Research on an Ice-Breaking Mechanism Using Subglacial Resonance


Abstract
1. Introduction
2. Basic Analysis of the Resonance Ice-Breaking Mechanism
3. Resonance Ice-Breaking Experiments and Numerical Simulations
3.1. Ice Layer Design, Finite Element Modeling, and Modal Numerical Analysis
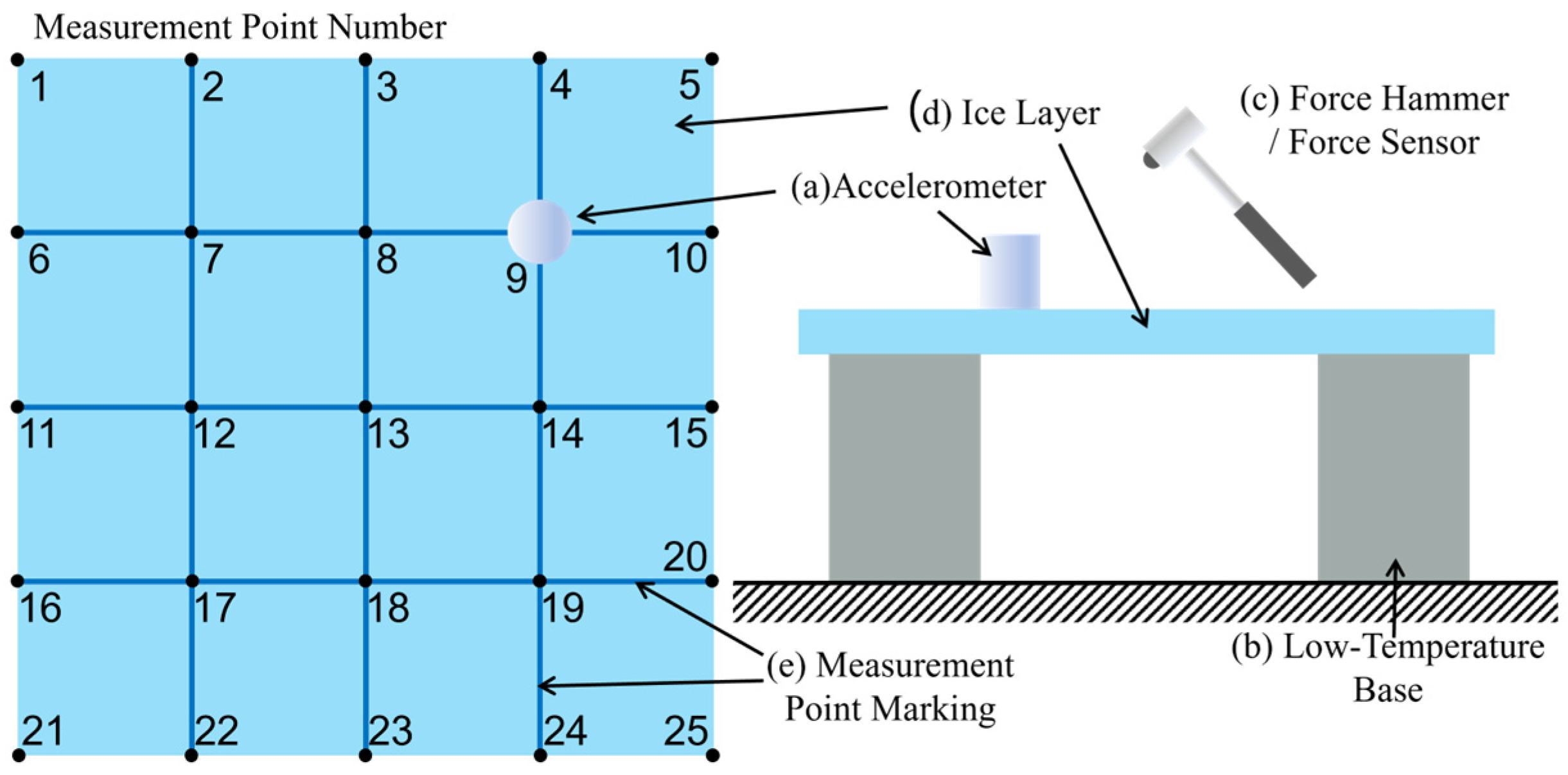
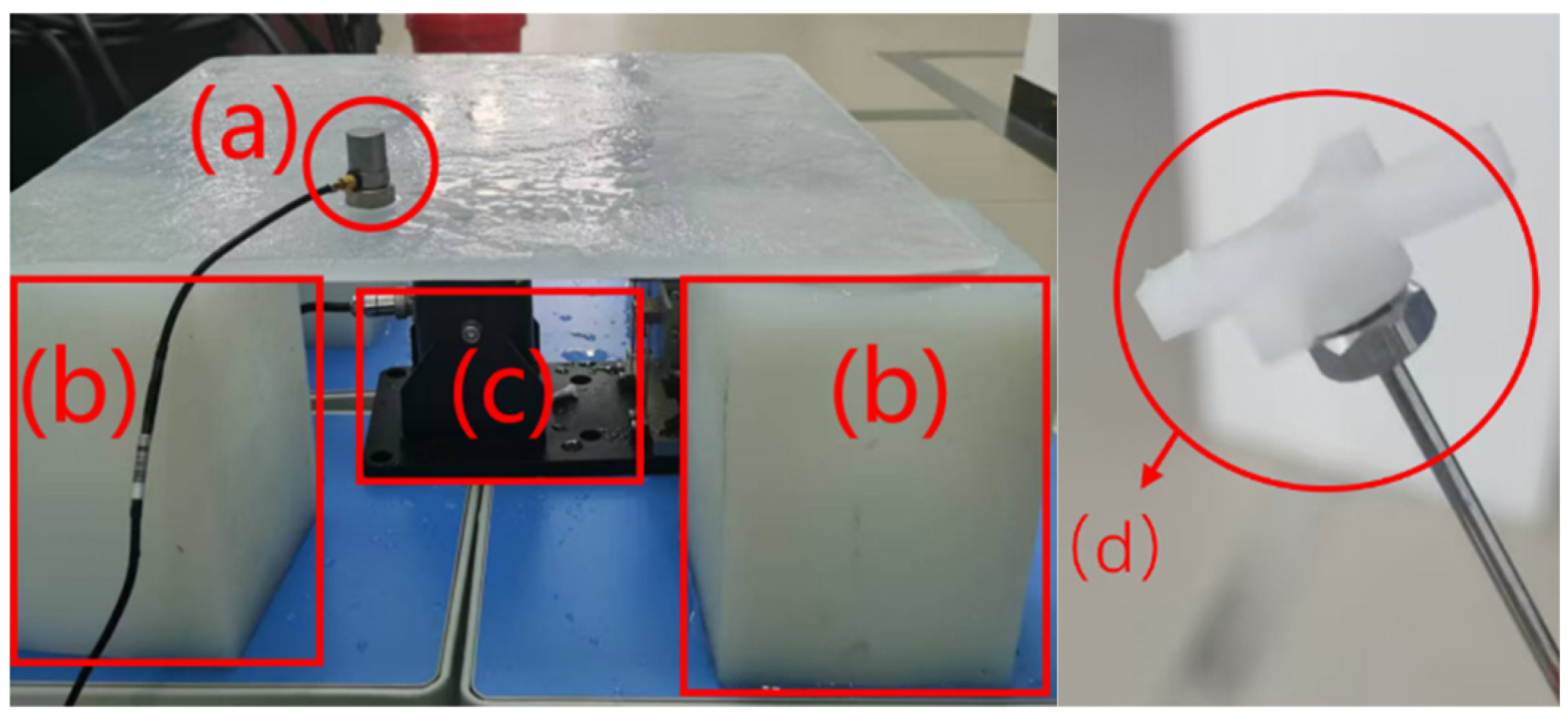
3.2. Natural Frequency Experiment of the Ice Layer
