1. General Descriptions against Specifications
4.3.2. Case Study
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ECSSOS | East China Sea Seafloor Observation System |
| EMSO | European Multidisciplinary Seafloor and water-column Observatory |
| ESOCS | the remote-control system for ECSSOS |
| ESODDS | the data distribution system for ECSSOS |
| ESOSW | the sensor web prototype for ECSSOS |
| GJB | general junction box |
| GOE | GJB-OSML enabled |
| OGC | Open Geospatial Consortium |
| ONC | Ocean Networks Canada |
| OOI | Ocean Observatories Initiative |
| OSML | Ocean Sensor Markup Language |
| SPAN | Switched Port Analyzer |
| SWA | Sensor Web Architecture |
References
- National Research Council. Illuminating the Hidden Planet—The Future of Seafloor Observatory Science, 1st ed.; National Academies Press: Washington, DC, USA, 2000; pp. 1–160. [Google Scholar]
- National Science Foundation. Ocean Sciences at the New Millennium, 1st ed.; Geosciences Professional Services, Inc.: Washington, DC, USA, 2001; pp. 1–152. [Google Scholar]
- Favali, P.; Beranzoli, L. Seafloor Observatory Science: A Review. Ann. Geophys. 2006, 49, 515–567. [Google Scholar]
- Ruhl, H.A.; André, M.; Beranzoli, L.; Çağatay, M.N.; Colaco, A.; Cannat, M.; Dañobeitia, J.J.; Favali, P.; Géli, L.; Gillooly, M.; et al. Societal need for improved understanding of climate change, anthropogenic impacts, and geo-hazard warning drive development of ocean observatories in European Seas. Prog. Oceanorgr. 2011, 91, 1–33. [Google Scholar] [CrossRef]
- Wang, P.X. Seafloor Observatories—The Third Observation Platform for Earth System. Chin. J. Nat. 2007, 29, 125–130. [Google Scholar]
- Wang, P.X. Current Development in Marine Science and Technology: A Retrospect. Adv. Earth Sci. 2011, 26, 644–649. [Google Scholar]
- Glen, S.M.; Dickey, T.D.; Parket, B.; Boicourt, W. Long-term real-time coastal ocean observation networks. Oceanography 2000, 13, 24–34. [Google Scholar] [CrossRef]
- Massion, G.; Raybould, K. MARS: The monterey accelerated research system. Sea Technol. 2006, 47, 39–42. [Google Scholar]
- Cowles, T.; Delaney, J.; Orcutt, J.; Weller, R. The Ocean Observatories Initiative: Sustained Ocean Observing Across a Range of Spatial Scales. Mar. Technol. Soc. J. 2010, 44, 54–64. [Google Scholar] [CrossRef]
- Howe, B.M.; Lucas, R.; Duennebier, F.; Karl, D. ALOHA cabled observatory installation. In Proceedings of the OCEANS Conference, Waikoloa, HI, USA, 19–22 September 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Chave, A.D.; Arrott, M.; Farcas, C.; Farcas, E.; Krueger, I.; Meisinger, M.; Orcutt, J.A.; Vernon, F.L.; Peach, C.; Schofield, O.; et al. Cyberinfrastructure for the US Ocean Observatories Initiative—Enabling Interactive Observation in the Ocean. In Proceedings of the OCEANS Conference, Bremen, Germany, 11–14 May 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Dewey, R.; Round, R.; Macoun, P.; Vervynck, J.; Tunnicliffe, V. The VENUS Cabled Observatory: Engineering Meets Science on the Seafloor. In Proceedings of the OCEANS Conference, Vancouver, BC, Canada, 29 September–4 October 2007; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar]
- Wang, K.L.; Moran, K. NEPTUNE Canada: Science, Operation, and Management. Adv. Earth Sci. 2013, 28, 521–528. [Google Scholar]
- Taylor, S.M. Transformative ocean science through the VENUS and NEPTUNE Canada ocean observing systems. Nucl. Instrum. Meth. A 2009, 602, 63–67. [Google Scholar] [CrossRef]
- Favali, P.; Smriglio, G.; Beranzoli, L.; Braun, T.; Calcara, M.; Colore, D.; Campaci, R.; Coudeville, J.-M.; De Santis, A.; Di Mauro, D.; et al. European seafloor observatory offers new possibilities for deep-sea study. EOS Trans. Am. Geophys. Union 2000, 81, 45–49. [Google Scholar] [CrossRef]
