
Characterization of the Internal and External Flow Field of a Semi-Submersible Aquaculture Platform with Multiple Net Cage Configuration


Abstract
1. Introduction
2. Numerical Model
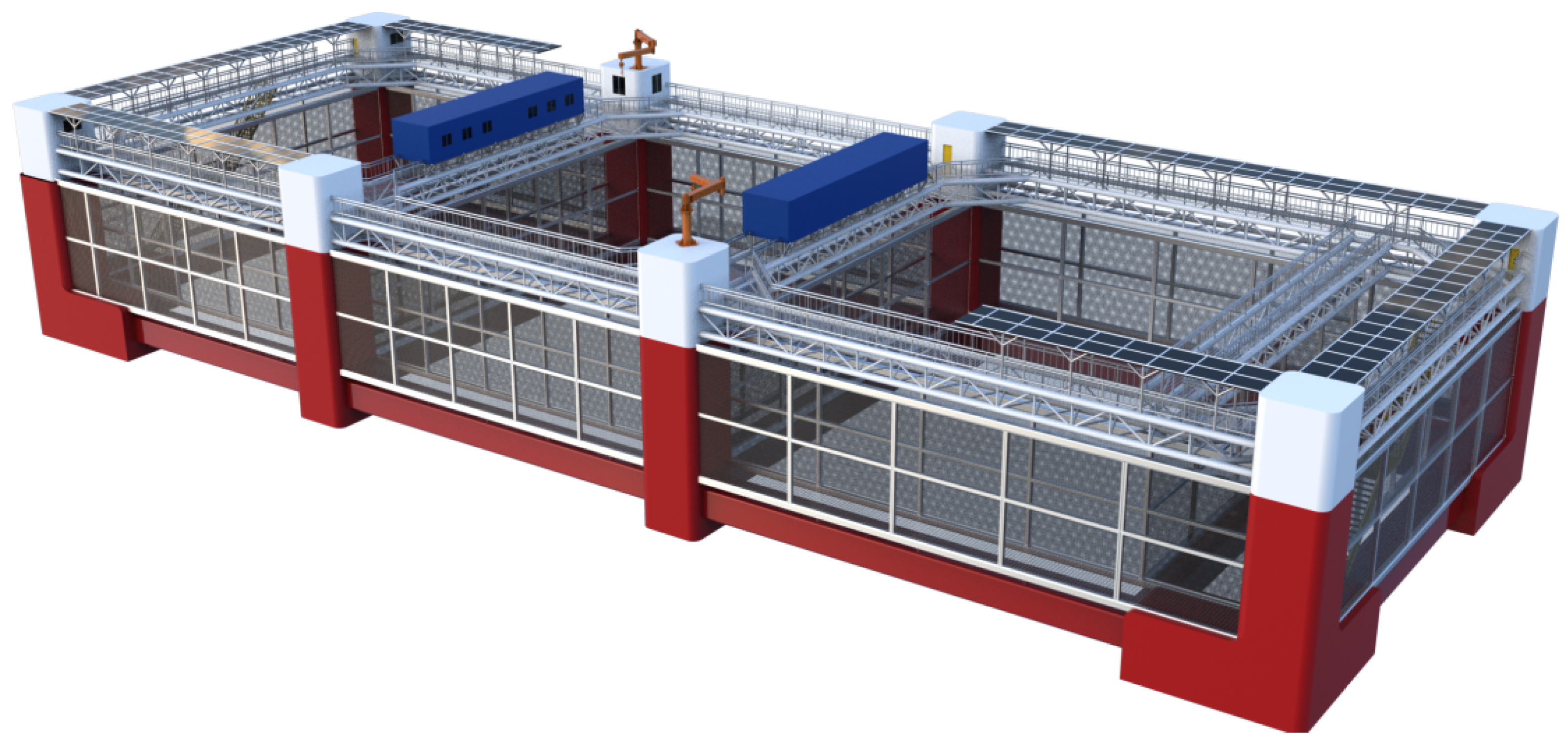
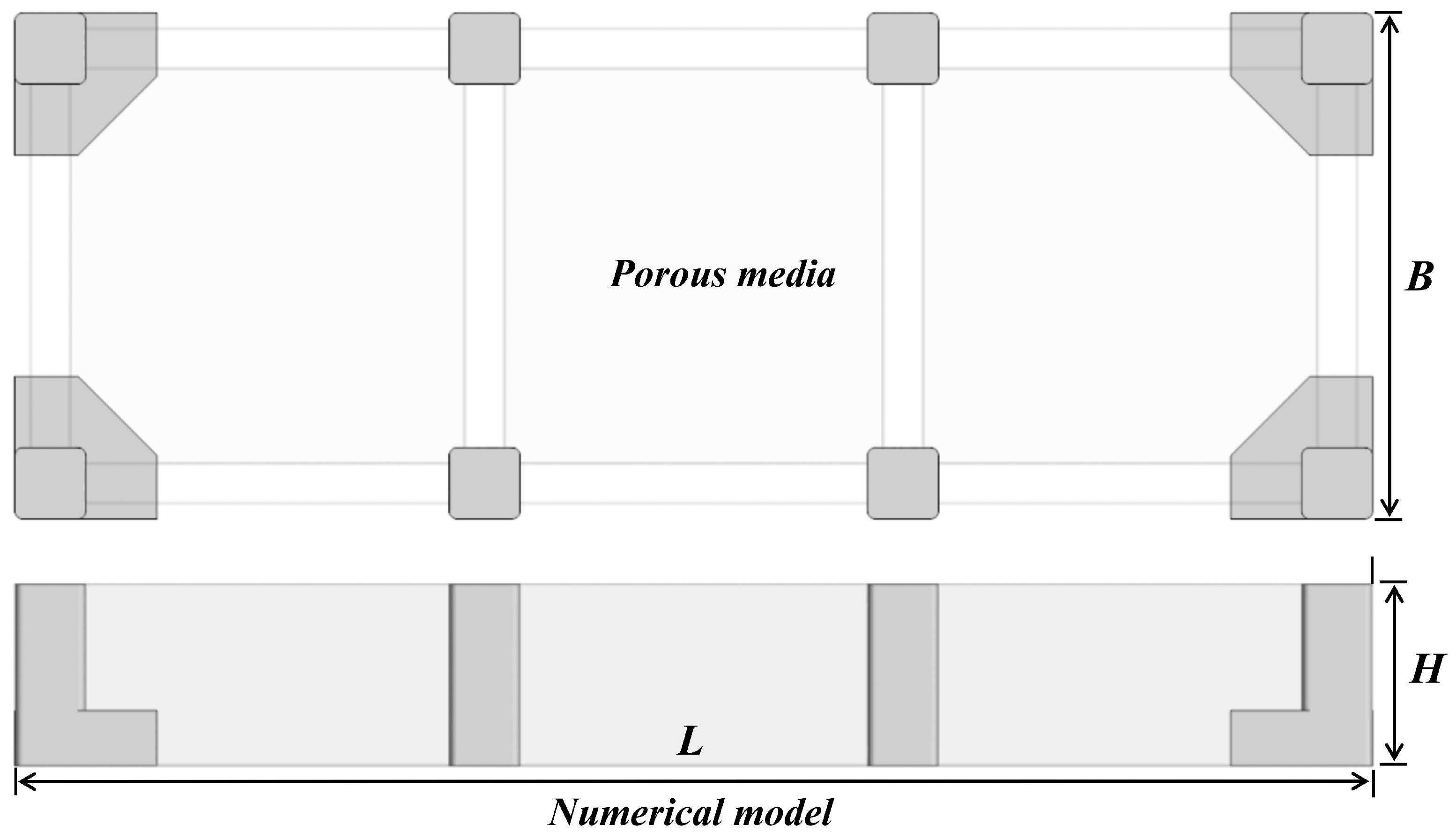
