
Trajectory Tracking of Unmanned Surface Vessels Based on Robust Neural Networks and Adaptive Control

 , ,
, ,
Abstract
1. Introduction
- (1)
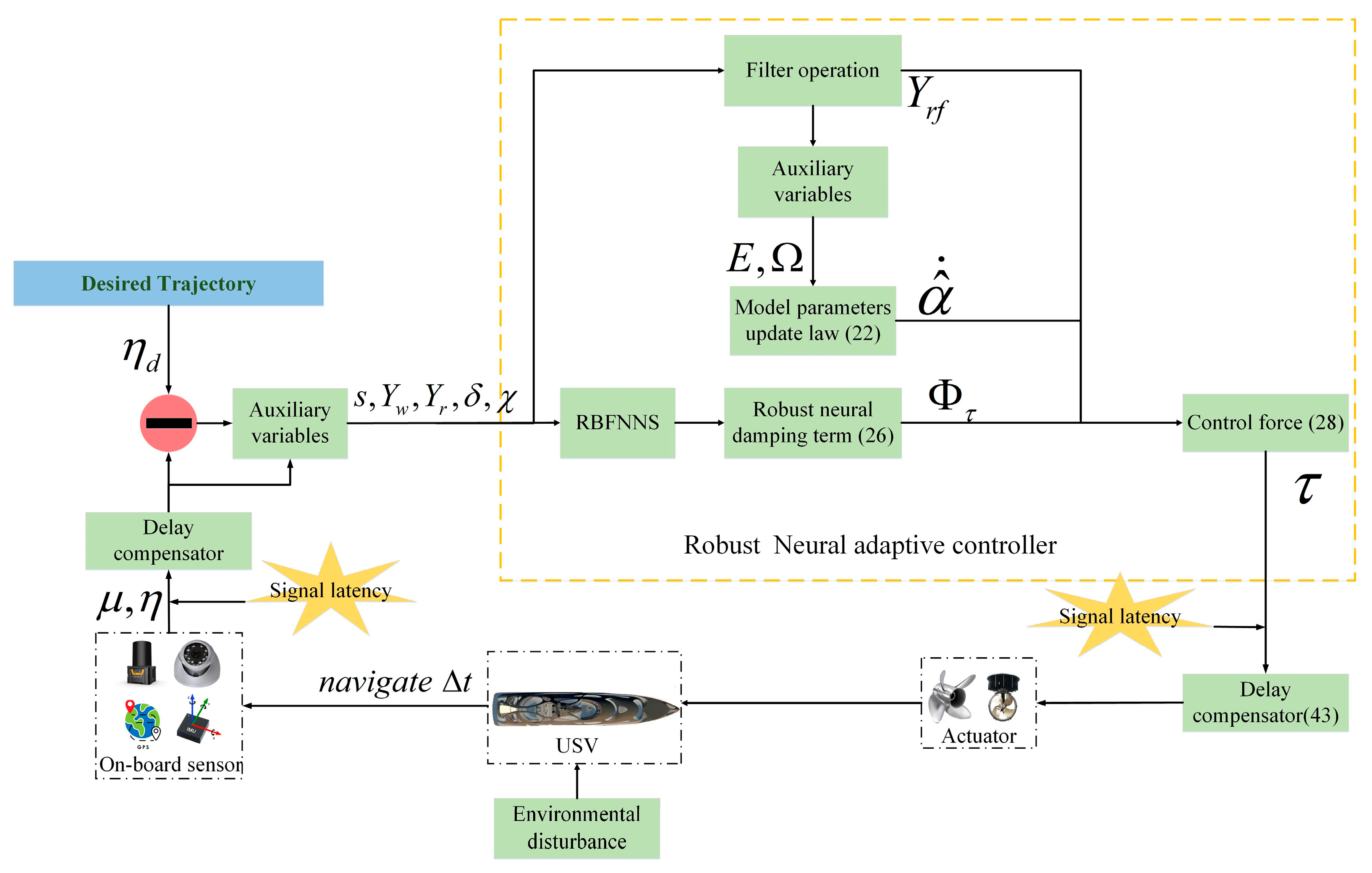
- A robust neural adaptive trajectory tracking controller is designed to achieve trajectory tracking for USVs under conditions when the dynamic parameters are unknown, have unmodeled dynamics in the dynamic model, have unknown time-varying environmental disturbances, and have actuator saturation constraints.
- (2)
- The controller separately addresses the unknown dynamic parameters and the unmodeled dynamics in the uncertain model. In the controller, the RBF-NNs are employed to approximate the unmodeled dynamics, while robust neural damping techniques are used to compensate for the unknown time-varying environmental disturbances and the unmodeled dynamics.
- (3)
- The controller incorporates a parameter adaptive update law for online identification of all USV dynamic parameters. This ensures convergence of both parameter estimation errors and tracking errors when dynamic parameters are unknown or perturbed.
