2.1. Design of a Bionic Greenfin Fish Robot
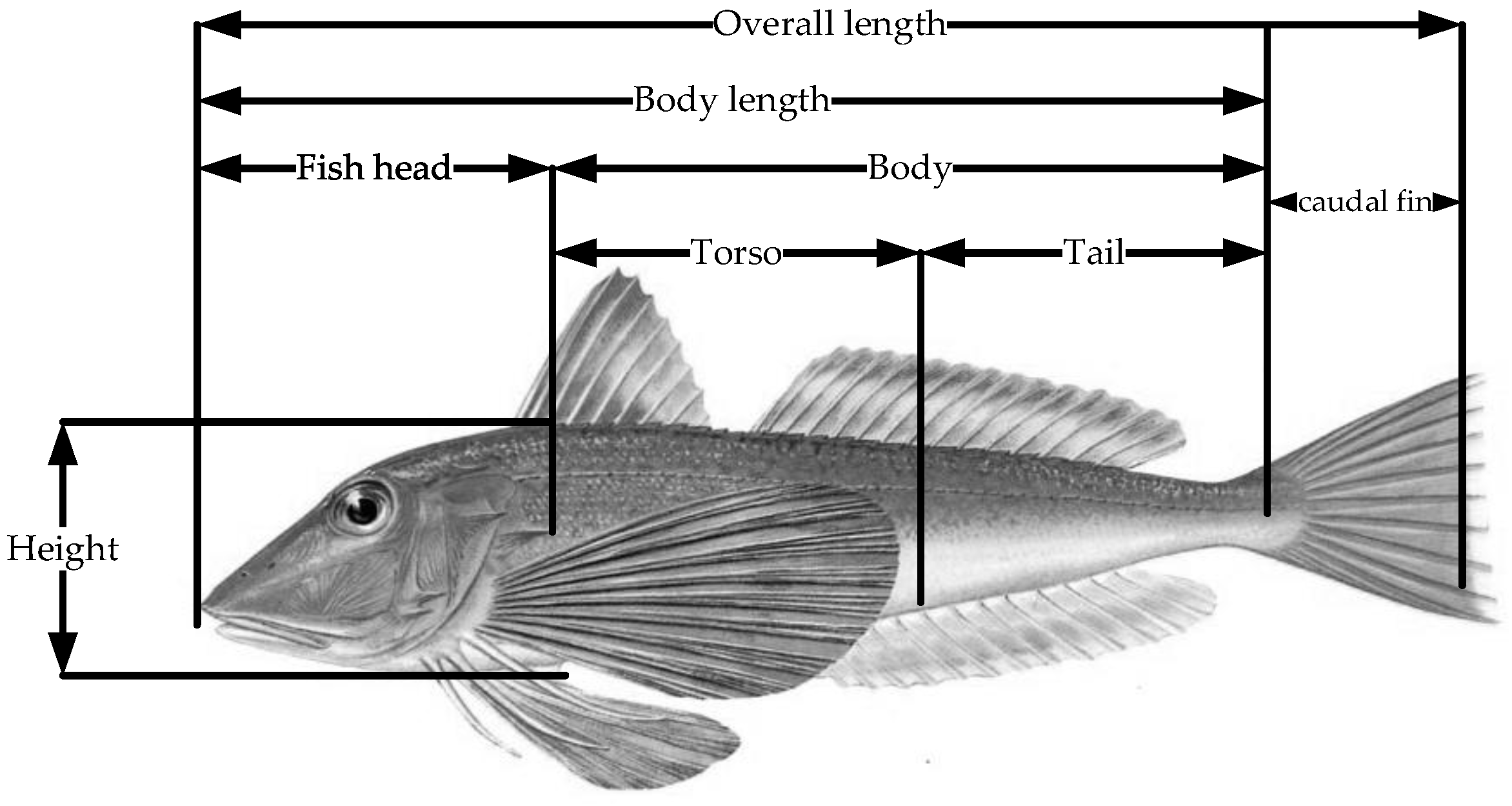
The greenfin fish, Pomfretidae, genus Greenfin, has a long, slightly laterally flattened body with a thick anterior region and a tapering posterior segment. The pectoral fins are long and broad, measuring 4.6–4.7-times the body height, 2.9–3.8-times the head length, and 5.4–5.5-times the tail length. When fully inflated, the pectoral fins measure around 1.8–1.9-times the body width and 0.4–0.5-times the body length. The bodily parameters are simplified equally based on the idea that functional mimicry is fundamental and physical mimicry is secondary. Greenfin fish move underwater primarily by water-striking from the back half of the fish with the caudal fin and bird-like water-skimming propulsion from the pectoral fins. The caudal fin propulsion mode of the bionic greenfin robot is similar to the body/caudal fin propulsion mode of conventional bionic fish robots. The pectoral fin’s water-skimming propulsion mode is identical to the flight-fluttering motion of birds such as hummingbirds, in which the thrust and lift are obtained by adjusting the angle of attack and skimming angle in real time to interact with the water current. The bionic greenfin fish robot designed in this paper has a pair of large pectoral fins, which lays the foundation for the pectoral fin water-skimming propulsion, and the efficiency of the propulsion mode of the tail fins swinging from side to side is also lower because of the larger pectoral fins, so the bionic greenfin fish robot studied in this research is mainly propelled by the pectoral fins, and the tail fins are responsible for realizing the steering and emergency stop function.
1. Pectoral fin propulsion mechanism: Generally, the sinusoidal signal can maintain a smooth transition in the switching of motion modes, and basically, the sinusoidal motion mode will be used for control when building the kinematic model of the pectoral fin. The kinematic modes of the pectoral fins are classified into three types: single-degree-of-freedom flutter motion, double-degree-of-freedom composite motion rotating around two axes, and three-degree-of-freedom composite motion rotating around three axes. The three-degree-of-freedom composite motions include the following: rocking wing motion around the y-axis, flutter motion around the x-axis, and forward and backward flutter motion around the z-axis. It can be expressed as
In the above equation,
, , —Euler angles of pectoral fin anterior-posterior flutter, rocker flutter, and up-and-down flutter;
, , —Mean values of pectoral fin anterior-posterior flutter, rocker flutter, and up-and-down flutter;
, , —Amplitudes of pectoral fin anterior and posterior flutter, rocker flutter, and up-and-down flutter;
, —Phase difference;
—Angular velocity of motion.
The bionic fish robot uses pectoral fin propulsion, which is similar to that of birds. Just as hummingbirds and other birds flap their wings to fly, the pectoral fins of fish can realize a bird-like water-skimming motion by changing the oscillation angle of the pectoral fins and the angle of attack in real time.
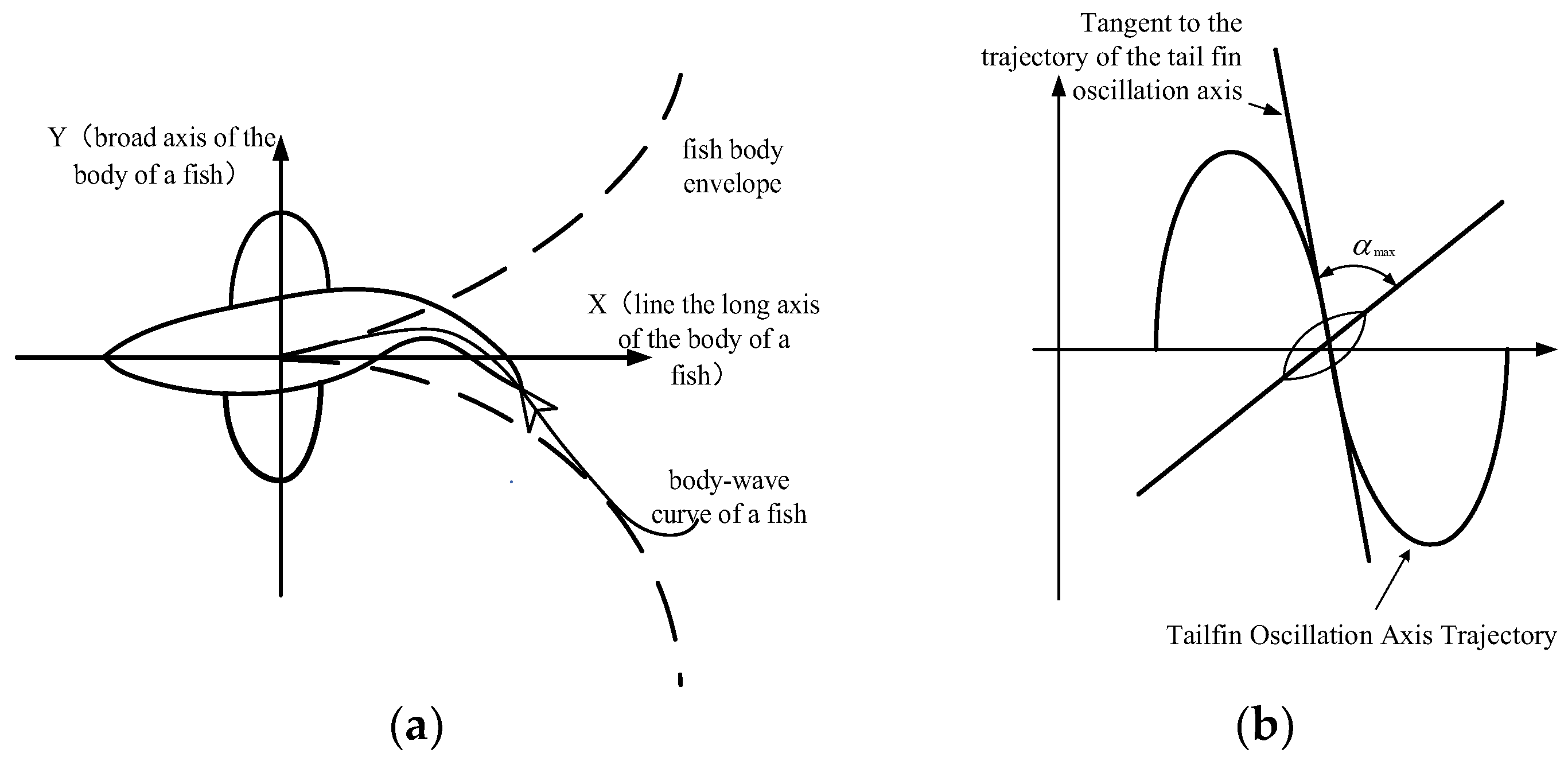
2. The caudal fin propulsion mechanism: The motion of a robotic fish mimicking a trevally plus crescent-shaped caudal fin pattern in the two-dimensional steady-state case can be decomposed into two parts: the fluctuation of the body of the fish and the composite motion of the tail fin driven by the body of the fish in an advection and its own oscillation. The specific curves and angles are shown in
Figure 1.
The fish body wave equation can be viewed as a coupling of the fish wave amplitude envelope and a sinusoidal curve.
In the formula:
—Transverse displacement of the fish body (in the direction of the wide axis of the fish body);
—Axial position change in the fish body (direction of the long axis of the fish body);
—Coefficients of the primary term of the wave amplitude envelope equation;
—The coefficients of the quadratic terms of the wave amplitude envelope equation;
—The wavelength of the fish body wave, ;
—The frequency of the fish body wave, .
where the values of and are related to the swimming posture of the fish and the length dimension of the fish’s body, as well as the swimming speed of the fish. Their values determine the swing of the bionic fish’s body. The fish body wave equation determines the bionic fish’s mobility. The portion of the robotic body oscillations of fish bits usually reproduces the curve of the first 1/3 or so of the wavelength of the complete fish body wave. The motion of the caudal fin can be decomposed into an oscillation of the caudal fin and a flat motion of the caudal fin derived from the fish’s body wave drive. These two motions are not synchronized but have a certain phase difference. It has been shown that the propulsive efficiency is highest when the phase difference is at 90°.
The maximum strike angle is another major factor affecting the propulsive efficiency of the caudal fin. The strike angle α is the angle between the tangent of the trajectory line of the caudal fin oscillation axis and the centerline of the caudal fin at a certain point. When the maximum strike angle is 0°, the centerline of the caudal fin at a certain point coincides with the tangent to the trajectory line of the tail fin oscillation axis at that point. In this case, no propulsive force is generated by the oscillation of the caudal fin. Experience has shown that the propulsive force generated by the caudal fin gradually increases in the interval from 0° to 25° for the maximum water strike angle. As it increases to 30°, the caudal fin produces almost no propulsive force relative to the fish’s body, and beyond 40°, the caudal fin oscillates to impede the propulsion of the fish’s body.
