
A Salvage Target Tracking Algorithm for Unmanned Surface Vehicles Combining Improved Line-of-Sight and Key Point Guidance


Abstract
1. Introduction
- (1)
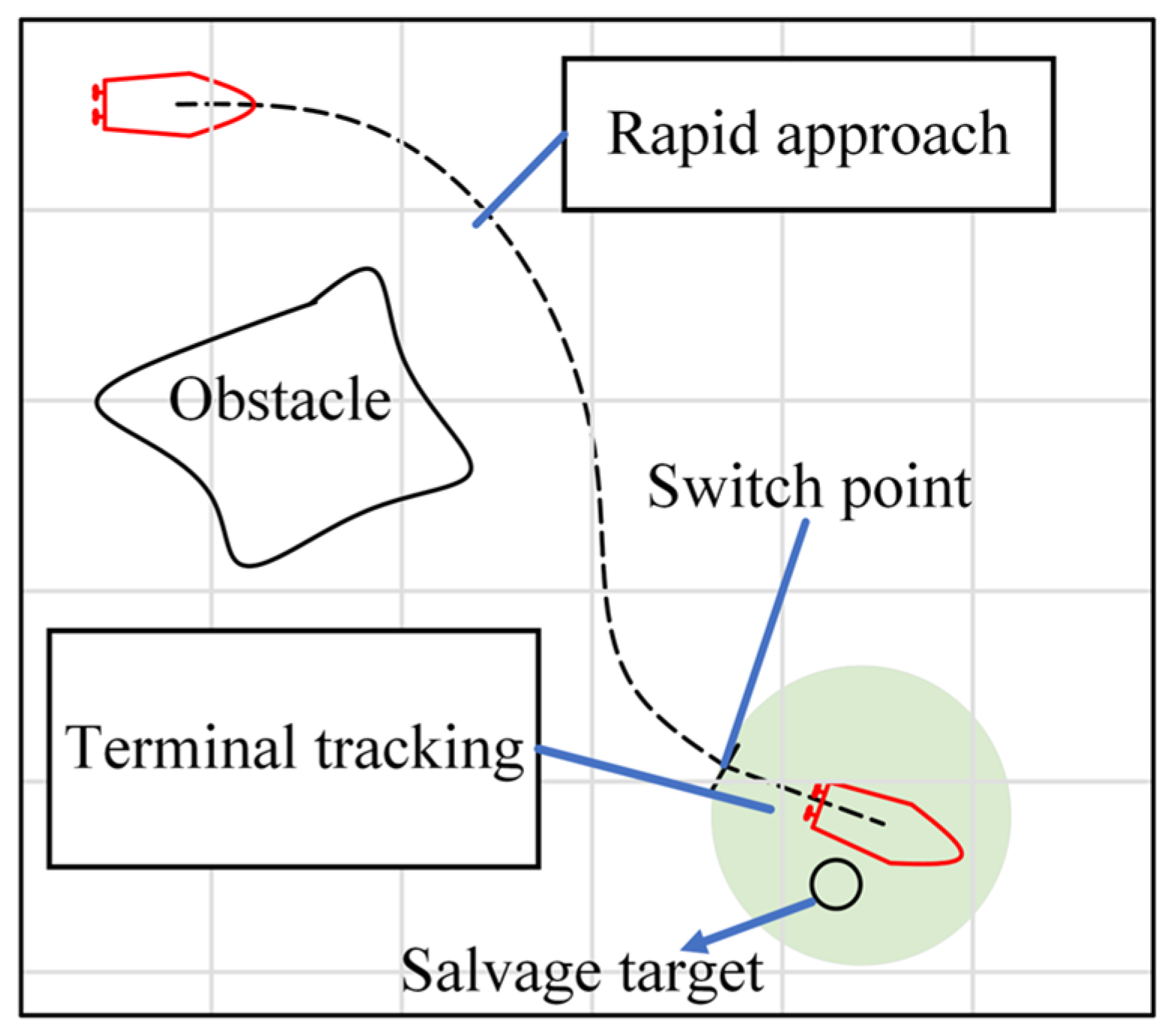
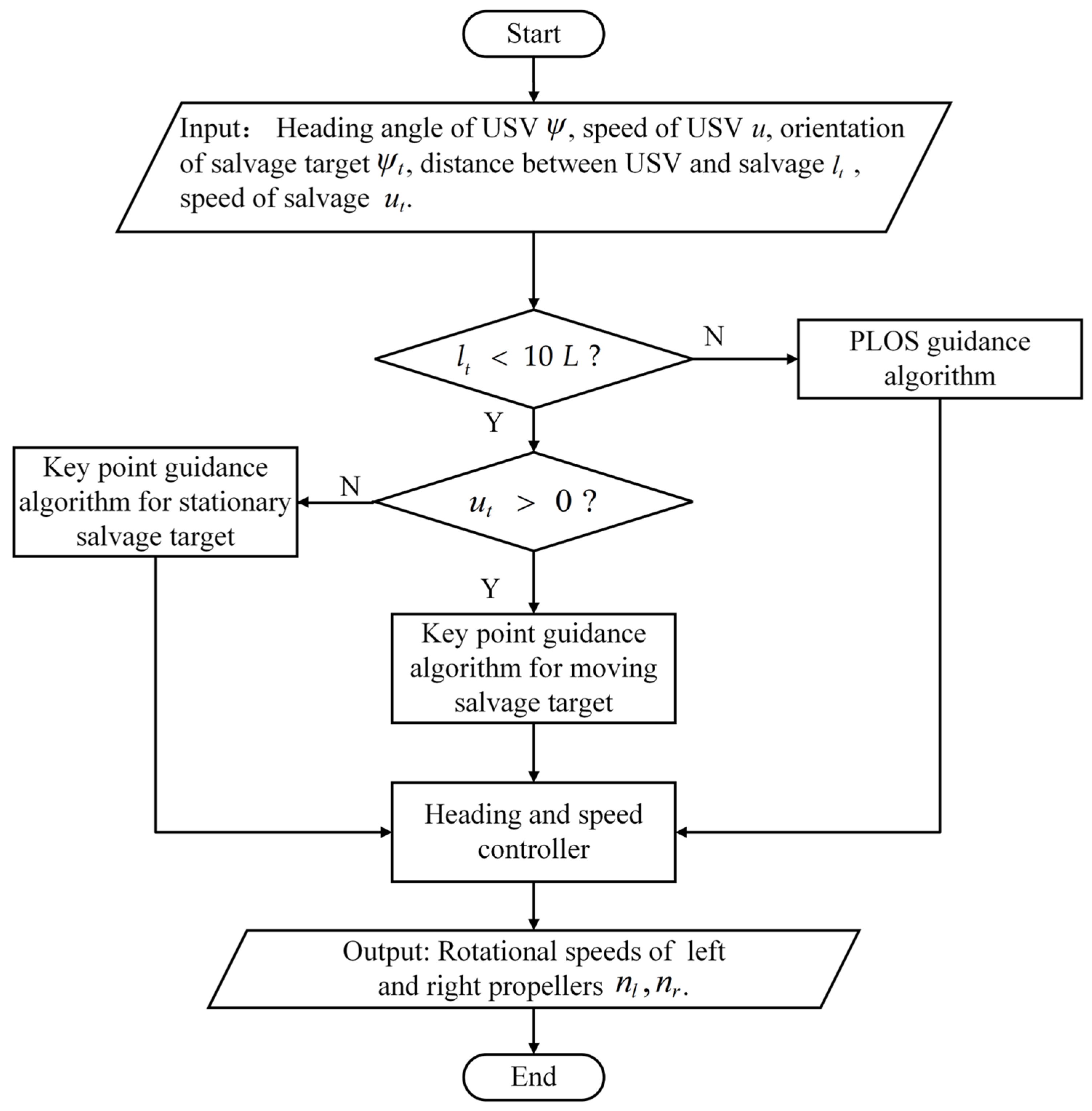
- A surface salvage target tracking algorithm is proposed. The algorithm is divided into two phases, based on the distance between the salvage target and the USV: rapid approach and terminal tracking. The output of the salvage target tracking algorithm consists of the desired heading and the desired speed.
- (2)
- In the rapid approach phase, the model predictive line-of-sight guidance algorithm and path-following control algorithm are introduced. The PLOS guidance algorithm comprehensively considers a segment of the path information to optimally determine the desired heading, thereby improving the accuracy of curved path following. In the terminal tracking phase, a key point guidance algorithm-based method is proposed to track stationary or moving salvage targets. This method ensures that the distance between the salvage target and the USV remains within the salvage radius.