- Monna, S.; Falcone, G.; Beranzoli, L.; Chierici, F.; Cianchini, G.; De Caro, M.; De Santis, A.; Embriaco, D.; Frugoni, F.; Marinaro, G.; et al. Underwater geophysical monitoring for European Multidisciplinary Seafloor and water column Observatories. J. Mar. Syst. 2014, 130, 12–30. [Google Scholar] [CrossRef]
- Favali, P.; Chierici, F.; Marinaro, G.; Giovanetti, G.; Azzarone, A.; Beranzoli, L.; De Santis, A.; Embriaco, D.; Monna, S.; Bue, N.L.; et al. NEMO-SN1 Abyssal Cabled Observatory in the Western Ionian Sea. IEEE J. Ocean. Eng. 2013, 38, 358–374. [Google Scholar] [CrossRef]
- Kasahara, J. Geophysical observations at the ocean bottom. In Proceedings of the 2004 International Symposium on Underwater Technology, Taipei, Taiwan, 20–23 April 2004; IEEE: Piscataway, NJ, USA, 2005. [Google Scholar]
- Shinohara, M.; Kanazawa, T.; Yamada, T.; Machida, Y.; Shinbo, T.; Sakai, S. New Compact Ocean Bottom Cabled Seismometer System Deployed in the Japan Sea. Mar. Geophys. Res. 2013, 35, 231–242. [Google Scholar] [CrossRef]
- Xu, H.P.; Zhang, Y.W.; Xu, C.W.; Li, J.R.; Liu, D.; Qin, R.F.; Luo, S.Q.; Fan, D.D. Coastal Seafloor Observatory at Xiaoqushan in the East China Sea. Chin. Sci. Bull. 2011, 56, 2839–2845. [Google Scholar] [CrossRef]
- Yu, Y.; Xu, H.P.; Xu, C.W.; Qin, R. A study of the remote control for the East China Sea Seafloor Observation System. J. Atmos. Ocean. Technol. 2012, 29, 1149–1158. [Google Scholar] [CrossRef]
- Yu, Y.; Xu, H.P.; Xu, C.W. A Sensor Control Model for Cabled Seafloor Observatories in the East China Sea. Sensors 2018, 18, 3027. [Google Scholar] [CrossRef]
- Delin, K. The Sensor Web: A Macro-Instrument for Coordinated Sensing. Sensors 2001, 2, 270–285. [Google Scholar] [CrossRef]
- Gibbons, P.; Karp, B.; Ke, Y.; Nath, S.; Seshan, S. Irisnet: An Architecture for a Worldwide Sensor Web. IEEE Pervasive Comput. 2003, 2, 22–33. [Google Scholar] [CrossRef]
- Liang, S.; Tao, C. A distributed geospatial infrastructure for the sensor web. Comput. Geosci. 2005, 31, 221–231. [Google Scholar] [CrossRef]
- Zyl, T.L.; Simonis, I.; McFerren, G. The Sensor Web: Systems of sensor systems. Int. J. Digit. Earth 2009, 2, 16–30. [Google Scholar] [CrossRef]
- Bröring, A.; Echterhoff, J.; Jirka, S.; Simonis, I.; Everding, T.; Stasch, C.; Liang, S.; Lemmens, R. New Generation Sensor Web Enablement. Sensors 2011, 11, 2652–2699. [Google Scholar] [CrossRef] [PubMed]
- Barnes, C.R.; Best, M.M.R.; Johnson, F.R.; Pautet, L.; Pirenne, B. Challenges, Benefits, and Opportunities in Installing and Operating Cabled Ocean Observatories Perspectives from NEPTUNE Canada. IEEE J. Ocean. Eng. 2013, 38, 144–157. [Google Scholar] [CrossRef]
- O’Reilly, T.C.; Headley, K.; Edgington, D.R.; Rueda, C.; Lee, K.; Song, E.; Zedlitz, J.; del Rio, J.; Toma, D.; Manuel, A.; et al. Instrument Interface Standards for Interoperable Ocean Sensor Networks. In Proceedings of the OCEANS Conference, Bremen, Germany, 11–14 May 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Talukder, A.; Panangadan, A.V.; Georgas, N.; Herrington, T.; Blumberg, A.F. Integrated Operational Control of Unattended Distributed Coastal Sensor Web Systems With Mobile Autonomous Robots. IEEE J-Stars. 2010, 3, 442–450. [Google Scholar] [CrossRef]
- Gokaraju, B.; Durbha, S.S.; King, R.L.; Younan, N.H. Sensor Web and Data Mining Approaches for Harmful Algal Bloom Detection and Monitoring in the Gulf of Mexico Region. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Durbha, S.S.; King, R.L.; Amanchi, S.K.; Bheemireddy, S.; Younan, N.H. Standards-Based Middleware and Tools for Coastal Sensor Web Applications. IEEE J-Stars. 2010, 3, 451–466. [Google Scholar] [CrossRef]
