
Oscillatory Forward-Looking Sonar Based 3D Reconstruction Method for Autonomous Underwater Vehicle Obstacle Avoidance


 , ,
, ,
Abstract
1. Introduction
- (1)
- Propose a three-dimensional reconstruction method based on an oscillatory forward-looking sonar, which extends the perception range of two-dimensional sonar into three-dimensional space.
- (2)
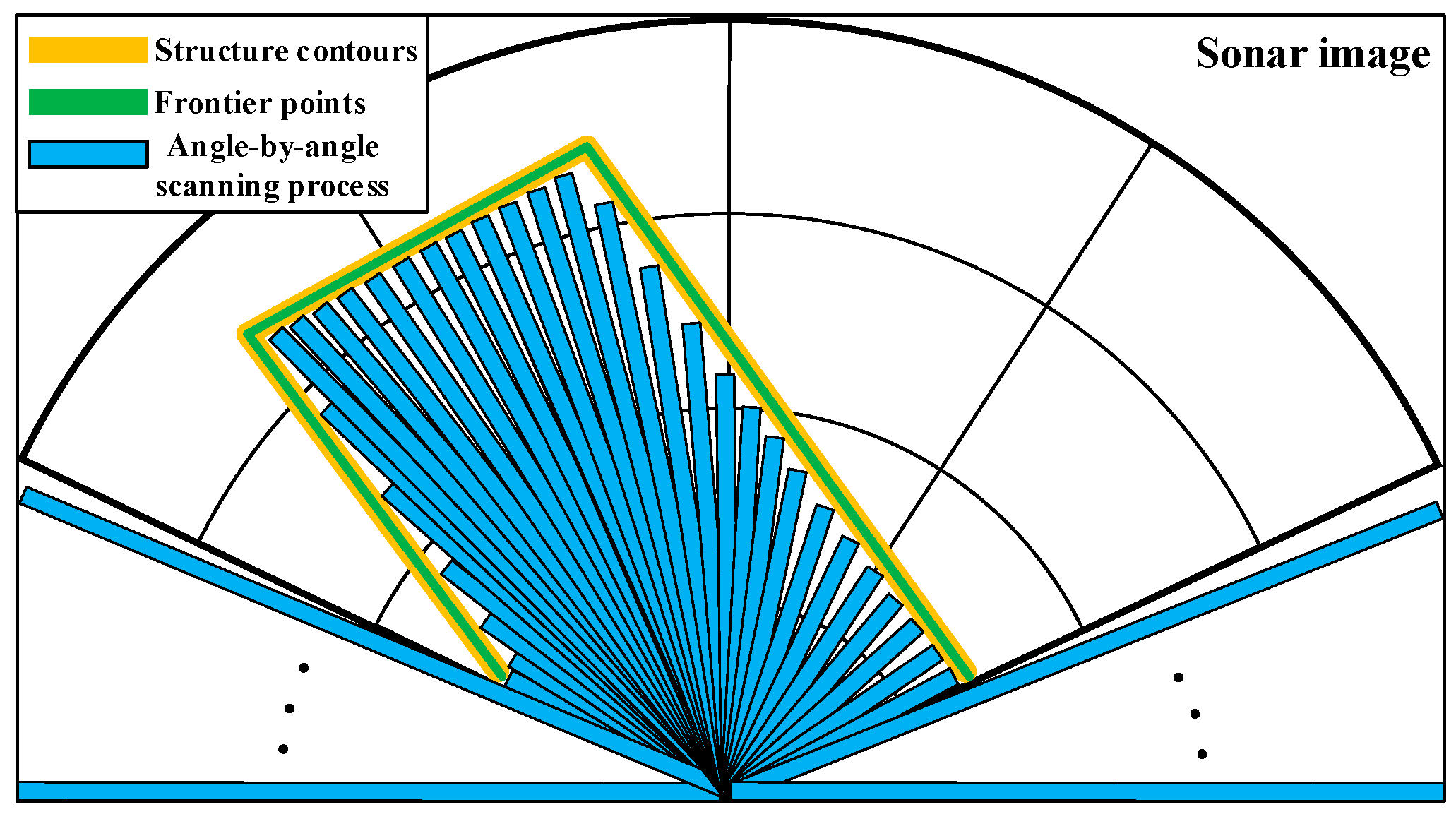
- Design a frontier extraction algorithm based on polar coordinates for sonar images, enhancing the completeness and accuracy of frontier extraction.
- (3)
- Integrate the three-dimensional reconstruction method with the Ego-Planner path planning algorithm and MPC algorithm to establish a comprehensive underwater three-dimensional perception, planning, and control system.
- (4)
- Verify the effectiveness and robustness of the proposed method through outdoor bridge pier scanning experiments and obstacle avoidance tests in simulation environments.