- (3)
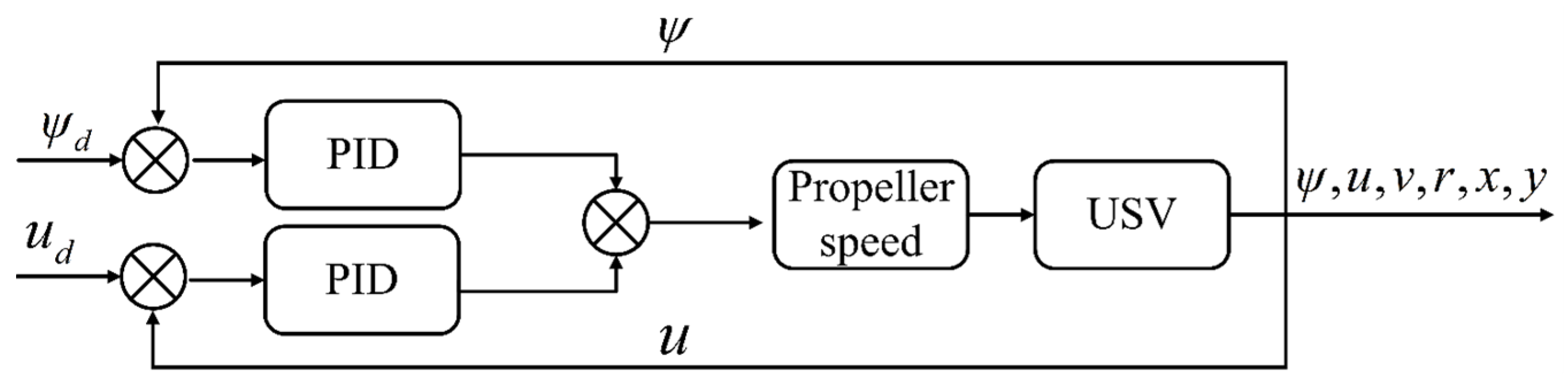
- A PID-based heading and speed controller is developed to track the desired heading and speed. By adjusting the rotational speeds of the left and right propellers, the USV is driven to accomplish the tracking of the surface salvage target.
2. Control Objective Description
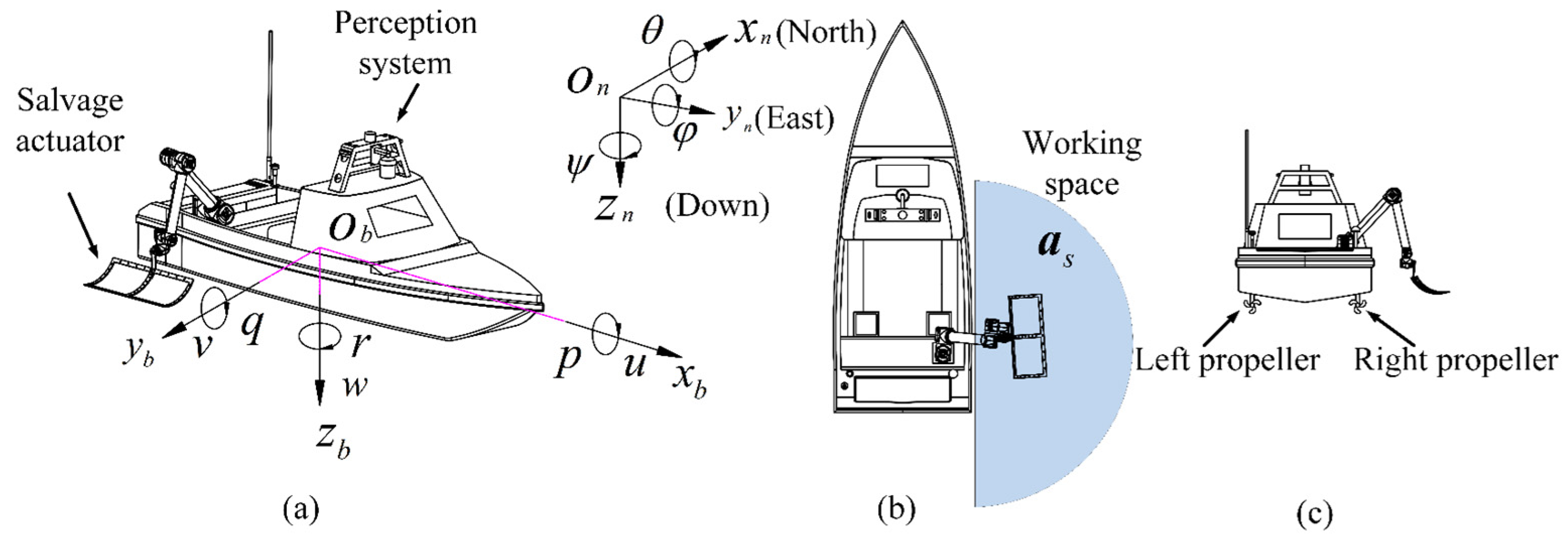
2.1. Configuration of Unmanned Surface Vehicle
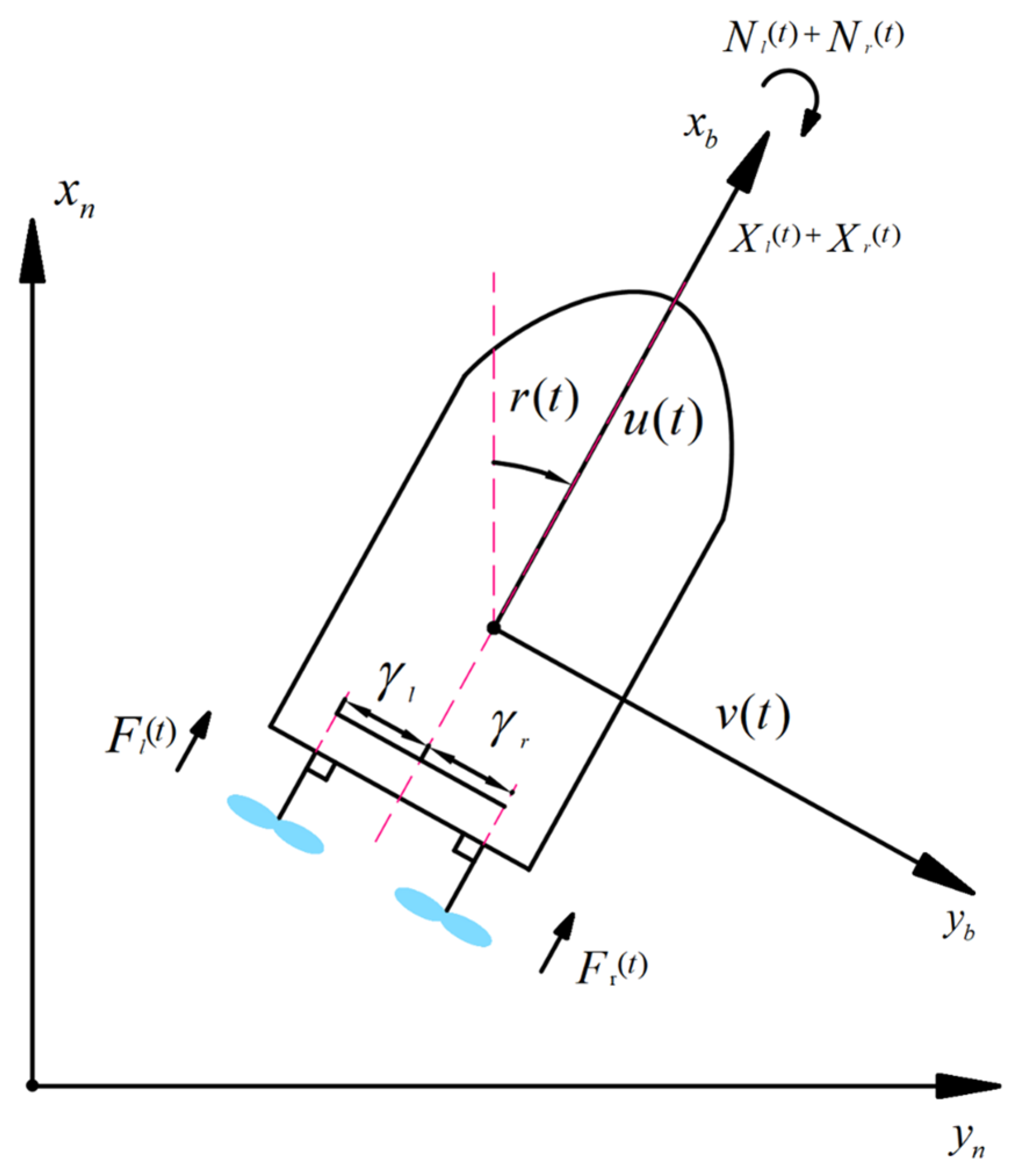
2.2. Mathematical Model of Twin-Propeller and Non-Rudder Unmanned Surface Vehicle
3. Structure of Salvage Target Tracking Algorithm
3.1. Rapid Approach Phase
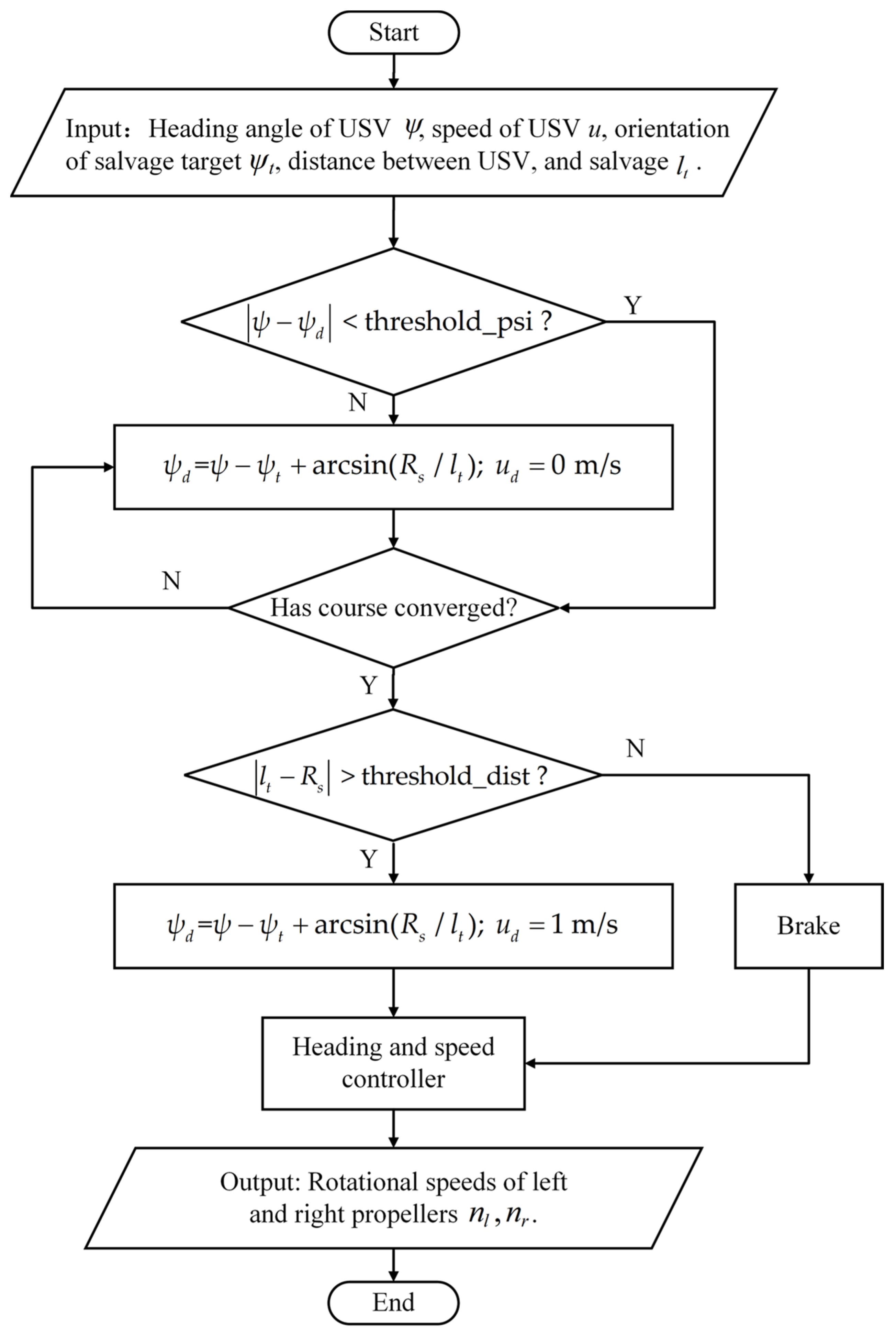
3.2. Terminal Tracking Phase
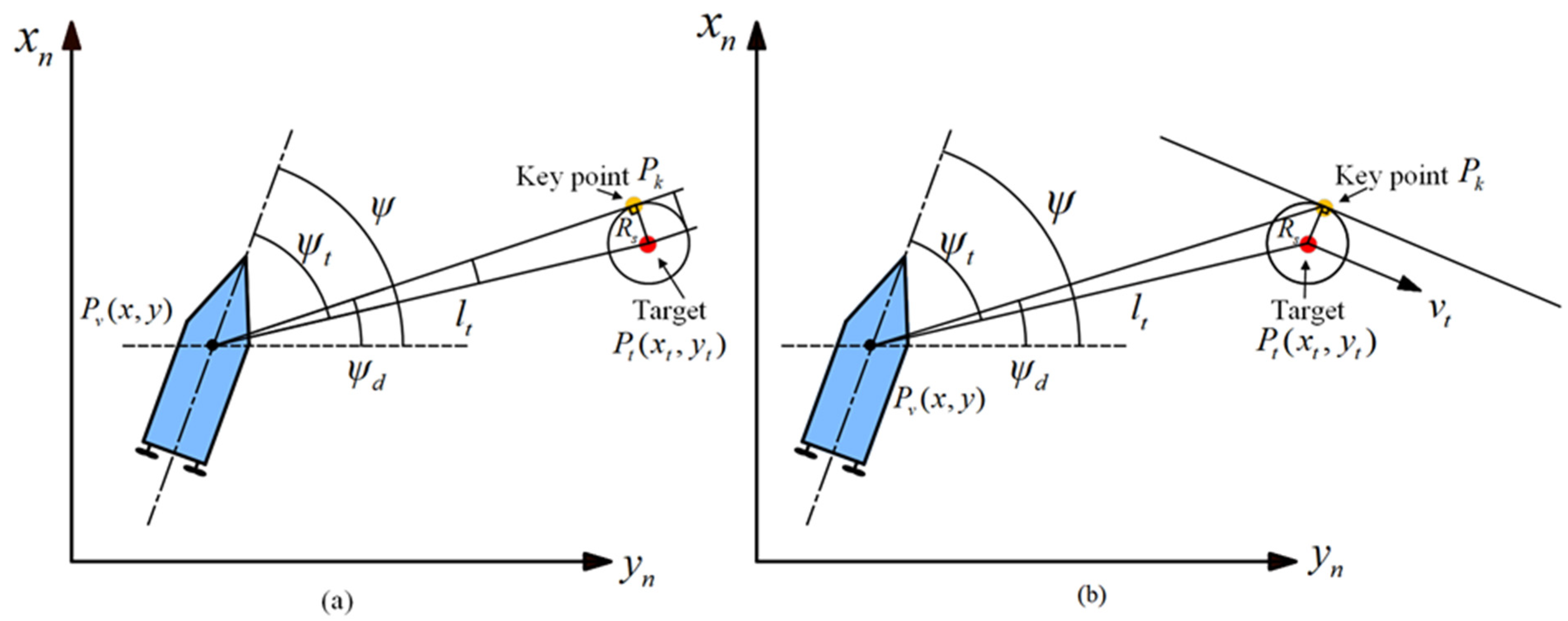
3.2.1. Key Point Guidance Algorithm for Stationary Salvage Target
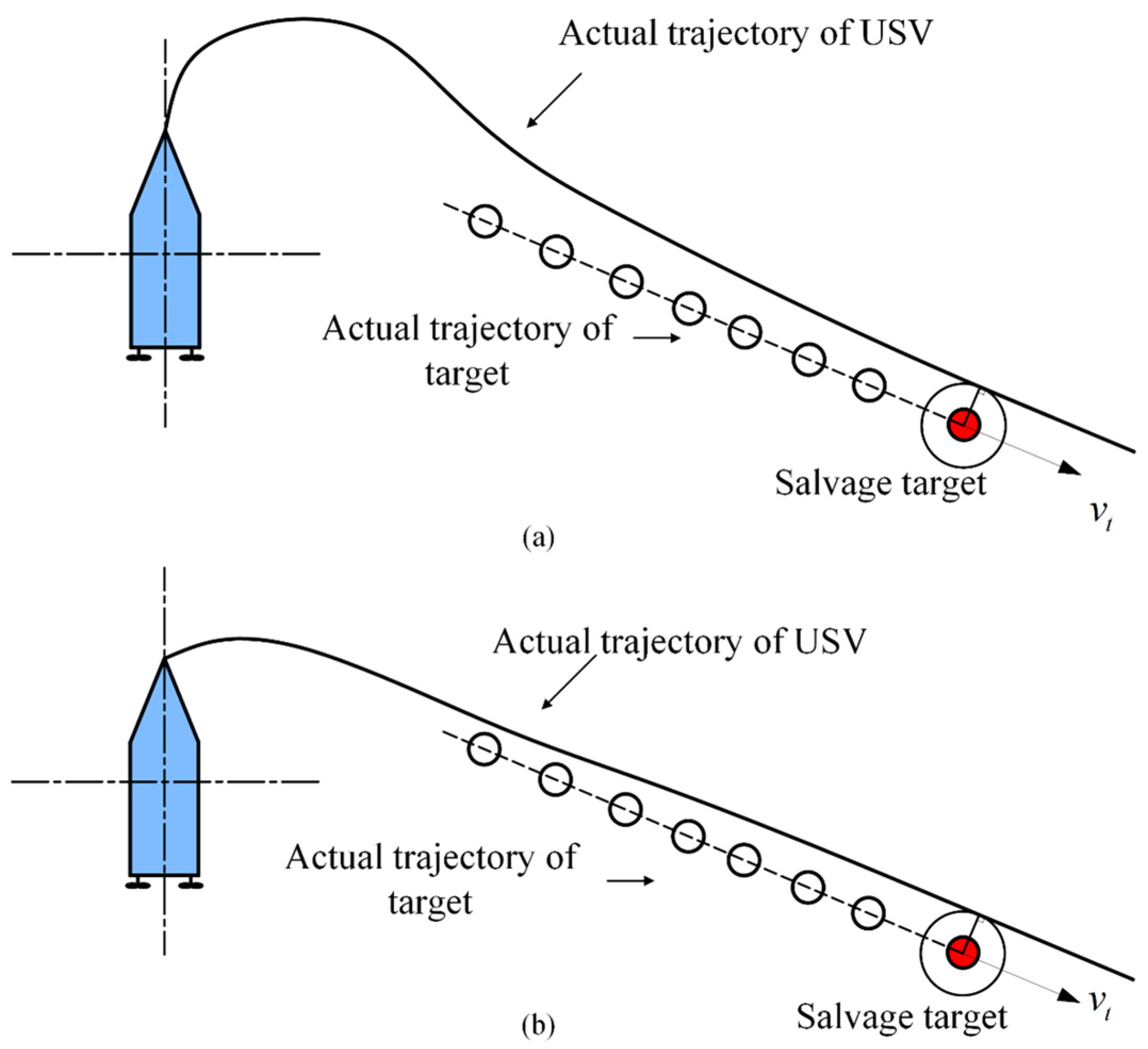
3.2.2. Key Point Guidance Algorithm for Moving Salvage Target
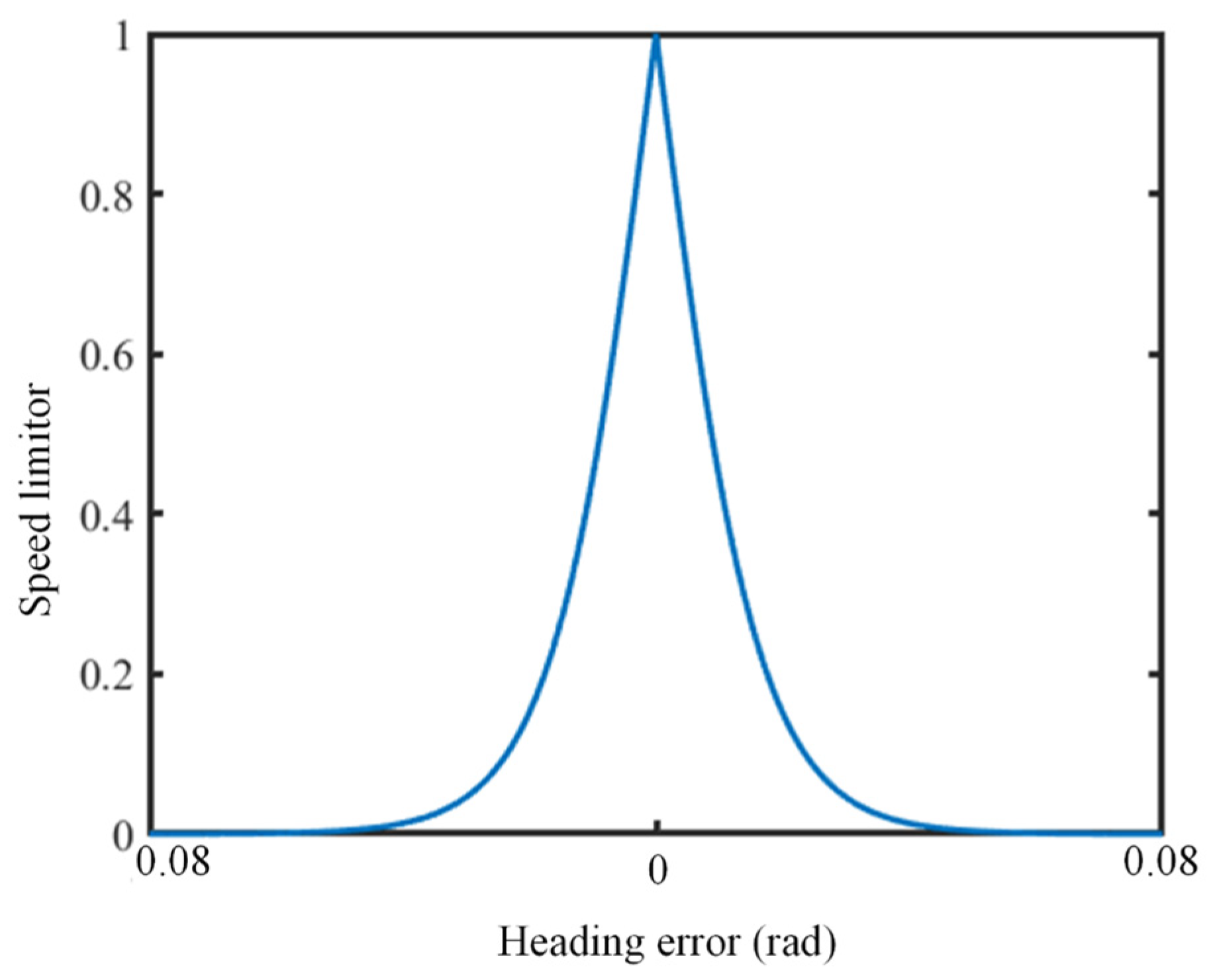
3.3. Heading and Speed Controller
3.3.1. Design of Heading and Speed Controller
3.3.2. Controller Parameter Tuning
3.4. Section Summary
4. Simulation Analysis
4.1. Setting of Numerical Analysis
4.2. Results of Numerical Analysis
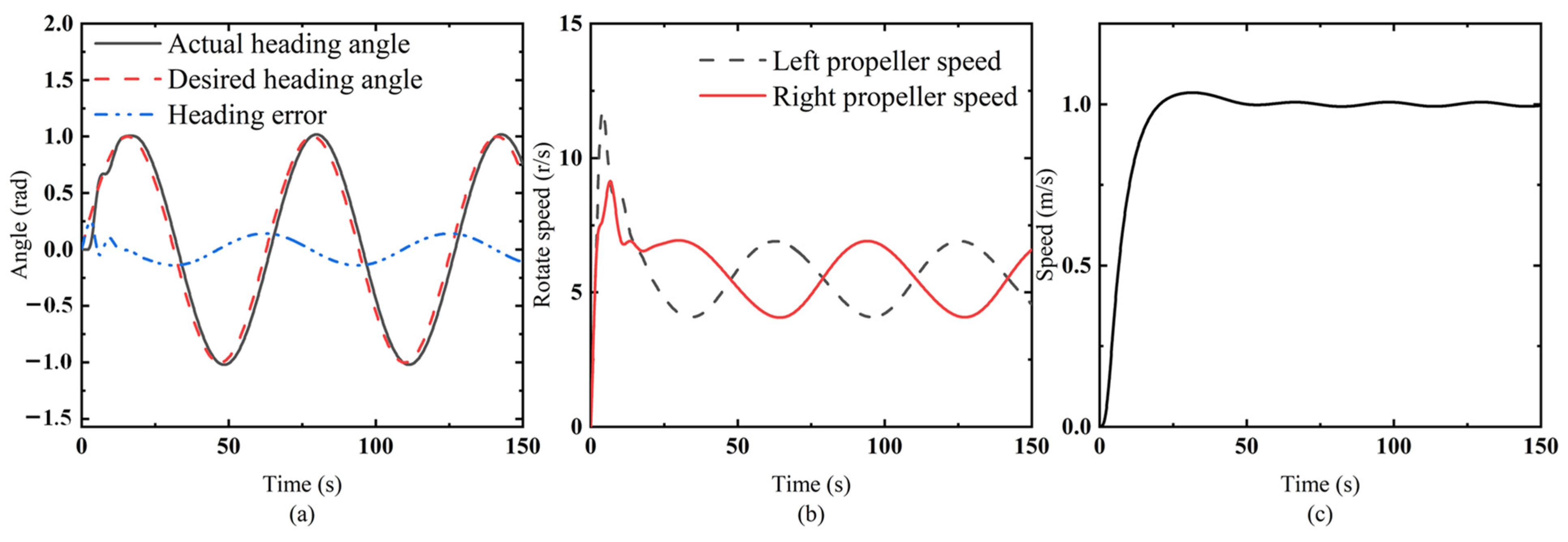
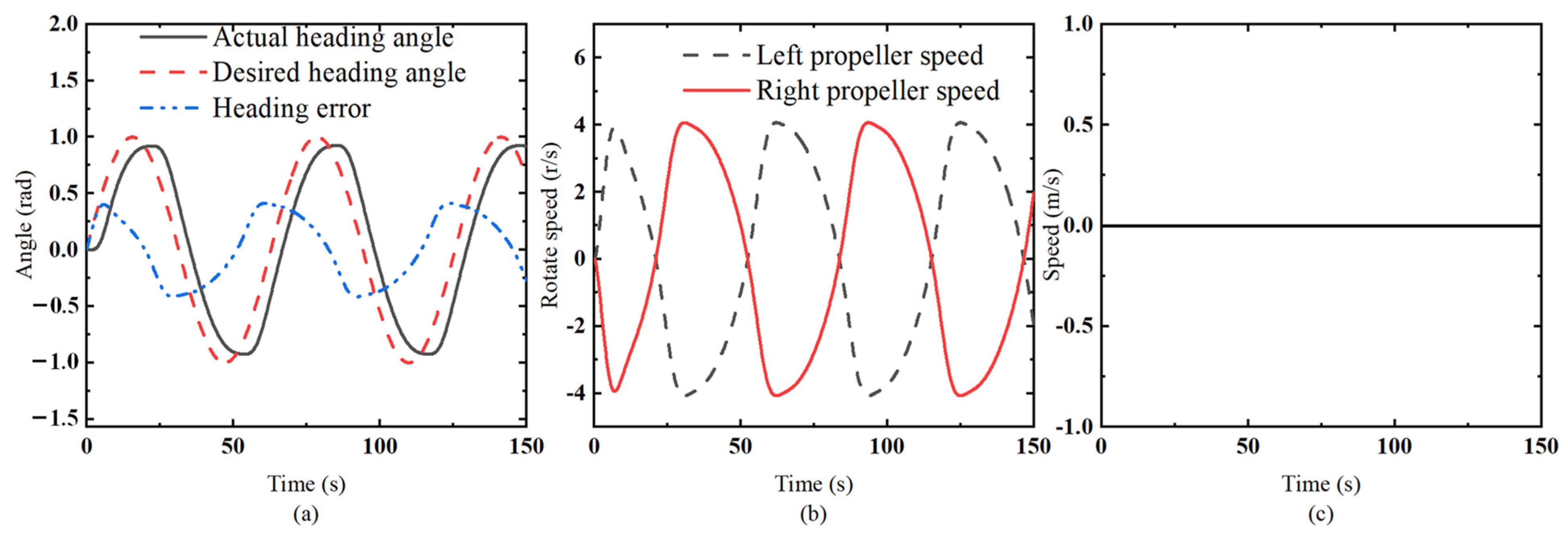
4.2.1. Heading and Speed Controller
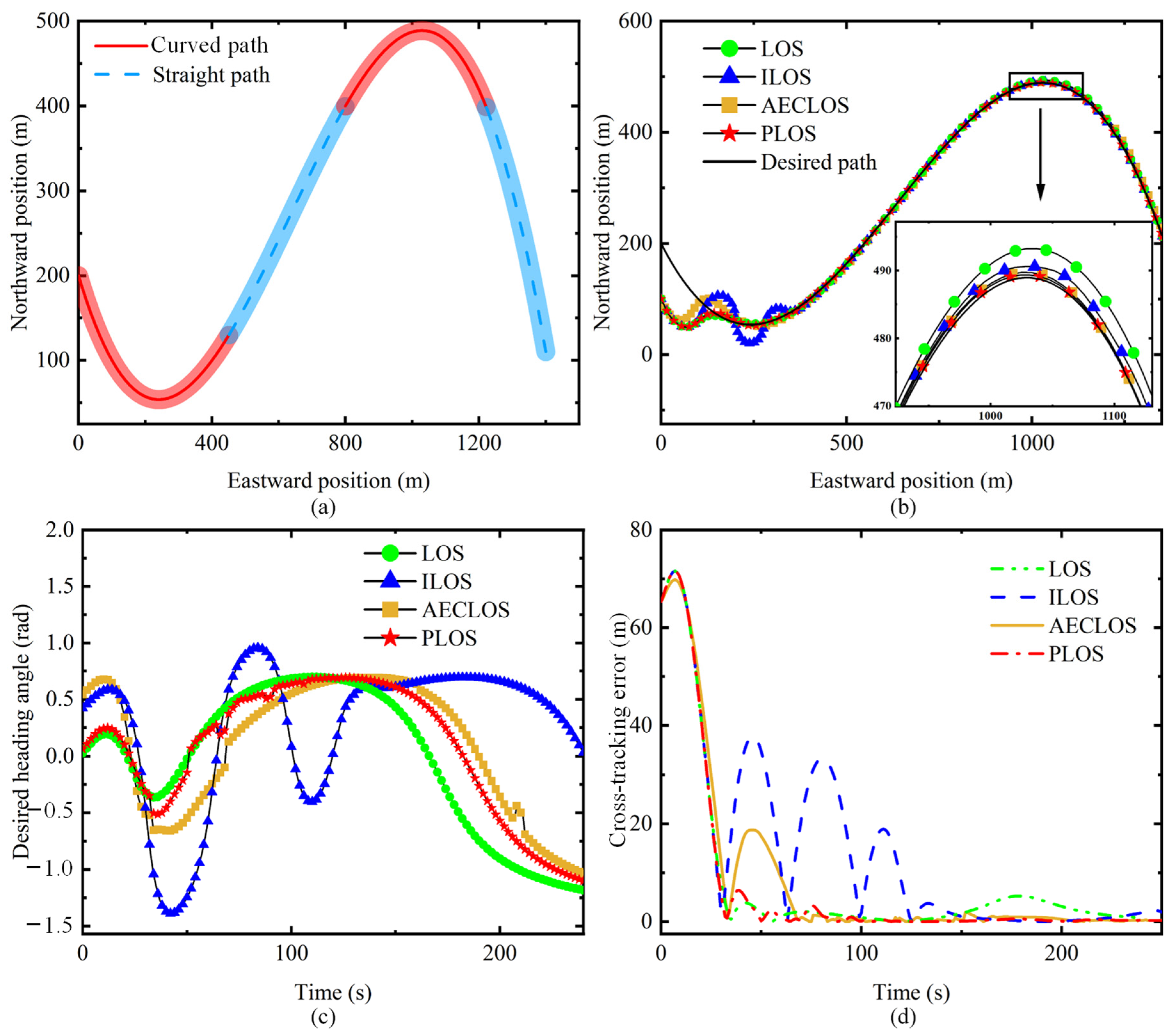
4.2.2. Rapid Approach Phase
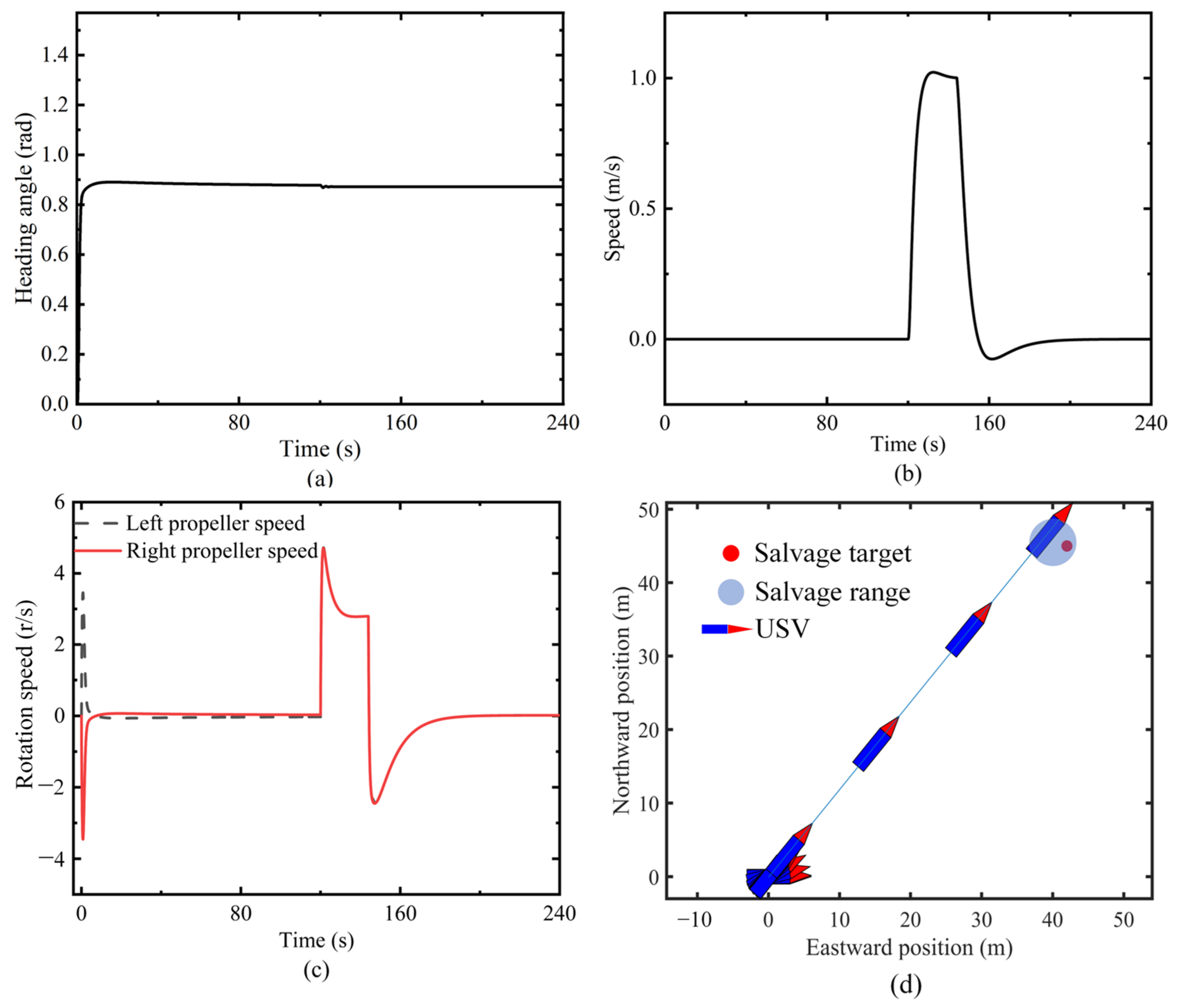
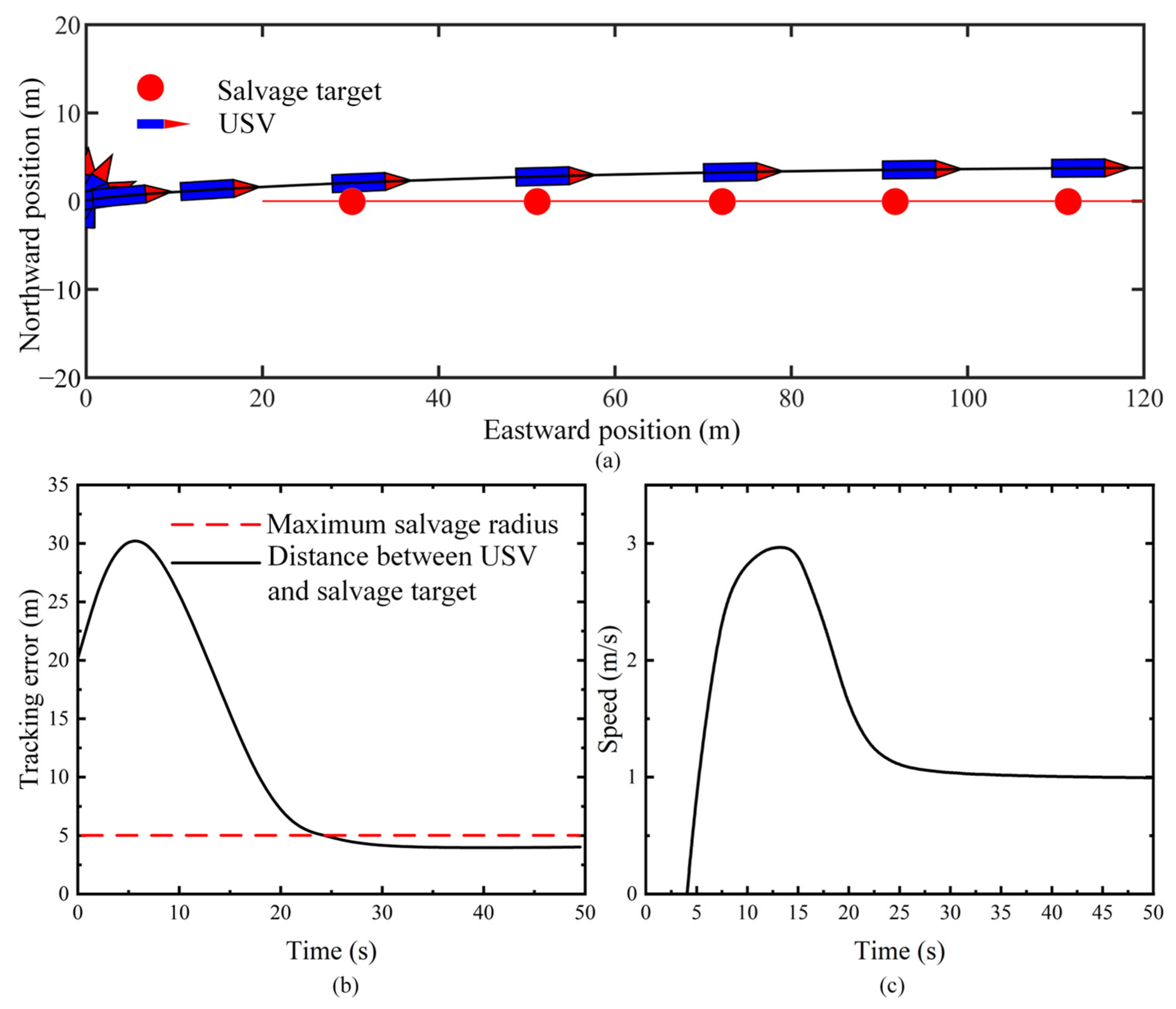
4.2.3. Terminal Tracking Phase
5. Experimental Verification
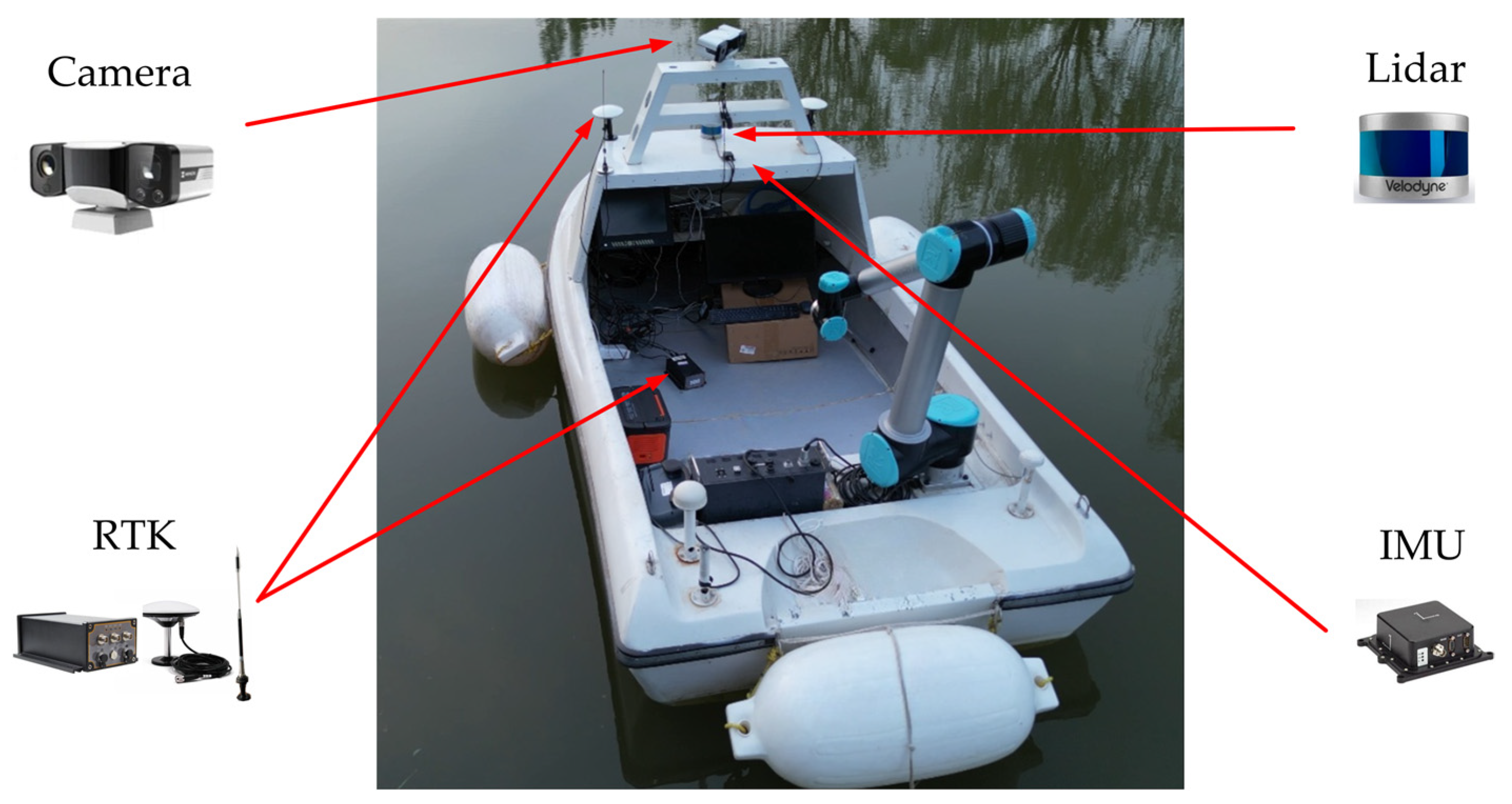
5.1. Experimental Platform
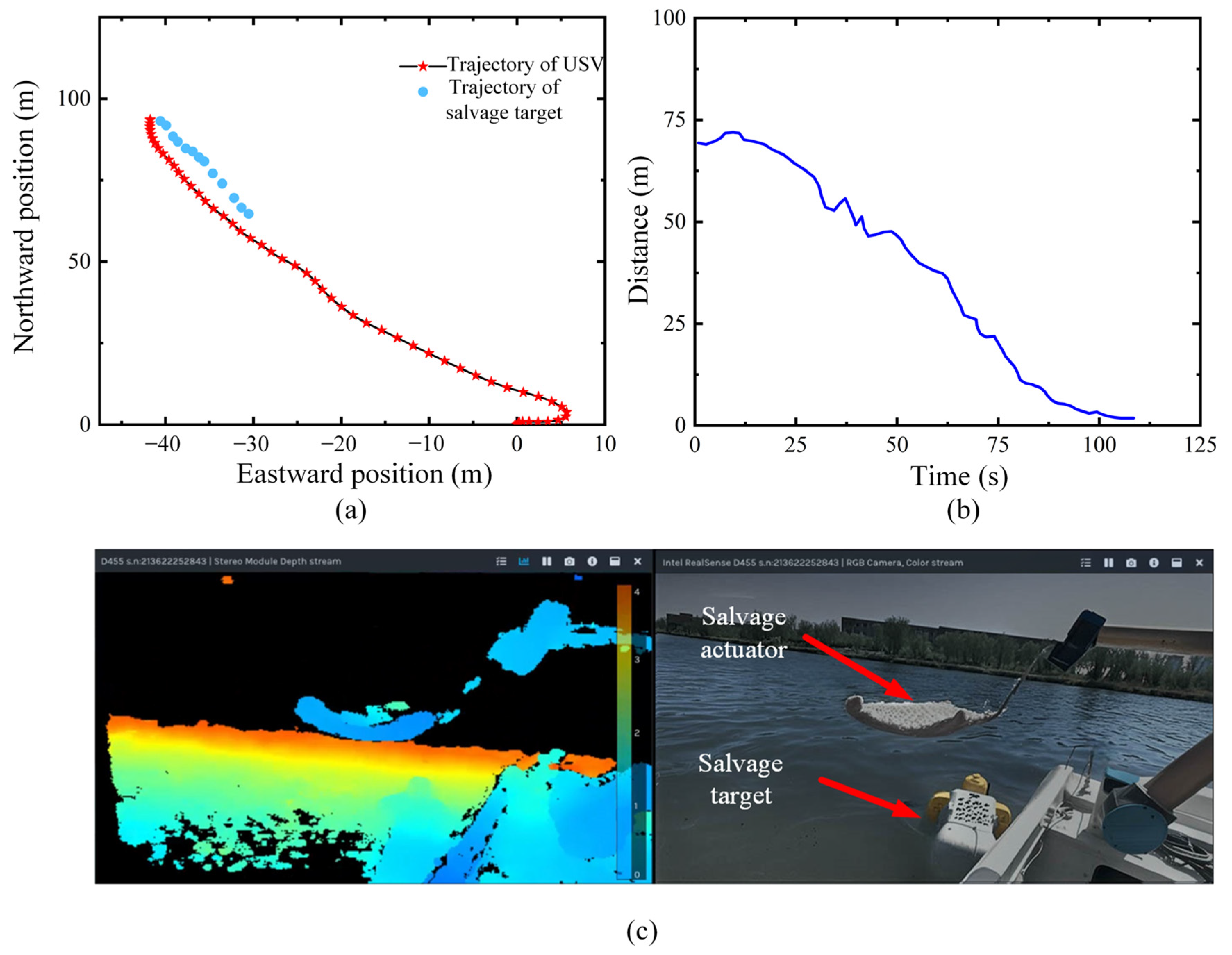
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kim, J. Target following and close monitoring using an unmanned surface vehicle. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 4233–4242. [Google Scholar] [CrossRef]
