Abstract
The rapid advancement of underwater wireless communication technologies is critical to unlocking the full potential of marine resource exploration and environmental monitoring. This paper reviews recent progress in three primary modalities: underwater acoustic communication, radio frequency (RF) communication, and underwater optical wireless communication (UWOC), each designed to address specific challenges posed by complex underwater environments. Acoustic communication, while effective for long-range transmission, is constrained by ambient noise and high latency; recent innovations in noise reduction and data rate enhancement have notably improved its reliability. RF communication offers high-speed, short-range capabilities in shallow waters, but still faces challenges in hardware miniaturization and accurate channel modeling. UWOC has emerged as a promising solution, enabling multi-gigabit data rates over medium distances through advanced modulation techniques and turbulence mitigation. Additionally, bio-inspired approaches such as electric field communication provide energy-efficient and robust alternatives under turbid conditions. This paper further examines the practical integration of these technologies in underwater platforms, including autonomous underwater vehicles (AUVs), highlighting trade-offs between energy efficiency, system complexity, and communication performance. By synthesizing recent advancements, this review outlines the advantages and limitations of current underwater communication methods and their real-world applications, offering insights to guide the future development of underwater communication systems for robotic and vehicular platforms.
1. Introduction
The ocean, covering over 70% of the Earth’s surface, represents one of the most vast and least explored frontiers of our planet. It harbors a diverse range of natural resources, including fisheries, oil reserves, mineral deposits, and novel biological compounds, many of which are vital to the global economy and scientific research. Consequently, there has been a sustained and growing effort to explore, monitor, and sustainably exploit these oceanic resources. This growing demand has elevated ocean exploration to a strategic priority across both scientific and industrial sectors, with applications spanning from climate research and deep-sea biodiversity studies to offshore energy extraction and national defense [1,2].
In this context, the development and deployment of robust communication technologies—especially underwater wireless communication systems—have become indispensable. These technologies serve as the backbone for enabling real-time data exchange between underwater platforms and surface control stations, significantly enhancing the operational capacity of oceanographic missions [3,4]. Underwater wireless communication now plays a critical role in a wide array of applications, including long-term marine environmental monitoring, underwater infrastructure inspection, seabed mapping, and collaborative operations involving multiple autonomous platforms [5,6].
However, unlike terrestrial or aerial wireless communication systems, underwater wireless communication faces a unique and complex set of environmental challenges. The underwater medium is characterized by high spatial and temporal variability [7,8], with factors such as salinity, hydrostatic pressure, temperature gradients, suspended particles, and dynamic currents all influencing signal propagation. In particular, seawater’s high conductivity and optical scattering properties in both shallow and deep-sea conditions severely attenuate electromagnetic and optical signals. These factors collectively contribute to unstable and low-bandwidth communication links [9,10], posing substantial obstacles to the reliable transmission of information over long distances. As such, overcoming these limitations necessitates the development of innovative and environment-adaptive communication strategies.
At the same time, the rapid evolution of underwater robotic systems—particularly autonomous underwater vehicles (AUVs)—has introduced new and stringent demands for underwater communication infrastructure. Unlike traditional manned submersibles, AUVs operate without human intervention, requiring robust and efficient communication channels for mission-critical tasks such as remote sensing, seabed inspection, collaborative navigation, and adaptive control. As these vehicles are increasingly deployed in heterogeneous and unstructured underwater environments, communication systems must support not only reliable real-time data transfer but also inter-vehicle coordination, energy-aware routing, and dynamic reconfiguration [11,12]. To this end, there is a growing need for integrated underwater communication architectures that interconnect a wide range of assets—surface buoys, research vessels, AUVs, and static sensor networks—forming a cohesive and intelligent marine information network.
Recent progress in underwater wireless communication technologies has primarily concentrated on three modalities: acoustic, radio frequency (RF), and optical wireless communication. Each of these methods addresses different operational ranges and environmental constraints. Acoustic communication remains the dominant technique for long-range transmission, owing to its superior propagation characteristics in water. However, its practical deployment is often limited by low data rates, high latency, and susceptibility to ambient noise and multipath effects [13]. RF communication offers the potential for higher data throughput but is constrained to very short ranges due to significant signal attenuation in seawater, along with challenges in hardware miniaturization and energy efficiency [14,15,16]. This limits its application mainly to shallow water scenarios. Optical wireless communication, on the other hand, has emerged as a promising mid-range solution, capable of supporting high-speed, low-latency links, particularly when advanced optical modulation and beam-forming techniques are employed [13,17]. More recently, biologically inspired mechanisms—such as electric field-based communication inspired by weakly electric fish—have garnered attention for their robustness and low energy consumption, making them especially suitable for operation in turbid and cluttered underwater environments [18].
However, despite the significant advancements in underwater wireless communication technologies, the relevant studies are reported across diverse and fragmented sources, which poses a challenge for researchers and engineers seeking a coherent understanding of the field. Therefore, a timely and systematic review is essential to consolidate existing knowledge and provide guidance for future research and development. In this review, we focus on the following three core aspects:
1. Comparative analysis of mainstream underwater wireless communication methods: We summarize the characteristics, limitations, and research outlooks of acoustic, electromagnetic, and optical communication technologies, highlighting their performance under different environmental conditions and identifying their most suitable application scenarios.
2. Integration strategies for multi-modal underwater communication: We explore how combining multiple communication modalities can overcome the limitations of individual methods, thereby enhancing communication robustness, supporting intelligent decision-making, and enabling cooperative behavior in underwater robot clusters.
3. Emerging trends and innovative directions in underwater communication: We discuss recent developments such as biologically inspired communication mechanisms and AI-assisted adaptive protocols, which represent promising frontiers in the evolution of next-generation underwater wireless communication systems.
The remainder of this paper is structured as follows. Section 2 introduces the key features, research progress, and typical applications of major underwater communication methods. Section 3 discusses the limitations of single-mode communication systems and the development of multimodal approaches. Section 4 presents emerging trends and frontier research topics before the conclusion.
2. Main Methods of Underwater Wireless Communication
Presently, underwater wireless communication predominantly hinges on three major technologies: acoustic communication, electromagnetic wave communication, and optical wireless communication. Each of these approaches possesses unique strengths and weaknesses, thereby rendering them appropriate for various application scenarios in underwater environments. Acoustic communication, for instance, offers significant advantages in terms of long-range transmission capabilities, making it particularly suitable for deep-sea exploration and large-scale underwater sensor networks. However, it suffers from relatively low data rates and high latency. On the other hand, electromagnetic wave communication, though limited in underwater propagation due to high attenuation, can achieve high data rates over short distances and is thus ideal for applications near the water surface or in shallow water. Optical wireless communication stands out for its extremely high data transmission rates and resistance to interference, but its performance is highly susceptible to water turbidity and particulate matter, confining its application to short-range, clear-water environments such as underwater data centers or high-definition video transmission systems. The diverse characteristics of these technologies drive the ongoing research into hybrid communication architectures and adaptive protocol designs, aiming to maximize the advantages of each method while mitigating their limitations in complex and dynamic underwater settings. Figure 1 shows the structure of underwater wireless communication system.
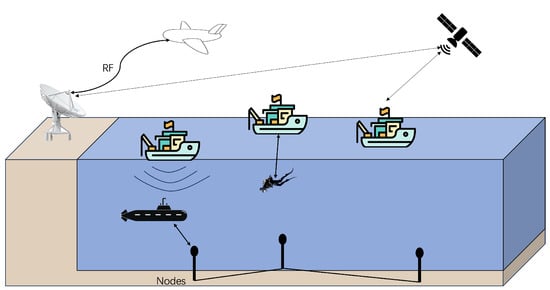
Figure 1.
A simple structure of underwater wireless communication system.
2.1. Underwater Acoustic Communication
Underwater acoustic communication, as one of the three primary communication methods for underwater environments, has significant advantages but also notable limitations. Its strengths include long propagation distances and effective performance in complex underwater scenarios, making it indispensable for submarine communications, marine monitoring, and underwater robotics. For instance, underwater acoustic communication is essential for maintaining communication links between surface stations and submerged platforms such as AUVs, allowing them to transmit real-time data for navigation, monitoring, and status updates. Additionally, acoustic waves can propagate over large distances, which makes this method suitable for deep-sea exploration where other communication methods such as radio-frequency signals would be ineffective [19]. However, it also suffers from critical drawbacks such as high noise levels, limited data transmission rates, and significant latency, primarily due to the challenging underwater environment and the nature of acoustic wave propagation. The complexity of water bodies—changes in salinity, temperature, and pressure—can affect signal attenuation, leading to signal distortion and long-distance loss. The wavelength of sound waves can also affect transmission distance, as shown in Figure 2. These factors further complicate underwater communication systems [20].