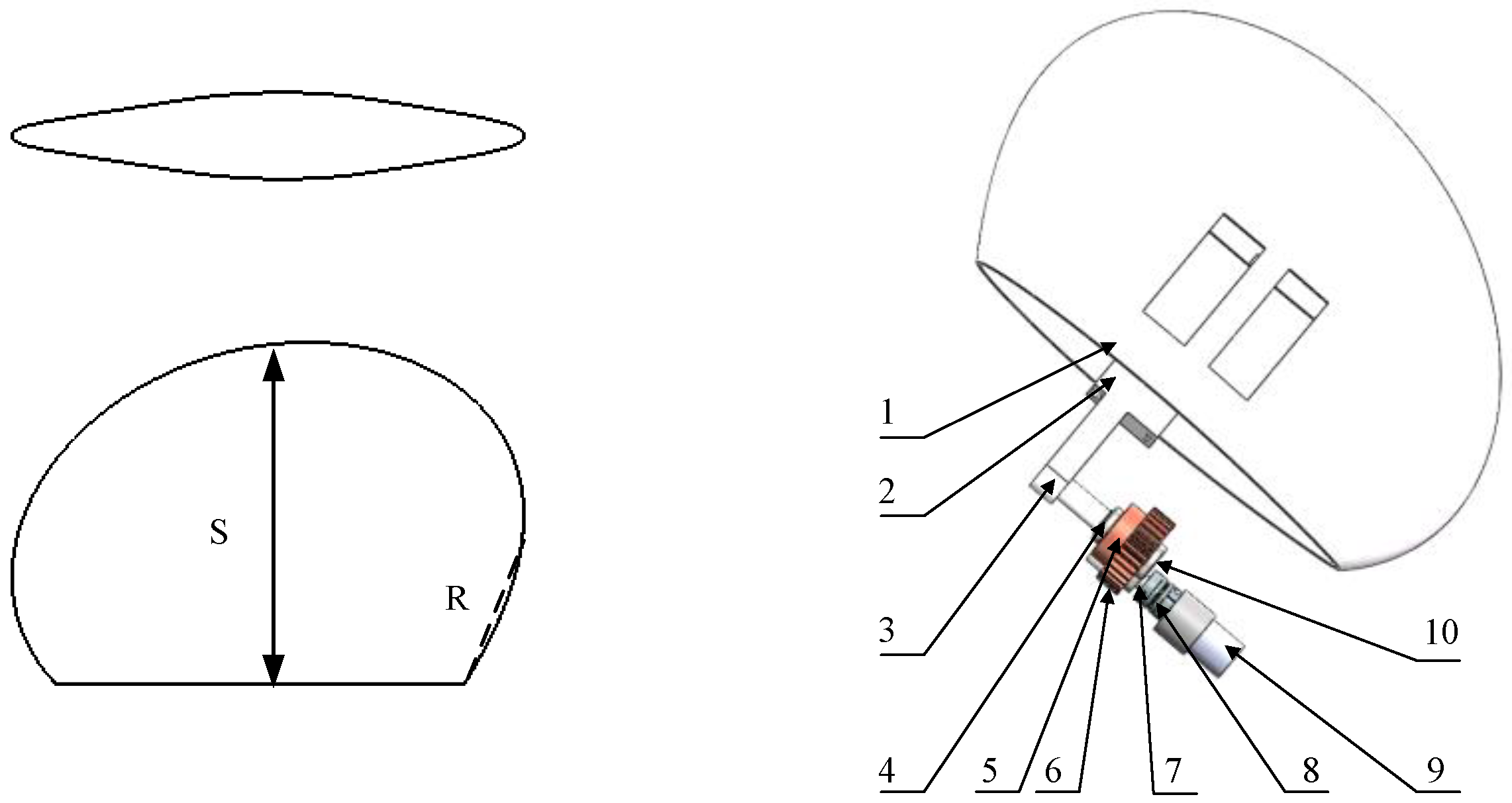
When combined with the morphological characteristics of the greenfin fish, the larger pectoral fins provide a guarantee for the pectoral fin propulsion mode, but they also produce a higher traveling resistance. The tail fin propulsion mode for the bionic greenfin fish robot’s propulsion speed and propulsion efficiency is much lower than the pectoral fin propulsion mode. As a result, the bionic fish robot designed in this project is primarily based on the pectoral fin’s water-skimming propulsion mode with a higher propulsion speed, while the caudal fin is primarily responsible for steering and stopping, completing the overall design of the bionic greenfin fish robot. Based on the morphological and structural composition of the greenfin fish, the bionic greenfin fish robot as a whole can be divided into four parts: head, body, pectoral fins, and caudal fins. Based on geometric integration and accuracy, function sharing, supplier capability, similarity of design or production technology, centralized modification, suitability for diversification, standardization, and convenience of association, the corresponding module elements are divided into corresponding sections, and all possible clustering schemes are considered. The division of specific modules is shown in
Figure 2.
The bionic greenfin fish robot designed in this project is oriented to the water quality of aquaculture ponds and underwater environment monitoring. The bionic robot fish needs to be able to detect water quality and swim flexibly. The role of detecting water quality requires the fish to be able to detect acidity, alkalinity, and pollutant concentration in various water settings, which necessitates the use of a detection module as well as an information-gathering module. Flexible swimming necessitates that the robot fish accelerate, decelerate, steer, hover, and perform other behaviors, such as pleasing fish, all of which require the use of an execution module, power module, and control module.