- Maternová, A.; Materna, M.; Dávid, A.; Török, A.; Švábová, L. Human error analysis and fatality prediction in maritime accidents. J. Mar. Sci. Eng. 2023, 11, 2287. [Google Scholar] [CrossRef]
- Xue, J.; Papadimitriou, E.; Reniers, G.; Wu, C.; Jiang, D.; van Gelder, P.H.A.J.M. A comprehensive statistical investigation framework for characteristics and causes analysis of ship accidents: A case study in the fluctuating backwater area of Three Gorges Reservoir region. Ocean Eng. 2021, 229, 108981. [Google Scholar] [CrossRef]
- Breivik, M.; Hovstein, V.E.; Fossen, T.I. Straight-line target tracking for unmanned surface vehicles. Model. Identif. Control A Nor. Res. Bull. 2008, 29, 131–149. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Han, Q. Adaptive fault-tolerant trajectory tracking control of twin-propeller non-rudder unmanned surface vehicles. Ocean Eng. 2023, 285, 115294. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons, Ltd.: Chichester, UK, 2011. [Google Scholar] [CrossRef]
- Do, K.D.; Jiang, Z.P.; Pan, J. Robust adaptive path following of underactuated ships. Automatica 2004, 40, 929–944. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, X. A novel DVS guidance principle and robust adaptive path-following control for underactuated ships using low frequency gain-learning. ISA Trans. 2015, 56, 75–85. [Google Scholar] [CrossRef]
- Samson, C. Control of chained systems application to path following and time-varying point-stabilization of mobile robots. IEEE Trans. Autom. Control 1995, 40, 64–77. [Google Scholar] [CrossRef]
- Skjetne, R.; Fossen, T.I. Nonlinear maneuvering and control of ships. In Proceedings of the MTS/IEEE Oceans 2001, Honolulu, HI, USA, 5–8 November 2001; pp. 1808–1815. [Google Scholar] [CrossRef]