2.1. Physical Models
2.2. Mathematical Model
2.2.1. Control Equations
2.2.2. Turbulence Model
2.2.3. Porous Media Model
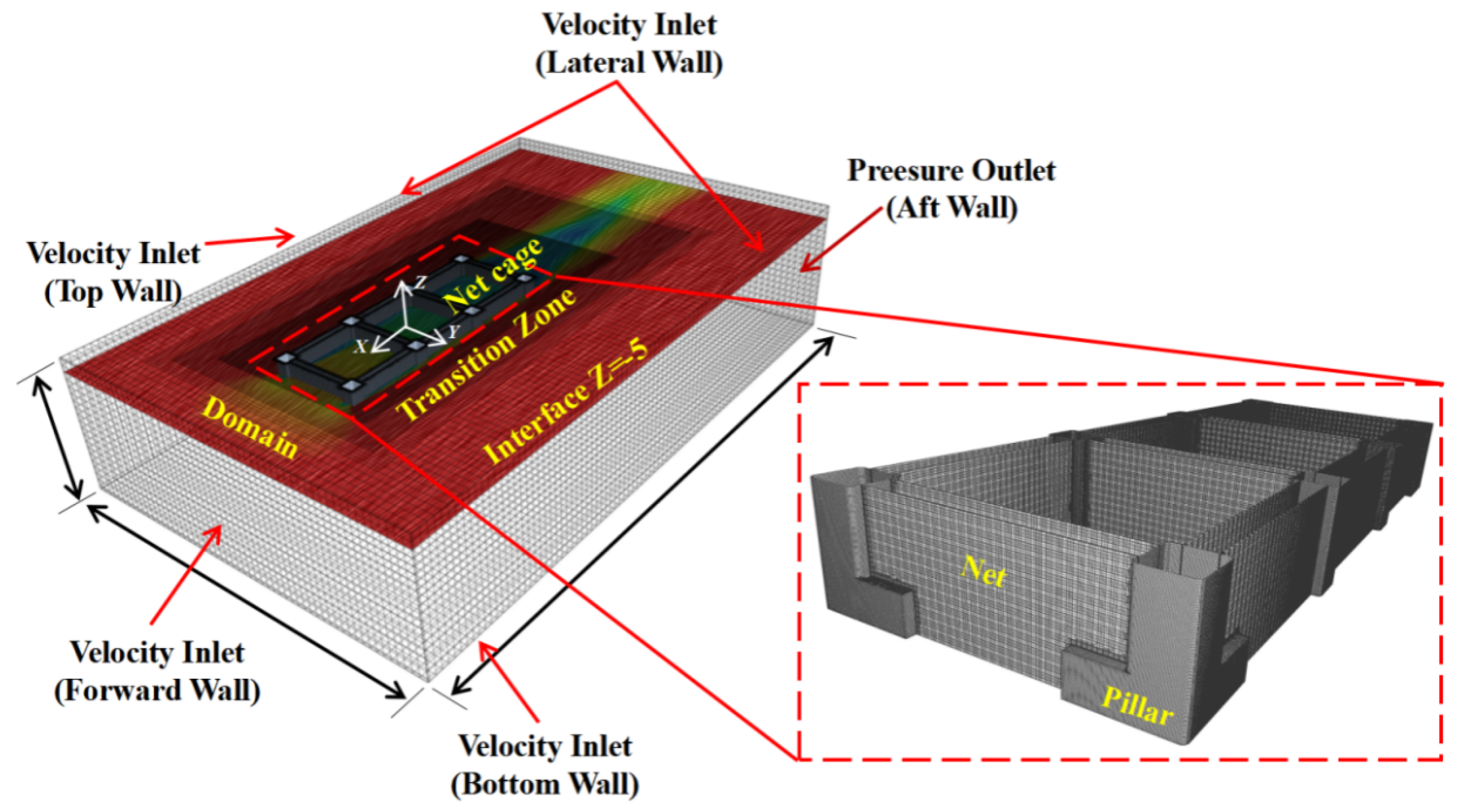
2.3. Boundary Conditions and Meshing
3. Model Validation and Convergence Analysis
3.1. Model Validation
3.2. Convergence Analysis
