An Operational Marine Oil Spill Forecasting Tool for the Management of Emergencies in the Italian Seas

 ,
, 

 ,
,  ,
,  ,
,  and
and
Abstract
1. Introduction
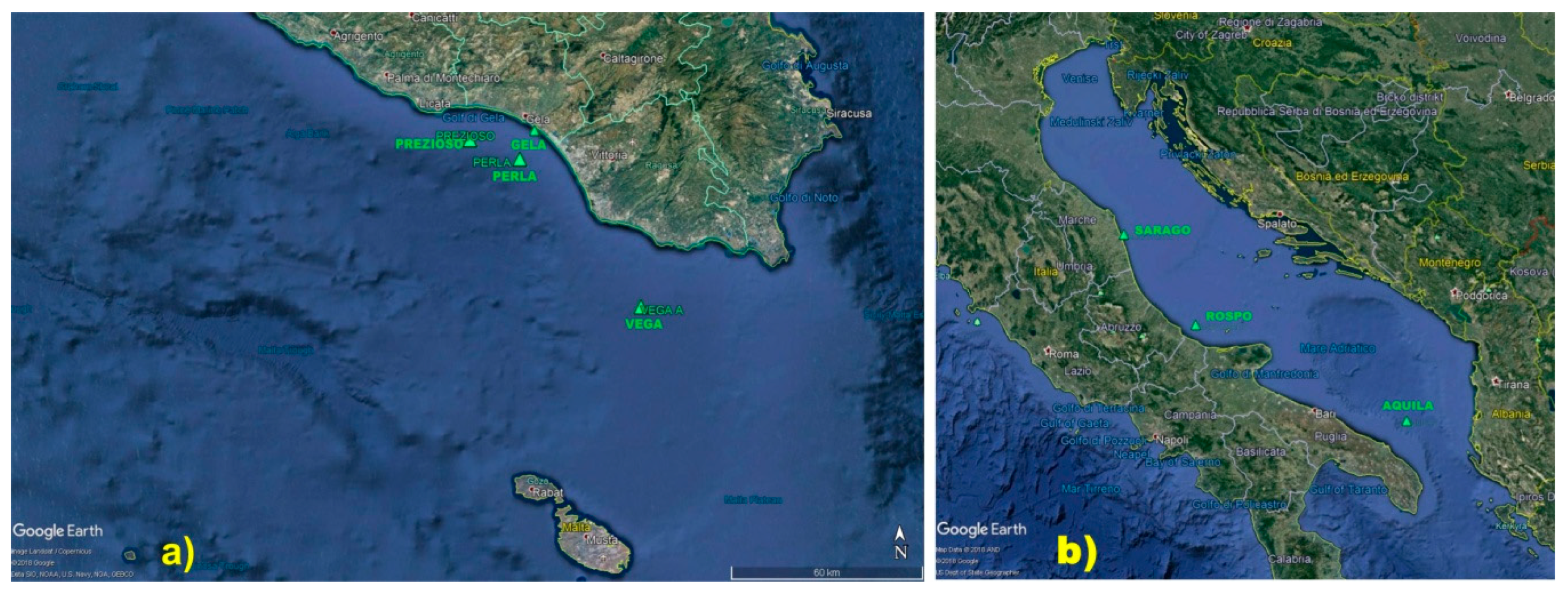
2. The Oil Fields in the Italian Seas
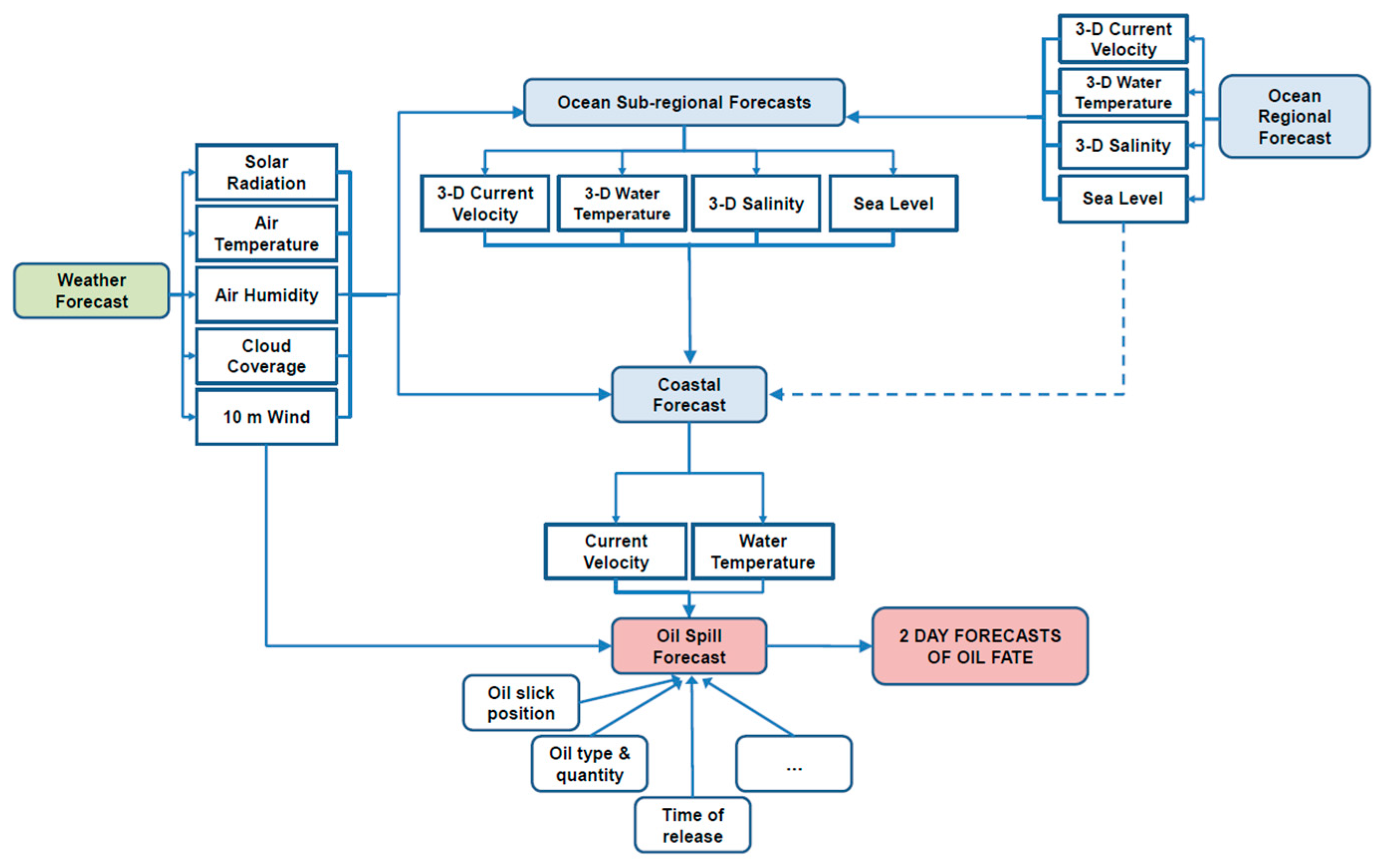
3. The Numerical System
3.1. The Oil Slick Model
3.2. The Hydrodynamic Models
3.2.1. The Sicily Channel
3.2.2. The Adriatic Sea
4. Results
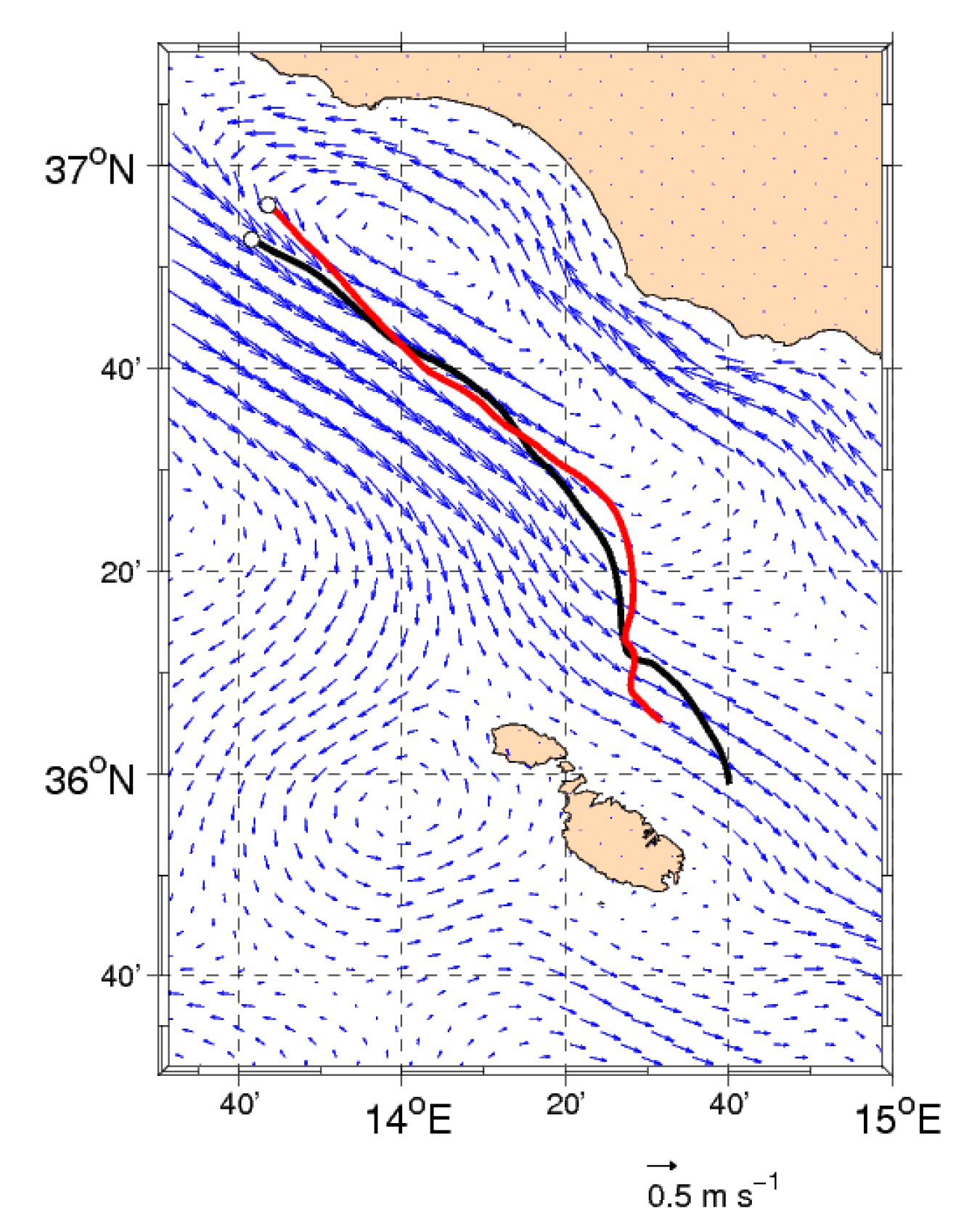
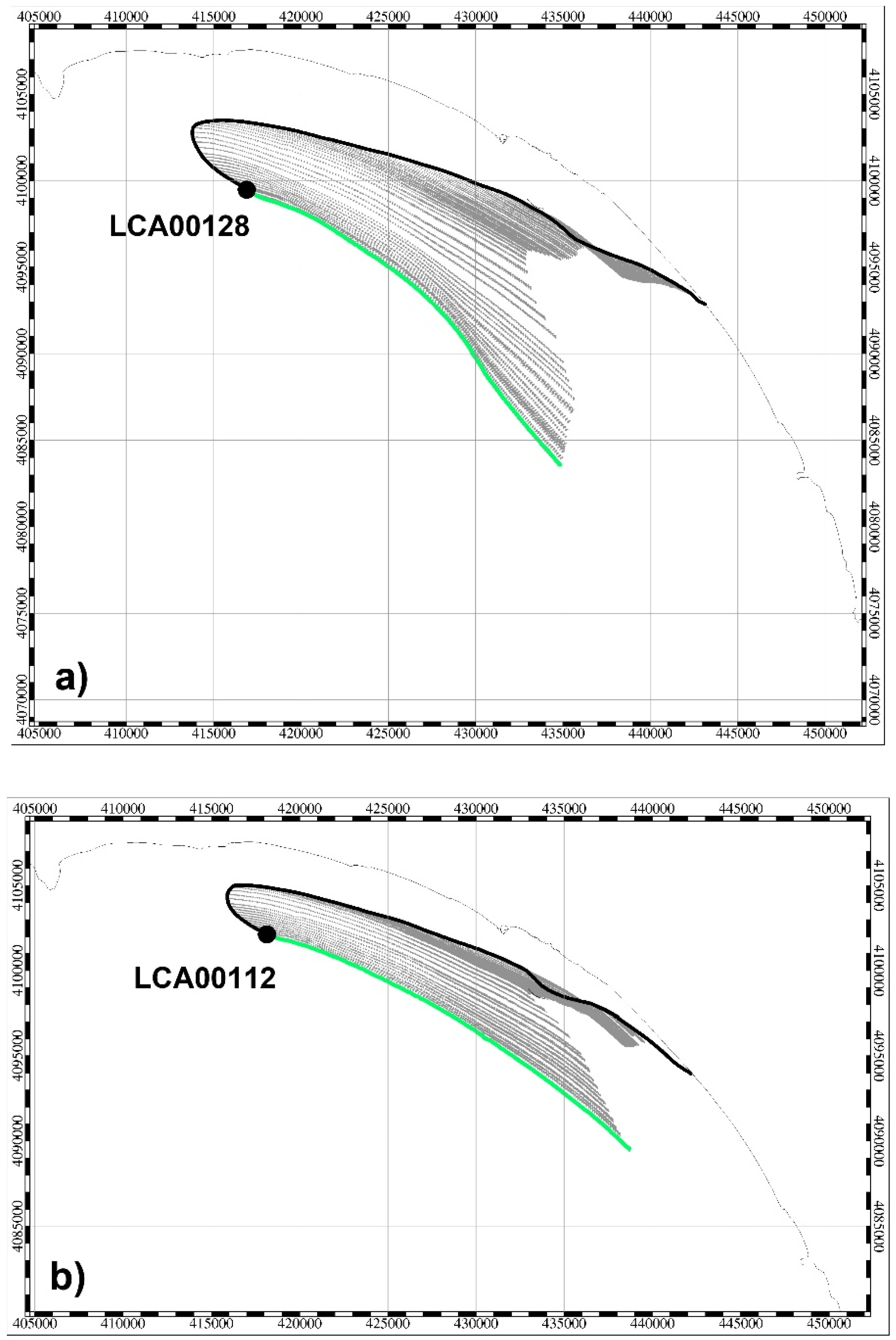
4.1. Numerical System Validation
4.2. The Products
4.2.1. The Daily Bulletin
4.2.2. Hazard Assessment
5. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cucco, A.; Ribotti, A.; Olita, A.; Fazioli, L.; Sorgente, B.; Sinerchia, M.; Satta, A.; Perilli, A.; Borghini, M.; Schroeder, K.; et al. Support to oil spill emergencies in the Bonifacio Strait, western Mediterranean. Ocean Sci. 2012, 8, 443–454. [Google Scholar] [CrossRef]
