1. Introduction
Efficient computational methods for vibroacoustic coupling, acoustic radiation, and sound propagation of elastic structural targets, such as surface ships and underwater vehicles, constitute a critical area in applying underwater acoustic technologies to marine engineering. Accurate prediction of radiation and propagation acoustic fields from these structural sources is essential to reveal their propagation characteristics in underwater environments, thereby providing scientific foundations for target noise level assessment, rapid identification, and other related engineering applications ([
1,
2]). The acoustic field of a target in the marine environment is inherently a coupled radiation and propagation process (Chen et al. [
3], Jiang et al. [
4], Huang et al. [
5], Zhang et al. [
6]). However, early studies on acoustic field modeling primarily focused on two separate aspects: vibroacoustic radiation computation from vibrating structures (Zhou and Joseph [
7], Frendi et al. [
8], Duan et al. [
9]), and sound propagation modeling in oceanic waveguides (Pekeris [
10], Jensen et al. [
11]). The former emphasizes the radiation characteristics of targets and their influencing factors, while the latter focuses on acoustic field modeling in diverse marine waveguides and the impact of underwater environments on propagation properties. Additionally, constrained by computational capabilities, early coupled models were typically limited to simple waveguide environments. With growing application demands, an increasing number of studies now explore integrated acoustic field computation in range dependent underwater acoustic environments (Lim and Ozard [
12], Oba [
13], Holland [
14], He et al. [
15]).
The core of coupled radiation and propagation computation for target acoustic fields lies in integrating the vibrational response of the target structure with radiation source based propagation models. Structural responses are typically resolved through analytical or numerical methods, whereas propagation fields require solving the Helmholtz equation. The widely used Finite Element Method/Boundary Element Method (FEM/BEM) framework employs FEM for target vibroacoustic radiation analysis and BEM for propagation field modeling. Leveraging FEM’s numerical precision, FEM/BEM has proven effective in applications like surface ship noise prediction and underwater structural target acoustic field calculations (Zheng et al. [
16], Peters et al. [
17], Li et al. [
18], Chen et al. [
19]). However, FEM/BEM faces limitations, particularly in BEM’s restricted capability to model propagation fields in non free field environments. Previous studies (Jiang et al. [
4], Zhang et al. [
6], Zou et al. [
20]) addressed this limitation by modifying boundary integral equation Green’s functions to analyze ideal waveguide propagation. However, these methods depend on Green’s functions formulated for shallow water environments with parallel boundaries, rendering them impractical for range dependent waveguides. To overcome this limitation, researchers (Huang et al. [
5], He et al. [
15], Zou et al. [
21]) introduced methods to extract equivalent radiation source terms from target vibrational responses or radiated fields, enabling propagation modeling in range dependent environments. Following this paradigm, this work reconstructs target radiated fields as superpositions of equivalent source fields. The equivalent source strengths are extracted from the radiated fields computed via FEM and subsequently fed into propagation models for propagation acoustic field computation.
To achieve efficient sound propagation computation in range dependent waveguides, it is essential to effectively couple appropriate propagation models with radiation models. Classical propagation models include normal mode, parabolic equation, ray theory, and virtual source models. Among these, virtual source models are widely used in simple waveguides with parallel boundaries (e.g., ideal or Pekeris waveguides (Jiang et al. [