- Rio, J.; Toma, D.M.; O’Reilly, T.C.; Bröring, A.; Dana, D.R.; Bache, F.; Headley, K.L.; Manuel, L.A.; Edgington, D.R. Standards-Based Plug & Work for Instruments in Ocean Observing Systems. IEEE J. Ocean. Eng. 2014, 39, 430–443. [Google Scholar]
- Smith, L.M.; Barth, J.A.; Kelley, D.S.; Plueddemann, A.; Rodero, I.; Ulses, G.A.; Vardaro, M.; Weller, R. The Ocean Observatories Initiative. Oceanography 2018, 31, 16–35. [Google Scholar] [CrossRef]
- Río Fernandez, J.d.; Toma, D.; Martínez, P.E.; O’Reilly, T.C.; Delory, E.; Pearlman, J.S.; Waldmann, C.; Jirka, S. A Sensor Web Architecture for Integrating Smart Oceanographic Sensors into the Semantic Sensor Web. IEEE J. Ocean. Eng. 2018, 43, 830–842. [Google Scholar]
- Ontrup, J.; Ehnert, N.; Bergmann, M.; Nattkemper, T.W. Biigle—Web 2.0 enabled labelling and exploring of images from the Arctic deep-sea observatory HAUSGARTEN. In Proceedings of the OCEANS Conference, Bremen, Germany, 11–14 May 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Danobeitia, J.; Garcia, O.; Bartolome, R.; Cannat, M.; Cagatay, M.N.; Danobeitia, J.J.; Delory, E.; de Stigter, H.; Ferre, B.; Gillooly, M.; et al. European Multidisciplinary seafloor and water column Observatory for Development; The setup of an interoperable Generic Sensor Module. In Proceedings of the AGU Fall Meeting, San Francisco, CA, USA, 11–16 December 2016. [Google Scholar]
- Best, M.M.R.; Favali, P.; Beranzoli, L.; Cannat, M.; Cagatay, M.N.; Danobeitia, J.J.; Delory, E.; de Stigter, H.; Ferre, B.; Gillooly, M.; et al. European multidisciplinary seafloor and water-column observatory (EMSO): Power and Internet to European waters. In Proceedings of the OCEANS Conference, St. John’s, NL, Canada, 14–19 September 2014; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Partescano, E.; Brosich, A.; Lipizer, M.; Cardin, V.; Giorgetti, A. From heterogeneous marine sensors to sensor web: (near) real-time open data access adopting OGC sensor web enablement standards. Open Geospatial Data Softw. Stand. 2017, 2, 1–9. [Google Scholar] [CrossRef]
- Rio, J.; Delory, E. From ocean sensors to traceable knowledge by harmonizing ocean observing systems. Earthzine: IEEE Committee on Earth Observations, 14 September 2010; 1–11. [Google Scholar]
- Puillat, I.; Person, R.; Leveque, C.; Drogou, J.-F.; Diepenbroek, M.; Garreau, P.; Waldmann, C.; Auffret, Y. Standardization Prospective in ESONET NoE and a Possible Implementation on the ANTARES Site. Nucl. Instrum. Meth. A 2009, 602, 240–245. [Google Scholar] [CrossRef]
- Ohki, T.; Yokobiki, T.; Matsumoto, H.; Nishida, S.; Kodera, T.; Toizumi, M.; Kawaguchi, K. Survey and data management method based on geographic information system for cable based observatory development. In Proceedings of the OCEANS Conference, Kobe, Japan, 6–8 October 2016; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Conover, H.; Berthiau, G.; Botts, M.; Goodman, H.M.; Li, X.; Lu, Y.; Maskey, M.; Regner, K.; Zavodsky, B. Using sensor web protocols for environmental data acquisition and management. Ecol. Inform. 2010, 5, 32–41. [Google Scholar] [CrossRef]
- Li, X.; Zhou, L.F.; Gao, F.X. Application of SOA in the Prototype System for Seafloor Observatory Network. In Proceedings of the ICSS, Shenzhen, China, 11–13 April 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar]
- Jiang, Y.G.; Dou, J.F.; Guo, Z.W.; Hu, K. Research of Marine Sensor Web Based on SOA and EDA. J. Ocean Univ. China 2015, 14, 261–268. [Google Scholar] [CrossRef]