When combined with the morphological characteristics of the greenfin fish, the larger pectoral fins provide a guarantee for the pectoral fin propulsion mode, but they also produce a higher traveling resistance. The tail fin propulsion mode for the bionic greenfin fish robot’s propulsion speed and propulsion efficiency is much lower than the pectoral fin propulsion mode. As a result, the bionic fish robot designed in this project is primarily based on the pectoral fin’s water-skimming propulsion mode with a higher propulsion speed, while the caudal fin is primarily responsible for steering and stopping, completing the overall design of the bionic greenfin fish robot. The function of the drive module is to be realized by the pectoral fins and the caudal fins, and its shape, angle, and movement mode need to be modified many times, so the drive module is put into the body of the fish, it can be used as the cabin of the motion control system, and it is convenient to centralize the modification. The motion of the greenfin fish is mainly realized by the motion of the three parts of the pectoral fin, tail, and caudal fin, and the three actuator modules of the pectoral fin, tail, and caudal fin are designed as the corresponding motion actuators according to the design task.
According to the motion control objective of the bionic fish, the hardware of the control system is designed and planned, which includes the selection of the control chip, the selection of the communication mode, the selection of the power source, and the design of the floating and sinking mechanism, etc. The overall structure of the bionic greenfin fish robot is shown in
Figure 3.
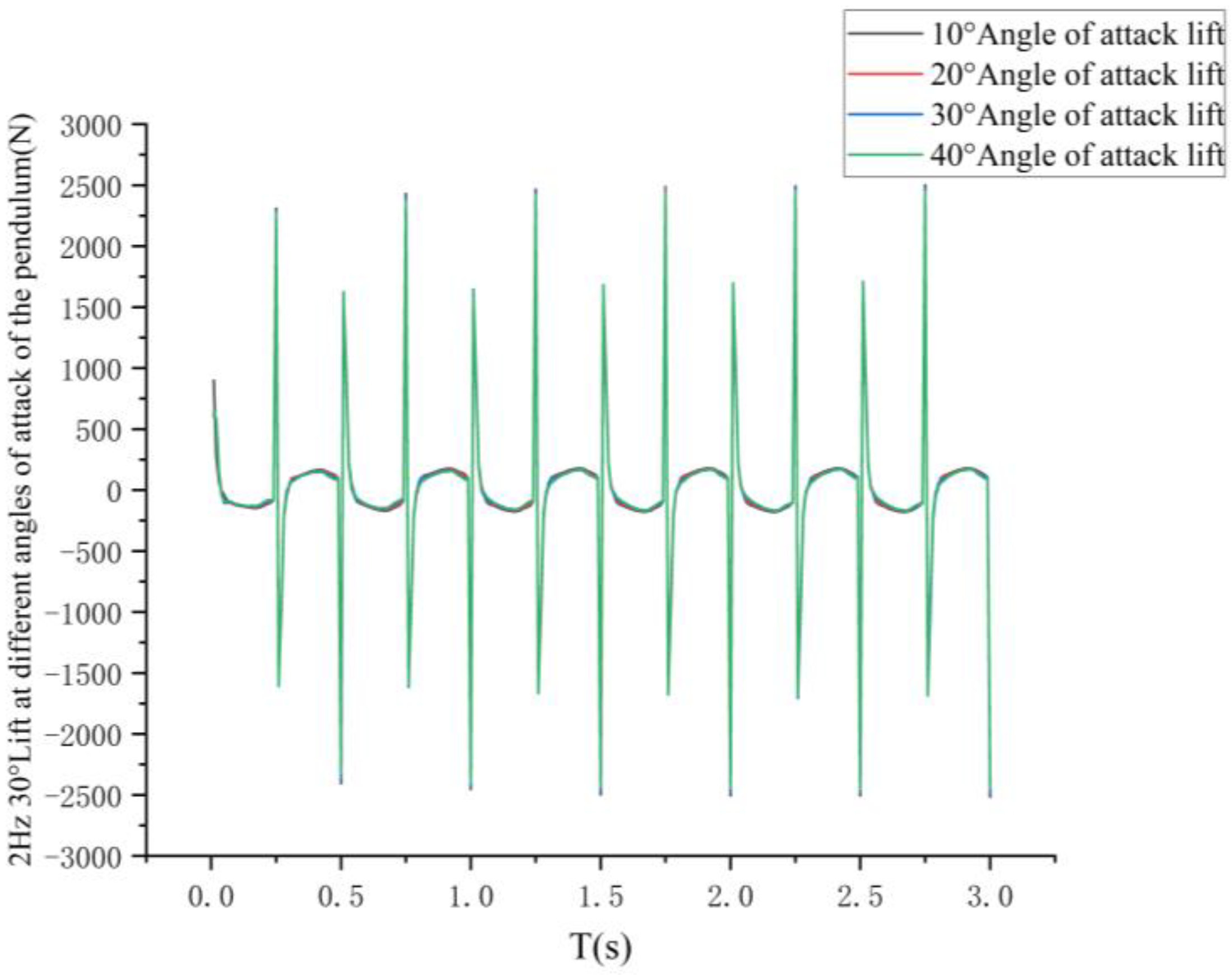
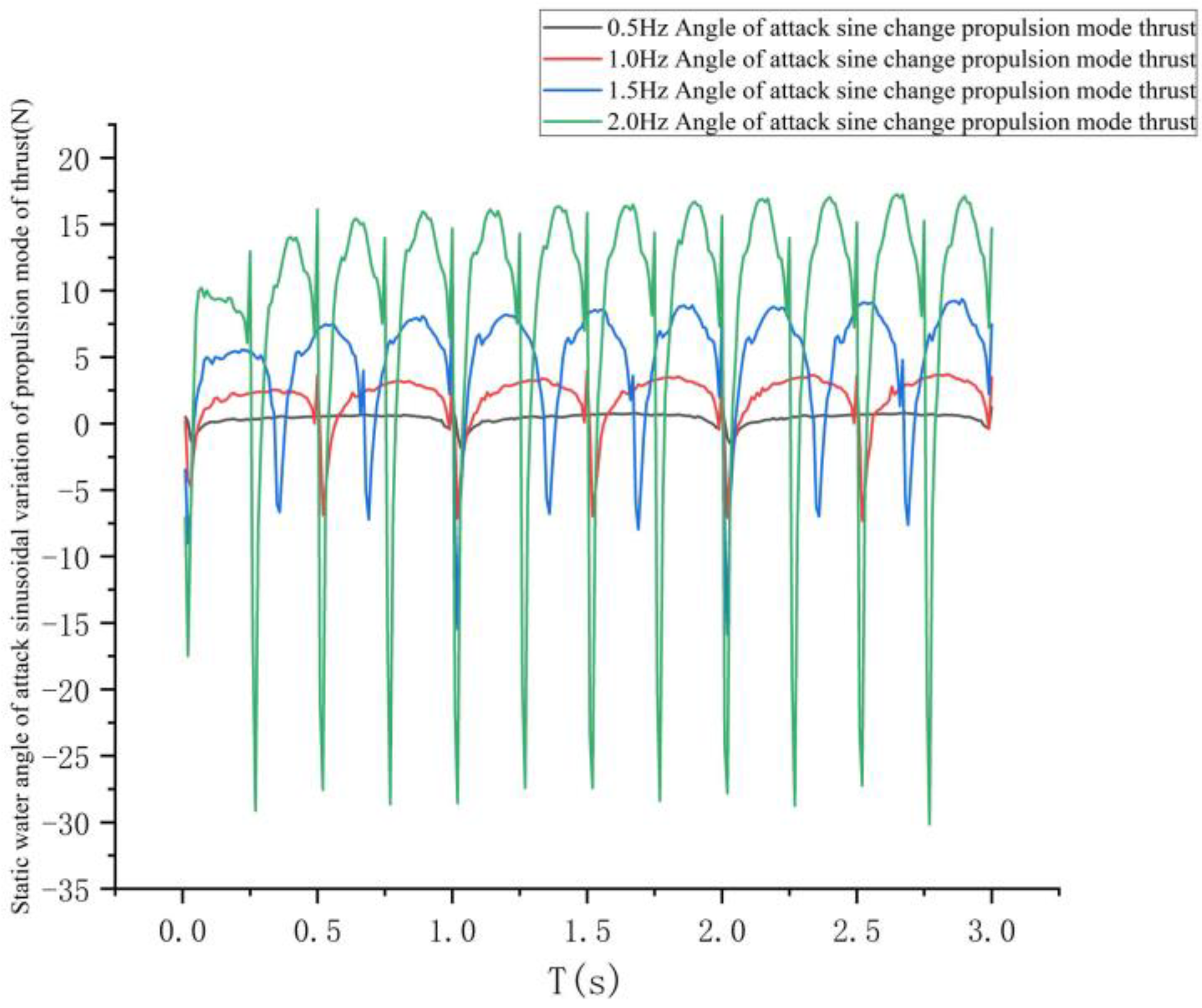
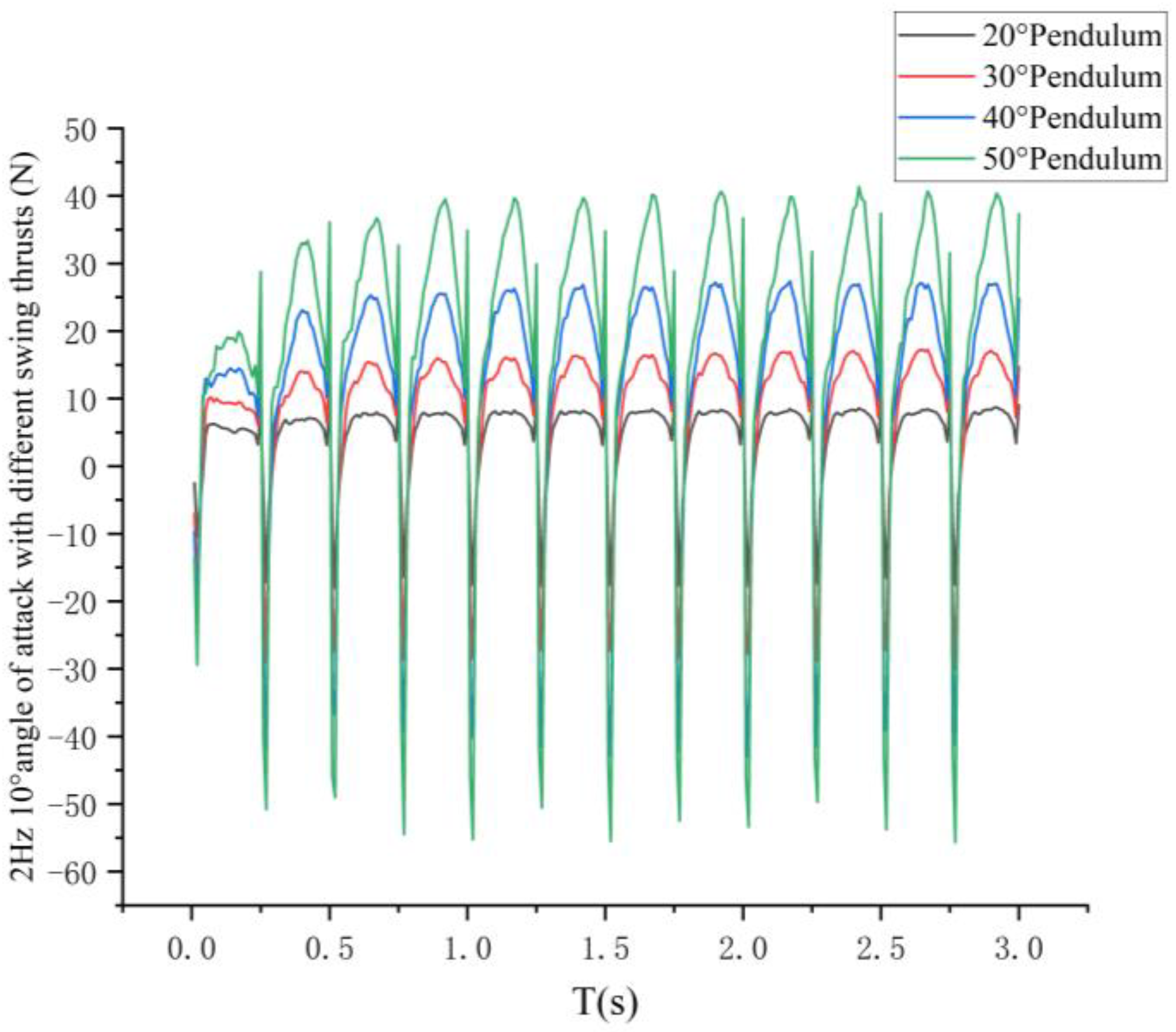
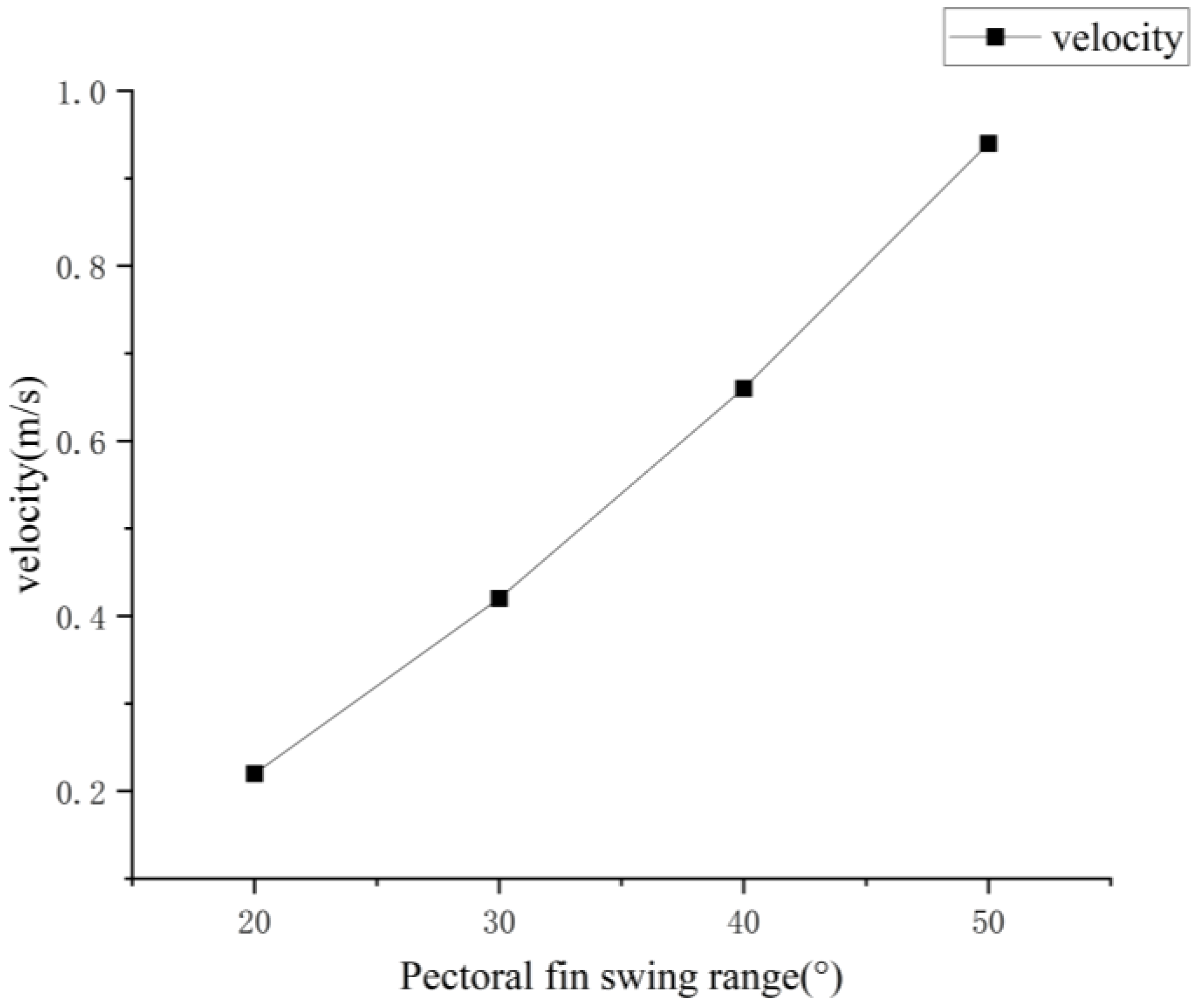
2.3. Hydrodynamic Simulation Analysis of Tail Fin Steering Emergency Stop Performance
The application scenario for this thesis uses an aquaculture pond as an example, the water of the industrialized aquaculture pond circulates, the underwater flow rate of the aquaculture pond is typically around 6–8 cm/s, and the water surface flow rate is quicker. Under comprehensive consideration, we investigate the influence of the sinusoidal variation in the angle of attack on the propulsive movement of the bionic green finfish robot, which is initiated under the incoming flow rate. The effects of thrust, lift, and propulsive velocity are examined.
