1. Introduction
In recent years, the resource constraints in nearshore waters and environmental pollution issues have spurred the demand for large-scale development of deep-sea aquaculture [
1,
2]. Driven by global energy transition strategies and blue economy initiatives, the integrated development of offshore floating wind power and deep-sea aquaculture has emerged as a cutting-edge direction for comprehensive marine resource utilization [
3]. This composite structure enhances resource utilization efficiency through shared mooring facilities and optimized spatial allocation of marine areas, while simultaneously reducing operational cost [
4,
5,
6]. It is demonstrated that border marine space and superior water quality condition in deep-sea region could be crucial to increase the production of healthy fish [
7,
8]. Therefore, these environmental advantages concurrently are beneficial to lower disease incidence rates in fish populations and to decrease feed wastage [
9,
10]. Germany was the first to conduct small-scale algae cultivation experiments in the North Sea wind farm as early as 1990. However, due to technical limitations, the early grid system was insufficient in strength under harsh sea conditions [
11,
12]. Furthermore, in 2016, South Korea initiated the construction of its first large-scale offshore wind farm integrated with seaweed and shellfish cultivation off its southeastern coast. This project aimed to develop a tension leg platform (TLP) combined with a seaweed cultivation system [
13]. The semi-submersible platform to be put into operation in Fujian, China in 2024 marks the birth of the world’s first commercialized wind-fish integration project, innovatively achieving the integrated integration of the wind turbine foundation and the cage aquaculture system.
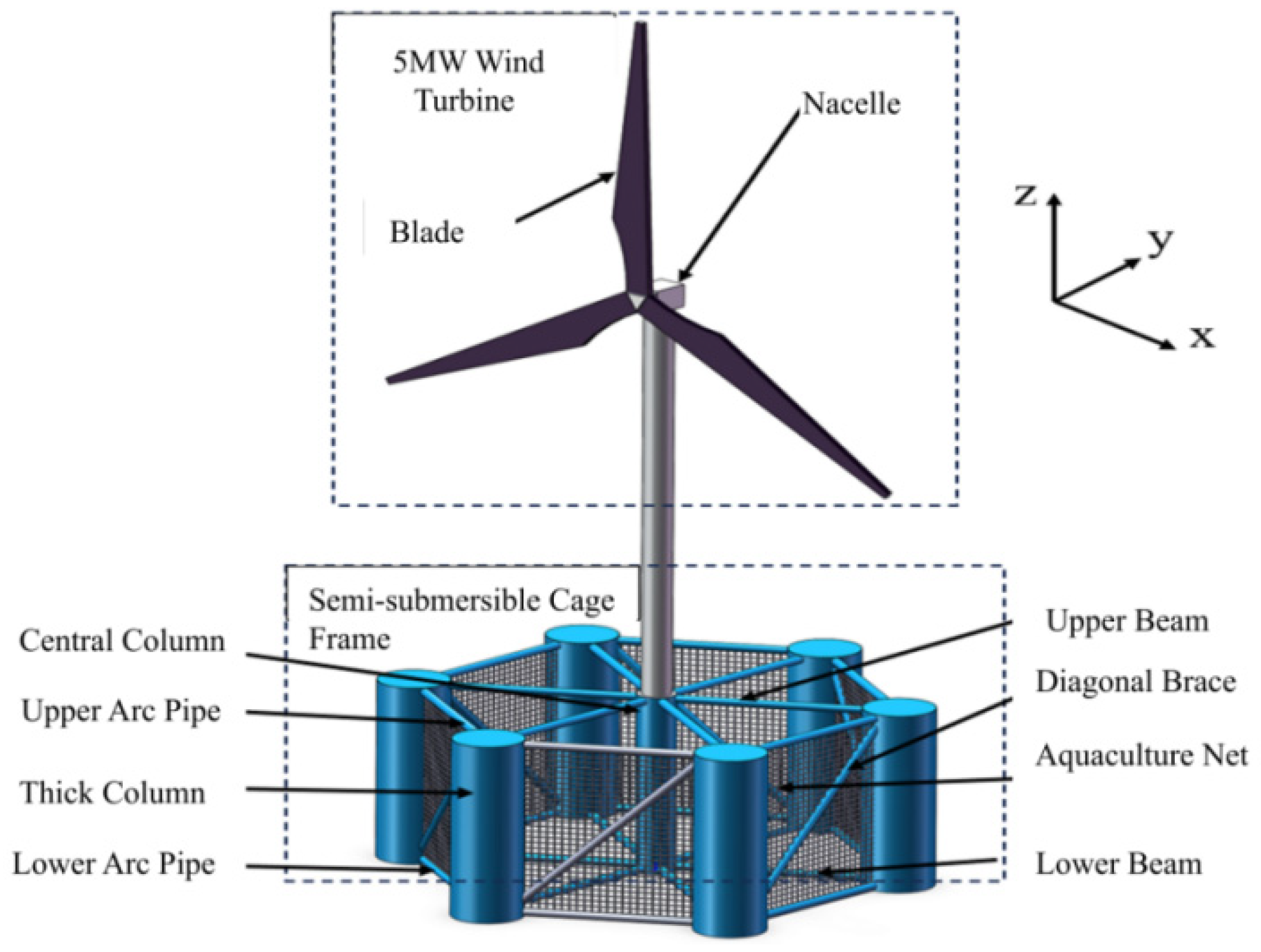
The semi-submersible offshore aquaculture platform as an emerging technological approach has garnered significant attention due to its superior wave resistance capabilities [
1,
2]. Its fundamental configuration typically comprises a main platform, aquaculture cage systems, mooring systems and associated auxiliary facilities [
14]. Through rational structural design, such platforms can not only maintain stability under extreme marine conditions but also achieve efficient fishery production [
2]. Therefore, a plenty of scholars have proposed various innovative solutions for system design level of this platforms. Zhang et al. employed a fully coupled aero-hydro-elastic-servo-mooring dynamics model to evaluate the synergistic effects between steel aquaculture cages and floating wind turbines of FOWT-AC system [
15]. It was shown that the integrated FOWT-AC system exhibited excellent anti-overturning capability under the selected wind-wave combined conditions. In addition, better motion response characteristics and higher stability could be found in the optimized semi-submersible platforms made of porous shell structures, significant performance improvements in pitch and heave degrees of freedom could also be observed by Yao et al. [
16]. Simultaneously, the WindFloat-type floating offshore wind turbine mooring system designed for 60 m water depth exhibited satisfactory performance under various wind-wave combination conditions, applied loading on the wind turbine tower and tension on the mooring line remained in a proper range by Gao et al. [
17].
