Motion Control of a Flexible-Towed Underwater Vehicle Based on Dual-Winch Differential Tension Coordination Control



Abstract
1. Introduction
- (1)
- Coordinated control of the dual-winch towing system with dual-actuator input saturation constraints.
- (2)
- High-precision position tracking control of the underwater vehicle under nonlinear time-varying disturbances.
1.1. Literature Review
- (1)
- Dual-Motor Coordination Control
- (2)
- Dynamic position tracking control
- (1)
- Existing coordinated strategies have difficulty achieving tension–position coupling control.
- (2)
- There is a lack of integrated solutions for precise position control that simultaneously avoid saturation and suppress disturbances.
1.2. Research Focus
2. Modeling of Underwater Vehicles and Traction Systems
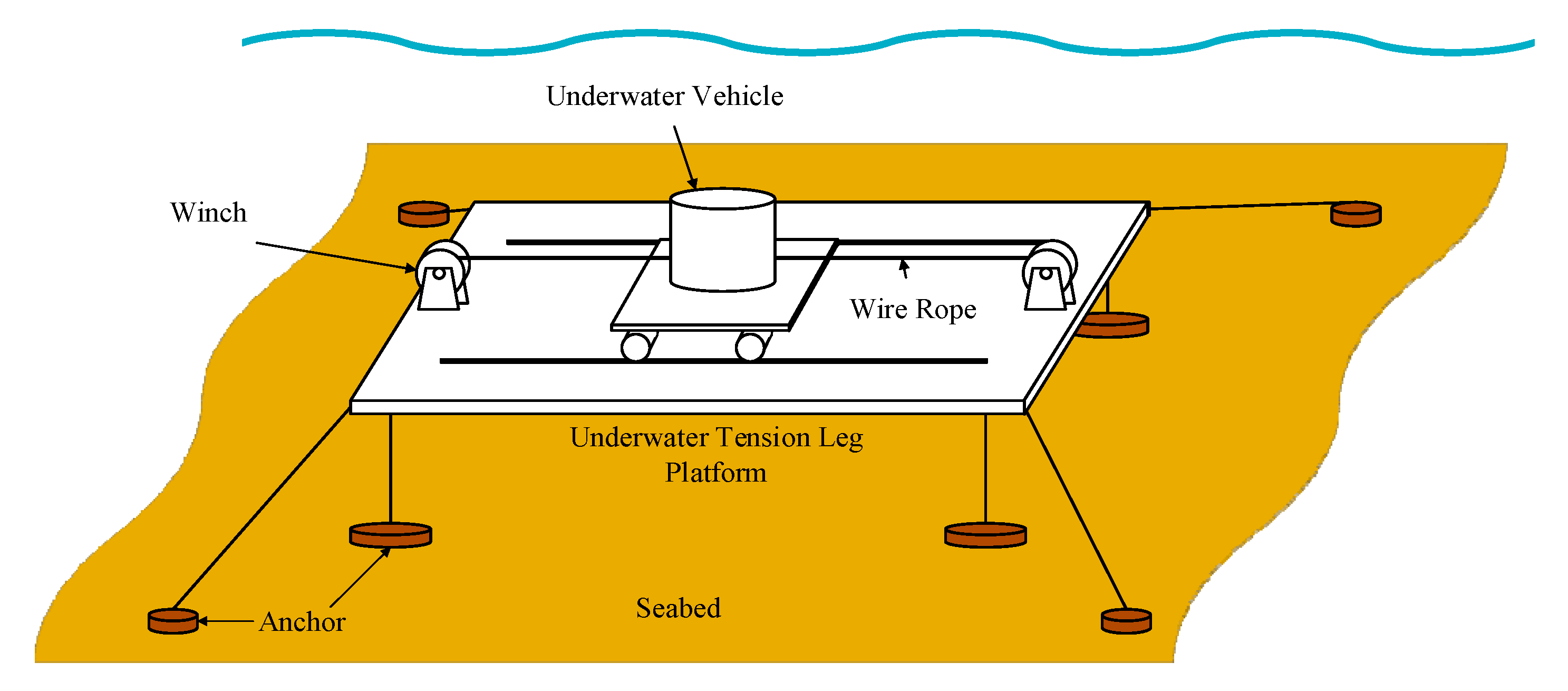
2.1. Structure of the System
2.2. Modeling of the Wire Rope
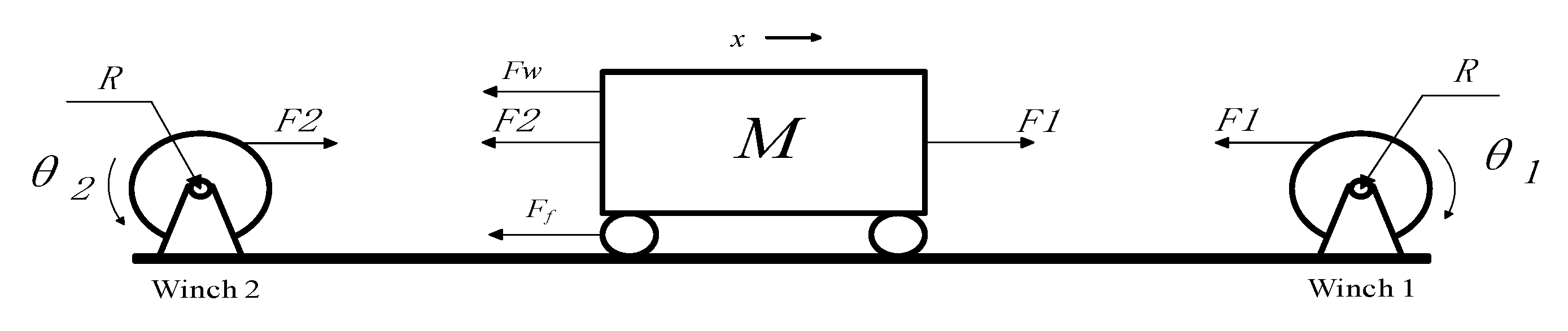
2.3. Modeling of the Underwater Vehicle
- (a)
- Directional randomness persists within the horizontal plane.
- (b)
- Temporal variations exhibit characteristic frequencies below the vehicle’s control bandwidth.
2.4. Modeling of the Winches
2.5. Problem Formulation
- (a)
- Coordinated control of dual winches: Achieve precise allocation and coordinated regulation of wire ropes towing forces by dynamically adjusting the output torques of the two winches. This ensures the system can both generate required resultant towing forces for vehicle motion and suppress wire rope tension chattering while avoiding actuator input saturation.
- (b)
- Vehicle-trajectory-tracking control: Drive the underwater vehicle to follow desired trajectories under nonlinear time-varying hydrodynamic disturbances, requiring rapid convergence and sustained high-precision tracking performance of position errors.
