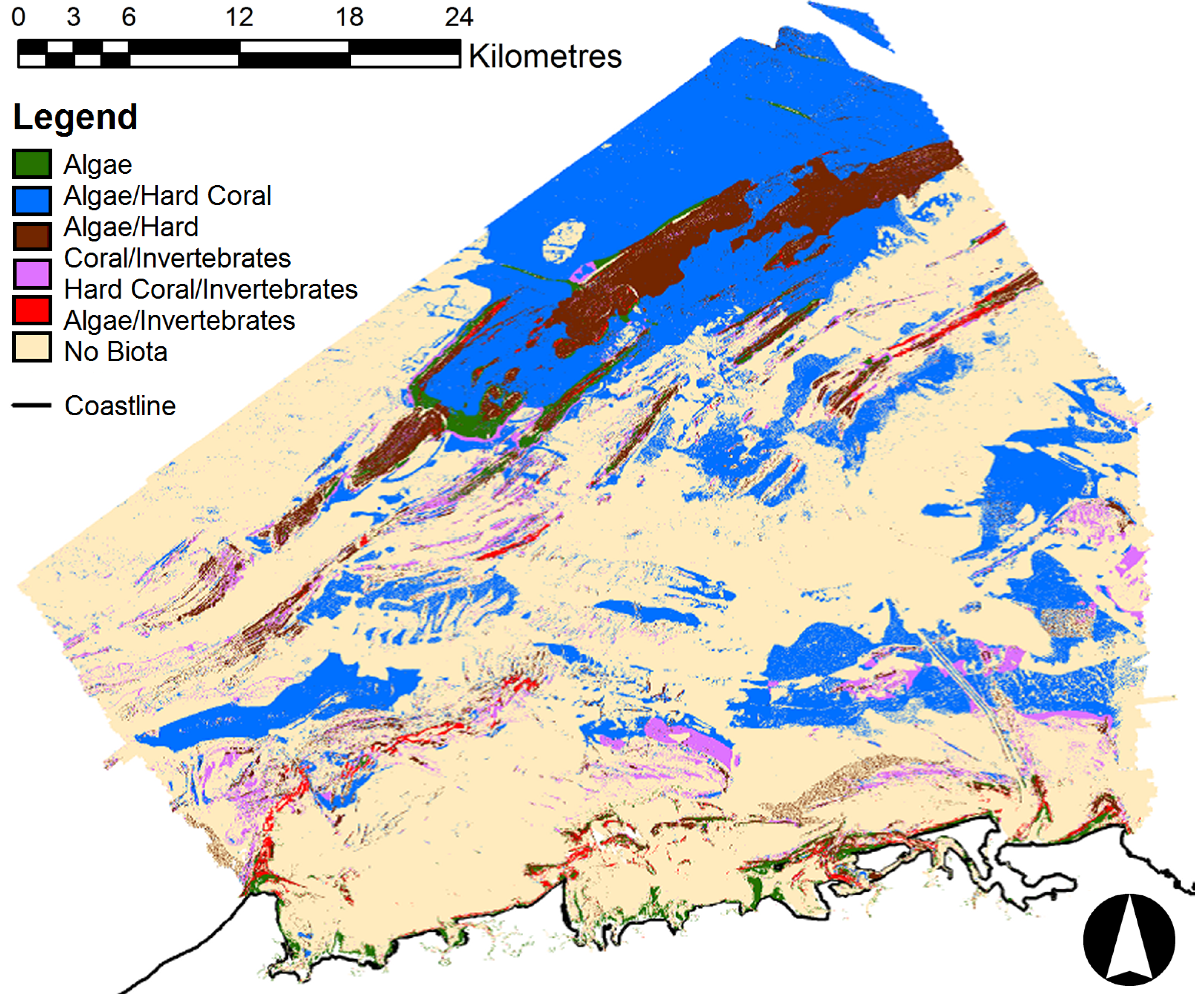
Figure 7 shows the final habitat classification map for the offshore Port Hedland region that has a spatial resolution of five metres. The classification results confirm that mixed habitat types are common. The largest class comprised “no epibenthos evident” (64.08%), which corresponded to mostly flat areas between major ridgelines. The largest habitat comprised areas of algae containing frequent hard corals. This habitat covered 23.47% of the mapped area, and was mostly found in the mid-shore regions and in the relatively flat offshore area in the north-east. Mixed environments, such as algae/hard corals/invertebrates (5.52%), and hard coral/invertebrates (3.58%) are the next most common groups, which occurred in association with mid-shore and offshore ridge lines. Only one class occurred that was comprised of a single biota type occurred (algae), which covered 1.76% of the area. Seagrass and Algae/Hard Coral were not classified due to lack of training data, inferring that they were very rare over the entire study region.