4], Huang et al. [
5], Zhang et al. [
6])) due to their low complexity and high computational speed. However, their reliance on plane wave reflection approximations restricts applicability (Gao et al. [
22]). Ray theory, as high frequency approximations of the Helmholtz equation, originated from geometric acoustics and can explain sound propagation in certain real world environments (Gul et al. [
23], Porter [
24]). Yet, it face challenges in handling complex structural sources and environments: calculating eigenrays becomes computationally intensive, while caustic regions, bottom slope discontinuities, and boundary reflection coefficient uncertainties degrade prediction accuracy (Porter [
24]). Parabolic equations improve computational efficiency via paraxial approximations of the Helmholtz equation, neglecting backward scattering, and have been successfully applied to range dependent environments (Jensen and Kuperman [
25], Lin [
26], Sturm [
27]). Despite their flexibility in source type handling, the choice of operator expansion order and reference wavenumber significantly affects near field aperture angles and far field phase errors (Jensen et al. [
11]). Additionally, abrupt environmental variations may compromise their accuracy. Normal mode represents exact solutions to wave equations under specific boundary conditions. Although inherently limited to range independent problems, coupled normal mode methods decompose range dependent waveguides into range independent segments. By enforcing boundary conditions at each segment interface, a global coupling matrix is constructed to solve the acoustic field (Preisig and Duda [
28], Athanassoulis et al. [
29], Tu et al. [
30]). Despite high accuracy, this approach suffers from inefficiency due to repeated eigenvalue and eigenfunction computations across segments.
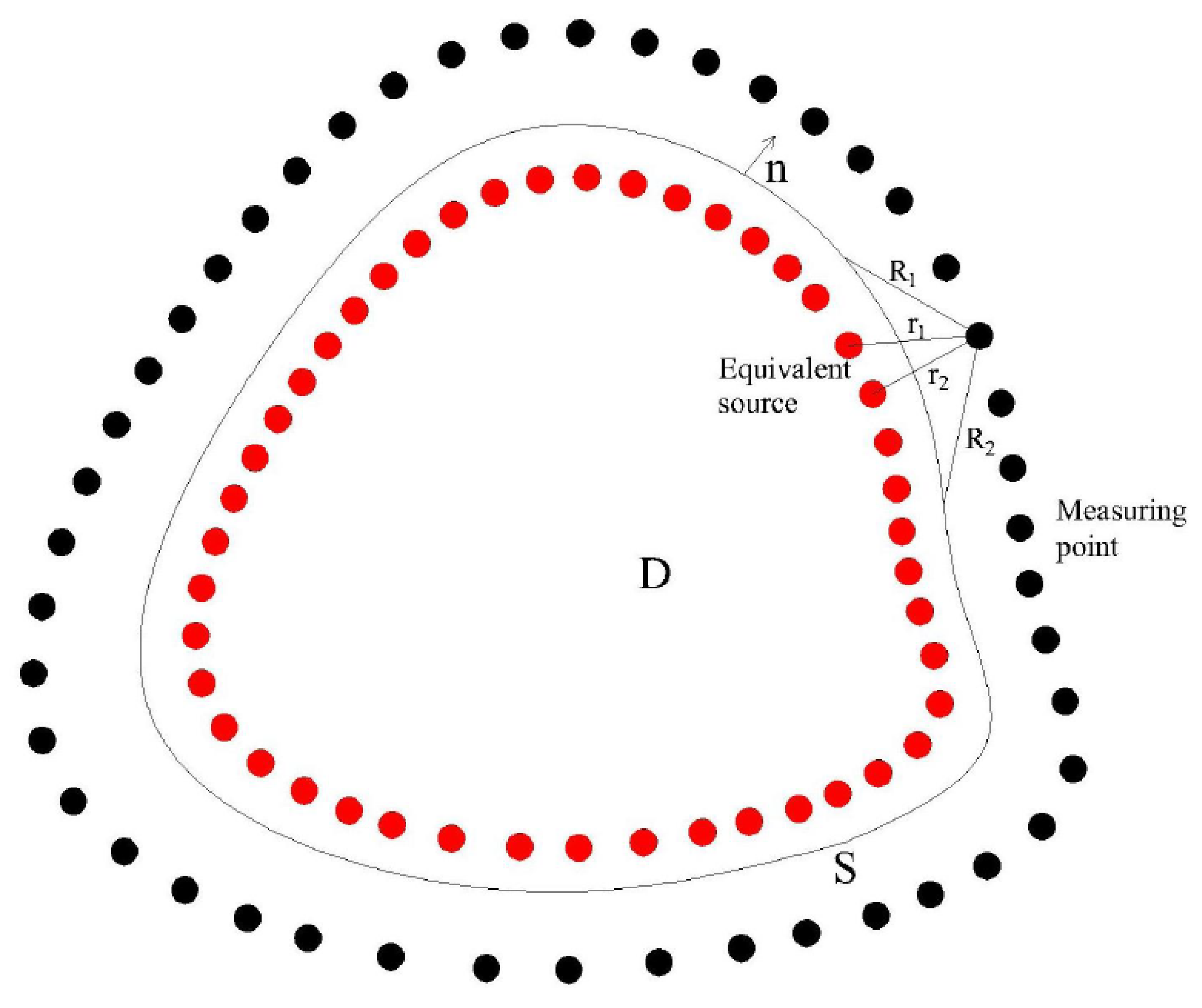
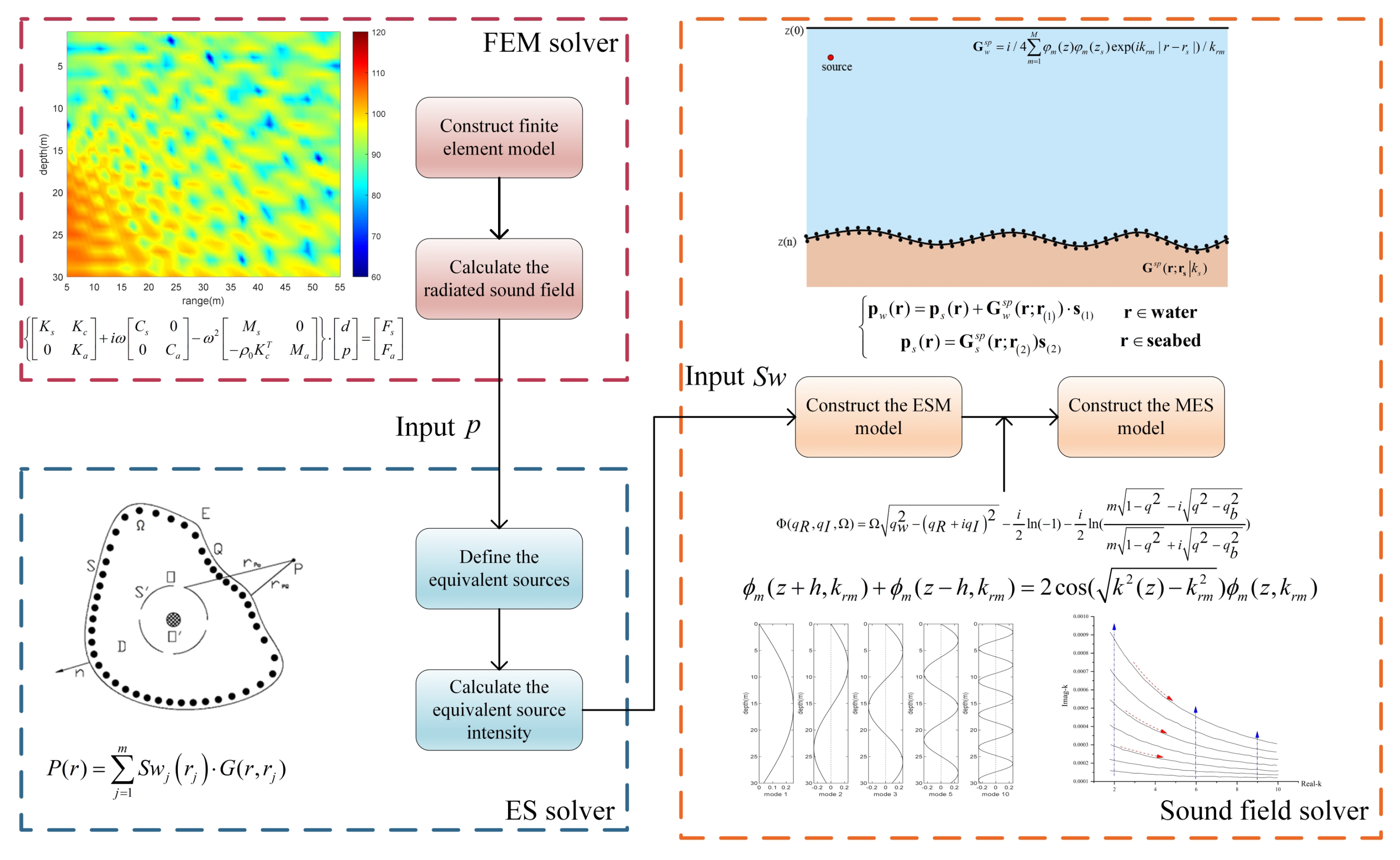
Beyond the aforementioned methods, the ESM have been extensively verified and applied to acoustic field calculations in range dependent waveguides (Abawi and Porter [
31], He et al. [
32]). The ESM replaces boundary reflected and transmitted sound fields by superimposing basis functions (Green’s functions) generated from equivalent sources to solve the Helmholtz equation rigorously. This method characterizes acoustic reflection and transmission at media interfaces through continuity conditions, avoiding errors and angular dependencies inherent in equivalent reflection coefficients, thereby achieving high computational accuracy. By vertical stratifying waveguides based on water column parameters, ESM simplifies modeling of complex underwater acoustic environments. However, for depth-dependent hydrological parameters, its accuracy and efficiency are highly sensitive to the number and spatial distribution of equivalent sources. Insufficient vertical stratification layers degrade accuracy if mismatched with the water column’s vertical discretization requirements. As the number of layers increases, the computational matrix size of equivalent sources grows as
(
is number of water layers,
is equivalent sources per layer). To mitigate these issues, recent studies proposed replacing free field Green’s functions with Helmholtz compliant basis functions (He et al. [
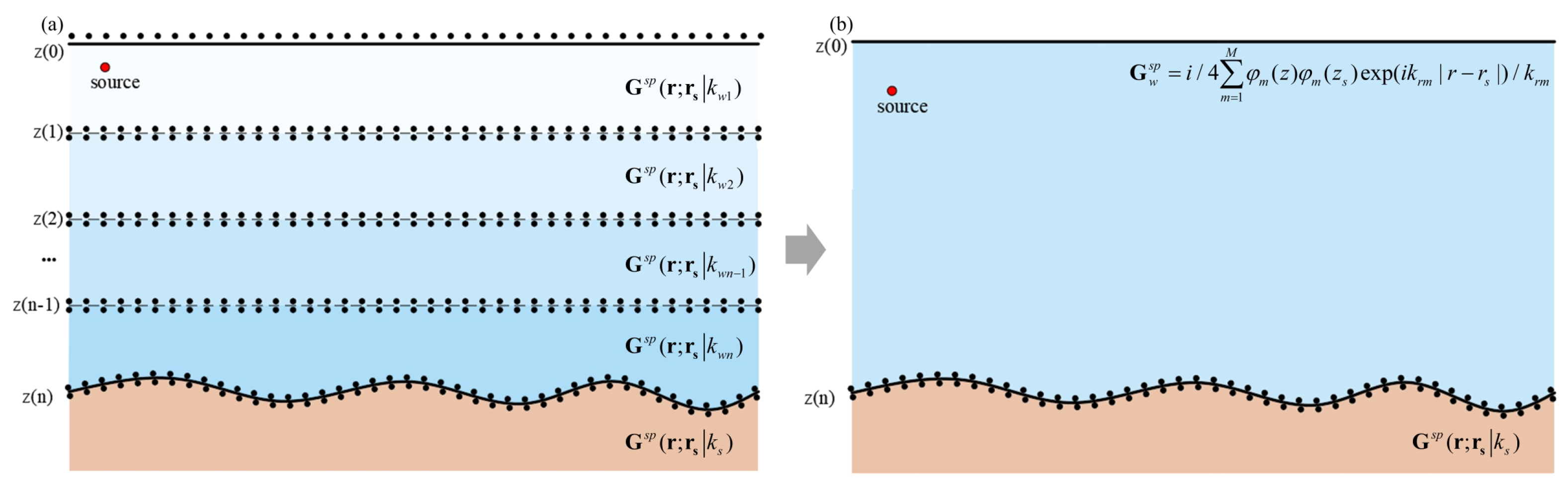
33]). Building on this, our work introduces normal mode based basis functions to replace conventional free field Green’s functions in ESM. By embedding water column parameters into basis functions, the equivalent source matrix size remains fixed at
, eliminating computational inefficiencies caused by vertical layering. Additionally, an equivalent waveguide is employed to solve for the eigenvalues and eigenmodes corresponding to the actual waveguide, while introducing a computationally efficient solution method for these eigenproblems.