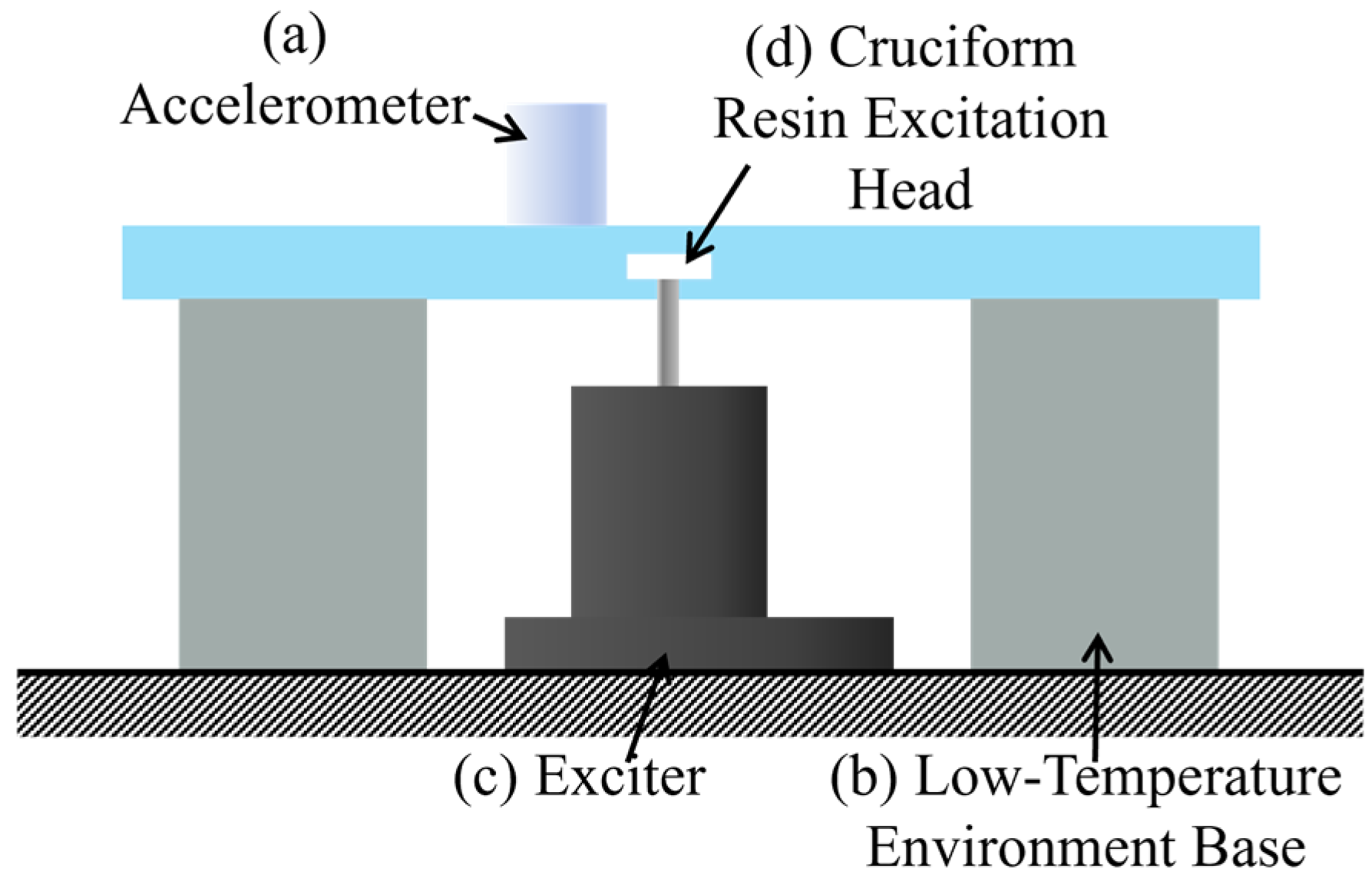
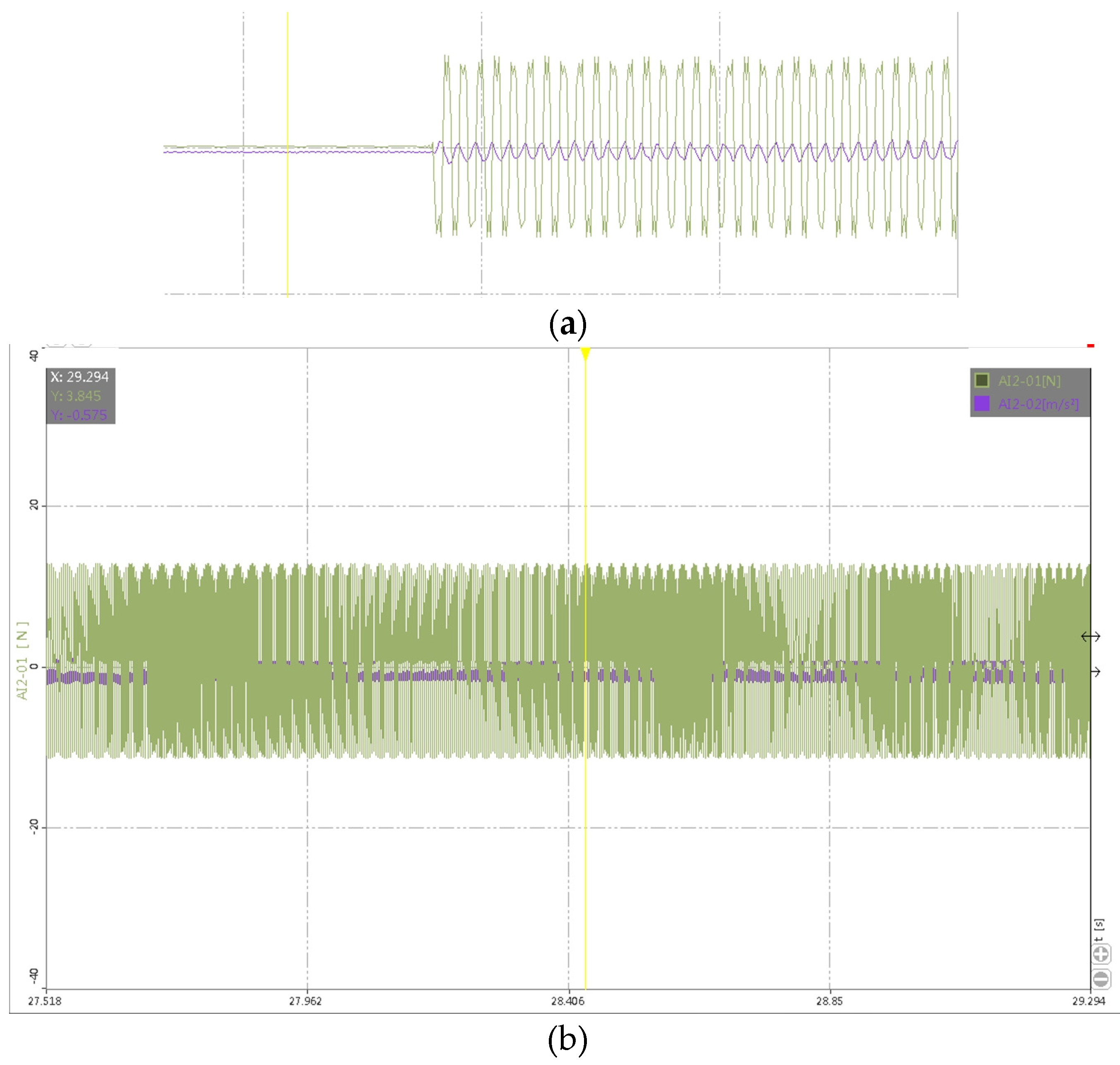
3.3. Ice Layer Excitation Experiment
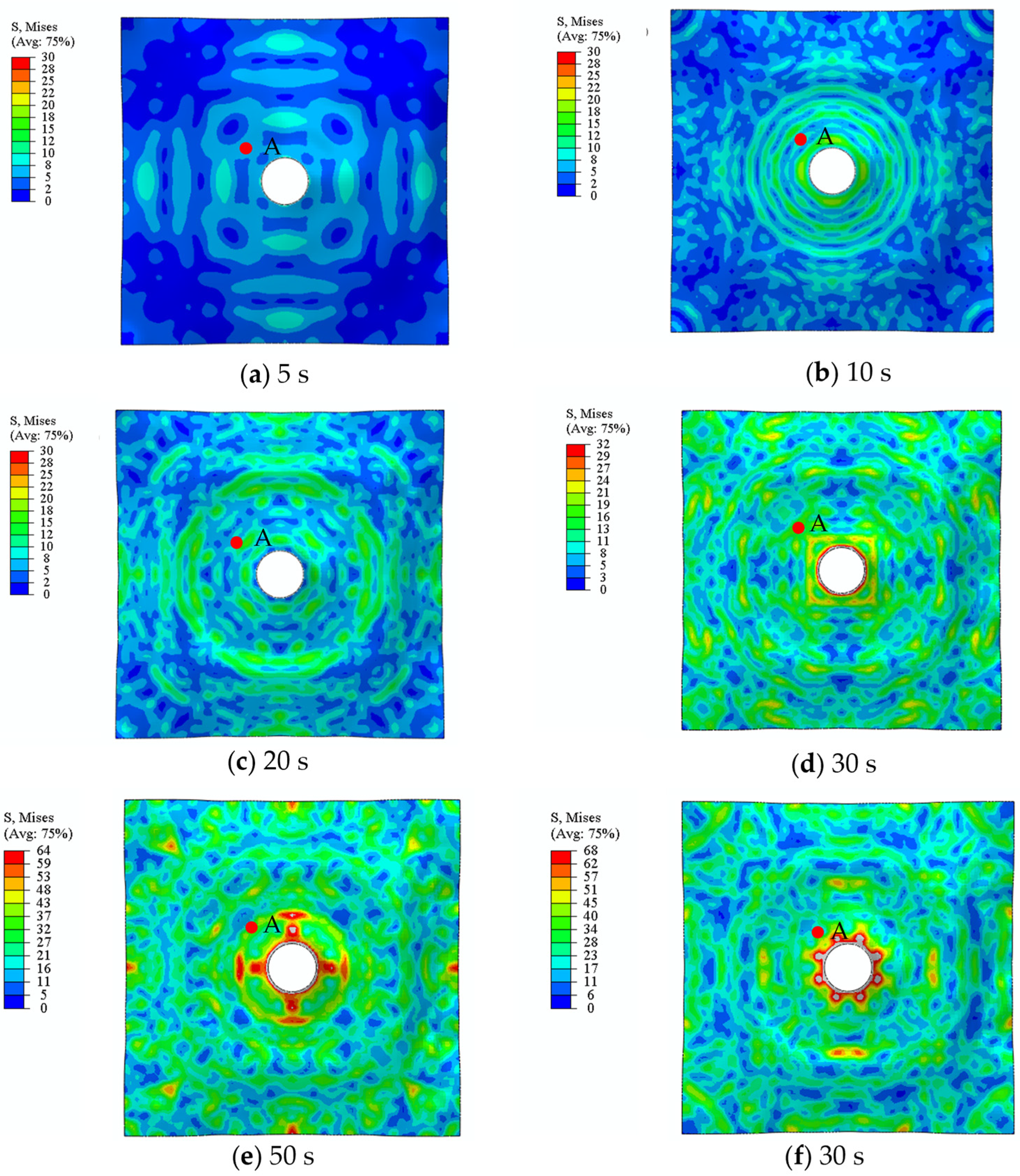
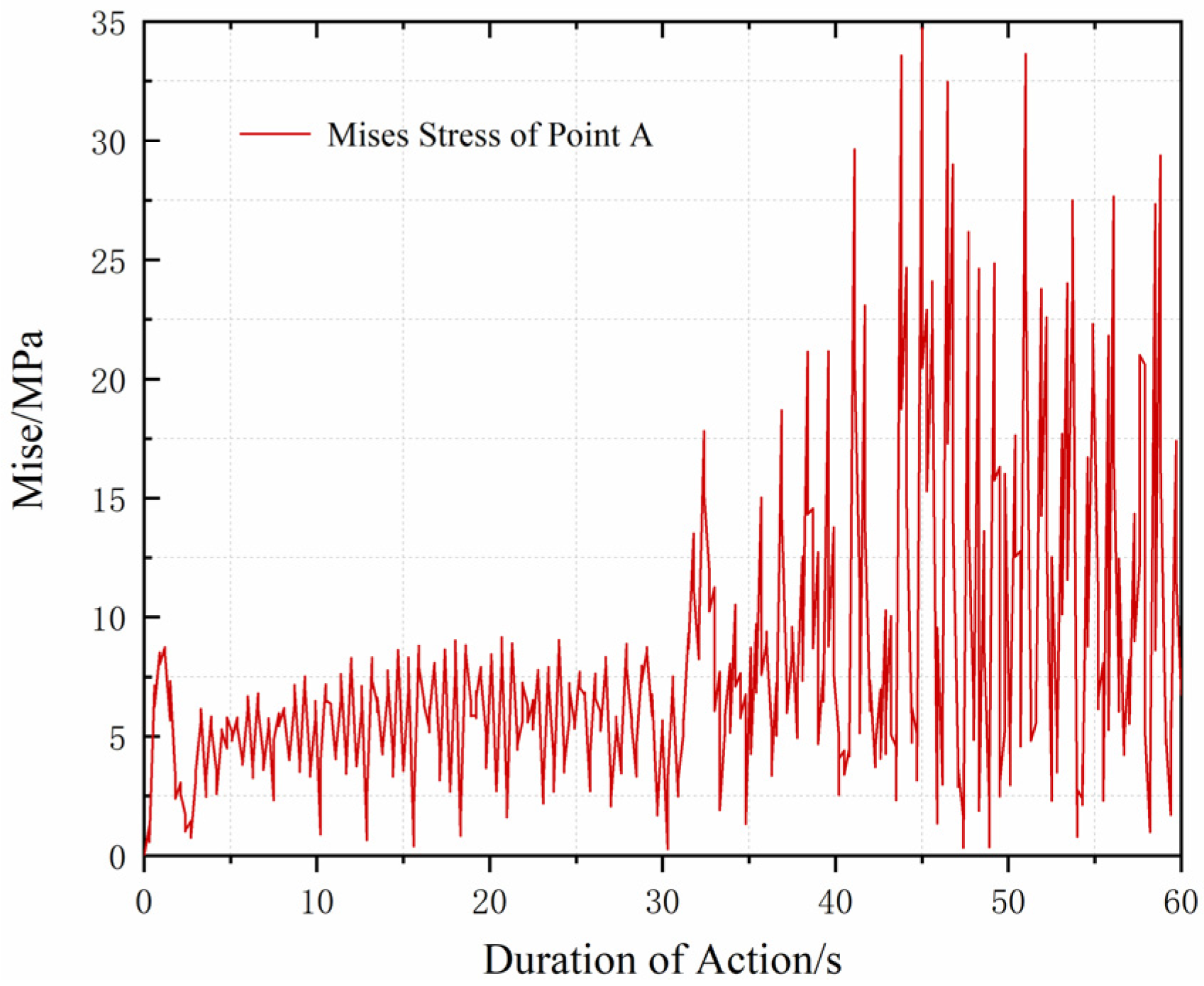