Figure 7.
Final habitat classification result showing spatial distribution of habitats.
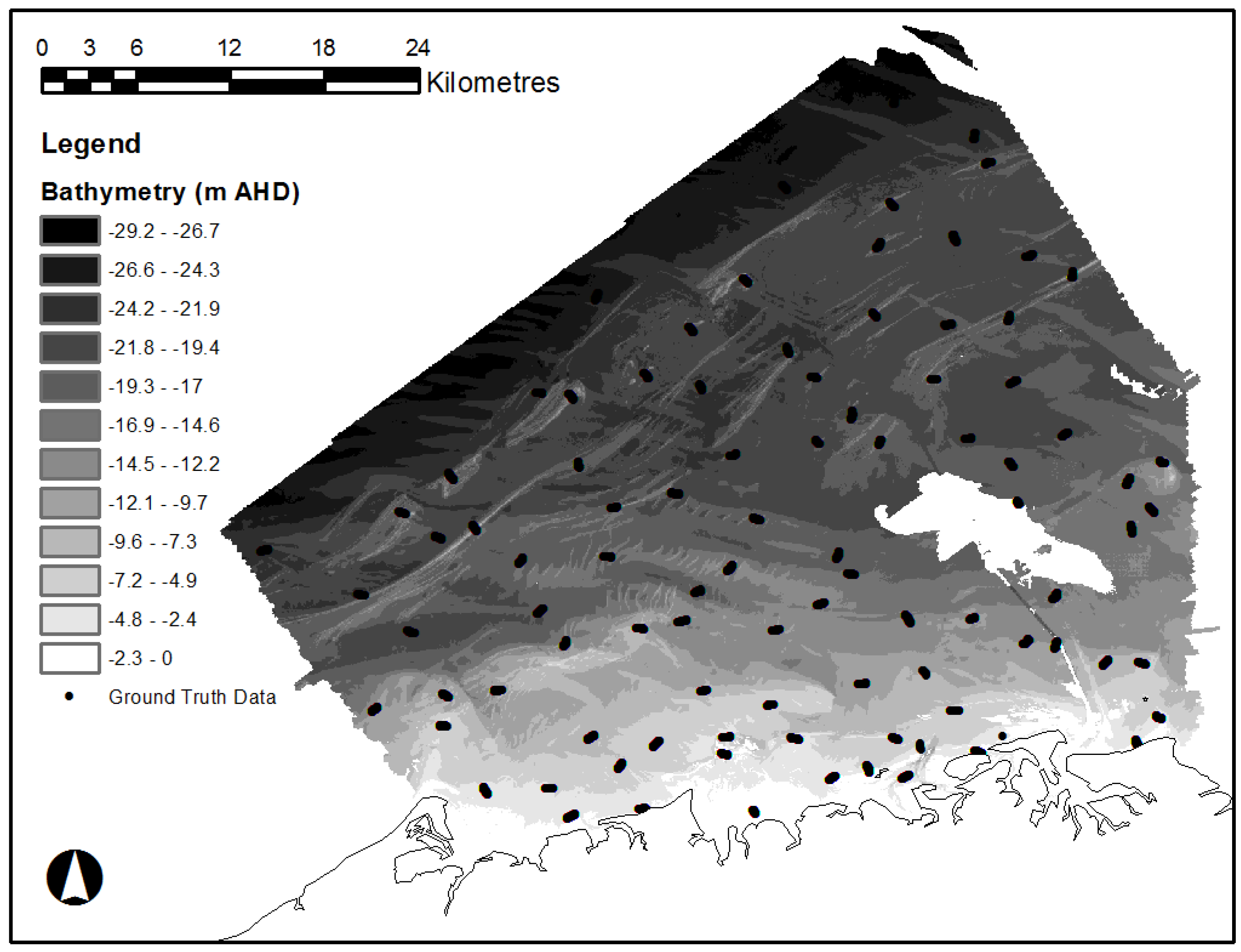
The “white” spaces in the LiDAR dataset represented a data gap captured during survey. Using the ground truthing data as a guide, this area was assumed to be entirely classified as “No Epibenthos Evident” (SKM, 2009) [
26].
Table 4.