2. Problem Formulation
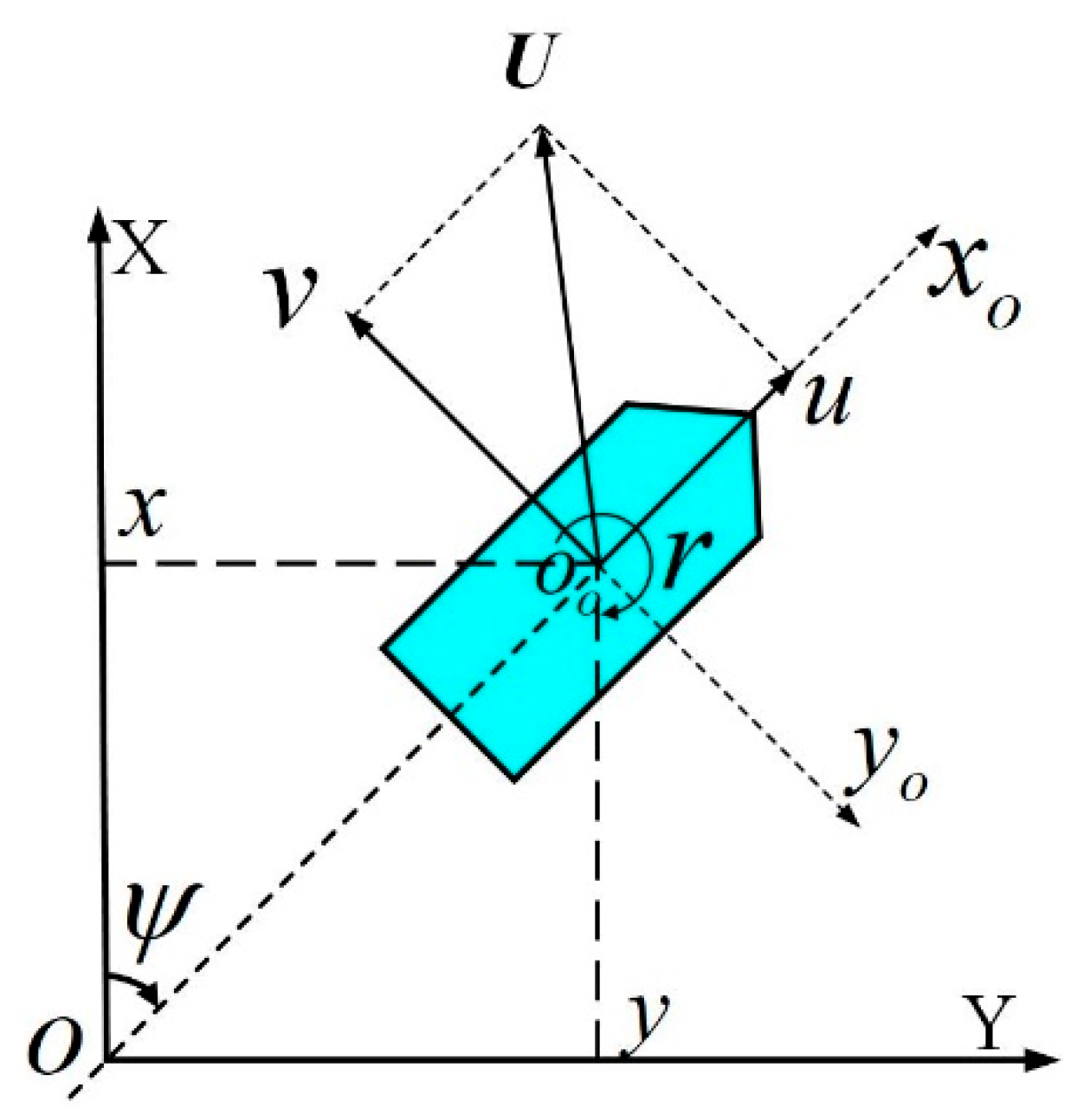
2.1. USV Model
2.2. Actuator Saturation
2.3. Definition of USV Trajectory Tracking
3. Controller
3.1. Controller Design
3.1.1. Step 1: Design of Auxiliary Variables Incorporating Error Signals
3.1.2. Step 2: Design of Dynamic Parameters Adaptive Update Law
3.1.3. Step 3: Robust Neural Damping Technique for Compensating Unmodeled Dynamics and Environmental Disturbances
3.1.4. Step 4: Design of the Control Law
3.2. Stability Analysis of the Proposed Controller
- Step 1. Proof That , Are SGUUB.
- Step 2. Proof That Are SGUUB.
3.3. Design of Signal Delay Compensator
4. Simulation Experiments
- (1)
- Root Mean Square (RMS): . Evaluates the controller’s performance during the entire trajectory tracking process. A smaller RMS indicates better overall tracking performance.
- (2)
- Mean Absolute Steady-State Error (SSE): . Assess the controller’s steady-state performance, where is the total tracking time and denotes the initial time of steady-state. Smaller SSE values indicate better steady-state performance.
- (3)
- Transient Maximum Absolute Error (TME): . Evaluates the controller’s transient performance. A smaller TME indicates better transient performance.
- (4)
- Define the variance of control force to better quantify controller output chattering. A smaller value indicates less output chattering and better controller practicality.
