
Vibration Characterization of Ship Propulsion System Including Stern-Bearing Installation Errors

 and
and
Abstract
1. Introduction
2. Basic Equations
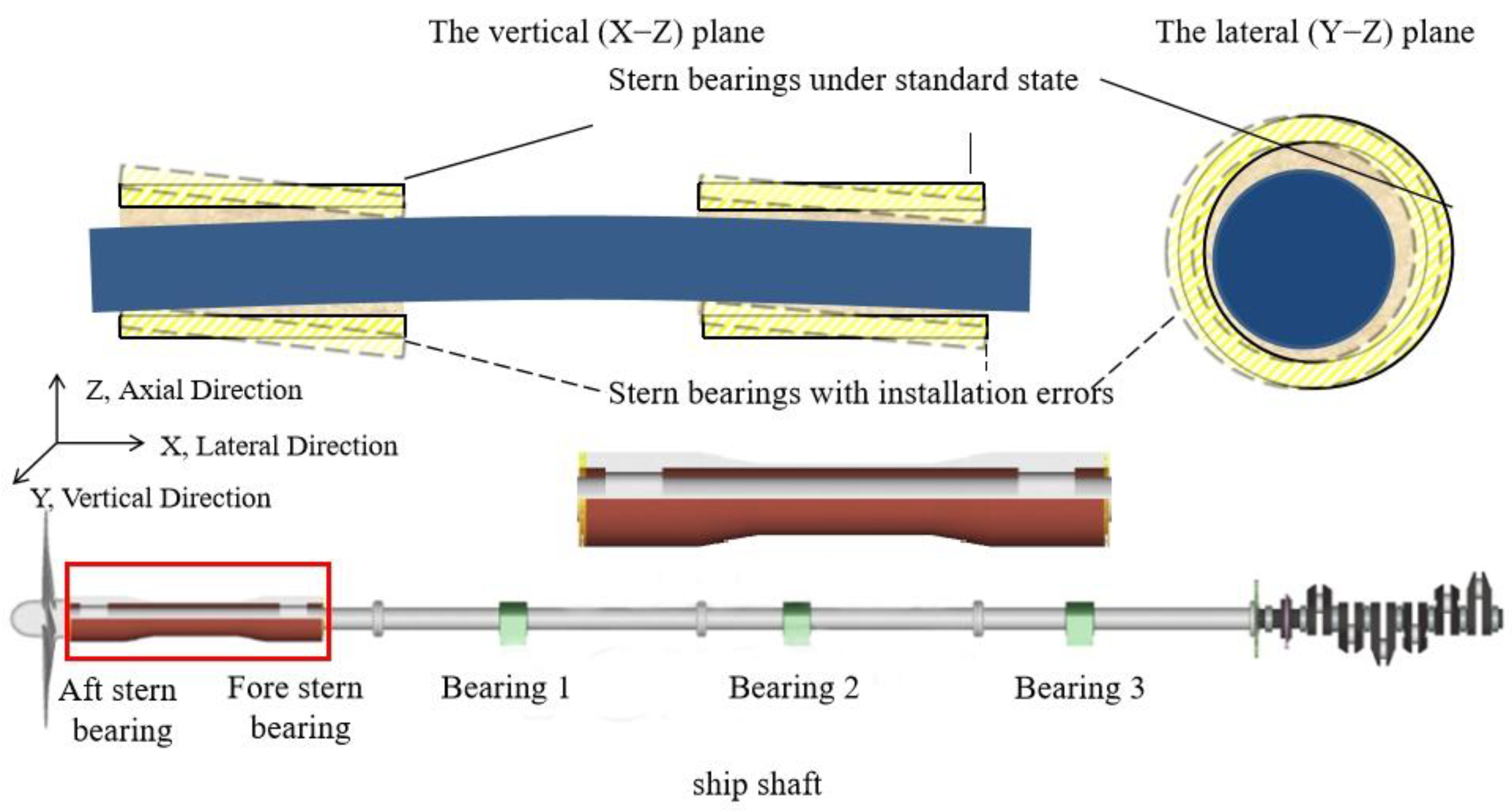
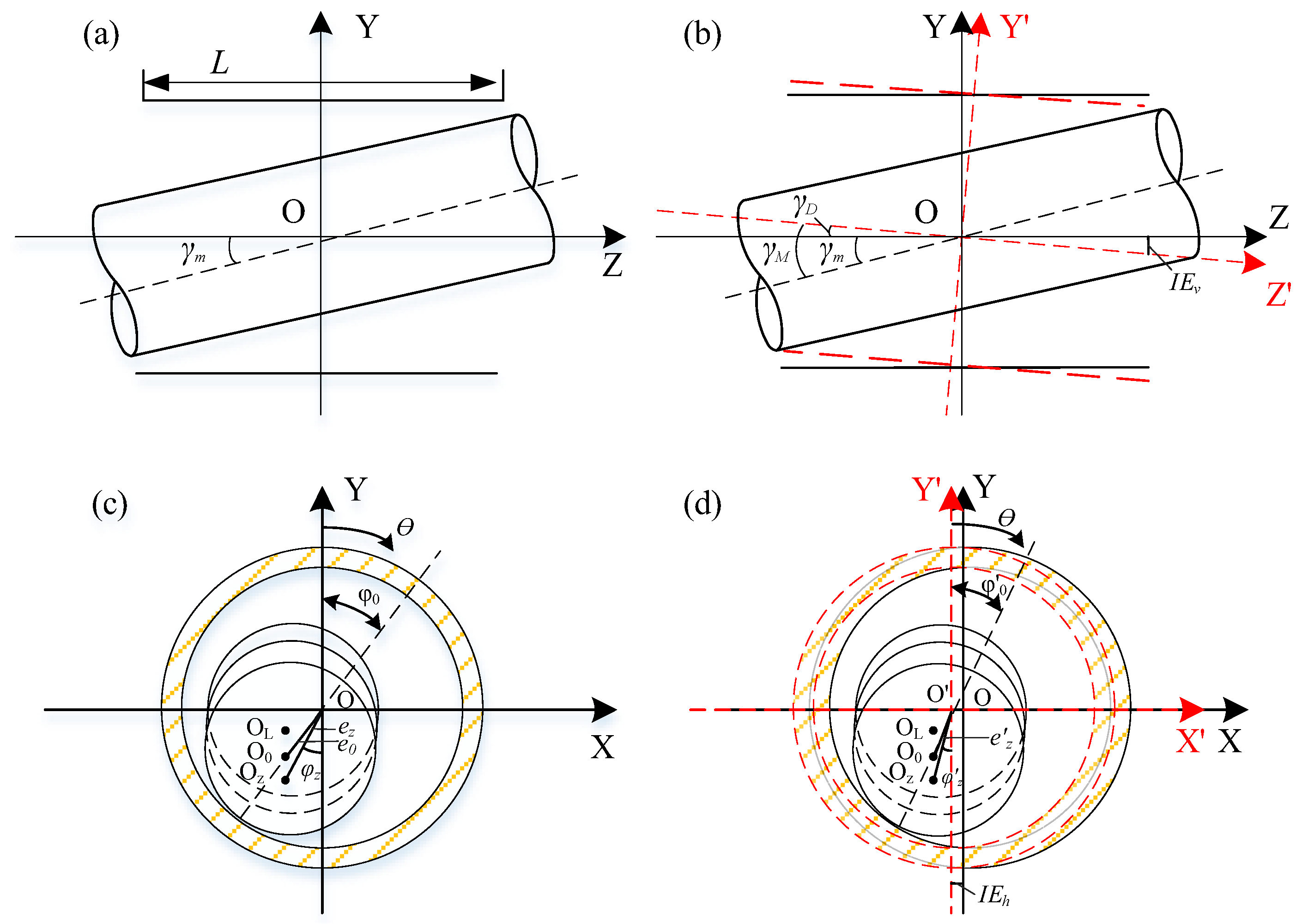
2.1. Mathematical Model of an Inclined Bearing with Installation Errors
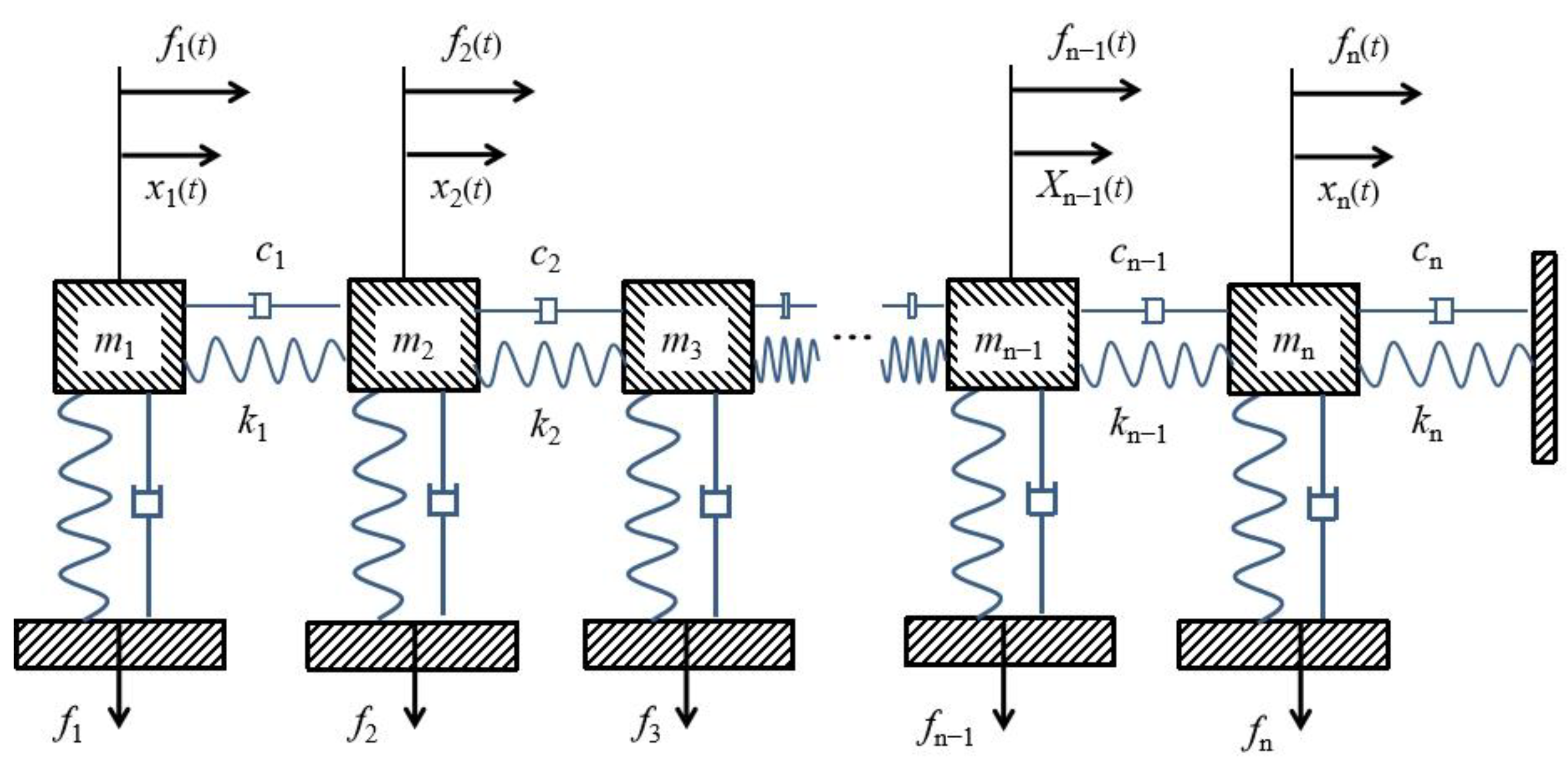
2.2. Equations of Motion for Multi-Degree-of-Freedom Systems
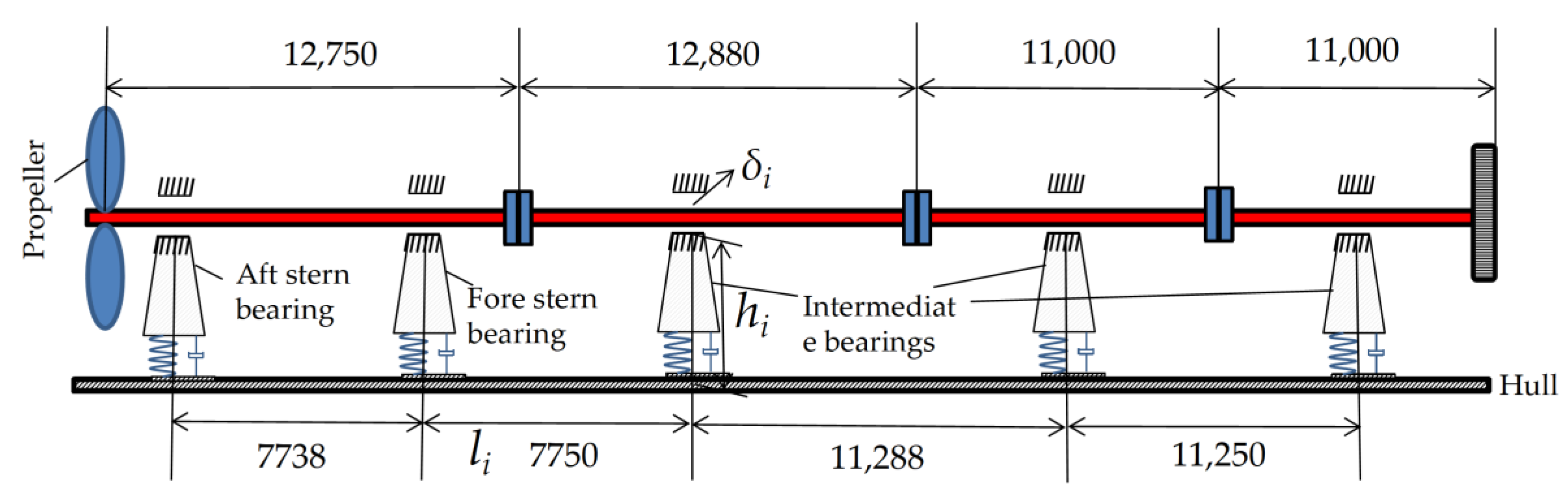
2.3. Motion Equation for Shaft System Considering Bearing Installation Errors
3. Numerical Solution and Model Verification
- (1)
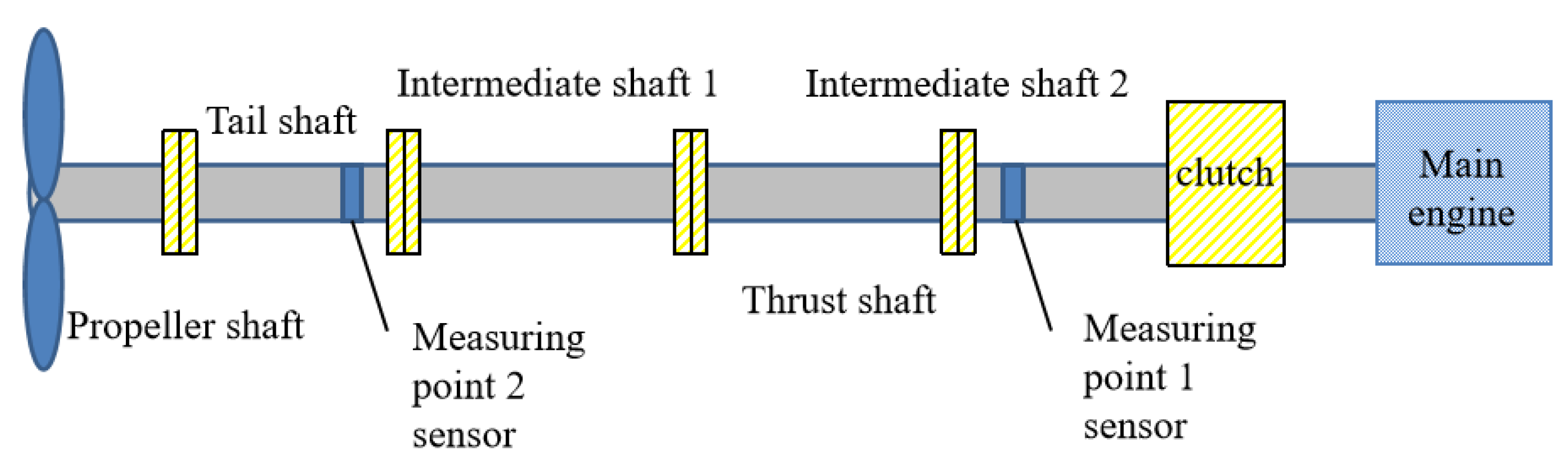
- Carrying out the assembly of test bench components, calculating the distance between the tail bearing and the middle bearing in equal proportions, adjusting the position of the middle bearing, and marking the initial elevation and lateral position of the bearing.
- (2)
- Connect the loading device, testing device, record output device, and other test bench systems.
- (3)
- Apply the propeller excitation force through the loading device, and the test motor speeds are 80 r/min, 85 r/min, 90 r/min, 95 r/min, 100 r/min, 105 r/min, 110 r/min, 115 r/min, 120 r/min, 125 r/min, 130 r/min, 135 r/min, 140 r/min, 145 r/min, 150 r/min, 155 r/min, 160 r/min, 165 r/min, 170 r/min, 175 r/min, 180 r/min, 185 r/min, 190 r/min, 195 r/min, and 200 r/min.
- (4)
- Run the test bench sequentially at different speeds, and collect the vibration signals at test point 1 and test point 2 when the test bench system is working stably.