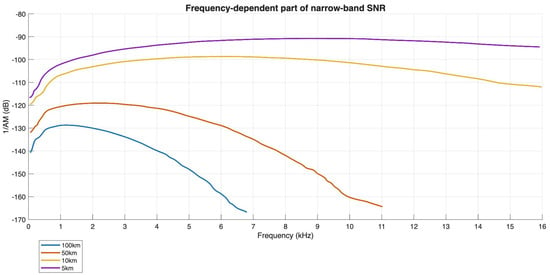
Figure 2.
The correlation between transmission distance and acoustic wavelength in underwater acoustic communication.
In recent years, researchers have directed significant attention toward tackling these limitations. Notably, high noise levels persist as a substantial obstacle, often obscuring vital signal components and undermining the reliability of underwater communication systems. The underwater medium is inherently noisy, with ocean currents, marine life activity, and anthropogenic interference constituting primary contributors to the acoustic noise spectrum. This complex acoustic backdrop can substantially degrade the fidelity of transmitted signals [21], introducing distortions that frequently intertwine with the desired signal, particularly in high-traffic maritime zones or regions of intense biological activity. Moreover, the challenge of disentangling noise-induced artifacts from legitimate signal components intensifies in such environments. To counteract these effects and enhance signal intelligibility [22], extensive research efforts have been channeled into advancing denoising methodologies and refining acoustic signal recognition algorithms. Researchers have explored a wide array of techniques, including conventional linear filtering approaches, adaptive wavelet transforms, empirical mode decomposition (EMD), and its more sophisticated iteration, variational mode decomposition (VMD) [23,24,25]. Table 1 provides a summary of traditional denoising approaches. While these traditional frameworks establish a foundational framework for noise mitigation, their efficacy in adapting to the temporal and spatial variability of dynamic underwater acoustic environments remains constrained [26]. Recent advancements have therefore shifted toward hybrid intelligent signal processing architectures and data-driven modeling techniques to address these shortcomings.

Table 1.
Summaryof traditional denoising approaches based on signal decomposition.
To further enhance denoising performance, deep learning (DL) approaches have been introduced as promising paradigms [5,31]. Table 2 shows basic information of deep learning-based denoising approaches. Specifically, convolutional neural networks (CNNs) have been employed for their exceptional feature extraction capabilities from spatial data, while recurrent neural networks (RNNs) excel in modeling temporal dependencies inherent in time-series acoustic signals. General adversarial networks (GANs), with their innovative adversarial training framework, have demonstrated remarkable potential in generating clean signals that closely mimic authentic acoustic patterns [4,32,33]. Beyond these core architectures, attention mechanisms have been seamlessly integrated to dynamically weigh critical signal components, thereby amplifying salient features while suppressing noise. Autoencoder frameworks, through their encoder-decoder architecture, have further advanced denoising by reconstructing signals with enhanced clarity, particularly in complex noise scenarios [4,34,35]. To bolster adaptability across diverse underwater environments, researchers have also incorporated data augmentation strategies. Techniques such as controlled noise addition and strategic masking operations have been systematically applied to diversify training datasets. These methods effectively expose models to a broader spectrum of noise conditions [36,37,38,39], thereby boosting resilience and generalization without compromising the integrity of the underlying signal structure. However, despite these advancements, several challenges persist in practical implementation. The computational overhead associated with training and deploying large-scale neural networks remains a significant bottleneck, especially for resource-constrained underwater devices. Real-time processing requirements further complicate deployment, as latency-sensitive applications demand immediate signal fidelity. Additionally, the reliance on extensive labeled training data poses logistical hurdles in data-scarce underwater domains. These limitations have catalyzed growing interest in developing lightweight neural architectures optimized for energy efficiency and speed [38,40], as well as self-supervised learning paradigms that minimize dependency on manual annotation [41,42]. This evolving research trajectory reflects the field’s commitment to balancing algorithmic sophistication with practical deployability in the demanding underwater communication landscape [31].
Table 2.
Summary of deep learning-based denoising approaches.
Additionally, the severely restricted bandwidth of underwater acoustic channels imposes a fundamental limitation on data transmission rates, making it inadequate for high-data-demand scenarios such as real-time video streaming or large-scale sensor networks. Unlike terrestrial systems, which leverage wide-frequency spectrums, underwater acoustic communication operates within a severely constrained frequency range. This inherent bandwidth limitation creates a trade-off between transmission rate, signal fidelity, and communication range [3,47]. Furthermore, multipath propagation effects, caused by signal reflections off the seafloor and underwater obstacles, further complicate the signal reception process. These phenomena lead to severe intersymbol interference, signal distortion, and increased latency, thereby undermining the stability and speed of underwater communication links [48,49].
Of equal importance to noise reduction is the enhancement of data transmission rates in underwater acoustic communication systems. These systems are inherently constrained by the limited bandwidth imposed by the physical properties of water, which significantly restricts their utility in scenarios demanding high data throughput, such as real-time video streaming or extensive sensor networks [3,47,48,49]. A standout solution to this bandwidth limitation is the integration of orthogonal frequency division multiplexing (OFDM) with subcarrier power modulation (SPM) [50]. This innovative two-dimensional modulation technique combines differential phase shift keying (DPSK) with subcarrier power modulation, effectively doubling the data transmission rate within the same bandwidth. At the receiver end, specialized equalizers are employed to mitigate channel variations, spreading loss, and multipath fading, thereby substantially enhancing throughput and reducing the bit error rate (BER). MATLAB (R2024b) simulations and laboratory experiments have confirmed the effectiveness of the OFDM-SPM system, underscoring its potential to surpass the limitations of traditional underwater acoustic communication systems [50]. In conclusion, while underwater acoustic communication remains indispensable for long-range marine applications, it continues to face persistent challenges like high noise levels, bandwidth limitations, and multipath interference. Recent advancements in denoising techniques, spanning from conventional signal processing methods to cutting-edge deep learning approaches, coupled with advanced modulation schemes such as OFDM-SPM, are driving the development of more robust and efficient underwater communication systems.Looking to the future, research directions emphasize the synergistic integration of noise reduction, multipath mitigation, and multimodal communication strategies that combine acoustic, optical, and RF technologies. The ultimate goal is to achieve higher reliability, greater data rates, and broader applicability in the intricate and demanding underwater environment.
In summary, traditional acoustic systems were constrained by high latency, narrow bandwidth, and noise sensitivity. Recent advances, such as OFDM-SPM modulation [50], GAN-based denoising [4,32,33], and adaptive equalizers [45], have demonstrably mitigated these issues, achieving up to 2 times higher data rates and significantly lower bit error rates in experimental settings.
2.2. Underwater RF Communication
Underwater RF communication has lately surfaced as a captivating substitute for conventional underwater acoustic communication systems, mainly attributed to its capacity to facilitate higher data transmission rates. In contrast to the low bandwidth and high latency that usually restrict underwater acoustic waves, RF communication distinguishes itself by its ability to support considerably faster data rates. This makes it extremely appropriate for high-bandwidth applications such as real-time video streaming, large-scale sensor networks, and remote monitoring of underwater environments. RF communication transmits information via electromagnetic waves that can propagate through water. While the propagation of electromagnetic waves shares similarities with the way radio waves propagate in the air, there are notable differences in range and performance due to the inherent properties of water.
Among the many advantages of RF communication in underwater settings, its capacity for high data rates stands out. RF signals can transmit large amounts of data at a much faster speed than underwater acoustic signals. This is essential for applications that need quick transmission of high-resolution data, like underwater imaging, sonar data, and environmental monitoring. What’s more, RF communication is especially effective in shallow water. In such scenarios, signal attenuation is not as serious as long distance communication [51]. So, it can ensure better signal clarity and faster data transfer over short to medium distances. Also, RF communication systems have an edge in hardware configuration. The antennas needed for RF communication at higher frequencies are usually smaller than those for acoustic communication. This brings more flexibility in system design, which is highly valued for mobile underwater devices such as Autonomous Underwater Vehicles (AUVs) [11]. To better understand how RF communication compares with other underwater communication techniques in key performance metrics, Table 3 summarizes several typical communication modalities. As shown in the table, each method exhibits trade-offs between data rate, range, and hardware complexity, which must be carefully considered for specific underwater applications.
Table 3.
Electromagnetic Wave Bands for Underwater Communication in Seawater.
Undoubtedly, underwater RF communication has its limitations, mainly attributable to seawater’s high conductivity, which in turn causes speedy signal attenuation. Compared to acoustic signals, RF signals experience far greater attenuation when travelling through water, especially in high-frequency bands, thus posing challenges for long-distance transmission. The significant loss of RF signal strength during underwater propagation confines RF communication to relatively shallow settings. For example, in seawater, the range of RF signals is often just a few meters, whereas acoustic communication can cover hundreds or even thousands of meters. What’s more, low-frequency RF communication demands large, cumbersome antennas. This creates difficulties for miniaturization and integration into compact underwater systems, as cited in [52,53]. In addition to attenuation, complex environmental factors like salinity, temperature fluctuations, and turbulence further undermine RF communication performance. These factors bring about changes in RF signal propagation, making it arduous to sustain stable links in dynamic underwater conditions. Simultaneously, multipath propagation effects, where RF signals reflect off the seafloor or underwater objects, can trigger signal interference and distortion. This results in heightened error rates and less reliable communication [53,54].