- Yu, Y.; Xu, H.P.; Xu, C.W. Development of a Plug-and-Play Monitoring System for Cabled Observatories in the East China Sea. Sensors 2015, 15, 17926–17943. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Xu, H.; Yü, Y.; Qin, R.; Xu, C. Design and Implementation of a Data Distribution System for Xiaoqushan Submarine Comprehensive Observation and Marine Equipment Test Platform. Comput. Geosci. 2015, 82, 31–37. [Google Scholar] [CrossRef]
- Zhou, Y.; Qin, R.; Xu, H.; Sadiq, S.; Yu, Y. A Data Quality Control Method for Seafloor Observatories: The Application of Observed Time Series Data in the East China Sea. Sensors 2018, 18, 2628. [Google Scholar] [CrossRef]
- Chen, J.; Xu, H.P.; Qin, R.F. Implementation of the WebGIS of East China Sea seafloor observatory system. In Proceedings of the OCEANS Conference, Taipei, Taiwan, 7–10 April 2014; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Original Observatory | Upgrade Observatory |
|---|---|---|
| Video | √ | √ |
| CO2 | × | √ |
| OBS | × | √ |
| CTD | √ | √ |
| Turbidity | √ | √ |
| Underwater CO2 | × | √ |
| PH | × | √ |
| Tide and Wave | × | √ |
| ADCP | √ | √ |
| Imaging Sonar | × | √ |
| Magnetometer | × | √ |
| Observatory Node | Sensor | Observation Parameter | Sampling Interval |
|---|---|---|---|
| Node 1 (Node of Shanghai Science and Technology Commission) | CTD/SBE16 | Temperature, Conductivity, Dissolved oxygen, Depth | 50 s |
| CTD/SBE26 | Temperature, Conductivity, Depth | 10 s | |
| LISST-100x | Granularity, Temperature | 10 s | |
| AWAC | Seawater flow field | 25 min | |
| Camera | Real-time Video | continuous | |
| Node 2 (Node of State Oceanic Administration) | Chlorophyll Meter (SDIOI) | Chlorophyll concentration | 5 s |
| CTD (SDIOI) | Temperature, Conductivity, Depth, Turbidity | 5 s | |
| CTD (NOTC) | Temperature, Conductivity, Depth | 8 s | |
| CTD (NOTC) | Temperature, Conductivity, Depth | 8 s | |
| ADCP (Linkquest) | Seawater flow field | 5 min | |
| Camera | Real-time Video | continuous | |
| Node 3 (Node of National High-tech Research and Development Plan) | RBR concerto | Temperature, Conductivity, Depth | 30 s |
| Chlorophyll Meter | Chlorophyll concentration | 30 s | |
| Dissolved Oxygen Sensor | Dissolved oxygen concentration | 30 s | |
| Turbidity Sensor | Turbidity | 30 s | |
| SUNA Sensor | Nitrate concentration | 5 min | |
| HydroC PAH | Concentration of polycyclic aromatic hydrocarbons | 5 s | |
| CO2-Pro CV | Carbon dioxide concentration | 30 min | |
| Methane Sensor | Methane concentration | 10 s | |
| ADV/Nortek Vector Current Meter | Single point velocity | 10 min | |
| ADCP/WHMW300-I-UG11 | Profile velocity | 1 min | |
| TDO-33B | Seismic data | 0.01 s | |
| Camera | Real-time Video | program control |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Xu, H.; Xu, C. A Sensor Web Prototype for Cabled Seafloor Observatories in the East China Sea. J. Mar. Sci. Eng. 2019, 7, 414. https://doi.org/10.3390/jmse7110414
Yu Y, Xu H, Xu C. A Sensor Web Prototype for Cabled Seafloor Observatories in the East China Sea. Journal of Marine Science and Engineering. 2019; 7(11):414. https://doi.org/10.3390/jmse7110414
Chicago/Turabian StyleYu, Yang, Huiping Xu, and Changwei Xu. 2019. "A Sensor Web Prototype for Cabled Seafloor Observatories in the East China Sea" Journal of Marine Science and Engineering 7, no. 11: 414. https://doi.org/10.3390/jmse7110414
APA StyleYu, Y., Xu, H., & Xu, C. (2019). A Sensor Web Prototype for Cabled Seafloor Observatories in the East China Sea. Journal of Marine Science and Engineering, 7(11), 414. https://doi.org/10.3390/jmse7110414