The width of the fish body is determined comprehensively according to the proportion of the size parameters of the greenfin fish and the need to minimize the size of the internal space. In this paper, we take a fish body height of 200 mm, a fish body width of 172 mm, a fish body length of 920 mm, a head length of 317 mm, a tail length of 306 mm, a tail length of 170 mm, a pectoral fin width of 319 mm, and a pectoral fin length of 438 mm. The numerical simulation of this model is carried out by using Fluent. Finite-element analysis is verified, the fluid material is selected as the default setting of water-liquid in the material library, the underwater turbulence state is considered, the standard form of the equation of the turbulence model k-ε is selected, and the non-equilibrium wall function is used to deal with the turbulence in the near-wall region. The boundary condition inlet velocity is set to 0.5 m/s. The SIMPLEC algorithm is used for pressure–velocity coupling, and the diffusion term is represented by a second-order center difference format. The static domain velocity inlet and velocity amplitude at the start are set to 0.1 m/s. Other settings remain constant.
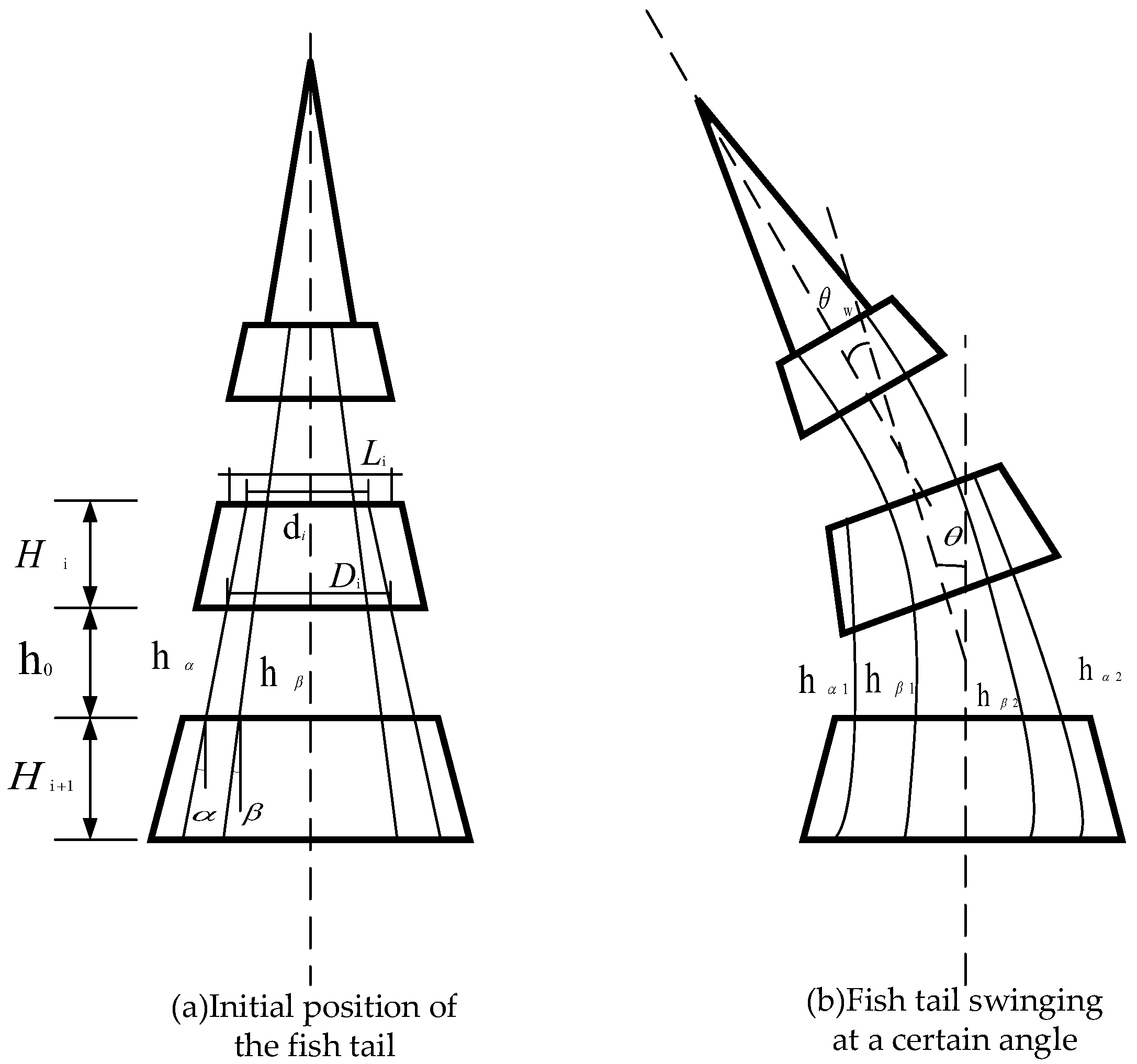
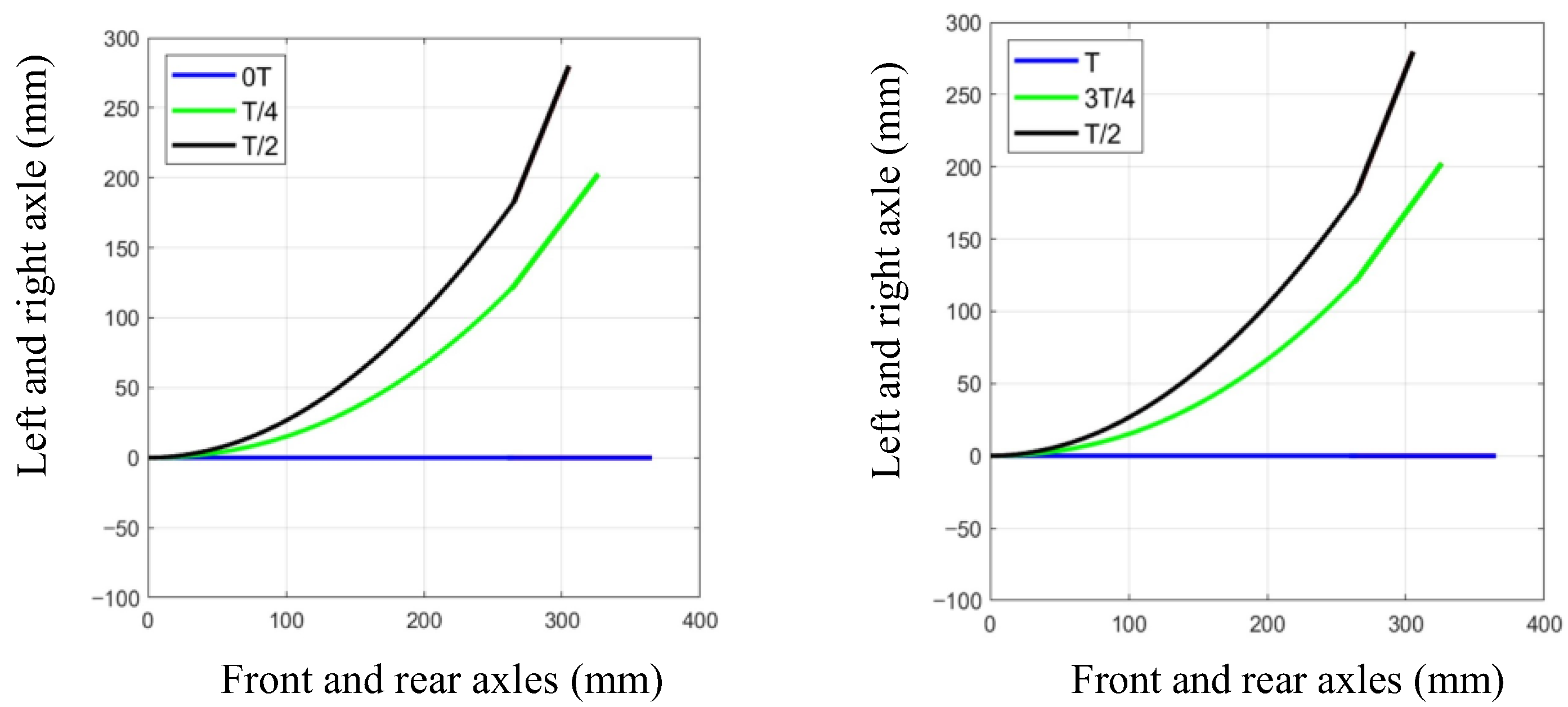
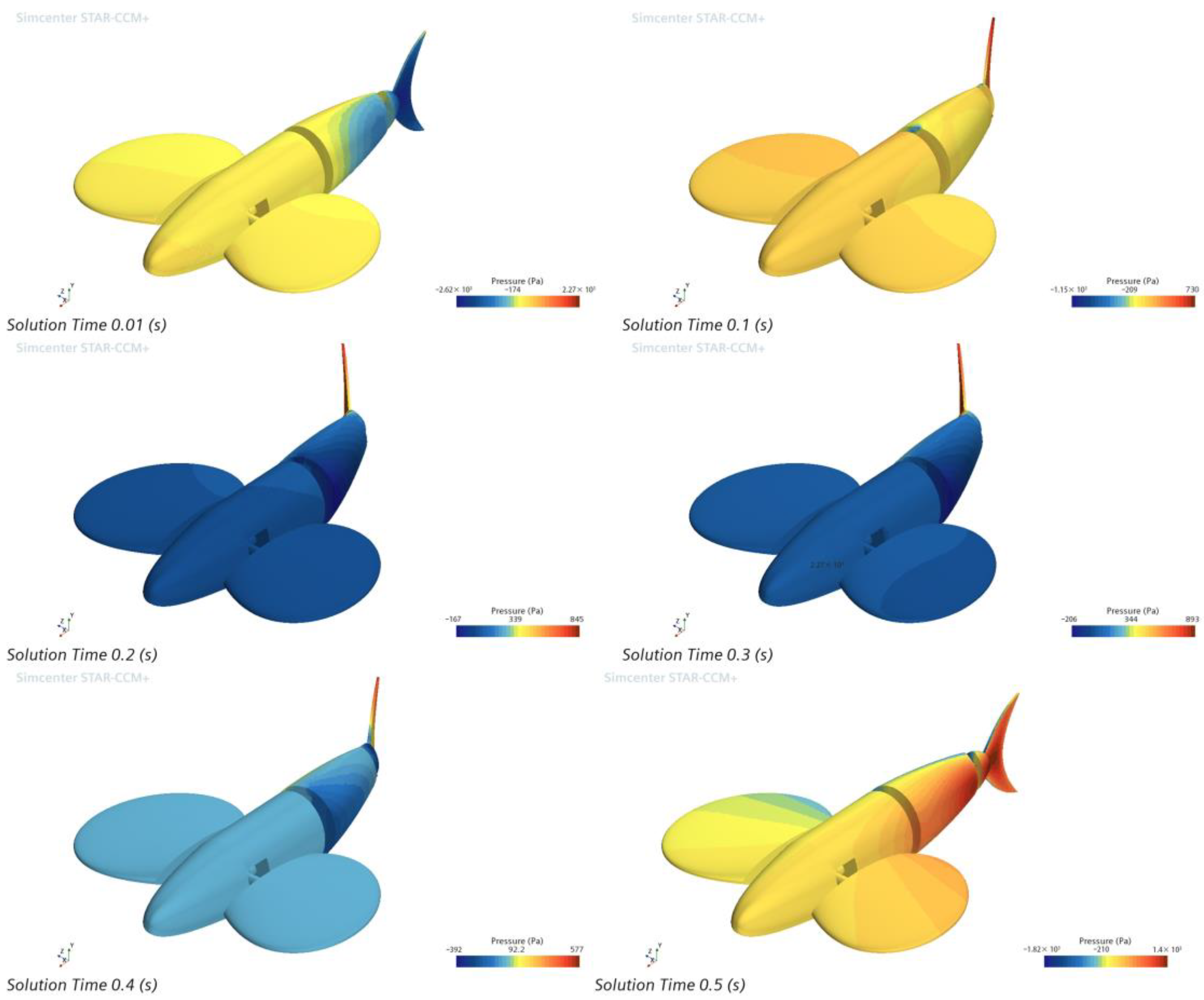
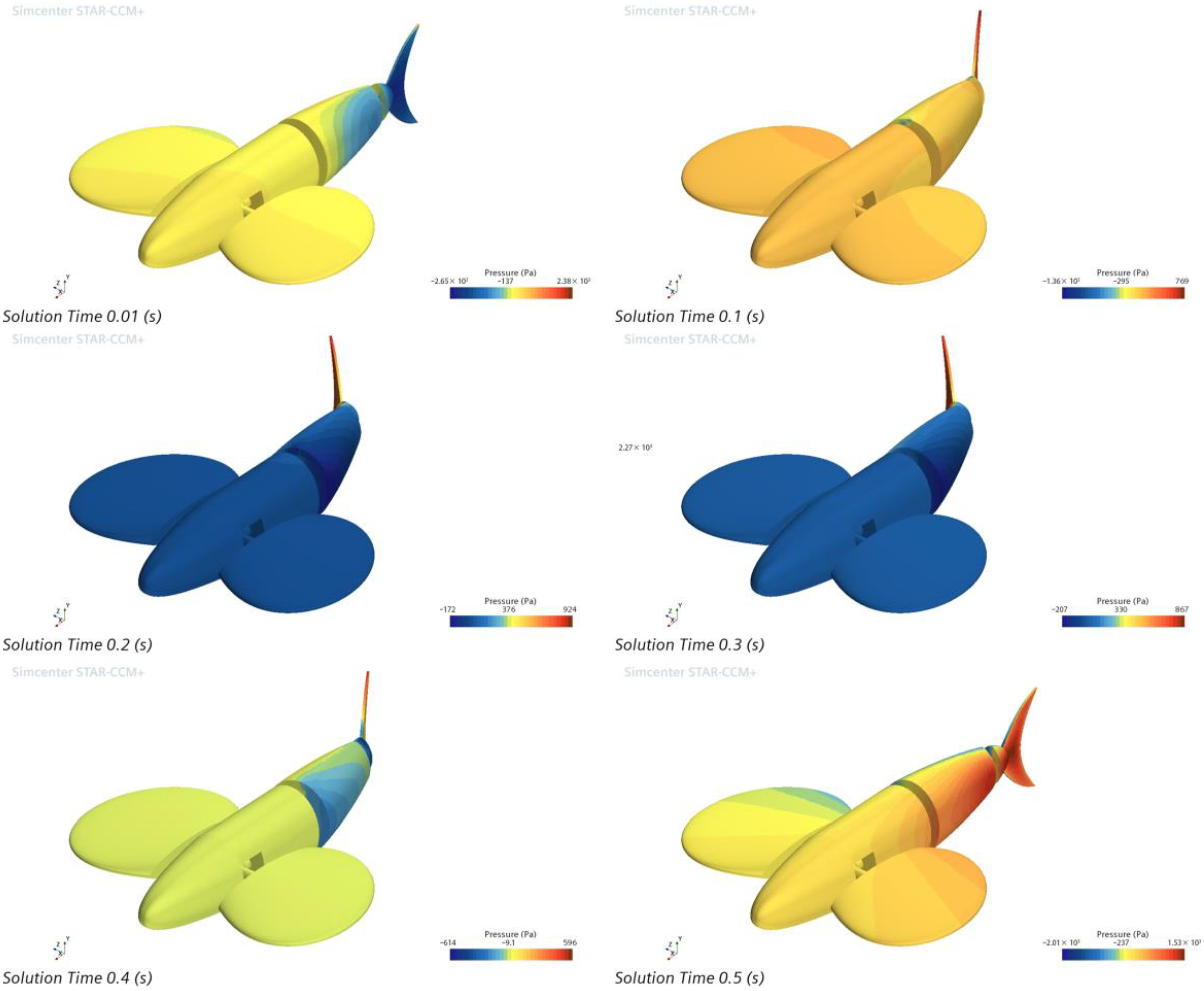
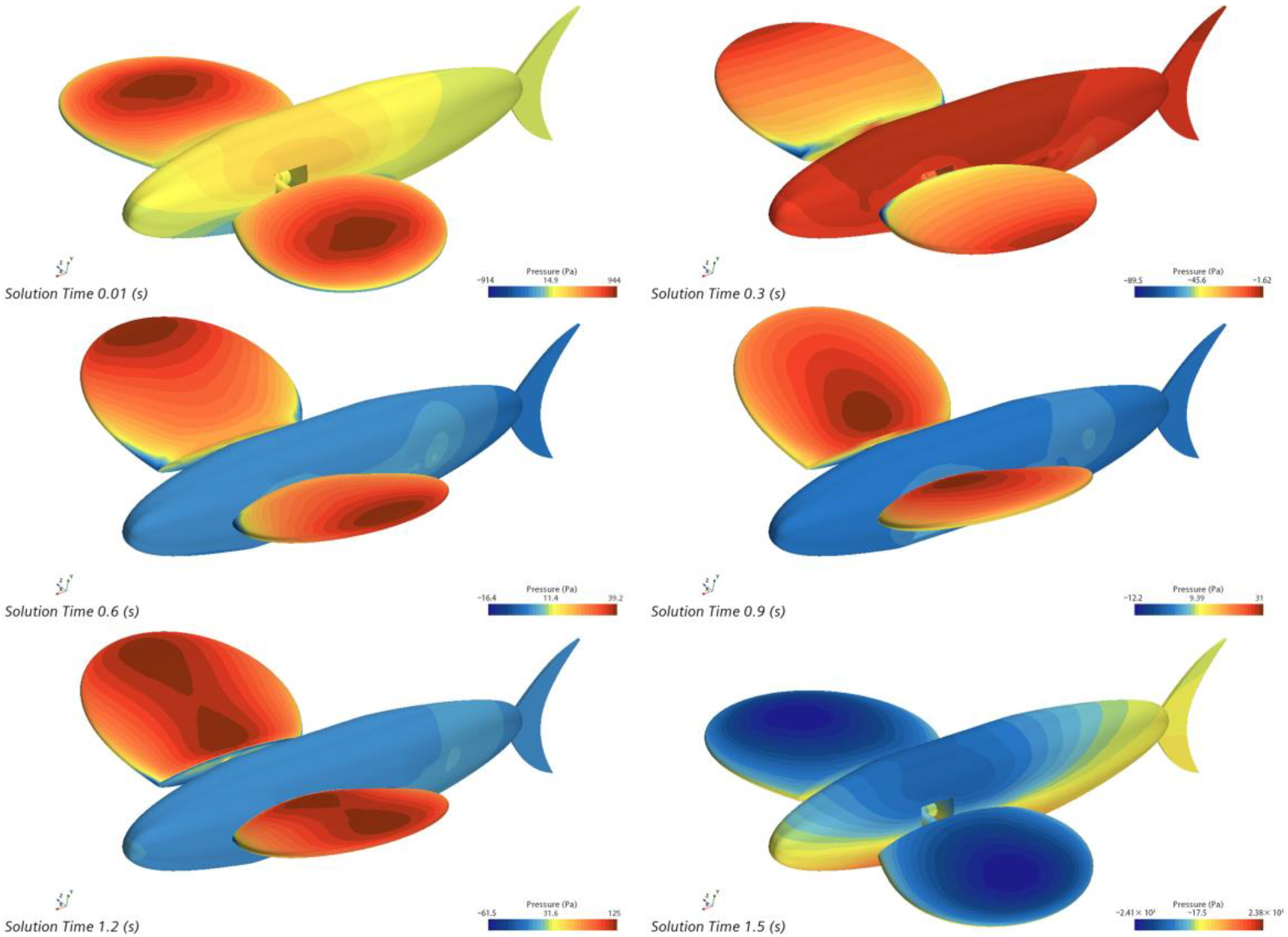
The tail fin of the bionic greenfin robot designed in this paper is mainly used for steering and emergency stop functions, and the steering performance of the tail fin is reflected by the difference between the lateral forces on the fish body and the tail fin when the fishtail is swinging. The fishtail steering relies on the one-way oscillation of the fishtail, which corresponds to the left and right oscillation frequencies of 0.5 Hz, 1 Hz, 1.5 Hz, and 2 Hz, respectively, 1 Hz, 2 Hz, 3 Hz, and 4 Hz. In the simplified model, the tail joint near the fish’s body is swung at an angle of 15°, the tail fin swing is chosen to be 35°, and the simulation time is 3 s. Using 2 Hz as an example, the fishtail steering oscillation takes a value of 0.5 s for one cycle, and the lateral force stabilizes after approximately one cycle. The instantaneous pressure clouds for 0.01 s, 0.1 s, 0.2 s, 0.3 s, 0.4 s, and 0.5 s are shown in
Figure 9. The graphic shows the force on the fish’s body, particularly its tail, during a cycle.