The selection of numerical models and theoretical methods exerts significant influence on the structural response and fatigue life assessment of floating wind turbines. Han et al. demonstrated that Morison equation was more suitable for low-frequency resonance capture, while potential flow theory was more applicable in high frequency response prediction [
18]. Through systematic simulations encompassing respectively regular waves, irregular waves and combined wind-wave interactions, Han et al. established that potential flow theory achieves higher accuracy in heave response predictions, whereas certain deviation still existed in bending moment calculations at tower base [
18]. Gong et al. revealed that vortex-induced vibrations may trigger large-scale bending mode vibrations within specific wind speed ranges, whereas the possibility of significant vibration in the rigid body mode was relatively lower by using a rigid-flexible coupling dynamic model based on Lagrange equations [
19]. Regarding innovations in numerical simulation methodologies, a coupled finite element-Morison model had successfully quantified hydrodynamic response deviations in net cage structures by Ma et al. [
20,
21]. This integrated approach not only enabled error quantified but also deeply studied the effect of environmental factors and net cage parameters on the performance of net cage structures [
22]. The Response amplitude operators (RAO) and acceleration response spectra of WindFloat-type platforms were meticulously measured and validated by comparing with benchmark models [
23]. Such investigations provide reliable data support for the design of future floating wind turbine. Furthermore, Robertson A.N. et al. conducted comprehensive validation of the OC4-DeepCwind platform model using FAST software by systematically comparing computational extreme loads and fatigue loads derived from eight distinct wave-only and combined wind-wave test scenarios against experimental data from testing model at scale ratio of 1:50 [
24]. Calibration procedures were rigorously implemented under wind-only, and wave-only operational conditions to validate the model. Concurrently, extreme weather conditions including intense winds, colossal waves, and rapid currents impose increase demands on the stability and durability of aquaculture infrastructure by Huang et al. [
25] and Kristiansen et al. [
26]. According to physical model tests, when aquaculture net panels extend above the water surface, the wave-induced loads acting on the emerged net structures are 200% greater than those on fully submerged counterparts, a phenomenon primarily attributed to water jet effects during wave-structure interactions by Chen et al. [
27]. Therefore, the design process should thoroughly account for the coupled effects of numerical modeling methodologies and structural net configuration design on the dynamic response characteristics and hydrodynamic stability performance of paltforms.
The stability issue of aquaculture facilities in strong current environments has persistently been a significant research challenge. DeCew et al. revealed that net solidity is a key parameter to determine submergence depth of small-sized fish cages [
28]. As current velocity increased, the system could undergo a transitional process from a floating state to an unstable submerged state. Furthermore, biofouling had been considered as a pivotal challenge to restrict the long-term operation of marine ranching infrastructure by Li et al. and Liu et al. [
29,
30]. Bi et al. indicated that biological communities adhering to net surface areas could induce substantial alterations in hydrodynamic characteristics of aquaculture facilities, potentially increasing drag forces to over tenfold greater than their original values [
31]. Moreover, biological fouling can lead to a significant increase in the drag coefficient of the cage, up to 240% of the clean state at most, among which the growth of sea anemone organisms is particularly obvious according to Swift et al. and Nobakht-Kolur et al. [
32,
33]. Nobakht-Kolur et al. also further found that biological fouling did not only increase the flow velocity gradient in the local area, but also led to an intensification of wave height attenuation in the downstream area [
33].
As a key component of fish farms, fluid-structure coupling effect of the net cage structure directly affected the strength of the main structure. Chen et al. found that higher current velocities significantly amplified the effects of net presence, which could lead to an increase in leg column stress and truss utilization rate of cage structures [
34]. Mechanical characteristics and deformation of flexible circular net structures under diverse steady-state flow velocities were systematically investigated. When additional weight at the bottom was different, overall force and deformation of the net cage structure existed significant differences. Three different sizes of bottom counterweights were adopted in the experiments. Lader and Enerhaug concluded that the size of the counterweights directly affects the stiffness and stability of the net structure [
35]. To evaluate the dynamic behavior of flexible network structures more accurately, a variety of numerical simulation methods were also proposed. Among them, a commonly used method was to regard the grid as a porous medium and simulated it in combination with Computational Fluid Dynamics (CFD). This method could not only capture the complex flow field characteristics, but also effectively predicted the force conditions of downstream structures according to Cheng et al. [
36]. In addition to its own material properties, the external flow environment is also one of the key factors determining the mechanical behaviors of the network structure. Fan et al. thought that both wave forces and tidal currents could cause significant displacements and deformations in the net structure, therefore, utilization rate of aquaculture space was reduced and health of organisms was threaten [
37]. Especially under the conditions of strong winds or rapid currents, net structures could suffer irreversible damage, seriously affecting the safety of the aquaculture system. Therefore, an appropriate net structure should be selected with the aim of maintaining the structural stability and service life. In this paper, a numerical method to simplify the net cage structures is validated by comparing numerical modelling and existing experimental results and then a novel integrated foundation structure of floating wind turbine and net cage with catenary and taut mooring systems is proposed. Finally, this study focuses on the effect of biological fouling on integrated net cage foundation and safety performance of mooring lines.