2. System Design
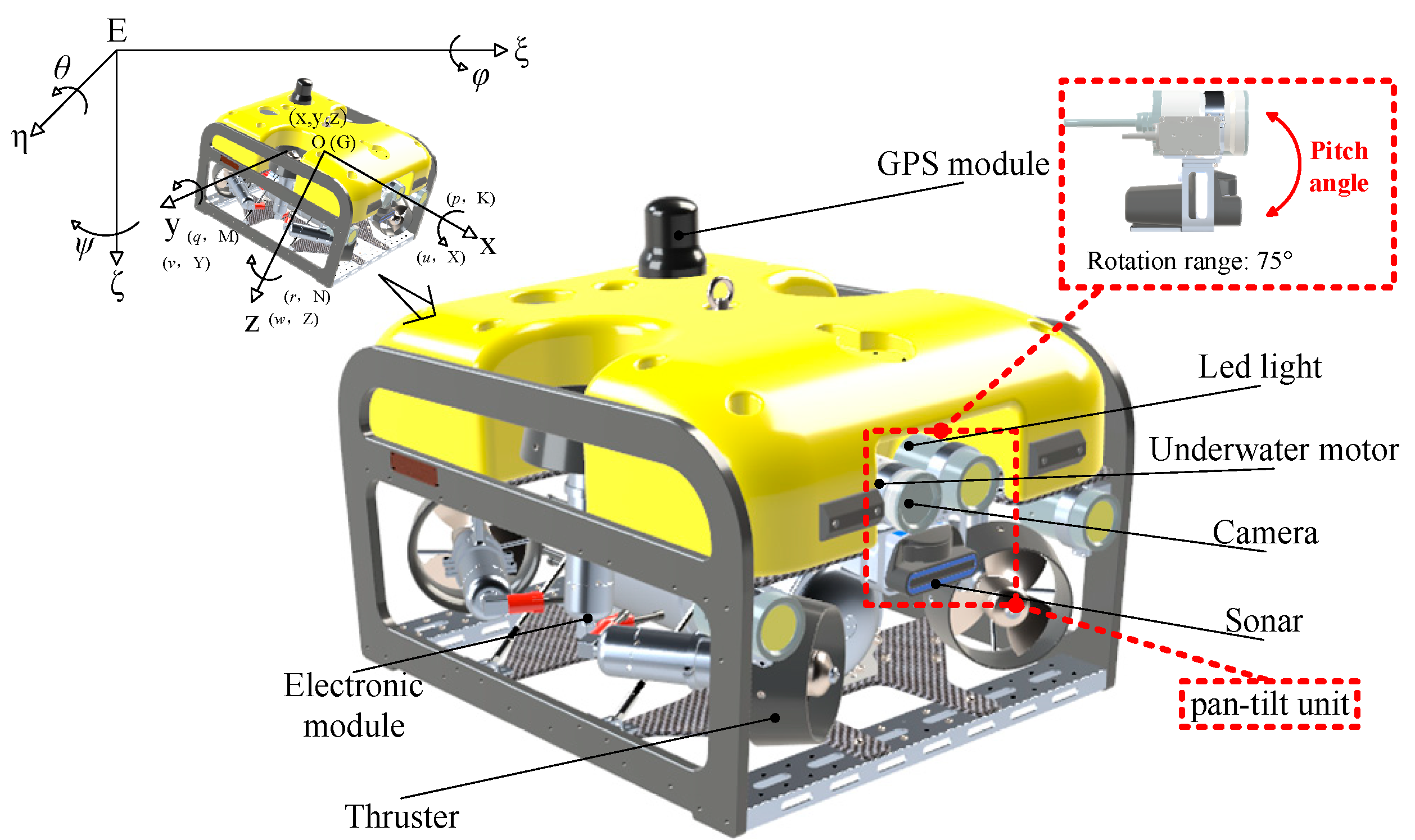
2.1. Hardware Architecture
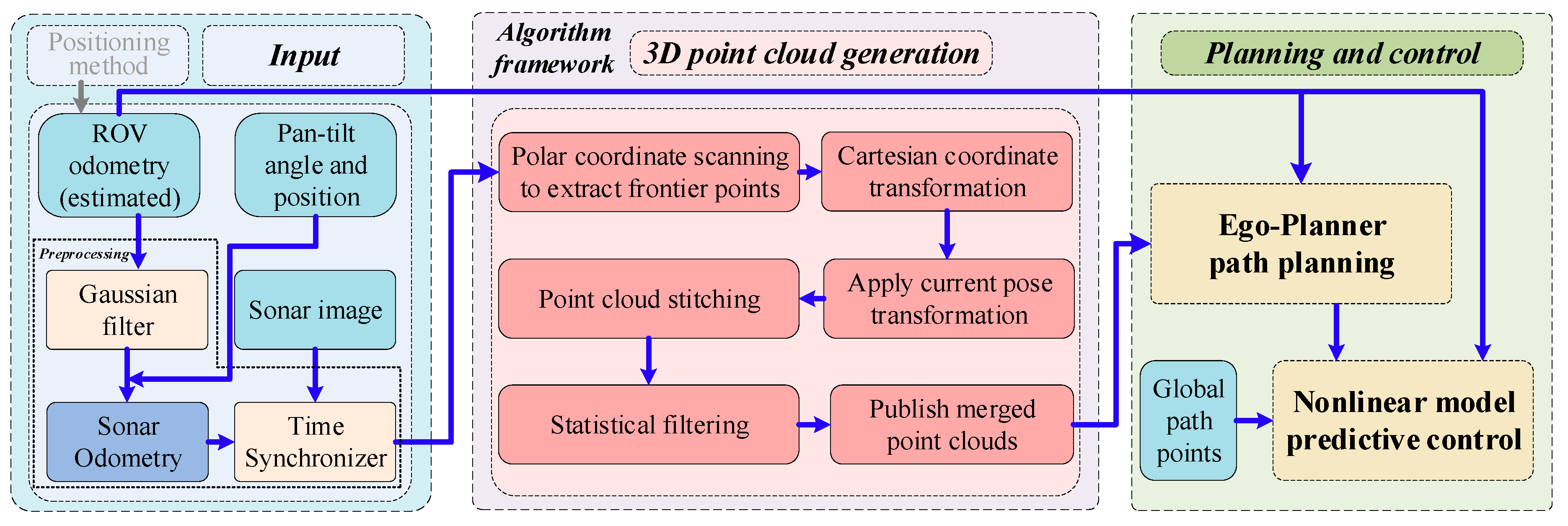
2.2. Software Architecture
3. Materials and Methods
3.1. Three-Dimensional Point Cloud Generation
| Algorithm 1 Polar Frontier Detection |
|
3.2. Motion Control Strategy
- Initial Trajectory Generation: A minimum-jerk or minimum-snap trajectory connecting the start and goal points is initially generated without considering obstacles, satisfying only boundary state constraints.
- Collision Detection and Penalty: Using point cloud data, the A* algorithm identifies collisions between the initial trajectory and obstacles. A refined collision penalty cost function is formulated to ensure effective obstacle avoidance during subsequent optimisation.
- Trajectory Optimisation Model: The trajectory is parameterised using B-spline curves, and an optimisation model incorporating smoothness, static obstacle avoidance, and dynamic feasibility is established. Iterative optimisation produces collision-free, smooth trajectories.
- Temporal Reallocation and Trajectory Refinement: When dynamic feasibility constraints are violated in specific trajectory segments, Ego-Planner reallocates temporal parameters and reconstructs the optimisation model to incorporate smoothness, dynamic constraints, and curve fitting, thereby generating executable trajectories.
- Predictive Model: As the foundation of MPC, the predictive model characterises the system’s dynamic behaviour. It utilises the current state and future control inputs to forecast output states over a defined prediction horizon.
- Receding Horizon Optimisation: Unlike conventional global optimal control strategies, MPC employs a receding horizon approach. At each sampling instant, it computes the optimal control sequence over a finite prediction window by minimising a predefined cost function, subject to the current system state and imposed constraints.