- Cucco, A.; Sinerchia, M.; Ribotti, A.; Olita, A.; Fazioli, L.; Sorgente, B.; Perilli, A.; Borghini, M.; Schroeder, K.; Sorgente, R. A high resolution real time forecasting system for predicting the fate of oil spills in the Strait of Bonifacio (western Mediterranean). Mar. Pollut. Bull. 2012, 64, 1186–1200. [Google Scholar] [CrossRef]
- Olita, A.; Cucco, A.; Simeone, S.; Ribotti, A.; Fazioli, L.; Sorgente, B.; Sorgente, R. Oil spill hazard and risk assessment for the shorelines of a Mediterranean coastal archipelago. Ocean Coast. Manag. 2012, 57, 44–52. [Google Scholar] [CrossRef]
- Jones, C.E.; Dagestad, K.-F.; Breivik, Ø.; Holt, B.; Röhrs, J.; Christensen, K.H.; Espeseth, M.; Brekke, C.; Skrunes, S. Measurement and modeling of oil slick transport. J. Geophys. Res. Ocean 2016, 121, 7759–7775. [Google Scholar] [CrossRef]
- Alves Tiago, M.; Kokinou, E.; Zodiatis, G.; Lardner, R.; Panagiotakis, C.; Radhakrishnan, H. Modelling of oil spills in confined maritime basins: The case for early response in the Eastern Mediterranean Sea. Environ. Pollut. 2015, 206, 390–399. [Google Scholar] [CrossRef]