Aerial extent of each significant habitat class identified in the mapping region as shown in
Figure 7. * BPPH: Benthic Primary Producer Habitat. ** Sponge gardens and other non-photosynthetic invertebrates are not classed as BPPs, however their significance has been recognised in the Environmental Assessment Guideline 3 [
24]. *** Excluding ephemeral benthic microalgae (and other photosynthetic biota) which should be considered BPPs, however are too small to detect in visual ground trothing program.
Analysis of Accuracy
An error matrix has been calculated for the final product (
Table 5), based on the methodology outlined in the previous section titled “Error Assessment”. The overall accuracy (calculated as a percentage of accurate point predictions) of the six habitat classification has been found to be 97.6%, with a kappa coefficient of 0.9614. An error assessment for the classification that excluded the contributions of the hydrodynamic parameters gave a lower accuracy of 89.9% and kappa coefficient of 0.8372. This indicates an excellent classification result when hydrodynamic parameters are included with an improvement in accuracy of 7.7% (kappa increase of 0.1242) for this case study.
Table 5.
Error matrix for the six habitat decision tree classification. Numbers in bold represent accurate incidences of classification.
Table 5.
Error matrix for the six habitat decision tree classification. Numbers in bold represent accurate incidences of classification.
| Class | Algae | Invert | Algae/Invert | Algae/Hard Coral/Invert | Hard Coral/Invert | No Epibenthos Evident | Total |
|---|
| Algae | 15 | 0 | 0 | 1 | 0 | 1 | 17 |
| Invertebrates | 0 | 179 | 0 | 0 | 0 | 1 | 180 |
| Algae/Invert | 1 | 0 | 37 | 3 | 0 | 1 | 42 |
| Algae/Hard Coral/Invert | 1 | 0 | 4 | 200 | 2 | 1 | 208 |
| Hard Coral/Invert | 0 | 0 | 0 | 0 | 58 | 4 | 62 |
| No Epibenthos Evident | 0 | 3 | 1 | 1 | 3 | 645 | 653 |
| Total | 17 | 182 | 42 | 205 | 63 | 653 | 1162 |
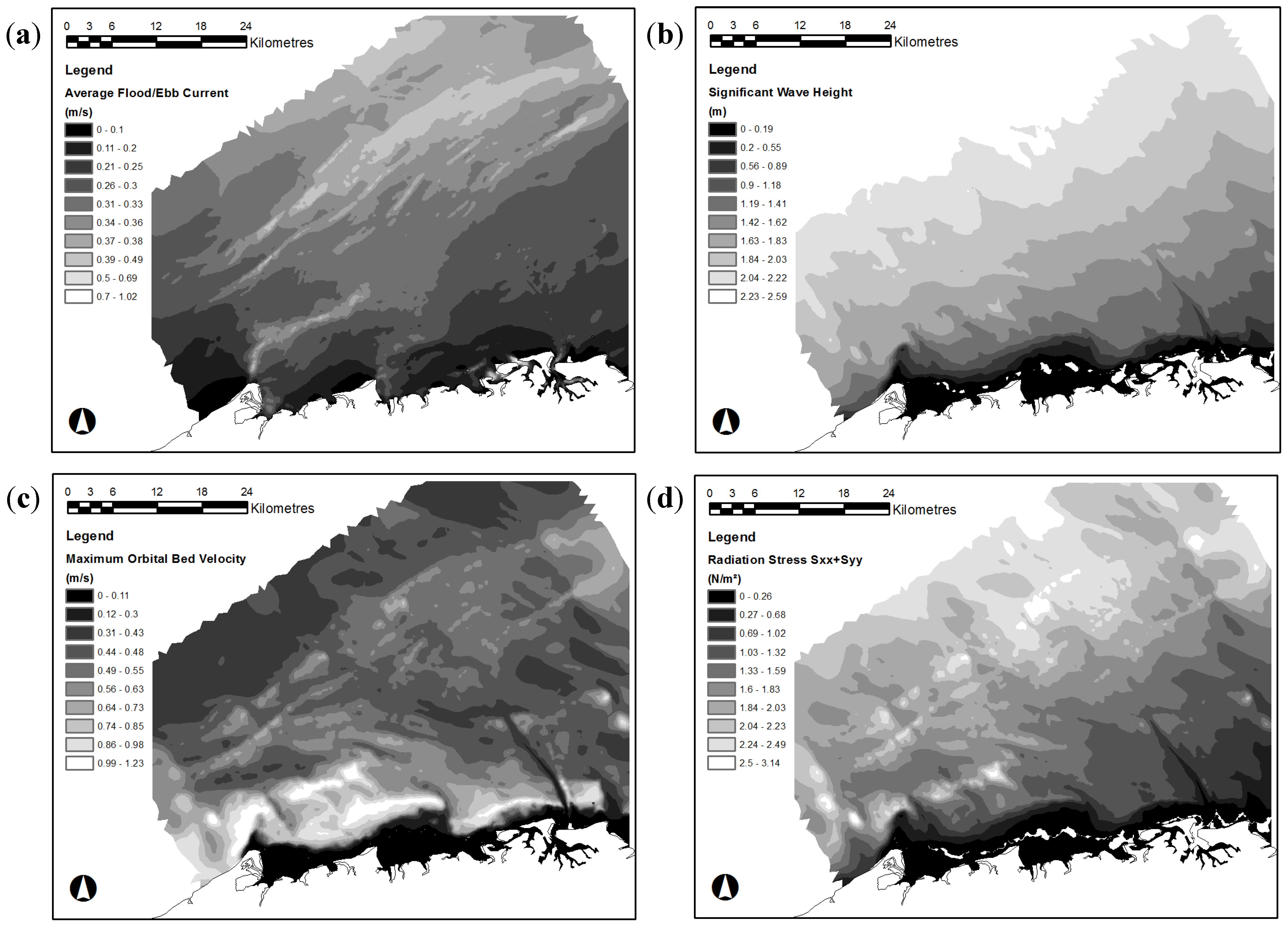
Further analysis was undertaken to determine the importance of each hydrodynamic parameter in the habitat mapping classification process at this particular location. This was achieved by removing each hydrodynamic parameter from the classification and documenting the corresponding accuracy achieved. Results from this exercise are shown in
Table 6, and demonstrates that current was the least important hydrodynamic parameter, and the remaining three parameters related to wave action all contributed a similar amount to the classification accuracy. The best classification result was achieved by the inclusion of wave height, radiation stress, and orbital velocity, with the absence of current (although it was very similar to the accuracy that included all hydrodynamic parameters).
Table 6.