4. Results and Discussion
4.1. Characterization of the Flow Field in the Vicinity of the Aquaculture Platforms
4.1.1. Analysis of Flow Patterns
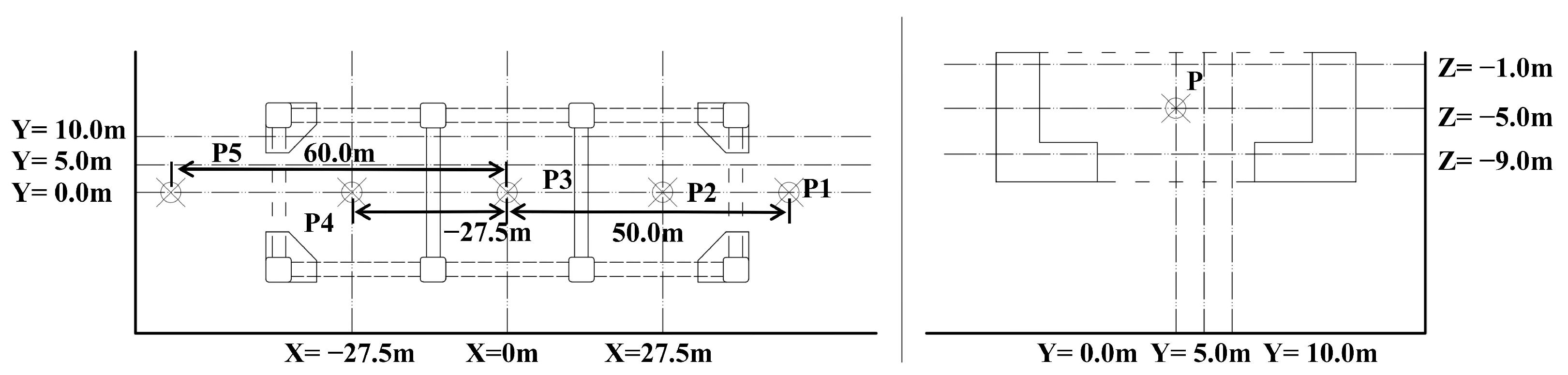
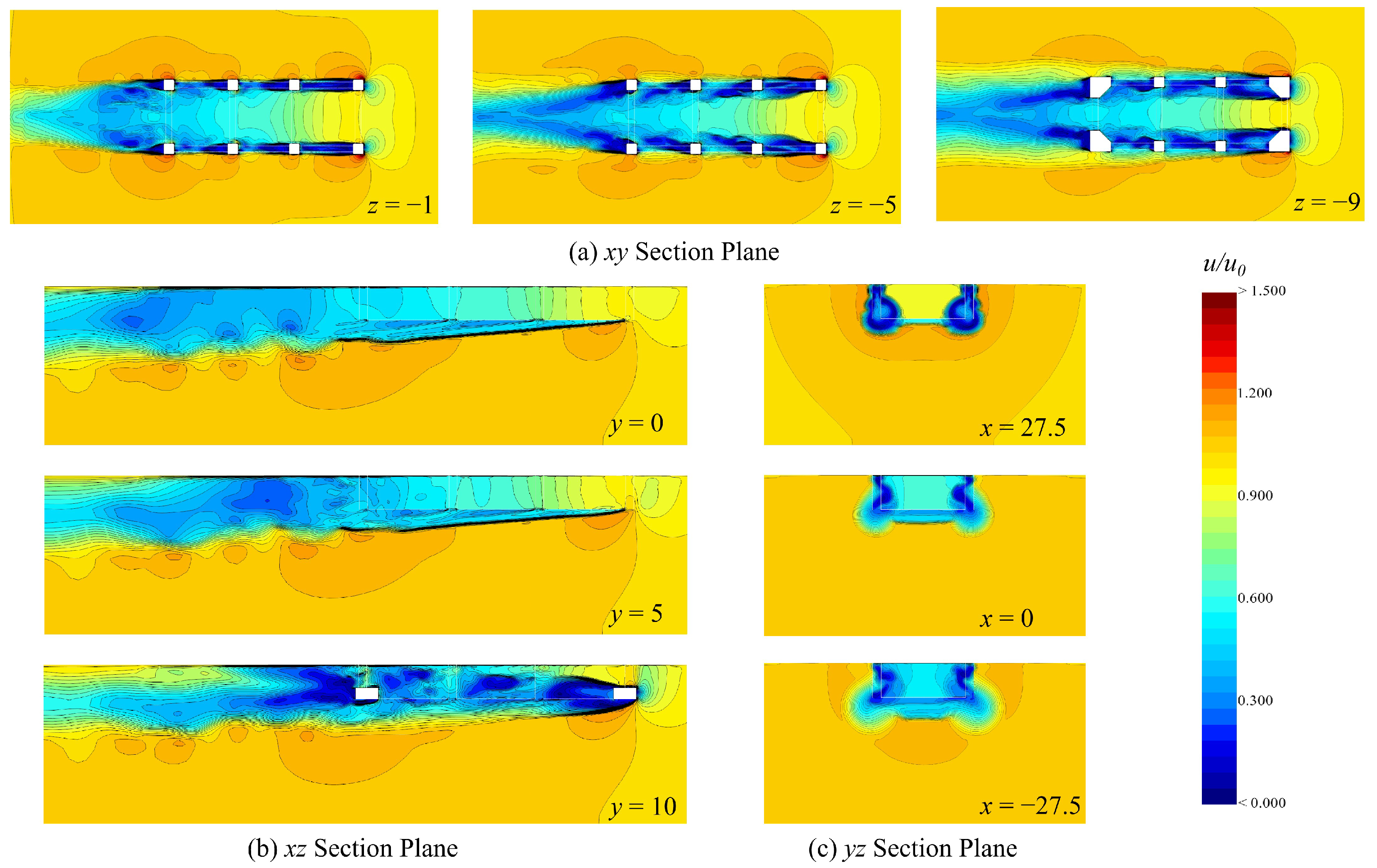
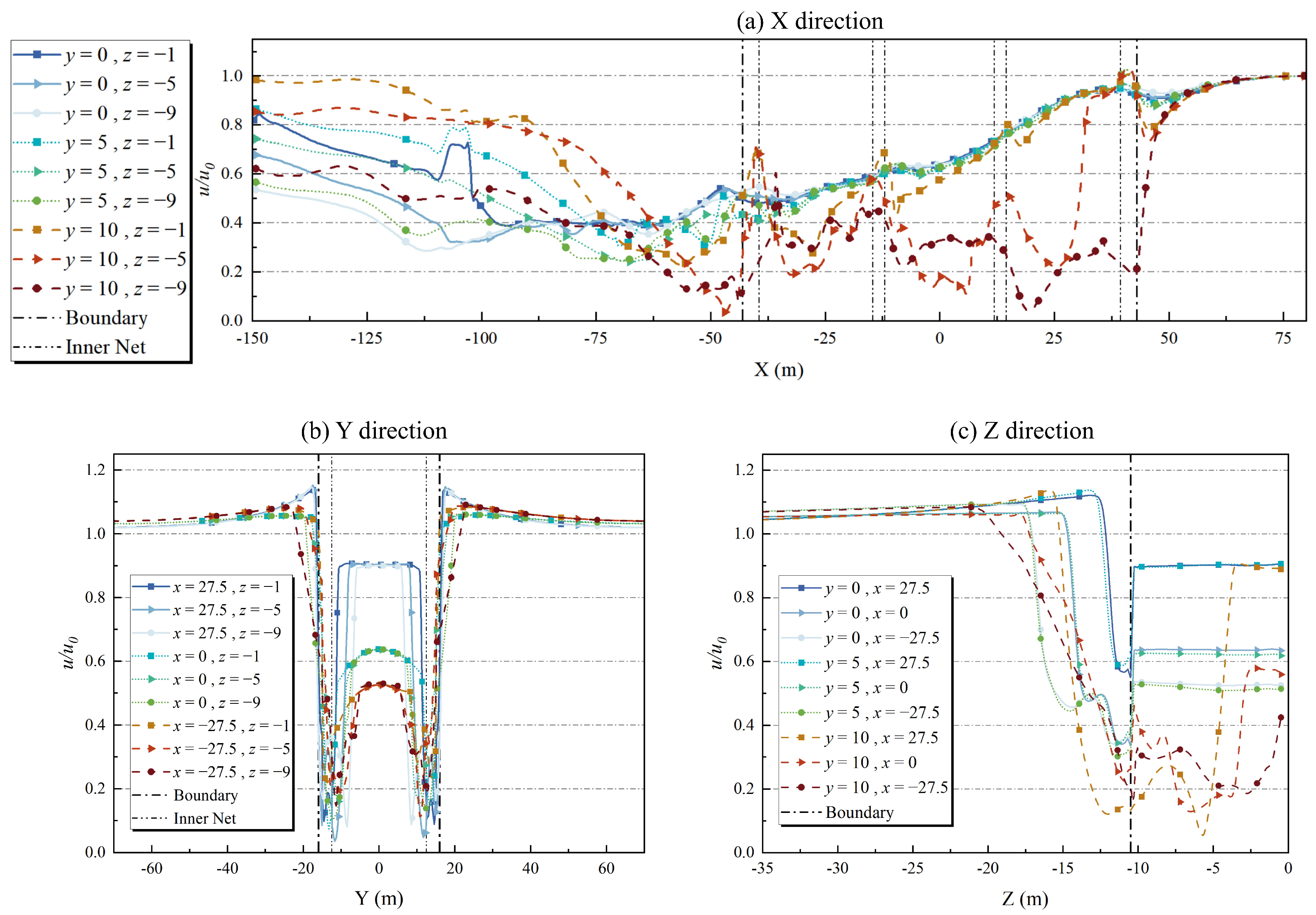