- Azevedo, A.; Fortunato, A.B.; Epifânio, B.; den Boer, S.; Oliveira, E.R.; Alves, F.L.; de Jesus, G.; Gomes, J.L.; Oliveira, A. An oil risk management system based on high-resolution hazard and vulnerability calculations. Ocean Coast Manag. 2017, 136, 1–18. [Google Scholar] [CrossRef]
- De Dominicis, M.; Bruciaferri, D.; Gerin, R.; Pinardi, N.; Poulain, P.M.; Garreau, P.; Zodiatis, G.; Perivoliotis, L.; Fazioli, L.; Sorgente, R.; et al. A multi-model assessment of the impact of currents, waves and wind in modelling surface drifters and oil spill. Top. Stud. Oceanogr. 2016, 133, 21–38. [Google Scholar] [CrossRef]
- Zodiatis, G.; De Dominicis, M.; Perivoliotis, L.; Radhakrishnan, H.; Georgoudis, E.; Sotillo, M.; Lardner, R.W.; Krokos, G.; Bruciaferri, D.; Clementi, E.; et al. The Mediterranean Decision Support System for Marine Safety dedicated to oil slicks predictions. Deep Sea Res. 2016, 133, 4–20. [Google Scholar] [CrossRef]
- Coppini, G.; De Dominicis, M.; Zodiatis, G.; Lardner, R.; Pinardi, N.; Santoleri, R.; Colella, S.; Bignami, F.; Hayes, D.R.; Soloviev, D.; et al. Hindcast of Oil Spill Pollution during the Lebanon Crisis, July–August 2006. Mar. Pollut. Bull. 2011, 62, 140–153. [Google Scholar] [CrossRef]