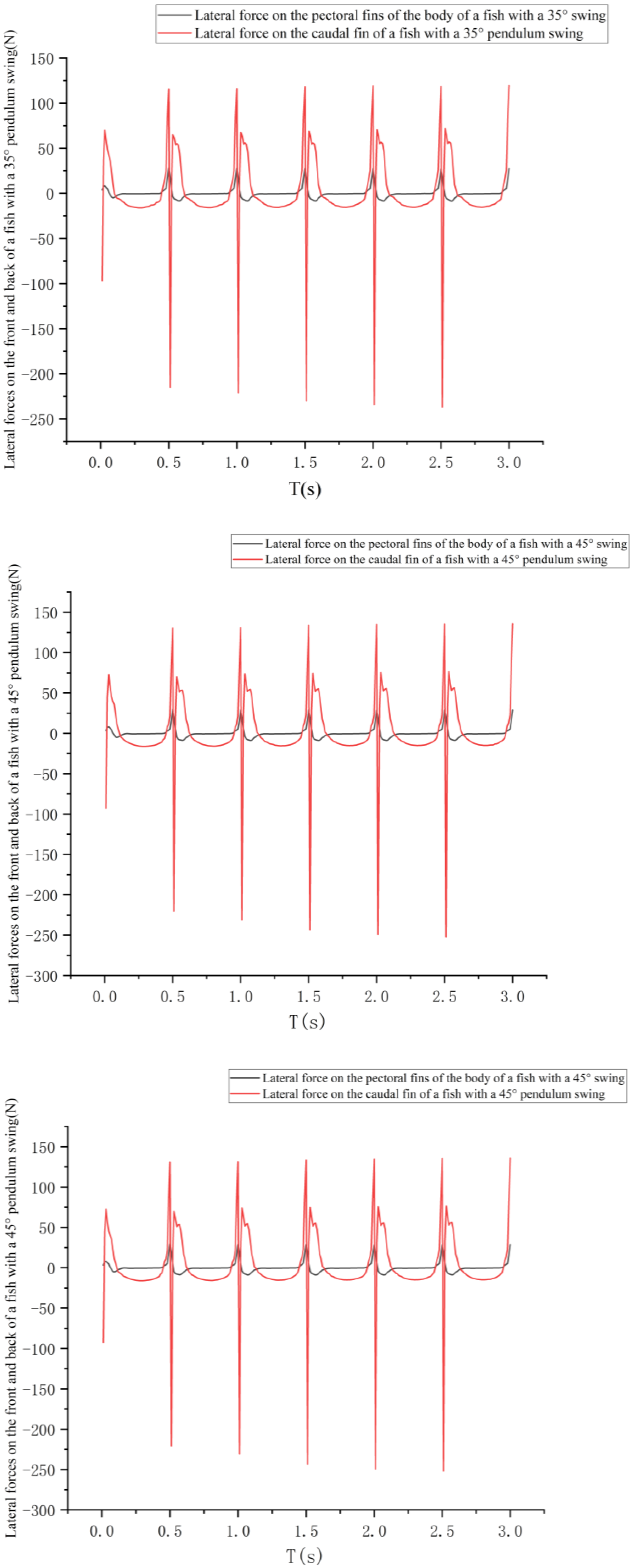
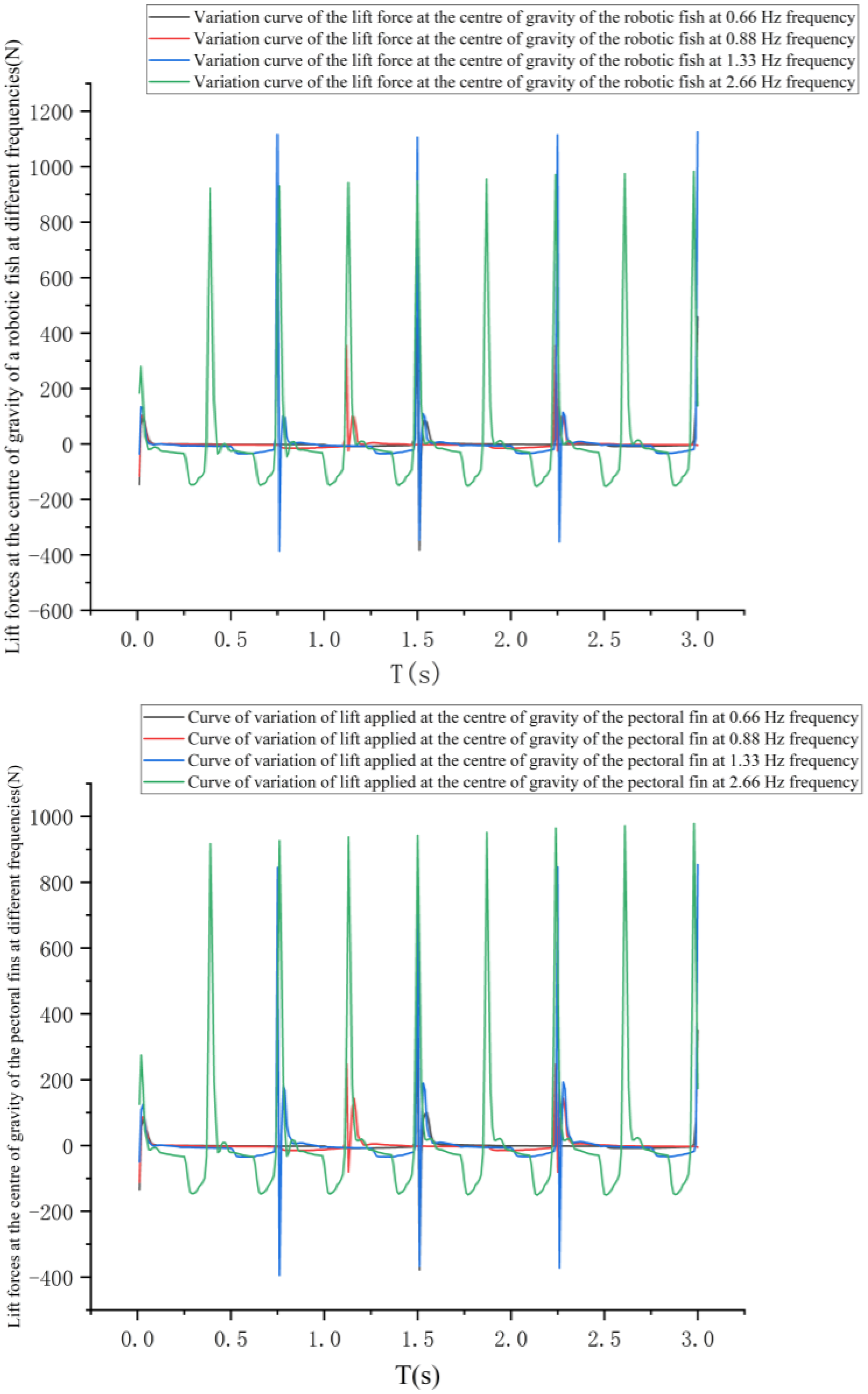
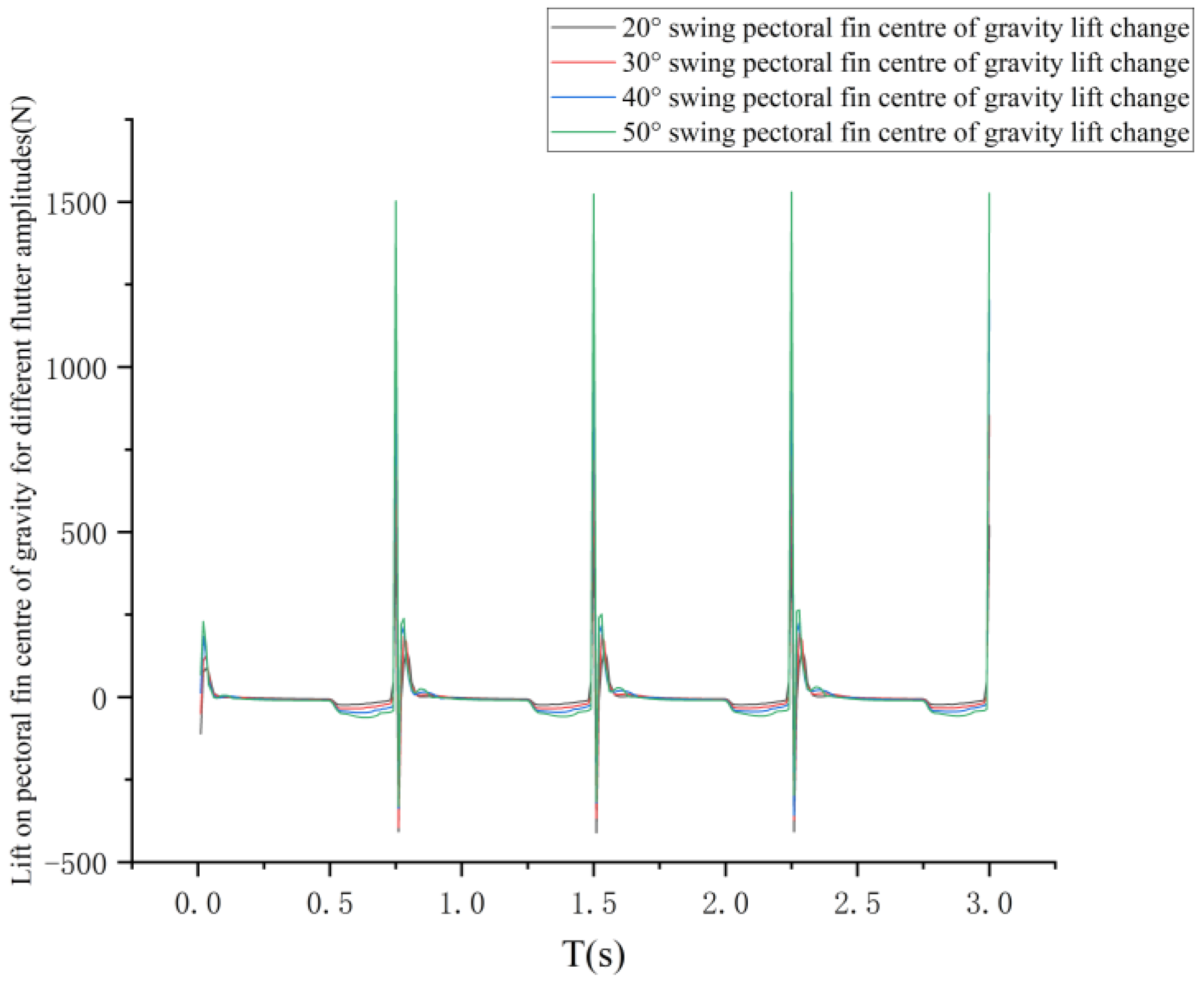
The change in lateral forces on the pectoral and caudal fins of the fish at each of the four frequencies is shown in
Figure 10.