4.1.2. Velocity Distribution Analysis
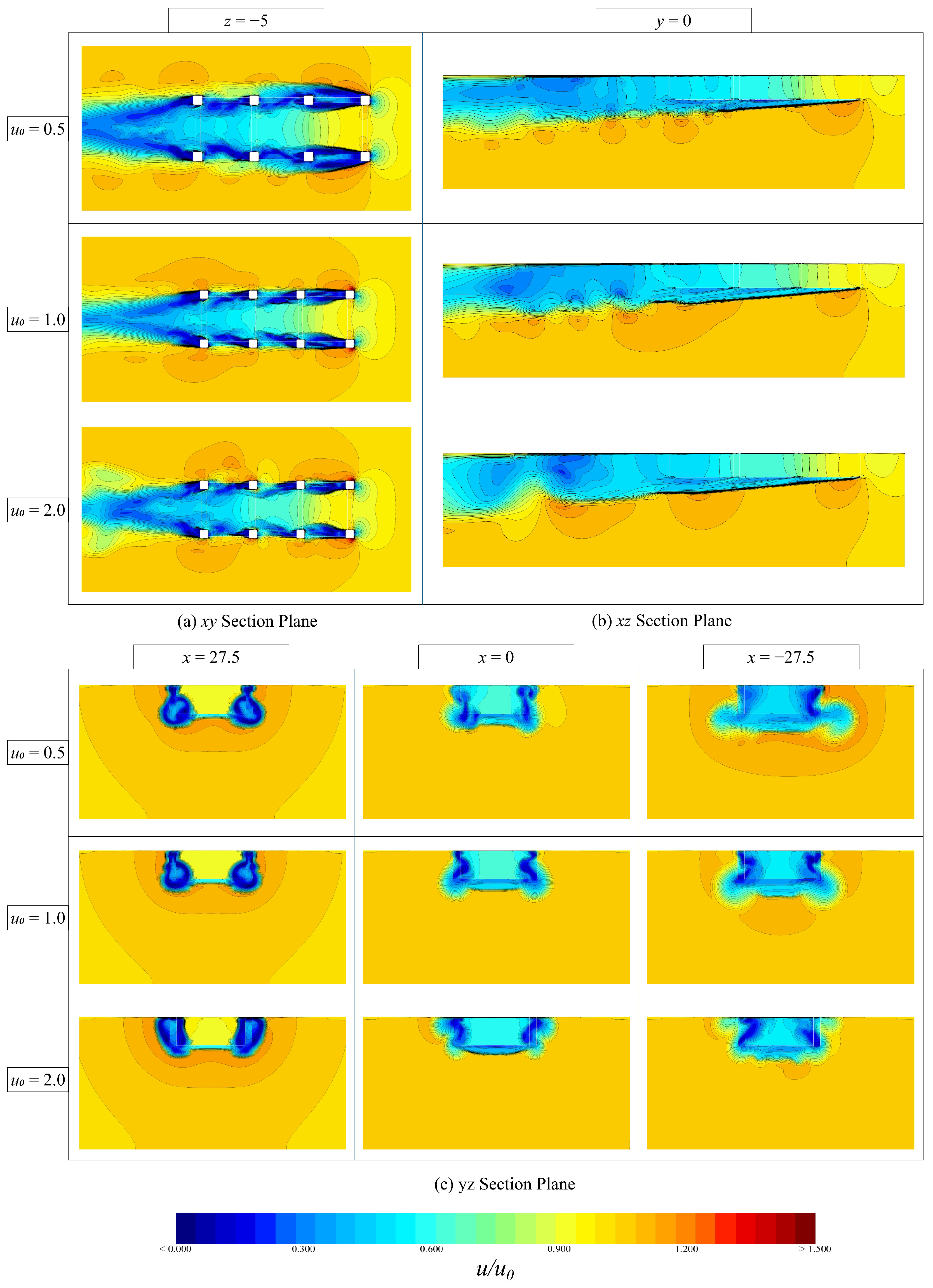
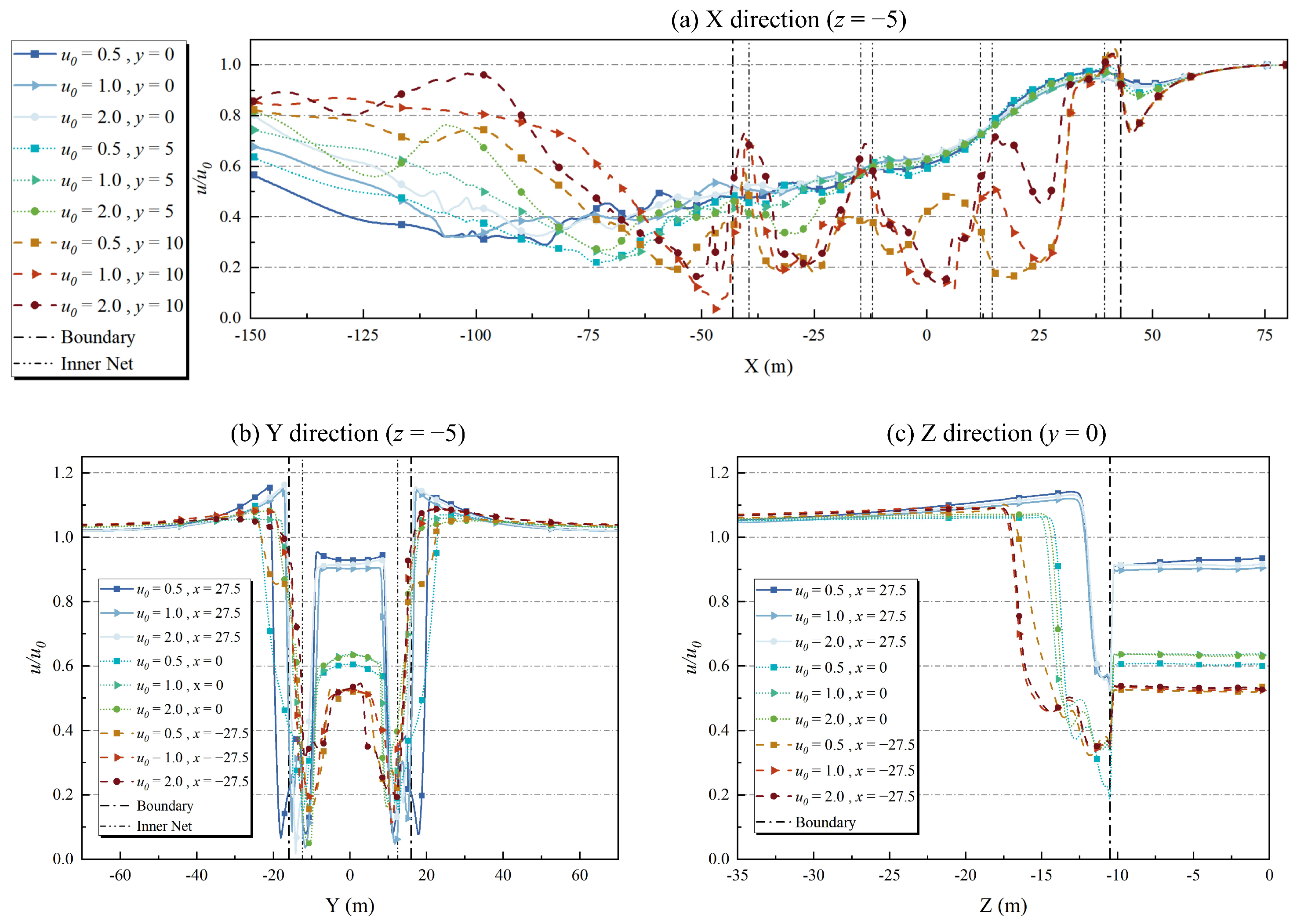
4.2. Effects of Different Incoming Flow Velocity
4.3. Effect of Different Net Solidity Ratios
5. Conclusions
- (1)
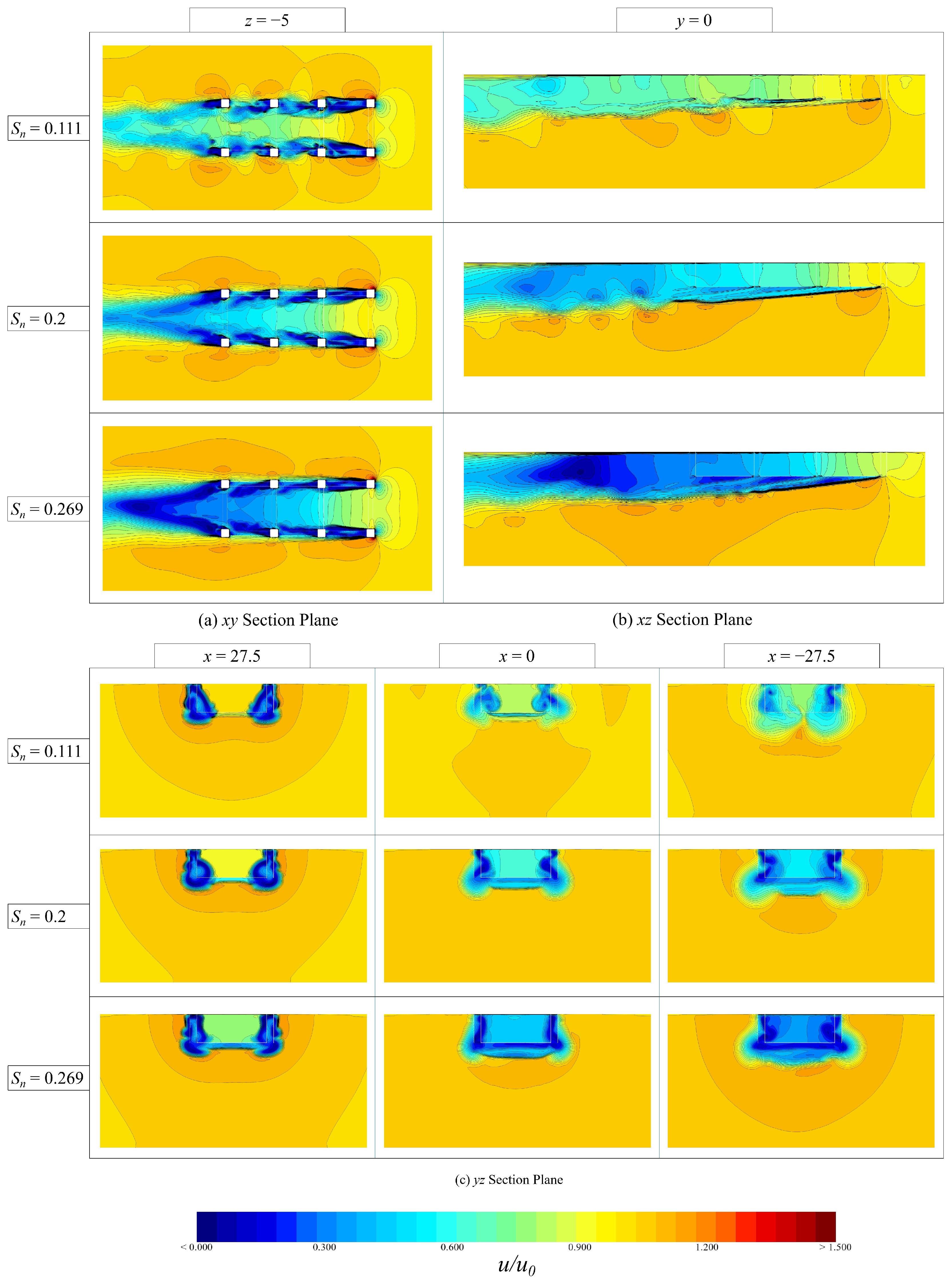