- Sorgente, R.; Tedesco, C.; Pessini, F.; De Dominicis, M.; Gerin, R.; Olita, A.; Fazioli, L.; Di Maio, A.; Ribotti, A. Forecast of drifter trajectories using a Rapid Environmental Assessment based on CTD observations. Top. Stud. Oceanogr. 2016, 133, 39–53. [Google Scholar] [CrossRef]
- De Dominicis, M.; Leuzzi, G.; Monti, P.; Pinardi, N.; Poulain, P.-M. Eddy diffusivity derived from drifter data for dispersion model applications. Ocean Dyn. 2012, 62, 1381–1398. [Google Scholar] [CrossRef]
- De Dominicis, M.; Pinardi, N.; Zodiatis, G.; Lardner, R. MEDSLIK-II, a Lagrangian marine surface oil spill model for short-term forecasting. Part 1: Theory. Geosci. Model Dev. 2013, 6, 1851–1869. [Google Scholar] [CrossRef]
- De Dominicis, M.; Pinardi, N.; Zodiatis, G.; Archetti, R. MEDSLIK-II, a Lagrangian marine surface oil spill model for short-term forecasting. Part 2: Numerical Simulations and Validations. Geosci. Model Dev. 2013, 6, 1871–1888. [Google Scholar] [CrossRef]
