
Design and Performance Study of a Six-Bar Mechanism Underwater Robot Based on Cownose Ray Bionics

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Mechanism Design and Analysis
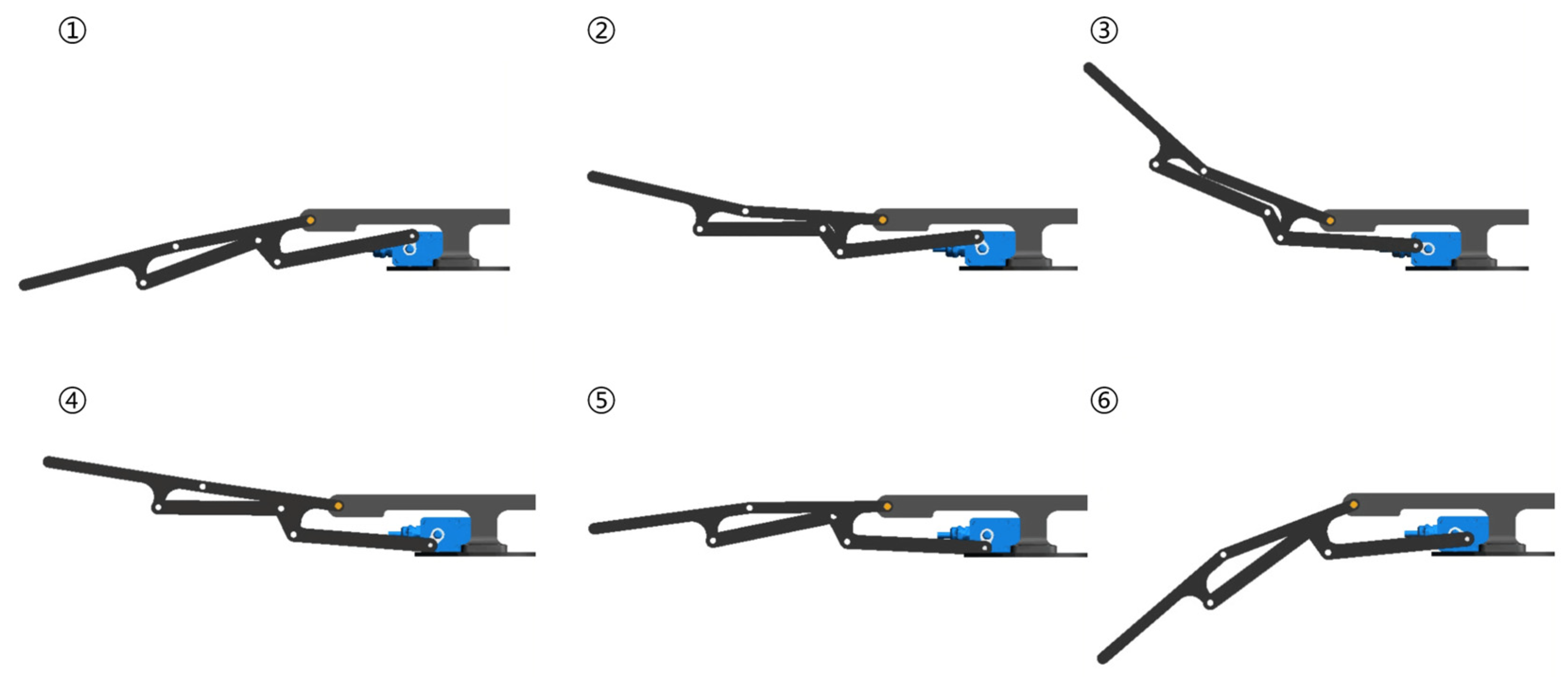
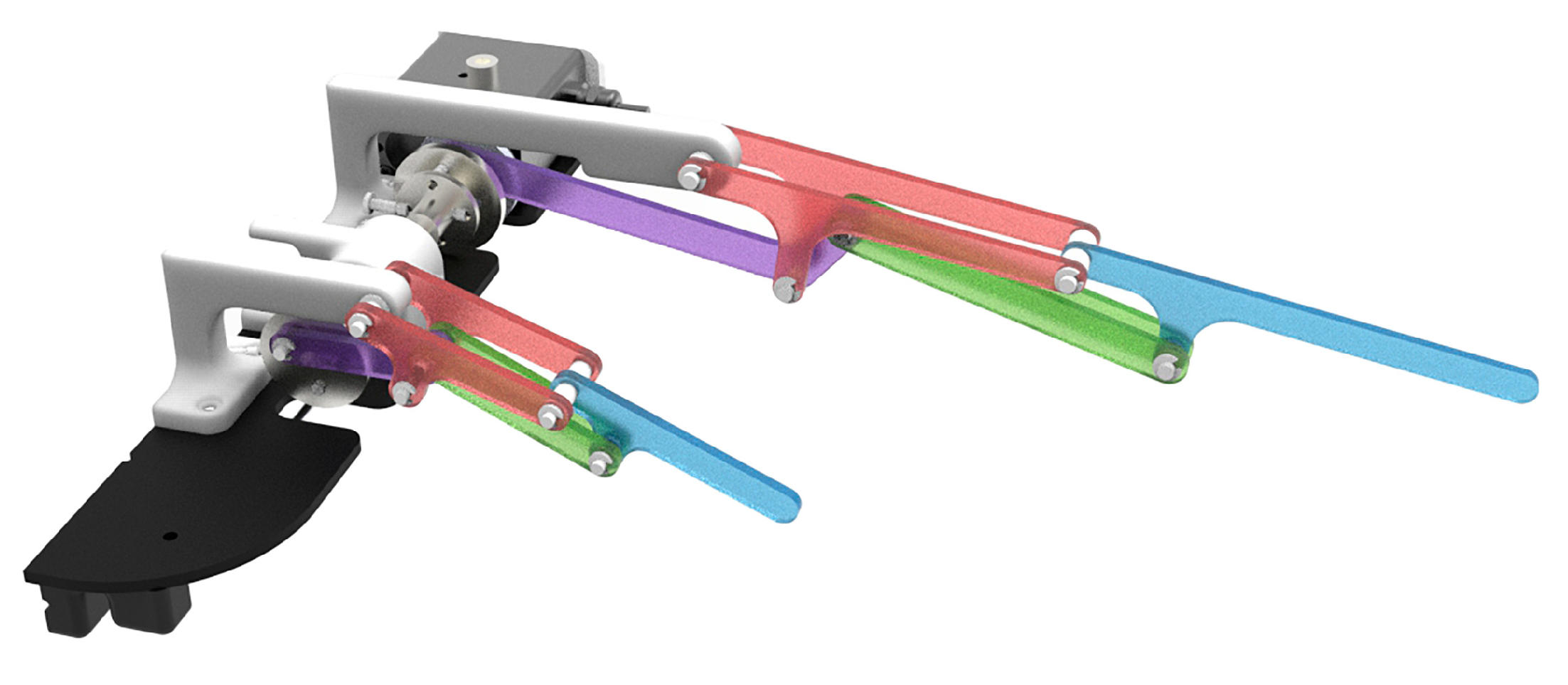
2.1. Bionic Pectoral Fin Mechanism
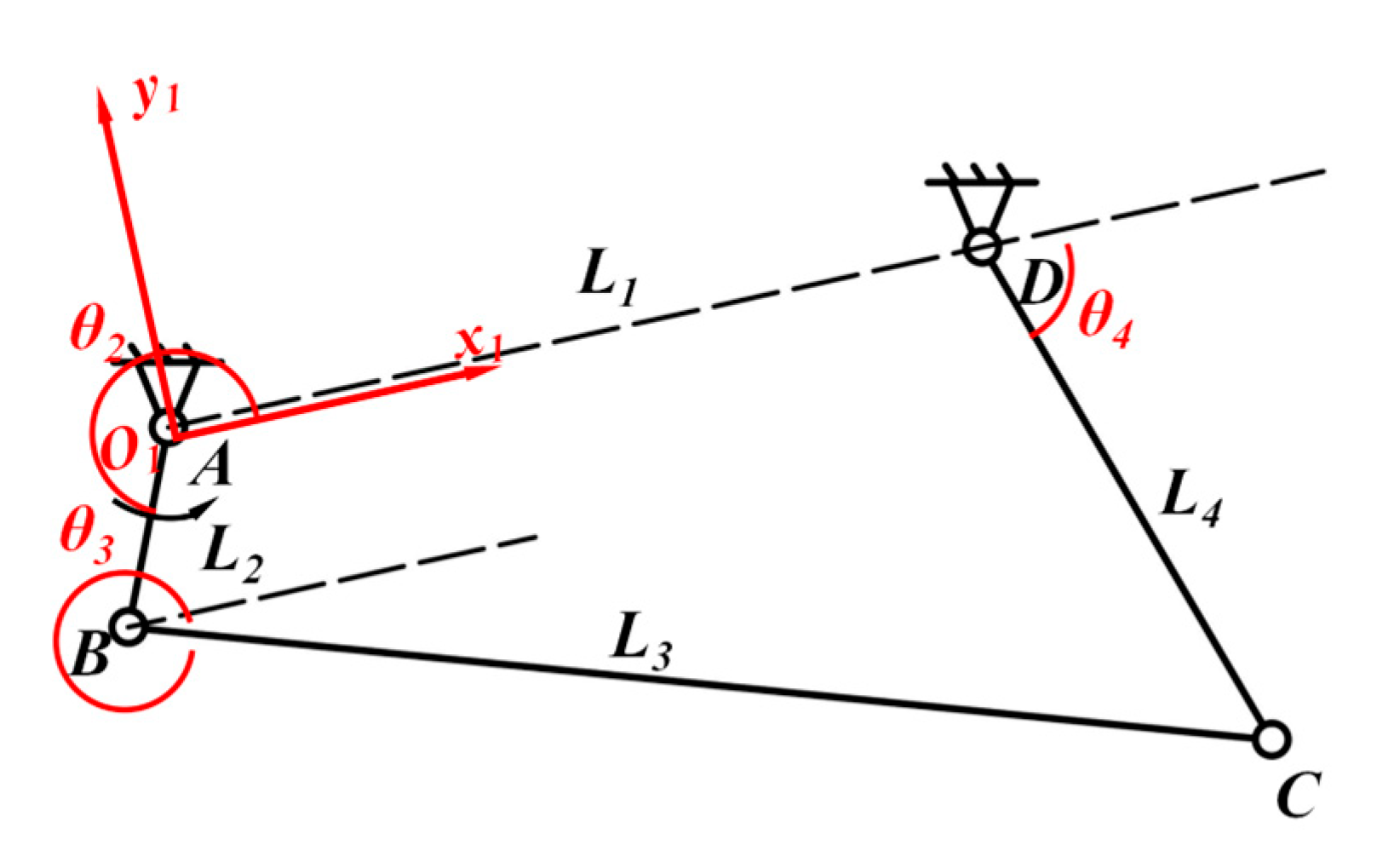
2.2. Bionic Pectoral Fin Mechanism Calculations
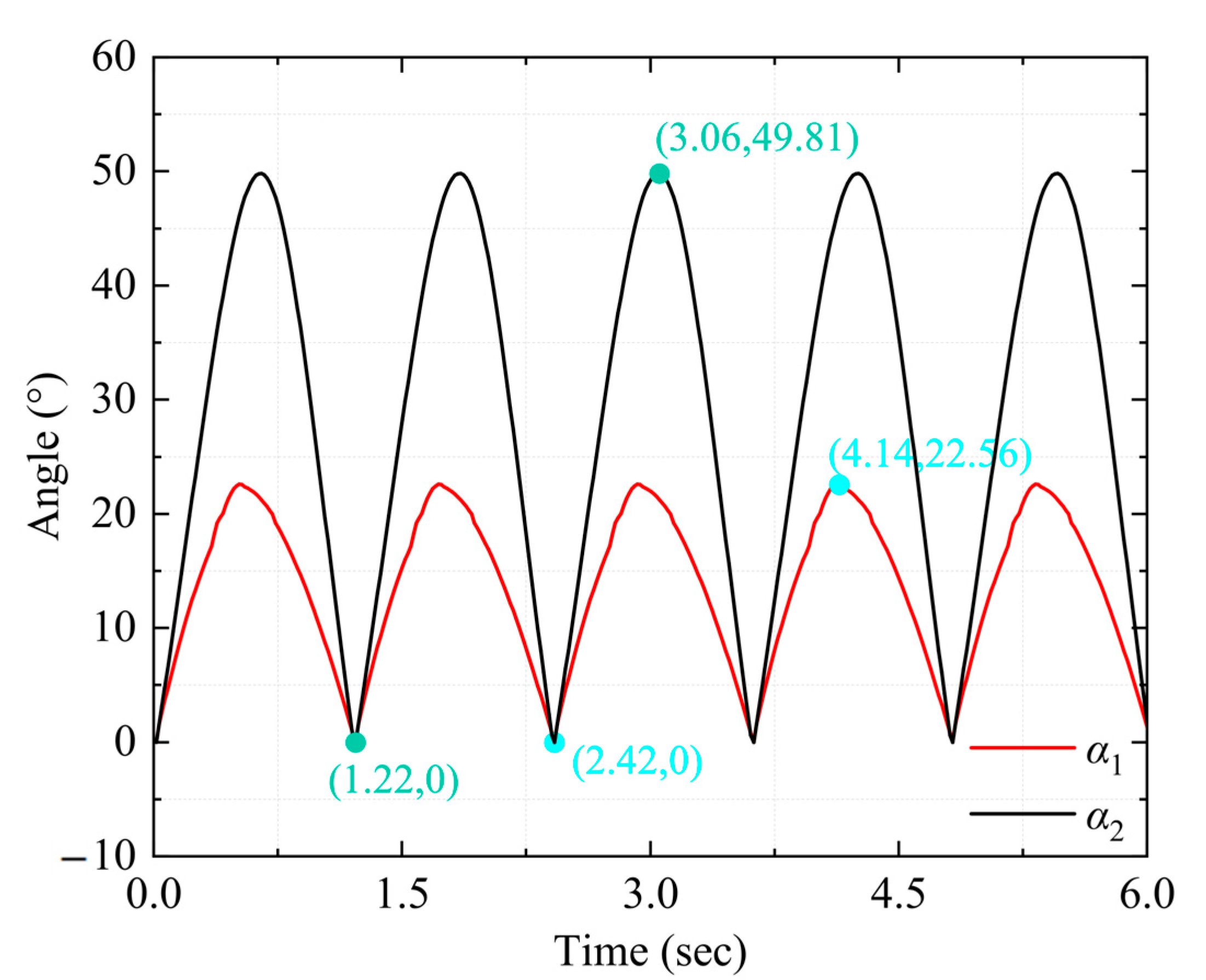
2.3. Bionic Pectoral Fin Mechanism Simulation
3. Prototyping and Experimentation
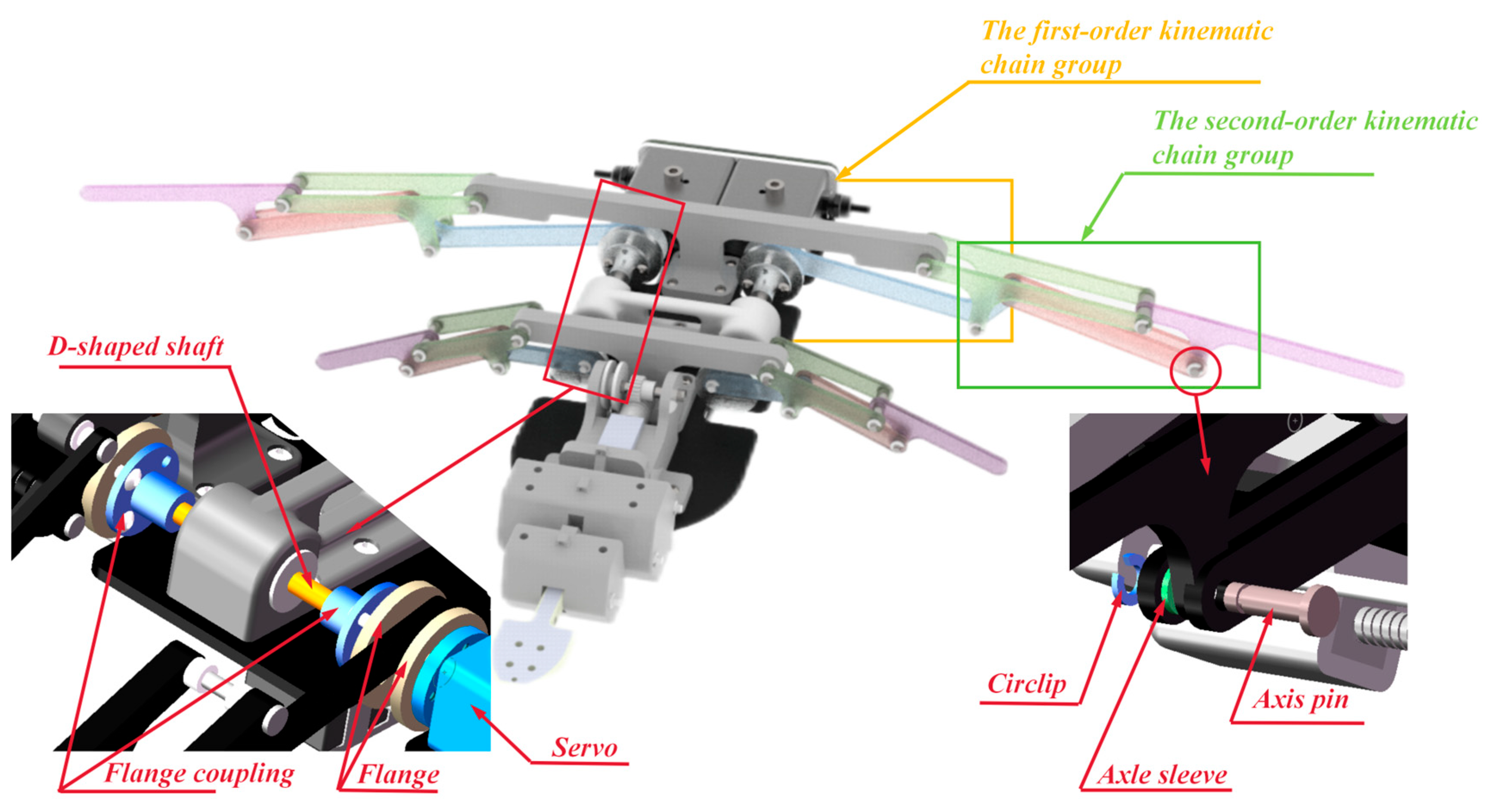
3.1. Prototype Design
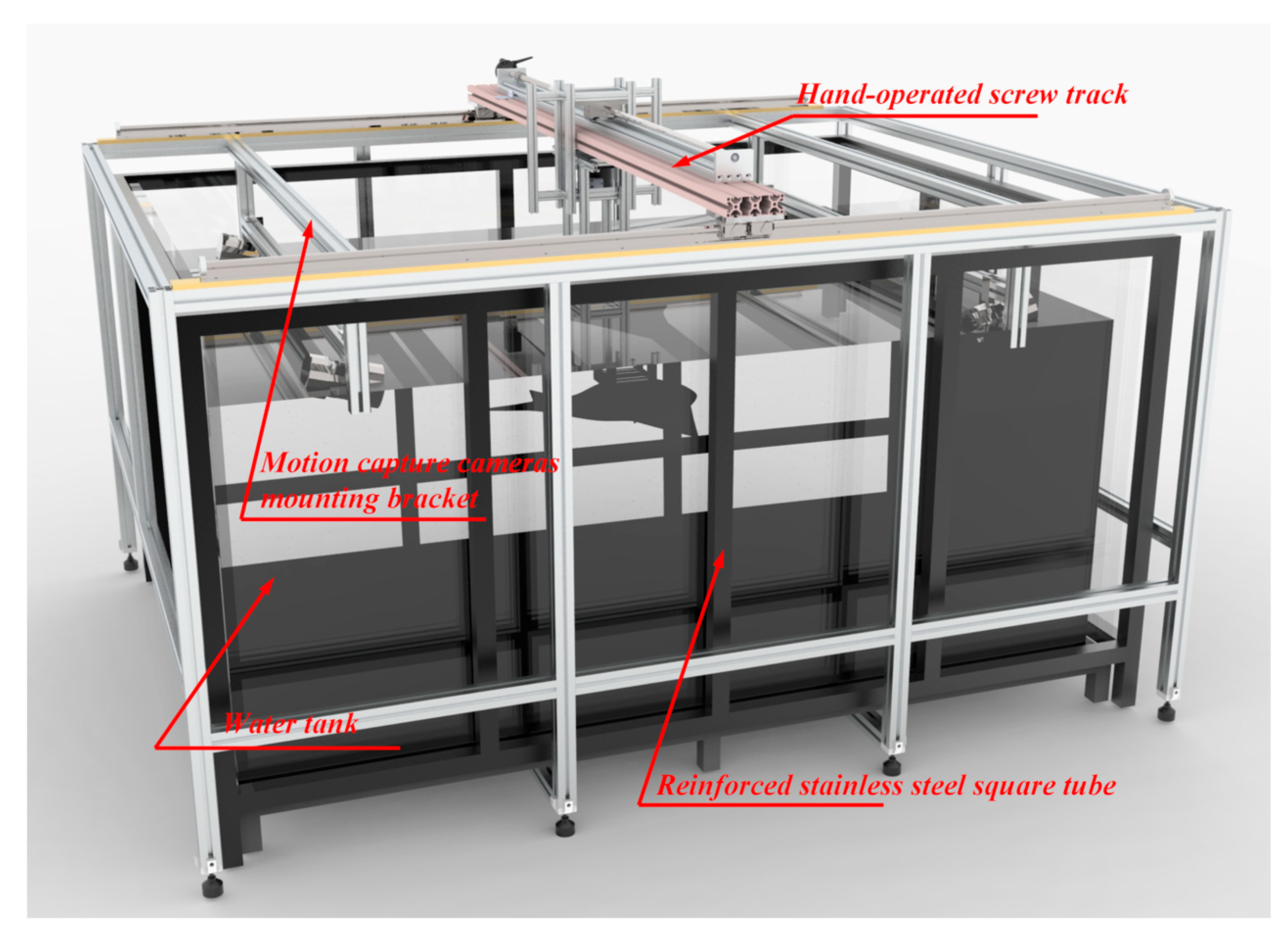
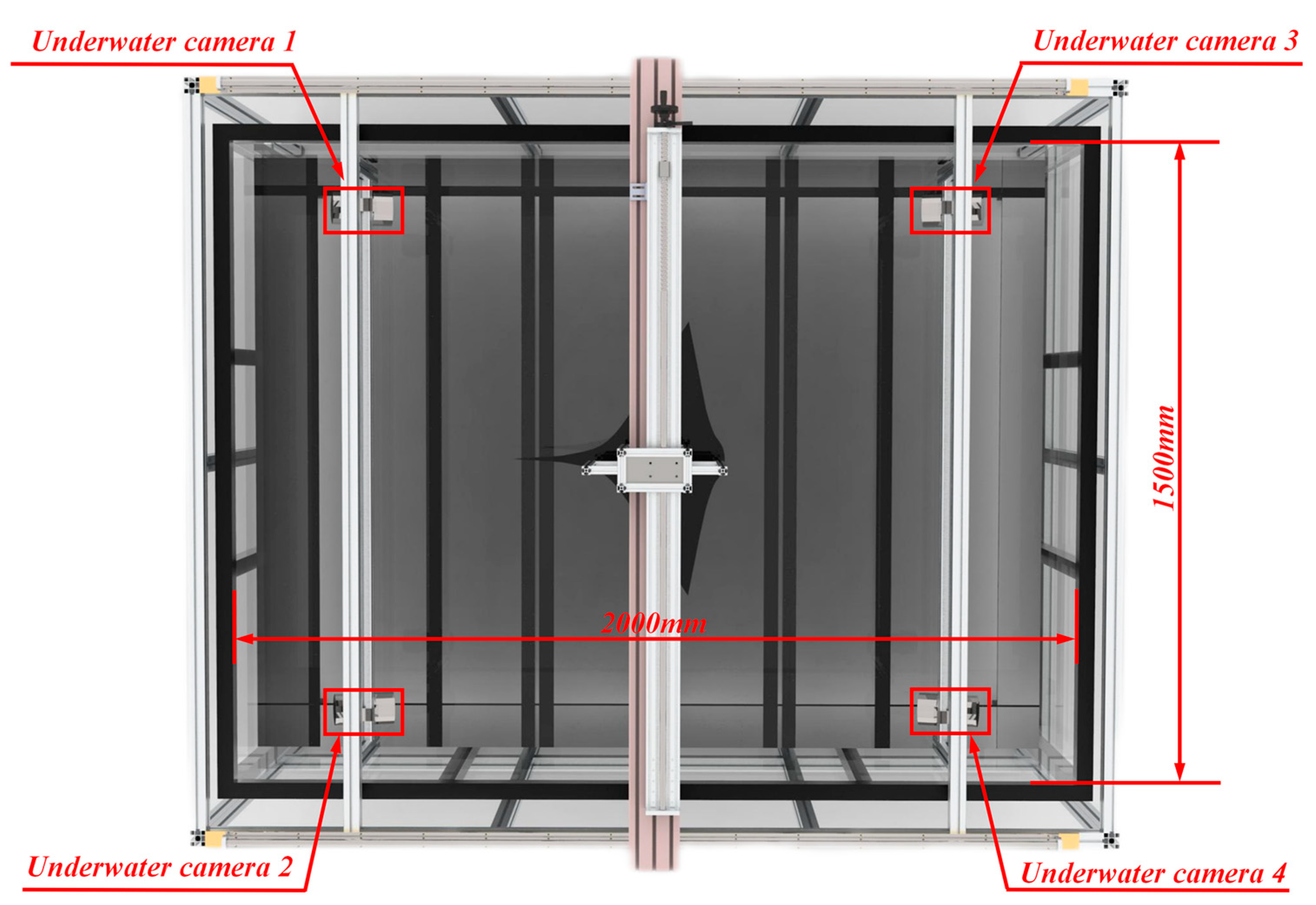
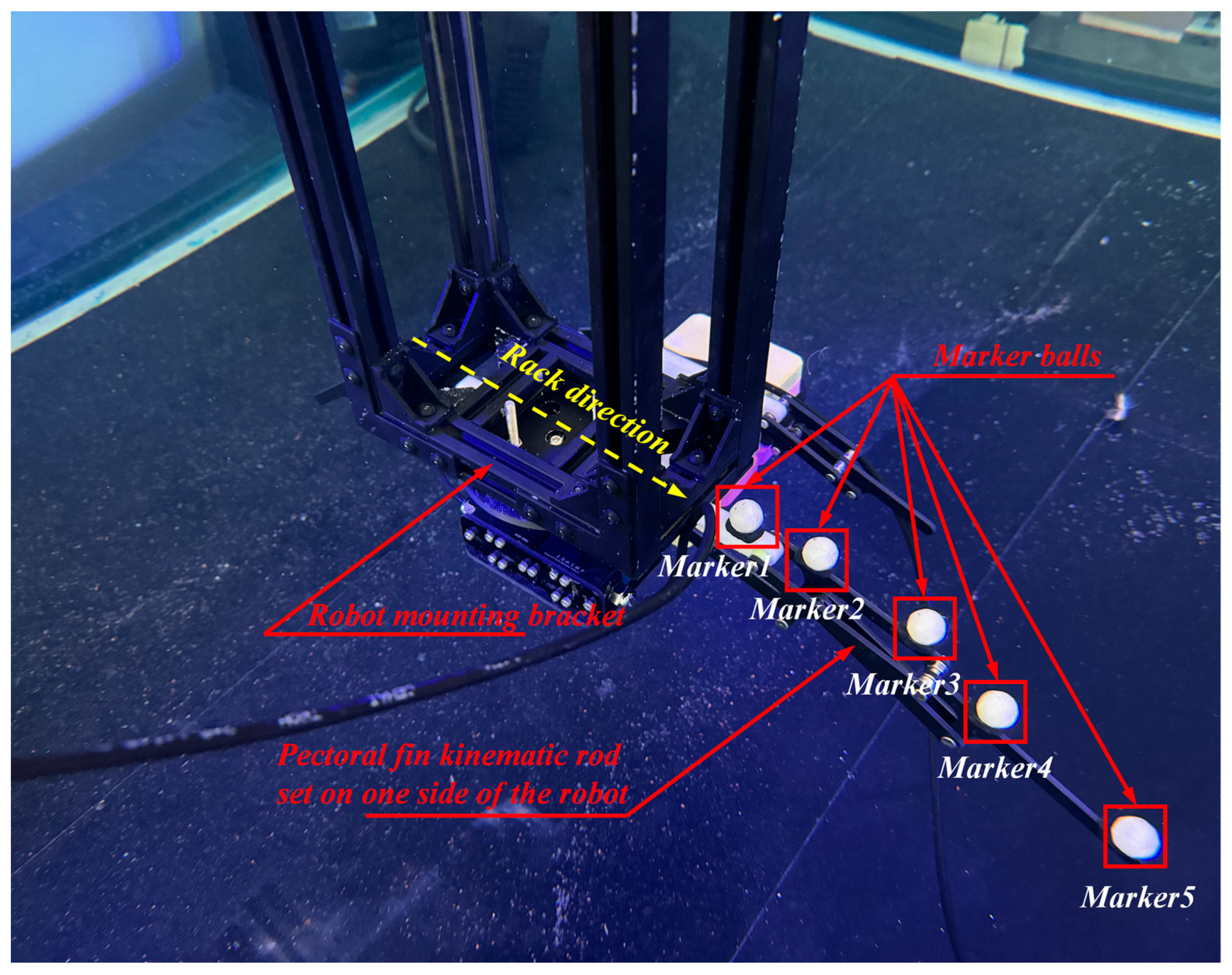
3.2. Underwater Motion Capture Experiment
3.3. Underwater Six-Dimensional Force Experiment
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, S.; Wu, Z.; Wang, J.; Feng, Y.; Tan, M.; Yu, J. Towards Efficient Intermittent-Propulsion Mode of a Novel Bioinspired Underwater Vehicle. IEEE Trans. Intell. Veh. 2024, 1–13. [Google Scholar] [CrossRef]