4. Discussion
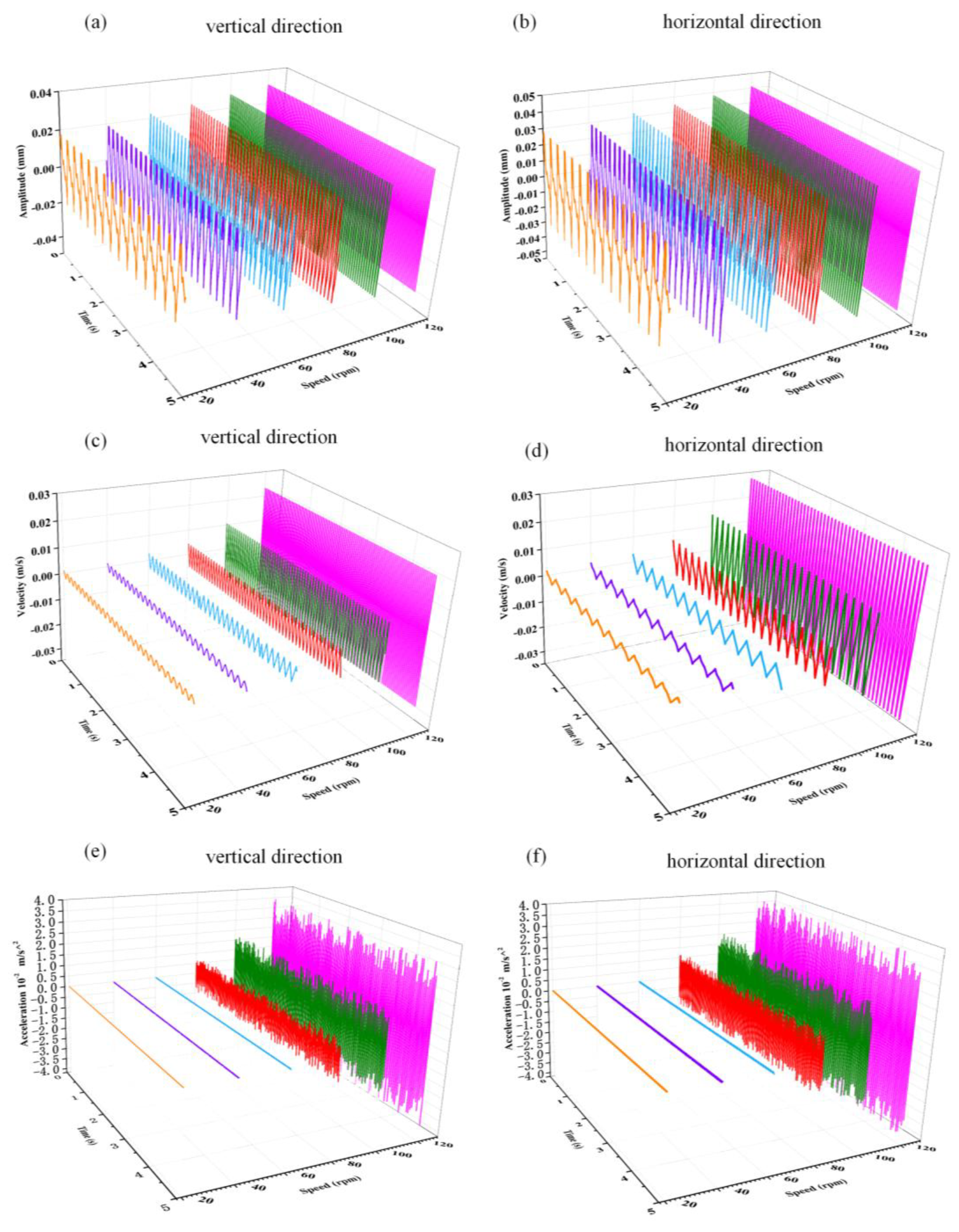
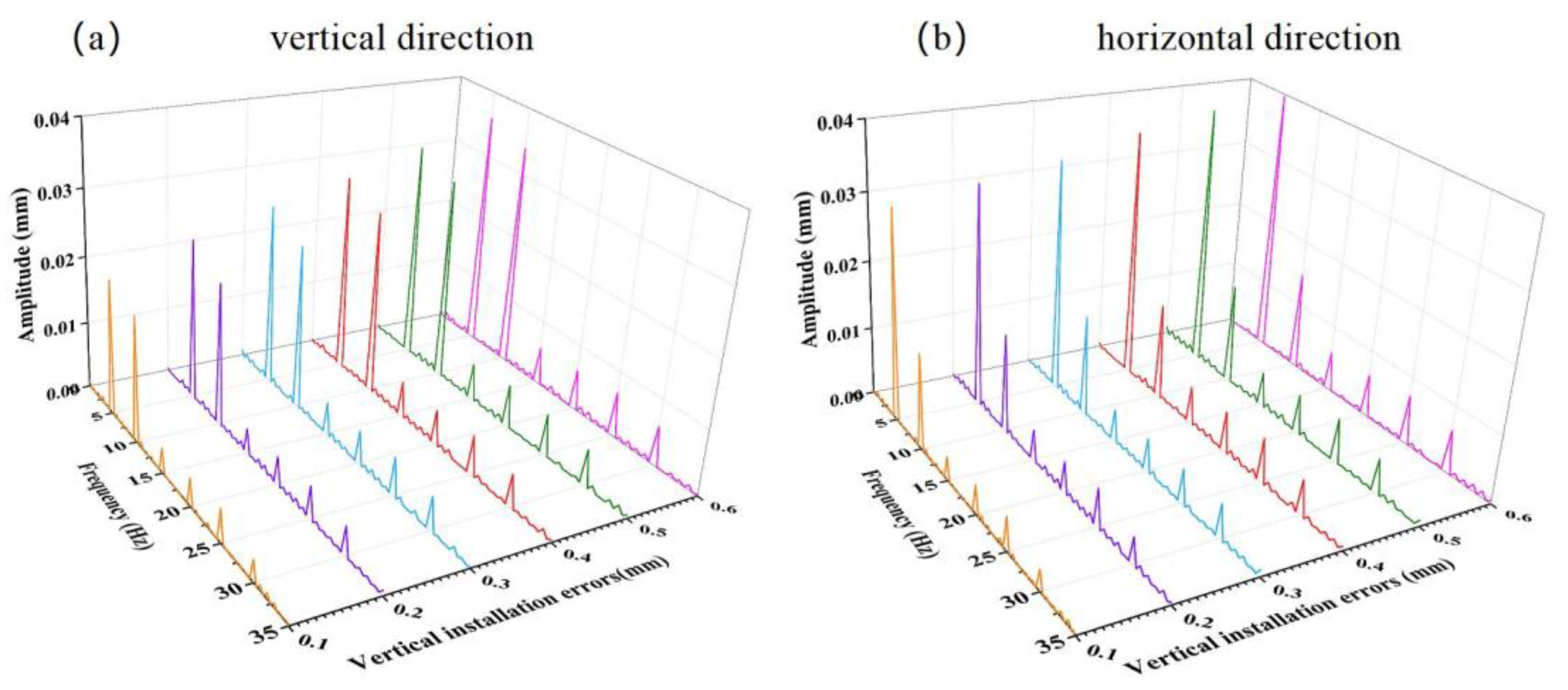
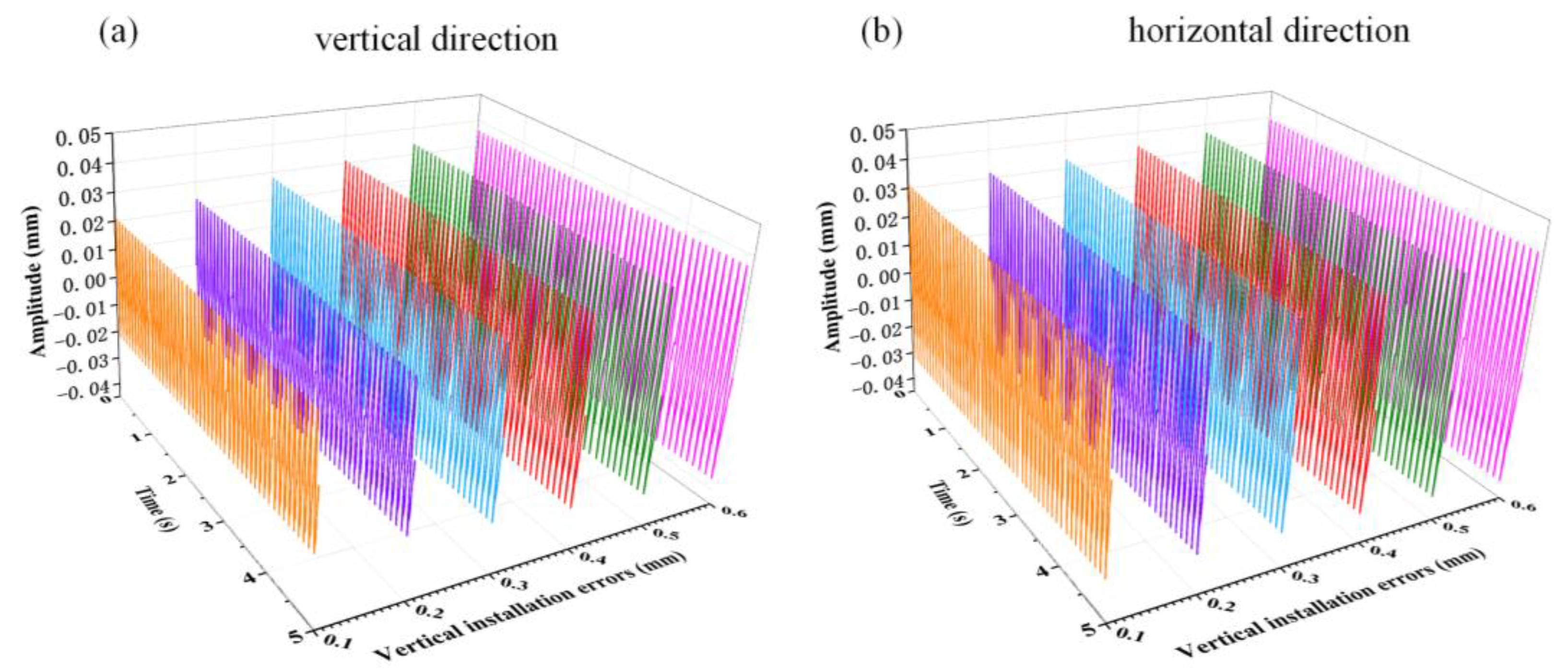
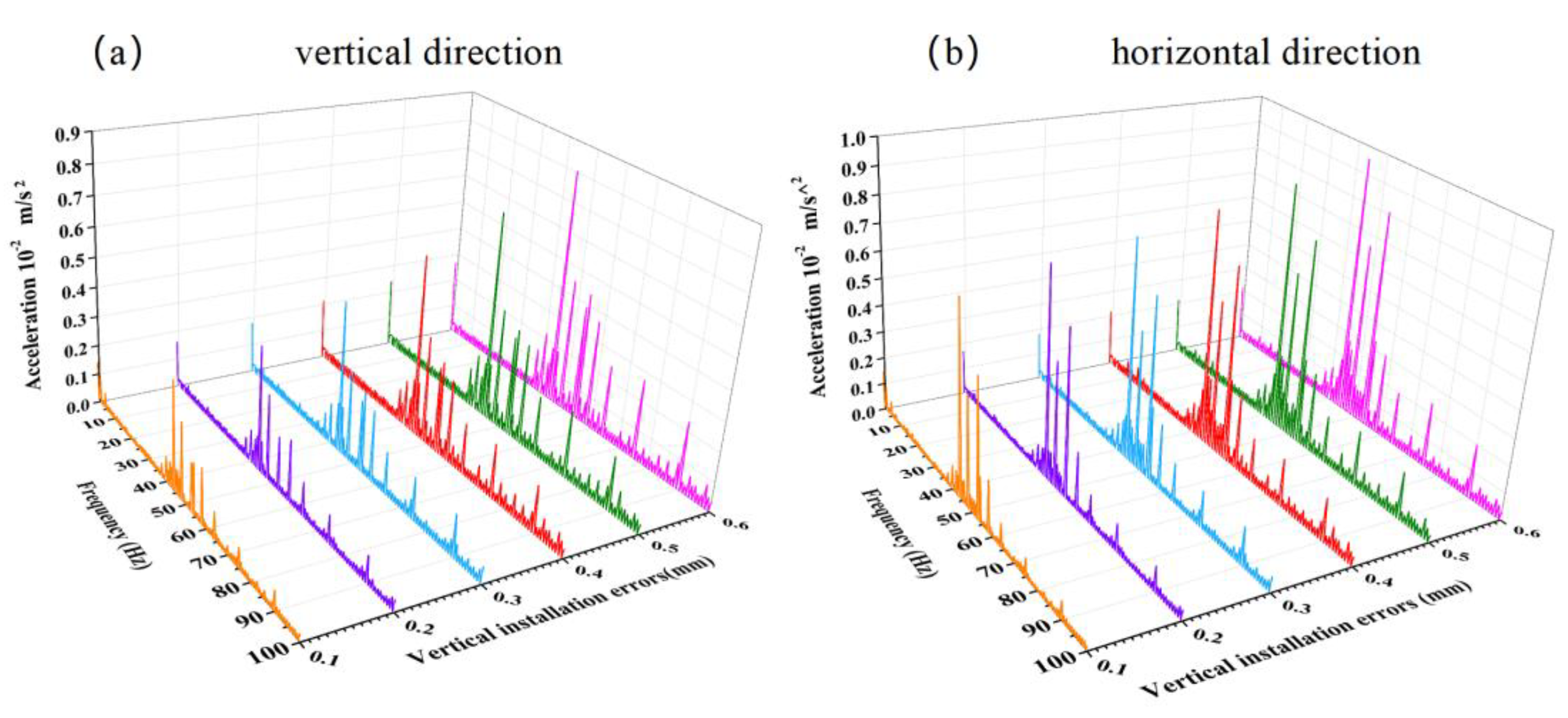
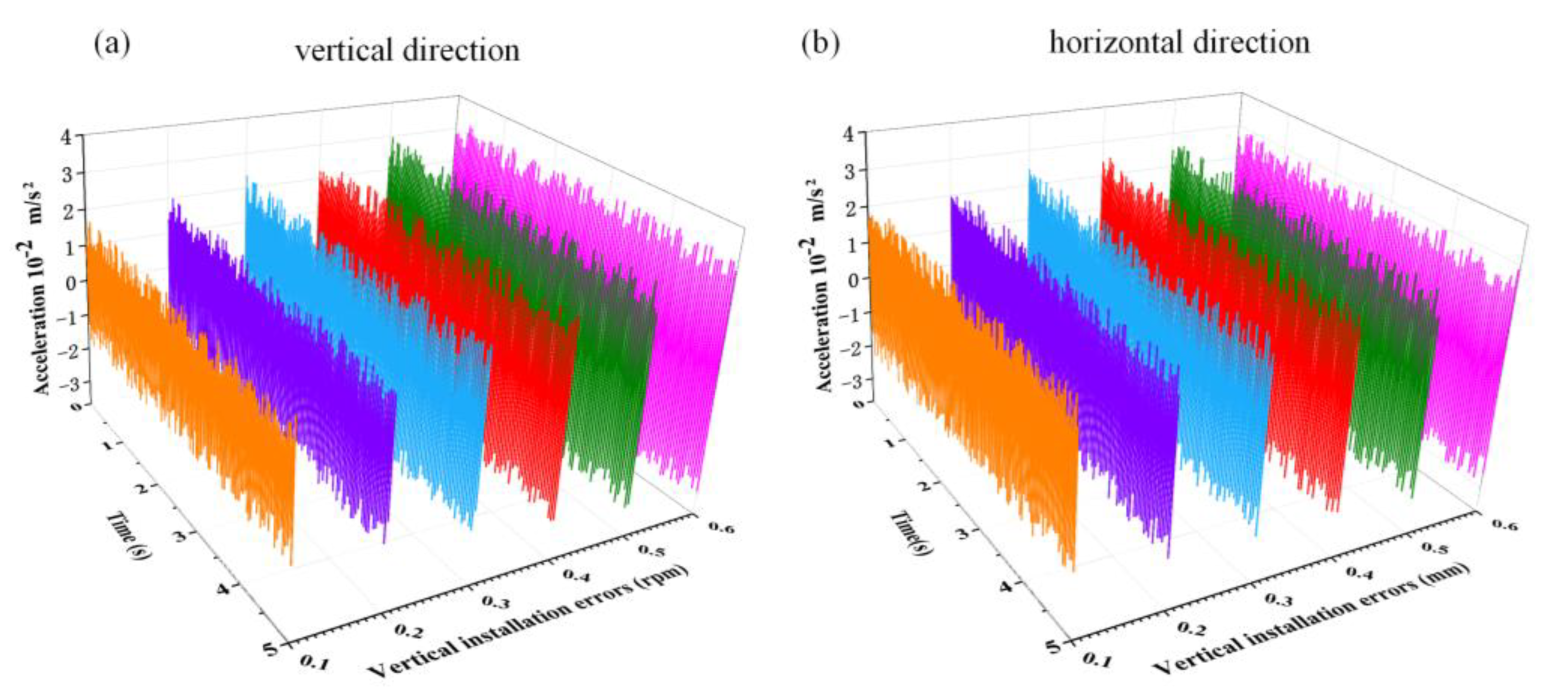
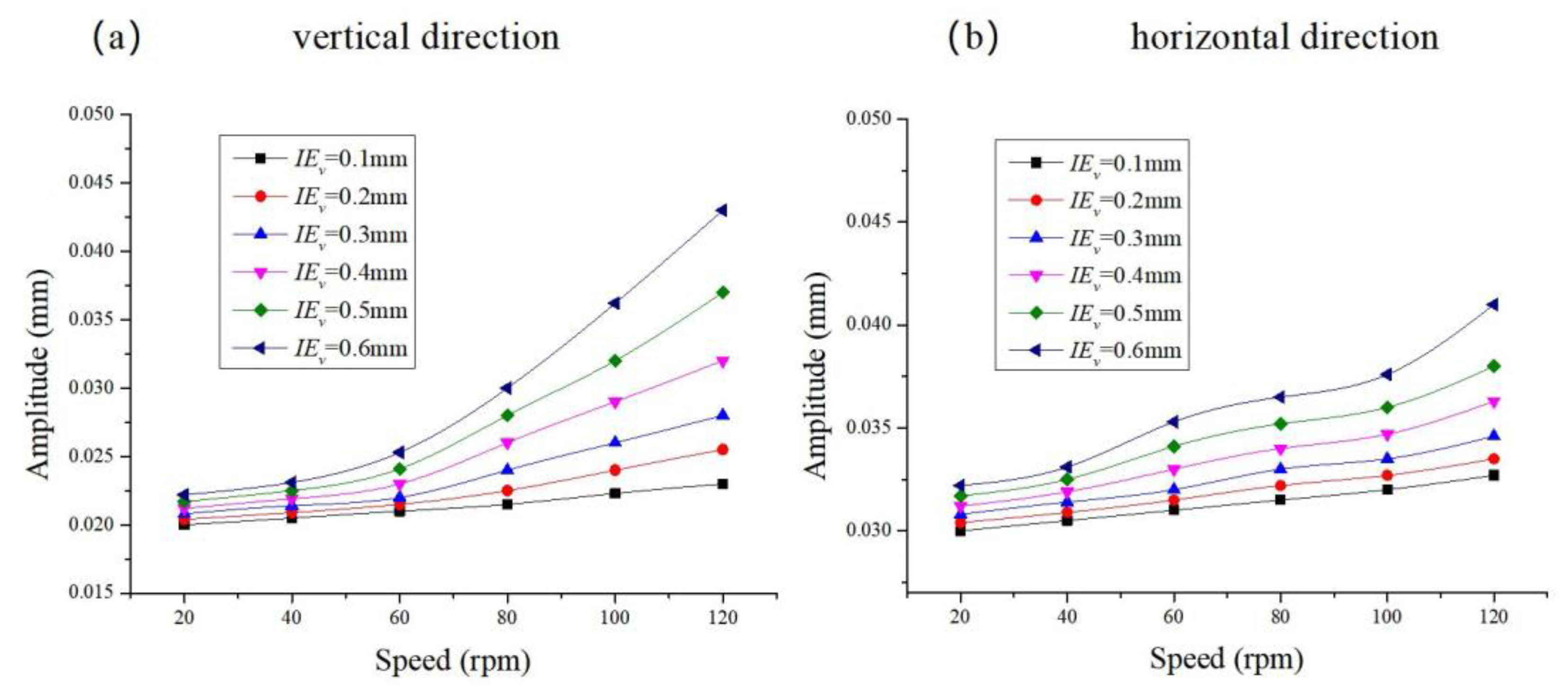
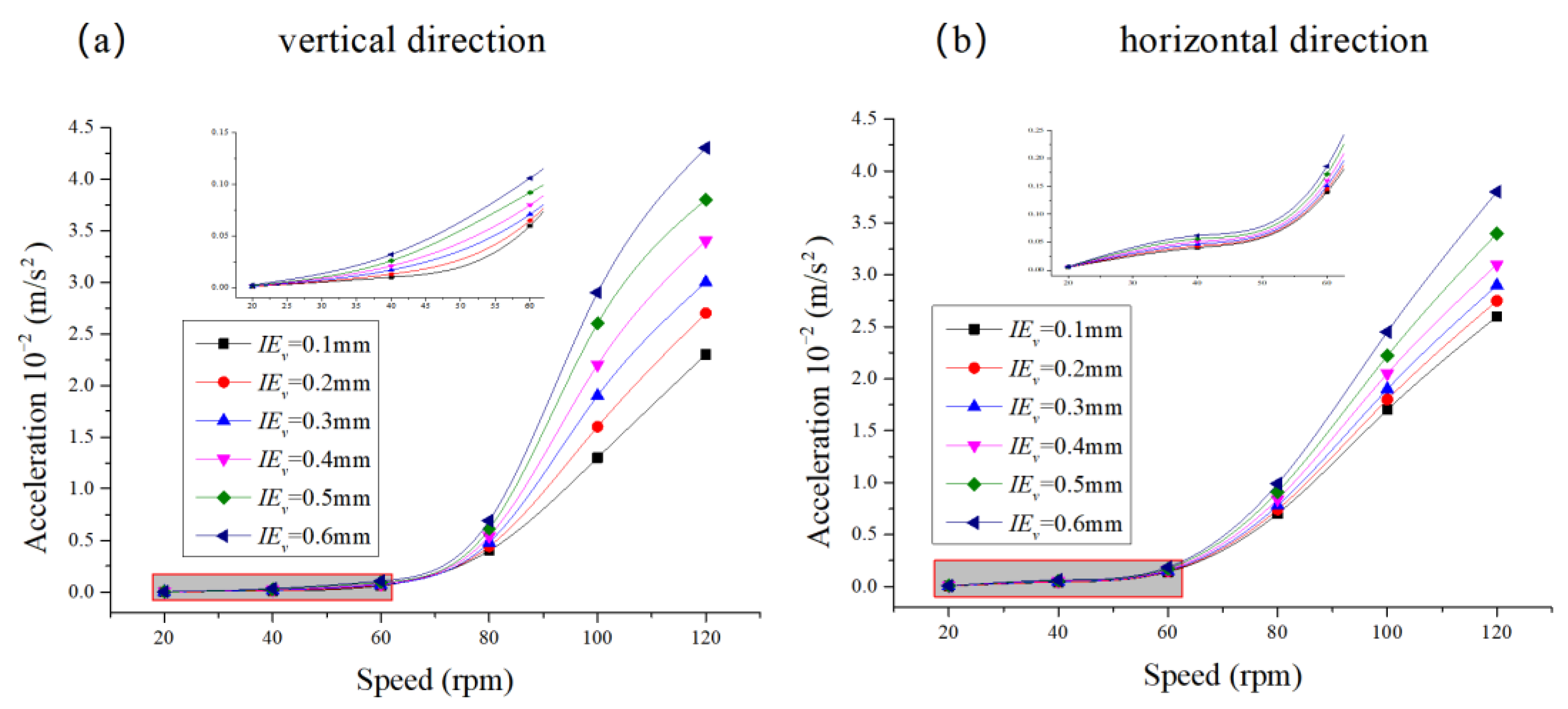
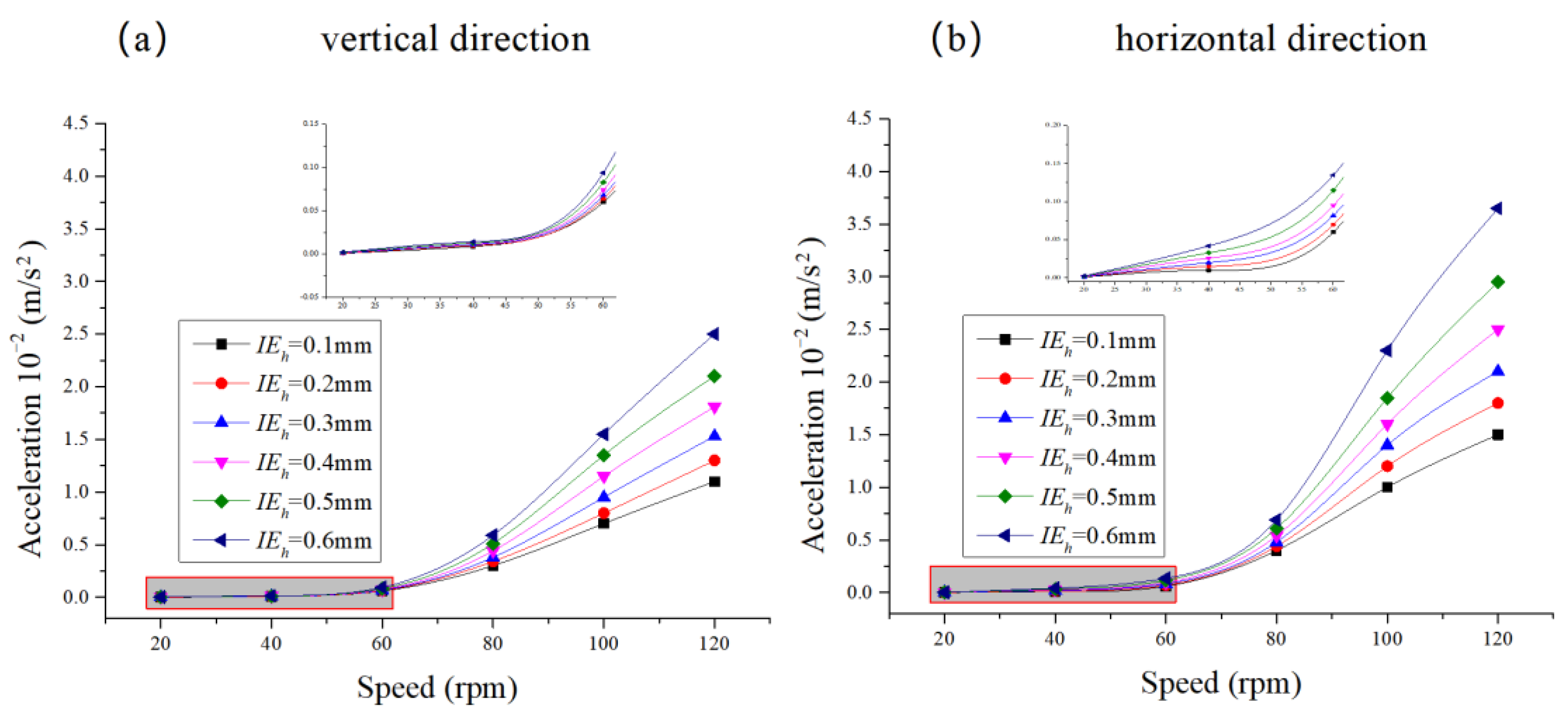
4.1. Analysis of the Impact of Bearing Vertical Installation Errors on Vibration
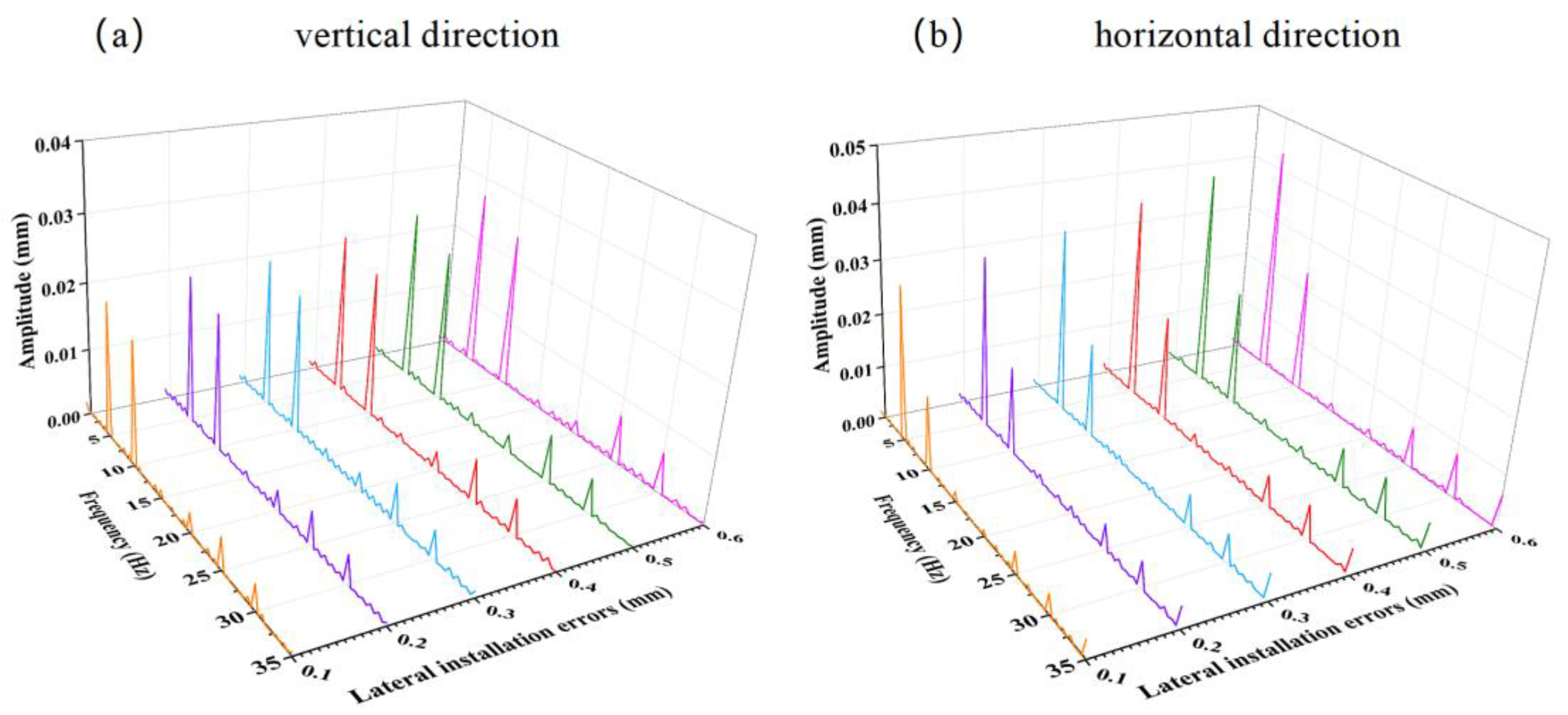
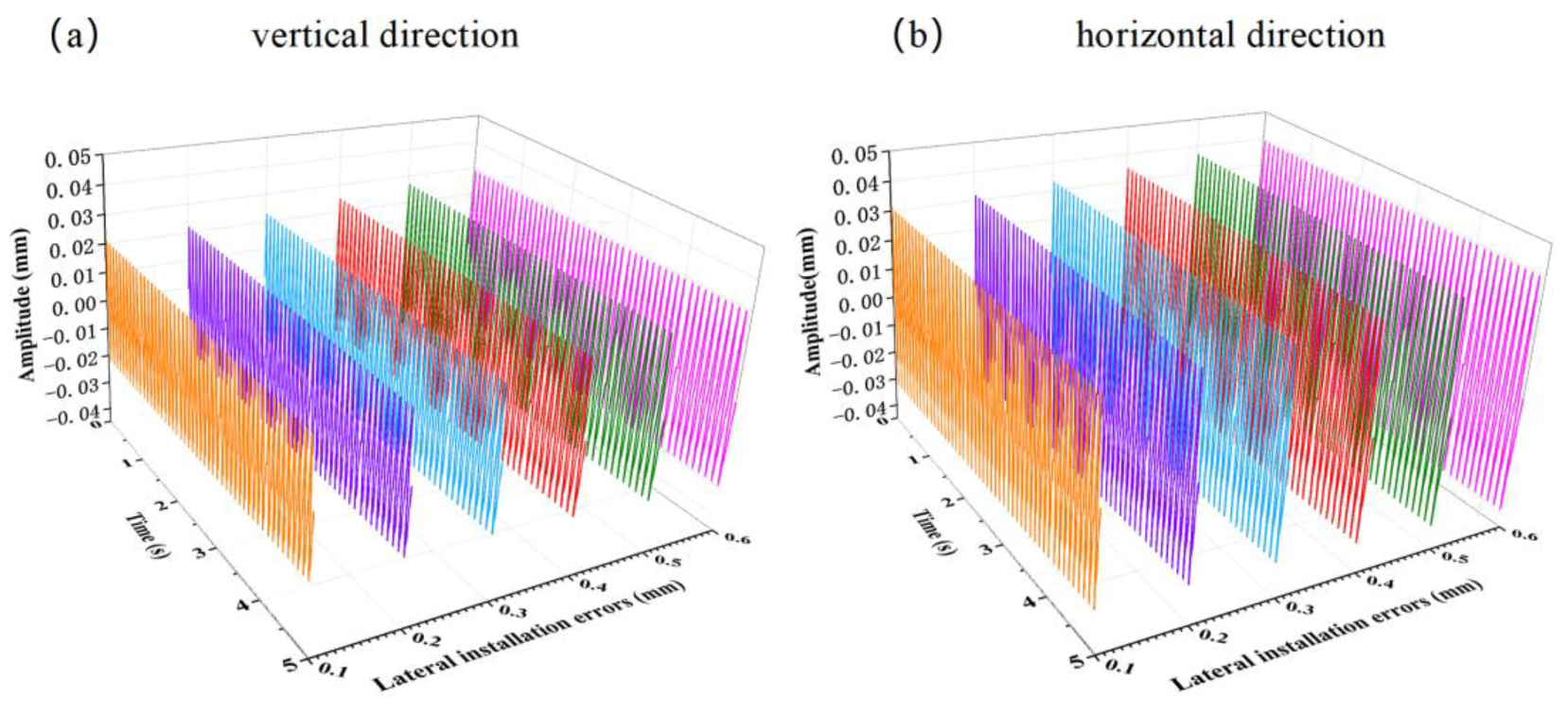
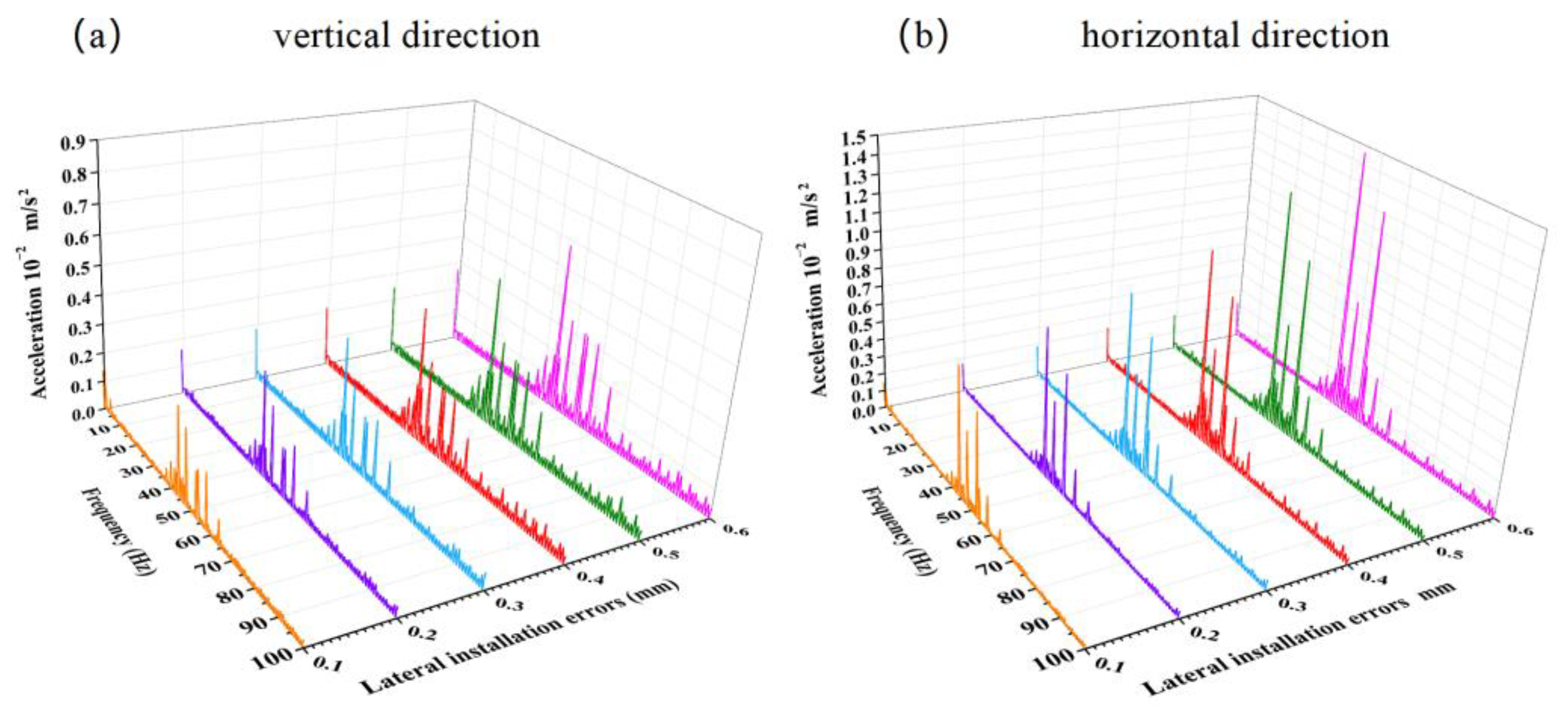
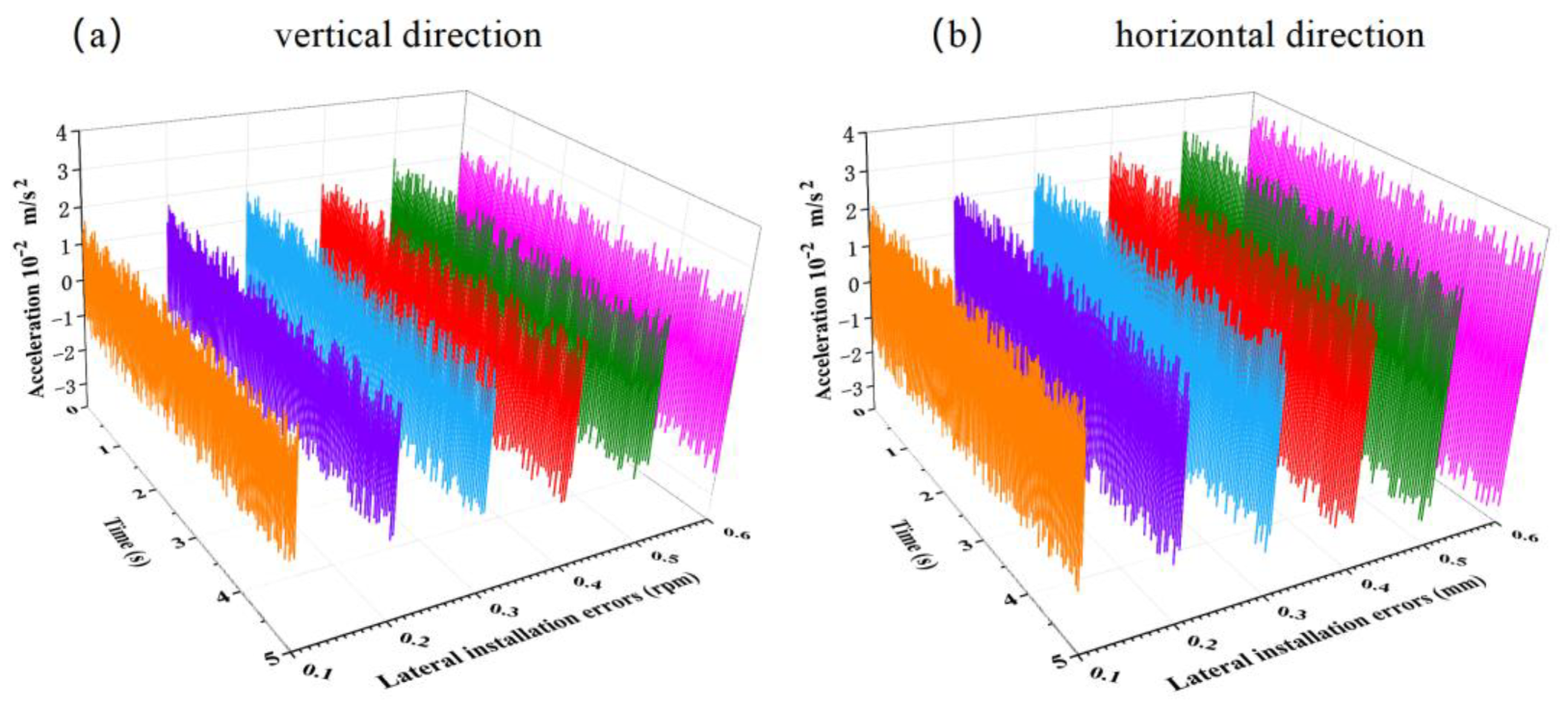
4.2. Analysis of the Impact of Bearing Lateral Installation Errors on Vibration
5. Conclusions
- (1)
- As the bearing vertical installation error increases, the increase in vibration amplitude in both the vertical and horizontal directions becomes more significant. The effect of vertical installation errors on the vertical vibration amplitude is more pronounced than on the horizontal direction. The impact on vibration acceleration also increases, with a greater increase in vertical vibration acceleration compared to the horizontal direction. The vertical vibration acceleration is more sensitive to bearing vertical installation errors than the horizontal direction.
- (2)
- As the bearing lateral installation error increases, the increase in vibration amplitude is more significant in the horizontal direction than in the vertical direction. The sensitivity of the horizontal vibration amplitude to bearing lateral installation errors is greater than in the vertical direction.
- (3)
- As the bearing lateral installation error grows, the increase in vibration acceleration amplitude in both the vertical and horizontal directions becomes more pronounced. The effect of the bearing lateral installation errors on the vibration acceleration of the propeller shaft system increases, with a larger increase in vibration acceleration in the horizontal direction compared to the vertical direction. The horizontal vibration acceleration is more sensitive to lateral installation errors than the vertical vibration acceleration.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| radial inclination angle | |
| angular velocity | |
| circumferential angle | |
| centers of axial end-plane | |