To address limitations of traditional ESM in range-dependent waveguides with depth-dependent hydroacoustic parameters, such as deep-sea and polar regions, this study proposes a MES model and develops an integrated radiation-propagation computational framework by coupling with the Finite Element Method. In such environments, ESM employing free-field basis functions necessitates vertical waveguide stratification based on depth-dependent parameters, inevitably introducing approximation errors or computational inefficiency. To resolve this, we establish an MES model using normal modes, rather than free-field Green’s functions, as basis functions. This model reduces the computational matrix size from
to
, enhancing computational efficiency, while also computing acoustic fields in range-dependent environments using a single set of normal modes and providing a rapid normal mode construction method. Furthermore, the integrated framework comprehensively accounts for vibroacoustic radiation from structural sources, coupling effects between radiation and propagation, and influences of range dependent environments, enabling efficient resolution of coupled radiation and propagation problems in underwater acoustic scenarios. The structure of the paper is as follows:
Section 2 derives the theoretical foundations and implementation workflow of the proposed model.
Section 3 verifies the model’s computational accuracy and efficiency through comparisons with FEM and other benchmark methods.
Section 4 investigates key parameters influencing acoustic field structures by simulating the radiation propagation field of a cylindrical shell in a shallow water environment.
Section 5 further verifies the proposed model using sea test data.
Section 6 concludes the paper.
3. Model Verification
This section verifyies the model’s effectiveness, focusing on the calculation of the radiated sound field and its coupling with the propagation process. The simulation setup is shown in
Figure 4a: the water depth is 100 m, with a density of 1000 kg/m
3 and a sound speed of 1500 m/s. The seabed has a density of 1700 kg/m
3 and a sound speed of 1600 m/s. The radius of the elastic spherical shell is 0.5 m, with a thickness of 0.001 m. The Young’s modulus is
N/m
2, and the Poisson’s ratio is 0.3, the material density is 2710 kg/m
3. The shell is positioned at the center depth of the water column. The magnitude of the applied excitation force is 10 N, and the point of application is located on the
of the spherical shell. Two layers of holographic surfaces are used, with boundary conditions that match the sound pressure and displacement. The results are presented in
Figure 4b, where the black solid line represents the radiation directivity obtained through finite element analysis, and the red dashed line corresponds to the result from the equivalent radiation source method. The comparison demonstrates good agreement between the two methods, confirming that the equivalent radiation source accurately simulates the radiated sound field. It is important to note that the reconstruction of the sound source is sensitive to the sampling density and positioning of the field and equivalent points. Multiple optimizations of the source point locations and quantities can be performed to achieve optimal results. In the numerical examples presented in this paper, results were computed for numerous different source point distributions. The distribution yielding the minimum reconstruction error was ultimately selected.
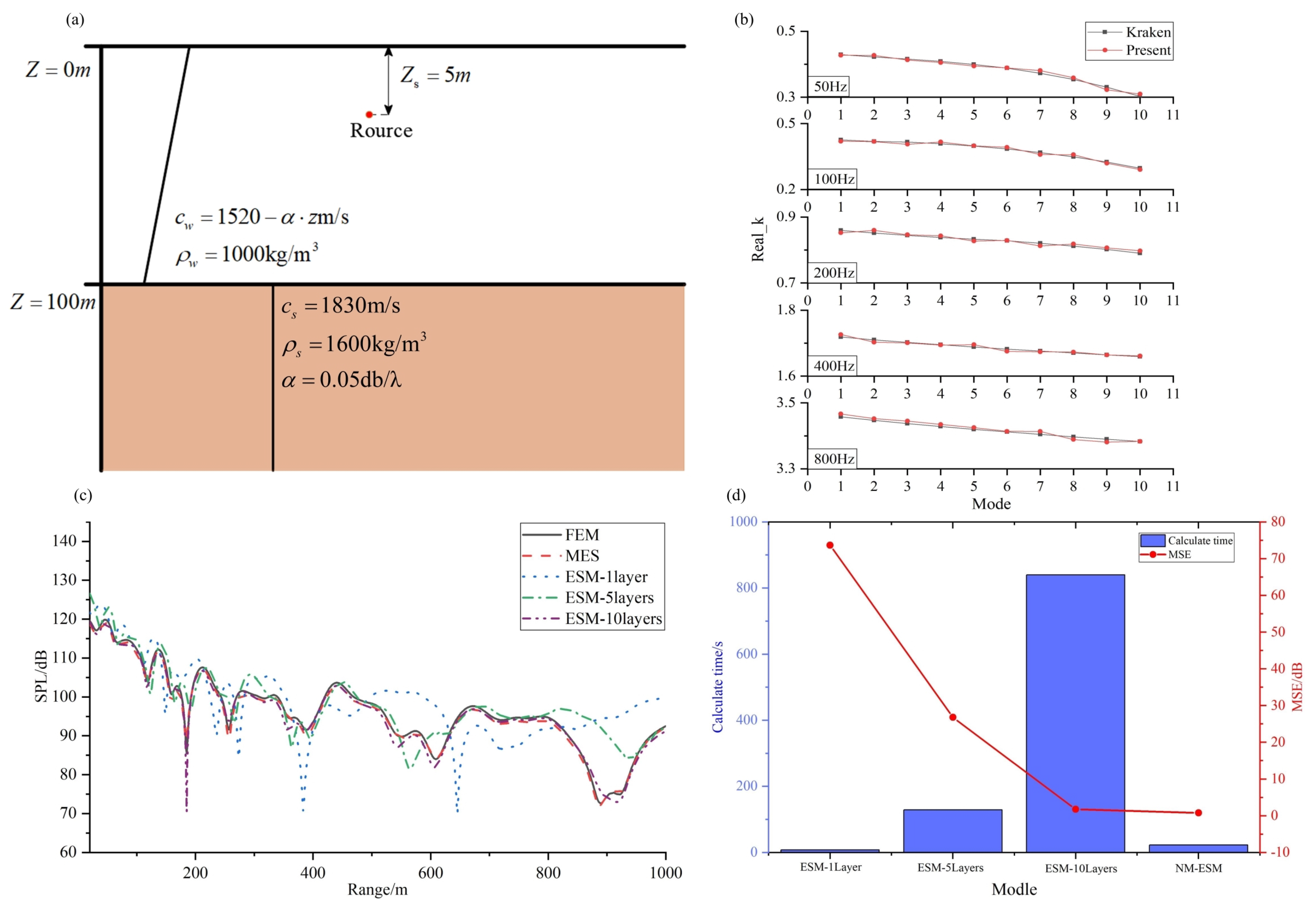
Next, the accuracy of the basis function solution and its application in the equivalent source method are verified. Consider the waveguide environment depicted in
Figure 5a, where the water depth is 100 m, the density is 1000 kg/m
3, and the sound speed varies from 1520 m/s to 1420 m/s with a negative gradient. The liquid seabed has a density of 1830 kg/m
3 and a sound speed of 1600 m/s, with seabed attenuation of 0.05 dB/
. First, the accuracy of the eigenvalue computation for the basis function is compared with the eigenvalues obtained from KRAKEN, which serve as a reference standard. Additionally, the acoustic field results from finite element calculations serve as the benchmark.
The comparison of eigenvalue computation accuracy is shown in
Figure 5b, where the first ten eigenvalues for several frequencies are presented. The results demonstrate that the eigenvalues calculated in this study are in high agreement with those from KRAKEN. Furthermore, the calculated eigenvalues and eigenfunctions are utilized as basis functions in the equivalent source method and compared with results from traditional equivalent source method in stratified water environments. The traditional equivalent source method employ one layer, five layers, and ten layers water divisions, using consistent methods and the same number of equivalent source points for each model.
Figure 5c presents the one dimensional sound field results at a receiver depth of 50 m. The results demonstrate that the modal equivalent source model closely matches the finite element results, while the traditional equivalent source method only shows good agreement when utilizing ten layers water division. This indicates that vertical stratification in traditional models must achieve a certain level of discretization accuracy to ensure valid results.
Figure 5d compares the traditional equivalent source method with the modal equivalent source model in terms of computational error and time. As the number of vertical layers increases, the computational error of the traditional models decreases, but the computation time increases significantly. For instance, at 100 Hz, the equivalent source distribution interval is 1 m, resulting in system matrix sizes of
(3 source groups, 1000 points each) for the single layer model, expanding to
and
for 5 layers and 10 layers models, respectively. The computation times for the three models were 8 s, 129 s, and 840 s, respectively. However, it should be noted that the average error remains below 2dB only in the 10 layers model. This leads to drastic efficiency degradation. In contrast, the modal equivalent source model avoids water column stratification, maintaining a constant matrix size. The computation time for this model was 23 s, with an average computation error within 2 dB. By introducing new basis functions, this paper reduces the matrix size of the equivalent source method from
to
, thereby improving computational efficiency. Although the basis functions involve higher complexity than free field Green’s functions, the computational time remains marginally higher than the single layer model but overall superior in efficiency.
