1. Introduction
The EU recognized the risk of greenhouse gas problems due to rapid industrialization and announced a climate policy. This climate policy aims to reduce greenhouse gas emissions by 90% by 2040 compared to 1990 levels [
1]. Accordingly, many experts started research on greenhouse gas reduction in their respective fields. Among them, tidal current energy is one of the best energy sources considering high efficiency, production stability, and predictability. The difference in tidal range, caused by the gravitational pull of the moon and the sun, can be converted into energy. The kinetic energy of the fluid particles in the tide as the seawater flows in turns the turbines to produce electricity. The turbines transmit the generated electrical energy to the land through power cables. Usually, seawater is about 832 times denser than air and a relatively small turbine can produce a lot of electricity. Also, tidal current energy can be produced both during the day and at night.
Recently, floating tidal energy systems have attracted attention because they have overcome the limitations of onshore tidal energy platforms. The floating tidal platform can be installed with all equipment inside and is easy to maintain [
2,
3,
4,
5,
6,
7,
8,
9]. Therefore, many previous studies have been conducted. Jo, C. et al. analyzed the mooring system of a floating tidal power plant (TCP) using a commercial analysis program (OrcaFlex) and designed an optimal design to obtain a safe dynamic response [
10]. Arini, N. R. et al. performed a dynamic response analysis on vertical and horizontal modular tidal energy platforms, and the effective tension of the mooring line under different environmental loads was analyzed [
11].
In addition to tidal energy, research on floating platforms to obtain various energy sources has been conducted. Song, J. et al. analyzed the dynamic response of floating solar panels under various environmental loads and when the mooring line was broken [
12]. Yang, R. Y. et al. analyzed the dynamic response of floating photovoltaics (FPV) under normal and extreme environmental conditions through experiments and numerical analysis. The commercial analysis program ANSYS AQWA 2020 was used for numerical analysis, and ANSYS FLUENT was used for wave pressure analysis [
13]. Li, L. et al. designed a novel offshore floating renewable energy system combining an offshore floating wind turbine (OFWT), a wave energy converter (WEC), and a tidal turbine [
14]. Muliawan, M. J. et al. performed numerical analysis in the time domain using SIMO/TDHMILL3D and calculated the wind power generation of Spar under operating conditions [
15].
Furthermore, many studies related to the structure monitoring approach of floating system have also been carried out thus far. Chung, W. C. et al. created an algorithm to analyze the status of mooring lines and risers. The results of numerical analysis using Orcaflex were compared with the results derived through the algorithm, and it can be confirmed that the results are in good agreement [
16,
17,
18].
Also, effective tension applied to mooring chains were analyzed using multiple approaches [
19]. Guo, X. et al. investigated the effects of thrust and torque on the dynamic response of a floating tidal turbine [
20]. Du, J. et al. compared the dynamic responses of six mooring systems, including those combining different buoys with mooring lines [
21]. Tang, Y. et al. presented a methodology to overcome the limits of Orcaflex and obtain more accurate results by using additional software [
22]. Thomsen, J. B. et al. compared the results obtained from Open FAST and Orcaflex, and the reason for this was analyzed [
23]. Sobhaniasl, M. et al. evaluated axial forces and fatigue in dynamic power cables connected to a 5 MW floating offshore wind turbine using ANSYS AQWA and FAST NREL (National Renewable Energy Laboratory) codes [
24]. Taninoki, R. et al. conducted behavior simulation tests on a dynamic power cable system, measuring strain on wire armor under tensile and bending loads. Forced oscillation tests confirmed that tensile-induced strain remained within safe limits, validating the cable’s ability to endure stress in floating platforms [
25]. Okpokparoro, S. et al. presented effective tension as a main parameter for failure risk assessment in floating platforms, linking effective tension to long-term reliability [
26]. Abrahamsen, A. B. et al. presented a reference dynamic power cable design, assessing maximum cable effective tension as a key failure mode [
27]. Yang, R. Y. et al. simulated two mooring system failure scenarios. The effective tension distribution range of the floating platform and anchor chain after the mooring system failure was analyzed [
28].