- Liubartseva, S.; De Dominicis, M.; Oddo, P.; Coppini, G.; Pinardi, N.; Greggio, N. Oil spill hazard from dispersal of oil along shipping lanes in the Southern Adriatic and Northern Ionian Seas. Mar. Pollut. Bull. 2015, 90, 259–272. [Google Scholar] [CrossRef]
- Ribotti, A.; Cucco, A.; Olita, A.; Sinerchia, M.; Fazioli, L.; Satta, A.; Borghini, M.; Schroeder, K.; Perilli, A.; Sorgente, B.; et al. An integrated operational system for the Coast Guard management of oil spill emergencies in the Strait of Bonifacio. In Proceedings of the Sixth International Conference on EuroGOOS, 4–6 October 2011. [Google Scholar]
- Zodiatis, G.; Kirkos, G. Projects on Oil Spill Response in the Mediterranean Sea. In Oil Pollution in the Mediterranean Sea: Part I—The International Context. Handb. Environ. Chem. 2017, 30. [Google Scholar] [CrossRef]
- United Nations Office for Disaster Risk Reduction (UNISDR). The Sendai Framework for Disaster Risk Reduction 2015–2030 Paper. Available online: http://www.unisdr.org/we/inform/publications/43291 (accessed on 30 November 2018).