4. Conclusions
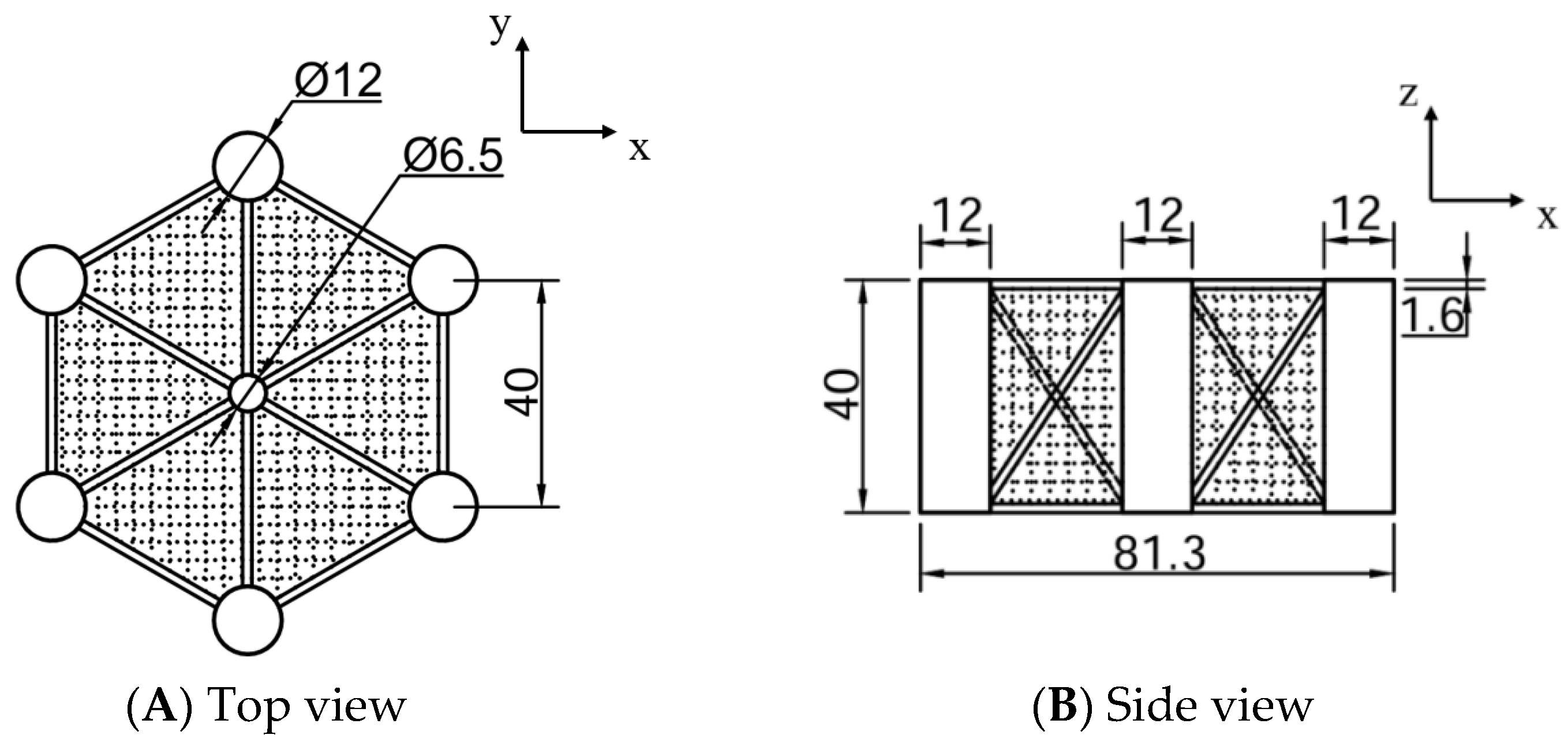
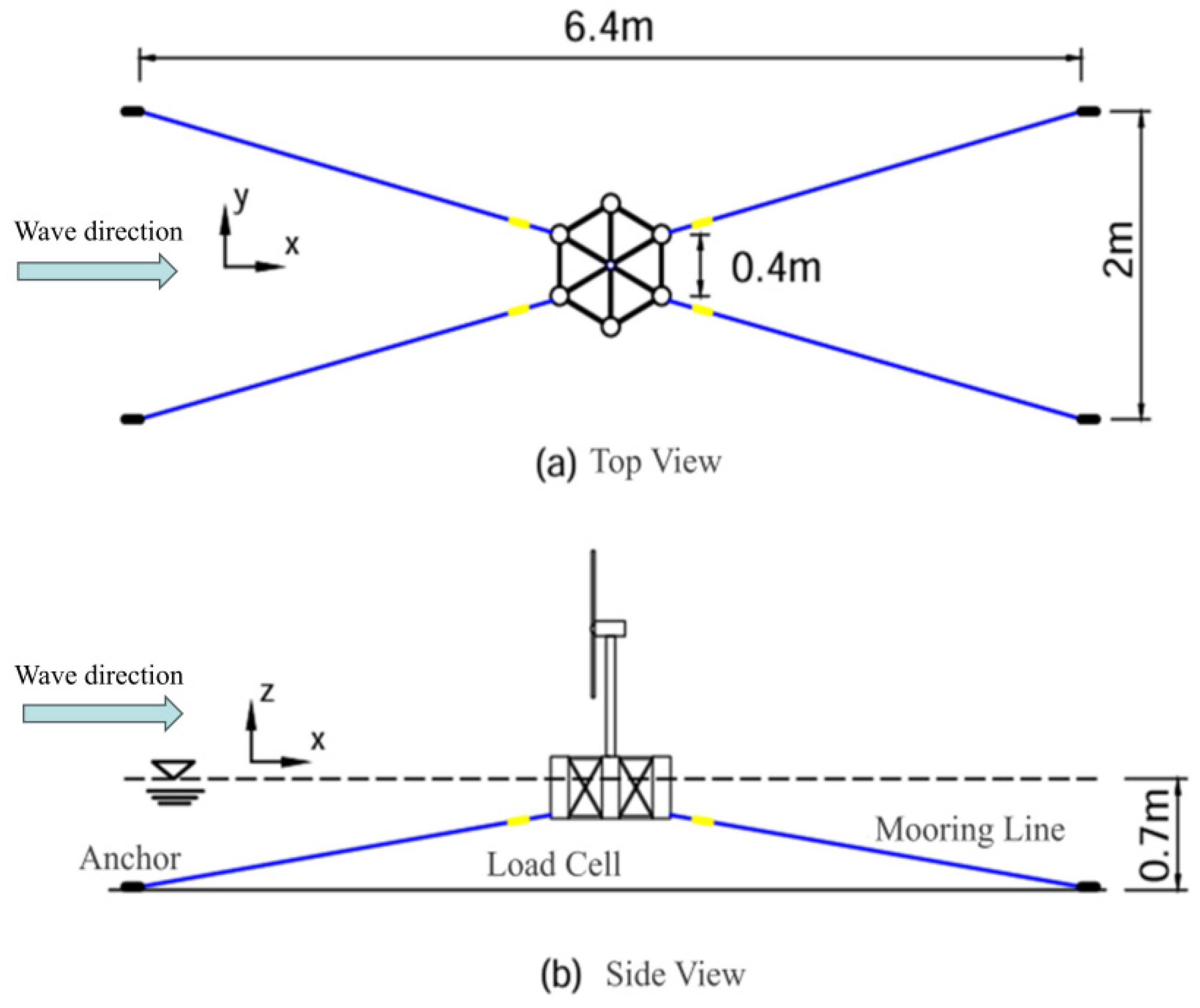
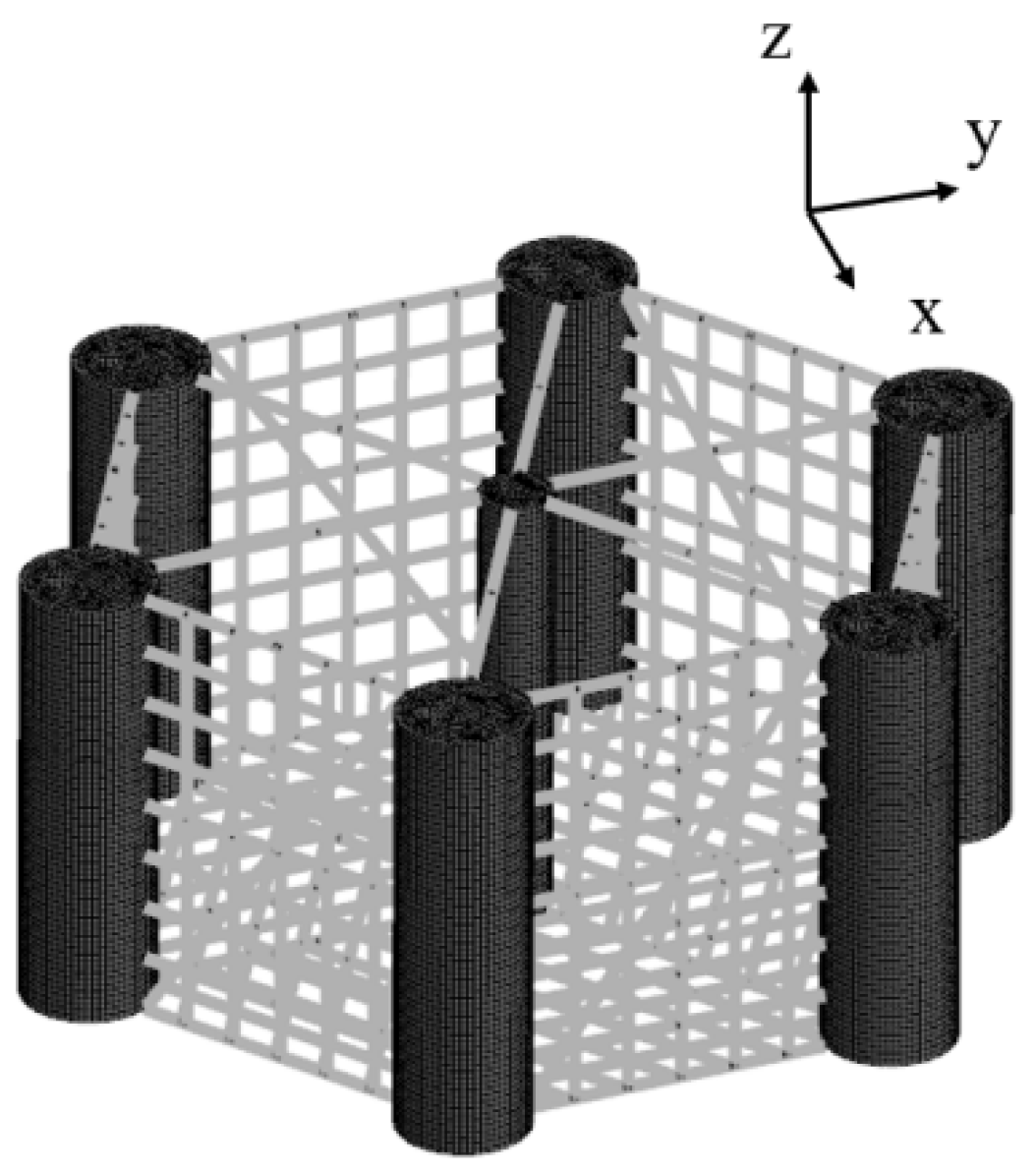
This study introduces a novel integrated foundation structure combining a 22 MW wind turbine semi-submersible platform with an aquaculture cage and focuses on the impact of biological adhesion on the net cage structure and the mooring system during the farming process. Firstly, experimental models were used to verify the appropriateness of equivalent volume method. Then, this paper compares the safety factor variations of catenary and taut mooring systems under different sea conditions. Finally, time-domain analysis was employed to obtain motion and mooring tension responses under various ratios of biological adhesion of net cage structures and mooring lines for both mooring methods. Some conclusions have been obtained.