However, previous studies have primarily focused on the structural analysis of simple floating tidal power systems under normal sea conditions. While numerous papers have addressed the feasibility and static stability of single tidal power generators, studies analyzing the dynamic response of floating platforms and the effective tension in mooring lines under extreme environmental conditions remain limited. In particular, although mooring line failure scenarios have been extensively studied for floating offshore wind platforms, such analyses are scarce for tidal power floating platforms.
This study goes beyond a basic global analysis by conducting a comprehensive simulation that encompasses reliability assessments under extreme environmental conditions, considerations of mooring line failure scenarios, and integrated system analysis including dynamic power cables with dual vertical-axis turbines. By applying traditional analysis methodologies, this study offers a valuable reference for validating the applicability of floating dual vertical-axis tidal turbine systems and provides a foundation for an initial conceptual design.
2. Theoretical Background
In this chapter, this study’s theoretical background is explained briefly.
2.1. Governing Equations [29,30]
In the fluid area, the fluid flow is assumed to be inviscid, incompressible, and irrotational. If the flow is assumed to be inviscid, then it is simplified to the Euler equation; if potential flow is assumed, then it is derived to the Laplace Equation (1). In addition, since the kinetic energy and pressure change transmitted during wave oscillation are not greatly attenuated by viscosity, ignoring viscosity does not have a significant effect on the accuracy of wave analysis.
where velocity potential is
Φ, respectively. By inputting the (1) into the Navier–Stokes equation and integrating it, the Bernoulli equation for the fluid pressure over the wetted surface, as in (2), is obtained.
Bottom BC (Boundary Condition) at z = −∞, the vertical velocity of fluid particles at the sea bottom is zero.
Free surface at z = η(x, y, t), the pressure at sea is equal to atmospheric pressures.
Kinematic BC on the surface of a rigid body moving at z = η(x, y, t), fluid particles at the sea surface are at the sea surface.
This condition applies at the instantaneous free surface at z = η(x, y, t), which is defined by (2).
However, the exact solution of the governing equation is hard to obtain precisely due to the non-linearity of BC. So, the approximate solution is obtained based on the perturbation approach and used to calculate the wave load acting on the floating body. The approximate solution obtained using the perturbation approach is as follows [
31]:
2.2. Hydrodynamic Coefficients [32,33,34]
Hydrodynamic coefficients are numerical values that describe how a body behaves when moving through a fluid, such as seawater. The coefficients represent the relationship between the fluid forces and the motion of the body (such as velocity or acceleration). They are essential in predicting and analyzing the performance of floating structures.
Continuously, floating platforms take on additional fluid loads as they move due to pressure changes in the surrounding fluid called added mass/moment of inertia. Also, when a floating body moves, energy is dissipated as waves are generated on the surface. The following is Equation (8) related to the added mass/moment and radiation damping:
where
is added mass,
is radiation damping,
,
is normal velocity and fluid potential.
2.3. Wave Excitation Force
Wave excitation forces are split into two components such as Froude–Kriloff and diffraction forces as below. Froude–Kriloff forces, derived from pressure on the body due to undisturbed incident waves:
Diffraction forces result from wave field disturbance by the structure. For example, the vertical component is:
where
,
are vertical added mass and wave acceleration, respectively.
The complete wave excitation force, accounting for both effects in complex form, is:
Here, and represent the incident and scattered wave potentials. Due to the geometrical complexity of the platform, this must be evaluated numerically.
2.4. Time Domain Analysis in Orcaflex
The floating platform has generally six degrees of freedom, including three translational and three rotational motions. The equations describing this motion are expressed based on Newton’s law or Lagrange’s equations. The equations can be expressed as follows:
where
is structure mass, added mass, damping, restoring load, respectively.
is external load including wave, current, wind load. This equation includes mass, damping and restoring force, evaluated in time steps, and considers instantaneous and time-varying geometry.
consists of the first and second-order wave excitation force. Continuously, in random waves, wave load can be expressed using the Volterra series expansion.
(*) represent the complex conjugate. Also, mean linear transfer function (LTF), the difference ) and sum , frequency quadratic transfer function (QTF), accordingly.