- Feedback Correction: Discrepancies between predicted and actual system outputs may result from model inaccuracies, external disturbances, or system nonlinearities. To mitigate these effects, MPC integrates real-time feedback by measuring output errors and adjusting subsequent predictions accordingly. This mechanism improves robustness to uncertainties and ensures reliable performance across varying operational conditions.
4. Experimental Validation
4.1. Three-Dimensional Reconstruction Experiment in Stationary Mode
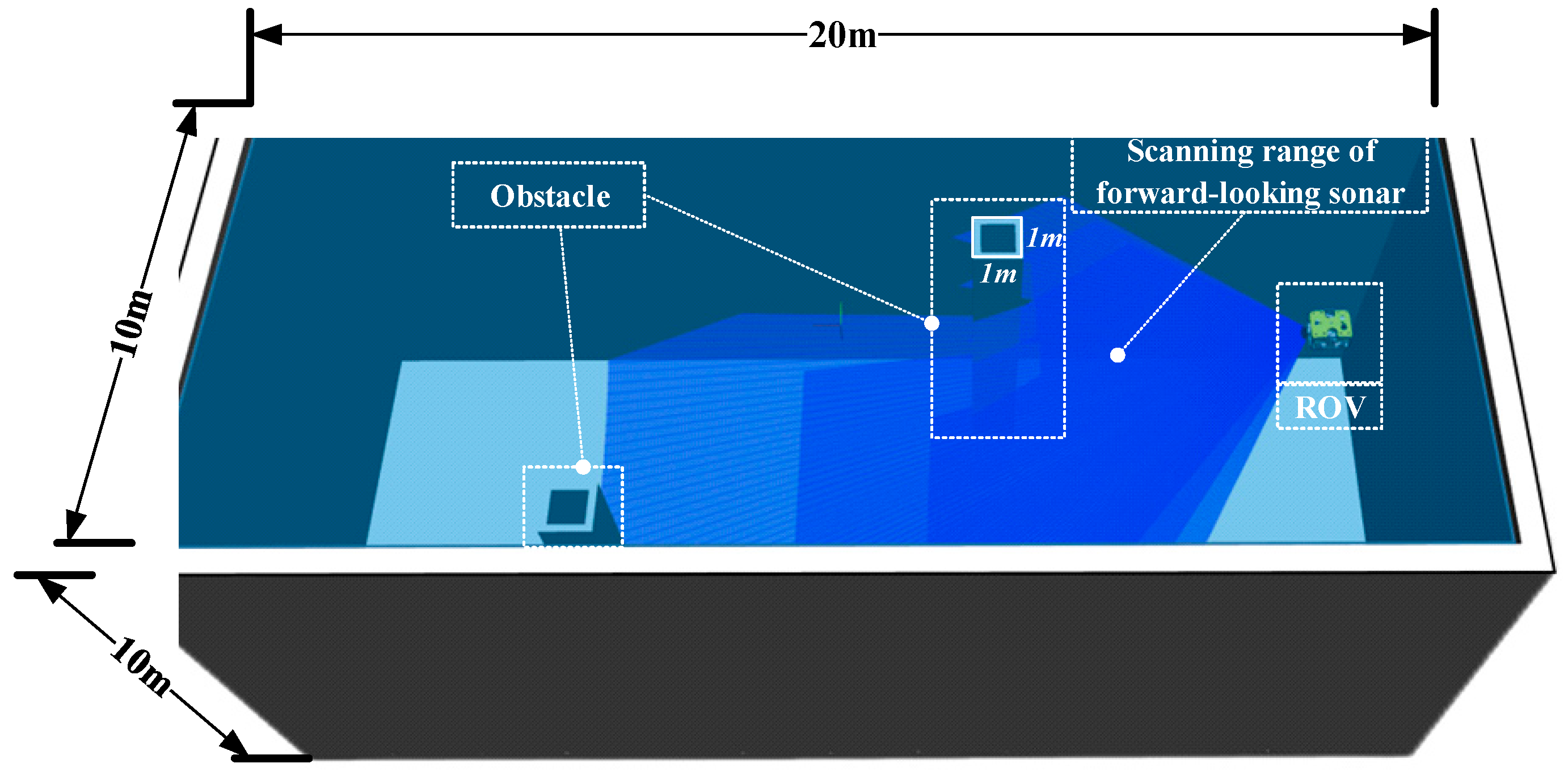
4.2. Three-Dimensional Reconstruction of Water Tank Environment and Autonomous Obstacle Avoidance Experiments
5. Conclusions and Future Perspectives
- (1)
- The oscillatory forward-looking sonar extends the perception range of traditional two-dimensional sonar to a 75-degree pitch angle through a pan-tilt mechanism, enabling effective 3D underwater environment perception at a significantly lower cost than professional 3D sonar systems.
- (2)
- The polar coordinate-based sonar image feature extraction method captures complete contour frontier information, thereby enhancing the accuracy and reliability of 3D reconstruction.