| axial mid-plane | |
| each axial section, respectively | |
| attitude angle | |
| eccentricity at the axial mid-plane | |
| eccentricity of the middle section | |
| eccentricity of each section | |
| vertical installation error | |
| lateral installation error | |
| discrete system: the generalized mass | |
| discrete system: the generalized damping | |
| discrete system: the generalized stiffness | |
| generalized acceleration | |
| generalized velocity | |
| generalized displacement | |
| generalized force | |
| mass matrix | |
| damping matrix | |
| stiffness matrix | |
| single mass | |
| damping | |
| stiffness | |
| the amplitudes of each degree of freedom in the system’s motion | |
| the initial phase | |
| the bearing diameter | |
| the bearing clearance | |
| the shaft speed | |
| the section’s eccentricity | |
| the bearing radius | |
| the radial force of the bearing | |
| the tangential force of the bearing | |
| the resultant force acting on the bearing | |
| the force along the Y axis | |
| the force along the Z axis | |
| the bearing’s displacement along the Y axis | |
| the displacement along the Z axis | |
| the vertical moment of inertia | |
| the horizontal moment of inertia | |
| the vertical force of the propeller | |
| the horizontal force | |
| time interval | |
| the time region for solving the vibrating system’s motion equation | |
| the acceleration of the vibrating system | |
| the velocity of the vibrating system | |
| the displacement of the vibrating system |
References
- Yang, T.; Zhu, H.; Fan, S.; Wu, J.; Yuan, J.; Zheng, L. Research on Lubrication Characteristics of Ship Stern Bearings Considering Bearing Installation Errors. Lubricants 2023, 11, 478. [Google Scholar] [CrossRef]
- Wu, C.; Long, X.; Shang, D.; Chen, F. Investigation on the influence of bearing certainty and random elevation on the friction self-excited vibration of ship propeller shaft system. J. Sound Vib. 2025, 608, 119034. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Wang, K.; Jin, H.; Liu, W.; Li, Z. Nonlinear vibration of a propeller propulsion shafting with frictional and magnetic excitations of journal and thrust bearings. Mech. Syst. Signal Process. 2025, 230, 112660. [Google Scholar] [CrossRef]