As can be seen in
Figure 10, the lateral forces on the pectoral fins and caudal fins of the fish at the four frequencies also show a cyclic variation within 1 s. By analyzing the variation in the lateral forces on the pectoral fins and caudal fins of the fish within 1 s, the steering performance of the bionic greenfin fish robot at different frequencies can be analyzed.
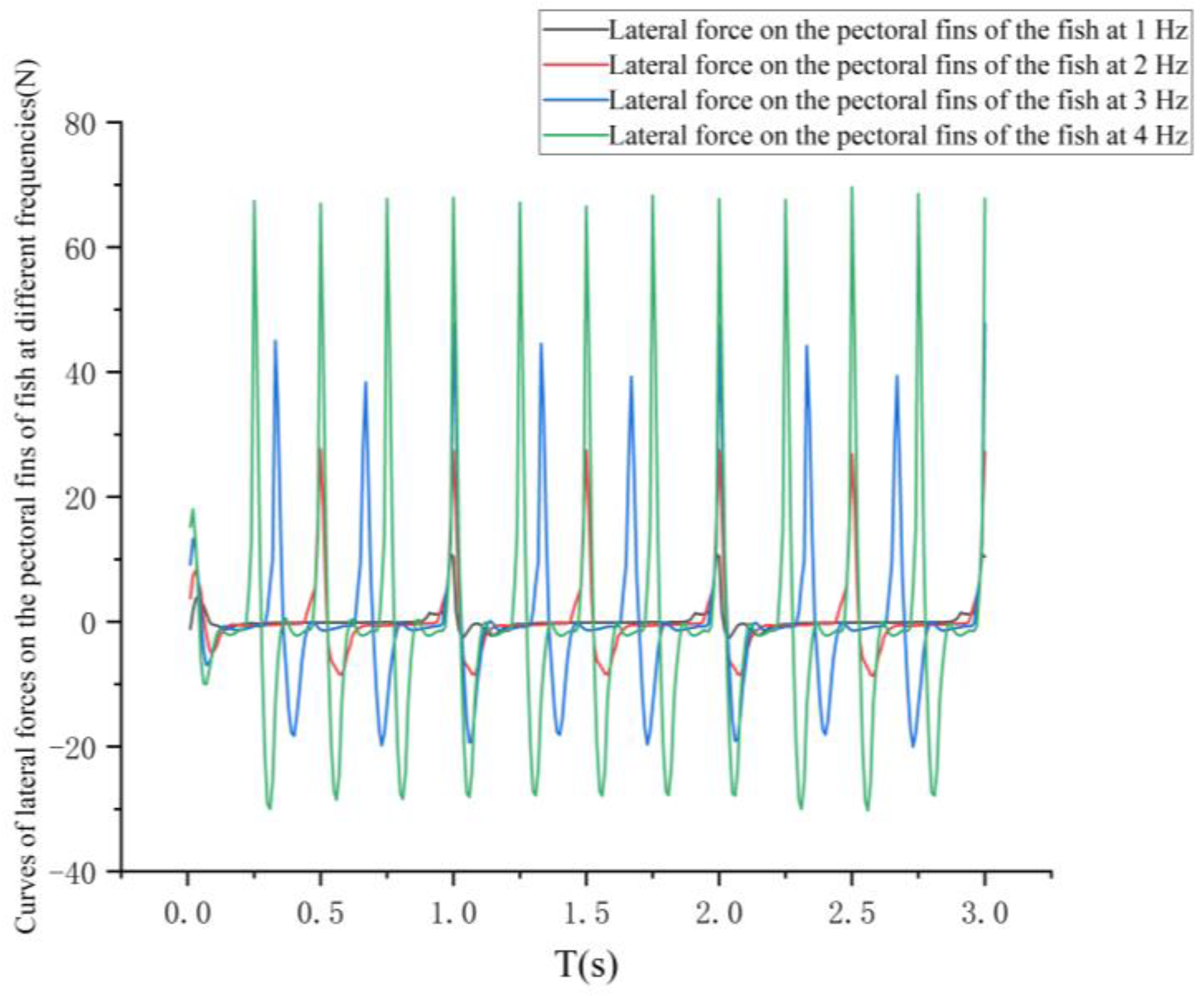
The average lateral force on the pectoral fins of the fish increased with frequency, but the work done by the average lateral force at 1 s was zero, which was attributed to the bigger size of the pectoral fins and the higher inertia of the bow rotation. The average lateral force on the caudal fin increased faster with increasing frequency in 1 s. The average lateral force on the caudal fin at different frequencies is shown in
Figure 11.
Figure 11 shows that frequency has a significant effect on the average lateral force delivered to the caudal fin of the fish in 1 s. At a frequency of 1 Hz and a swing of 35°, the fish swings once in 1 s and the average lateral force generated is so small that it is almost impossible to achieve the steering function; however, at a frequency of 4 Hz, the machine fish can swing 4 times in 1 s and the average lateral force generated in 1 s is more than 10 N, indicating a superior steering performance.
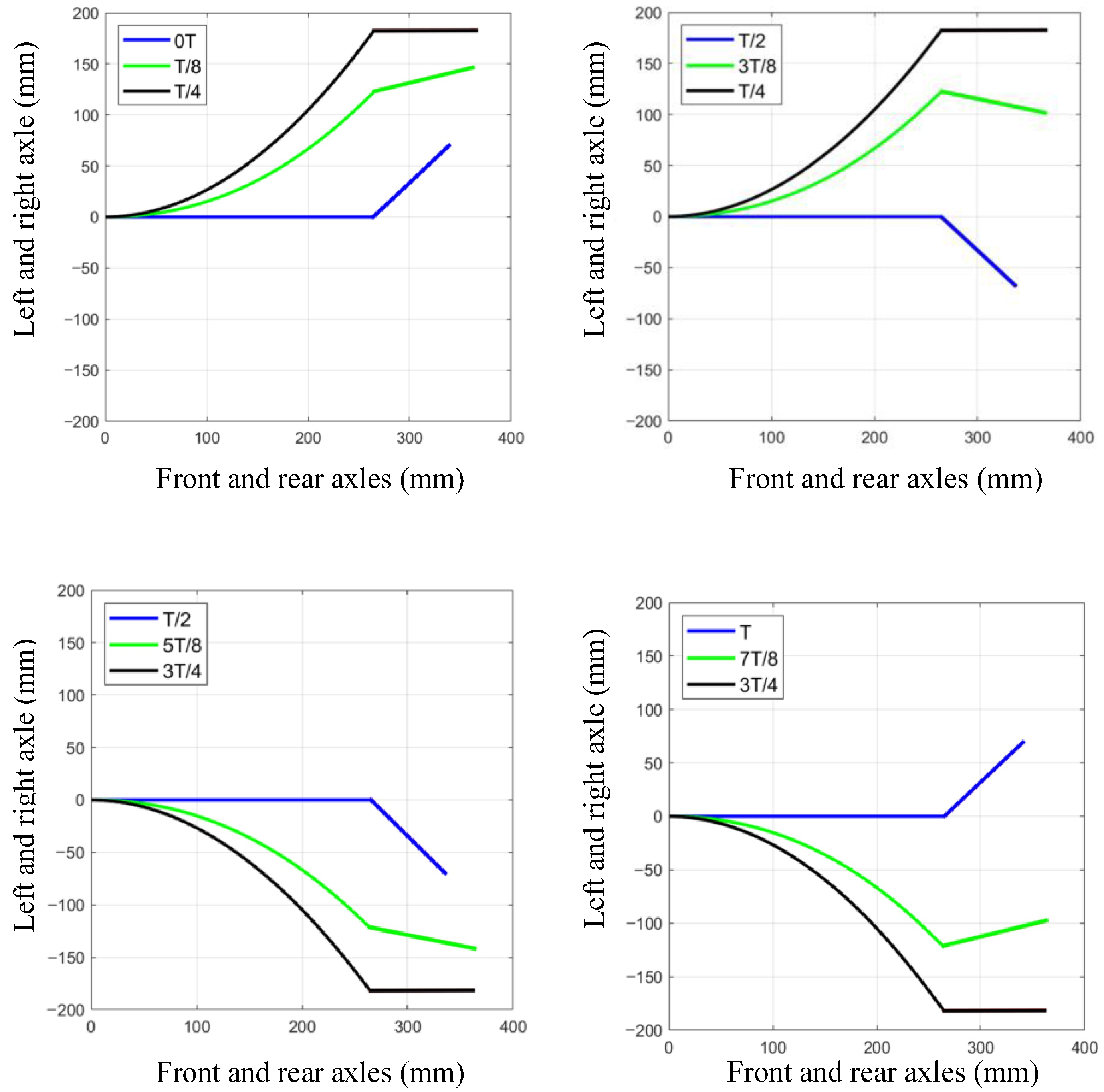
The tail fin swing is another important component that influences the fish’s tail fin steering performance. The frequency is set at 2 Hz, the tail joint turning angle near the body of the fish is 15° and the tail fin joint turning angles are 35°, 40°, 45°, 50°, 55°, and 60° to analyze the effect of the tail fin swing on the tail fin steering performance.
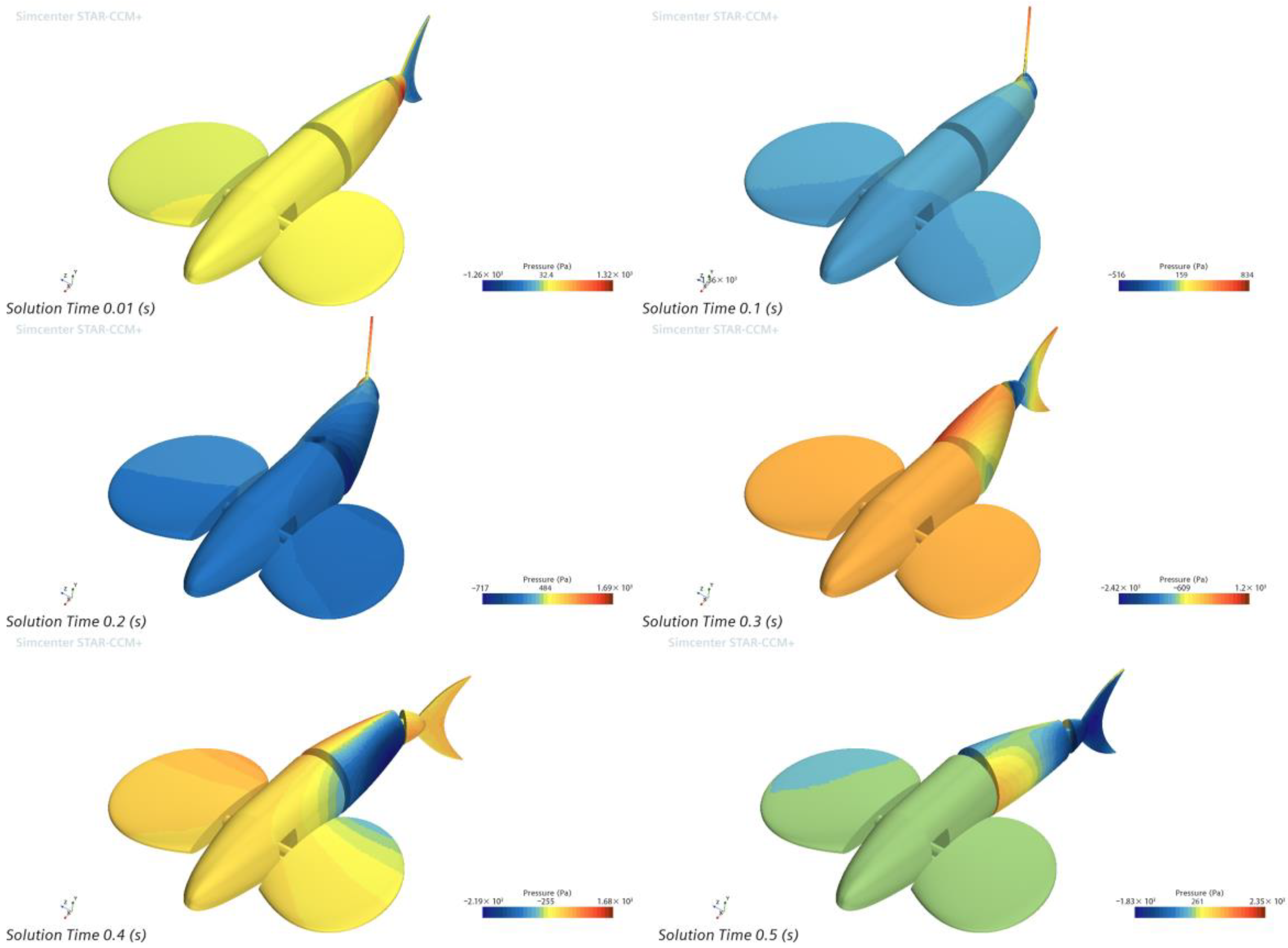
Taking the 40° swing as an example, the time for one cycle of the fishtail steering swing is 0.5 s, and the instantaneous pressure clouds for 0.01 s, 0.1 s, 0.2 s, 0.3 s, 0.4 s, and 0.5 s in one cycle are shown in
Figure 12.
Figure 12 shows that the force on the caudal fin of the fish tail was greater at 0.01 and 0.5 s, with dramatic and substantial fluctuations, but the force on the pectoral fin was less variable.
The lateral forces on the pectoral and caudal fins of the fish at different swing amplitudes are shown in
Figure 13.
As can be seen in
Figure 13, the lateral forces on the pectoral and caudal fins of the fish also vary periodically within 1 s at different caudal fin swings.