4.1. Design of Experimental Parameters
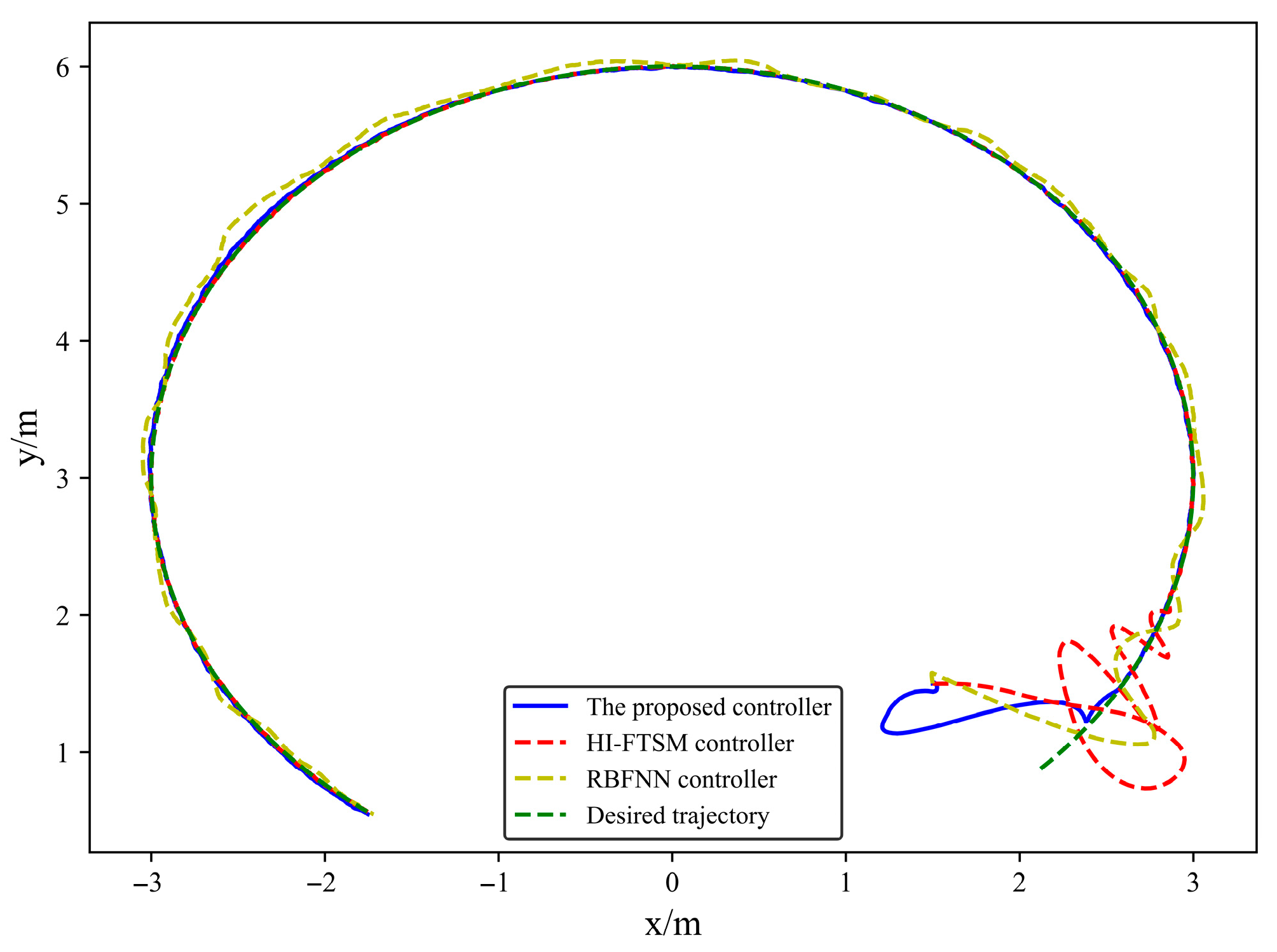
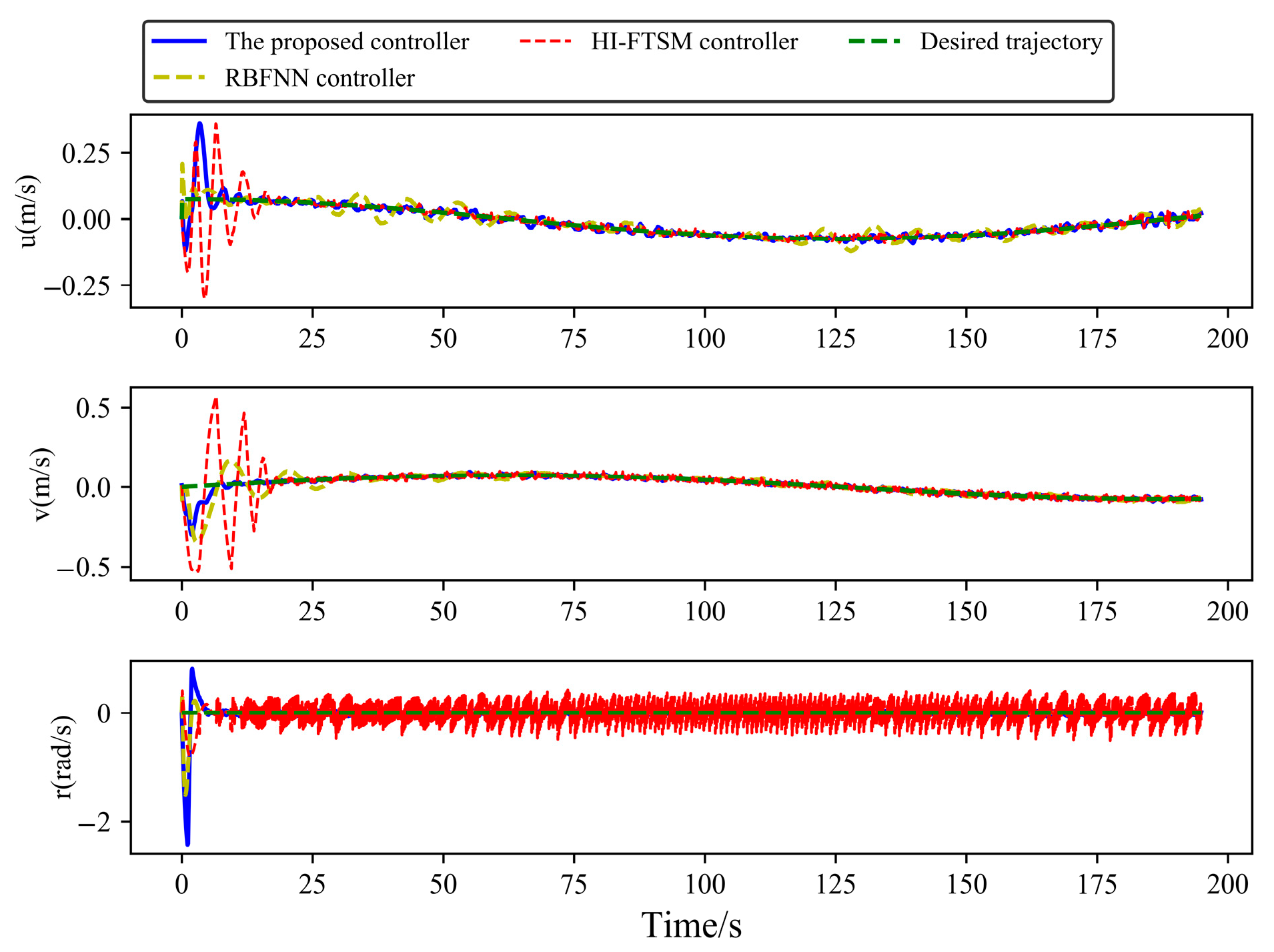
4.2. Case 1: Circular Trajectory Tracking
4.3. Case 2: Straight Trajectory Tracking
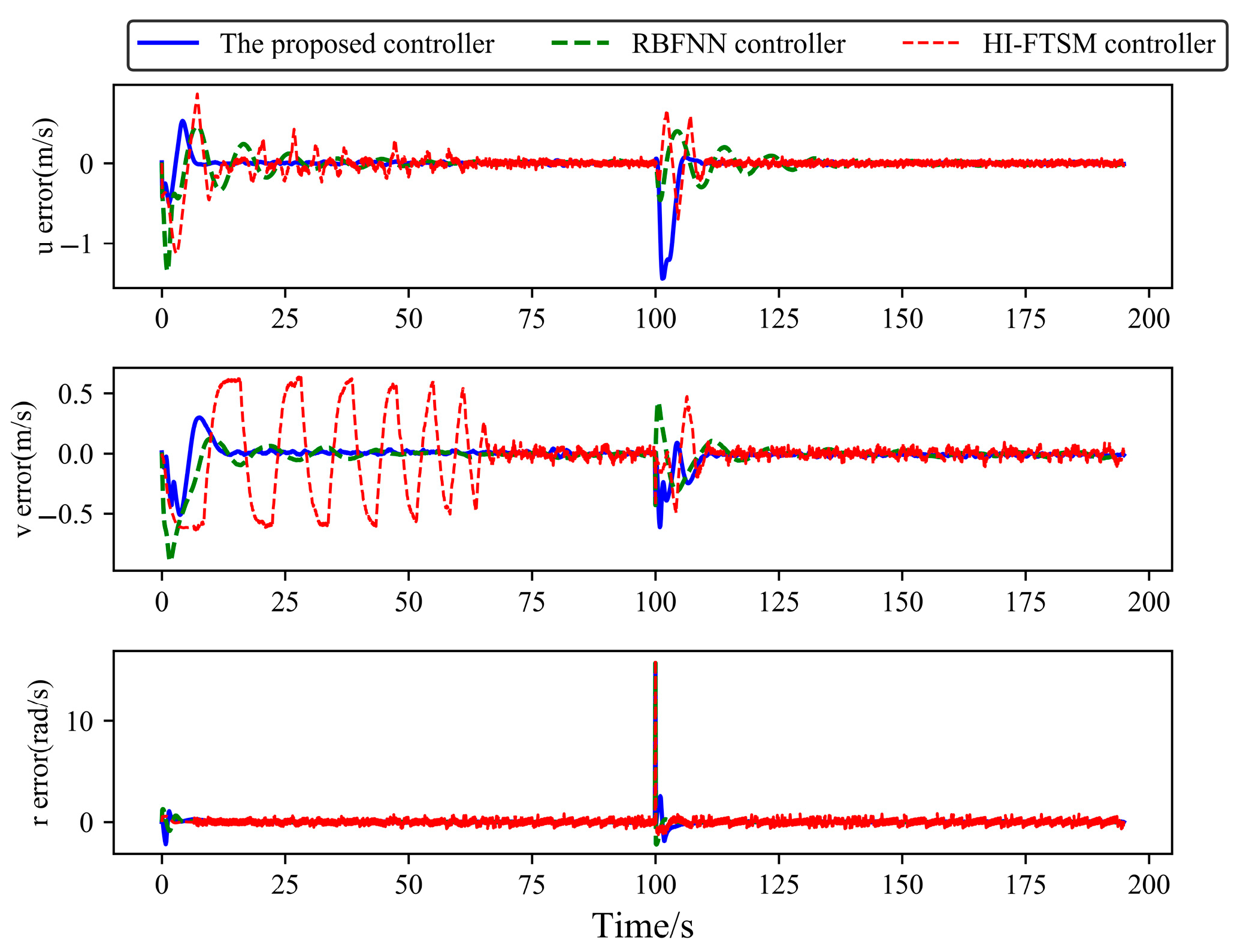
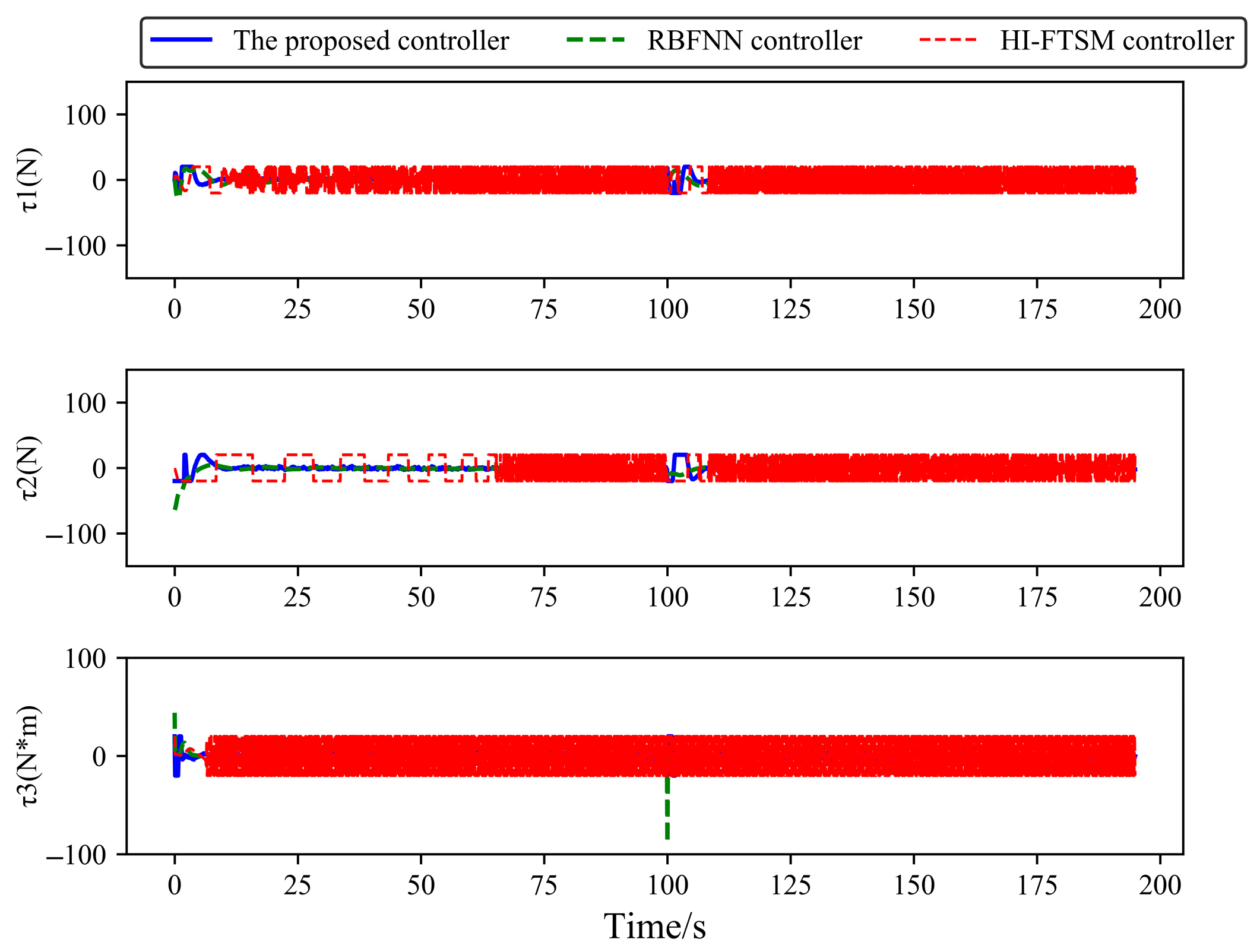