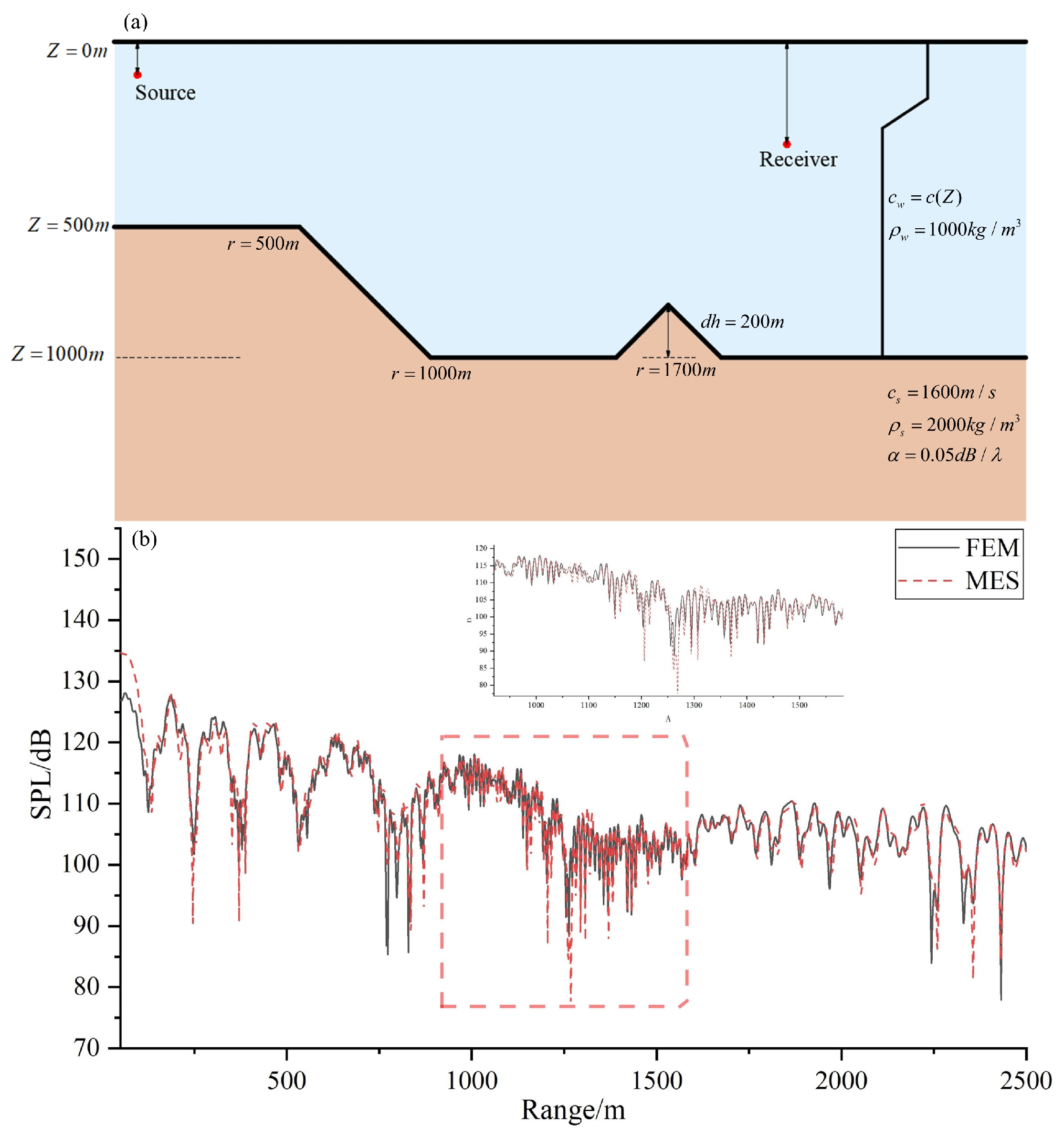
Finally, the applicability of the modal equivalent source model in range dependent waveguide is verified, and the error factors of the model are analyzed. The simulation environment for this case is shown in
Figure 6a, where the maximum water depth is 1000 m, with a density of 1000 kg/m
3 and a sound speed that decreases from 1520 m/s to 1460 m/s. The seabed has a density of 2000 kg/m
3 and a sound speed of 1600 m/s, with seabed attenuation of 0.05 dB/
. The source depth is 50 m, and the receiver depth is 300 m. The computed acoustic field results, shown in
Figure 6b, are compared against finite element calculation results as the reference. The average error between the two models was 3.2 dB, with FEM requiring a computation time of 16 min 52 s, whereas MES completed in 75 s. The modal equivalent source model exhibits strong agreement with the finite element results, demonstrating its high applicability in more complex waveguide environments. By constructing a set of modes satisfying the semi infinite space condition, the model can compute the acoustic field at any point within the semi infinite domain. Further, by superimposing equivalent sources representing seabed boundaries, it extends to waveguide scenarios with range dependent seabed conditions. Thus, the model requires only a single set of normal modes to compute propagating fields in range dependent environments, eliminating the need for separate modal calculations at different depths.
Based on the theoretical foundation of the modal equivalent source model and the simulation results above, certain errors persist. First, errors primarily arise from the construction of modal basis functions. On one hand, while a semi infinite space theoretically requires an infinite number of modes, practical computations involve a finite set. On the other hand, numerical errors in eigenvalue and eigenfunction calculations contribute additional inaccuracies. These factors manifest as larger errors in Green’s function and acoustic field computations when the distance between equivalent sources and reception points is small. To mitigate this, it is recommended to select a larger equivalent boundary depth and ensure sufficient modal quantities. In this example, the equivalent boundary depth is set to twice the actual maximum seabed depth, with small step sizes adopted for eigenvalue and eigenfunction calculations. Furthermore, errors arise from the impact of the equivalent source distribution on the source strength calculation and sound field computation. Relevant studies (Abawi and Porter [
31]) indicate that the distribution of equivalent sources should be based on a quarter wavelength reference distance. However, in practical applications, the optimal distribution differs at various frequencies. In the numerical examples presented in this paper, the optimal distribution of equivalent sources ranges from one fifth to one half of the wavelength. Within the numerical examples, results were computed for numerous different equivalent source point distributions. The distribution yielding the minimum reconstruction error was selected as the final configuration. Subsequent research will further explore the optimal distribution patterns for equivalent sources.
4. Simulation Case Analysis
The ribbed cylinder serves as a typical underwater target structure. Analyzing its radiation and propagation sound field in a range dependent waveguide is essential for underwater target recognition, noise assessment, and design. This study investigates the radiation and propagation sound field of a cylindrical shell in a shallow water waveguide with range dependent variations. The schematic of the cylindrical shell is shown in
Figure 7. The cylinder has a diameter of 1270 mm and a length of 3810 mm, with two internal compartments. Each compartment contains seven ribbed rings, each 12.7 mm thick and 50.8 mm wide. The shell thickness is 6.35 mm. The material properties include a Young’s modulus of
N/m
2, a Poisson’s ratio of 0.3, and a density of 2710 kg/m
3. The excitation force, applied at the center of the cylinder, is 10 N.
To ensure the accuracy of the input radiated sound field, the finite element modeling of the target is first described and analyzed. Triangular elements with a maximum element size of one-tenth of the acoustic wavelength discretize the target structure. Triangular elements with a maximum element size of one-sixth of the acoustic wavelength discretize the surrounding fluid domain. The perfectly matched layer (PML) consists of mapped elements with a maximum element size of one-sixth of the acoustic wavelength. Furthermore, grid convergence was verified by computing the result deviation for different element sizes relative to a reference mesh size of one-thirtieth of the acoustic wavelength; the results are presented in
Table 1. The comparison indicates minimal deviation within the given element size range, confirming sufficient convergence. The finite element meshing strategy employed in this study is verified.