- (3)
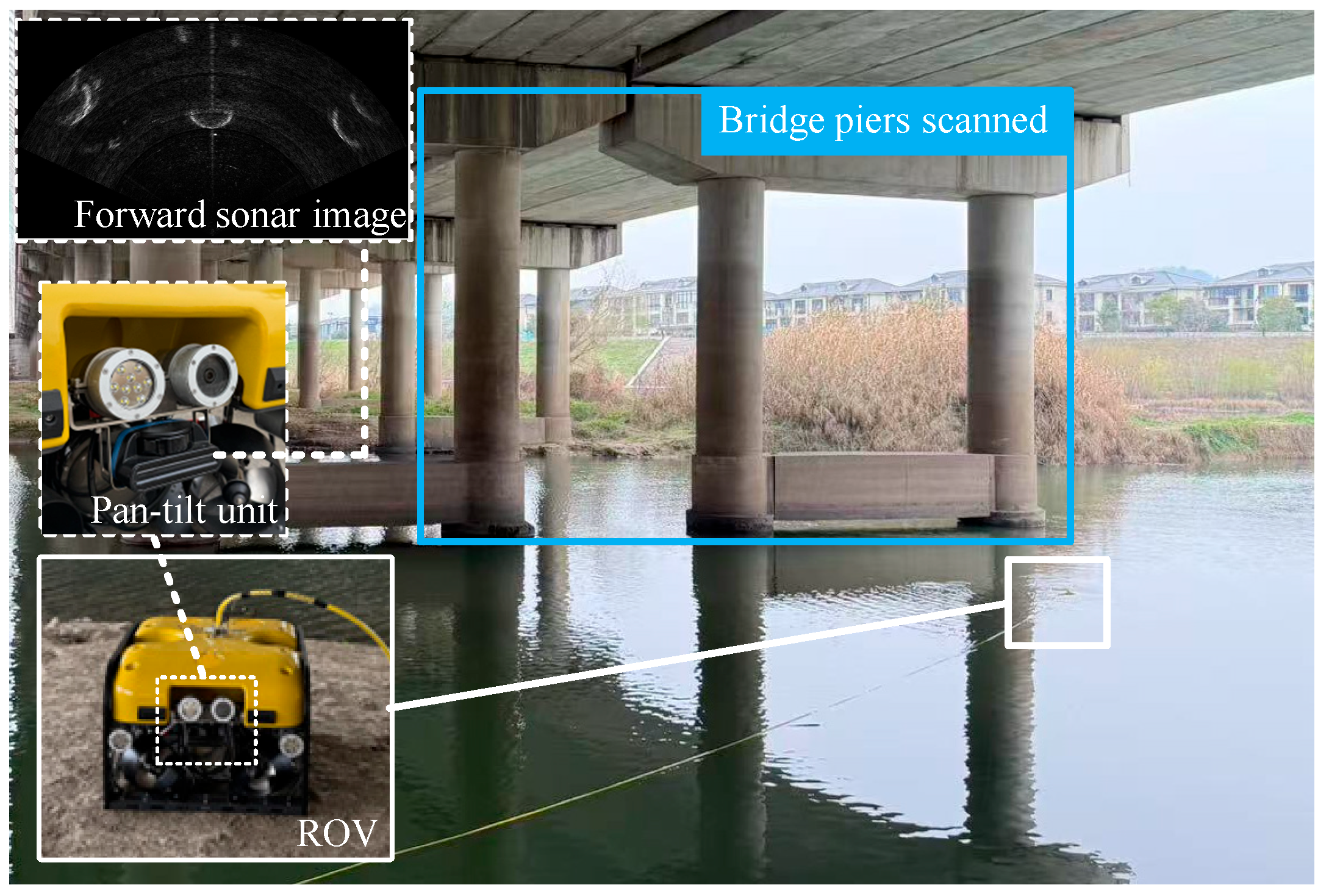
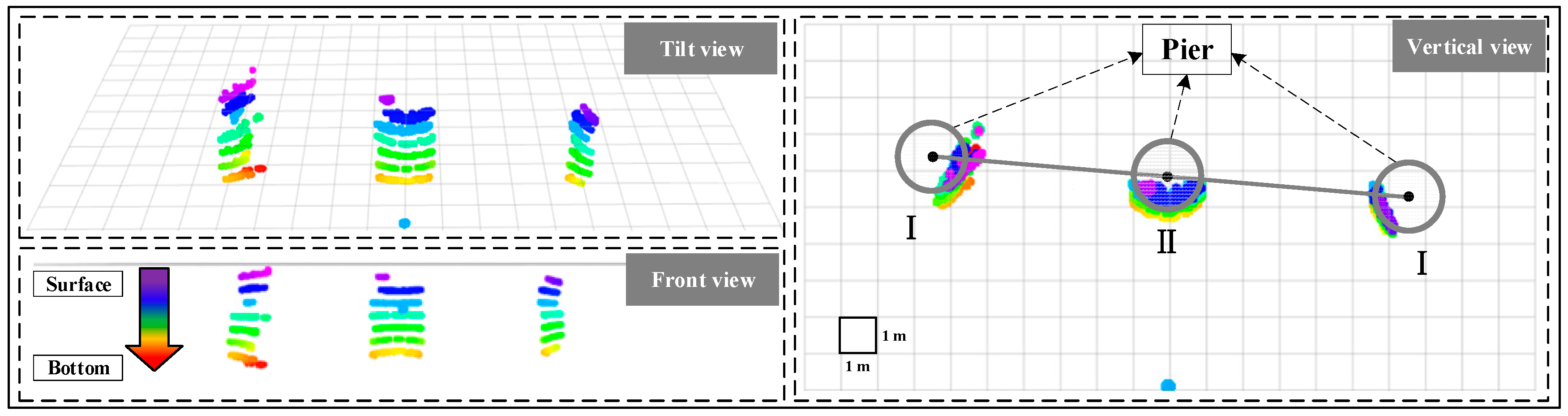
- Validated through outdoor bridge pier scanning experiments, the proposed method achieves a maximum measurement error of 0.203 m, enabling effective 3D reconstruction and mapping of underwater structures such as bridge piers.
- (4)