- Liu, T.; Liu, Y.; Zeng, R.; Gan, B.; Zhang, M.; Li, H.; Qu, S.; Zhou, H. A Bioinspired Multimotion Modality Underwater Microrobot. Sci. Adv. 2025, 11, eadu2527. [Google Scholar] [CrossRef] [PubMed]
- Ma, S.; Guo, W.; Song, R.; Liu, Y. Unsupervised Learning Based Coordinated Multi-Task Allocation for Unmanned Surface Vehicles. Neurocomputing 2021, 420, 227–245. [Google Scholar] [CrossRef]
- Prakash, A.; Nair, A.R.; Arunav, H.; Rthuraj, P.R.; Akhil, V.M.; Tawk, C.; Shankar, K.V. Bioinspiration and Biomimetics in Marine Robotics: A Review on Current Applications and Future Trends. Bioinspiration Biomim. 2024, 19, 031002. [Google Scholar] [CrossRef]
- Hussein, A.A.; Ragab, S.A.; Hajj, M.R.; Patil, M.J. Material and Geometric Effects on Propulsion of a Fish Tail. Bioinspiration Biomim. 2021, 16, 066008. [Google Scholar] [CrossRef] [PubMed]
- Luo, Y.; Xiao, Q.; Zhu, Q.; Pan, G. Jet Propulsion of a Squid-Inspired Swimmer in the Presence of Background Flow. Phys. Fluids 2021, 33, 031909. [Google Scholar] [CrossRef]
- Cui, Z.; Li, L.; Wang, Y.; Zhong, Z.; Li, J. Review of Research and Control Technology of Underwater Bionic Robots. Intell. Mar. Technol. Syst. 2023, 1, 7. [Google Scholar] [CrossRef]