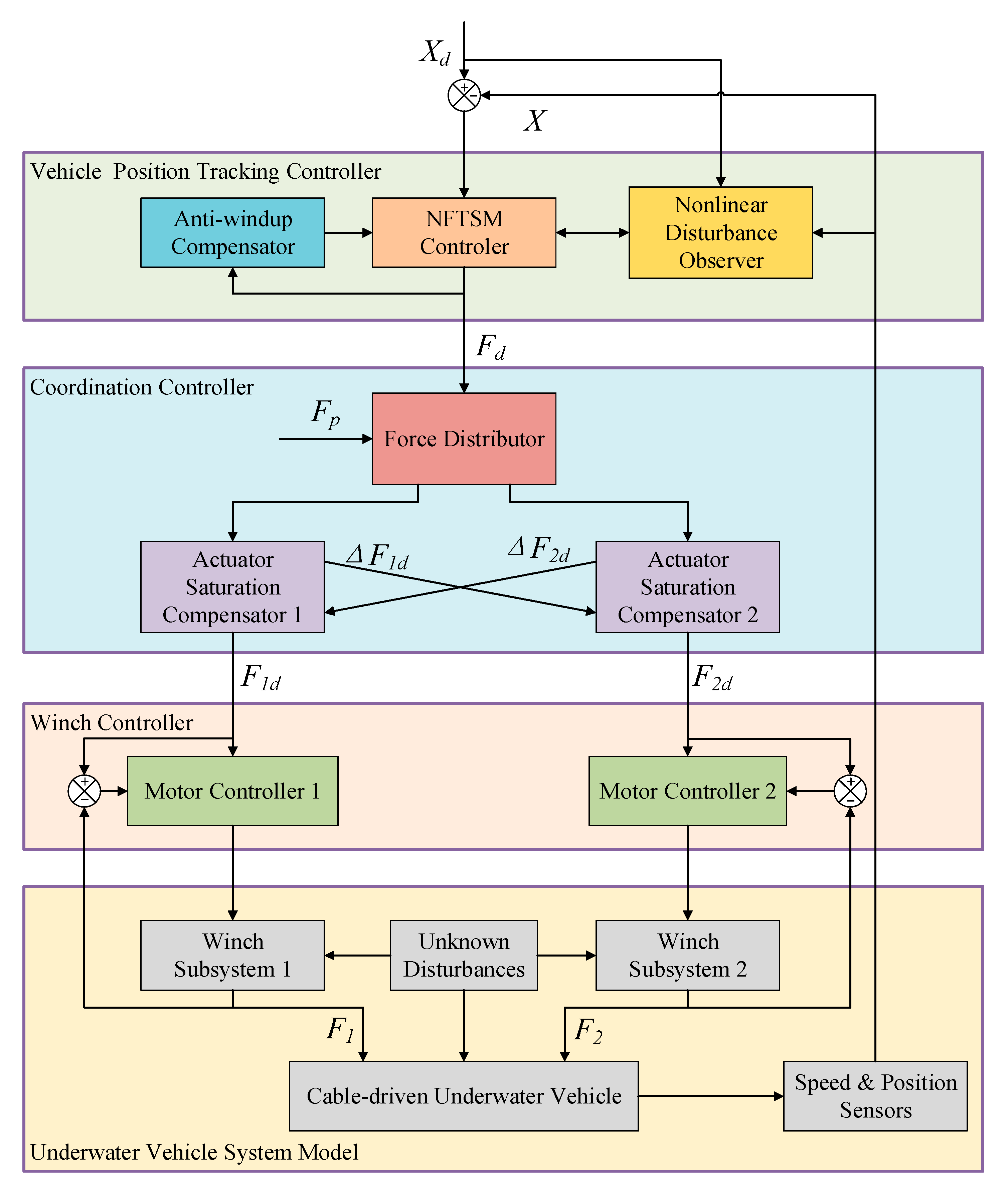
3. Control Design
3.1. Design of Vehicle-Position-Tracking Controller
3.1.1. Nonsingular Fast-Terminal Sliding-Mode Controller
3.1.2. Saturation Compensation of the Actuators
3.1.3. Fuzzy Adaptive Nonlinear Disturbance Observer
3.1.4. Total Control Law of the Position Tracking Controller
3.1.5. Proof of Stability
3.2. Design of Dual-Motor Coordination Controller
3.3. Design of Winch Controller
4. Simulation Results
4.1. Simulation Preparation
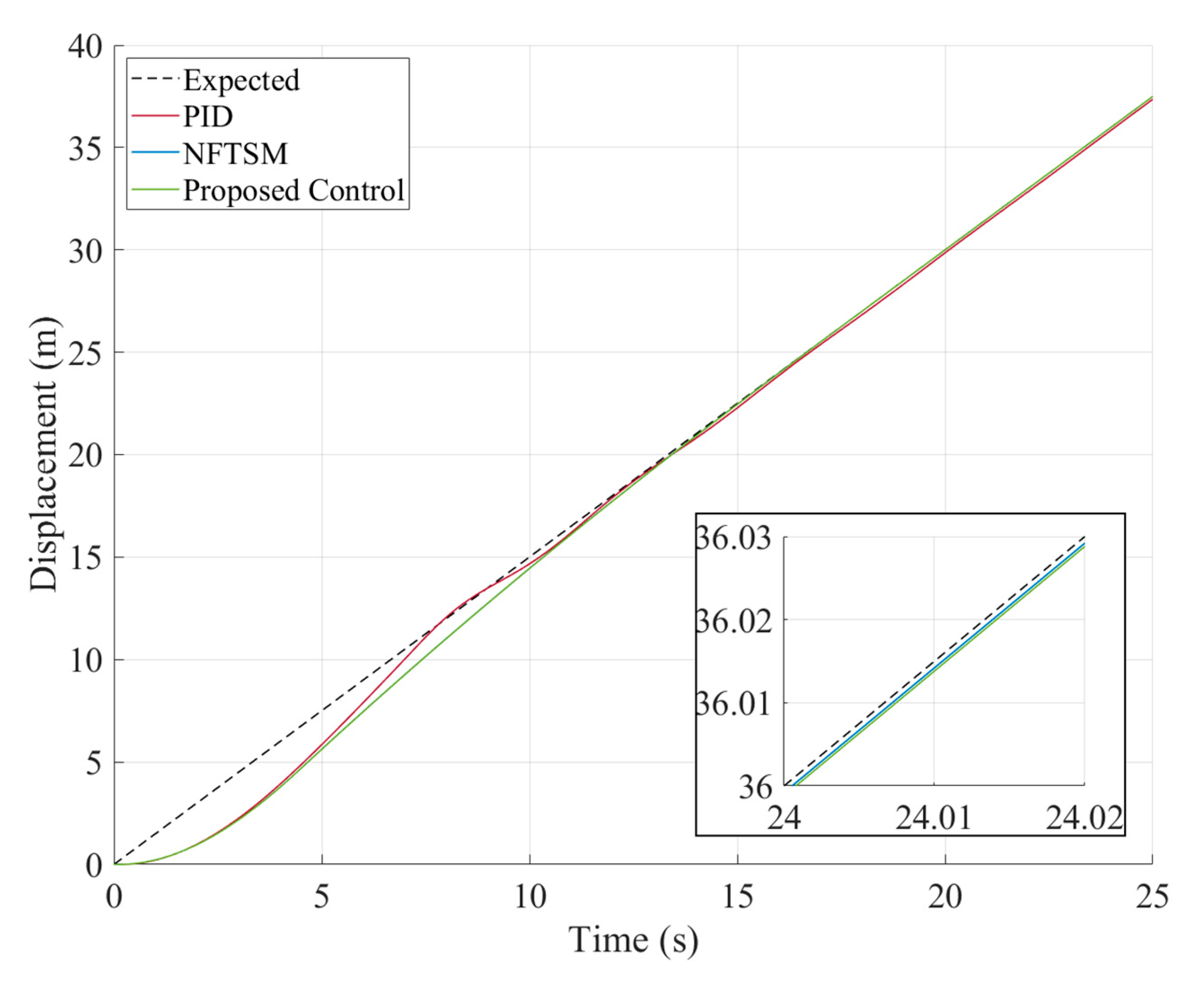
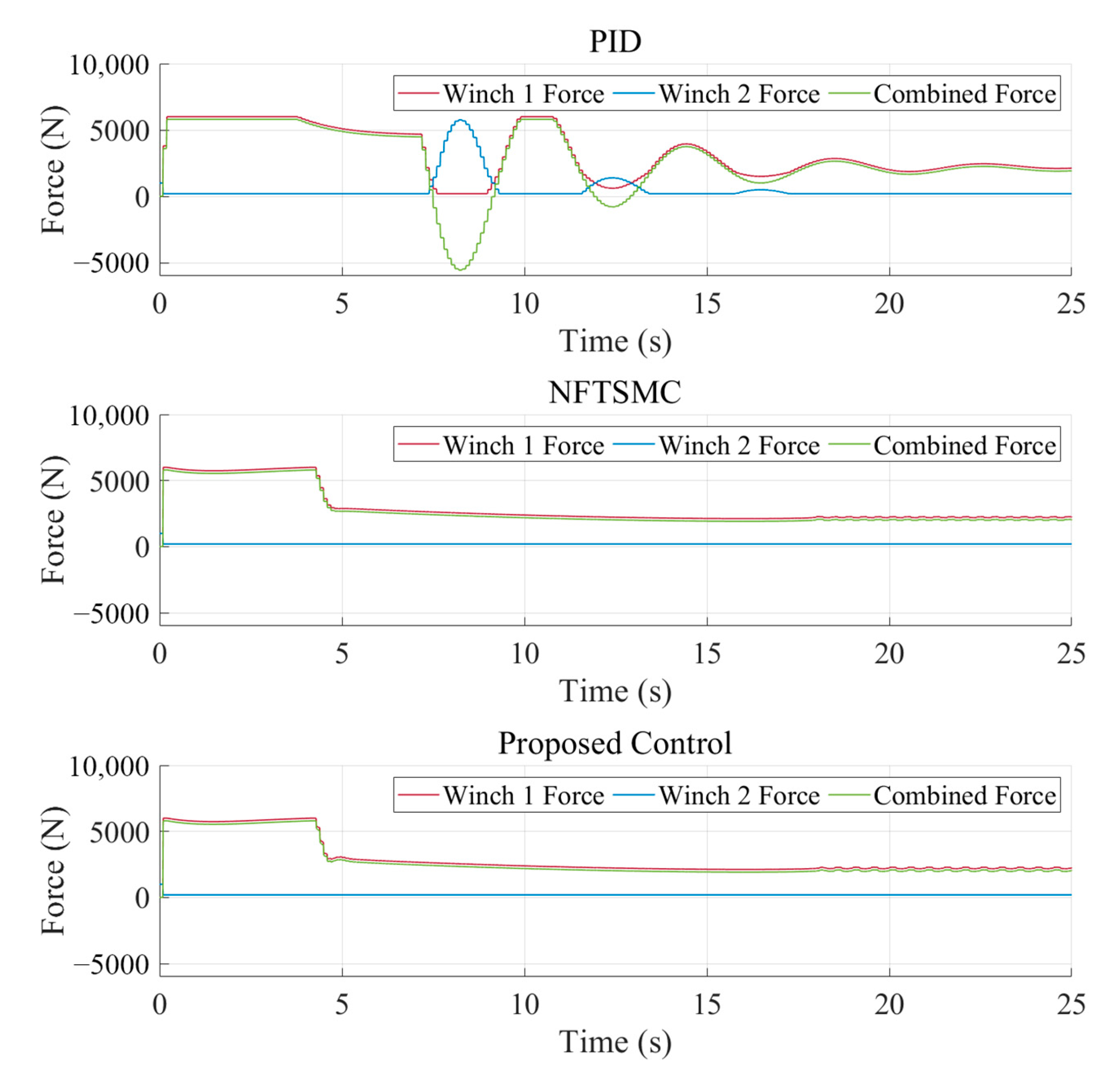
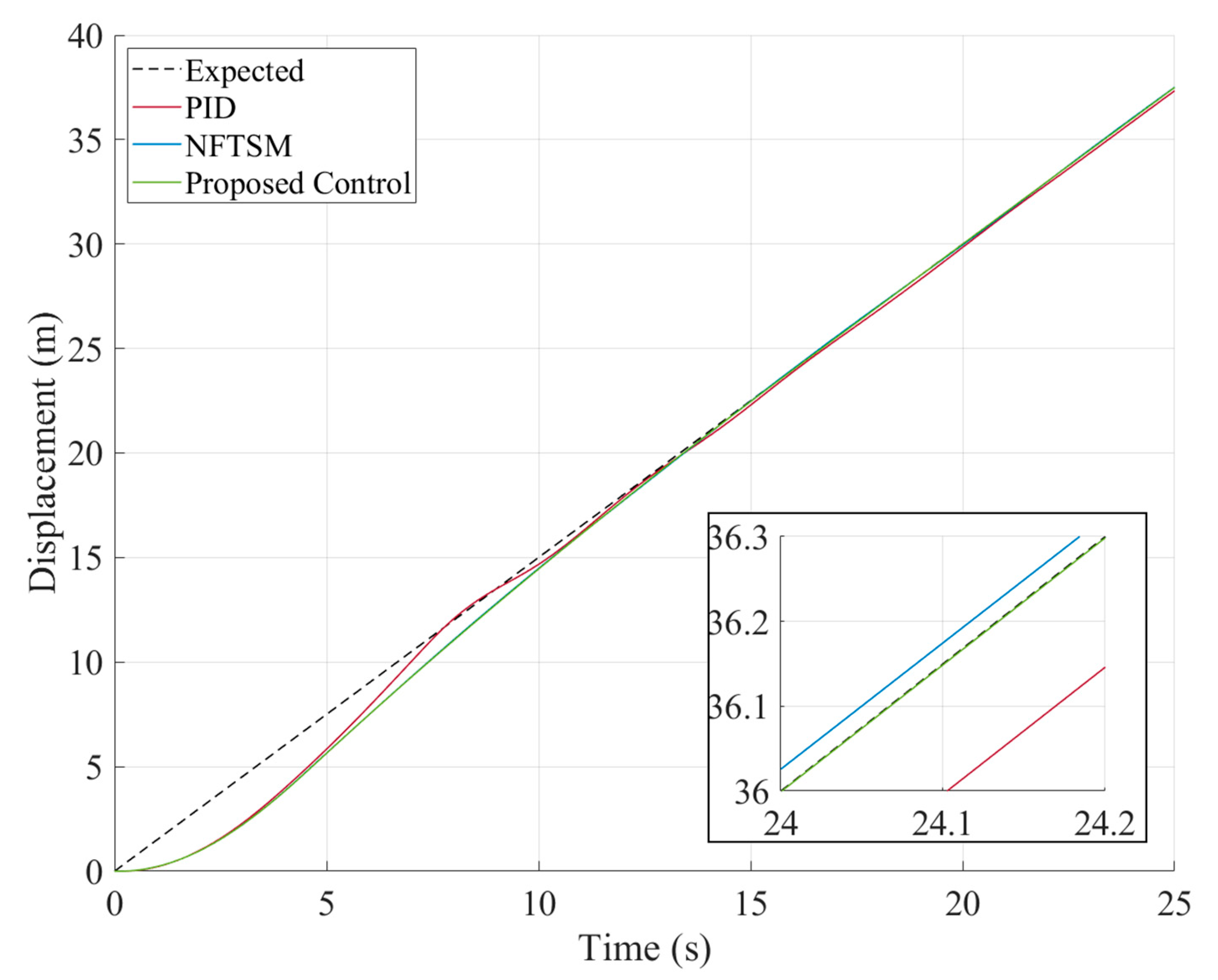
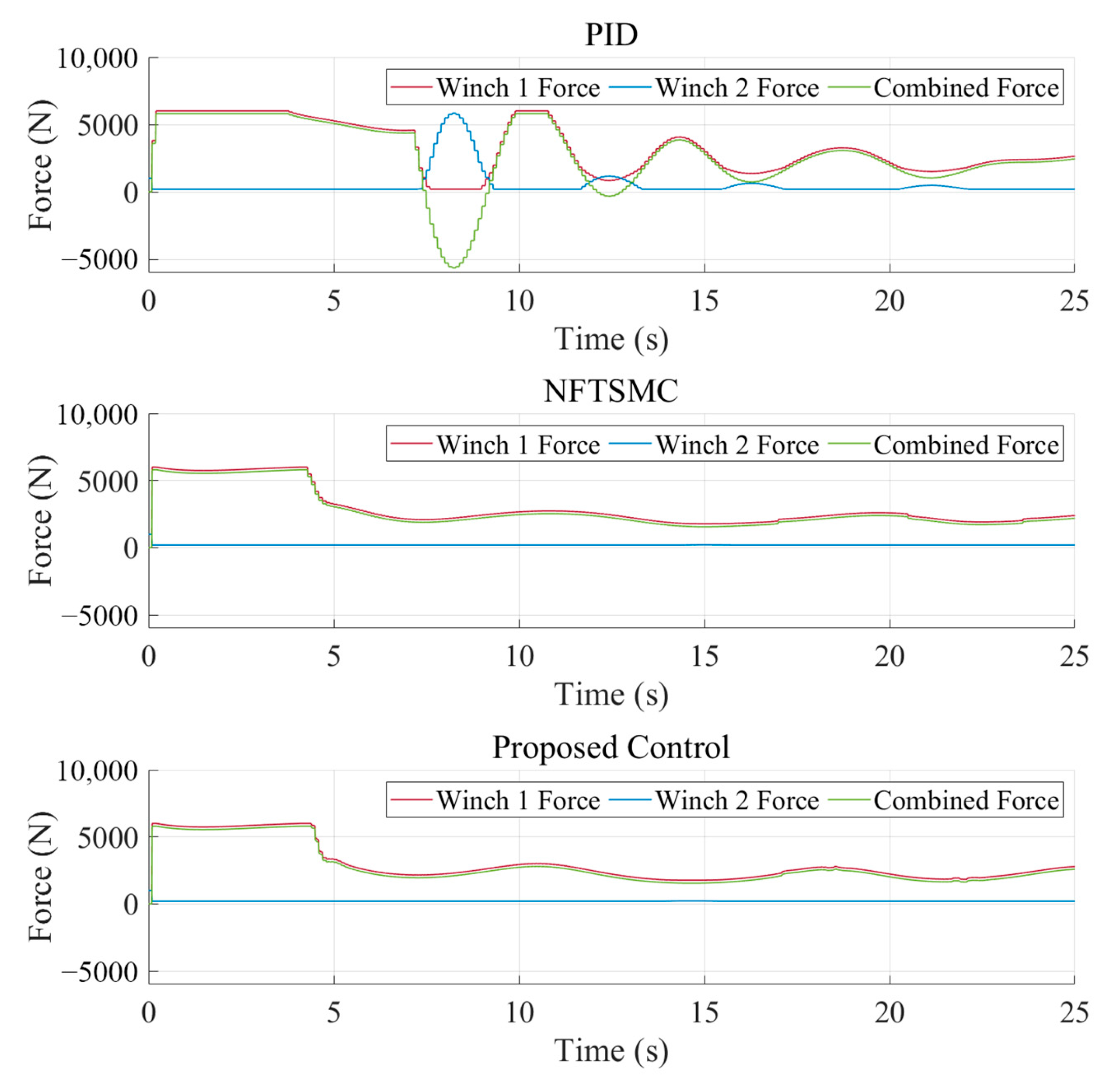
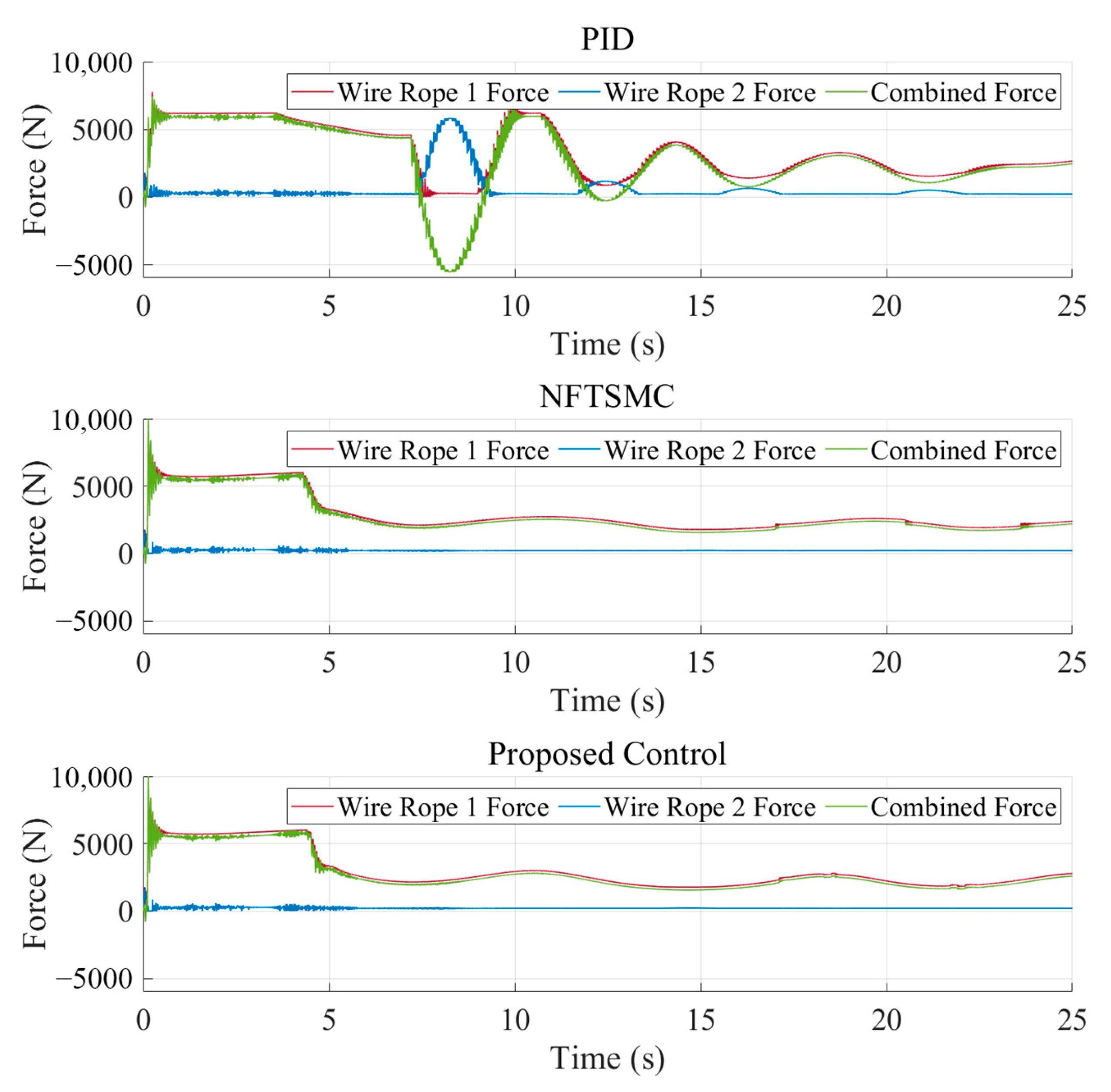
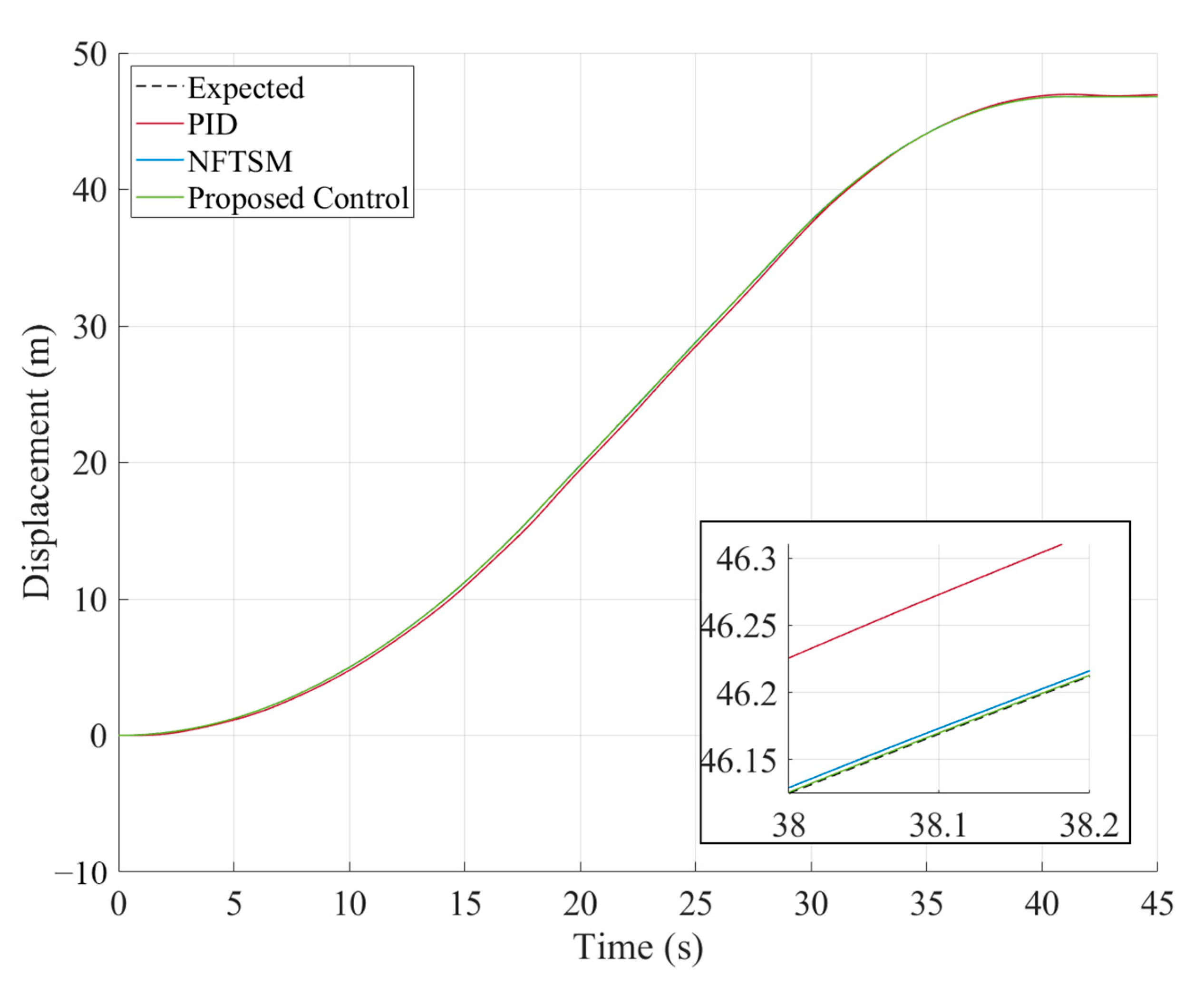
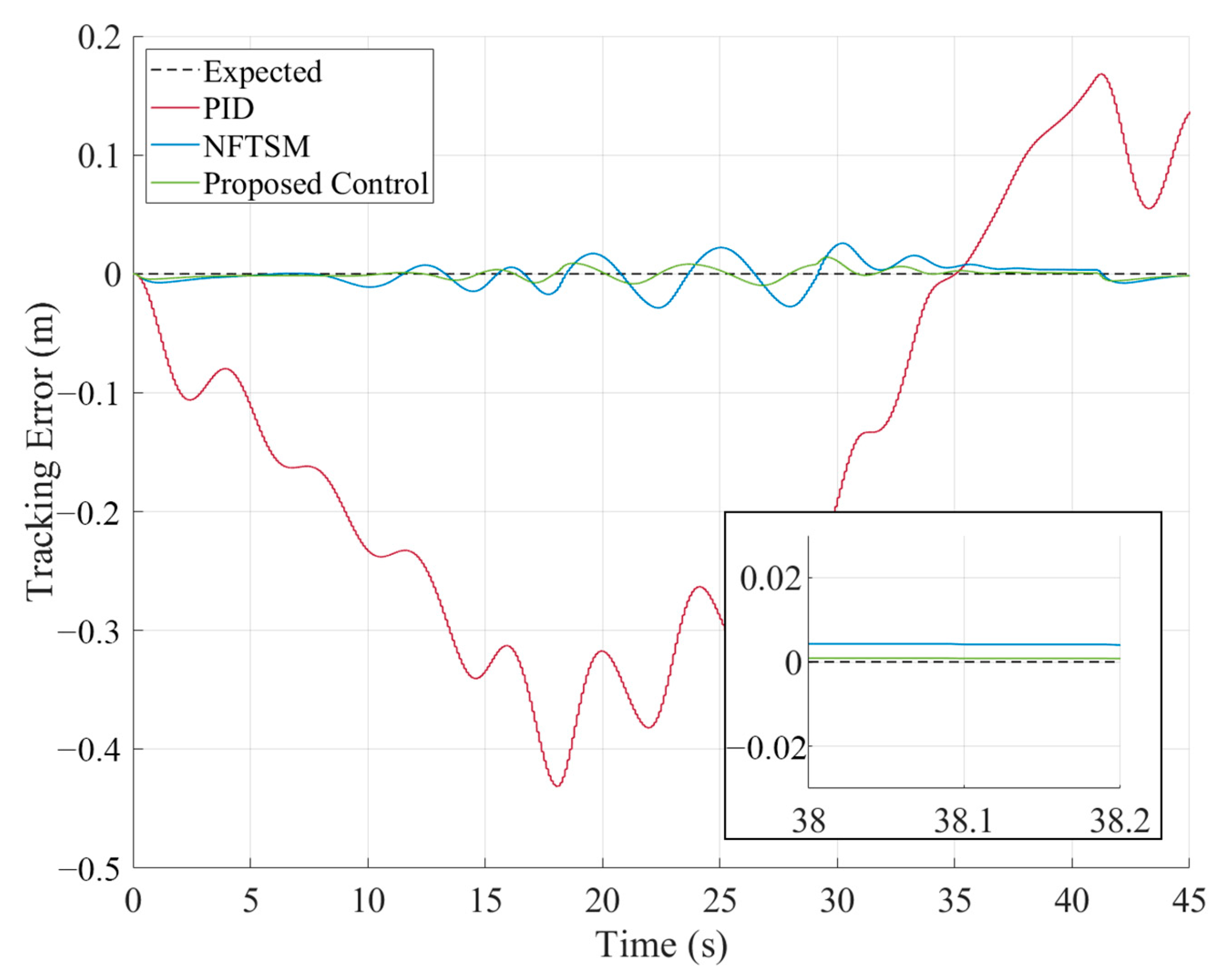
4.2. Trajectory Tracking Without Disturbances
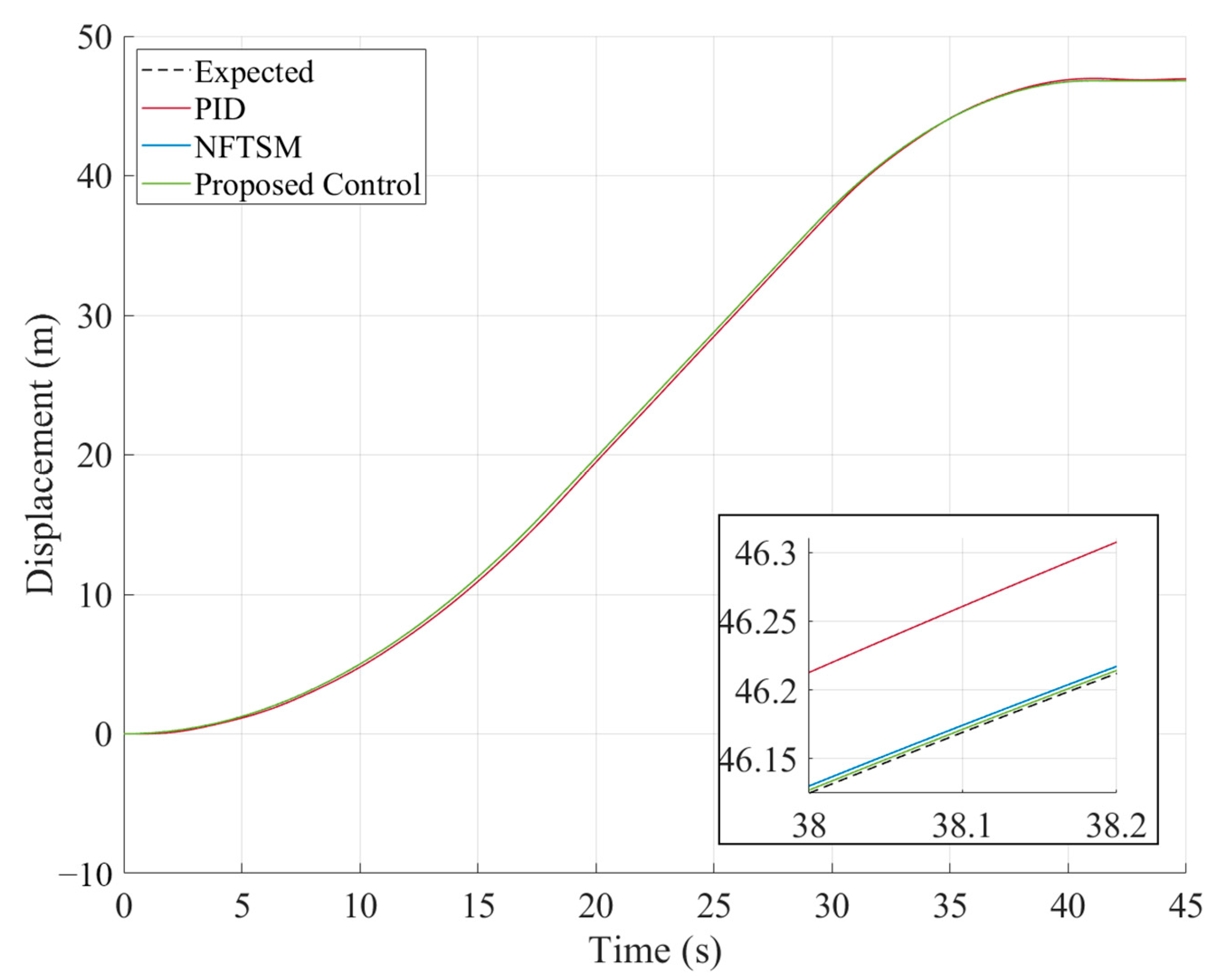
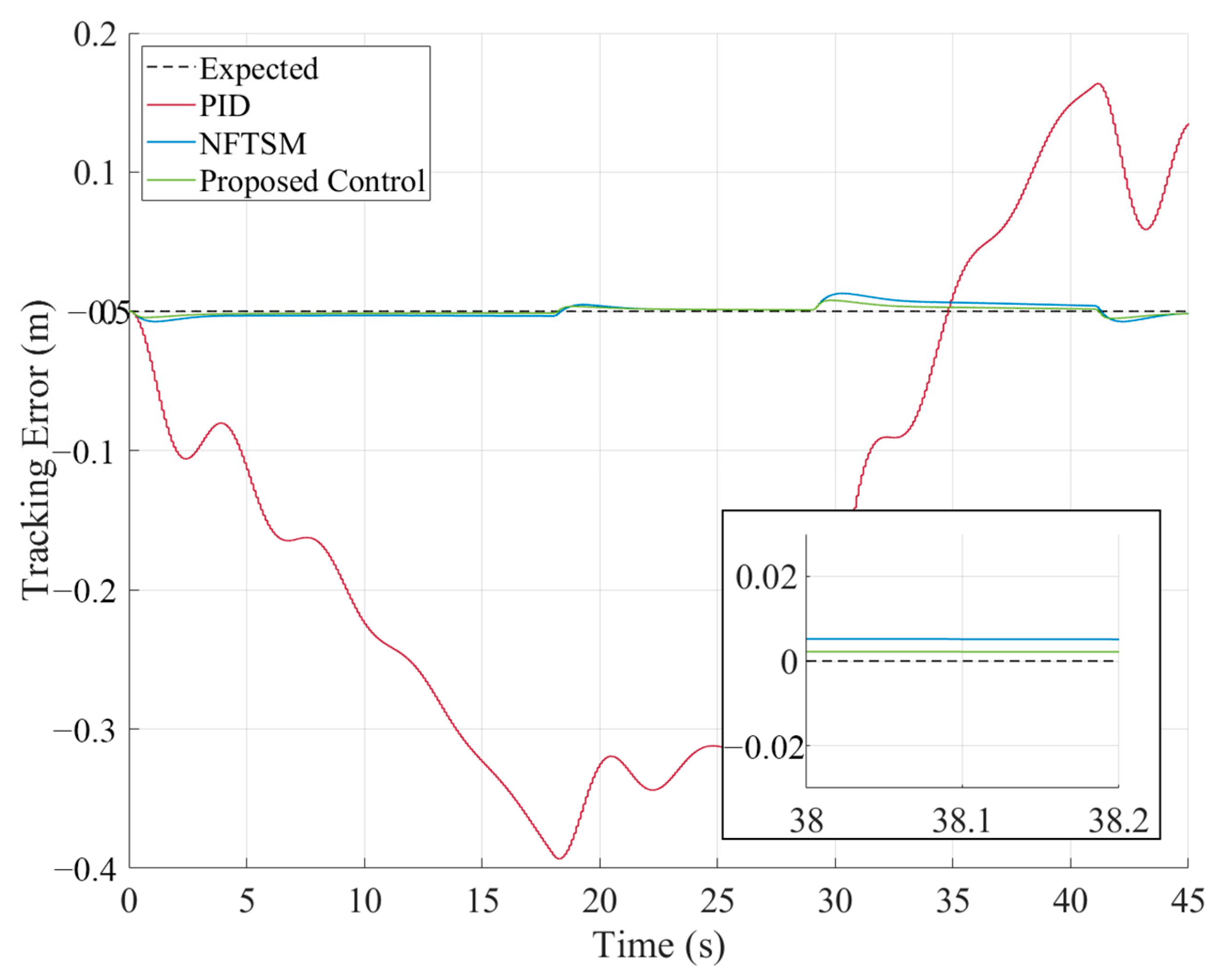
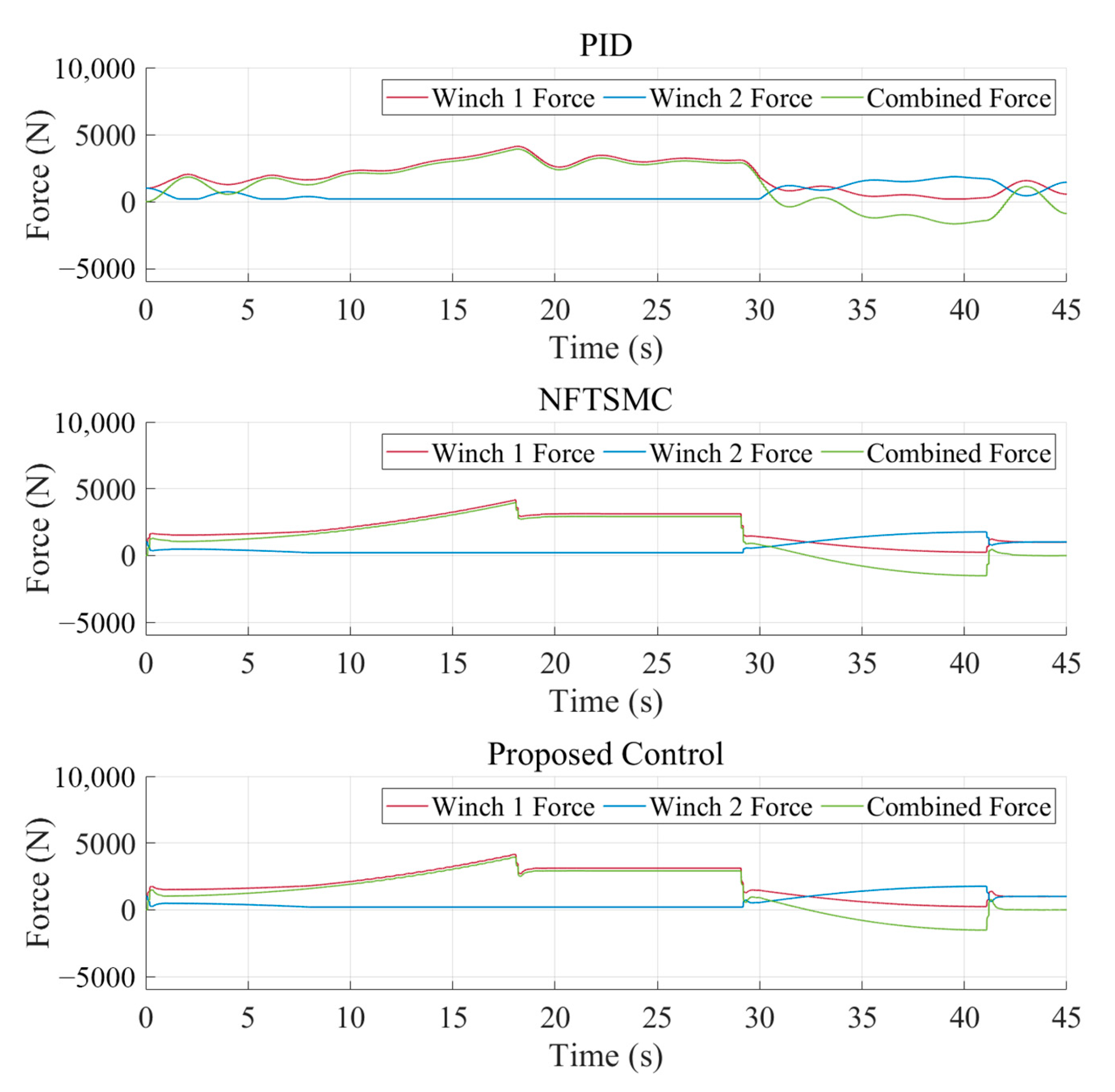
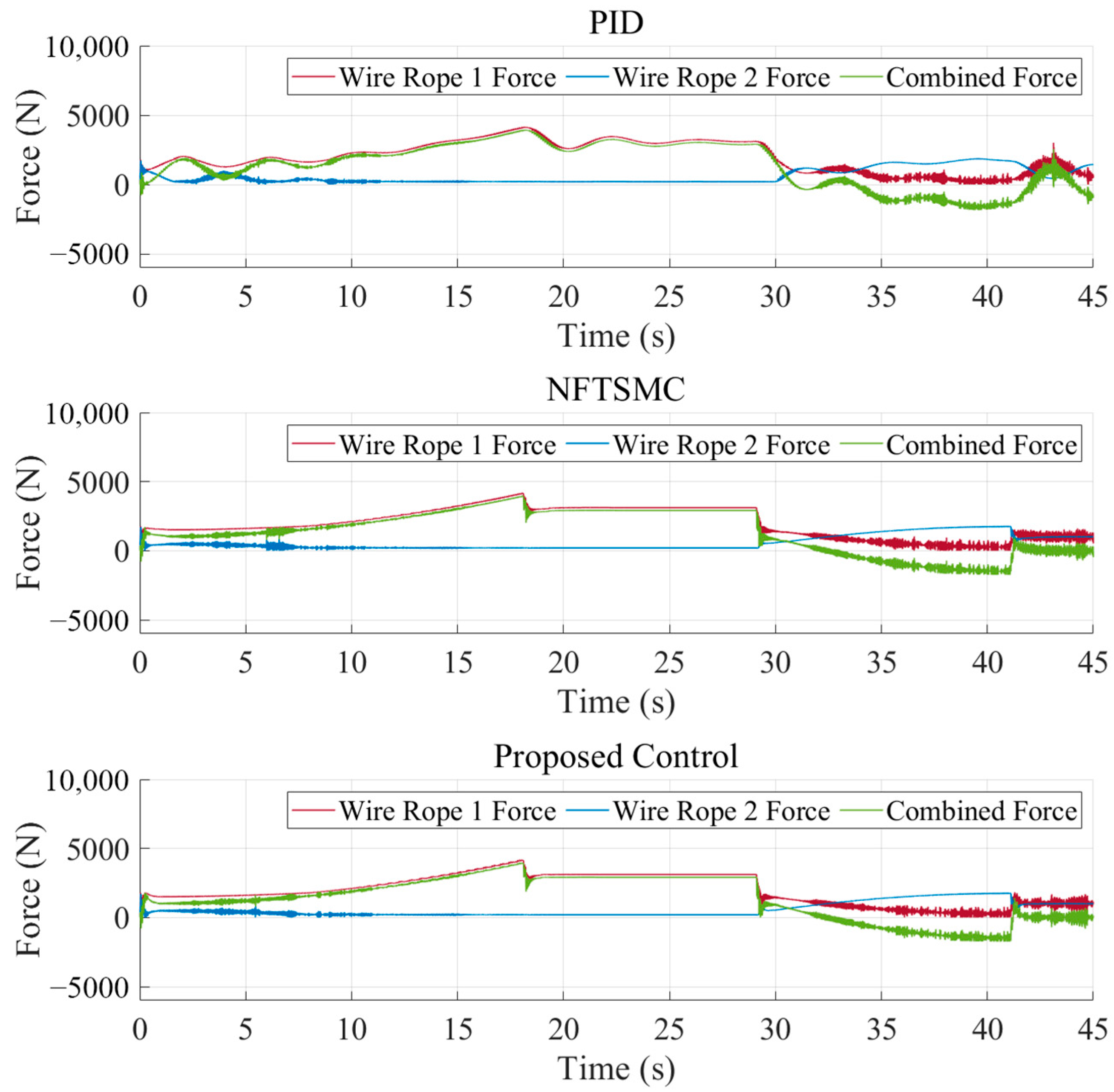
4.3. Trajectory Tracking Under Complex Time-Varying Disturbances
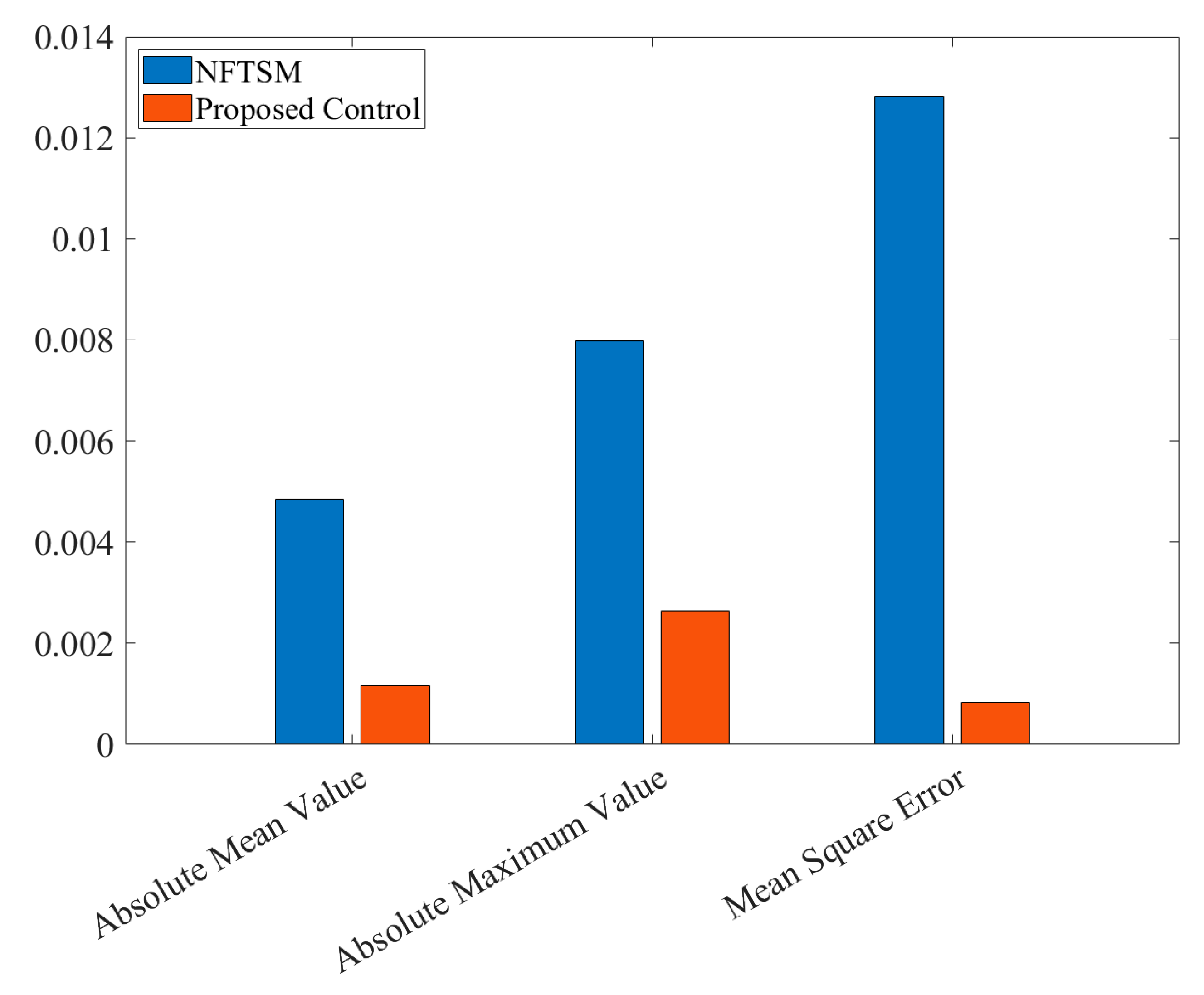
4.4. Discussion of Simulation Results
5. Conclusions
- (1)
- A coupled dynamic model incorporating the underwater vehicle, winches, and steel wire ropes were established. This model explicitly accounts for the nonlinear hydrodynamic disturbances acting on the underwater vehicle and the nonlinear dynamic characteristics of the wire ropes.
- (2)