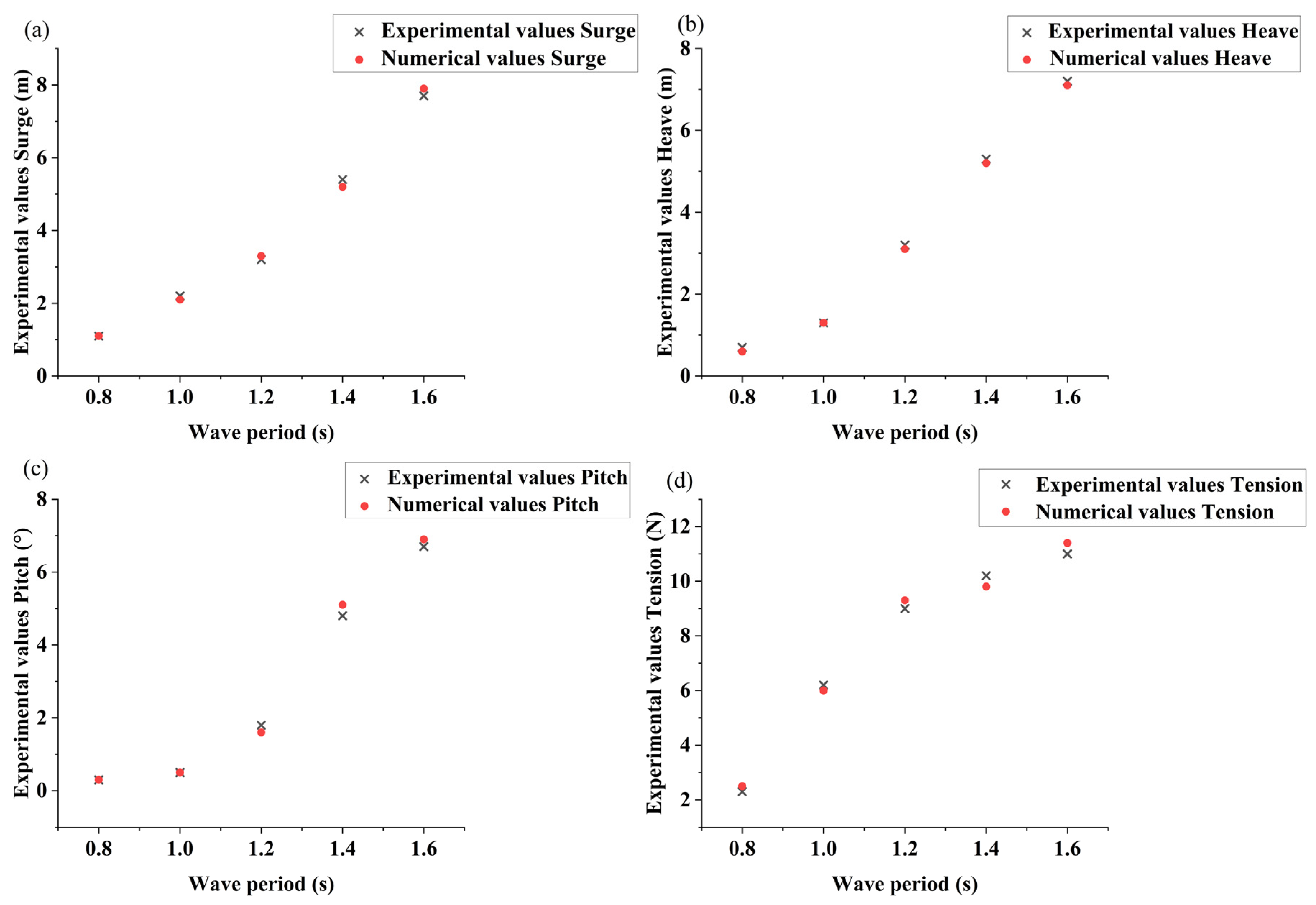
The equivalent volume method was applied to simulate existing experimental models. Structural surge, heave, pitch, and tension of the anchor chain on the wave-facing side were compared with existing experimental results. It could be concuded that the values obtained by using the equivalent volume method are clode to the experimental results.