- Wang, W.; Li, W.; Xu, J.; Dong, J.; Xiang, C.; Guan, Y.; Zhang, T. Design and Implementation of a Miniature Jellyfish-Inspired Robot. IEEE Robot. Autom. Lett. 2023, 8, 3134–3141. [Google Scholar] [CrossRef]
- Godaba, H.; Li, J.; Wang, Y.; Zhu, J. A Soft Jellyfish Robot Driven by a Dielectric Elastomer Actuator. IEEE Robot. Autom. Lett. 2016, 1, 624–631. [Google Scholar] [CrossRef]
- Liu, J.; Hu, H. Biological Inspiration: From Carangiform Fish to Multi-Joint Robotic Fish. J. Bionic Eng. 2010, 7, 35–48. [Google Scholar] [CrossRef]
- Yan, S.; Wu, Z.; Wang, J.; Huang, Y.; Tan, M.; Yu, J. Real-World Learning Control for Autonomous Exploration of a Biomimetic Robotic Shark. IEEE Trans. Ind. Electron. 2023, 70, 3966–3974. [Google Scholar] [CrossRef]
- Wang, R.; Wang, S.; Wang, Y.; Cheng, L.; Tan, M. Development and Motion Control of Biomimetic Underwater Robots: A Survey. IEEE Trans. Syst. Man. Cybern. Syst. 2022, 52, 833–844. [Google Scholar] [CrossRef]
