
A Novel iTransformer-Based Approach for AIS Data-Assisted CFAR Detection



Abstract
1. Introduction
1.1. Related Work
1.2. Contributions
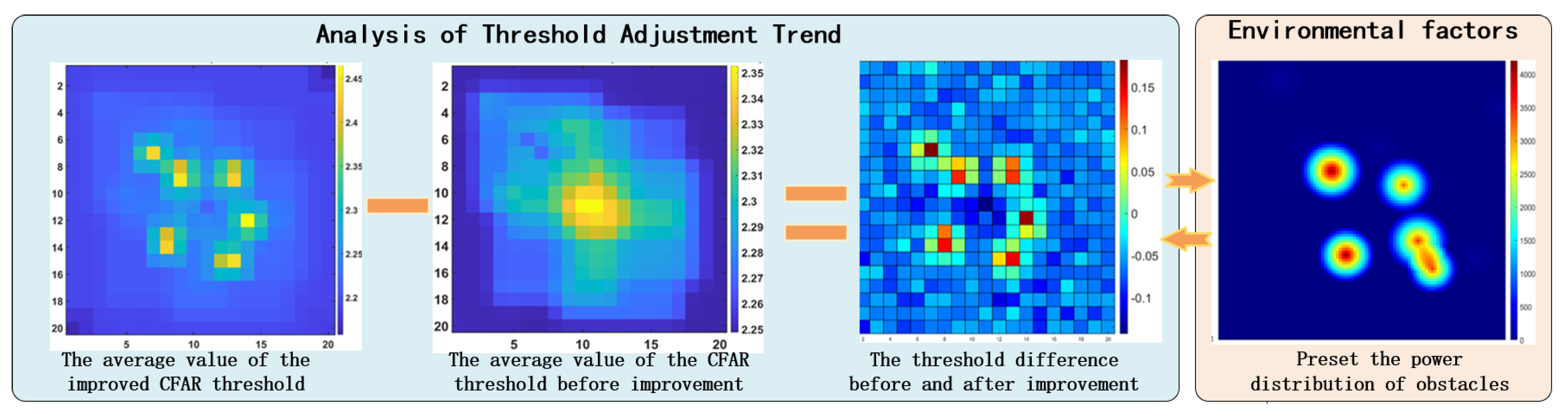
- To adapt to real-world scenarios, we performed a comparative analysis between the model inputs (radar signals, AIS data, enhanced CA-CFAR detection results, and spatial encoding) with the improved CFAR threshold outputs. This analysis yielded a weakly supervised evaluation index for constructing the loss function. The design enabled the model to prioritize targets with AIS data, but missed by radar, adaptively reducing detection thresholds around these targets to enhance the detection of other small vessels.
- To avoid falling into local optima and neglecting less influential factors during training, we employed the Gumbel-softmax annealing algorithm. This algorithm regulated the relaxation degree throughout training, enabling extensive exploration in the early stage and focused optimization in the later stage.
2. Methods
2.1. Construction of Simulated Scenes
2.2. Early Iterative Ideas and Limitations
2.3. Model Training
2.3.1. Spatial Position Enhancement Mechanism
2.3.2. Parameter Term of Weakly Supervised Evaluation System
- Correct detection maintenance (case 1): When both pre- and post-improvement CFAR detection results are “1” and AIS = 1, the model stably identifies known vessels. A mild reward weight (0.005) reinforces detection consistency to avoid erroneous elimination of valid targets.
- Missed-detection correction (case 2): If the post-improvement detection is “1,” pre-improvement detection is “0,” and AIS = 1, the model corrects the missed detection of weak-signal targets by traditional CFAR. A high reward weight (1.1) prioritizes optimizing such critical scenarios.
- Uncorrected missed detection (case 3): When both pre- and post-improvement detections are “0” and AIS = 1, the model fails to detect AIS-enabled vessels. A penalty weight (−1.2) forces the model to enhance sensitivity to low-signal-to-noise-ratio targets.
- Erroneous missed detection (case 4): If the post-improvement detection is “0,” pre-improvement detection is “1,” and AIS = 1, the model erroneously eliminates valid detections. The strongest penalty (−1.7) suppresses such severe misjudgments.