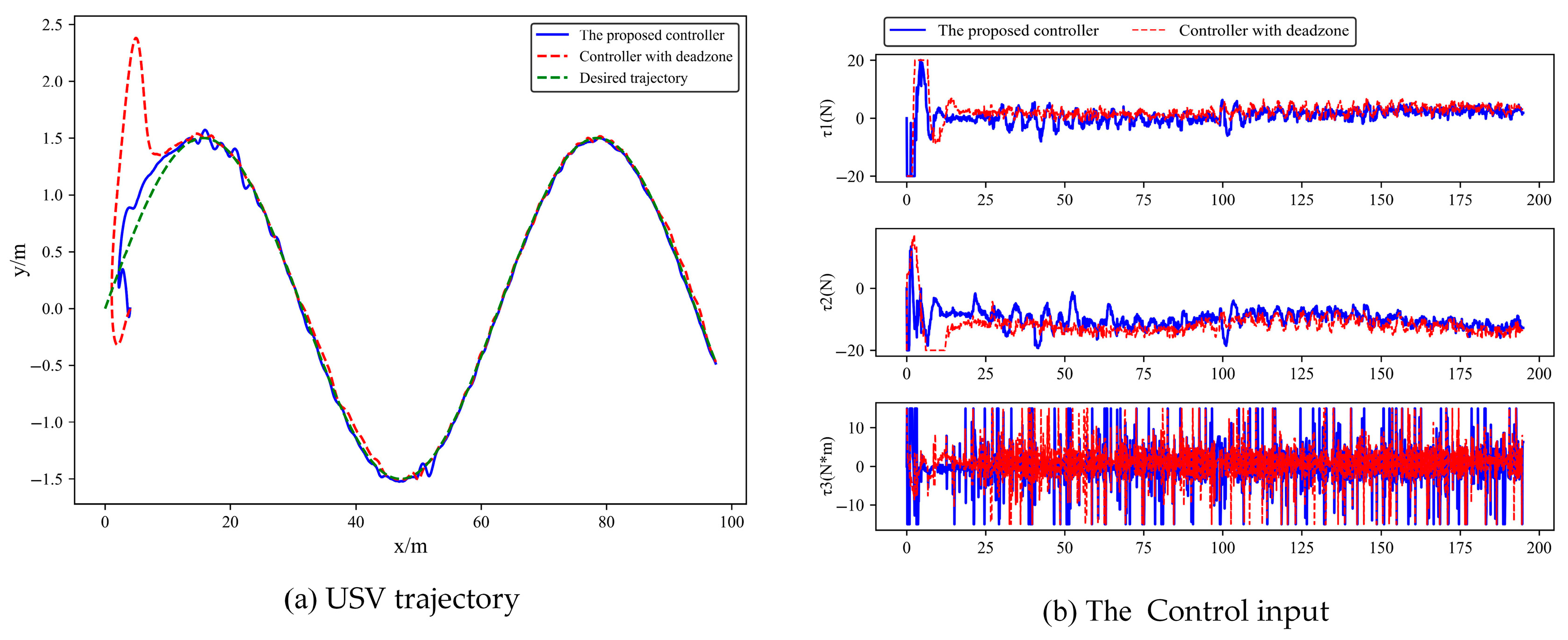
4.4. Case 3: Sinusoidal Trajectory Tracking
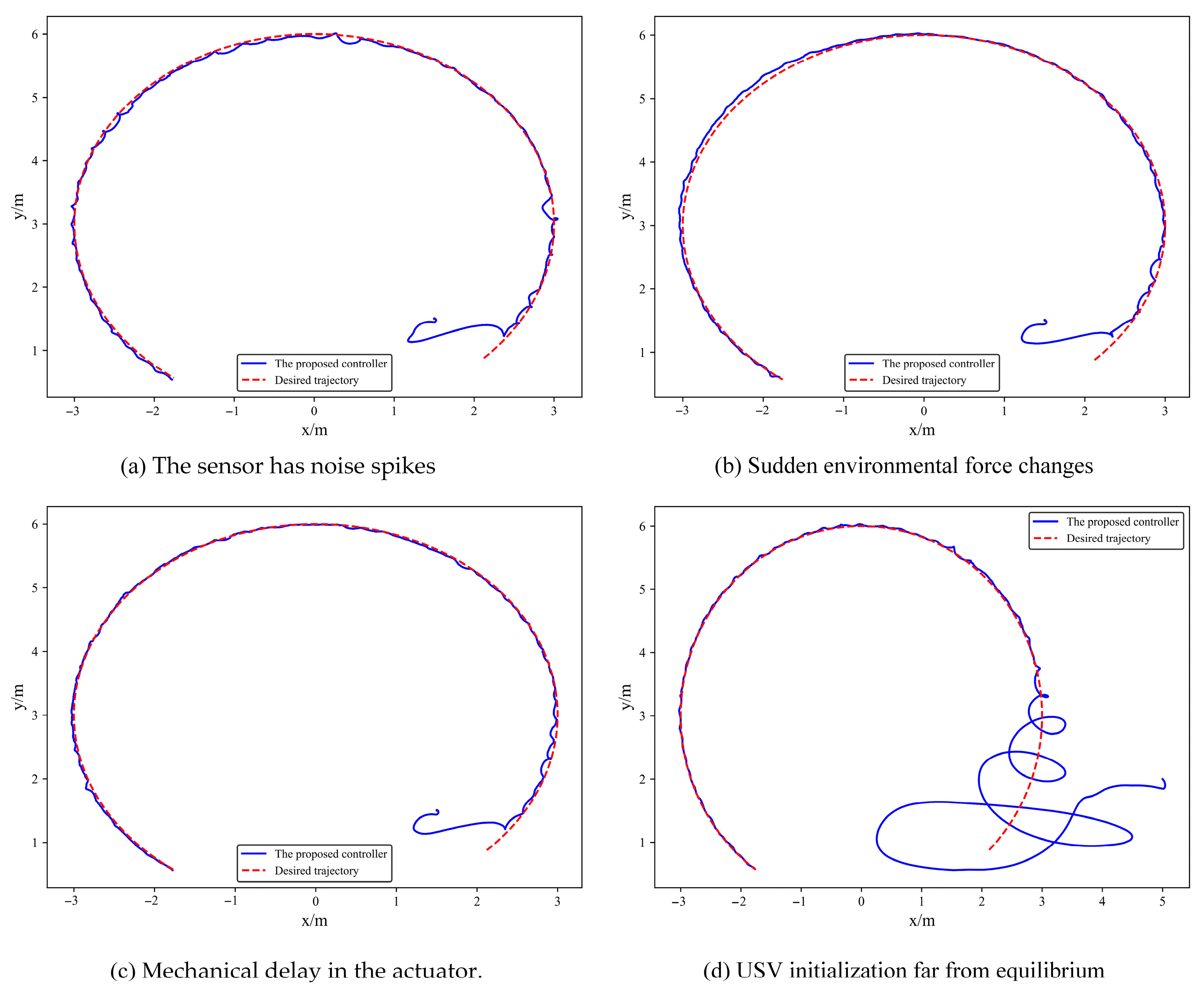
4.5. Case 4: Edge Case Exploration and Design Parameter Sensitivity and Robustness Analysis
- (1)
- For the target parameter , select 9 values [] within its reasonable range.
- (2)
- Fix = while keeping other parameters at Table 3 values. Using desired trajectory (49), simulate 20 USV tracking voyages (1000 steps each) with: sensor noise (methodology as before); environmental disturbances (methodology as before); unmodeled dynamics via randomized scaling factor k = 0.2~0.4 applied to , and to simulate the unmodeled part in the USV dynamic model under this tracking voyage. Record performance metrics , and generate boxplots based on to evaluate robustness at .
- (3)
- Repeat step 2 for … to obtain sensitivity trends.
- (4)
- Iterate for other design parameters.