To surmount these limitations, numerous optimization strategies have been proposed for underwater RF communication. A critical research focus involves developing more precise channel models capable of accounting for the frequency-selective attenuation and the dynamic nature of the underwater environment. These models are essential for comprehending RF signal behavior under varying conditions such as water salinity and temperature, and for designing adaptive systems [11,54]. Moreover, multicarrier modulation techniques like OFDM can alleviate multipath propagation effects and enhance data rates by splitting the signal into multiple subcarriers for simultaneous transmission [55].
In terms of hardware improvements, advancements in miniaturized, low-power antennas and transceivers are addressing the size and energy constraints of underwater systems, particularly for AUVs and small underwater robots [11,53]. Pavan et al. [56] recommend a multi-layer clustered network design that boosts data throughput and cuts energy use via multi-hop transmission. Che et al. [57] suggests integrating RF with optical and acoustic technologies to form multimodal systems, overcoming RF’s range limitations. These hybrid networks can support real-time video transmission, complementing RF’s short-range capabilities [58].
Overall, although RF communication has certain limitations in deep-sea or high-conductivity settings, it is still a valuable approach for high-speed, short-range applications in shallow waters. Future research should center on three main directions. First, expanding RF communication applications in freshwater and shallow water scenarios. This includes both theoretical exploration and practical application research, aiming to fully leverage the high data rate advantages of RF communication in these environments. Second, improving channel models and hardware design. More accurate channel models can help us better understand the propagation characteristics of RF signals in water, while optimized hardware design can enhance the performance and reliability of communication systems. Third, integrating RF systems with optical and acoustic technologies in multimodal networks, which can combine the strengths of different communication methods to achieve more efficient and reliable underwater communication. These improvements can help tackle challenges in marine exploration, environmental monitoring, and disaster early-warning systems [11,54].
2.3. Underwater Wireless Optical Communication
Underwater Wireless Optical Communication (UWOC) has recently garnered significant attention for its ability to facilitate high-speed, low-latency, and high-bandwidth underwater communication. Operating within the blue–green light spectrum (450–550 nm), UWOC overcomes the limitations of traditional acoustic and radiofrequency methods. This makes it particularly suitable for applications such as oceanographic research, underwater monitoring, and marine resource exploration [59,60]. Unlike acoustic signals, which are hindered by long propagation delays and low data rates, or radiofrequency signals, which suffer from severe attenuation in water, UWOC offers a high-performance and energy-efficient solution, especially for short—to medium—range communication [61].
The core of UWOC technology lies in its use of laser diodes (LDs) or light-emitting diodes (LEDs) as transmitters, coupled with advanced modulation techniques. These techniques include OFDM, Non-Return to Zero On-Off Keying (NRZ-OOK), and Optical Code Division Multiple Access (OCDMA), all of which are designed to boost data throughput, efficiency, and system robustness [61,62]. LDs, with their high energy concentration and modulation bandwidth, are ideal for long-distance and high-speed communication scenarios [63,64]. LEDs, on the other hand, with their broad beam dispersion and cost advantages, are better suited for short-range or broadcast applications where link alignment is less critical [65,66]. These characteristics endow UWOC systems with remarkable versatility, enabling them to meet the diverse needs of underwater sensor networks, AUVs, and real-time monitoring systems [59,63].
Recent advancements in UWOC systems have demonstrated their potential for high-speed data transmission across different distances. One study developed a UWOC system using a 450-nm laser diode paired with a silicon avalanche photodetector. At 80 mA and with 51.3 mW optical power and a 1 GHz modulation bandwidth, the system achieved data rates of 2 Gbps over 12 m and 1.5 Gbps over 20 m, maintaining BER within forward error correction (FEC) limits. This highlights its suitability for high-speed, short-range applications [67]. Another system, utilizing a 520-nm green laser diode with NRZ-OOK modulation, reached 2.70 Gbps over 34.5 m, along with 4.60 Gbps at 2.3 m and 3.48 Gbps at 20.7 m. Predictions indicate potential for 0.15 Gbps at 90.7 m and 1 Gbps at 62.7 m, suggesting its capability for long-distance, real-time UWOC applications [62].
Optical OFDM has also seen progress, with a 405-nm OFDM signal transmitted via FPGA achieving 1.45 Gbps over 4.8 m with BER within FEC limits [61]. This implies that further optimization could enhance transmission distance and system resilience in complex underwater conditions. A mid-range application study showcased a system with a 520-nm laser diode and NRZ-OOK modulation, achieving 500 Mbps over 100 m with BER below FEC thresholds. Using reflective mirrors in a 10-m water tank, predictions suggested communication ranges of 146 m at 500 Mbps and 174 m at 100 Mbps, demonstrating the system’s feasibility for practical long range deployment [63].
Additionally, coherent detection techniques have been proven effective for robust high-speed UWOC under challenging conditions. An experimental demonstration of an 8-Gbps quadrature-phase-shift-keying (QPSK) system using a 532-nm signal and coherent heterodyne detection showcased superior performance under scattering environments, achieving low BERs even in high-scatter conditions. This approach highlights the potential of phase modulation and coherent detection in achieving high data rates with enhanced system reliability [64].
Despite these advancements, UWOC systems face challenges from light absorption, scattering, and underwater turbulence, which degrade performance. Environmental factors such as salinity, temperature variations, and particulates significantly impact signal quality. Absorption and scattering are caused by the interaction of photons with particles in water, where absorption is caused by the transfer of energy by photons to other particles, and scattering is caused by the collision of photons with other particles. Generally, the attenuation coefficient can be used to describe the attenuation of light in water and be expressed as
where and represent the absorption coefficient and scattering coefficient with the unit of respectively, and indicates that the attenuation coefficient is related to the wavelength. The value of the attenuation coefficient will vary with the type and depth of water [9]. Typical values of absorption coefficient, scattering coefficient and attenuation coefficient related to the four main water types [68] are as shown in Table 4.
Table 4.
Typical , , and for different water types.
To address these, research has focused on developing robust channel models, turbulence compensation techniques, and system integration approaches such as multi-input multi-output (MIMO) and adaptive optics [65,66]. Techniques such as RGB wavelength division multiplexing (WDM) combine illumination and communication functionalities, while FPGA-based QAM-OFDM systems improve BER and extend transmission distances [63,66]. Moreover, experimental setups have demonstrated the effects of underwater turbulence on communication performance, leading to the development of new mitigation strategies, such as spatial diversity and aperture averaging, to counteract signal degradation [65,67]. Conventional UWOC systems based on LED/LD and NRZ-OOK modulation typically achieve 100 Mbps to 1 Gbps over clear-water distances up to 20–30 m. However, they suffer from rapid attenuation and poor performance in turbid conditions.Research innovations such as QPSK coherent detection [64], wavelength division multiplexing, and turbulence-aware adaptive optics [63,66] now enable stable Gbps-level links even under moderate scattering. The performance evolution is summarized in Table 5.
Table 5.
Summary of recent UWOC works.
Different communication modes have their own advantages and disadvantages, and a single communication mode cannot completely cover a variety of working conditions, Table 6 shows the characteristic of different methods. Presently, UWOC has started integrating with other communication technologies such as acoustic and RF systems. This integration significantly enhances its utility by enabling hybrid underwater networks that leverage the unique advantages of each method. These advancements position UWOC as a transformative technology for constructing scalable, high-speed underwater communication networks capable of supporting critical applications in environmental monitoring, deep-sea exploration, and military operations. Moving forward, future research will continue to address the challenges posed by underwater environments. It will focus on enhancing system efficiency, extending communication distances, and optimizing performance under dynamic conditions.
Table 6.
Comparison of Underwater Communication Methods.
2.4. Alternative Underwater Communication Technologies
In addition to the aforementioned communication methods, several novel approaches are emerging for underwater communication systems. One such innovative method is underwater electric field communication, which leverages the unique properties of electric fields for signal transmission. This approach demonstrates significant potential, particularly in complex underwater environments where traditional methods may face substantial challenges. Traditional underwater communication methods, including acoustic, optical, and RF communication, each offer distinct advantages while being subject to specific limitations. Acoustic communication, although effective for long-distance transmission, suffers from high latency, multipath propagation, and Doppler shifts. Optical communication enables high-speed data transfer in clear water conditions but is highly sensitive to water quality and particulate matter. RF communication, due to the high attenuation of high-frequency signals in water, is predominantly restricted to short-range applications [78]. These limitations underscore the need for a diverse portfolio of communication strategies to address the unique demands of various underwater scenarios.
Electric field communication draws inspiration from the biological mechanisms of weakly electric fish, such as the electric eel. These organisms emit electric fields and sense changes in their environment for communication and navigation. This biological principle has been adapted for data transmission among underwater robots, offering advantages such as low power consumption, compact size, and strong adaptability to complex underwater conditions. It ensures stable communication even in murky waters [79]. Figure 3 shows the basic experimental design of underwater electric field communication system.