- A differential tension coordinated control strategy for dual winches was proposed. This strategy dynamically regulates the outputs of dual winches to ensure the precise generation of the driving forces required for vehicle motion while simultaneously avoiding tension chattering in the wire ropes and actuator saturation.
- (3)
- A nonsingular fast-terminal sliding-mode control method integrated with a fuzzy adaptive nonlinear state observer and an input-saturation-compensated auxiliary dynamic system was implemented. This approach enables the underwater vehicle to achieve rapid convergence to reference trajectories and maintain accurate trajectory tracking under nonlinear time-varying disturbances.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- You, S.S.; Lim, T.W.; Kim, J.Y.; Choi, H.S. Dynamics and Robust Control of Underwater Vehicles for Depth Trajectory Following. Proc. Inst. Mech. Eng. 2013, 227, 107–113. [Google Scholar] [CrossRef]
- Koren, Y. Cross-Coupled Biaxial Computer Control for Manufacturing Systems. J. Dyn. Syst. Meas. Control 1980, 102, 265–272. [Google Scholar] [CrossRef]
- Sun, C.; Dong, X.; Li, J. Cross-Coupled Sliding Mode Synchronous Control for a Double Lifting Point Hydraulic Hoist. Sensors 2023, 23, 9387. [Google Scholar] [CrossRef] [PubMed]
- Mu, Y.; Qi, L.; Sun, M.; Han, W. An Improved Deviation Coupling Control Method for Speed Synchronization of Multi-Motor Systems. Appl. Sci. 2024, 14, 5300. [Google Scholar] [CrossRef]
- Zhou, Z.; Geng, P.; Cao, W.; Xu, X. Research on Speed Cooperative Control Strategy for Rudderless Dual-PMSM Propulsion Ships. J. Mar. Sci. Eng. 2024, 12, 266. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D.; Yan, L. High-Accuracy Tracking Control of Hydraulic Rotary Actuators with Modeling Uncertainties. IEEE/AsmE Trans. Mechatron. 2014, 19, 633–641. [Google Scholar] [CrossRef]