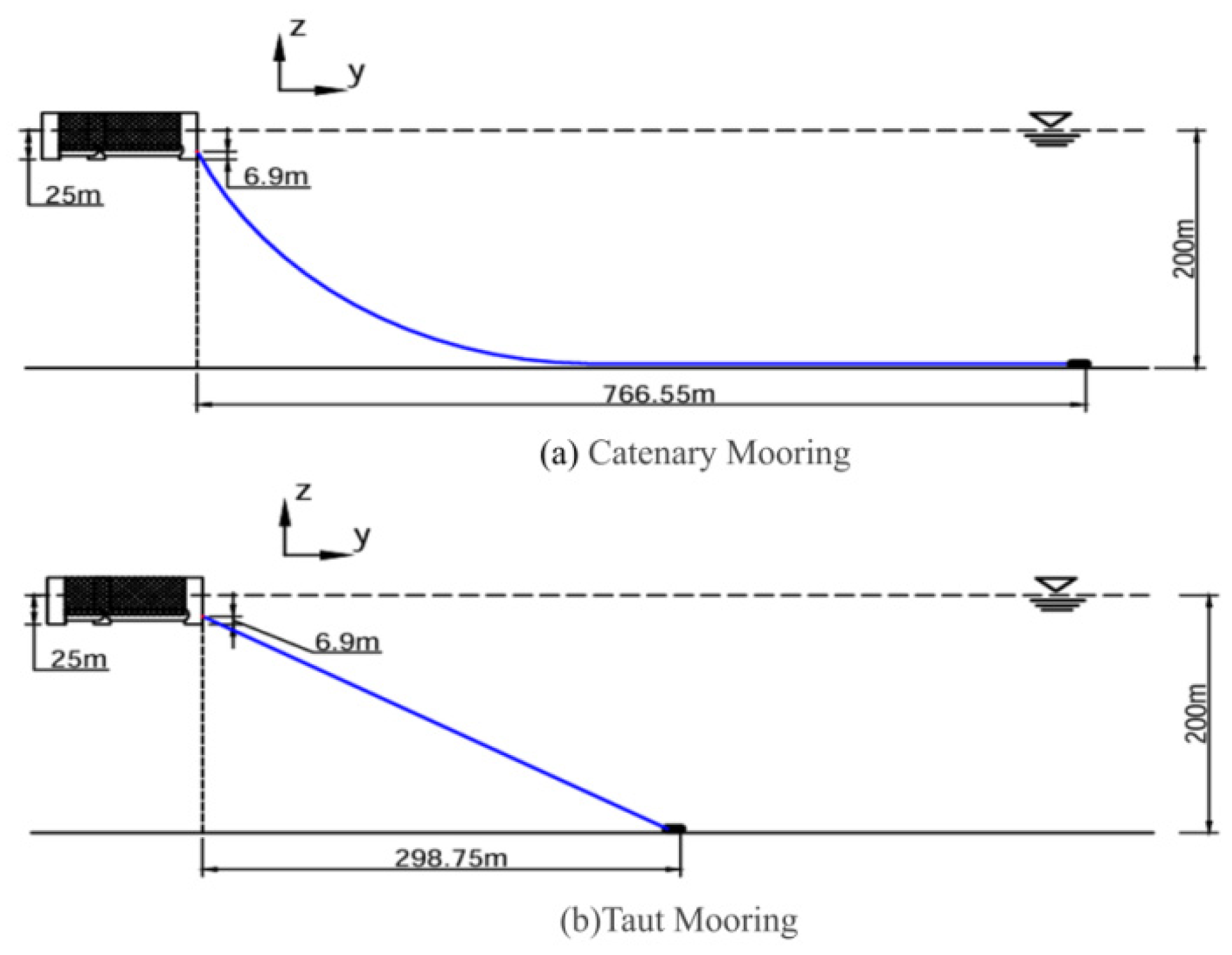
For the South China Sea with a water depth of 200 m, the taut mooring outperforms the catenary mooring system in terms of sway performance. Its maximum sway displacement is much lower than the 40 m recommended by the specification, while that of catenary mooring is only slightly lower than 40 m. For the tension of mooring lines, safety factor of Line 3 is 2.62 for the taut mooring system and that is 4.25 for the catenary mooring system greater than the regulatory requirement of 1.67. Two mooring design meet the safety requirements, however, the catenary mooring system has an advantage of safety factor, while the taut mooring system save cost in material use due to its use in shorter mooring lines.