- Italian Ministry of Economic Development. Offshore Exploitation Platforms List in the Italian Seas. Available online: http://unmig.sviluppoeconomico.gov.it/unmig/strutturemarine/elenco.asp (accessed on 30 November 2018).
- Coppini, G.; Marra, P.; Lecci, R.; Pinardi, N.; Cretì, S.; Scalas, M.; Tedesco, L.; D’Anca, A.; Fazioli, L.; Olita, A.; et al. SeaConditions: A web and mobile service for safer professional and recreational activities in the Mediterranean Sea. Nat. Hazards Earth Syst. Sci. 2017, 17, 533–547. [Google Scholar] [CrossRef]
- De Dominicis, M.; Falchetti, S.; Trotta, F.; Pinardi, N.; Giacomelli, L.; Napolitano, E.; Fazioli, L.; Sorgente, R.; Haley, P.F.J., Jr.; Lermusiaux, P.; et al. A relocatable ocean model in support of environmental emergencies—The Costa Concordia emergency case. Ocean Dyn. 2014, 64, 667–688. [Google Scholar] [CrossRef]
- Oddo, P.; Pinardi, N. Lateral Open Boundary Conditions for Nested Limited Area Models: Process selective approach. Ocean Model. 2008, 20, 134–156. [Google Scholar] [CrossRef]
- Sorgente, S.; Drago, A.F.; Ribotti, A. Seasonal variability in the Central Mediterranean Sea Circulation. Ann. Geophys. 2003, 20, 299–322. [Google Scholar] [CrossRef]
- Napolitano, E.; Iacono, R.; Sorgente, R.; Fazioli, L.; Olita, A.; Cucco, A.; Oddo, P.; Guarnieri, A. The regional forecasting systems of the Italian seas. J. Oper. Oceanogr. 2016, 9, s66–s76. [Google Scholar] [CrossRef]
- Gabersek, S.; Sorgente, R.; Natale, S.; Ribotti, A.; Olita, A.; Astraldi, M.; Borghini, M. The Sicily Channel Regional Model forecasting system: Initial boundary conditions sensitivity and case study evaluation. Ocean Sci. 2007, 3, 31–41. [Google Scholar] [CrossRef]
- Fazioli, L.; Olita, A.; Cucco, A.; Tedesco, C.; Ribotti, A.; Sorgente, R. Impact of different initialisation methods on the quality of sea forecasts for the Sicily Channel. J. Oper. Oceanogr. 2016, 9 (Suppl. 1), s119–s130. [Google Scholar] [CrossRef]
- Drago, A.F.; Sorgente, S.; Ribotti, A. A high resolution hydrodynamical 3D model of the Malta shelf area. Ann. Geophys. 2003, 20, 323–344. [Google Scholar] [CrossRef]
- The MEDSLIK-II Oil Spill Model Community. Available online: http://medslikii.bo.ingv.it (accessed on 30 November 2018).
- The International Tanker Owners Pollution Federation Limited (ITOPF). Available online: http://www.itopf.com (accessed on 30 November 2018).