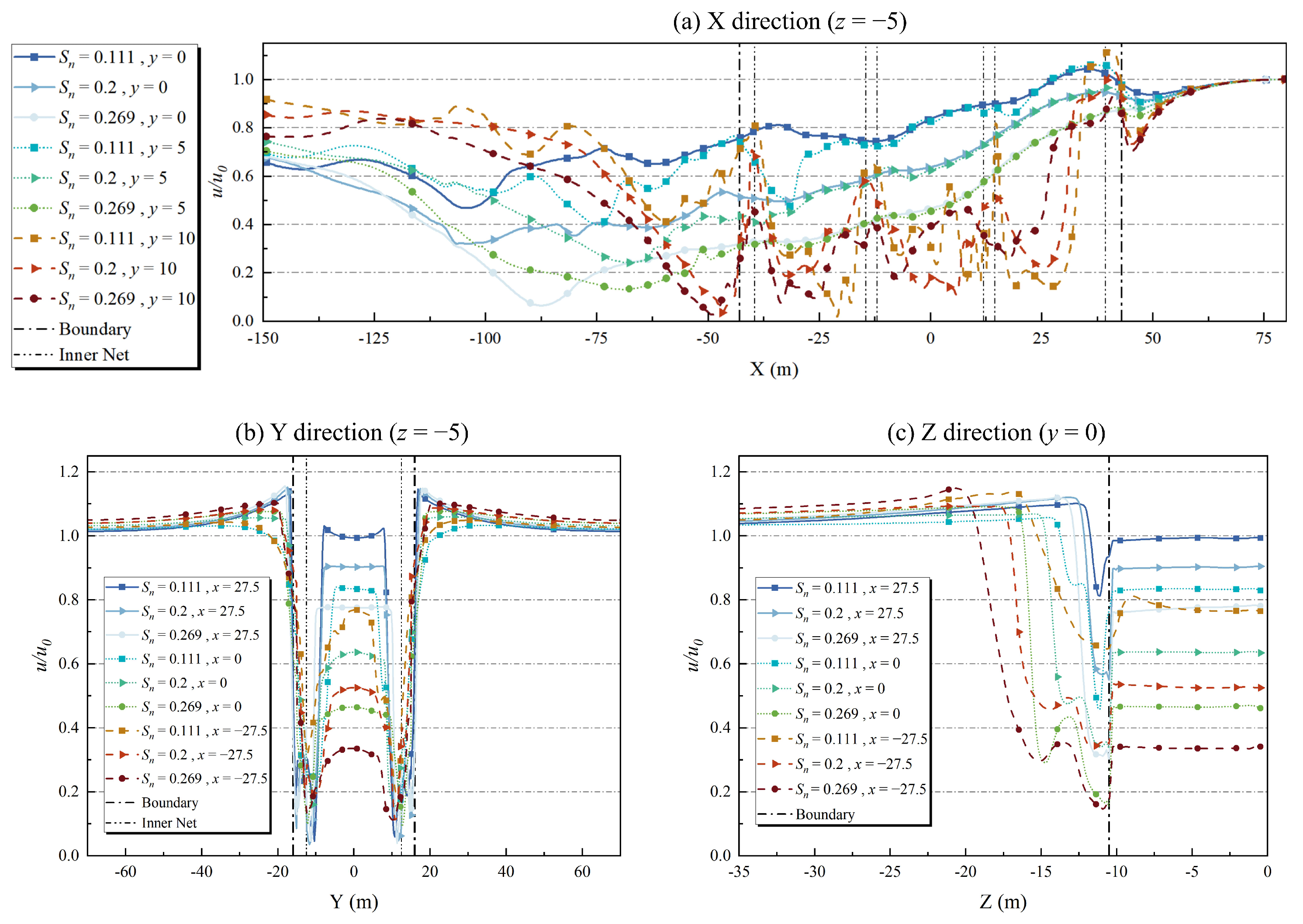
- Due to the combined effects of the pillar, net, and water flow, the flow field near the aquaculture platform is highly complex and lacks a fixed pattern. The low-velocity vortex region is concentrated near the pillar and net.