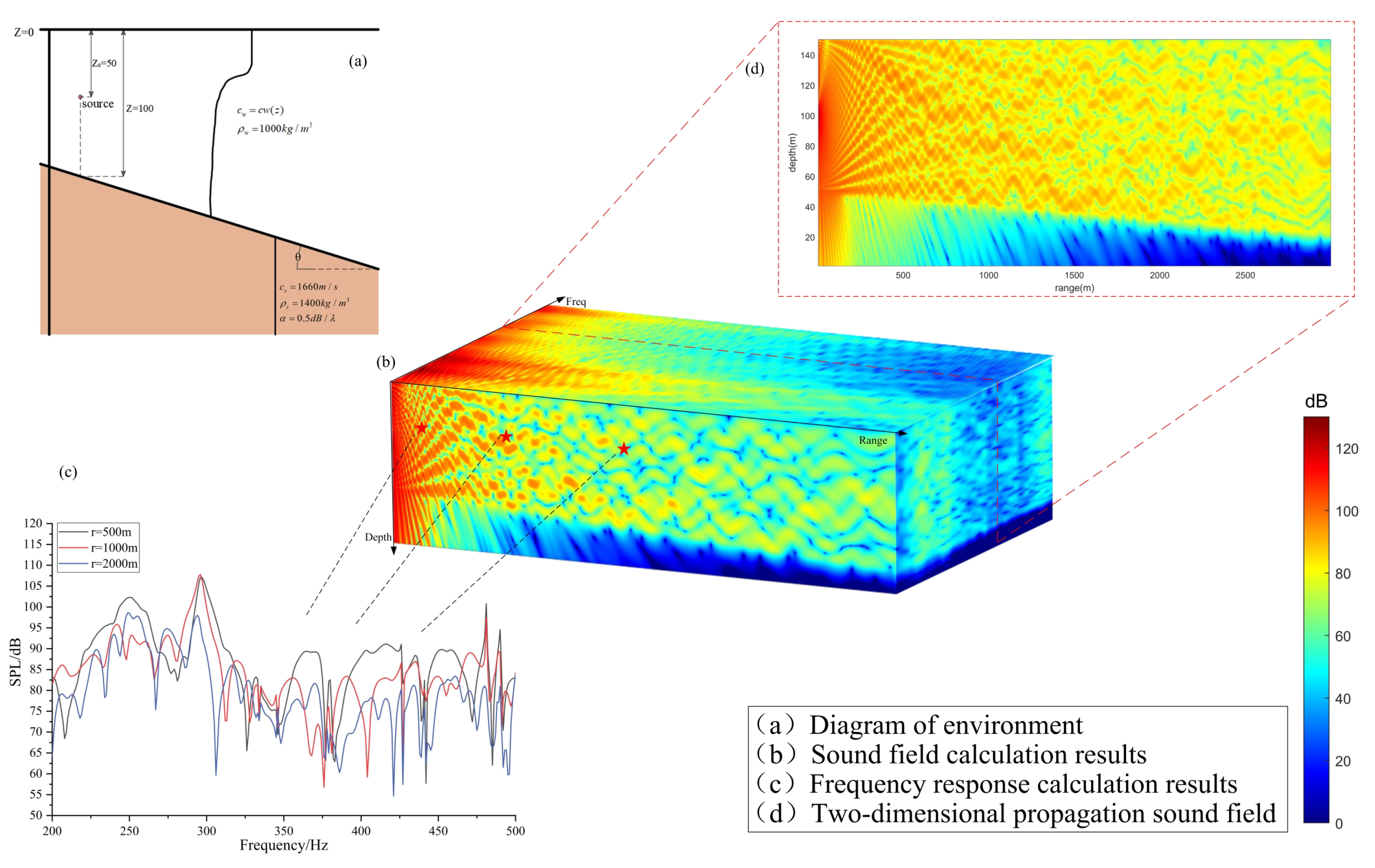
To analyze the effect of the waveguide environment on the radiation and propagation sound field, this paper calculates the sound field of the target using a wedge shaped waveguide as an example (see
Figure 8a). In the downward sloping wedge shaped waveguide, the depth of the cylindrical target structure is 50 m, while the water depth at the target location is 100 m. The water density is 1000 kg/m
3, and the sound speed decreases with depth in a step like manner (see
Figure 8a). The seabed sound speed is 1400 m/s, the seabed density is 1660 kg/m
3, the seabed attenuation is 0.5 dB/
, and the seabed slope is
.
The sound field results are shown in
Figure 8, where
Figure 8b presents the depth distance frequency results,
Figure 8c illustrates the frequency response at positions (50 m, 500 m), (50 m, 1000 m), and (50 m, 2000 m), and
Figure 8d provides the depth distance results at selected frequencies. From the energy distribution of the acoustic field in the wedge shaped waveguide environment, it is evident that during sound propagation, multiple reflections between the sea surface and seabed generate distinct interference patterns. As frequency increases, the interference structure of the acoustic field becomes more complex, accompanied by enhanced attenuation. Concurrently, the transmitted acoustic energy through the seabed and its attenuation exhibit an increasing trend. Analysis of the frequency response reveals that as propagation distance grows, the increased number of reflections between the sea surface and seabed introduces greater complexity to the frequency response curves. Furthermore, the characteristics of these curves differ significantly across varying propagation environments. Notably, comparisons of results at different distances and under different environmental conditions demonstrate that local extrema in the frequency response curves consistently correspond to the structural resonance frequencies of the target, such as 209 Hz, 251 Hz, 298 Hz, 378 Hz, and 428 Hz. This indicates that the acoustic field at resonance frequencies is predominantly governed by the target structure itself.
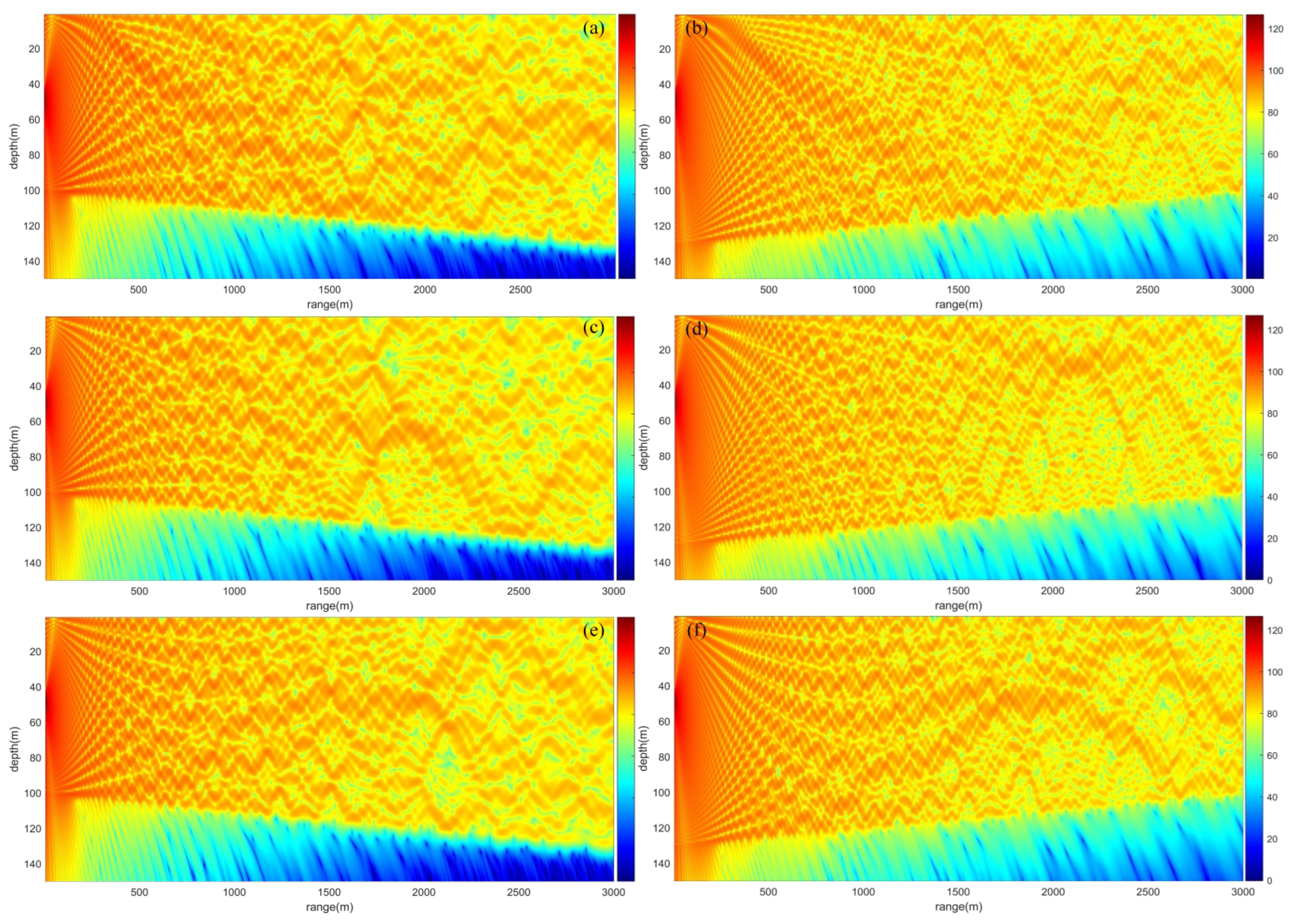
To further illustrate the impact of the waveguide environment on the radiation and propagation sound field, calculations were performed for two cases: a downward sloping wedge shaped waveguide and an upward sloping wedge shaped waveguide, each with different hydrological parameters. The sound speed profile of the water is shown in
Figure 9, where, in addition to the existing negative step layer, both negative and positive gradients are considered. For the seabed, a harder seabed is assumed, with a seabed sound speed of 1836 m/s, a seabed density of 2030 kg/m
3, and a seabed attenuation of 0.5 dB/
. Additionally, the case of a target located at a depth of 80 m is considered.