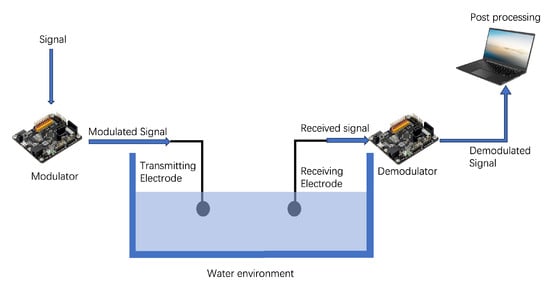
Figure 3.
Experimental design of underwater electric field communication system.
One notable example of an underwater electric field communication system is the Bio-inspired Electrocommunication System (BECS) and its upgraded version [78], BECS-II. The initial BECS achieved a communication speed of 1.2 kbps over a 3-m range, making it suitable for small robot swarms BECS-II [79], however, employs a dual-frequency design, achieving a speed of 20 kbps in high-frequency mode and extending the range to 20 m in low-frequency mode. This significant improvement in speed and distance allows it to meet the demands of multitasking applications.
Another innovative approach involves a triboelectric nanogenerator (TENG)-based electric field communication system, which generates electric field signals via Maxwell’s displacement current [13]. This system has demonstrated robust anti-interference capabilities and stable signal transmission over a 100-m-long water pipe. TENGs represent a novel mechanism for underwater communication through the generation of displacement current signals, which can be modulated and detected over conductive media. Their key advantage lies in self-powered operation, making them suitable for long-duration, maintenance-free deployment in remote environments. However, practical limitations currently constrain their widespread use.
Firstly, signal bandwidth is inherently narrow, as the TENG’s output is highly dependent on mechanical actuation frequency and material pairing. This restricts achievable data rates. Secondly, modulation schemes remain relatively rudimentary, often relying on ON-OFF keying or mechanical triggering, which lacks robustness under variable hydrodynamic conditions. Finally, system integration with standard underwater communication infrastructure is still in its infancy, as the generated signals differ from conventional acoustic or electromagnetic waveforms. Despite these challenges, the low energy requirement, stealth properties, and potential compatibility with bio-inspired sensors make TENGs a promising direction for future research, particularly in passive communication networks and environmentally constrained scenarios.
In conclusion, research on underwater electric field communication highlights its unique advantages in short-range, high-reliability scenarios. It is expected to become an important supplementary method for underwater communication, with applications in robot collaboration, environmental monitoring, and underwater exploration.
2.5. Comparison Between Commercial Systems and Research Prototypes
To better understand the evolution of underwater wireless communication technologies, it is important to compare commercially available systems with recent academic research prototypes. Table 7 summarizes representative systems across acoustic, RF, and optical modalities, highlighting their key performance metrics and typical use cases.
Table 7.
Comparison between commercially available systems and research prototypes.
As shown in table, commercial systems emphasize field robustness and energy efficiency, while research systems focus on pushing data rates, intelligent control, or experimental mechanisms. Bridging the gap between innovation and deployment remains a key challenge and direction for future work.
3. Wireless Communication System Applied in Underwater Devices
As underwater missions grow in complexity and sophistication, communication systems have become pivotal in enhancing the performance of various underwater devices. These devices increasingly rely on reliable and efficient communication technologies to accomplish their tasks effectively. This section offers a comprehensive review of wireless communication technologies applied to underwater systems, organized into two key parts. First, it provides an overview of current mainstream communication methods and discusses their applicability and challenges across different types of underwater devices. Acoustic communication remains a cornerstone due to its long-range capabilities despite limitations like low data rates and high latency. Optical communication offers high-speed data transfer in clear water but faces significant attenuation in turbid environments. RF communication, while effective for short-range applications, suffers from high attenuation in seawater. More recently, underwater electric field communication has emerged as a promising alternative, offering advantages such as low power consumption and reliability in short-range and complex environments. Second, the section delves into recent advances involving the integration of multiple communication technologies. By combining these methods, researchers aim to leverage the strengths of each while mitigating their individual weaknesses. Additionally, the application of machine learning (ML) techniques is explored, showing potential in optimizing communication protocols and improving reliability. Cross-medium communication strategies are also discussed, highlighting efforts to bridge underwater systems with surface and airborne platforms. These innovations collectively pave the way for more robust and versatile underwater communication systems that can adapt to diverse mission requirements and environmental conditions. This review aims to provide a holistic understanding of the current state and future directions of underwater communication technologies, emphasizing their critical role in advancing underwater exploration and operations.
3.1. Application and Limitations of Single Mode Underwater Communication Technology
The evolution of submersibles exemplifies the convergence of various technological fields. With advancements in materials science, control algorithms, and related innovations, submersibles have transformed from traditional, large-scale, manned, propeller-driven vehicles into compact, unmanned bionic platforms [81]. These next-generation underwater machines are increasingly capable of handling complex tasks such as resource exploration, environmental monitoring, and cooperative operations with clusters of AUVs. However, the reliance on single mode underwater communication technologies, particularly traditional acoustic systems, is encountering significant limitations [82]. These systems struggle to meet modern requirements for high data transmission rates, low power consumption, and enhanced communication security, highlighting the urgent need for more advanced and diversified communication solutions.
Among single-mode technologies, optical wireless communication has attracted considerable attention for its potential to achieve high-speed underwater links. For instance, ref. [74] investigates both simulation and experimental results of optical communication strategies for AUVs. The study models underwater light propagation using Lambert’s law, incorporating water absorption and scattering coefficients to predict received optical power distribution. Channel capacity is evaluated via the Shannon-Hartley theorem, revealing that water turbidity critically limits transmission performance. Although increasing light source power extends communication distance, the improvement is marginal in turbid waters. The authors suggest future research directions including the use of non-ideal light source models and the design of multi-directional receivers to enhance the robustness and adaptability of optical wireless systems in underwater environments.
Meanwhile, Jiang et al. [83] presents a low-complexity acoustic coherent communication system specifically designed for small AUVs, addressing typical limitations associated with underwater acoustic channels. Through differential binary phase-shift keying (DBPSK) modulation and a direct delay-tuning Doppler compensation scheme, the system achieves reduced computational burden, improving real-time communication performance. The incorporation of a least-mean-square (LMS) adaptive equalizer effectively mitigates multipath interference, a common issue in single-mode acoustic links. Simulations and field experiments conducted under varying conditions validate the system’s ability to achieve low bit error rates and maintain reliable communication performance in challenging underwater environments.
When integrating underwater wireless communication systems into AUVs, practical considerations such as transceiver size, energy consumption, heat dissipation, and antenna alignment become critical. For instance, low-frequency RF systems typically require large antennas, which are unsuitable for compact or biomimetic AUVs. Similarly, optical systems often demand precise pointing and alignment, which imposes mechanical constraints on maneuverable vehicles. Power consumption is another limiting factor—high-speed optical or active acoustic systems can drain onboard batteries rapidly, reducing operational time. To address this, ongoing research focuses on duty-cycled communication, ultra-low-power modulation protocols, and lightweight, modular transceivers that balance performance with AUV mobility.
Beyond general-purpose communication, certain applications demand specialized designs. For environmental monitoring in ecologically sensitive zones, communication systems must minimize acoustic and electromagnetic disturbances. Low-power optical systems operating in the blue-green spectrum and biodegradable sensor nodes have been proposed to ensure minimal environmental impact. In parallel, stealth applications require low-emission communication methods. Electric field communication, inspired by weakly electric fish, has shown promise in short-range, low-detectability scenarios. Additionally, ongoing work on quantum-secured optical channels and covert acoustic protocols represents a new frontier for secure and invisible underwater data exchange.
Overall, while single-mode underwater communication technologies such as acoustic and optical methods offer distinct advantages, their respective limitations in terms of transmission range, data rate, robustness, and adaptability underscore the necessity for future systems to explore hybrid or multi-modal solutions.
3.2. Development and Applications of Multimodal Underwater Communication
To address the inherent limitations of single-mode underwater communication technologies, recent research has shifted toward the development of multimodal communication architectures that integrate acoustic, optical, RF methods. This hybrid strategy aims to exploit the complementary strengths of different communication modes: the long range of acoustic signals, the high data rates of optical links, and the versatility of RF communication in shallow and freshwater environments [82]. Such integration is particularly critical for AUVs, enabling reliable long-range communication, real-time high-speed data transfer, and minimized latency for mission-critical operations.
Several practical implementations have demonstrated the benefits of multimodal systems. For instance, hybrid acoustic-optical networks have been proposed for underwater sensor networks, utilizing acoustic links for control signaling and optical links for high-volume data transmission [84]. In shallow water environments, RF communication has been effectively incorporated into Internet of Underwater Things (IoUT) frameworks to establish short-range, low-power communication links between underwater sensors and gateways [85]. Cross-medium communication strategies have also been explored, enabling underwater devices to dynamically switch between acoustic, optical, and RF modes based on environmental conditions and mission requirements [86].