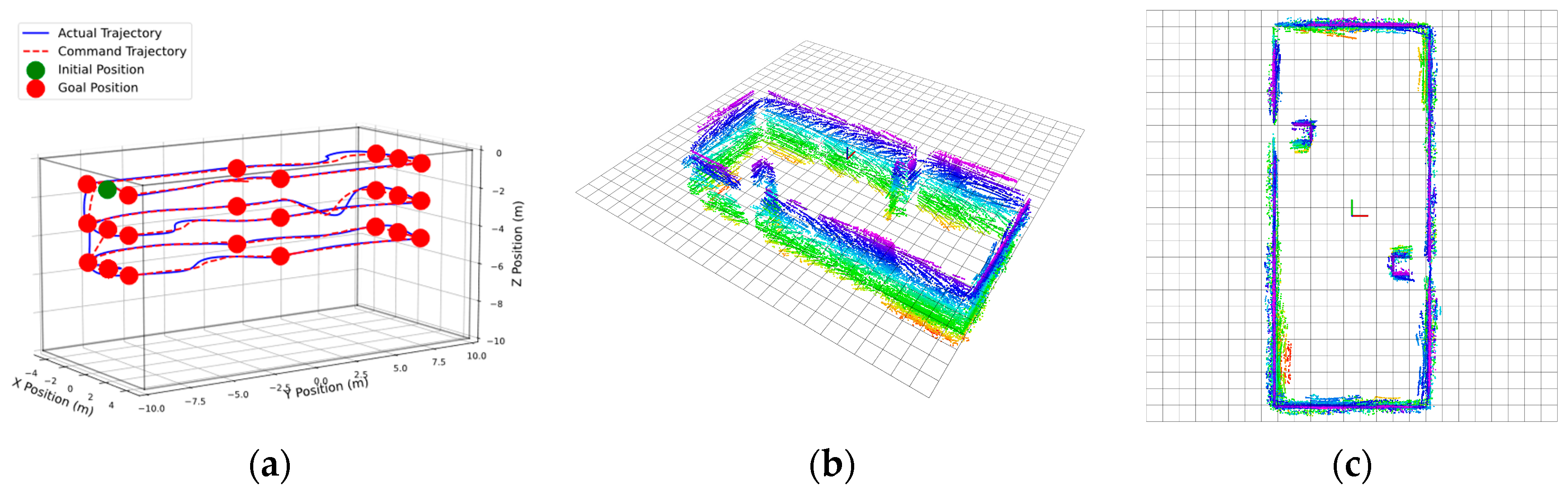
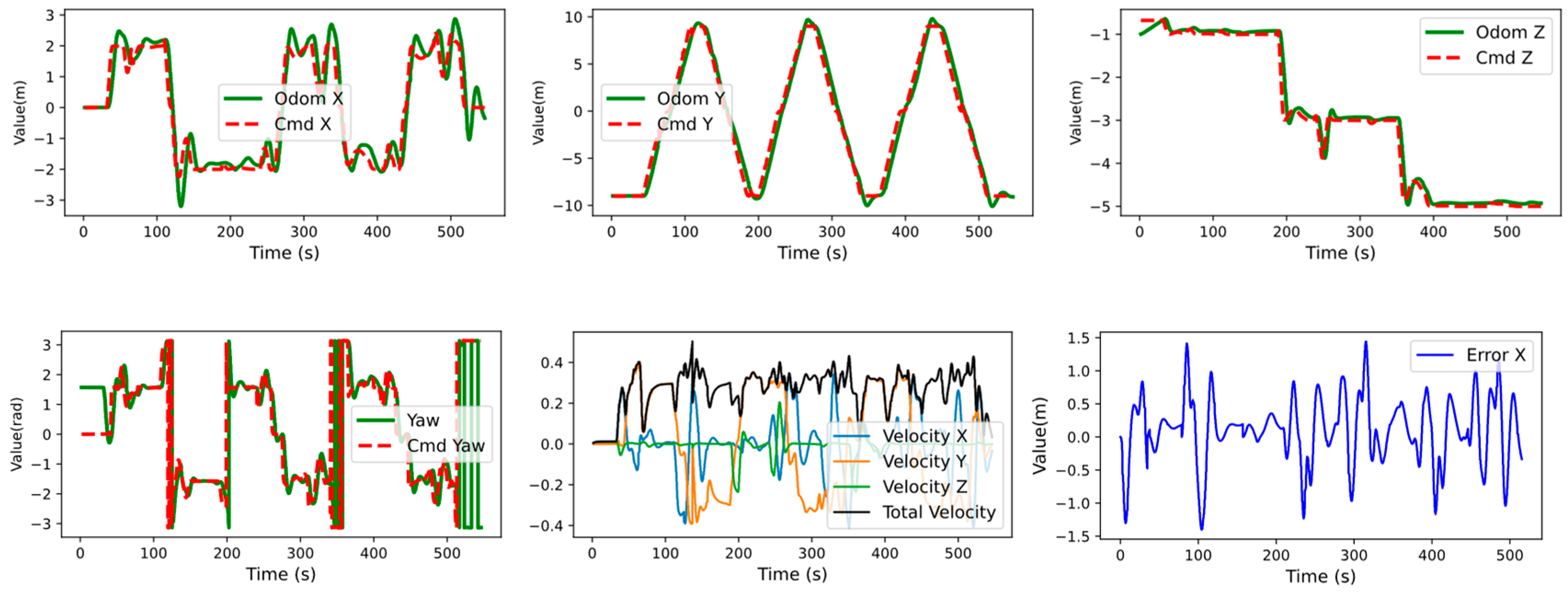
- Obstacle avoidance experiments conducted in the Gazebo simulation environment show that the 3D point cloud generated by the oscillatory forward-looking sonar provides effective environmental input for the Ego-Planner path planning algorithm, enabling autonomous obstacle