3.4. Numerical Simulation Analysis of Ice Layer Excitation Response
4. Conclusions and Future Work
- (1)
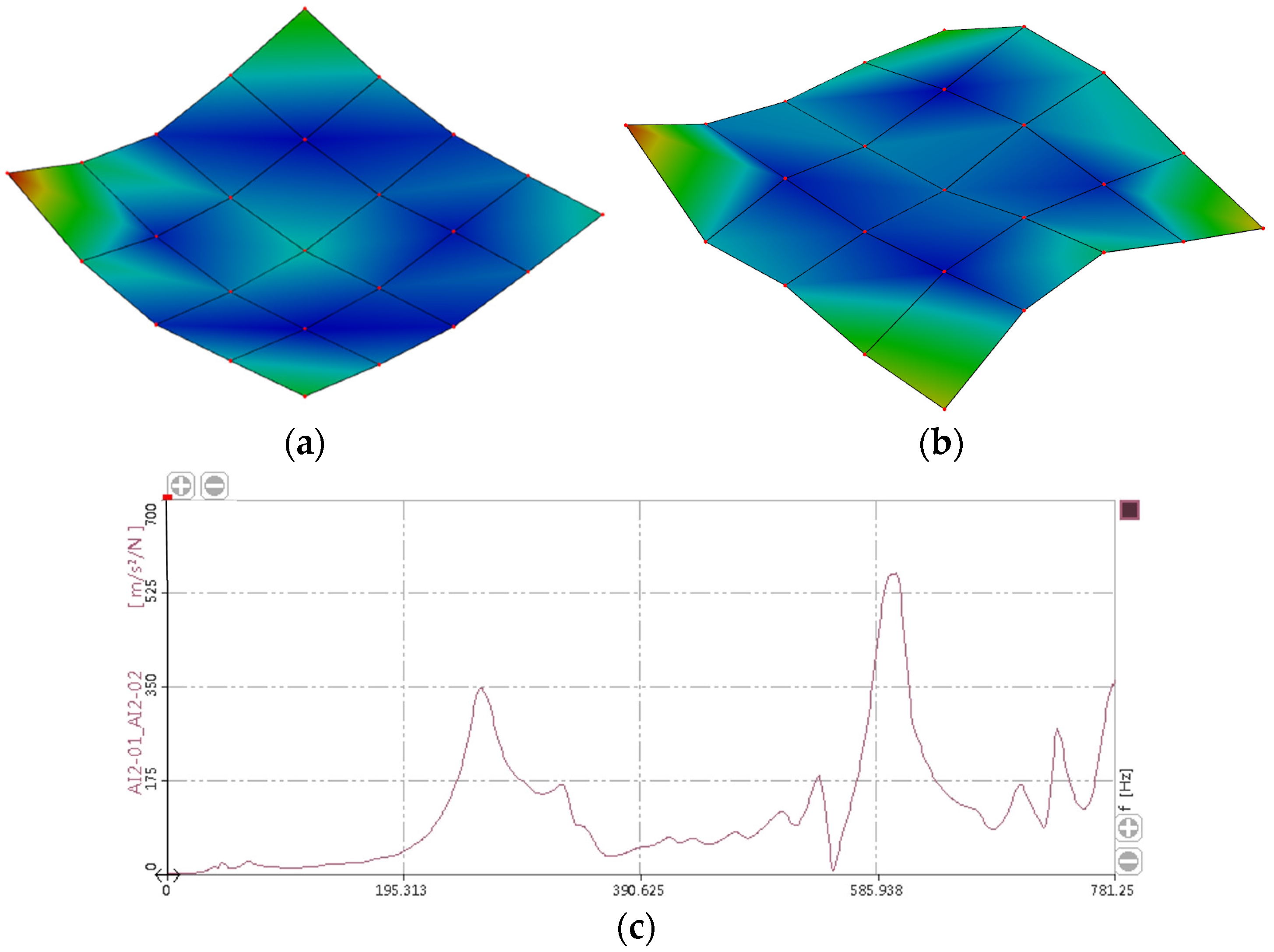
- A comparison between the ice layer vibration mode analysis results based on the Abaqus software and the experimental modal results obtained from the ice layer impact test revealed that the error in the Ω1 was 0.53%, while the error in the second-order modal simulation was 14.937%. Since the 1 × 1 order modal was used in the simulation, which has a lower error, this simulation method can accurately simulate the vibration modes and frequencies of the ice layer.