2.3.3. Constraint Term of Weakly Supervised Evaluation System
2.3.4. Constraint Term of Gumbel-Softmax Annealing Algorithm
3. Experiments
3.1. Study Area and Experimental Setup
3.2. Comparison of the CFAR Algorithm Before and After Improvement in a Single Sample
3.3. Analysis of the Changing Trends of Parameter Terms
3.4. Analysis of the Changing Trends of Constraint Terms
3.5. Analysis of Model Learning Trends
4. Discussion
4.1. Real-World Validation
4.2. Model Training Speed Optimization
4.3. Enhance the Local Detection Ability
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Characteristics of the Rayleigh Distribution
Appendix A.2. Characteristics of the K Distribution
Appendix A.3. Theoretical Support for Superimposing Rayleigh and K Distributions to Simulate Sea Clutter
Appendix A.4. Zero-Mean Complex Gaussian Process
Appendix A.5. Influence of Seabed Topographic Gradient Parameters on Clutter Power

Appendix A.6. Obstacle Scattering and Multipath Effect
Appendix A.7. Spatiotemporal Correlation Model

Appendix A.8. Comprehensive Integration of MoM and GTD for Obstacle Echo Modeling
Appendix A.9. GTD-Driven Scattering Mechanisms and System Integration
References
- Corbane, C.; Najman, L.; Pecoul, E.; Demagistri, L.; Petit, M.A. Complete processing chain for vessel detection using optical satellite imagery. Int. J. Remote Sens. 2010, 31, 5837–5854. [Google Scholar] [CrossRef]
- Zhang, S.; Wu, R.; Xu, K.; Wang, J.; Sun, W. R-CNN-based vessel detection from high resolution remote sensing imagery. Remote Sens. 2019, 11, 631. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, C.; Zhang, H.; Dong, Y.; Wei, S. A SAR dataset of vessel detection for deep learning under complex backgrounds. Remote Sens. 2019, 11, 765. [Google Scholar] [CrossRef]
- Mahafza, B.R. Radar Systems Analysis and Design Using MATLAB; Chapman and Hall/CRC: Boca Raton, FL, USA, 2005. [Google Scholar]
- Gandhi, P.P.; Kassam, S.A. Analysis of CFAR processors in nonhomogeneous background. IEEE Trans. Aerosp. Electron. Syst. 1988, 24, 427–445. [Google Scholar] [CrossRef]
- Geng, X.; Zhao, L.; Shi, L.; Yang, J.; Li, P.; Sun, W. Small-Sized Ship Detection Nearshore Based on Lightweight Active Learning Model with a Small Number of Labeled Data for SAR Imagery. Remote Sens. 2021, 13, 3400. [Google Scholar] [CrossRef]
- Swamidoss, I.N.; Al Mansoori, A.; Shajahan, S.; Al Remeithi, H.; Al Marzooqi, A.; Bouamer, T.; Sayadi, S. Image quality assessment of thermal images for Maritime surveillance applications. In Proceedings of the SPIE Future Sensing Technologies 2024, Yokohama, Japan, 28 May 2024; SPIE: Bellingham, WA, USA, 2024; Volume 13083, pp. 270–277. [Google Scholar]
- Keerthiga, K.; Narmadha, M. Next-Gen Maritime Security by Leveraging Advanced AIS Analytics for Precision Detection and Monitoring of Boats in Ocean 2024. In Proceedings of the Third International Conference on Smart Technologies and Systems for Next Generation Computing (ICSTSN), Villupuram, India, 18–19 July 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 1–6. [Google Scholar]
- Cao, C.; Zhang, J.; Meng, J.; Zhang, X.; Mao, X. Analysis of ship detection performance with full-, compact-and dual-polarimetric SAR. Remote Sens. 2019, 11, 2160. [Google Scholar] [CrossRef]
- Zhao, J.; Jiang, R.; Wang, X.; Gao, H. Robust CFAR detection for multiple targets in K-distributed sea clutter based on machine learning. Symmetry 2019, 11, 1482. [Google Scholar] [CrossRef]