avoidance and motion control for underwater vehicles.
- (5)
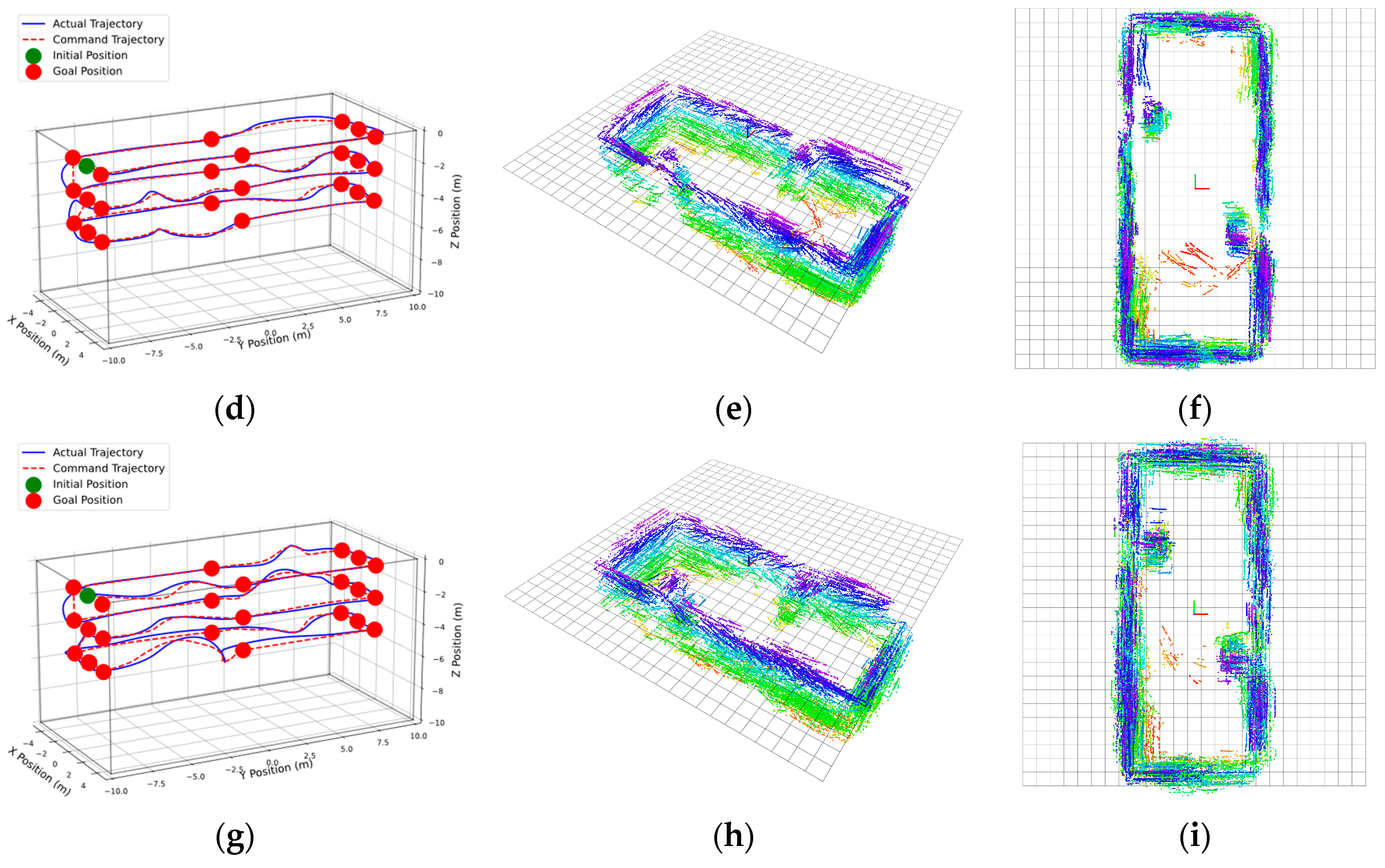
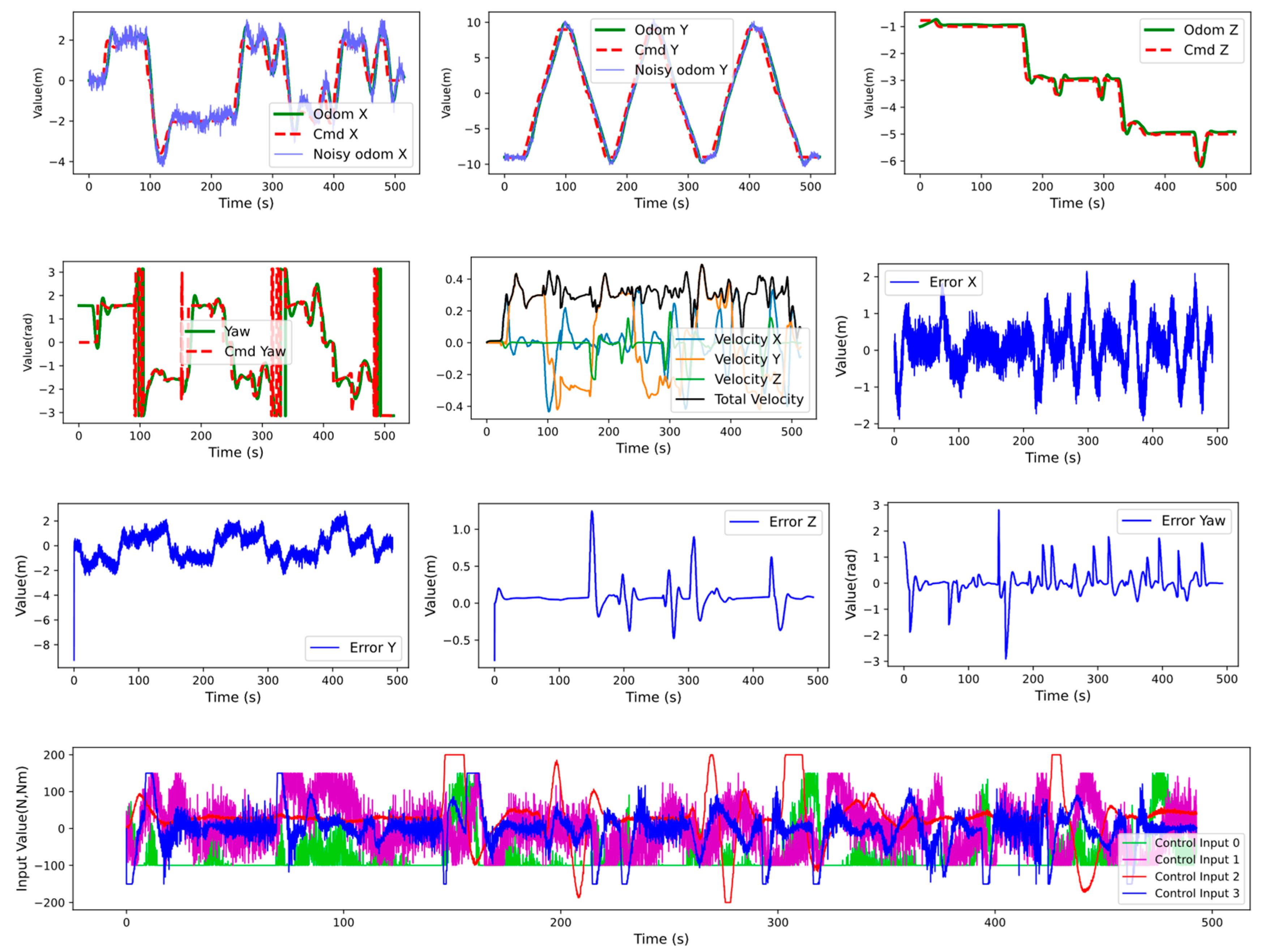
- The system demonstrates robustness to localisation errors, achieving obstacle avoidance success rates of 100%, 60%, and 30% under localisation errors of 0 m, 0.25 m, and 0.5 m, respectively.