- (a)
- Sensor noise spikes:In the sensor collects signals , Gaussian white noise (σ2 = 0.001) is superimposed with intermittent spikes occurring every 100 time steps, where spikes followed N (0,0.01).
- (b)
- Sudden environmental force changes:Every 100 time steps, the USV experienced a disturbance force equal to 3 times of the nominal environmental force.
- (c)
- Actuator mechanical delay:The actuator experiences a mechanical delay every 50 time steps, causing the control force output by the actuator at that moment to be the same as that of the previous moment.
- (d)
- Off-equilibrium initialization:For trajectory (49), USV initial conditions are: .
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qu, Y.; Cai, L. Simultaneous planning and executing trajectory tracking control for underactuated unmanned surface vehicles from theory to practice. Ocean. Eng. 2023, 270, 113665. [Google Scholar] [CrossRef]
- Sui, B.; Zhang, J.; Liu, Z. Prescribed-time dynamic positioning control for USV with lumped disturbances, thruster saturation and prescribed performance constraints. Remote Sens. 2024, 16, 4142. [Google Scholar] [CrossRef]
- Zheng, S.; Su, Y.; Zhuang, J.; Tang, Y.; Yi, G. Fixed-time path-following-based underactuated unmanned surface vehicle dynamic positioning control. J. Mar. Sci. Eng. 2024, 12, 551. [Google Scholar] [CrossRef]
- Yuan, W.; Rui, X. Deep reinforcement learning-based controller for dynamic positioning of an unmanned surface vehicle. Comput. Electr. Eng. 2023, 110, 108858. [Google Scholar] [CrossRef]
- Liu, Z.; Song, S.; Yuan, S.; Ma, Y.; Yao, Z. ALOS-based USV path-following control with obstacle avoidance strategy. J. Mar. Sci. Eng. 2022, 10, 1203. [Google Scholar] [CrossRef]
- Lin, M.; Zhang, Z.; Pang, Y.; Lin, H.; Ji, Q. Underactuated USV path following mechanism based on the cascade method. Sci. Rep. 2022, 12, 1461. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Lin, C.; Li, J.; Zhang, W. Composite anti-disturbance path following control for the underactuated surface vessel under actuator faults. Nonlinear Dyn. 2024, 113, 3579–3592. [Google Scholar] [CrossRef]
- Wu, C.; Yu, W.; Liao, W.; Ouyang, H. Deep reinforcement learning with intrinsic curiosity module based trajectory tracking control for USV. Ocean. Eng. 2024, 308, 118342. [Google Scholar] [CrossRef]
- Xu, D.; Liu, Z.; Song, J.; Zhou, X. Finite time trajectory tracking with full-state feedback of underactuated unmanned surface vessel based on nonsingular fast terminal sliding mode. J. Mar. Sci. Eng. 2022, 10, 1845. [Google Scholar] [CrossRef]
- Xiong, Y.; Zhu, H.; Pan, L.; Wang, J. Research on intelligent trajectory control method of water quality testing unmanned surface vessel. J. Mar. Sci. Eng. 2022, 10, 1252. [Google Scholar] [CrossRef]
- Wang, Y.; Shen, C.; Chen, H. Event-triggered trajectory tracking control for USV with prescribed performance and time delay based on differential flatness. Meas. Control 2024, 57, 1023–1034. [Google Scholar] [CrossRef]
- Yuan, S.; Liu, Z.; Sun, Y.; Wang, Z.; Zheng, L. An event-triggered trajectory planning and tracking scheme for automatic berthing of unmanned surface vessel. Ocean. Eng. 2023, 273, 113964. [Google Scholar] [CrossRef]
- Souissi, S.; Boukattaya, M. Time-varying nonsingular terminal sliding mode control of autonomous surface vehicle with predefined convergence time. Ocean. Eng. 2022, 263, 112264. [Google Scholar] [CrossRef]
- Zheng, Y.; Tao, J.; Hartikainen, J.; Duan, F.; Sun, H.; Sun, M.; Sun, Q.; Zeng, X.; Chen, Z.; Xie, G. DDPG based LADRC trajectory tracking control for underactuated unmanned ship under environmental disturbances. Ocean. Eng. 2023, 271, 113667. [Google Scholar] [CrossRef]
- Liu, W.; Ye, H.; Yang, X. Model-Free Adaptive Sliding Mode Control Method for Unmanned Surface Vehicle Course Control. J. Mar. Sci. Eng. 2023, 11, 17. [Google Scholar] [CrossRef]
- Souissi, S.; Boukattaya, M.; Damak, T.; Nejim, S. Adaptive control for fully-actuated autonomous surface vehicle with uncertain model and unknown ocean currents. Ocean. Eng. 2020, 217, 108147. [Google Scholar] [CrossRef]
- Xiong, Y.; Wang, X.; Zhou, S. Online Interactive Identification Method Based on ESO Disturbance Estimation for Motion Model of Double Propeller Propulsion Unmanned Surface Vehicle. Control. Theory Technol. 2024, 22, 292–314. [Google Scholar] [CrossRef]
- Wang, H.; Luo, Q.; Li, N.; Zheng, W. Data-Driven Model Free Formation Control for Multi-USV System in Complex Marine Environments. Int. J. Control. Autom. Syst. 2022, 20, 3666–3677. [Google Scholar] [CrossRef]
- He, Z.; Fan, Y.; Wang, G.; Mu, D. Cooperative trajectory tracking control of MUSVs with periodic relative threshold event-triggered mechanism and safe distance. Ocean. Eng. 2022, 269, 113541. [Google Scholar] [CrossRef]