- Sha, S.; Wang, N.; Ma, S.; Yu, B.; Li, C.; Jiang, L.; Liu, G.; Qin, Z.; Zhao, R. Research on force-position decoupling control technology of bonnet polishing of robotic arm. Precis. Eng. 2025, 94, 315–329. [Google Scholar] [CrossRef]
- Mitsantisuk, C.; Katsura, S.; Ohishi, K. Force Control of Human–Robot Interaction Using Twin Direct-Drive Motor System Based on Modal Space Design. IEEE Trans. Ind. Electron. 2010, 57, 1383–1392. [Google Scholar] [CrossRef]
- Mitsantisuk, C.; Ohishi, K.; Katsura, S. Control of Interaction Force of Twin Direct-Drive Motor System Using Variable Wire Rope Tension with Multisensor Integration. IEEE Trans. Ind. Electron. 2011, 59, 498–510. [Google Scholar] [CrossRef]
- Madani, M.; Moallem, M. Hybrid Position/Force Control of a Flexible Parallel Manipulator. J. Frankl. Inst. 2011, 348, 999–1012. [Google Scholar] [CrossRef]
- Yin, X.; She, J.; Wu, M.; Sato, D.; Ohnishi, K. Disturbance rejection using SMC-based-equivalent-input-disturbance approach. Appl. Math. Comput. 2022, 418, 126839. [Google Scholar] [CrossRef]
- Bharti, R.R.; Dwivedy, S.K. Adaptive nonsingular fast terminal sliding mode control for the tracking control of underactuated autonomous underwater vehicles. J. Syst. Control. Eng. 2024, 238, 929–942. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Xie, L.; Wang, S.; Wang, Z.; Ma, W. Research on the New Hydrostatic Transmission System of Wheel Loaders Based on Fuzzy Sliding Mode Control. Energies 2024, 17, 565. [Google Scholar] [CrossRef]