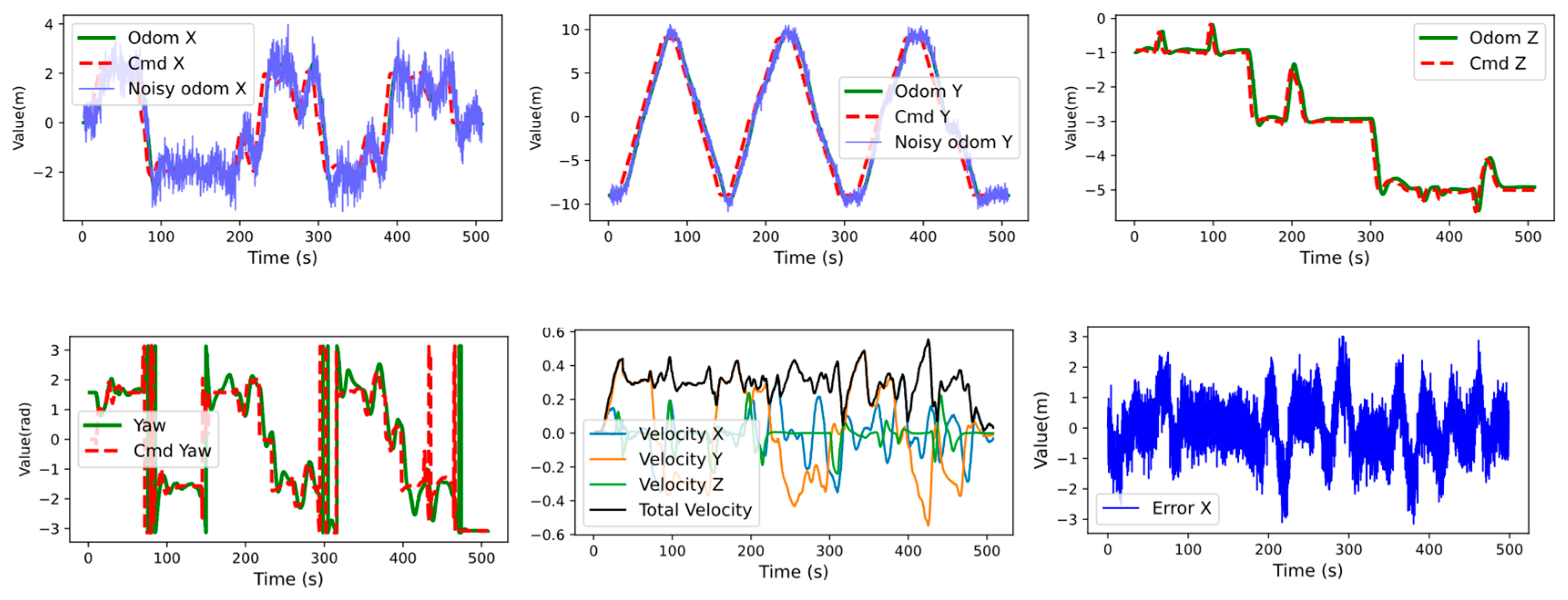
- (6)
- As localisation errors increase, control inputs exhibit significant oscillations, energy consumption rises, and obstacle avoidance success rates decline significantly, highlighting the strong dependence of system performance on localisation precision.
- (1)
- Point Cloud Registration: The current system relies on accurate pose information for point cloud integration. Future work will focus on advanced point cloud registration algorithms, such as Iterative Closest Point (ICP) and Normal Distributions Transform (NDT), to reduce dependence on external localisation systems. Considering the sparse and noisy characteristics of underwater sonar point cloud, the study will explore feature extraction and matching techniques tailored to underwater environments, with the goal of developing robust registration algorithms to enhance 3D reconstruction accuracy and reliability, particularly under low-precision localisation conditions.
- (2)
- Point Cloud Storage and Management: Efficient point cloud storage and management are critical for maintaining system performance. Future work will explore large-scale 3D environmental mapping, employing data structures such as KD trees, octrees, and voxel grids in underwater settings. It will also develop compression algorithms for sparse point clouds to reduce memory usage and computational overhead. Additionally, incremental environmental modelling methods will be investigated to enable real-time map updates and optimisation, supporting long-term, large-scale underwater autonomous operations while addressing the computational efficiency limitations of current systems.
- (3)
- Optimisation of the Model Predictive Control Algorithm: Continued tuning of MPC parameters aims to reduce motion oscillations and improve 3D reconstruction performance. In response to underwater disturbances such as currents and waves, the study will incorporate disturbance observers and compensation mechanisms into the MPC framework to enhance its robustness against environmental disturbances. In addition, learning-based MPC methods will be explored, leveraging historical control data to optimise prediction models and control parameters, thus laying the foundation for high-quality 3D environmental reconstruction.
- (4)
- Acoustic Modelling: Virtual simulation experiments are efficient for rapidly validating proposed methods. However, current simulation approaches do not fully capture acoustic characteristics. This represents a significant challenge in terms of both hardware performance and algorithmic complexity. Future work will explore efficient acoustic modelling methods to further enhance the fidelity of simulation experiments and improve the efficiency of algorithm development.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lin, M.; Yang, C. Ocean Observation Technologies: A Review. Chin. J. Mech. Eng. 2020, 33, 32. [Google Scholar] [CrossRef]
- Teng, S.; Liu, A.; Ye, X.; Wang, J.; Fu, J.; Wu, Z.; Chen, B.; Liu, C.; Zhou, H.; Zeng, Y.; et al. Review of Intelligent Detection and Health Assessment of Underwater Structures. Eng. Struct. 2024, 308, 117958. [Google Scholar] [CrossRef]
- Elmezain, M.; Saad Saoud, L.; Sultan, A.; Heshmat, M.; Seneviratne, L.; Hussain, I. Advancing Underwater Vision: A Survey of Deep Learning Models for Underwater Object Recognition and Tracking. IEEE Access 2025, 13, 17830–17867. [Google Scholar] [CrossRef]
- Rout, D.K.; Kapoor, M.; Subudhi, B.N.; Thangaraj, V.; Jakhetiya, V.; Bansal, A. Underwater Visual Surveillance: A Comprehensive Survey. Ocean. Eng. 2024, 309, 118367. [Google Scholar] [CrossRef]
- Tang, Z.; Lu, J.; Wang, Z.; Ma, G. Three Dimensional Height Information Reconstruction Based on Mobile Active Sonar Detection. Appl. Acoust. 2020, 169, 107459. [Google Scholar] [CrossRef]
- Sadjoli, N.; Yiyu, C.; Lee, G.S.G.; Elhadidi, B. Effectiveness of 3D PCD Reconstruction Using Orthogonal Multiple Sonar Fusion on Frame and Surface Type Objects. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022; pp. 1–6. [Google Scholar]
- Kim, B.; Kim, J.; Cho, H.; Kim, J.; Yu, S.-C. AUV-Based Multi-View Scanning Method for 3-D Reconstruction of Underwater Object Using Forward Scan Sonar. IEEE Sens. J. 2020, 20, 1592–1606. [Google Scholar] [CrossRef]
- Wu, H.; Chen, Y.; Yang, Q.; Yan, B.; Yang, X. A Review of Underwater Robot Localization in Confined Spaces. J. Mar. Sci. Eng. 2024, 12, 428. [Google Scholar] [CrossRef]
- Mu, X.; Yue, G.; Zhou, N.; Chen, C. Occupancy Grid-Based AUV SLAM Method with Forward-Looking Sonar. J. Mar. Sci. Eng. 2022, 10, 1056. [Google Scholar] [CrossRef]