Test results to determine importance of hydrodynamic parameters to the habitat mapping process.
Table 6.
Test results to determine importance of hydrodynamic parameters to the habitat mapping process.
| Missing Hydrodynamic Data | Accuracy (%) | Kappa Coefficient |
|---|
| Significant Wave Height | 94.6 | 0.9138 |
| Current | 97.9 | 0.9661 |
| Radiation Stress | 93.4 | 0.8948 |
| Orbital Velocity | 94.9 | 0.9199 |
In the absence of “current” data, the accuracy and corresponding kappa coefficient is marginally higher than when all oceanographic parameters are included. This apparent inconsistency is explained in Langley and Iba [
31], who demonstrated that when the number of input datasets increase for complex interactions, accuracy can decrease unless the number of training points also increases.
Overall, an area greater than 2000 km
2 was mapped during this study with a high level of accuracy (Kappa coefficient of >0.91). This is an excellent result particularly as traditional mapping methods heavily reliant on surveying would require many months of field time to produce a similar result, and would still require a large degree of interpolation (in the order of hundreds of metres [
32]) over heterogeneous environments. Effective benthic habitat mapping over a large area can only be achieved when biological results are linked to broader scale surrogates in a meaningful way [
1,
2].
Issues with classification accuracy are often chiefly attributable to the inherent noise which occurs in the LiDAR bathymetry dataset, including noise issues such as turbidity and the misidentification of sediment dunes as reefs. However, this has not been a significant issue with this data, and with the incorporation of current and wave data, the confidence was predicated to increase from 89.9% to the present 97.6%. The opportunity to obtain and incorporate hydrodynamic parameters, which are a useful surrogate for benthic habitat type, adds significantly to the overall rigour of the predictive process [
2,
33].
As expected, the classification result was influenced by gaps in the LiDAR information which were addressed in post-processing to fill the gaps and form a complete dataset. Two of the habitat classes, seagrass and algae/hard coral, were extremely rare in the final classification map which was reflected in the survey data.
In previous automated habitat mapping projects in the Pilbara, a common issue has been misclassification of sediment dunes as rocky reef systems, as the macro-geomorphology of these features is largely similar. However, this issue was not significant in the current study, with dune features being classified as “No Epibenthos Evident”, separated by the “Invertebrate” class in deeper areas (as observed).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}