- Guo, Y.; Zhou, R.; Ma, Z.; Wang, J.; Ding, L. Research on the Dynamic Response Characteristics of the Propulsion Shaft System with an On-Shaft Generator in Ships. Appl. Sci. 2024, 14, 6769. [Google Scholar] [CrossRef]
- Lu, L.; Li, G.; Xing, P.; Gao, H.; Song, Y. A review of stochastic finite element and nonparametric modelling for ship propulsion shaft dynamic alignment. Ocean. Eng. 2023, 286, 115656. [Google Scholar] [CrossRef]
- Li, C.; Hao, W.; Lei, W.; Liu, M.; Hua, H. Vibro-acoustic responses of a hull due to structural and acoustic excitations from a propeller. Ocean. Eng. 2023, 276, 114168. [Google Scholar] [CrossRef]
- Zou, D.; Zhang, J.; Ta, N.; Rao, Z. Study on the axial exciting force characteristics of marine propellers considered the effect of the shaft and blade elasticity. Appl. Ocean. Res. 2019, 89, 141–153. [Google Scholar] [CrossRef]
- Shu, M.-H.; Chen, K.; You, Y.-X.; Hu, T.-Q.; Wang, R.-F. Numerical study on variation characteristics of the unsteady bearing forces of a propeller with an external transverse excitation. J. Hydrodyn. 2019, 31, 400–412. [Google Scholar] [CrossRef]
- Aliasghar, M.; Mohammadreza, G.; Alireza, N.; Hassan, B. Investigating the effect of blade tip bending (winglet) on efficiency and occurrence of cavitation of a submerged propeller. Ocean. Eng. 2025, 319, 120254. [Google Scholar]
- Anna Maria, K.; Sverre, S.; Lynn Rebecca, M. Slamming and dynamic loads of marine propellers operating under partially submerged conditions. Ocean. Eng. 2025, 335, 121733. [Google Scholar]
- Zou, D.; Lv, F.; Ta, N.; Rao, Z. Study on bearing force of marine propeller induced by longitudinal vibration of propulsion-shafting. Ships Offshore Struct. 2020, 15, 162–173. [Google Scholar] [CrossRef]
- Zou, D.; Zhang, J.; Liu, G.; Ta, N.; Rao, Z. Study on characteristics of propeller exciting force induced by axial vibration of propulsion shafting: Theoretical analysis. Ocean. Eng. 2020, 202, 106942. [Google Scholar] [CrossRef]
- Wu, J.-S.; Sheu, J.-J. An Exact Solution for Whirling Speeds and Mode Shapes of Multi-span Rotating Shafts with Each Span Carrying a Number of Rigid Disks. J. Vib. Eng. Technol. 2022, 10, 149–174. [Google Scholar] [CrossRef]
- Guo, X.; Su, Z.; Wang, L. Modified Fourier Approach for Vibration Analysis of Spinning Beam with Elastic Restraints. Int. J. Struct. Stab. Dyn. 2023, 23, 2350142. [Google Scholar] [CrossRef]