- Kong, L.; Reis, J.; He, W.; Silvestre, C. Experimental Validation of a Robust Prescribed Performance Nonlinear Controller for an Unmanned Aerial Vehicle with Unknown Mass. IEEE/ASME Trans. Mechatron. 2024, 29, 301–312. [Google Scholar] [CrossRef]
- Ho, T.H.; Ahn, K. Speed Control of a Hydraulic Pressure Coupling Drive Using an Adaptive Fuzzy Sliding-Mode Control. IEEE/ASME Trans. Mechatron. 2012, 17, 976–986. [Google Scholar] [CrossRef]
- Tran, D.T.; Truong, H.V.A.; Ahn, K.K. Adaptive Nonsingular Fast Terminal Sliding mode Control of Robotic Manipulator Based Neural Network Approach. Int. J. Precis. Eng. Manuf. 2021, 22, 417–429. [Google Scholar] [CrossRef]
- Lee, J.; Jin, M.; Ahn, K.K. Precise tracking control of shape memory alloy actuator systems using hyperbolic tangential sliding mode control with time delay estimation. Mechatronics 2013, 23, 310–317. [Google Scholar] [CrossRef]
- Lu, M.; Yang, W.; Xiong, Z.; Liao, F.; Wu, S.; Su, Y.; Wu, W. RBFNN-Based Adaptive Fixed-Time Sliding Mode Tracking Control for Coaxial Hybrid Aerial-Underwater Vehicles Under Multivariant Ocean Disturbances. Drones 2024, 8, 745. [Google Scholar] [CrossRef]
- Pang, H.; Liu, M.; Hu, C.; Zhang, F. Adaptive sliding mode attitude control of two-wheel mobile robot with an integrated learning-based RBFNN approach. Neural Comput. Appl. 2022, 34, 14959–14969. [Google Scholar] [CrossRef]
- Jing, W.; Li, M.; Chen, Y.; Chen, Z. Fixed-time control of multi-motor nonlinear systems via adaptive neural network dual sliding mode. Inf. Sci. 2025, 708, 122061. [Google Scholar] [CrossRef]