Multimodal systems integrate two or more communication technologies—typically acoustic, optical, and RF—to leverage their complementary strengths. For example, acoustic links offer long-range coverage for basic control messages, while optical or RF links can be activated for high-speed data bursts when conditions allow.
One notable implementation is a hybrid acoustic-optical system for AUV clusters, where low-rate acoustic beacons ensure global coordination, and optical modems are selectively engaged for localized high-volume data exchange.
Recent studies also propose dynamic switching mechanisms that adjust communication mode based on real-time measurements of turbidity, salinity, or energy availability [85,86]. For instance, DRL-based frameworks can autonomously select the optimal modality to minimize latency and maximize link quality.
Despite their promise, multimodal systems face challenges in hardware complexity, synchronization across channels, and seamless protocol switching. Ongoing efforts aim to address these via unified communication stacks and embedded sensor fusion platforms.
And also, hybrid communication systems face significant challenges in actual underwater settings. First, the physical integration of acoustic, optical, and RF transceivers increases payload weight, form factor, and thermal load—especially problematic for micro-AUVs or swarming robots.
Second, seamless cross-modality coordination requires reliable environmental sensing and low-latency switching algorithms, which are often hindered by unpredictable underwater dynamics.
Third, power consumption across heterogeneous modules is difficult to optimize holistically. Activating multiple high-speed links may rapidly deplete onboard energy reserves.
Finally, the lack of standardized multimodal protocol stacks makes it difficult to ensure interoperability between platforms developed by different manufacturers or research groups. Addressing these limitations is an active area of research, with promising solutions emerging in the form of modular AI-assisted control layers, energy-aware scheduling, and open-source hardware frameworks for flexible hybrid integration.
In addition to communication integration, ML algorithms are being increasingly adopted to enhance the adaptability and robustness of underwater communication systems [83]. ML techniques enable adaptive signal processing, dynamic resource allocation, and interference mitigation under varying channel conditions. These advancements are complemented by innovations in localization technologies, such as GPS-denied acoustic positioning and vision-based navigation, which improve the coordination and operation of underwater platforms.
The growing development of the IoUT further underscores the demand for scalable, flexible, and energy-efficient communication systems [87,88]. IoUT networks must support large numbers of heterogeneous devices, including AUVs, fixed sensors, and surface platforms, requiring flexible communication architectures capable of integrating acoustic, optical, and RF links [89]. Additionally, energy harvesting techniques, such as TENGs and microbial fuel cells, are being explored to extend the operational life of underwater nodes in remote deployments.
In summary, overcoming the limitations of single-mode communication requires not only the development of multimodal communication systems but also the integration of intelligent adaptive algorithms and cross-medium communication strategies. These innovations will be pivotal in enabling reliable, high-speed, and energy-efficient underwater networks for future marine exploration and environmental monitoring applications.
4. Future Trends
The evolution of underwater wireless communication systems has been marked by significant progress and ongoing challenges. As we look to the future, the development of these systems will center on three key directions: technological innovation and system integration, intelligent and sustainable development, and the exploration of emerging application domains. These advancements are geared toward overcoming existing limitations and promoting all-around progress in marine exploration and resource utilization. Technological innovation will focus on developing new materials and devices to improve communication performance, while system integration will aim to combine different communication technologies to achieve more efficient and reliable underwater communication. Intelligent development will involve the application of artificial intelligence and ML to optimize communication protocols and enhance system adaptability. Sustainable development will emphasize energy efficiency and environmental friendliness. The exploration of emerging application domains will drive the expansion of underwater wireless communication into new fields such as smart oceans, underwater IoT, and deep sea resource development.
4.1. Technological Innovation and System Integration
Future underwater communication systems will transition from reliance on single-technology solutions to multi-modal collaborative networks that synergize acoustic, optical, and RF technologies. For instance, hybrid acoustic-optical systems can leverage the long-range capabilities of acoustic communication for command transmission in deep-sea environments while exploiting optical channels for high-bandwidth data streaming. RF communication, though limited by high attenuation in seawater, remains critical for short-range, high-speed data exchange in freshwater or shallow turbid zones. Recent breakthroughs, such as OFDM-SPM modulation, have doubled acoustic data rates by combining DPSK with subcarrier power modulation, highlighting the potential of signal processing innovations. Emerging technologies like quantum communication are poised to redefine underwater security paradigms. Quantum key distribution (QKD) using blue-green wavelengths could enable ultra-secure links resistant to eavesdropping. While turbulence and scattering pose challenges, advancements in single-photon detectors and adaptive optics may soon extend quantum communication ranges to 50–100 m. Hardware advancements will further accelerate progress. Wide-bandgap semiconductors like GaN-based laser diodes enhance optical transmission efficiency, while bio-inspired systems like BECS-II achieve 20 kbps data rates over 20 m using dual-frequency electric field communication, ideal for low-power robotic swarms. Innovations such as TENGs demonstrate self-powered signal transmission via Maxwell’s displacement currents, enabling energy-autonomous sensor networks in complex environments.
As cybersecurity concerns grow in critical maritime infrastructures, QKD has emerged as a potential enabler for unbreakable underwater communication links. The use of blue-green laser wavelengths makes QKD physically viable in low-scattering water columns. Experimental setups have demonstrated secure key exchange at distances up to 20–50 m in clear water using coherent phase-based or polarization-based protocols.
However, practical deployment is still hindered by environmental challenges such as turbulence-induced decoherence, limited photon budgets, and alignment sensitivity.
In the near term, stationary or semi-fixed QKD nodes in harbors, research stations, or underwater sensor grids may become feasible, especially for high-security but low-throughput applications. The integration of adaptive optics, single-photon avalanche diodes, and quantum-compatible underwater transceivers will be key enablers.
Ultimately, widespread adoption of QKD in mobile underwater networks depends on both hardware miniaturization and protocol adaptation for unstable and lossy aquatic quantum channels—an exciting but long-term research endeavor.
4.2. Intelligent and Sustainable Development
Artificial intelligence and ML will play a transformative role in addressing dynamic underwater challenges. Deep reinforcement learning (DRL) could empower AUVs to dynamically select communication modes based on real-time environmental parameters such as turbidity, salinity. GANs and attention-based models, already proven effective in denoising acoustic signals, may evolve into real-time turbulence compensation tools for optical systems. Federated learning frameworks could further optimize collaborative decision-making in AUV clusters while minimizing energy consumption. Sustainability will drive the design of eco-adaptive technologies. Salinity- and pressure-resistant optical transceivers, biodegradable sensor nodes, and energy-harvesting systems like ocean thermal gradient converters will reduce the environmental footprint of underwater infrastructure. Orbital angular momentum (OAM) multiplexing shows promise for stabilizing optical signals in polluted waters, while bio-inspired electric field communication mimics weakly electric fish to ensure robust short-range links in murky environments. Standardization efforts, including unified modulation protocols and blockchain-based authentication, will enhance interoperability and cybersecurity in heterogeneous networks.
Recent efforts have translated AI-based methods from simulations into real deployments. For example, Zhou et al. [34] demonstrated a real-time GAN-based denoising system on an autonomous surface vehicle operating in the East China Sea, successfully improving the signal-to-noise ratio by over 8 dB in high-bioactivity zones.
In another instance, the DRL-based adaptive protocol in the iLab-MarineNet framework allows a fleet of AUVs to switch between acoustic and optical links in real-time, guided by salinity and turbidity sensors. This has led to a 40% reduction in average latency across mission-critical segments [90].
Additionally, federated learning has been applied in the DeepOceanSense platform to optimize acoustic equalization models across distributed nodes without centralized retraining, significantly lowering communication overhead and improving robustness.
4.3. Expansion into Emerging Applications
Underwater wireless communication technologies are breaking free from traditional marine exploration roles, enabling transformative applications across diverse fields. Distributed sensor networks with hybrid acoustic-optical capabilities now support real-time monitoring of ocean acidification and methane hydrate stability, critical for climate modeling and policy interventions. In disaster scenarios, low-latency optical-AUV systems enhance rapid response to submarine earthquakes or oil spills, leveraging high-speed data links for emergency coordination. Biomimetic robotics is revolutionizing ecosystem restoration, with bio-inspired electric field communication systems mimicking electric fish to coordinate artificial swarms for coral reef repair or infrastructure inspection. Military and resource security benefit from quantum-secured optical channels and covert acoustic protocols, safeguarding underwater mining and strategic operations in contested zones. Meanwhile, satellite-integrated networks bridge oceanic data gaps, enabling global applications from anti-illegal fishing to biodiversity mapping. These advancements not only redefine humanity’s interaction with the oceans but also drive innovations at the intersection of robotics, environmental science, and cybersecurity.