The average lateral force in 1 s on the pectoral fin of the fish also remained essentially around 0 for different caudal fin swings. The mean lateral force on the caudal fin increased with increasing caudal fin swing over 1 s.
Figure 14 depicts the average lateral force on the caudal fin during various caudal fin swings.
From
Figure 14, it is obtained that the average lateral force applied to the caudal fin of the fishtail in 1 s increases faster when the swing amplitude increases from 35° to 45°, then slows down after exceeding 45°. After exceeding 55°, the average lateral force supplied to the caudal fin of the fishtail in 1 s starts to drop significantly as the fishtail swing amplitude increases. When the bionic greenfin fish robot steering function is enabled with a swing frequency of 2 Hz and a tail fin swing amplitude of 45°, it reduces the rudder torque pressure and increases the service life while maintaining a better steering performance.
When the phase difference of caudal fin oscillations is positive, i.e., when the caudal fin oscillations lag behind those of the tail, the bionic fish swims normally; when the phase difference of caudal fin oscillations is negative, i.e., when the tail oscillations lag behind those of the caudal fin, the bionic fish swims in reverse.
Frequency is an important factor affecting the propulsion performance of the bionic fish robot. The emergency stop function requires a rapid stop in a short period of time, which is impossible to execute when the tail fin swing frequency is excessively low. This section investigates the effect of frequencies 1 Hz, 1.5 Hz, and 2 Hz on the emergency stop function of the bionic greenfin fish robot at 15° fish tail swing and 35° tail fin swing.
Using 2 Hz as an example, the tail fin negative phase oscillation time of one cycle is 0.5 s, and the surface pressure cloud of the bionic greenfin fish robot every 0.1 s is shown in
Figure 15.
The propulsive force fluctuates with time, as seen in
Figure 15, where the pressure is gradually transferred from the front to the back over one cycle of tail fin oscillation at a frequency of 2 Hz.
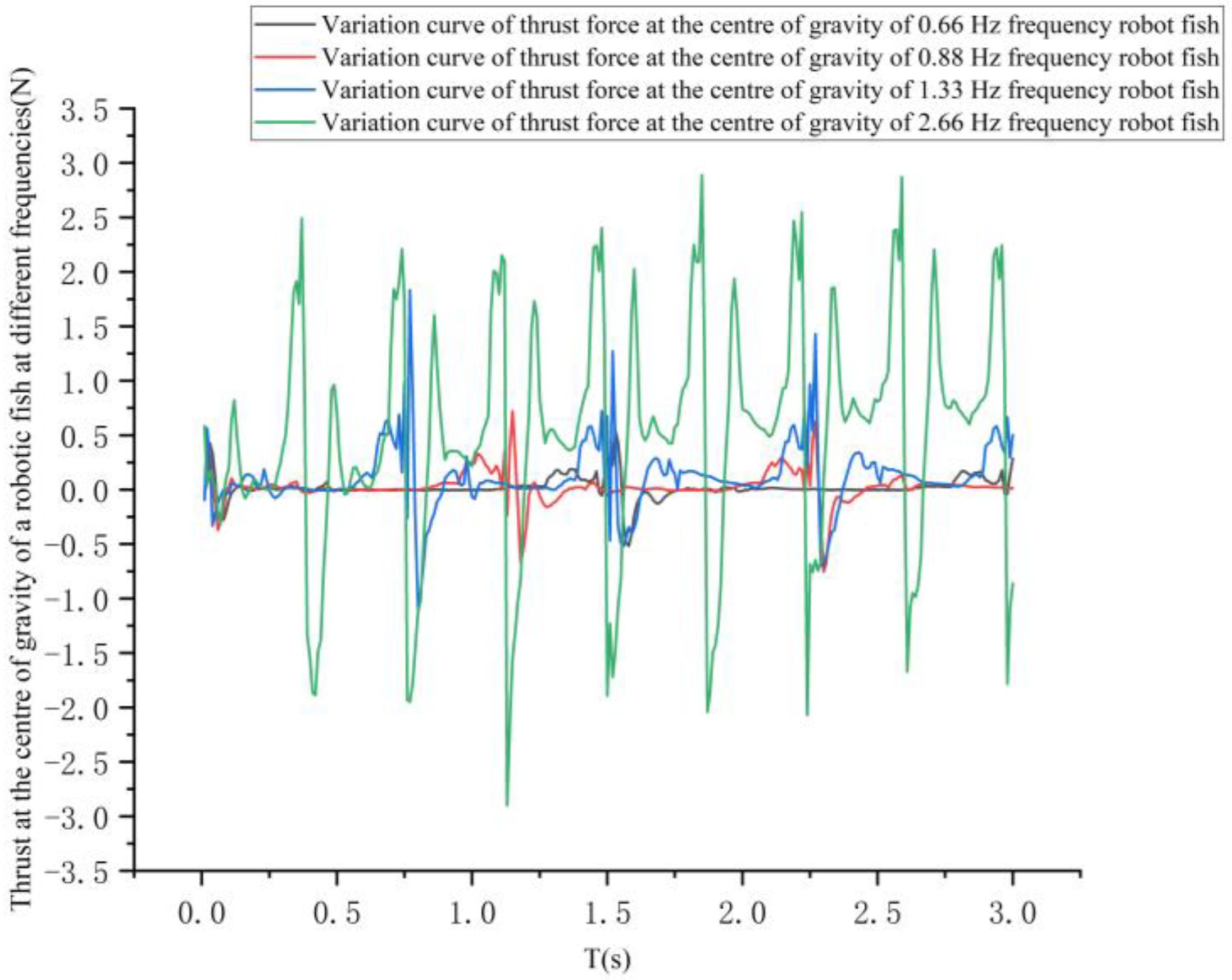
The thrust variation curves for the negative phase oscillation of the tail fin at different frequencies are shown in
Figure 16.
As the frequency increases, so does the amplitude of the change in thrust caused by the tail fin’s negative phase oscillation, as well as the impulse in the direction of drag generated in one cycle.
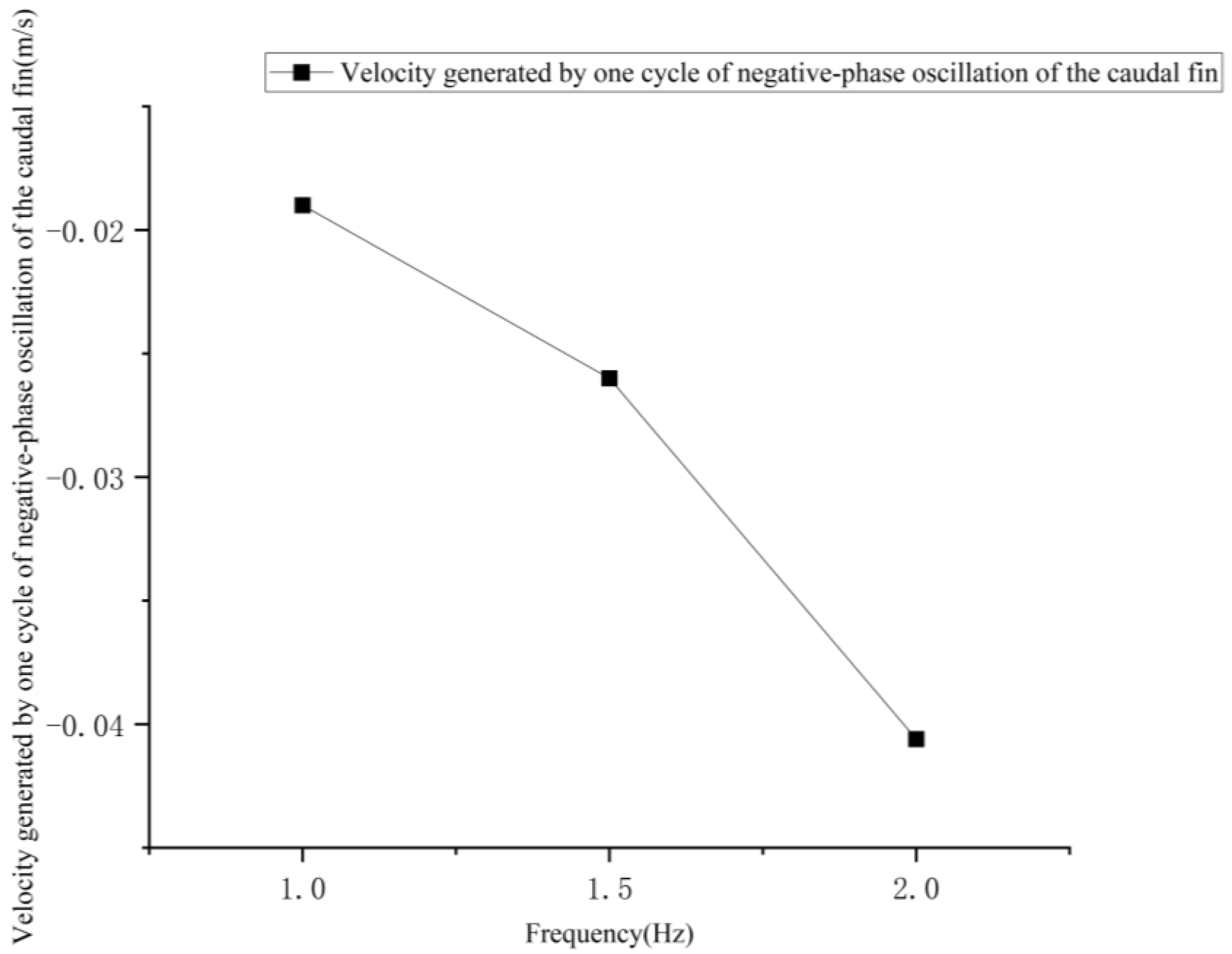
The velocity change curve generated by one cycle of negative phase oscillation of the tail fin at different frequencies is shown in
Figure 17.
Tail fin swing amplitude is also a major factor in tail fin propulsion performance, as it is in the application of negative phase oscillation. This section investigates the effect on the negative phase oscillation performance of the tail fin at a 2 Hz oscillation frequency with a tail joint oscillation of 15° and tail fin joint oscillations of 35°, 45°, 55°, and 65°, respectively.
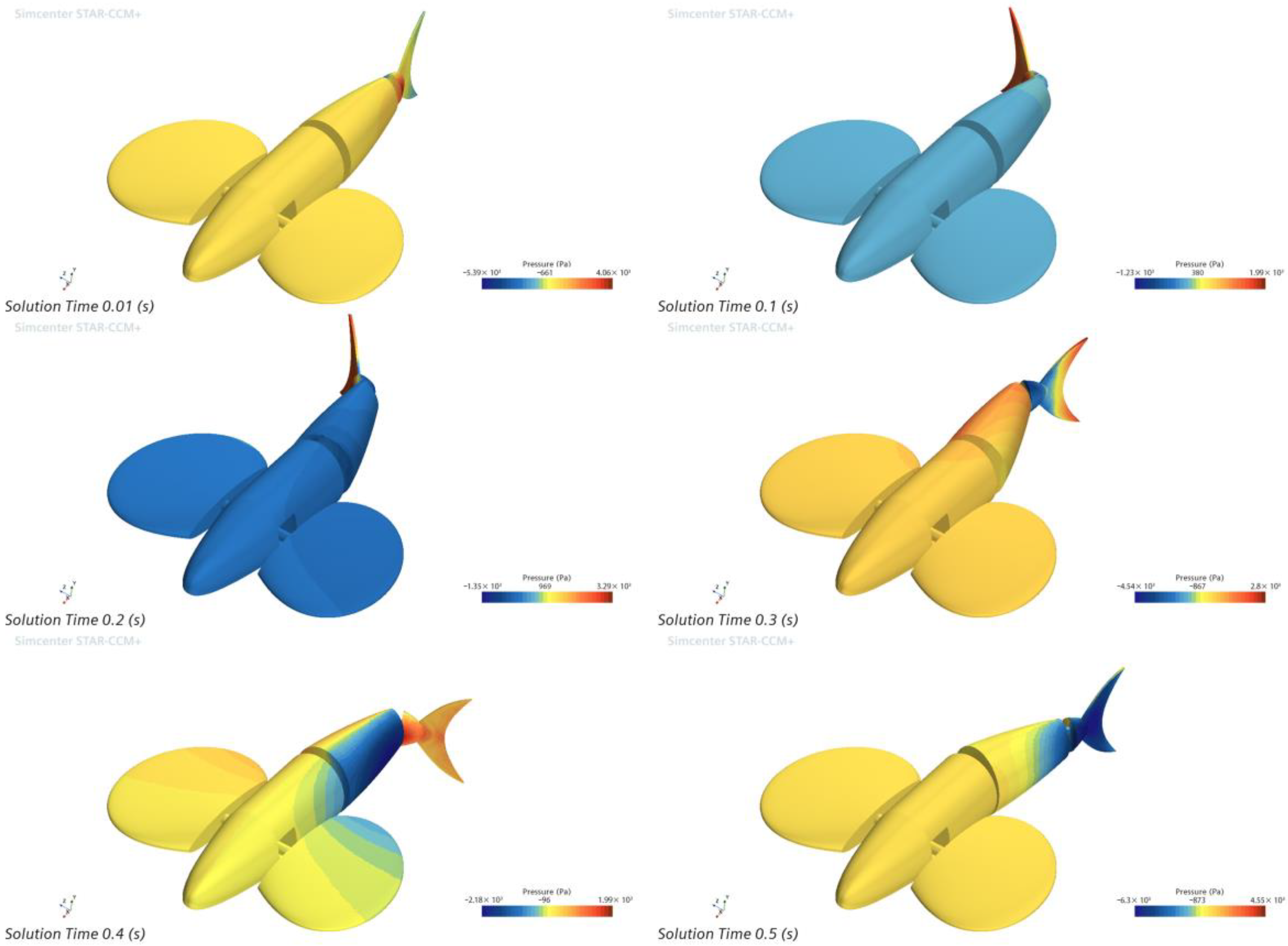
Taking the 65° tail fin swing as an example, the tail fin negative phase swing has a cycle time of 0.5 s, and the surface pressure cloud of the bionic greenfin fish robot every 0.1 s is shown in
Figure 18.