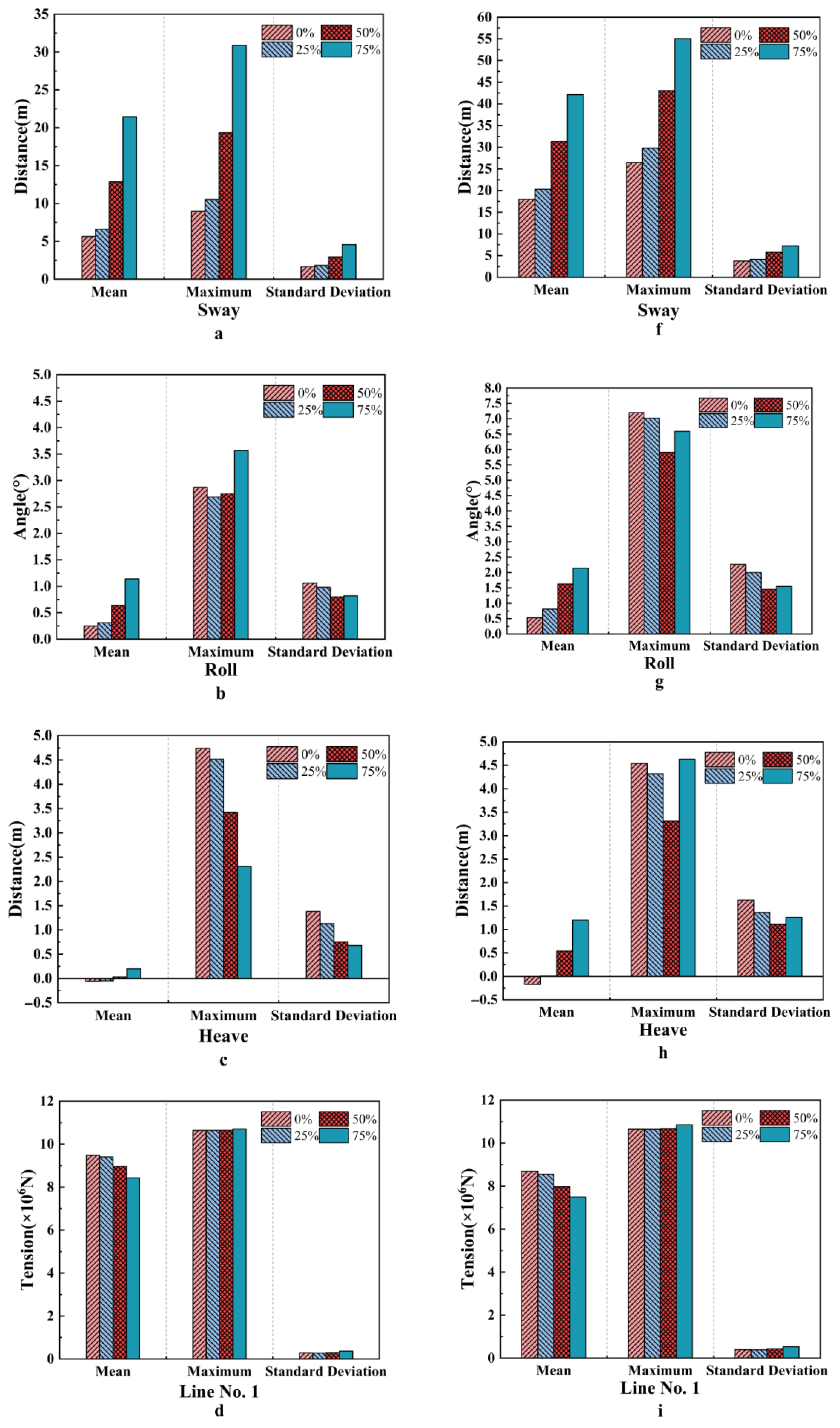
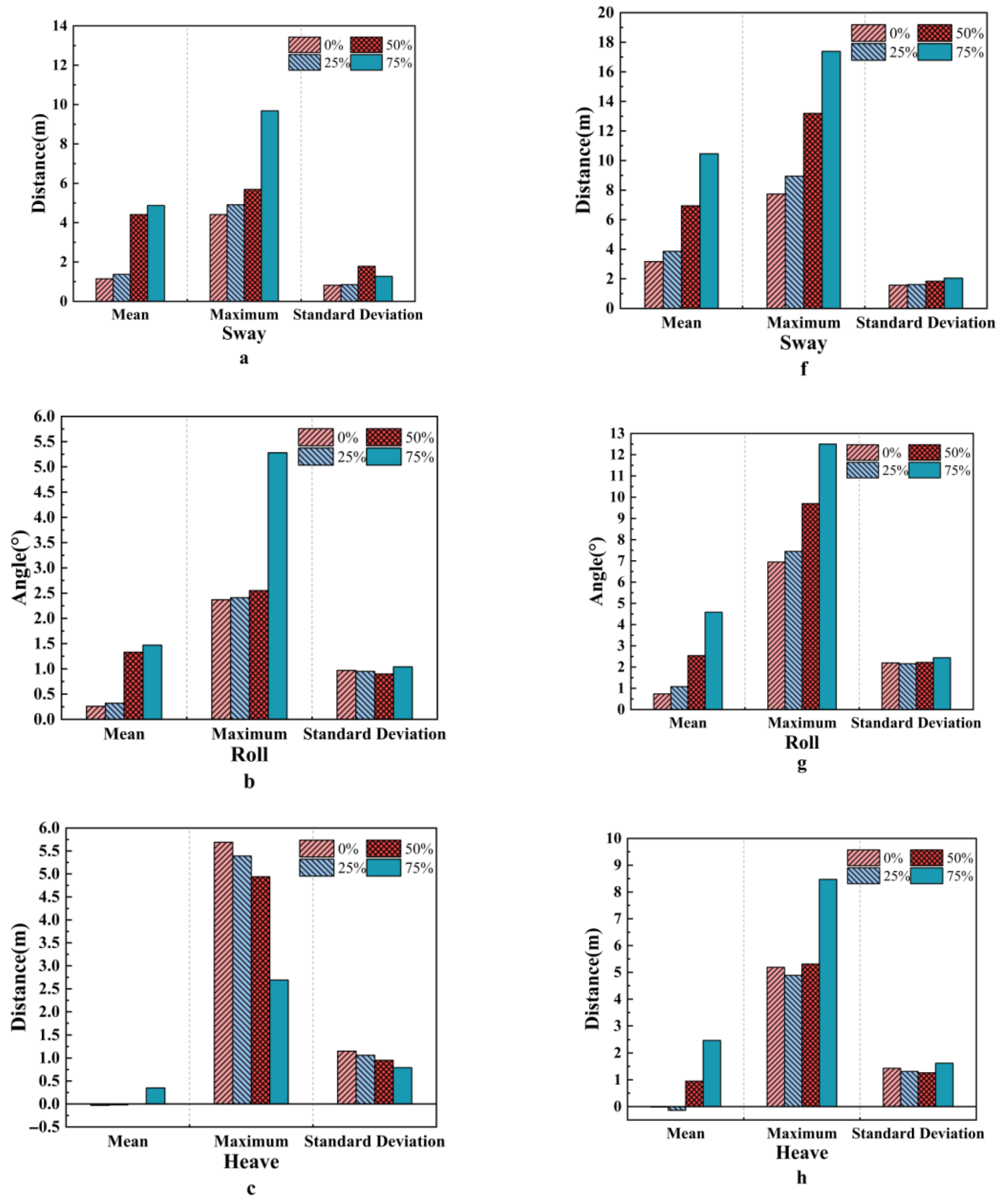
As the ratios of biological adhesion on the net cage increases, both mean and maximum displacements in the sway motion show an increasing trend. For the case in 75% of biological adhesion, sway displacements under the catenary mooring configuration in both sea conditions do not meet the requirement of specification. However, the sway displacements in both sea conditions meet the requirements for the taut mooring configuration. In the survival sea condition for the case in 75% of biological adhesion, the safety factors of Line 3 for both mooring methods fail to meet the regulatory requirements. Therefore, it should be cleaned regularly of the net cages and mooring cables to reduce the safety impact of biological adhesion on the integrated foundation of net cage structure and mooring lines under the case in over 50% of biological adhesion.