- Wang, J.; Chen, F.; Huang, Y.; McConnell, J.; Shan, T.; Englot, B. Virtual Maps for Autonomous Exploration of Cluttered Underwater Environments. IEEE J. Ocean. Eng. 2022, 47, 916–935. [Google Scholar] [CrossRef]
- Cheng, C.; Wang, C.; Yang, D.; Liu, W.; Zhang, F. Underwater Localization and Mapping Based on Multi-Beam Forward Looking Sonar. Front. Neurorobot. 2022, 15, 801956. [Google Scholar] [CrossRef] [PubMed]
- Zhou, X.; Wang, Z.; Ye, H.; Xu, C.; Gao, F. EGO-Planner: An ESDF-Free Gradient-Based Local Planner for Quadrotors. IEEE Robot. Autom. Lett. 2021, 6, 478–485. [Google Scholar] [CrossRef]
- Li, W.; Zhang, X.; Wang, Y.; Xie, S. Comparison of Linear and Nonlinear Model Predictive Control in Path Following of Underactuated Unmanned Surface Vehicles. J. Mar. Sci. Eng. 2024, 12, 575. [Google Scholar] [CrossRef]
- Bashi, O.I.D.; Jameel, S.M.; Sabry, A.H. Trajectory Optimization to Minimize Fuel Usage for Positioning Guide by a Nonlinear Model Predictive Control for Underwater Robots. Ocean. Eng. 2024, 300, 117271. [Google Scholar] [CrossRef]
- Hu, Y.; Li, B.; Jiang, B.; Han, J.; Wen, C.-Y. Disturbance Observer-Based Model Predictive Control for an Unmanned Underwater Vehicle. J. Mar. Sci. Eng. 2024, 12, 94. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011; ISBN 978-1-119-99149-6. [Google Scholar]
- Choi, W.-S. Ray-Based Physical Modeling and Simulation of Multibeam Sonar for Underwater Robotics in ROS-Gazebo Framework. Sensors 2025, 25, 1516. [Google Scholar] [CrossRef] [PubMed]
- Choi, W.-S.; Olson, D.R.; Davis, D.; Zhang, M.; Racson, A.; Bingham, B.; McCarrin, M.; Vogt, C.; Herman, J. Physics-Based Modelling and Simulation of Multibeam Echosounder Perception for Autonomous Underwater Manipulation. Front. Robot. AI 2021, 8, 706646. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Degree of Freedom (DOF) | Displacement and Angles (Fixed Coordinate System) | Velocities and Angular Velocities (Motion Coordinate System) | Forces and Moments (Motion Coordinate System) |
|---|---|---|---|
| Surge | |||
| Sway | |||
| Heave | |||
| Roll | |||
| Pitch | |||
| Yaw |
| Item | Measured Values (m) | Estimated Values (m) | Error (m) | |||
|---|---|---|---|---|---|---|
| a | b | c | Average Value | |||
| Pier diameter | 1.981 | 1.961 | 1.978 | 1.973 | 2.112 | 0.139 |
| Distance between I and II | 6.231 | 6.115 | 6.187 | 6.178 | 6.300 | 0.122 |
| Distance between II and III | 6.658 | 6.736 | 6.712 | 6.702 | 6.499 | 0.203 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| m | 68 kg | Height | 0.55 m |
| Length | 0.61 m | g | 9.81 m/s2 |
| Width | 0.73 m | Net buoyancy | 0.20 kg |
| Parameter | Value (m) | Parameter | Value (m) |
|---|---|---|---|
| map_size_x | 30 | obstacles_inflation | 0.6 |
| map_size_y | 30 | local_map_margin | 10 |
| map_size_z | 15 | ground_height | −10 |
| max_vel | 0.45 | lambda_smooth | 1.0 |
| max_acc | 0.2 | lambda_collision | 0.7 |
| planning_horizon | 30 | lambda_feasibility | 0.1 |
| Parameter | Value |
|---|---|
| Prediction horizon length | 1 s |
| Number of steps | 100 |
| State weighting matrix | (200, 200, 300, 0, 0, 150, 0, 0, 0, 0, 0, 0) |
| Control weighting matrix | (0.008, 0.008, 0.001, 0.008) |
| Control input constraints (lower bound) | (−100, −100, −200, −150) |
| Control input constraints (upper bound) | (150, 150, 200, 150) |
| Numerical integration method | Explicit Runge–Kutta (ERK) |
| Nonlinear optimisation method | Real-time Sequential Quadratic Programming (SQP-RTI) |
| Standard Deviation | Success Rate |
|---|---|
| σ = 0 m | 100% |
| σ = 0.25 m | 60% |
| σ = 0.5 m | 30% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhi, H.; Zhou, Z.; Wu, H.; Chen, Z.; Tian, S.; Zhang, Y.; Ruan, Y. Oscillatory Forward-Looking Sonar Based 3D Reconstruction Method for Autonomous Underwater Vehicle Obstacle Avoidance. J. Mar. Sci. Eng. 2025, 13, 943. https://doi.org/10.3390/jmse13050943
Zhi H, Zhou Z, Wu H, Chen Z, Tian S, Zhang Y, Ruan Y. Oscillatory Forward-Looking Sonar Based 3D Reconstruction Method for Autonomous Underwater Vehicle Obstacle Avoidance. Journal of Marine Science and Engineering. 2025; 13(5):943. https://doi.org/10.3390/jmse13050943
Chicago/Turabian StyleZhi, Hui, Zhixin Zhou, Haiteng Wu, Zheng Chen, Shaohua Tian, Yujiong Zhang, and Yongwei Ruan. 2025. "Oscillatory Forward-Looking Sonar Based 3D Reconstruction Method for Autonomous Underwater Vehicle Obstacle Avoidance" Journal of Marine Science and Engineering 13, no. 5: 943. https://doi.org/10.3390/jmse13050943
APA StyleZhi, H., Zhou, Z., Wu, H., Chen, Z., Tian, S., Zhang, Y., & Ruan, Y. (2025). Oscillatory Forward-Looking Sonar Based 3D Reconstruction Method for Autonomous Underwater Vehicle Obstacle Avoidance. Journal of Marine Science and Engineering, 13(5), 943. https://doi.org/10.3390/jmse13050943