5. Conclusions
The rapid advancements in underwater wireless communication technologies are key to addressing the increasing demands of marine research, environmental monitoring, and underwater resource exploitation. This paper has reviewed the three primary communication methods—underwater acoustic communication, RF communication, and UWOC—each offering distinct advantages and limitations. Underwater acoustic communication, despite its long-range capabilities, struggles with noise interference and low data rates, especially in deeper and more complex marine environments. RF communication excels in short-range, high-speed applications but is severely impacted by seawater’s high conductivity, limiting its use in deep or high-conductivity environments. UWOC offers high data rates and low latency, making it a promising technology for medium-range communication, though it is still affected by challenges such as light attenuation and water turbidity.
Recent innovations, such as hybrid communication systems combining acoustic, optical, and RF technologies, have shown great potential for overcoming the limitations of individual methods. Additionally, bio-inspired communication techniques, including underwater electric field communication, are emerging as low-power, robust solutions, particularly in murky water conditions. These hybrid systems and bio-inspired methods are paving the way for more reliable, high-speed underwater communication networks.
The future of underwater communication systems will likely focus on the integration of multiple communication technologies and the development of intelligent algorithms to dynamically select the most appropriate communication mode based on real-time environmental conditions. Furthermore, advancements in energy-efficient designs and sustainable technologies, such as energy harvesting from underwater currents, will be crucial for supporting long-term, autonomous operations of underwater devices. The continued evolution of these technologies will enable breakthroughs in marine ecosystem monitoring, deep-sea exploration, and disaster response.
As underwater wireless communication systems continue to advance, the integration of ML, artificial intelligence, and adaptive algorithms will play an essential role in improving system performance, optimizing resource allocation, and ensuring sustainable operation. Ultimately, these innovations will help revolutionize the way we explore and interact with the ocean, fostering global marine stewardship and facilitating technological advancements in the field of underwater communication.
Author Contributions
Conceptualization, K.S. and Z.L.; investigation, Z.L.; resources, W.L.; data curation, Z.L.; writing—original draft preparation, Z.L. and K.S.; writing—review and editing, W.C., D.F. and W.L.; visualization, Z.L.; supervision, W.L. and W.C.; project administration, W.C. and D.F.; funding acquisition, W.L., W.C. and D.F. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Scientific Research Funding Project of Westlake University, grant number WU2024A001 and the Young Scientists Fund of the National Natural Science Foundation of China (No. 52401393).
Acknowledgments
The funding is donated by Li Duozhu, the president of Dingheng Shipping Technology Co., Ltd.
Conflicts of Interest
The authors declare no conflicts of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
Abbreviations
| No. | Abbreviation | Full Name |
| 1 | AUV | Autonomous Underwater Vehicle |
| 2 | BECS | Bio-inspired Electrocommunication System |
| 3 | BER | Bit Error Rate |
| 4 | CNN | Convolutional Neural Networks |
| 5 | DBPSK | Differential Binary Phase-Shift Keying |
| 6 | DL | Deep Learning |
| 7 | DPSK | Differential Phase Shift Keying |
| 8 | DRL | Deep Reinforcement Learning |
| 9 | EMD | Empirical Mode Decomposition |
| 10 | FEC | Forward Error Correction |
| 11 | GAN | General Adversarial Network |
| 12 | IoUT | Internet of Underwater Things |
| 13 | LD | Laser Diode |
| 14 | LED | Light-Emitting Diodes |
| 15 | LMS | Least-Mean-Square |
| 16 | MIMO | Multi-Input Multi-Output |
| 17 | ML | Machine Learning |
| 18 | NRZ-OOK | Non-Return to Zero On-Off Keying |
| 19 | OCDMA | Optical Code Division Multiple Access |
| 20 | OFDM | Orthogonal Frequency Division Multiplexing |
| 21 | OAM | Orbital Angular Momentum |
| 22 | QKD | Quantum Key Distribution |
| 23 | QPSK | Quadrature Phase-Shift Keying |
| 24 | RF | Radio Frequency |
| 25 | RNN | Recurrent Neural Networks |
| 26 | SPM | Subcarrier Power Modulation |
| 27 | TENG | Triboelectric Nanogenerator |
| 28 | UWOC | Underwater Wireless Optical Communication |
| 29 | VMD | Variational Mode Decomposition |
| 30 | WDM | Wavelength Division Multiplexing |
References
- Liu, F.; Li, G.; Yang, H. Application of multi-algorithm mixed feature extraction model in underwater acoustic signal. Ocean Eng. 2024, 296, 116959. [Google Scholar] [CrossRef]
- Yang, H.; Cheng, Y.; Li, G. A denoising method for ship radiated noise based on Spearman variational mode decomposition, spatial-dependence recurrence sample entropy, improved wavelet threshold denoising, and Savitzky-Golay filter. Alex. Eng. J. 2021, 60, 3379–3400. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, B.; Zhang, Y.; Li, J.; Wu, C. Convolutional neural network based filter bank multicarrier system for underwater acoustic communications. Appl. Acoust. 2021, 177, 107920. [Google Scholar] [CrossRef]
- Song, Y.; Liu, F.; Shen, T. A novel noise reduction technique for underwater acoustic signals based on dual-path recurrent neural network. IET Commun. 2023, 17, 135–144. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Li, G.; Bu, W.; Yang, H. Noise reduction method for ship radiated noise signal based on modified uniform phase empirical mode decomposition. Measurement 2024, 227, 114193. [Google Scholar] [CrossRef]
- Zhou, A.; Li, X.; Zhang, W.; Zhao, C.; Ren, K.; Ma, Y.; Song, J. An attention-based multi-scale convolution network for intelligent underwater acoustic signal recognition. Ocean Eng. 2023, 287, 115784. [Google Scholar] [CrossRef]
- Yang, S.; Jin, A.; Zeng, X.; Wang, H.; Hong, X.; Lei, M. Underwater acoustic target recognition based on sub-band concatenated Mel spectrogram and multidomain attention mechanism. Eng. Appl. Artif. Intell. 2024, 133, 107983. [Google Scholar] [CrossRef]
- Zhu, S.; Chen, X.; Liu, X.; Zhang, G.; Tian, P. Recent progress in and perspectives of underwater wireless optical communication. Prog. Quantum Electron. 2020, 73, 100274. [Google Scholar] [CrossRef]
- Tian, B.; Zhao, L.; Chen, B.; Wu, M.; Zheng, H.; Vasisht, D.; Yan, F.Y.; Nahrstedt, K. AquaScope: Reliable Underwater Image Transmission on Mobile Devices. arXiv 2025, arXiv:2502.10891. [Google Scholar]
- Ali, M.; Jayakody, D.N.; Chursin, Y.; Affes, S.; Dmitry, S. Recent Advances and Future Directions on Underwater Wireless Communications. Arch. Comput. Methods Eng. 2019, 26, 1–34. [Google Scholar] [CrossRef]
- Esmaiel, H.; Sun, H. Underwater Wireless Communications. Sensors 2024, 24, 7075. [Google Scholar] [CrossRef]
- Zhao, H.; Xu, M.; Shu, M.; An, J.; Ding, W.; Liu, X.; Wang, S.; Zhao, C.; Yu, H.; Wang, H.; et al. Underwater wireless communication via TENG-generated Maxwell’s displacement current. Nat. Commun. 2022, 13, 3325. [Google Scholar] [CrossRef]
- Li, Y.X.; Wang, L. A novel noise reduction technique for underwater acoustic signals based on complete ensemble empirical mode decomposition with adaptive noise, minimum mean square variance criterion and least mean square adaptive filter. Def. Technol. 2020, 16, 543–554. [Google Scholar] [CrossRef]
- Yang, H.; Li, L.; Li, G. A new denoising method for underwater acoustic signal. IEEE Access 2020, 8, 201874–201888. [Google Scholar] [CrossRef]