- Wan, L.; Su, Y.; Zhang, H.; Shi, B.; AbouOmar, M.S. An improved integral light-of-sight guidance algorithm for path following of unmanned surface vehicles. Ocean Eng. 2020, 205, 107302. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control Syst. Technol. 2015, 23, 820–827. [Google Scholar] [CrossRef]
- Pettersen, K.Y.; Lefeber, E. Way point tracking control of ships. In Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, FL, USA, 4–7 December 2001; pp. 940–945. [Google Scholar] [CrossRef]
- Liu, C.; Negenborn, R.R.; Chu, X.; Zheng, H. Predictive path following based on adaptive line-of-sight for underactuated autonomous surface vessels. J. Mar. Sci. Technol. 2017, 23, 483–494. [Google Scholar] [CrossRef]
- Khaled, N.; Chalhoub, N.G. A self-tuning guidance and control system for marine surface vessels. Nonlinear Dyn. 2013, 73, 897–906. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Bai, Y.; Zhao, Y. Fuzzy-based optimal adaptive line-of-sight path following for underactuated unmanned surface vehicle with uncertainties and time-varying disturbances. Math. Probl. Eng. 2018, 2018, 7512606. [Google Scholar] [CrossRef]
- Liu, C.; Chen, C.L.P.; Zou, Z.; Li, T. Adaptive NN-DSC control design for path following of underactuated surface vessels with input saturation. Neurocomputing 2017, 267, 466–474. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. ESO-based line-of-sight guidance algorithm for path following of underactuated marine surface vehicles with exact sideslip compensation. IEEE J. Ocean. Eng. 2017, 42, 477–487. [Google Scholar] [CrossRef]