- Wang, Y.; Shen, Z.; Wang, Q.; Yu, H. Predictor-based practical fixed-time adaptive sliding mode formation control of a time-varying delayed uncertain fully-actuated surface vessel using RBFNN. ISA Trans. 2022, 125, 166–178. [Google Scholar] [CrossRef] [PubMed]
- Man, Z.H.; Paplinski, A.P.; Wu, H.R. A robust MIMO terminal sliding mode control scheme for rigid robotic manipulators. IEEE Trans. Autom. Control 1994, 39, 2464–2469. [Google Scholar]
- Feng, Y.; Yu, X.H.; Man, Z.H. Non-Singular Terminal Sliding Mode Control of Rigid Manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Rouhani, E.; Erfanian, A. A Finite-time Adaptive Fuzzy Terminal Sliding Mode Control for Uncertain Nonlinear Systems. Int. J. Control Autom. Syst. 2018, 16, 1938–1950. [Google Scholar] [CrossRef]
- Dinh, T.X.; Ahn, K.K. Radial basis function neural network based adaptive fast nonsingular terminal sliding mode controller for piezo positioning stage. Int. J. Control Autom. Syst. 2017, 15, 2892–2905. [Google Scholar] [CrossRef]
- Martinez-Perez, V.S.; Sanchez-Calvo, A.E.; Gonzalez-Garcia, A.; Castañeda, H. Adaptive Non-Singular Terminal Sliding Mode Tracking Control of an UUV Against Disturbances. IFAC Pap. 2022, 55, 13–18. [Google Scholar] [CrossRef]
- Fujimoto, Y.; Kawamura, A. Robust Servo-system Based on Two-degree-of-freedom Control with Sliding Mode. IEEE Trans. Ind. Electron. 1995, 42, 272–280. [Google Scholar] [CrossRef]