- Hu, H.; Zhang, L.; Yan, H.; Bai, Y.; Wang, P. Denoising and baseline drift removal method of MEMS hydrophone signal based on VMD and wavelet threshold processing. IEEE Access 2019, 7, 59913–59922. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, S.; Ma, Z.; Gao, G.; Guo, Y.J.; Zhang, F.; Huang, S.; Zhang, J. Long-Term and Real-Time High-Speed Underwater Wireless Optical Communications in Deep Sea. IEEE Commun. Mag. 2023, 62, 96–101. [Google Scholar] [CrossRef]
- Rahman, Z.; Zafaruddin, S.M.; Chaubey, V.K. Direct Air-to-Underwater Optical Wireless Communication: Statistical Characterization and Outage Performance. IEEE Trans. Veh. Technol. 2022, 72, 2655–2660. [Google Scholar] [CrossRef]
- Urick, R.J. Principles of Underwater Sound, 3rd ed.; Peninsula Publishing: Newport Beach, CA, USA, 1983. [Google Scholar]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Singer, A.C.; Andrew, C.; Nelson, J.; Jill, K.; Kozat, S. Signal Processing for Underwater Acoustic Communications. IEEE Commun. Mag. 2009, 47, 90–96. [Google Scholar] [CrossRef]
- Jiang, J.; Wu, Z.; Lu, J.; Huang, M.; Xiao, Z. Interpretable features for underwater acoustic target recognition. Measurement 2020, 173, 108586. [Google Scholar] [CrossRef]
- Middleton, D. Channel Modeling and Threshold Signal Processing in Underwater Acoustics: An Analytical Overview. IEEE J. Ocean. Eng. 1987, 12, 4–28. [Google Scholar] [CrossRef]
- Wenz, G.M. Review of Underwater Acoustics Research: Noise. J. Acoust. Soc. Am. 1972, 51, 1010–1024. [Google Scholar] [CrossRef]
- Raj, K.M.; Murugan, S.S.; Natarajan, V.; Radha, S. Denoising algorithm using wavelet for underwater signal affected by wind driven ambient noise. In Proceedings of the IEEE-International Conference on Recent Trends in Information Technology, ICRTIT 2011, Chennai, India, 3–5 June 2011. [Google Scholar]
- Li, G.; Han, Y.; Yang, H. A new underwater acoustic signal denoising method based on modified uniform phase empirical mode decomposition, hierarchical amplitude-aware permutation entropy, and optimized improved wavelet threshold denoising. Ocean Eng. 2024, 293, 116629. [Google Scholar] [CrossRef]
- Li, H.; Li, S.; Sun, J.; Huang, B.; Zhang, J.; Gao, M. Ultrasound signal processing based on joint GWO-VMD wavelet threshold functions. Measurement 2024, 226, 13. [Google Scholar] [CrossRef]
- Li, G.; Bu, W.; Yang, H. Research on noise reduction method for ship radiated noise based on secondary decomposition. Ocean Eng. 2023, 268, 113412. [Google Scholar] [CrossRef]
- Yang, H.; Yang, X.; Li, G. Dual feature extraction system for ship-radiated noise and its application extension. Ocean Eng. 2023, 285, 115352. [Google Scholar] [CrossRef]
- Li, G.; Liu, F.; Yang, H. Research on Feature Extraction Method of Ship Radiated Noise with K-nearest Neighbor Mutual Information Variational Mode Decomposition, Neural Network Estimation Time Entropy and Self-organizing Map Neural Network. Measurement 2022, 199, 111446. [Google Scholar] [CrossRef]
- Gao, R.; Liang, M.; Dong, H.; Luo, X.; Suganthan, P.N. Underwater Acoustic Signal Denoising Algorithms: A Survey of the State-of-the-art. IEEE Trans. Instrum. Meas. 2025, 74, 6502318. [Google Scholar] [CrossRef]
- Zhou, M.; Wang, J.; Feng, X.; Sun, H.; Li, J.; Kuai, X. On generative-adversarial-network-based underwater acoustic noise modeling. IEEE Trans. Veh. Technol. 2021, 70, 9555–9559. [Google Scholar] [CrossRef]
- Ashraf, H.; Jeong, Y.; Lee, C.H. Underwater ambient-noise removing GAN based on magnitude and phase spectra. IEEE Access 2021, 9, 24513–24530. [Google Scholar] [CrossRef]
- Zhou, A.; Zhang, W.; Xu, G.; Li, X.; Deng, K.; Song, J. DBSA-net: Dual branch self-attention network for underwater acoustic signal denoising. IEEE/ACM Trans. Audio Speech Lang. Process. 2023, 31, 1851–1865. [Google Scholar] [CrossRef]
- Zhou, A.; Zhang, W.; Li, X.; Xu, G.; Zhang, B.; Ma, Y.; Song, J. A novel noise-aware deep learning model for underwater acoustic denoising. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4202813. [Google Scholar] [CrossRef]
- Stojanovic, M. Recent advances in high-speed underwater acoustic communications. IEEE J. Ocean. Eng. 1996, 21, 125–136. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, J.; Zakharov, Y.; Li, X.; Li, J. Deep learning based underwater acoustic OFDM communications. Appl. Acoust. 2019, 154, 53–58. [Google Scholar] [CrossRef]
- Li, D.; Liu, F.; Shen, T.; Chen, L.; Zhao, D. Data augmentation method for underwater acoustic target recognition based on underwater acoustic channel modeling and transfer learning. Appl. Acoust. 2023, 208, 109344. [Google Scholar] [CrossRef]
- Li, R.; Wang, L.; Suganthan, P.N.; Sourina, O. Sample-based data augmentation based on electroencephalogram intrinsic characteristics. IEEE J. Biomed. Health Inform. 2022, 26, 4996–5003. [Google Scholar] [CrossRef]
- Wang, X.; Wu, P.; Li, B.; Zhan, G.; Liu, J.; Liu, Z. A self-supervised dual-channel self-attention acoustic encoder for underwater acoustic target recognition. Ocean Eng. 2024, 299, 117305. [Google Scholar] [CrossRef]
- Zhou, X.; Yang, K. A denoising representation framework for underwater acoustic signal recognition. J. Acoust. Soc. Am. 2020, 147, EL377–EL383. [Google Scholar] [CrossRef]
- Zhou, A.; Li, X.; Zhang, W.; Li, D.; Deng, K.; Ren, K.; Song, J. A Novel Cross-Attention Fusion-Based Joint Training Framework for Robust Underwater Acoustic Signal Recognition. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4209516. [Google Scholar] [CrossRef]
- Koh, S.; Chia, C.S.; Tan, B.A. Underwater Signal Denoising Using Deep Learning Approach. In Proceedings of the Global Oceans 2020: Singapore – U.S. Gulf Coast, Biloxi, MI, USA, 5–30 October 2020. [Google Scholar]
- Tian, S.; Chen, D.; Wang, H.; Liu, J. Deep convolution stack for waveform in underwater acoustic target recognition. Sci. Rep. 2021, 11, 9614. [Google Scholar] [CrossRef]
- Ashraf, H.; Shah, B.; Soomro, A.M.; Safdar, Q.u.A.; Halim, Z.; Shah, S.K. Ambient-noise free generation of clean underwater ship engine audios from hydrophones using generative adversarial networks. Comput. Electr. Eng. 2022, 100, 107970. [Google Scholar] [CrossRef]
- Chengkun, W.; Zhifeng, Z.; Bohua, C.; Yong, Y. Denoise for propeller acoustic signals based on the improved wavelet thresholding algorithm of CEEMDAN. Cogent Eng. 2024, 11, 2327570. [Google Scholar] [CrossRef]
- Kilfoyle, D.B.; Baggeroer, A.B. The state of the art in underwater acoustic telemetry. IEEE J. Ocean. Eng. 2000, 25, 4–27. [Google Scholar] [CrossRef]
- Chitre, M.; Shahabudeen, S.; Stojanovic, M. Underwater Acoustic Communications and Networking: Recent Advances and Future Challenges. Mar. Technol. Soc. J. 2008, 42, 103–116. [Google Scholar] [CrossRef]
- Ren, Q.; Cheng, X. Latency-optimized and energy-efficient MAC protocol for underwater acoustic sensor networks: A cross-layer approach. EURASIP J. Wirel. Commun. Netw. 2010, 2010, 323151. [Google Scholar] [CrossRef]
- Alraie, H.; Alahmad, R.; Ishii, K. Double the data rate in underwater acoustic communication using OFDM based on subcarrier power modulation. J. Mar. Sci. Technol. 2024, 29, 457–470. [Google Scholar] [CrossRef]
- Kumara, S.; Vatsb, C. Underwater communication: A detailed review. In Proceedings of the CEUR Workshop Proceedings, Kharkiv, Ukraine, 20–21 September 2021. [Google Scholar]
- Bhagya Sri, K.N.K.; Mukherjee, S.; Chakraborty, U. An investigation on a four-channel 3D network model for underwater RF communication. In Proceedings of the 2023 8th International Conference on Computers and Devices for Communication (CODEC), Kolkata, India, 14–16 December 2023. [Google Scholar]
- Farkhadov, M.; Kuprikov, O.; Komanich, D. Underwater Wireless Communications Researching, Analysis and Comparison. In Proceedings of the 2023 5th International Conference on Problems of Cybernetics and Informatics (PCI), Baku, Azerbaijan, 28–30 August 2023. [Google Scholar]