- Qi, J.; Wang, B.; Fei, Q. Curve path following based on improved line-of-sight algorithm for USV. In Proceedings of the 2022 China Automation Congress, Xiamen, China, 25–27 November 2022; pp. 3801–3806. [Google Scholar] [CrossRef]
- Maki, T.; Mizushima, H.; Kondo, H.; Ura, T.; Sakamaki, T.; Yanggisawa, M.; Yanagisawa, M. Real time path-planning of an AUV based on characteristics of passive acoustic landmarks for visual mapping of shallow vent fields. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September 2007–4 October 2007. [Google Scholar] [CrossRef]
- Hernández, J.D.; Moll, M.; Vidal, E.; Carreras, M.; Kavraki, L. Planning feasible and safe paths online for autonomous underwater vehicles in unknown environments. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Republic of Korea, 9–14 October 2016. [Google Scholar] [CrossRef]
- Svec, P.; Shah, B.C.; Bertaska, I.R.; Alvarez, J.; Sinisterra, A.J.; Ellenrieder, K.V. Dynamics-aware target following for an autonomous surface vehicle operating under COLREGs in civilian traffic. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3871–3878. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, Y.; Zhang, Y.; Nie, Y.; Tang, J.; Zhu, S. A hybrid path planning algorithm for unmanned surface vehicles in complex environment with dynamic obstacles. IEEE Access 2019, 7, 126439–126449. [Google Scholar] [CrossRef]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D.; Khan, A. Feasibility study of a constrained Dijkstra approach for optimal path planning of an unmanned surface vehicle in a dynamic maritime environment. In Proceedings of the 2018 IEEE International Conference on Autonomous Robot Systems and Competitions, Torres Vedras, Portugal, 25–27 April 2018; pp. 117–122. [Google Scholar] [CrossRef]