- Al-dabaa, M.M.; Emran, A.A.; Yahya, A.; El-Mashade, M.; Aboshosha, A. Optimizing Multiple-Target CFAR Detection Efficacy through Advanced Intelligent Clustering Algorithms within K-Distribution Sea Clutter Environments. J. Al-Azhar Univ. Eng. Sect. 2024, 19, 250–269. [Google Scholar] [CrossRef]
- Weiss, M. Analysis of some modified cell-averaging CFAR processors in multiple-target situations. IEEE Trans. Aerosp. Electron. Syst. 2007, 20, 102–114. [Google Scholar] [CrossRef]
- Rihan, M.Y.; Nossair, Z.B.; Mubarak, R.I. An improved CFAR algorithm for multiple environmental conditions. Signal Image Video Process. 2024, 18, 3383–3393. [Google Scholar] [CrossRef]
- Liu, H.; Song, J.; Ren, L.; Sun, S.; Guo, C.; Ding, Z.; Xu, C. CFAR Detection of High Grazing Angle Sea-Clutter Based on KR Distribution. J. Phys. Conf. Ser. 2019, 1169, 012022. [Google Scholar] [CrossRef]
- Hansen, V.G.; Sawyers, J.H. Detectability loss due to “greatest of” selection in a cell-averaging CFAR. IEEE Trans. Aerosp. Electron. Syst. 1980, 31, 115–118. [Google Scholar] [CrossRef]
- Lin, C.H.; Lin, Y.C.; Bai, Y.; Chung, W.-H.; Lee, T.-S.; Huttunen, H. DL-CFAR: A novel CFAR target detection method based on deep learning. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Diskin, T.; Beer, Y.; Okun, U.; Wiesel, A. CFARNet: Deep Learning for Target Detection with constant false alarm rate. Signal Process. 2024, 223, 109543. [Google Scholar] [CrossRef]
- Roldan, I.; Palffy, A.; Kooij, J.F.P.; Gavrila, D.M.; Fioranelli, F.; Yarovoy, A. See further than cfar: A data-driven radar detector trained by lidar. In Proceedings of the 2024 IEEE Radar Conference (RadarConf24), Denver, CO, USA, 13 June 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 1–6. [Google Scholar]
- Liu, Y.; Hu, T.; Zhang, H.; Wu, H.; Wang, S.; Ma, L.; Long, M. itransformer: Inverted transformers are effective for time series forecasting. arXiv 2023, arXiv:2310.06625. [Google Scholar]
- Tian, Z.W.; Qian, R.L. Chinese Water Demand Forecast Based on iTransformer Model; IEEE Access: Piscataway, NJ, USA, 2024. [Google Scholar]
- Jia, W.; Guan, S.; Xue, Y. TL-iTransformer: Revolutionizing sea surface temperature prediction through iTransformer and transfer learning. Earth Sci. Inform. 2024, 17, 4847–4857. [Google Scholar] [CrossRef]
- Watts, S. Modeling and simulation of coherent sea clutter. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3303–3317. [Google Scholar] [CrossRef]
- Watts, S. A new method for the simulation of coherent sea clutter. In Proceedings of the 2011 IEEE RadarCon (RADAR), Kansas City, MO, USA, 23–27 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 52–57. [Google Scholar]
- Arikan, F.; Vural, N. Simulation of sea clutter at various frequency bands. J. Electromagn. Waves Appl. 2005, 19, 529–542. [Google Scholar] [CrossRef]
- Zeng, P.; Zhang, Y.; Xia, X.; Zhang, J.; Du, P.; Hua, Z.; Li, S. Research on Sea Clutter Simulation Method Based on Deep Cognition of Characteristic Parameters. Remote Sens. 2024, 16, 4741. [Google Scholar] [CrossRef]
- Jang, E.; Gu, S.; Poole, B. Categorical reparameterization with gumbel-softmax. arXiv 2016, arXiv:1611.01144. [Google Scholar]
- Shen, J.; Zhen, X.; Worring, M.; Shao, L. Variational multi-task learning with gumbel-softmax priors. Adv. Neural Inf. Process. Syst. 2021, 34, 21031–21042. [Google Scholar]
- Li, Y.; Liu, J.; Lin, G.; Hou, Y.; Mou, M.; Zhang, J. Gumbel-softmax-based optimization: A simple general framework for optimization problems on graphs. Comput. Soc. Netw. 2021, 8, 5. [Google Scholar] [CrossRef]