- Zeng, X.; Xia, M.; Luo, Z.; Shang, J.; Xu, Y.; Yin, Q. Design and Control of an Underwater Robot Based on Hybrid Propulsion of Quadrotor and Bionic Undulating Fin. J. Mar. Sci. Eng. 2022, 10, 1327. [Google Scholar] [CrossRef]
- Shen, Y.; Ding, Z.; Wang, X.; Mao, Z.; Huang, Z.; Chen, B. Biomimetic Hydrofoil Propulsion: Harnessing the Propulsive Capabilities of Sea Turtles and Penguins for Robotics. Biomimetics 2025, 10, 272. [Google Scholar] [CrossRef]
- Song, Z.; Zhu, J.; Wang, C. Optimization of Semi-Active Hydrofoil Propulsion Performance Based on CFD Taguchi Method and Neural Network. Eur. J. Mech. B Fluids 2024, 105, 327–337. [Google Scholar] [CrossRef]
- Wang, Z.; Zheng, A.; Guo, S. Dynamics Evaluation of a Magnetic Actuated Soft Bionic Minirobot with Paired Fin. In Proceedings of the 2024 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2024; pp. 674–678. [Google Scholar]
- Su, Z.; Yu, F.; Zhu, B.; Han, W.; Wang, Q.; Li, W. Dynamic Analysis of the Sinusoidal Actuation of a Flexible Fin for Paired Fin Propulsion. Phys. Fluids 2022, 34, 051909. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Zhang, T.; Li, S.; Zeng, Y.; Chen, L.; Hu, Q. Hydrodynamic Performance of a Biomimetic Undulating Fin Robot under Different Water Conditions. Ocean Eng. 2023, 288, 116068. [Google Scholar] [CrossRef]