- Li, W.H.; Wu, C.C.; Lin, S.Y.; Li, G.; Zhang, P. Active heave compensation of marine winch based on hybrid neural network prediction and sliding mode controller with a high-gain observer. Ocean Eng. 2025, 322, 120448. [Google Scholar] [CrossRef]
- Liu, S.; Liu, Y.; Wang, N. Nonlinear disturbance observer-based backstepping finite-time sliding mode tracking control of underwater vehicles with system uncertainties and external disturbances. Nonlinear Dyn. 2017, 88, 465–476. [Google Scholar] [CrossRef]
- Sedghi, F.; Arefi, M.M.; Abooee, A.; Kaynak, O. Adaptive Robust Finite-Time Nonlinear Control of a Typical Autonomous Underwater Vehicle with Saturated Inputs and Uncertainties. IEEE/ASME Trans. Mechatron. 2021, 26, 2517–2527. [Google Scholar] [CrossRef]
- Lei, Q.; Zhang, W.D. Adaptive Second-Order Fast Nonsingular Terminal Sliding Mode Tracking Control for Fully Actuated Autonomous Underwater Vehicles. IEEE J. Ocean. Eng. 2019, 44, 363–385. [Google Scholar]
- Ali, N.; Tawiah, I.; Zhang, W. Finite-time extended state observer based nonsingular fast terminal sliding mode control of autonomous underwater vehicles. Ocean Eng. 2020, 218, 108179. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition | Value | Unit |
|---|---|---|---|
| M | Mass of the vehicle | kg | |
| Vehicle drag coefficient | 0.3 | ||
| D | Diameter of the vehicle | 2 | m |
| H | Height of the underwater vehicle | 3 | m |
| Water density | 1000 | ||
| Average pressure exerted by the vehicle on the track | N | ||
| Total length of the track. | 50 | m | |
| J | Moment of inertia of the winch | 1.8 | |
| R | Radius of the winch drum | 0.8 | m |
| I | Gear reduction ratio of the winch | 36 | / |