- (2)
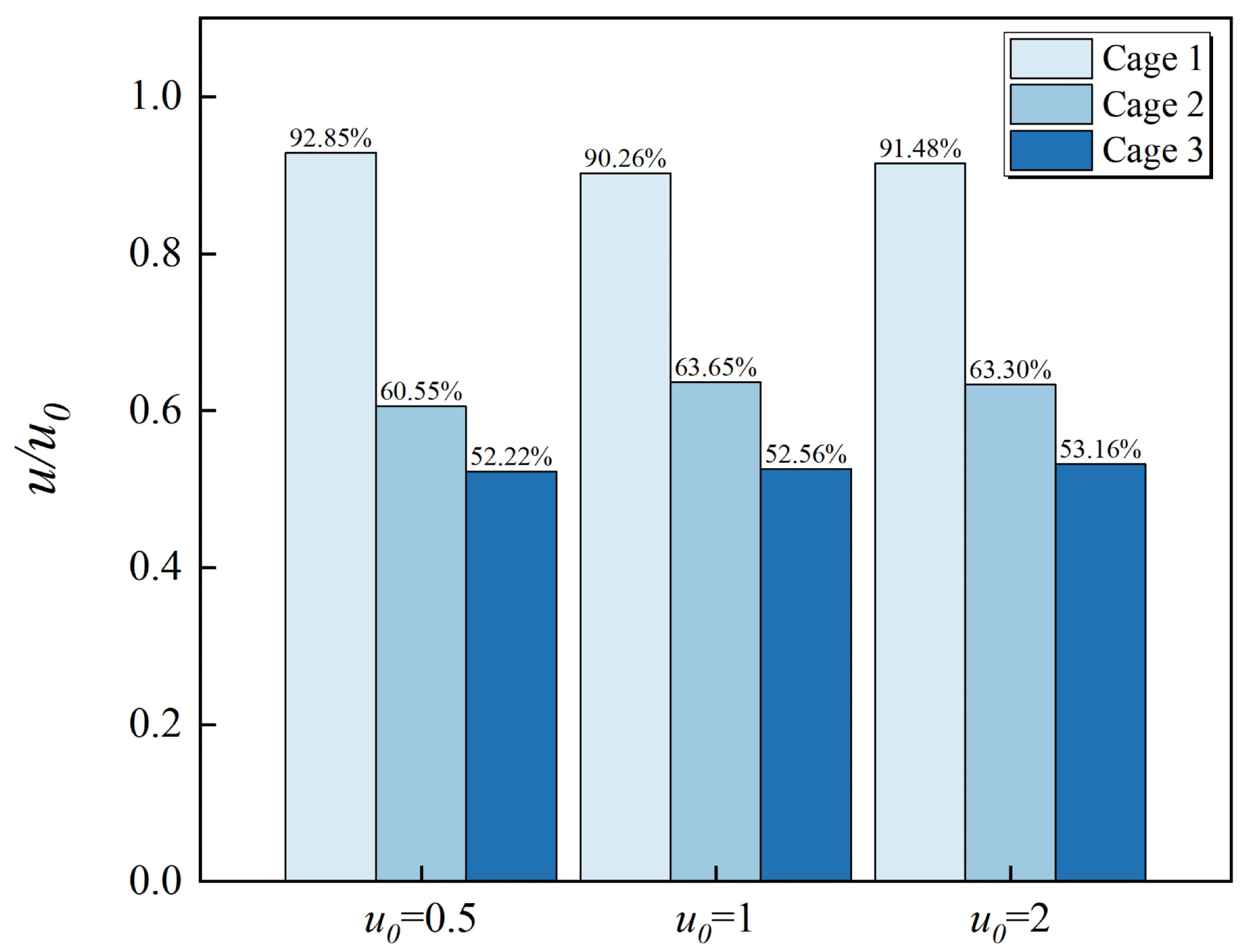
- After velocity attenuation, the at the centers of the three cages is 90.26%, 63.65%, and 52.56%, respectively. By leveraging these characteristics, precision-classified aquaculture operations can be implemented based on species-specific optimal flow velocity requirements.
- (3)
- The has minimal effects on the flow velocity inside the cages, with a maximum difference of 3.10%.