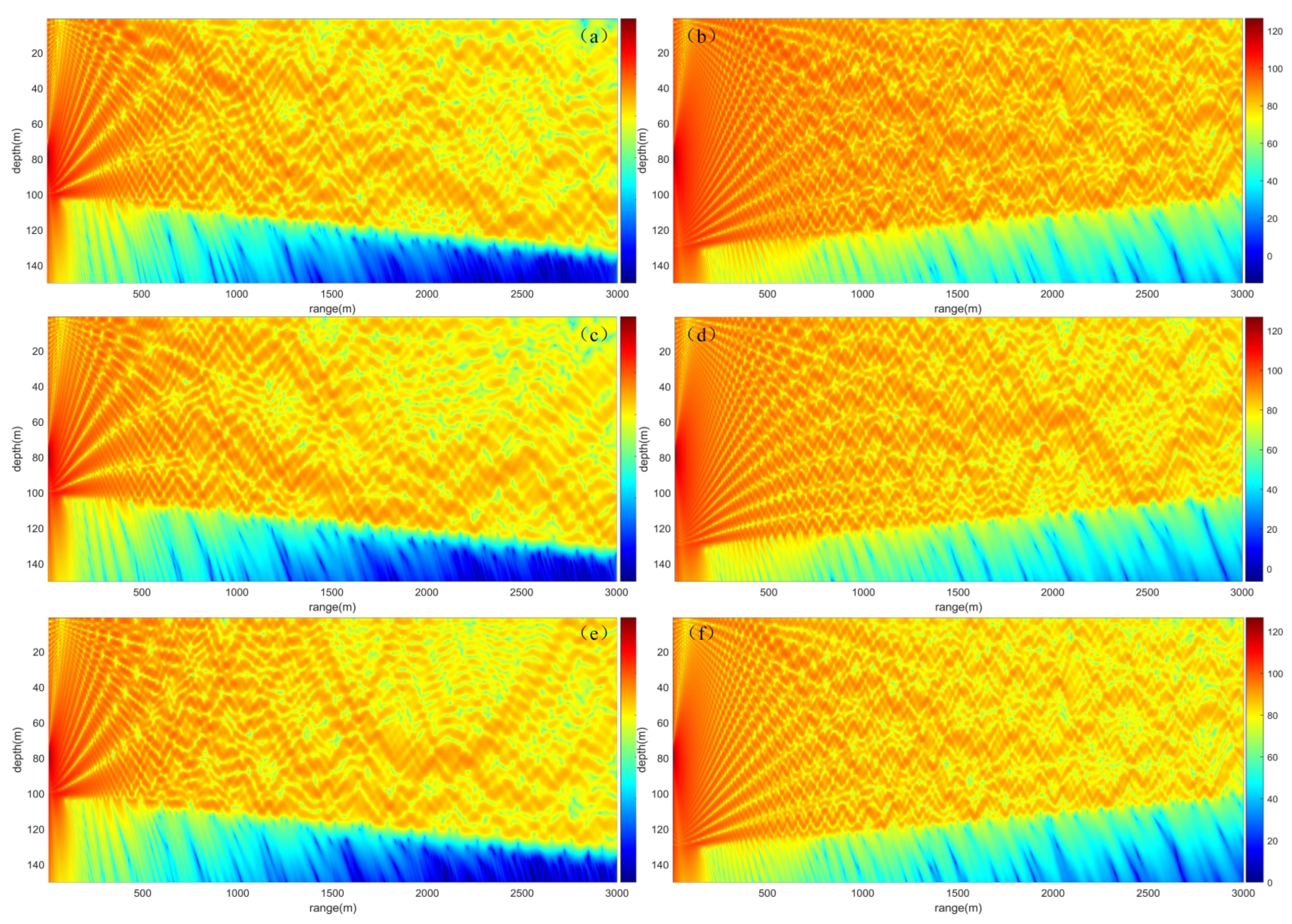
The acoustic field results at 500 Hz are shown in
Figure 10. First, comparisons are made between the results in upward sloping and downward sloping wedge waveguides. Drawing on theories of coupled normal mode and generalized ray theory, in upward sloping waveguides, the real part of each normal mode eigenvalue decreases as water depth shallows. The direction of the real part indicates the propagation direction of the acoustic field. Consequently, for upward sloping scenarios, generalized rays carrying acoustic energy deflect toward regions of increasing water depth. Simultaneously, due to reflections from the sea surface and seabed, as water depth decreases, the horizontal spacing of generalized rays at the same depth along the propagation direction reduces. This compression of acoustic energy during propagation results in denser interference structures. Analogously, for downward sloping waveguides, the real part of each normal mode eigenvalue increases with water depth, causing generalized rays to deflect toward deeper regions. As water depth increases, the horizontal spacing of generalized rays expands along the propagation direction at the same depth, leading to sparser acoustic energy distribution and less densely packed interference structures.
Further comparisons are conducted for acoustic fields under different sound speed profiles. Under identical seabed and sea surface boundary conditions, interference structures exhibit significant variations across sound speed profiles. Near field regions show minimal differences, but discrepancies amplify with propagation distance. Specifically, under negative thermocline conditions, acoustic rays deflect toward lower sound speed regions, causing pronounced downward shifts in interference structures. In contrast, regions with near isospeed profiles exhibit uniform interference patterns. Compared negative and positive gradient conditions, negative gradients induce gradual downward shifts in interference structures with propagation distance, while positive gradients drive upward shifts. In the downward sloping wedge waveguide, increasing water depth and larger sound speed gradients exacerbate structural shifts, whereas the upward sloping case, with decreasing water depth and smaller gradients, yields weaker shifts.
Moreover, results indicate near field consistency across all three sound speed profiles, but divergences emerge progressively with distance. Near field regions, with minimal horizontal seabed variations, show similar outcomes between waveguide types. However, far field regions exhibit marked differences due to sound speed profiles and environmental variations. Notably, upward shifts caused by positive gradients result in slightly higher sound pressure levels (SPL) compared to other profiles. In summary, near field acoustic propagation demonstrates low sensitivity to sound speed profiles, with field structures primarily governed by the target and boundary conditions. Consequently, many models simplify environmental assumptions in near field regions for computational efficiency. However, far field predictions necessitate explicit consideration of sound speed profiles and horizontal waveguide variations.