- Wang, D.; Wang, P.; Zhang, X.; Guo, X.; Shu, Y.; Tian, X. An obstacle avoidance strategy for the wave glider based on the improved artificial potential field and collision prediction model. Ocean Eng. 2020, 206, 107356. [Google Scholar] [CrossRef]
- Du, B.; Xie, W.; Zhang, W.; Chen, H. A target tracking guidance for unmanned surface vehicles in the presence of obstacles. IEEE Trans. Intell. Transp. Syst. 2024, 25, 4102–4115. [Google Scholar] [CrossRef]
- Zhang, M.; Zheng, X.; Wang, J.; Pan, Z.; Che, W.; Wang, H. Trajectory planning for cooperative double unmanned surface vehicles connected with a floating rope for floating garbage cleaning. J. Mar. Sci. Eng. 2024, 12, 739. [Google Scholar] [CrossRef]
- Sun, P.; Zhu, B.; Zuo, Z.; Basin, M.V. Vision-based finite-time uncooperative target tracking for UAV subject to actuator saturation. Automatica 2021, 130, 109708. [Google Scholar] [CrossRef]
- Aumtab, C.; Wanichanon, T. Stability and tracking control of nonlinear rigid-body ship motions. J. Mar. Sci. Eng. 2022, 10, 153. [Google Scholar] [CrossRef]
- Liu, H.; Lin, J.; Yu, G.; Yuan, J.; Precup, R.E. Robust adaptive self-structuring neural network bounded target tracking control of underactuated surface vessels. Comput. Intell. Neurosci. 2021, 2021, 2010493. [Google Scholar] [CrossRef] [PubMed]
- Shojaei, K. Three-dimensional neural network tracking control of a moving target by underactuated autonomous underwater vehicles. Neural Comput. Appl. 2017, 31, 509–521. [Google Scholar] [CrossRef]
- Kim, J. Optimal motion controllers for an unmanned surface vehicle to track a maneuvering underwater target based on coarse range-bearing measurements. Ocean Eng. 2020, 216, 107973. [Google Scholar] [CrossRef]