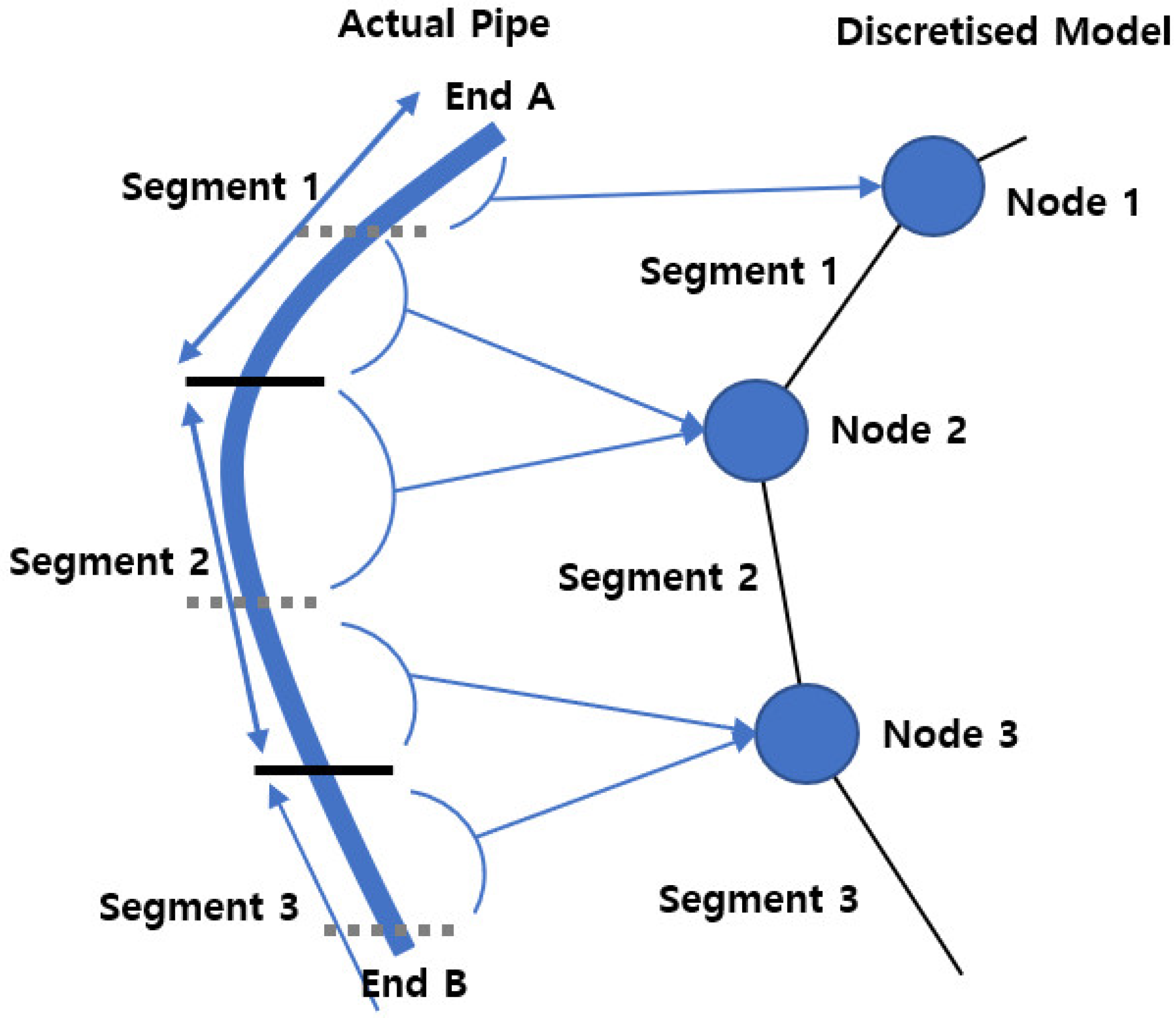
2.5. Lumped Mass Method for Mooring Line [34,35]
The lumped mass method, which is implemented in OrcaFlex, is used to model the mooring line as a series of beam elements. In this approach, each mooring line—assumed to behave like a beam—is divided into nodes and segments, as illustrated in
Figure 1. Forces such as weight, buoyancy, and drag are concentrated at each node (mass point), while massless springs are used to simulate the dynamic behavior of the mooring line. The Morison equation is applied to calculate the hydrodynamic forces acting on the line. Furthermore,
is Froude–Krylov force,
is hydrodynamic mass force, and
is drag force, respectively.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}