- Guan, H.; Ma, H.; Chen, X.; Mu, Q.; Zeng, Y.; Chen, Y.; Wen, B.; Guo, X. Nonlinear vibration of rotor-bearing system considering base-motion and bearing-misalignment. Mech. Mach. Theory 2025, 206, 105933. [Google Scholar] [CrossRef]
- Hu, W.; Zhang, X.; Chen, C.; Li, Z.; Zhang, J.; Li, M. Stability and self-balancing characteristic of an internal drive vibrating system with three unbalanced rotors. J. Sound Vib. 2024, 574, 118232. [Google Scholar] [CrossRef]
- Sharma, S.K.; Sharma, R.C.; Upadhyay, R.K.; Lee, J. Coupled Torsional–Transverse Vibration Reduction in Marine Propulsion Dynamics with Novel Approach Using Magnetorheological Damping and Adaptive Control System. J. Vib. Eng. Technol. 2024, 12, 6089–6099. [Google Scholar] [CrossRef]
- Zhang, S.; Nan, Y.; Zhang, Y.; Xiang, C.; Vu, M.T. Model Predictive Control of Counter-Rotating Motors for Underwater Vehicles Considering Unbalanced Load Variation. J. Mar. Sci. Eng. 2024, 12, 330. [Google Scholar] [CrossRef]
- Zhang, W.; Li, F.; Guo, H.; Sun, S. Vibrations of simplified rudder induced by propeller wake. Phys. Fluids 2021, 33, 083618. [Google Scholar] [CrossRef]
- Yu, P.; Hou, L.; Jiang, K.; Jiang, Z.; Tao, X. Dynamic modeling and nonlinear analysis for lateral–torsional coupling vibration in an unbalanced rotor system. Appl. Math. Model. 2024, 126, 439–456. [Google Scholar] [CrossRef]
- Li, F.; Zhai, L.; Cui, B.; Guo, J.; Chen, G. Investigation of the dynamic characteristics of an eccentric annular seal on the basis of a transient cfd method with three whirl models. J. Mar. Sci. Eng. 2021, 9, 1290. [Google Scholar] [CrossRef]
- Jungblut, J.; Haas, J.; Rinderknecht, S. Active vibration control of an elastic rotor by using its deformation as controlled variable. Mech. Syst. Signal Process. 2022, 165, 108371. [Google Scholar] [CrossRef]
- Constanza, A.; Luca, T.; Diego, S.; Doris, S. Torsional Vibrations Reduction in More Electric Ships Propellers Using Model Predictive Control. IEEE Trans. Ind. Appl. 2025, 61, 737–748. [Google Scholar]
- Saeid, N.; Seyed Mohammadreza, H.; Hasan, B.; Saeid, A. Marine shaft optimization using surrogate models and multi-objective optimization. Structures 2024, 63, 106415. [Google Scholar]