- ISO 11592-1:2016; Small Craft—Determination of Maximum Propulsion Power Rating Using Planing Test Method—Part 1: Craft Designed for A Maximum Engine Power Level of 110 kW and Above. British Standards Institution. International Organization for Standardization: Geneva, Switzerland, 2016.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase of Algorithm | Parameter Name | Parameter Setting |
|---|---|---|
| Rapid approach phase | Look-ahead distance, | 13.00 m |
| Sampling period of discrete system, | 0.10 s | |
| Maximum speed of USV, | 5.00 m/s | |
| Terminal tracking phase | Radius of auxiliary circle, | 5.00 m |
| Allowable error of heading controller, threshold_psi | 0.05 rad | |
| Heading and speed controller | Speed proportional parameter, | 9.00 |
| Speed integral parameter, | 0.08 | |
| Speed differential parameter, | 0.70 | |
| Heading proportional parameter, | 5.00 | |
| Heading integral parameter, | 0.01 | |
| Heading differential parameter, | 1.00 |
| Parameter Name | Value |
|---|---|
| Length of USV, | 6.00 m |
| Distance between left and right propellers, | 1.00 m |
| Width of USV, b | 1.50 m |
| Propulsion deduction coefficient, | 0.40 |
| Maximum rotational speed of left and right propellers, | 15.00 r/s |
| Maximum angular acceleration of left and right propellers, | 5.00 r/s2 |
| Diameter of left and right propellers, | 0.10 m |
| Advance coefficient of left and right propellers, | 0.32 |
| Coefficient of left and right propellers influencing on turning moment, | 0.30 |
| Algorithm | Average (m) | Standard Deviation (m) | Root Mean Square Error (m) |
|---|---|---|---|
| LOS | 8.144 | 21.844 | 22.114 |
| ILOS | 10.858 | 18.462 | 18.747 |
| AECLOS | 8.012 | 16.705 | 16.094 |
| PLOS | 6.602 | 17.703 | 13.212 |
| Algorithm | Average (m) | Standard Deviation (m) | Root Mean Square Error (m) |
|---|---|---|---|