- Xu, L.; Mei, T.; Huan, J.; Luo, M.; Wei, X.; Cao, K. Research on Dynamical Mechanism and Propulsion System of a Biped Robot Walking on Water. Robot 2013, 35, 257. [Google Scholar] [CrossRef]
- Mignano, A.P.; Kadapa, S.; Drago, A.C.; Lauder, G.V.; Kwatny, H.G.; Tangorra, J.L. Fish Robotics: Multi-Fin Propulsion and the Coupling of Fin Phase, Spacing, and Compliance. Bioinspiration Biomim. 2024, 19, 026006. [Google Scholar] [CrossRef]
- Luo, Y.; Hou, Z.; Chen, D.; Xu, T.; Huang, Q.; Ye, P.; Pan, G. Study on the Hydrodynamics of a Cownose Ray’s Flapping Pectoral Fin Model near the Ground. J. Mar. Sci. Eng. 2024, 12, 2024. [Google Scholar] [CrossRef]
- Zhang, L.; Bi, S.; Cai, Y.; Niu, C.; Ma, H. Effect Analysis of Chordwise Flexibility on Propulsion Performance of Oscillating Pectoral Foils. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; pp. 765–770. [Google Scholar]
- Chen, L.; Bi, S.; Cai, Y.; Cao, Y.; Pan, G. Design and Experimental Research on a Bionic Robot Fish with Tri-Dimensional Soft Pectoral Fins Inspired by Cownose Ray. J. Mar. Sci. Eng. 2022, 10, 537. [Google Scholar] [CrossRef]
- Cai, Y.; Bi, S.; Zheng, L. Design Optimization of a Bionic Fish with Multi-Joint Fin Rays. Adv. Robot. 2012, 26, 177–196. [Google Scholar] [CrossRef]
- Yu, Z.; Li, K.; Ji, Y.; Yang, S.X. Fast Motion Performance of a Bionic Ray Robot with Serial Pectoral Fins. IEEE Robot. Autom. Lett. 2023, 8, 7218–7225. [Google Scholar] [CrossRef]
- He, J.; Cao, Y.; Huang, Q.; Cao, Y.; Tu, C.; Pan, G. A New Type of Bionic Manta Ray Robot. In Proceedings of the Global Oceans 2020: Singapore—U.S. Gulf Coast, Online, 5–30 October 2020; pp. 1–6. [Google Scholar]
- Wang, R.; Zhang, C.; Zhang, Y.; Yang, L.; Qin, H.; Zhang, Q.; Yang, Y.; Liu, L. Soft Manta Ray Robot Based on Bilateral Bionic Muscle Actuator. IEEE Robot. Autom. Lett. 2024, 9, 7723–7730. [Google Scholar] [CrossRef]
- He, J.; Cao, Y.; Huang, Q.; Pan, G.; Dong, X.; Cao, Y. Effects of Bionic Pectoral Fin Rays’ Spanwise Flexibility on Forwarding Propulsion Performance. J. Mar. Sci. Eng. 2022, 10, 783. [Google Scholar] [CrossRef]