- Mu, D.; Li, L.; Wang, G.; Fan, Y.; Zhao, Y.; Sun, X. State constrained control strategy for unmanned surface vehicle trajectory tracking based on improved barrier Lyapunov function. Ocean. Eng. 2023, 286, 114276. [Google Scholar] [CrossRef]
- Zhang, G.; Dong, X.; Liu, J.; Zhang, X. Nussbaum-type function based robust neural event-triggered control of unmanned surface vehicle subject to cyber and physical attacks. Ocean. Eng. 2023, 270, 113664. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, C.; Wang, J.; Li, C. Neuro-adaptive trajectory tracking control of underactuated autonomous surface vehicles with high-gain observer. Appl. Ocean. Res. 2020, 97, 102051. [Google Scholar] [CrossRef]
- Meng, Y.; Ye, H.; Xiang, Z.; Yang, X.; Zhang, H. An adaptive internal model control approach for unmanned surface vehicle based on bidirectional long short-term memory neural network: Implementation and field testing. Mechatronics 2024, 99, 103145. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar] [CrossRef]
- Yan, Z.; Feng, W.; Wang, H. Adaptive surge control of variable-mass unmanned surface vehicle based on sliding mode observation. Ocean. Eng. 2022, 269, 113576. [Google Scholar] [CrossRef]
- Li, S.; Xu, C.; Liu, J.; Han, B. Data-driven docking control of autonomous double-ended ferries based on iterative learning model predictive control. Ocean. Eng. 2023, 273, 113994. [Google Scholar] [CrossRef]
- Huang, J.; Xu, D.; Li, Y.; Ma, Y. Near-optimal tracking control of partially unknown discrete-time nonlinear systems based on radial basis function neural network. Mathematics 2024, 12, 1146. [Google Scholar] [CrossRef]
- Li, G.; Li, W.; Hildre, H.P.; Zhang, H. Online learning control of surface vessel for fine trajectory tracking. J. Mar. Sci. Technol. 2015, 21, 251–260. [Google Scholar] [CrossRef]
- Yao, Q. Adaptive finite-time sliding mode control design for finite-time fault-tolerant trajectory tracking control of marine vehicles with input saturation. J. Frankl. Inst. 2020, 357, 13593–13619. [Google Scholar] [CrossRef]
- Owais, M.; Moussa, G.S. Global sensitivity analysis for studying hot-mix asphalt dynamic modulus parameters. Constr. Build. Mater. 2023, 413, 15. [Google Scholar] [CrossRef]
- Idriss, L.K.; Owais, M. Global sensitivity analysis for seismic performance of shear wall with high-strength steel bars and recycled aggregate concrete. Constr. Build. Mater. 2023, 411, 17. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| 23.8 | 0.1079 | −0.805 | |||
| 1.76 | 0.0 | −0.845 | |||
| 0.046 | 0.1052 | −3.45 | |||
| −0.7225 | −0.5 | 5.0437 | |||
| −2.0 | −1.0 | 0.13 | |||
| −0.8612 | −1.3274 | 0.08 | |||
| −10.0 | −36.2823 | −0.75 |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| 10 | 10 | 10 | |||
| 0 | 10 | 10 | |||
| 0 | 10 | 10 | |||
| 10 | 10 | 10 | |||
| 15 | 10 | 10 | |||
| 10 | 10 | 10 | |||
| 10 | 10 | 10 |
| Controller | Parameters |
|---|---|
| The proposed controller | , , , , , , , , , . |
| RBFNN controller | , , . |
| HI-FTSM controller | . |
| Method | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| The proposed controller | 8.75 | 5.37 | 10.19 | 2.52 | 1.92 | 1.21 | 67.05 | 62.27 | 130.89 |
| RBFNN controller | 9.22 | 9.69 | 7.81 | 3.25 | 4.77 | 2.32 | 67.44 | 66.37 | 133.89 |
| HI-FTSM controller | 7.88 | 8.48 | 12.40 | 0.17 | 0.18 | 3.34 | 63.31 | 62.13 | 139.98 |
| Method | Time Per Step (ms) | |||
|---|---|---|---|---|
| The proposed controller | 6.01 | 5.95 | 6.39 | 2.489 |
| RBFNN controller | 3.78 | 4.66 | 1.13 | 0.874 |
| HI-FTSM controller | 10.39 | 33.77 | 205.95 | 2.400 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Qiu, C.; Dong, Z.; Cheng, S.; Zheng, L.; Chen, S. Trajectory Tracking of Unmanned Surface Vessels Based on Robust Neural Networks and Adaptive Control. J. Mar. Sci. Eng. 2025, 13, 1341. https://doi.org/10.3390/jmse13071341
Wang Z, Qiu C, Dong Z, Cheng S, Zheng L, Chen S. Trajectory Tracking of Unmanned Surface Vessels Based on Robust Neural Networks and Adaptive Control. Journal of Marine Science and Engineering. 2025; 13(7):1341. https://doi.org/10.3390/jmse13071341
Chicago/Turabian StyleWang, Ziming, Chunliang Qiu, Zaopeng Dong, Shaobo Cheng, Long Zheng, and Shunhuai Chen. 2025. "Trajectory Tracking of Unmanned Surface Vessels Based on Robust Neural Networks and Adaptive Control" Journal of Marine Science and Engineering 13, no. 7: 1341. https://doi.org/10.3390/jmse13071341
APA StyleWang, Z., Qiu, C., Dong, Z., Cheng, S., Zheng, L., & Chen, S. (2025). Trajectory Tracking of Unmanned Surface Vessels Based on Robust Neural Networks and Adaptive Control. Journal of Marine Science and Engineering, 13(7), 1341. https://doi.org/10.3390/jmse13071341