- Zheng, L.; Zhu, H.; Zhu, J.; Deng, Y. Effects of oil film thickness and viscosity on the performance of misaligned journal bearings with couple stress lubricants. Tribol. Int. 2020, 146, 106229. [Google Scholar] [CrossRef]
- Zheng, L.; Zhu, H.; Fan, S.; Yang, T. Effects of axial motion and couple stress on lubrication performances of ship stern shaft. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2022, 236, 1232–1243. [Google Scholar] [CrossRef]
- Meng, C.-L.; Shuai, Z.-J.; Yu, T.; Ren, K.-X.; Jian, J.; Wang, X.; Wang, D.-H.; Li, W.-Y.; Jiang, C.-X. Numerical study on unsteady propeller exciting characteristics considering shafting whirling vibration effect. Ocean. Eng. 2023, 278, 114283. [Google Scholar] [CrossRef]
- Dong, L.; Li, J. Coupled vibration characteristics of marine shafting with complex change of inclination under ice loads. Adv. Mech. Eng. 2023, 15, 16878132231216676. [Google Scholar] [CrossRef]
- Yang, L.-H.; Mao, Z.; Wu, S.-M.; Chen, X.-F.; Yan, R.-Q. Steady-state coupling vibration analysis of shaft–disk–blade system with blade crack. Nonlinear Dyn. 2021, 105, 61–98. [Google Scholar] [CrossRef]
- Yu, G.-F.; Chiu, Y.; Yang, C.-H.; Sheng, J. Exploration of coupled-vibration phenomena in multi-disk rotor with blades with multi-cracks. Adv. Mech. Eng. 2019, 11, 168781401983739. [Google Scholar] [CrossRef]
- She, H.; Li, C.; Tang, Q.; Wen, B. The investigation of the coupled vibration in a flexible-disk blades system considering the influence of shaft bending vibration. Mech. Syst. Signal Process. 2018, 111, 545–569. [Google Scholar] [CrossRef]
- Huang, Q.; Yan, X.; Wang, Y.; Zhang, C.; Wang, Z. Numerical modeling and experimental analysis on coupled torsional-longitudinal vibrations of a ship’s propeller shaft. Ocean. Eng. 2017, 136, 272–282. [Google Scholar] [CrossRef]
- Lin, X. Research on Key Factors and Mechanism of Gyratory Vibration of Ship Propulsion Shaft. Ph.D. Thesis, Wuhan University of Technology, Wuhan, China, 2016. [Google Scholar]
- Lin, X.; Zhou, R.; Xiao, N. Study on the influence characteristics of connector misalignment on shafting gyratory vibration. J. Ship Mech. 2016, 20, 866–873. [Google Scholar]
- Lin, X.; Zhou, R.; Xiao, N. Effect of oil film bearing load on gyratory vibration of ship propulsion shaft. J. Wuhan Univ. Technol. (Transp. Sci. Eng.) 2015, 39, 1237–1240. [Google Scholar]