- Akhtar, J.; Olsen, K.E. A neural network target detector with partial CA-CFAR supervised training. In Proceedings of the 2018 International Conference on Radar (RADAR), Brisbane, Australia, 27 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Rohman, B.P.A.; Kurniawan, D.; Miftahushudur, M.T. Switching CA/OS CFAR using neural network for radar target detection in non-homogeneous environment. In Proceedings of the 2015 International Electronics Symposium (IES), Surabaya, Indonesia, 29–30 September 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 280–283. [Google Scholar]
- Cheikh, K.; Soltani, F. Application of neural networks to radar signal detection in K-distributed clutter. IEE Proc. Radar Sonar. Navig. 2006, 153, 460–466. [Google Scholar] [CrossRef]
- Dehghani, M.; Djolonga, J.; Mustafa, B.; Padlewski, P.; Heek, J.; Gilmer, J.; Steiner, A.P.; Caron, M.; Geirhos, R.; Alabdulmohsin, I.; et al. Scaling vision transformers to 22 billion parameters. In Proceedings of the International Conference on Machine Learning, Vancouver, BC, Canada, 13–19 July 2025; PMLR: New York, NY, USA, 2023; pp. 7480–7512. [Google Scholar]
- Radosavovic, I.; Dollár, P.; Girshick, R.; Gkioxari, G.; He, K. Data distillation: Towards omni-supervised learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4119–4128. [Google Scholar]
- Hussain, T.; Anwar, A.; Anwar, S.; Petersson, L.; Wook Baik, S. Pyramidal attention for saliency detection. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), New Orleans, LA, USA, 19–20 June 2022; IEEE: New York, NY, USA, 2022; pp. 2877–2887. [Google Scholar]
- Zhou, T.; Ma, Z.; Wen, Q.; Sun, L.; Jin, R. Fedformer: Frequency enhanced decomposed transformer for long-term series forecasting. In Proceedings of the International Conference on Machine Learning, Baltimore, MD, USA, 17–23 July 2022; PMLR: New York, NY, USA, 2022; pp. 27268–27286. [Google Scholar]
- Zhang, J.; Guo, L.; Song, L.; Gao, S.; Hao, C.; Li, X. PatchTCN: Patch-Based Transformer Convolutional Network for Times Series Analysis. In Proceedings of the 2024 3rd International Symposium on Computing and Artificial Intelligence, New York, NY, USA, 22–24 November 2024; pp. 1–9. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detection Method | Total Number of Cells | Average Number of Undetected Cells | Average Number of Cells That Missed Detection |
|---|---|---|---|
| CFAR before improvement | 400 | 3.7152 | 4.1379 |
| Improved CFAR | 400 | 1.2461 | 1.1012 |
| False-Alarm Rate | Missed-Detection Rate | |
|---|---|---|
| CFAR before improvement | 0.794% | 1.034% |
| Improved CFAR | 0.312% | 0.275% |
| Improvement extent | 60.706% | 73.404% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suo, Y.; Yuan, Z.; Cui, L.; Li, G.; Sun, M. A Novel iTransformer-Based Approach for AIS Data-Assisted CFAR Detection. J. Mar. Sci. Eng. 2025, 13, 1475. https://doi.org/10.3390/jmse13081475
Suo Y, Yuan Z, Cui L, Li G, Sun M. A Novel iTransformer-Based Approach for AIS Data-Assisted CFAR Detection. Journal of Marine Science and Engineering. 2025; 13(8):1475. https://doi.org/10.3390/jmse13081475
Chicago/Turabian StyleSuo, Yongfeng, Zhenkai Yuan, Lei Cui, Gaocai Li, and Mei Sun. 2025. "A Novel iTransformer-Based Approach for AIS Data-Assisted CFAR Detection" Journal of Marine Science and Engineering 13, no. 8: 1475. https://doi.org/10.3390/jmse13081475
APA StyleSuo, Y., Yuan, Z., Cui, L., Li, G., & Sun, M. (2025). A Novel iTransformer-Based Approach for AIS Data-Assisted CFAR Detection. Journal of Marine Science and Engineering, 13(8), 1475. https://doi.org/10.3390/jmse13081475