- Sameh, A.; Fanni, M.; Parque, V.; Mohamed, A.M. Development of a Balanced 3D Translational Interconnected Manipulator with Solely Rotary Joints/Actuators and Free-Internal-Singularity Workspace. IEEE Access 2021, 9, 167880–167899. [Google Scholar] [CrossRef]
- Sun, Q.; Wu, J.; Sheng, C.; Hu, S.; Wang, Z.; Huang, H. Design and Implementation of Multi-Level Linkage Mechanism Bionic Pectoral Fin for Manta Ray Robot. Ocean. Eng. 2023, 284, 115152. [Google Scholar] [CrossRef]
- Zhang, Y.; Deng, X.; Zhou, B.; Zhao, P. Design and Optimization of a Multi-Mode Single-DOF Watt-I Six-Bar Mechanism with One Adjustable Parameter. In Proceedings of the Advances in Mechanism, Machine Science and Engineering in China. CCMMS 2022, Yantai, China, 30 July–1 August 2022; Lecture Notes in Mechanical Engineering. Springer: Singapore, 2023; pp. 1373–1390. [Google Scholar] [CrossRef]
- Tuleshov, A.; Halicioglu, R.; Shadymanova, A.; Kuatova, M. Kinematic Synthesis Method and Eccentricity Effects of a Stephenson Mechanism. Mech. Sci. 2021, 12, 1–8. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chu, Y.; Wang, X.; Hao, T.; Fu, Y.; Duan, Y.; Yu, T. Design and Performance Study of a Six-Bar Mechanism Underwater Robot Based on Cownose Ray Bionics. J. Mar. Sci. Eng. 2025, 13, 1156. https://doi.org/10.3390/jmse13061156
Chu Y, Wang X, Hao T, Fu Y, Duan Y, Yu T. Design and Performance Study of a Six-Bar Mechanism Underwater Robot Based on Cownose Ray Bionics. Journal of Marine Science and Engineering. 2025; 13(6):1156. https://doi.org/10.3390/jmse13061156
Chicago/Turabian StyleChu, Yichen, Xiaohan Wang, Tiancheng Hao, Yanhui Fu, Yubing Duan, and Tianbiao Yu. 2025. "Design and Performance Study of a Six-Bar Mechanism Underwater Robot Based on Cownose Ray Bionics" Journal of Marine Science and Engineering 13, no. 6: 1156. https://doi.org/10.3390/jmse13061156
APA StyleChu, Y., Wang, X., Hao, T., Fu, Y., Duan, Y., & Yu, T. (2025). Design and Performance Study of a Six-Bar Mechanism Underwater Robot Based on Cownose Ray Bionics. Journal of Marine Science and Engineering, 13(6), 1156. https://doi.org/10.3390/jmse13061156