- Sorgente, R.; Olita, A.; Oddo, P.; Fazioli, L.; Ribotti, A. Numerical simulation and decomposition of kinetic energies in the central Mediterranean: Insight on mesoscale circulation and energy conversion. In Special Issue, ECOOP (European Coastal-shelf sea Operational Observing and forecasting system Project). Ocean Sci. 2011, 7, 503–519. [Google Scholar] [CrossRef]
- Blumberg, A.F.; Mellor, G.L. A description of a three-dimensional coastal ocean circulation model. In Three-Dimensional Coastal Ocean Models, 2nd ed.; Heaps, N., Ed.; American Geophysical Union: Washington, DC, USA, 1987; Volume 4, pp. 1–39. [Google Scholar]
- The Copernicus Marine Environment Monitoring Service. Available online: http://marine.copernicus.eu (accessed on 30 November 2018).
- Burchard, H.; Petersen, O. Models of turbulence in the marine environment—A comparative study of two equation turbulence models. J. Mar. Syst. 1999, 21, 29–53. [Google Scholar] [CrossRef]
- Umgiesser, G.; Ferrarin, C.; Cucco, A.; De Pascalis, F.; Bellafiore, D.; Ghezzo, M.; Bajo, M. Comparative hydrodynamics of 10 Mediterranean lagoons by means of numerical modeling. J. Geophys. Res. Ocean 2014, 119, 2212–2226. [Google Scholar] [CrossRef]
- Kallos, G. The regional weather forecasting system SKIRON: An overview. In Proceedings of the Symposium on Regional Weather Prediction on Parallel Computer Environments, Athens, Greece, 15–17 October 1997; pp. 109–122. [Google Scholar]
- Fairall, C.W.; Bradley, E.F.; Rogers, D.P.; Edson, J.B.; Young, G.S. Bulk parameterization of air-sea fluxes for Tropical Ocean-Global Atmosphere Coupled-Ocean Atmosphere Response Experiment. J. Geophys. Res. 1996, 101, 3747–3764. [Google Scholar] [CrossRef]
- Carrere, L.; Lyard, F.; Cancet, M.; Guillot, A.; Roblou, L. FES2012: A new global tidal model taking advantage of nearly 20 years of altimetry. In Proceedings of the 20 Years of Progress in Radar Altimetry Symposium, Venice, Italy, 24–29 September 2013. [Google Scholar]
- The Satellite Altimetry Database of the AVISO+ Mission. Available online: http://www.aviso.altimetry.fr (accessed on 30 November 2018).
- Ludwig, W.; Dumont, E.; Maybeck, M.; Heussner, S. River discharges of water and nutrients to the Mediterranean and Black Sea: Major drivers for ecosystem changes during past and future decades? Prog. Oceanogr. 2009, 80, 199–217. [Google Scholar] [CrossRef]
- Ferrarin, C.; Davolio, S.; Bellafiore, D.; Ghezzo, M.; Maicu, F.; Mc Kiver, W.; Drofa, O.; Umgiesser, G.; Bajo, M.; De Pascalis, F.; et al. Cross-scale operational oceanography in the Adriatic Sea. J. Oper. Oceanogr. 2018. submitted for publication. [Google Scholar]
- Orlandi, E.; Fierli, F.; Davolio, S.; Buzzi, A.; Drofa, O. A nudging scheme to assimilate satellite brightness temperature in a meteorological model: Impact on representation of African mesoscale convective systems. Q. J. R. Meteorol. Soc. 2010, 136, 462–474. [Google Scholar] [CrossRef]
- Italian Research Council—Institute of Atmospheric Sciences and Climate (CNR-ISAC). Daily Numerical Weather Forecasts. Available online: http://www.isac.cnr.it/dinamica/projects/forecasts (accessed on 30 November 2018).
- NOAA/National Weather Service, National Centers for Environmental Prediction, Environmental Modeling Center. Available online: http://www.emc.ncep.noaa.gov/GFS (accessed on 30 November 2018).