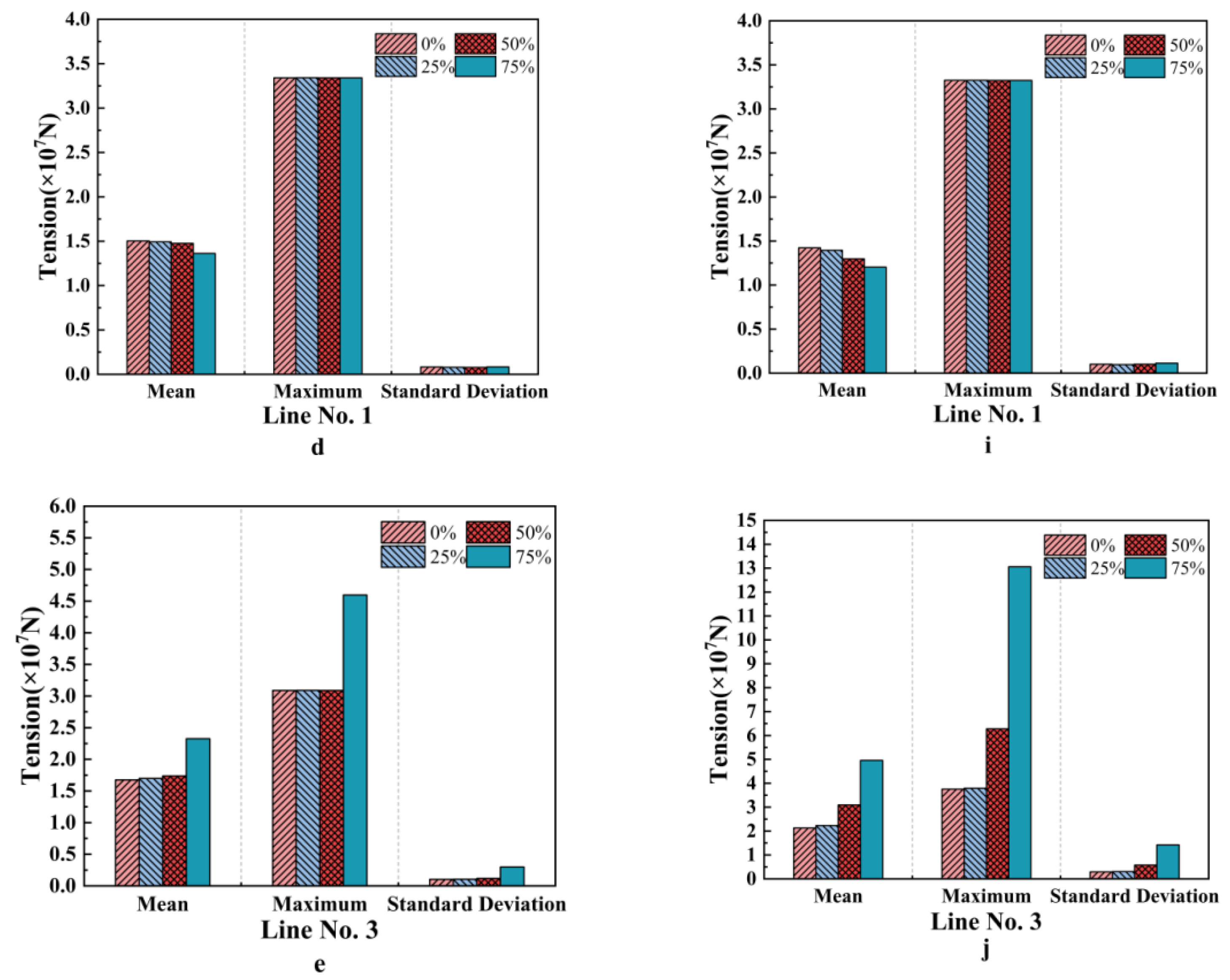
In both mooring configurations, biofouling on the mooring lines significantly increases the amplitude of sway motion, the increase in the amplitude of sway motion becomes more and more obvious with the increase of biofouling adhesion rate. Damping effect of biofouling adhesion on the roll and heave motion could be found. Effect of biofouling adhesion on the tension and safety of the mooring lines could be obvious, especially for the Line 3 with greater tension. Minimum safety factors of catenary and taut mooring are 4.24 and 3.07 respectively, both of which meet the requirements of the specifications.
In this paper, the limitations of this study are: (1) This study does not take into account the strength and deformation analysis of the integrated foundation of the wind turbine net cage caused by external loads. (2) As the determination of the drag force coefficient of Morrison bars can rely on more precise experiments rather than empirical formulas, the equivalent method of biological adhesion in this study can be further improved.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}