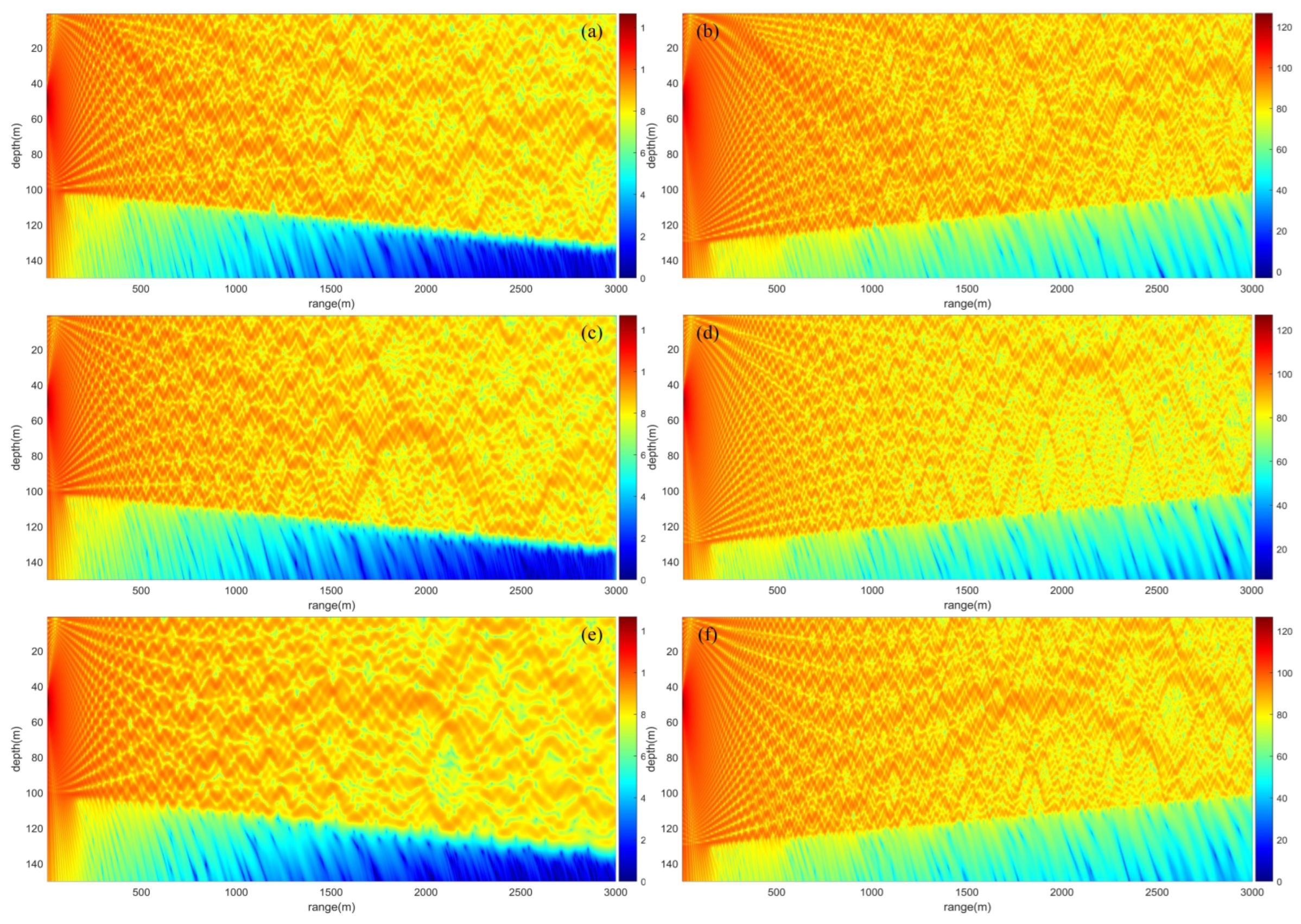
The computed acoustic field results under “hard seabed” conditions are shown in
Figure 11. In this scenario, the equivalent seabed reflection coefficient increases significantly, leading to a substantial reduction in acoustic energy transmitted into the seabed and a corresponding rise in energy retained within the waveguide. Consequently, interference structures in the acoustic field become sharper and more pronounced. Similar to soft seabed conditions, sound speed profile induced shifts in interference structures remain observable. Further analyses examine the influence of seabed density, sound speed, and attenuation coefficient on the acoustic field. Results indicate that seabed sound speed and density exert significantly greater impacts on sound propagation than attenuation. In near field regions, acoustic propagation shows insensitivity to seabed attenuation, with consistent results across varying attenuation values. In far field regions, despite similar distribution trends, amplitude differences at specific distances become evident. This suggests that seabed attenuation has a relatively minor overall influence, primarily correlating with propagation distance and frequency effects intensify with longer distances and higher frequencies.
Beyond waveguide conditions, target depth also significantly impacts acoustic radiation and propagation characteristics. Additional analyses compare acoustic fields for varying target depths. For instance,
Figure 12 presents results for a target depth of 80 m. When the target is deeper, seabed reflected fields strengthen markedly, with interference structures dominated by direct and seabed reflected paths. Transmitted energy into the seabed also increases. These results demonstrate distinct interference patterns across target depths, where depth influences both direct and reflected fields, with reflections playing a more dominant role. Notably, sound speed profile induced interference shifts persist, but energy concentrates predominantly in the lower half of the water column. Analysis of sound pressure level variations with propagation distance reveals that under positive gradient conditions, sound pressure level no longer exceeds results from negative thermocline or gradient scenarios. This phenomenon becomes more pronounced in downward sloping waveguides, where water depth increases with propagation distance.
Through comparative analyses of varying environmental parameters and target depths, it is evident that acoustic field structures exhibit marked differences under different acoustic environments and target conditions. Among these factors, range dependent waveguide environments and water column sound speed profiles emerge as primary determinants of interference structure characteristics, followed by seabed geological types. Additionally, target depth significantly influences acoustic field outcomes, particularly under specific waveguide environments and seabed parameters, where it markedly alters the properties of seabed reflected fields. Sensitivity to environmental parameters also varies with propagation distance. In near field regions, the water column sound speed profile, seabed attenuation coefficient, and seabed density exert relatively minor impacts on the acoustic field. To enhance computational efficiency, selective omission of certain parameters may be justified. However, in far field regions, the influence of all parameters becomes non negligible. To ensure sufficient accuracy, the combined effects of these parameters must be comprehensively considered.
5. Experimental Application Analysis
This subsection verifies the model through marine experimental data. Our research group conducted sea test in the South China Sea. Field measurements of target-radiated sound fields during sea trials present inherent challenges, particularly in accurately characterizing acoustic emissions from volumetric sources. To address this limitation, a controlled methodology was implemented: transducer-generated simulated radiation signals were transmitted, with the acoustic spectra acquired by monitoring hydrophone serving as equivalent source inputs, enabling focused verification of the Model.
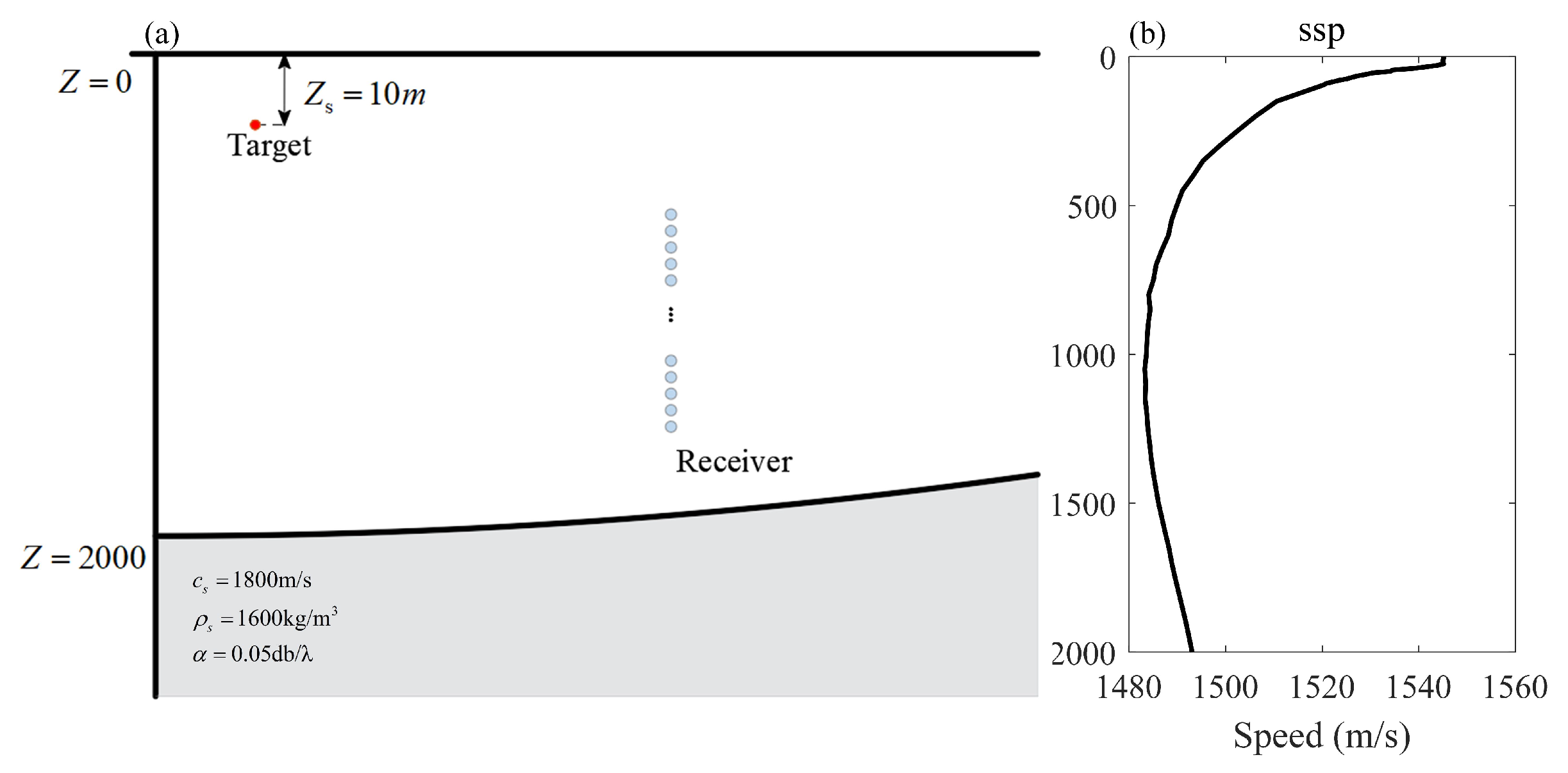
Figure 13 illustrates the bathymetric configuration of the test region and associated hydrographic parameters. During the test, a 10 m-deep sound source and a vertical receiving array were deployed. The sound speed profile is shown in
Figure 13b, with the seabed featuring a gentle slope reaching 2000 m maximum depth. Seabed parameters were inverted from transmission data with values:
m/s,
m/s,
= 0.5 dB/
.