- Liu, Y.; Weisberg, R. Evaluation of trajectory modeling in different dynamic region using normalized cumulative Lagrangian separation. J. Geophys. Res. Ocean 2011, 116, C09013. [Google Scholar] [CrossRef]
- Lermusiaux, P.F.J.; Robinson, A.R. Features of dominant mesoscale variability, circulation patterns and dynamics in the Strait of Sicily. Deep Sea Res. 2001, 48, 1953–1997. [Google Scholar] [CrossRef]
- Liu, Y.; Weisberg, R.H.; Hu, C.; Zheng, L. Tracking the Deepwater Horizon oil spill: A modeling perspective. Eos Trans. 2011, 92, 45–46. [Google Scholar] [CrossRef]
- Liu, Y.; Weisberg, R.H.; Hu, C.; Zheng, L. Trajectory forecast as a rapid response to the Deepwater Horizon oil spill, in Monitoring and Modeling the Deepwater Horizon Oil Spill: A Record-Breaking Enterprise. Geophys. Monogr. Ser. 2011, 195, 153–165. [Google Scholar] [CrossRef]
- Weisberg, R.H.; Zheng, L.; Liu, Y. On the movement of Deepwater Horizon Oil to northern Gulf beaches. Ocean Modell. 2017, 111, 81–97. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area | Oil Field | Platforms | Storing Facility | Wells | Distance from Land (Km) | Depth (m) |
|---|---|---|---|---|---|---|
| Sicily Channel | Prezioso | 1 | Pipeline | 9 | 12 | 45 |
| Perla | 1 | Pipeline | 4 | 13 | 70 | |
| Gela 1 | 1 | Pipeline | 11 | 2 | 10 | |
| Vega A | 1 | FSO | 20 | 20 | 124 | |
| Central Adriatic | Sarago | 2 | Pipeline | 1 + 5 | 3–4 | 12 |
| Rospo | 3 | FSO | 9 + 10 + 12 | 19–21 | 80 | |
| Southern Adriatic | Aquila | 2 | FPSO | 1 + 1 | 40–45 | 820 |
| TEST 1 | ||||
|---|---|---|---|---|
| 1 h | 6 h | 12 h | AV3 | |
| LCA00128 | 0.6 | 0.6 | 0.7 | 0.6 |
| LCA00112 | 0.7 | 0.8 | 0.8 | 0.7 |
| TEST 2 | ||||
| LCA00128 | 0.4 | 0.5 | 0.7 | 0.4 |
| LCA00112 | 0.4 | 0.7 | 0.7 | 0.5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ribotti, A.; Antognarelli, F.; Cucco, A.; Falcieri, M.F.; Fazioli, L.; Ferrarin, C.; Olita, A.; Oliva, G.; Pes, A.; Quattrocchi, G.; et al. An Operational Marine Oil Spill Forecasting Tool for the Management of Emergencies in the Italian Seas. J. Mar. Sci. Eng. 2019, 7, 1. https://doi.org/10.3390/jmse7010001
Ribotti A, Antognarelli F, Cucco A, Falcieri MF, Fazioli L, Ferrarin C, Olita A, Oliva G, Pes A, Quattrocchi G, et al. An Operational Marine Oil Spill Forecasting Tool for the Management of Emergencies in the Italian Seas. Journal of Marine Science and Engineering. 2019; 7(1):1. https://doi.org/10.3390/jmse7010001
Chicago/Turabian StyleRibotti, Alberto, Fabio Antognarelli, Andrea Cucco, Marcello Francesco Falcieri, Leopoldo Fazioli, Christian Ferrarin, Antonio Olita, Gennaro Oliva, Andrea Pes, Giovanni Quattrocchi, and et al. 2019. "An Operational Marine Oil Spill Forecasting Tool for the Management of Emergencies in the Italian Seas" Journal of Marine Science and Engineering 7, no. 1: 1. https://doi.org/10.3390/jmse7010001
APA StyleRibotti, A., Antognarelli, F., Cucco, A., Falcieri, M. F., Fazioli, L., Ferrarin, C., Olita, A., Oliva, G., Pes, A., Quattrocchi, G., Satta, A., Simeone, S., Tedesco, C., Umgiesser, G., & Sorgente, R. (2019). An Operational Marine Oil Spill Forecasting Tool for the Management of Emergencies in the Italian Seas. Journal of Marine Science and Engineering, 7(1), 1. https://doi.org/10.3390/jmse7010001