| LOS | 1.837 | 1.701 | 3.092 |
| ILOS | 0.972 | 1.020 | 2.154 |
| AECLOS | 0.519 | 0.730 | 1.782 |
| PLOS | 0.218 | 0.190 | 1.504 |
| Parameter | Value |
|---|---|
| Length × width × height | 4.80 m × 1.60 m × 0.90 m |
| Weight | 550.00 kg |
| Load | 500.00 kg |
| Draft depth | 0.22 m |
| Distance between left and right propellers | 1.30 m |
| Diameter of propellers | 0.15 m |
| Advance coefficient of propellers | 0.13 |
| Maximum rotational speed of propellers under no-load condition | 13.33 r/s |
| Coefficient of propellers influencing on turning moment | 0.29 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Liu, C.; Wen, M.; Wang, Y.; Wang, J.; Zheng, R. A Salvage Target Tracking Algorithm for Unmanned Surface Vehicles Combining Improved Line-of-Sight and Key Point Guidance. J. Mar. Sci. Eng. 2025, 13, 1158. https://doi.org/10.3390/jmse13061158
Liu J, Liu C, Wen M, Wang Y, Wang J, Zheng R. A Salvage Target Tracking Algorithm for Unmanned Surface Vehicles Combining Improved Line-of-Sight and Key Point Guidance. Journal of Marine Science and Engineering. 2025; 13(6):1158. https://doi.org/10.3390/jmse13061158
Chicago/Turabian StyleLiu, Jiahe, Chao Liu, Mingmei Wen, Yang Wang, Jinzhe Wang, and Rencheng Zheng. 2025. "A Salvage Target Tracking Algorithm for Unmanned Surface Vehicles Combining Improved Line-of-Sight and Key Point Guidance" Journal of Marine Science and Engineering 13, no. 6: 1158. https://doi.org/10.3390/jmse13061158
APA StyleLiu, J., Liu, C., Wen, M., Wang, Y., Wang, J., & Zheng, R. (2025). A Salvage Target Tracking Algorithm for Unmanned Surface Vehicles Combining Improved Line-of-Sight and Key Point Guidance. Journal of Marine Science and Engineering, 13(6), 1158. https://doi.org/10.3390/jmse13061158