- Zhang, C.; Tan, W.; Tian, Z. Effect of hull deformation on shafting characteristics of an 8530 TEU container ship. Mar. Eng. 2017, 46, 116–121. [Google Scholar]
- Tian, Z. Research on Shafting Vibration Modeling of Large Ship Considering Hull Deformation and Main Engine Excitation. Ph.D. Thesis, Wuhan University of Technology, Wuhan, China, 2016. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Shaft neck diameter (m) | 0.88 |
| Bearing width (m) | 1.1 |
| Radial clearance (mm) | 0.8 |
| Rotational speed (rpm) | 104 |
| Lubricating oil viscosity (Ps) | 0.0293 |
| Parameter | Value |
|---|---|
| Material | The properties of each shaft section are known from the ship’s design manual, and the material is 34CrMo. |
| Volume density (kg/m³) | 7800 |
| Elastic modulus (GPa) | 207 |
| Poisson’s ratio | 0.3 |
| Tensile strength (MPa) | 750 |
| Yield strength (MPa) | 600 |
| Parameter | Value |
|---|---|
| Material | Cu Al10Ni |
| Diameter (mm) | 8800 |
| Number of blades | 6 |
| Pitch ratio | 0.98 |
| Disk area ratio | 0.906 |
| Navigation | Constant pitch |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Fan, S.; Zhu, H.; Zhu, Y.; Weng, H.; Yuan, J.; Yang, T. Vibration Characterization of Ship Propulsion System Including Stern-Bearing Installation Errors. J. Mar. Sci. Eng. 2025, 13, 1241. https://doi.org/10.3390/jmse13071241
Zhou J, Fan S, Zhu H, Zhu Y, Weng H, Yuan J, Yang T. Vibration Characterization of Ship Propulsion System Including Stern-Bearing Installation Errors. Journal of Marine Science and Engineering. 2025; 13(7):1241. https://doi.org/10.3390/jmse13071241
Chicago/Turabian StyleZhou, Jianhua, Shidong Fan, Hanhua Zhu, Yulei Zhu, Hailong Weng, Junlang Yuan, and Taiwei Yang. 2025. "Vibration Characterization of Ship Propulsion System Including Stern-Bearing Installation Errors" Journal of Marine Science and Engineering 13, no. 7: 1241. https://doi.org/10.3390/jmse13071241
APA StyleZhou, J., Fan, S., Zhu, H., Zhu, Y., Weng, H., Yuan, J., & Yang, T. (2025). Vibration Characterization of Ship Propulsion System Including Stern-Bearing Installation Errors. Journal of Marine Science and Engineering, 13(7), 1241. https://doi.org/10.3390/jmse13071241