Figure 18 depicts how, at a caudal fin negative phase swing of 65° and a frequency of 2 Hz, pressure is gradually transferred from the head to the rear over one cycle of caudal fin swing in the bionic greenfin fish robot, indicating a change in propulsive force over time similar to the change in
Figure 15.
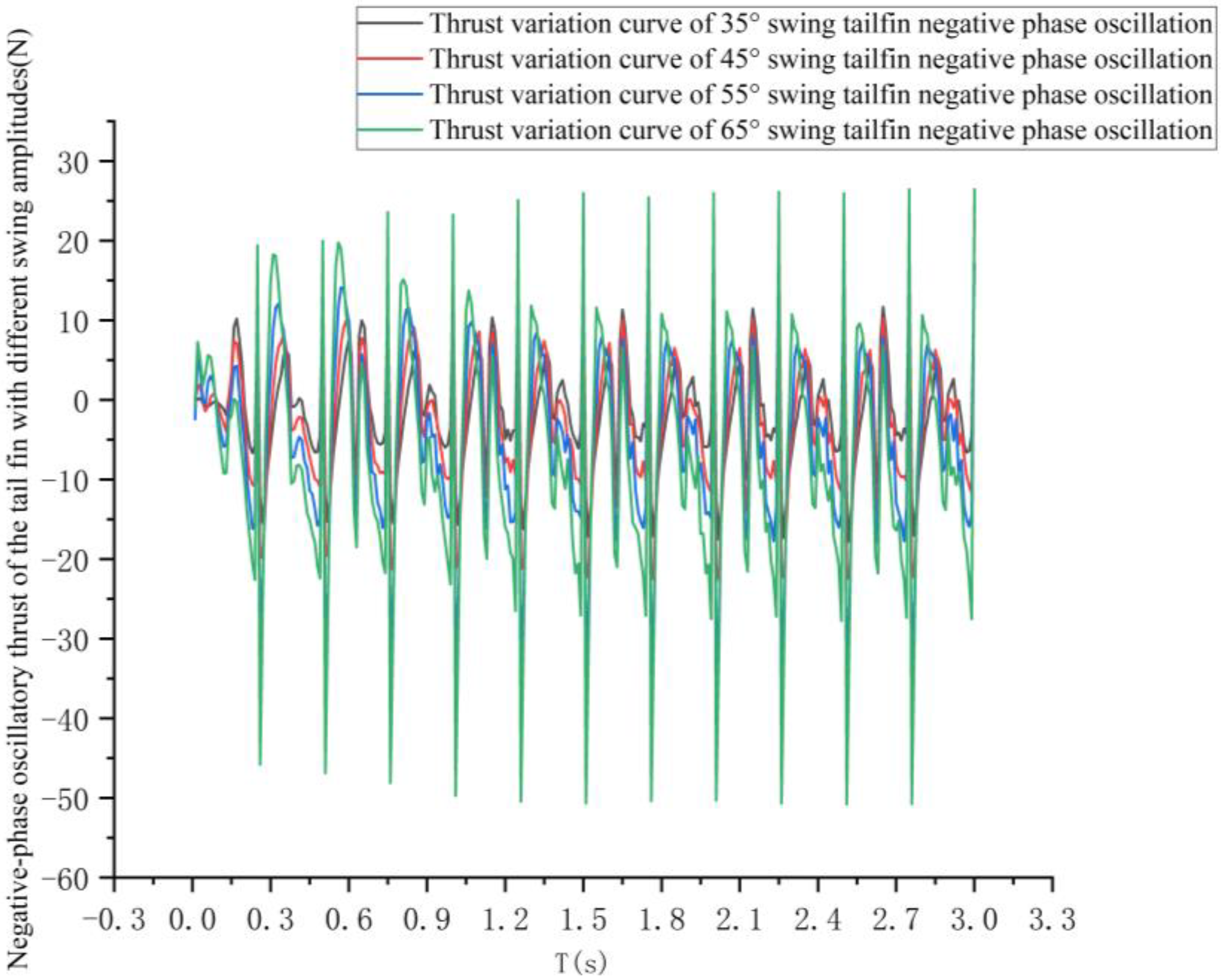
The curve of the change in thrust generated by the negative phase oscillation of the tail fin for the four tail fin oscillation amplitudes is shown in
Figure 19.
Analysis of
Figure 19 shows that as the tail fin swing increases, the amplitude of the change in thrust generated by the negative phase oscillation of the tail fin increases, and the impulse in the direction of drag generated in one cycle also increases.
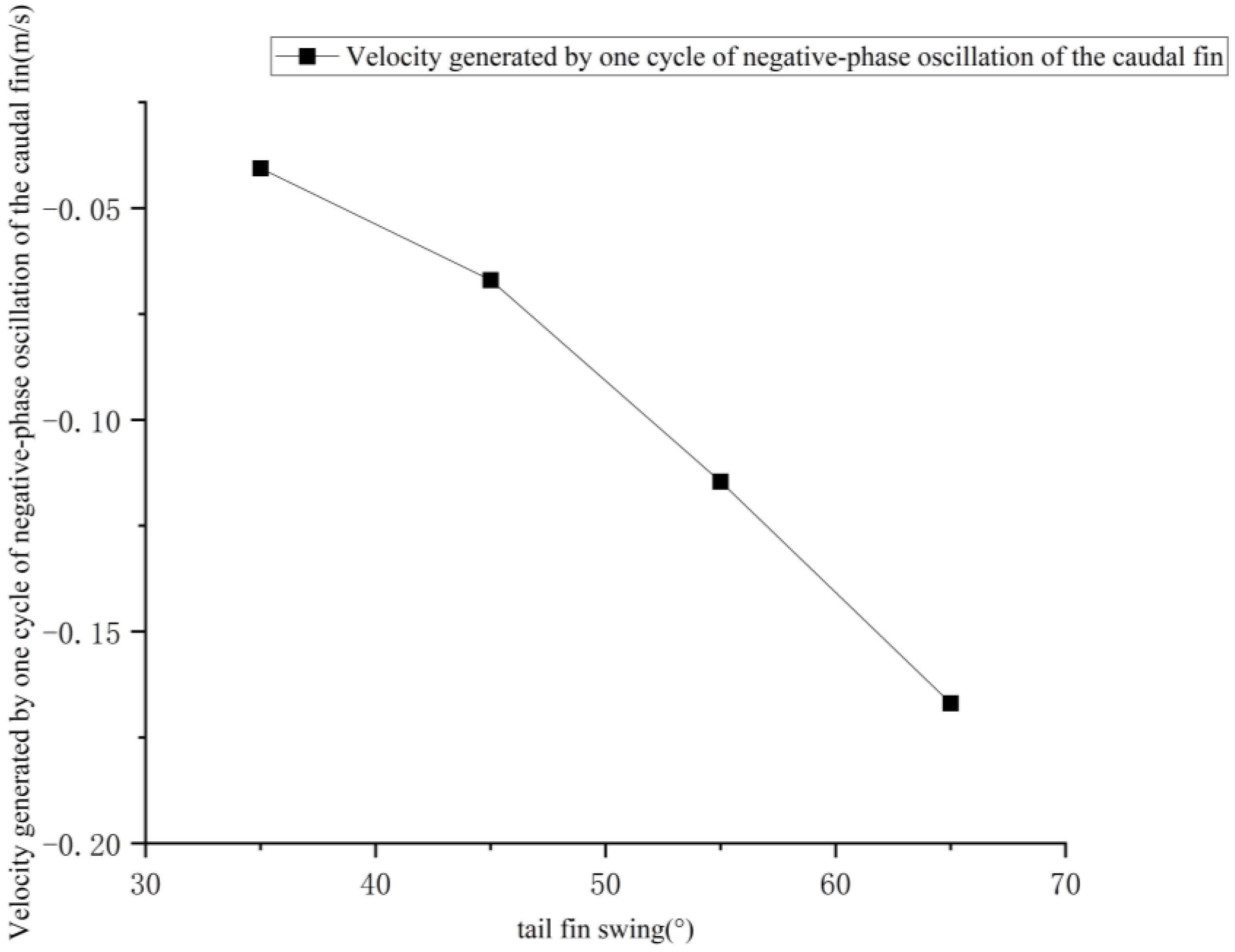
The velocity change curves produced by one cycle of negative phase tail fin swing for the four tail fin swing amplitudes are shown in
Figure 20.
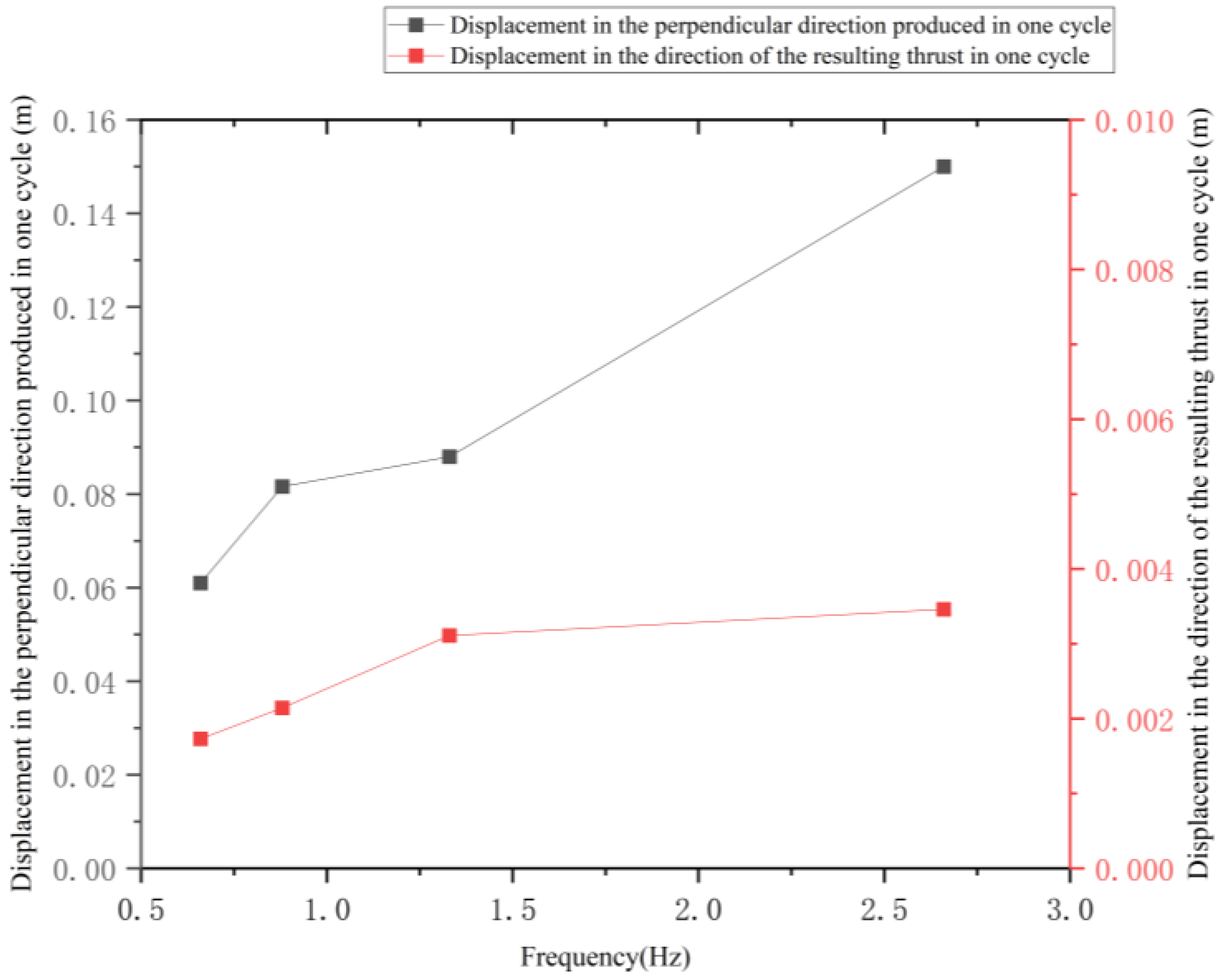
As the tail fin swing amplitude increases, the velocity generated in one cycle of negative phase tail fin swing also increases, with the fastest growth in velocity occurring between 45° and 55° of swing amplitude, and the increase in velocity slows down as the swing amplitude continues to increase beyond 55°. Considering the performance of the servo and its service life, the tail fin swing amplitude of the emergency stop function of the bionic greenfin fish robot in this paper was preferentially chosen to be 45°.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}