| Upper force limit of the winch | N | ||
| Lower force limit of the winch | N | ||
| A | Cross-sectional area of the steel wire rope | ||
| E | Equivalent axial elastic modulus of the steel wire rope | 80 | GPa |
| c | Equivalent damping coefficient of the steel wire rope | 1000 |
| Method | Description |
|---|---|
| FANDO-NFTSM | Proposed control |
| NFTSM | Nonsingular fast-terminal sliding-mode control without an observer |
| PID | PID cascade control |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, H.; Li, X.; Xu, K.; Song, D.; Xia, Y.; Xu, G. Motion Control of a Flexible-Towed Underwater Vehicle Based on Dual-Winch Differential Tension Coordination Control. J. Mar. Sci. Eng. 2025, 13, 1120. https://doi.org/10.3390/jmse13061120
Wu H, Li X, Xu K, Song D, Xia Y, Xu G. Motion Control of a Flexible-Towed Underwater Vehicle Based on Dual-Winch Differential Tension Coordination Control. Journal of Marine Science and Engineering. 2025; 13(6):1120. https://doi.org/10.3390/jmse13061120
Chicago/Turabian StyleWu, Hongming, Xiong Li, Kan Xu, Dong Song, Yingkai Xia, and Guohua Xu. 2025. "Motion Control of a Flexible-Towed Underwater Vehicle Based on Dual-Winch Differential Tension Coordination Control" Journal of Marine Science and Engineering 13, no. 6: 1120. https://doi.org/10.3390/jmse13061120
APA StyleWu, H., Li, X., Xu, K., Song, D., Xia, Y., & Xu, G. (2025). Motion Control of a Flexible-Towed Underwater Vehicle Based on Dual-Winch Differential Tension Coordination Control. Journal of Marine Science and Engineering, 13(6), 1120. https://doi.org/10.3390/jmse13061120