- (2)
- Based on Conclusion (1), for ice materials with unknown moduli, the actual modes and frequencies of ice specimens can be determined using the impact method. The modulus of the ice material can then be accurately calculated in reverse using the aforementioned simulation method.
- (3)
- The results of the ice layer excitation experiments and numerical simulation analysis of the ice layer’s excitation response indicate that resonance occurring in the ice layer under the excitation load is sufficient to generate stresses that reach the strength limit of the ice material over a large area and produce cracks.
- (1)
- Although a low-modulus resin excitation head was used in the excitation experiment, the head still penetrated and created cavities in the ice layer during the experiment. This caused the excitation load to be unable to continuously and stably transmit to the ice layer after cracks appeared, preventing the ice layer from fracturing and resulting in less pronounced experimental effects. Additionally, due to the limitations of the laboratory exciter, it is difficult to induce beat phenomena in thicker ice layers, so only thinner ice layers were studied. Future research will address these two issues by improving the experimental scheme and expanding the scope of the study.
- (2)
- Since this study only focused on thinner ice layers, shell elements were used for the finite element analysis when exploring the mechanism of resonance ice-breaking through numerical simulation. When the research object expands from thin ice plates to thicker ice layers, solid elements should be used for simulation, and appropriate constitutive relationships for the ice material should be selected to simulate the fracturing of the ice layer under the excitation load through finite element simulation. Moreover, the loading method of the excitation load in numerical simulation should be improved to avoid stress concentration, which could affect the analysis.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ye, L.; Wang, C.; Guo, C.; Chang, X. Peri dynamic model for submarine surfacing through ice. Chin. J. Ship Res. 2018, 13, 51–59. [Google Scholar] [CrossRef]
- Bai, T.C.; Xu, J.; Wang, G.D.; Yu, K.; Hu, X. Analysis of resistance and flow field of submarine sailing near the ice surface. Chin. J. Ship Res. 2021, 16, 36–48. [Google Scholar]
- Engelbrektson, A. Observations of a resonance vibrating lighthouse structure in moving ice. In Proceedings of the Seventh POAC Conference, Helsinki, Finland, 5–9 April 1983; Volume 2, pp. 855–864. [Google Scholar]
- Määttänen, M. Dynamic Ice-Structure Interaction During Continuous Crushing; US Army Corps of Engineers, Cold Regions Research & Engineering Laboratory: Hanover, NH, USA, 1983. [Google Scholar]
- Tsuchiya, M.; Kanie, S.; Ikejiri, K.; Ikejiri, A.; Saeki, H. An experimental study on ice-structure interaction. In Proceedings of the Offshore Technology Conference. OTC, Houston, TX, USA, 6–9 May 1985; p. OTC-5055-MS. [Google Scholar]
- Matlock, H.; Dawkins, W.P.; Panak, J. Analytical model for ice-structure interaction. J. Eng. Mech. Div. 1971, 97, 1083–1092. [Google Scholar] [CrossRef]
- Shih, L.Y. Analysis of ice-induced vibrations on a flexible structure. Appl. Math. Model. 1991, 15, 632–638. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, Q.; Wang, T. Research on the deicing robot and motion characteristic of the four divisions high-voltage line. IOP Conf. Ser. Mater. Sci. Eng. 2018, 417, 012008. [Google Scholar] [CrossRef]
- Kandagal, S.B.; Venkatraman, K. Piezo-actuated vibratory deicing of a flat plate. In Proceedings of the 46th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Austin, TX, USA, 18–21 April 2005; p. 2115. [Google Scholar]
- Kong, X.; Guan, H.; Jiang, L.; Wang, Y.; Zhang, C. Icing detection on ADSS transmission optical fiber cable based on improved YOLOv8 network. Signal Image Video Process. 2024, 18, 5323–5332. [Google Scholar] [CrossRef]