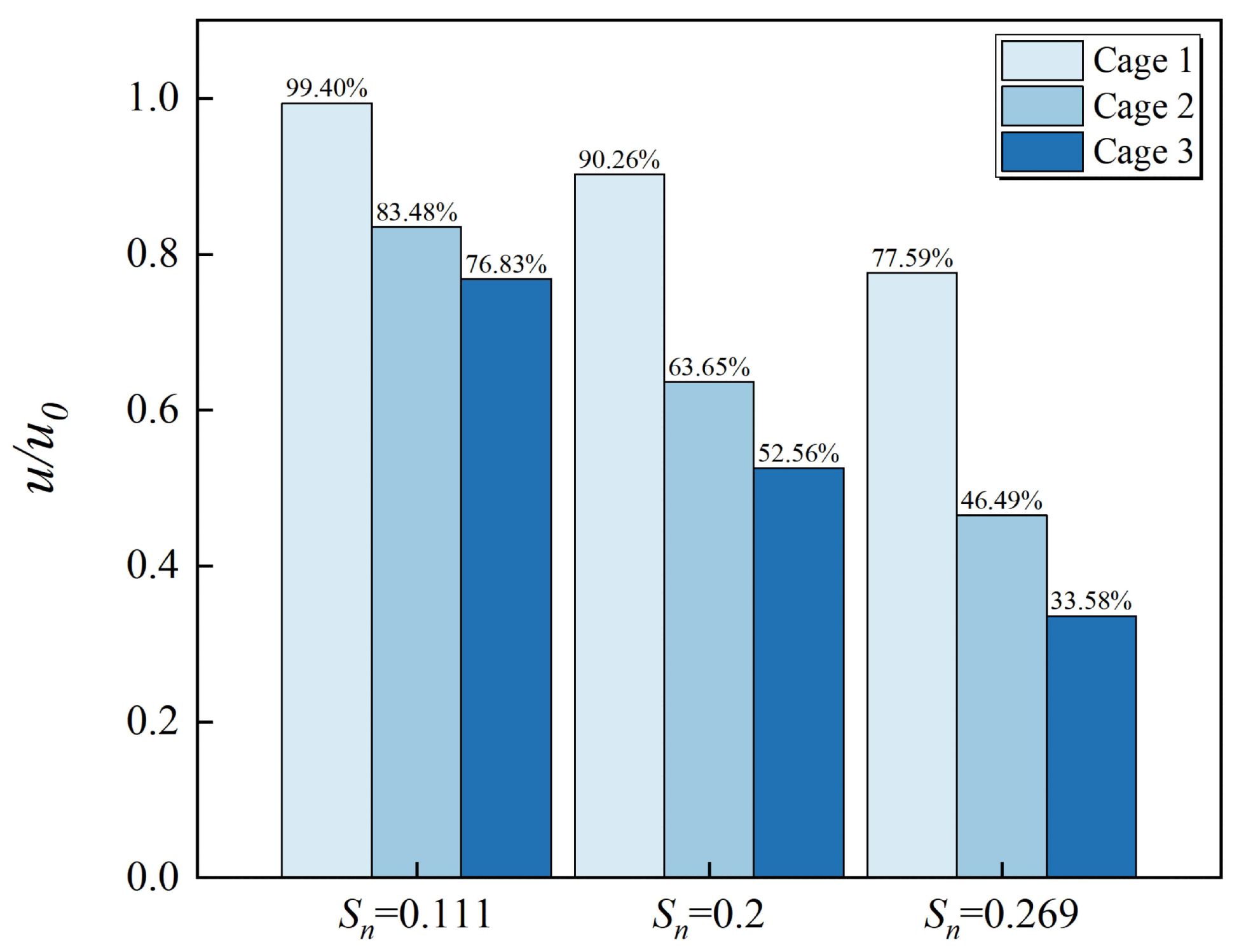
- (4)
- Variations in the markedly impact velocity attenuation, particularly in downstream areas. The in the third cage varies by up to 43.25% due to differences in the .
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| u | flow velocity |
| incoming flow velocity | |
| flow velocity reduction coefficients | |
| net solidity ratio | |
| , | components of velocity |
| dynamic viscosity | |
| p | pressure |
| Reynolds stress term | |
| , | coordinate components |
| , | Prandtl numbers |
| turbulent kinetic energy production term | |
| kinematic viscosity coefficient | |
| , | empirical constants |
| density | |
| E | modulus of the mean strain-rate tensor |
| P | pressure (distinct from p used in the pressure drop) |
| v | velocity |
| tortuosity tensor | |
| t | time |
| T | stress tensor |
| viscous resistance tensor | |
| inertial resistance tensor | |
| D | viscous coefficient tensor |
| C | inertial coefficient tensor |
| normal viscous resistance coefficient | |
| normal inertial resistance coefficient | |
| normal inertial coefficient | |
| tangential inertial coefficient | |
| net thickness | |
| normal viscous coefficient |
References
- Simone, M.N.; Vopel, K. The need for proactive environmental management of offshore aquaculture. Rev. Aquac. 2024, 16, 603–607. [Google Scholar] [CrossRef]
- Verdegem, M.; Buschmann, A.H.; Latt, U.W.; Dalsgaard, A.J.T.; Lovatelli, A. The contribution of aquaculture systems to global aquaculture production. J. World Aquacult. Soc. 2023, 54, 206–250. [Google Scholar] [CrossRef]
- Fan, Z.-Q.; Liang, Y.-H.; Zhao, Y.-P. Review of the research on the hydrodynamics of fishing cage nets. Ocean Eng. 2023, 276, 114192. [Google Scholar] [CrossRef]
- Lee, C.-W.; Kim, Y.-B.; Lee, G.-H.; Choe, M.-Y.; Lee, M.-K.; Koo, K.-Y. Dynamic simulation of a fish cage system subjected to currents and waves. Ocean Eng. 2008, 35, 1521–1532. [Google Scholar] [CrossRef]
- Zhan, J.M.; Jia, X.P.; Li, Y.S.; Sun, M.G.; Guo, G.X.; Hu, Y.Z. Analytical and experimental investigation of drag on nets of fish cages. Aquacult. Eng. 2006, 35, 91–101. [Google Scholar] [CrossRef]
- Balash, C.; Colbourne, B.; Bose, N.; Raman-Nair, W. Aquaculture net drag force and added mass. Aquacult. Eng. 2009, 41, 14–21. [Google Scholar] [CrossRef]
- Moe, H.; Fredheim, A.; Hopperstad, O.S. Structural analysis of aquaculture net cages in current. J. Fluids Struct. 2010, 26, 503–516. [Google Scholar] [CrossRef]
- Huang, L.; Li, Y.; Wang, G.; Wang, Y.; Wu, Q.; Jia, M.; Wan, R. An improved Morison hydrodynamics model for knotless nets based on CFD and metamodelling methods. Aquacult. Eng. 2022, 96, 102220. [Google Scholar] [CrossRef]
- Cifuentes, C.; Kim, M.H. Hydrodynamic response of a cage system under waves and currents using a Morison-force model. Ocean Eng. 2017, 141, 283–294. [Google Scholar] [CrossRef]
- Lader, P.F.; Fredheim, A. Dynamic properties of a flexible net sheet in waves and current—A numerical approach. Aquacult. Eng. 2006, 35, 228–238. [Google Scholar] [CrossRef]
- Kristiansen, T.; Faltinsen, O.M. Modelling of current loads on aquaculture net cages. J. Fluids Struct. 2012, 34, 218–235. [Google Scholar] [CrossRef]
- Patursson, Ø.; Swift, M.R.; Tsukrov, I.; Simonsen, K.; Baldwin, K.; Fredriksson, D.W.; Celikkol, B. Development of a porous media model with application to flow through and around a net panel. Ocean Eng. 2010, 37, 314–324. [Google Scholar] [CrossRef]
- Zhao, Y.-P.; Bi, C.-W.; Dong, G.-H.; Gui, F.-K.; Cui, Y.; Guan, C.-T.; Xu, T.-J. Numerical simulation of the flow around fishing plane nets using the porous media model. Ocean Eng. 2013, 62, 25–37. [Google Scholar] [CrossRef]
- Bi, C.-W.; Zhao, Y.-P.; Dong, G.-H.; Xu, T.-J.; Gui, F.-K. Experimental investigation of the reduction in flow velocity downstream from a fishing net. Aquacult. Eng. 2013, 57, 71–81. [Google Scholar] [CrossRef]
- Chen, H.; Christensen, E.D. Development of a numerical model for fluid-structure interaction analysis of flow through and around an aquaculture net cage. Ocean Eng. 2017, 142, 597–615. [Google Scholar] [CrossRef]
- Yue, W.; Wang, W.; Sheng, S.; Ye, Y.; Hong, T. Analysis of the wave load and dynamic response of a new semi-submersible wave-energy-powered aquaculture platform. Ocean Eng. 2022, 248, 110346. [Google Scholar] [CrossRef]
- Pang, G.; Zhang, S.; Liu, H.; Zhu, S.; Yuan, T.; Li, G.; Han, X.; Huang, X. Hydrodynamic response analysis for a new semisubmersible vessel-shaped fish farm platform based on numerical simulation. Front. Mar. Sci. 2023, 10, 1135757. [Google Scholar] [CrossRef]
- Liu, H.-F.; Liu, Y. Numerical investigation on the dynamic response of the semi-submersible aquaculture platform in regular waves. Ocean Eng. 2024, 294, 116718. [Google Scholar] [CrossRef]