- Gussen, C.M.G.; Diniz, P.S.R.; Campos, M.L.R.; Martins, W.A.; Gois, J.N. A Survey of Underwater Wireless Communication Technologies. J. Commun. Inf. Syst. 2016, 31, 242–255. [Google Scholar] [CrossRef]
- Dowden, R.L.; Holzworth, R.H.; Rodger, C.J.; Lichtenberger, J.; Thomson, N.R.; Jacobson, A.R.; Lay, E.; Brundell, J.B.; Lyons, T.J.; O’Keefe, S. World-Wide Lightning Location Using VLF Propagation in the Earth-Ionosphere Waveguide. IEEE Antennas Propag. Mag. 2008, 50, 40–60. [Google Scholar] [CrossRef]
- PSS, P.G.; Venkataraman, H. 3D E-CRUSE: Energy-based throughput analysis of three dimensional underwater network using RF communication. J. Ocean Eng. Sci. 2022, 7, 155–162. [Google Scholar] [CrossRef]
- Che, X.; Wells, I.; Dickers, G.; Kear, P.; Gong, X. Re-evaluation of RF electromagnetic communication in underwater sensor networks. IEEE Commun. Mag. 2010, 48, 143–151. [Google Scholar] [CrossRef]
- Han, S.; Noh, Y.; Lee, U.; Gerla, M. Optical-acoustic Hybrid Network Toward Real-time Video Streaming for Mobile Underwater Sensors. Ad Hoc Netw. 2018, 83, 1–7. [Google Scholar] [CrossRef]
- Duntley, S.Q. Light in the Sea. J. Opt. Soc. Am. 1963, 53, 214–233. [Google Scholar] [CrossRef]
- Vali, Z.; Gholami, A.; Ghassemlooy, Z.; Omoomi, M.; Michelson, D. Experimental study of the turbulence effect on underwater optical wireless communications. Appl. Opt. 2018, 57, 8314–8319. [Google Scholar] [CrossRef]
- Nakamura, K.; Mizukoshi, I.; Hanawa, M. Optical wireless transmission of 405 nm, 1.45 Gbit/s optical IM/DD-OFDM signals through a 4.8 m underwater channel. Opt. Express 2015, 23, 1558–1566. [Google Scholar] [CrossRef]
- Xiaoyan, L.; Suyu, Y.; Xiaolin, Z.; Zhilai, F.; Zhi-Jun, Q.; Laigui, H.; Chunxiao, C.; Lirong, Z.; Ran, L.; Pengfei, T. 34.5 m underwater optical wireless communication with 2.70 Gbps data rate based on a green laser diode with NRZ-OOK modulation. Opt. Express 2017, 25, 27937–27947. [Google Scholar]
- Wang, J.; Lu, C.; Li, S.; Xu, Z. 100 m/500 Mbps underwater optical wireless communication using an NRZ-OOK modulated 520 nm laser diode. Opt. Express 2019, 27, 12171. [Google Scholar] [CrossRef]
- Duan, Y.; Zhou, H.; Jiang, Z.; Ramakrishnan, M.; Su, X.; Ko, W.; Zuo, Y.; Lian, H.; Zeng, R.; Wang, Y. Demonstration of an 8-Gbit/s quadrature-phase-shift-keying coherent underwater wireless optical communication link using coherent heterodyne detection under scattering conditions. Opt. Lett. 2024, 49, 123–126. [Google Scholar] [CrossRef]
- Baykal, Y.; Ata, Y.; Gokce, M.C. Underwater turbulence, its effects on optical wireless communication and imaging: A review. Opt. Laser Technol. 2022, 156, 108624. [Google Scholar] [CrossRef]
- El-Mottaleb, S.A.A.; Singh, M.; Atieh, A.; Aly, M.H. OCDMA transmission-based underwater wireless optical communication system: Performance analysis. Opt. Quantum Electron. 2023, 55, 465. [Google Scholar] [CrossRef]
- Shen, C.; Guo, Y.; Oubei, H.M.; Ng, T.K.; Ooi, B.S. 20-m underwater wireless optical communication link with 15 Gbps data rate. Opt. Express 2016, 24, 25502. [Google Scholar] [CrossRef]
- Zeng, Z.; Fu, S.; Zhang, H.; Dong, Y.; Cheng, J. A Survey of Underwater Optical Wireless Communications. IEEE Commun. Surv. Tutor. 2017, 19, 204–238. [Google Scholar] [CrossRef]
- Oubei, H.M.; Duran, J.R.; Janjua, B.; Wang, H.Y.; Tsai, C.T. 4.8 Gbit/s 16-QAM-OFDM transmission based on compact 450-nm laser for underwater wireless optical communication. Opt. Express 2015, 23, 23302. [Google Scholar] [CrossRef]
- Doniec, M.; Vasilescu, I.; Chitre, M.; Detweiler, C.; Hoffmann-Kuhnt, M.; Rus, D. AquaOptical: A lightweight device for high-rate long-range underwater point-to-point communication. In Proceedings of the Oceans, Sydney, Australia, 24–27 May 2010. [Google Scholar]
- Xu, J.; Kong, M.; Lin, A.; Song, Y.; Deng, N. OFDM-based broadband underwater wireless optical communication system using a compact blue LED. Opt. Commun. 2016, 369, 100–105. [Google Scholar] [CrossRef]
- Xu, J.; Song, Y.; Yu, X.; Lin, A.; Kong, M.; Han, J.; Deng, N. Underwater wireless transmission of high-speed QAM-OFDM signals using a compact red-light laser. Opt. Express 2016, 24, 8097–8109. [Google Scholar] [CrossRef]
- Oubei, H.M.; Li, C.; Park, K.H.; Ng, T.K.; Alouini, M.S.; Ooi, B.S. 2.3 Gbit/s underwater wireless optical communications using directly modulated 520 nm laser diode. Opt. Express 2015, 23, 20743–20748. [Google Scholar] [CrossRef]
- Anguita, D.; Brizzolara, D.; Parodi, G.; Hu, Q. Optical wireless underwater communication for AUV: Preliminary simulation and experimental results. In Proceedings of the OCEANS 2011 IEEE-Spain, Santander, Spain, 6–9 June 2011. [Google Scholar]
- Li, B.; Zhou, S.; Huang, J.; Willett, P. Scalable OFDM design for underwater acoustic communications. In Proceedings of the 2008 IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 31 March–4 April 2008. [Google Scholar]
- Palmeiro, A.; Martín, M.; Crowther, I.; Rhodes, M. Underwater radio frequency communications. In Proceedings of the OCEANS 2011 IEEE-Spain, Santander, Spain, 6–9 June 2011. [Google Scholar]
- Stojanovic, M.; Catipovic, J.; Proakis, J.G. Adaptive multichannel combining and equalization for underwater acoustic communications. J. Acoust. Soc. Am. 1993, 94, 1621–1631. [Google Scholar] [CrossRef]
- Chen, T.; He, H.; Xie, G. BECS-II: An updated bio-inspired electrocommunication system for small underwater robots. Bioinspir. Biomimetics 2023, 18, 066004. [Google Scholar] [CrossRef]
- Wang, W.; Liu, J.; Xie, G.; Wen, L.; Zhang, J. A bio-inspired electrocommunication system for small underwater robots. Bioinspir. Biomimetics 2017, 12, 036002. [Google Scholar] [CrossRef]
- Pavan, A.; Kumar, A.; Sharma, D. Design and Evaluation of a Hybrid RF-Acoustic Underwater Communication System for Short-Range Sensor Networks. In Proceedings of the ACM International Conference on Underwater Networks and Systems (WUWNet), Boston, MA, USA, 14–16 November 2022. [Google Scholar]
- Sun, B.; Li, W.; Wang, Z.; Zhu, Y.; He, Q.; Guan, X.; Dai, G.; Yuan, D.; Li, A.; Cui, W.; et al. Recent progress in modeling and control of bio-inspired fish robots. J. Mar. Sci. Eng. 2022, 10, 773. [Google Scholar] [CrossRef]
- Li, J.; Li, W.; Liu, Q.; Luo, B.; Cui, W. Current Status and Technical Challenges in the Development of Biomimetic Robotic Fish-Type Submersible. Ocean-Land-Atmos. Res. 2024, 3, 0036. [Google Scholar] [CrossRef]
- Jiang, W.; Yang, X.; Tong, F.; Yang, Y.; Zhou, T. A low-complexity underwater acoustic coherent communication system for small AUV. Remote Sens. 2022, 14, 3405. [Google Scholar] [CrossRef]
- Ayaz, M.; Baig, I.; Abdullah, A.; Faye, I. Hybrid acoustic-optical underwater wireless sensor networks: A review. Ad Hoc Netw. 2022, 132, 103088. [Google Scholar]
- Yuan, D.; Wang, X.; Zhang, L. A novel RF-assisted underwater IoUT architecture for short-range high-throughput applications. In Proceedings of the OCEANS 2022-Marseille, Marseille, France, 13–14 June 2022. [Google Scholar]
- Li, B.; Zhang, R.; Wang, X. Cross-medium communication in underwater wireless sensor networks: A survey. IEEE Access 2022, 10, 31455–31475. [Google Scholar]
- Ismail, A.; Alouini, M. Internet of underwater things communication: Architecture, technologies, research challenges, and future opportunities. Ad Hoc Netw. 2022, 130, 102933. [Google Scholar]
- Bicen, A.; Akyildiz, I. Cross-medium underwater wireless communication and networking: A new paradigm. In Proceedings of the OCEANS 2022-Chennai, Chennai, India, 21–24 February 2022. [Google Scholar]
- Mohanraju M, A.S.; Lokam, A. Internet of Underwater Things: Challenges and Applications. In Proceedings of the 2022 IEEE International Symposium on Smart Electronic Systems (iSES), Warangal, India, 18–22 December 2022; pp. 615–618. [Google Scholar]
- Yang, F.; Zhang, Q.; Cui, J.H. Intelligent underwater acoustic communication using deep reinforcement learning. IEEE Commun. Mag. 2020, 58, 74–79. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).