- He, X.; Ma, Y.; Wang, K.; Liu, C. The oretical study and simulation analysis of distributed vibration de-icing technology for medium voltage overhead lines. Appl. Math. Nonlinear Sci. 2025, 10, 1. [Google Scholar]
- Xu, P.; Zhang, D.; Li, A. The de-icing method using synthesized envelope modulation signals from resonance low-frequency and ultrasonic signals. Appl. Acoust. 2025, 231, 110411. [Google Scholar] [CrossRef]
- Dai, H.; Lang, J.; Pang, F.; Wang, Y. Research on Mechanism and Application of Ship Resonance Ice-Breaking. In Proceedings of the25th IAHR International Symposium on Ice, Dalian, China, 22–25 November 2020. [Google Scholar]
- Bažant, Z.P.; Luo, W.; Chau, V.T.; Bessa, M.A. Wave dispersion and basic concepts of peridynamics compared to classical nonlocal damage models. J. Appl. Mech. 2016, 83, 111004. [Google Scholar] [CrossRef]
- Kirane, K.; Su, Y.; Bažant, Z.P. Strain-rate-dependent microplane model for high-rate comminution of concrete under impact based on kinetic energy release theory. Proc. R. Soc. A Math. Phys. Eng. Sci. 2015, 471, 20150535. [Google Scholar] [CrossRef]
- Shi, D.; Wang, Q.; Shi, X.; Pang, F. Free vibration analysis of moderately thick rectangular plates with variable thickness and arbitrary boundary conditions. Shock Vib. 2014, 2014, 572395. [Google Scholar] [CrossRef]
- Du, Y.; Tang, Y.; Pang, F.; Ma, Y.; Zou, Y. A Semi-Analytical Method to Design Distributed Dynamic Vibration Absorber of Beam Under General Elastic Edge Constraints. Int. J. Struct. Stab. Dyn. 2024, 24, 2450181. [Google Scholar] [CrossRef]
- Chai, W.; Leira, B.J.; Høyland, K.V.; Sinsabvarodom, C.; Yu, Z. Statis-tics of thickness and strength of first-year ice along the Northern Sea Route. J. Mar. Sci. Technol. 2021, 26, 331–343. [Google Scholar] [CrossRef]
- Lv, X.; Shi, D. Free vibration of arbitrary-shaped laminated triangular thin plates with elastic boundary conditions. Results Phys. 2018, 11, 523–533. [Google Scholar] [CrossRef]
- Xue, Y.; Liu, R.; Li, Z.; Han, D. A review for numerical simulation methods of ship–ice interaction. Ocean. Eng. 2020, 215, 107853. [Google Scholar] [CrossRef]
- Cui, W.; Kong, D.; Sun, T.; Yan, G. Coupling dynamic characteristics of high-speed water-entry projectile and ice sheet. Ocean. Eng. 2023, 275, 114090. [Google Scholar] [CrossRef]
- Song, Z.; Chen, R.; Guo, D.; Yu, C. Experimental investigation of dynamic shear mechanical properties and failure criterion of ice at high strain rates. Int. J. Impact Eng. 2022, 166, 104254. [Google Scholar] [CrossRef]
- Dönmez, A.; Bažant, Z.P. Size effect on punching strength of reinforced concrete slabs with and without shear reinforcement. ACI Struct. J. 2017, 114, 875. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Density (kg/m3) | Elastic Modulus (GPa) | Poisson’s Ratio | Ultimate Strength (MPa) |
|---|---|---|---|
| 816 | 10 | 0.33 | 1.8 |
| 1 cm Ice Layer Modal Analysis | Experimental Modal Frequency (Hz) | Simulated Modal Frequency (Hz) | Relative Error |
|---|---|---|---|
| 1st × 1st | 257.798 | 259.18 Hz | 0.53% |
| 1st × 2nd | 325.761 | 383.20 Hz | 14.937% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, Z.; Zhu, Z.; Tong, B.; Hu, N.; Hu, M.; Liu, Y. Research on an Ice-Breaking Mechanism Using Subglacial Resonance. J. Mar. Sci. Eng. 2025, 13, 1147. https://doi.org/10.3390/jmse13061147
Tian Z, Zhu Z, Tong B, Hu N, Hu M, Liu Y. Research on an Ice-Breaking Mechanism Using Subglacial Resonance. Journal of Marine Science and Engineering. 2025; 13(6):1147. https://doi.org/10.3390/jmse13061147
Chicago/Turabian StyleTian, Zegang, Zixu Zhu, Bo Tong, Nianming Hu, Mingyong Hu, and Yongbao Liu. 2025. "Research on an Ice-Breaking Mechanism Using Subglacial Resonance" Journal of Marine Science and Engineering 13, no. 6: 1147. https://doi.org/10.3390/jmse13061147
APA StyleTian, Z., Zhu, Z., Tong, B., Hu, N., Hu, M., & Liu, Y. (2025). Research on an Ice-Breaking Mechanism Using Subglacial Resonance. Journal of Marine Science and Engineering, 13(6), 1147. https://doi.org/10.3390/jmse13061147