- Hvas, M.; Folkedal, O.; Solstorm, D.; Vågseth, T.; Fosse, J.O.; Gansel, L.C.; Oppedal, F. Assessing swimming capacity and schooling behaviour in farmed Atlantic salmon Salmo salar with experimental push-cages. Aquaculture 2017, 473, 423–429. [Google Scholar] [CrossRef]
- Zhao, Y.-P.; Liu, H.-F.; Bi, C.-W.; Cui, Y.; Guan, C.-T. Numerical study on the flow field inside and around a semi-submersible aquaculture platform. Appl. Ocean Res. 2021, 115, 102824. [Google Scholar] [CrossRef]
- Liu, H.-F.; Bi, C.-W.; Xu, Z.; Zhao, Y.-P. Hydrodynamic assessment of a semi-submersible aquaculture platform in uniform fluid environment. Ocean Eng. 2021, 237, 109656. [Google Scholar] [CrossRef]
- Yang, C.; Yuan, H.; Bai, X.; Hao, Z.; Sun, Y.; Wu, D.; Johanning, L. Numerical investigations on fluid characteristics around the bottom-fixed aquacultural farm. Ocean Eng. 2022, 266, 112689. [Google Scholar] [CrossRef]
- Ji, J.; Zhou, L.; Liu, B.; Guedes Soares, C. Experimental and numerical analysis of a bottom-supported aquaculture platform in uniform flow. Ocean Eng. 2024, 311, 118859. [Google Scholar] [CrossRef]
- Ji, J.; Zhou, L.; Liu, B.; Guedes Soares, C. Experimental and numerical study on the flow field of a bottom-supported net cage with double-layer fishing nets. Ocean Eng. 2025, 319, 120228. [Google Scholar] [CrossRef]
- Huang, H.; Ayoub, J. Applicability of the Forchheimer equation for non-Darcy flow in porous media. SPE J. 2008, 13, 112–122. [Google Scholar] [CrossRef]
- Patursson, Ø. Flow Through and Around Fish Farming Nets. Ph.D. Thesis, University of New Hampshire, Durham, NH, USA, 2008. [Google Scholar]
- Liu, Q.; Chen, H.; Wang, B. A true double-body method based on porous media model for simulation and froude scaling verification of an aquaculture vessel resistance. Ocean Eng. 2024, 310, 118501. [Google Scholar] [CrossRef]
- Solstorm, F.; Solstorm, D.; Oppedal, F.; Olsen, R.E.; Stien, L.H.; Fernö, A. Not too slow, not too fast: Water currents affect group structure, aggression and welfare in post-smolt Atlantic salmon Salmo salar. Aquacult. Environ. Interact. 2016, 8, 339–347. [Google Scholar] [CrossRef]
- Ji, M.; Li, H. Effects of exercise training on growth and physiology of large-mouth bass (Micropterus salmoides) reared in a recirculating aquaculture system. Front. Mar. Sci. 2024, 11, 1423146. [Google Scholar] [CrossRef]
- Cheng, H.; Li, L.; Aarsæther, K.G.; Ong, M.C. Typical hydrodynamic models for aquaculture nets: A comparative study under pure current conditions. Aquacult. Eng. 2020, 90, 102070. [Google Scholar] [CrossRef]
- Yao, Y.; Chen, Y.; Zhou, H.; Yang, H. Numerical modeling of current loads on a net cage considering fluid–structure interaction. J. Fluids Struct. 2016, 62, 350–366. [Google Scholar] [CrossRef]
- Winthereig-Rasmussen, H.; Simonsen, K.; Patursson, Ø. Flow through fish farming sea cages: Comparing computational fluid dynamics simulations with scaled and full-scale experimental data. Ocean Eng. 2016, 124, 21–31. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Length | L | 86.00 m |
| Breadth | B | 32.00 m |
| Operating draft | H | 10.50 m |
| Aquaculture volume | - | 36,000 m3 |
| Encryption Zone | Dimensions | Grid Size |
|---|---|---|
| Domain | 1.28–2.56 m | |
| Transition Zone 1 | 0.64 m | |
| Transition Zone 2 | 0.32 m | |
| Pillar | – | 0.08 m |
| Net | – | 0.05–0.20 m |
| No. | Time Steps | Total Grids N/Million | No. | Total Grids N/Million | Time Steps |
|---|---|---|---|---|---|
| Mesh 1 | 4.50 | TimeStep 1 | 0.50 | ||
| Mesh 2 | 0.20 | 9.70 | TimeStep 2 | 9.70 | 0.20 |
| Mesh 3 | 22.50 | TimeStep 3 | 0.10 |
| (kg/) | (kg/) | |
|---|---|---|
| 0.111 | 564.312 | 33.457 |
| 0.2 | 1271.391 | 423.564 |
| 0.269 | 2244.421 | 961.895 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, B.; Li, J.; Ruan, J.; Hao, J.; Huang, J. Characterization of the Internal and External Flow Field of a Semi-Submersible Aquaculture Platform with Multiple Net Cage Configuration. J. Mar. Sci. Eng. 2025, 13, 1373. https://doi.org/10.3390/jmse13071373
Hu B, Li J, Ruan J, Hao J, Huang J. Characterization of the Internal and External Flow Field of a Semi-Submersible Aquaculture Platform with Multiple Net Cage Configuration. Journal of Marine Science and Engineering. 2025; 13(7):1373. https://doi.org/10.3390/jmse13071373
Chicago/Turabian StyleHu, Bo, Jiawen Li, Juncheng Ruan, Jiawei Hao, and Ji Huang. 2025. "Characterization of the Internal and External Flow Field of a Semi-Submersible Aquaculture Platform with Multiple Net Cage Configuration" Journal of Marine Science and Engineering 13, no. 7: 1373. https://doi.org/10.3390/jmse13071373
APA StyleHu, B., Li, J., Ruan, J., Hao, J., & Huang, J. (2025). Characterization of the Internal and External Flow Field of a Semi-Submersible Aquaculture Platform with Multiple Net Cage Configuration. Journal of Marine Science and Engineering, 13(7), 1373. https://doi.org/10.3390/jmse13071373