The model verification process is divided into the following key steps: Obtain the spectral characteristics of the target radiated source, denoted as , which includes both continuous and discrete spectral components. Based on , the frequency range for the sound field calculation can be determined. In the field tests, the signal collected by the listening devices is processed and used as the source spectrum; Obtain the required parameters for the computational model from the field tests. These parameters are then incorporated into the modal equivalent source model developed in this paper to compute the channel response; Compute the predicted results after channel propagation. The model calculates the sound field response (in the frequency domain) from the sound source to the receiver, denoted as , and couples this with the target’s radiated source characteristics to predict the target’s radiated sound spectral features; The predicted results are compared with the measured target radiated sound spectral features at the receiver points to verify the model.
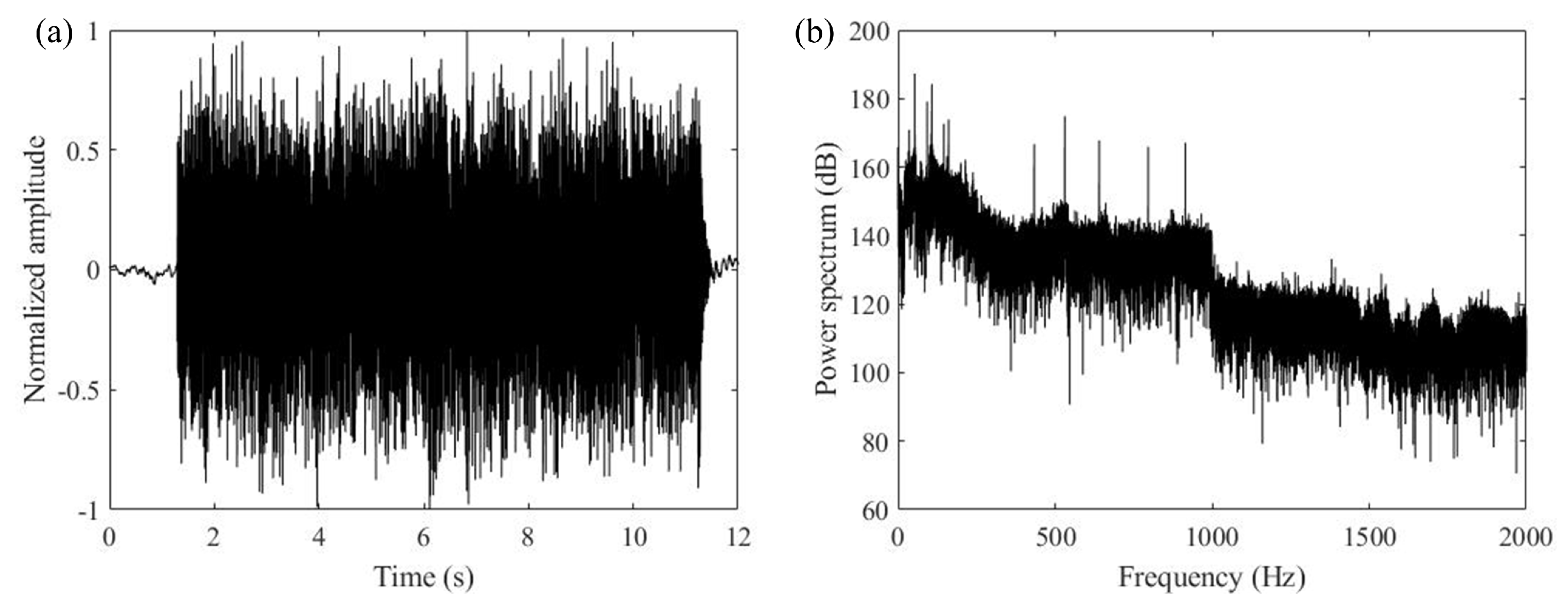
The first step is the acquisition of the source spectrum. The waveform and frequency spectrum characteristics of the signals obtained through listening during the field tests are shown in
Figure 14.
The experiment primarily aims to verify the spectral characteristics of the target’s radiated noise. Therefore, the test data must be processed through power spectral estimation to obtain the spectral levels of the target’s radiated sound, including both the line spectrum intensity and continuous spectrum level. The periodogram method is employed to calculate the power spectrum of the target’s radiated signal, following the steps outlined below. First, the data signals are processed using FFT, and then the signal power density within the specified bandwidth
is calculated,
where,
and
represent the lower and upper frequency limits of the bandwidth, respectively. For the continuous spectrum signal of the radiated noise,
and
correspond to the bandwidth range of 1/3 octave. Finally, the power spectral level of the target’s radiated sound is calculated using the following formula,
In the formula, M represents the sensitivity of the hydrophone. Similarly, the power spectrum of the signal received by the hydrophone is calculated using the same formula. Next, the channel transfer function is determined by combining the obtained waveguide environment parameters and positioning parameters. The predicted received signal power spectrum is then calculated by applying the power spectrum of the transmitted signal. Finally, the predicted power spectrum is compared to the actual received signal power spectrum.
The calculation results for some receiver points are shown in
Figure 15. Specifically,
Figure 15(a-1–a-3) represent the first position, located 4494 m from the sound source;
Figure 15(b-1–b-3) represent the second position, 3069 m from the sound source; and
Figure 15(c-1–c-3) represent the third position, 960 m from the sound source. The receiver depths for these positions are 605 m, 995 m, and 1295 m, respectively. The results indicate that the average errors at the three positions are 4.27 dB, 3.53 dB, and 3.59 dB, with average correlation coefficients exceeding 0.9, suggesting a high degree of agreement between the model’s calculated results and the actual received results. The primary source of model error arises from discrepancies between the actual experimental environment and the parameters used in the model’s calculations, including unknown variations in the underwater environment, offsets in the transmitting and receiving positions, and equipment precision. Furthermore, the results indicate that the calculation error for line spectra is significantly higher than that for continuous spectra. This discrepancy is attributed to the propagation characteristics of line spectrum signals and the methods employed in signal processing. In practical ocean engineering applications, analyzing line spectrum signals requires more precise waveguide environmental information. Additionally, such analysis is complicated by interference from ocean ambient noise, making it more challenging. This section primarily verifies the effectiveness of the acoustic field modeling calculations; the overall trend of the calculated results remains consistent with actual received data. These findings demonstrate that the model developed in this paper effectively verifies field test data, showing high reliability and effectiveness.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}