
Improved Snake Optimization and Particle Swarm Fusion Algorithm Based on AUV Global Path Planning

Abstract
1. Introduction
2. Problem Formulation
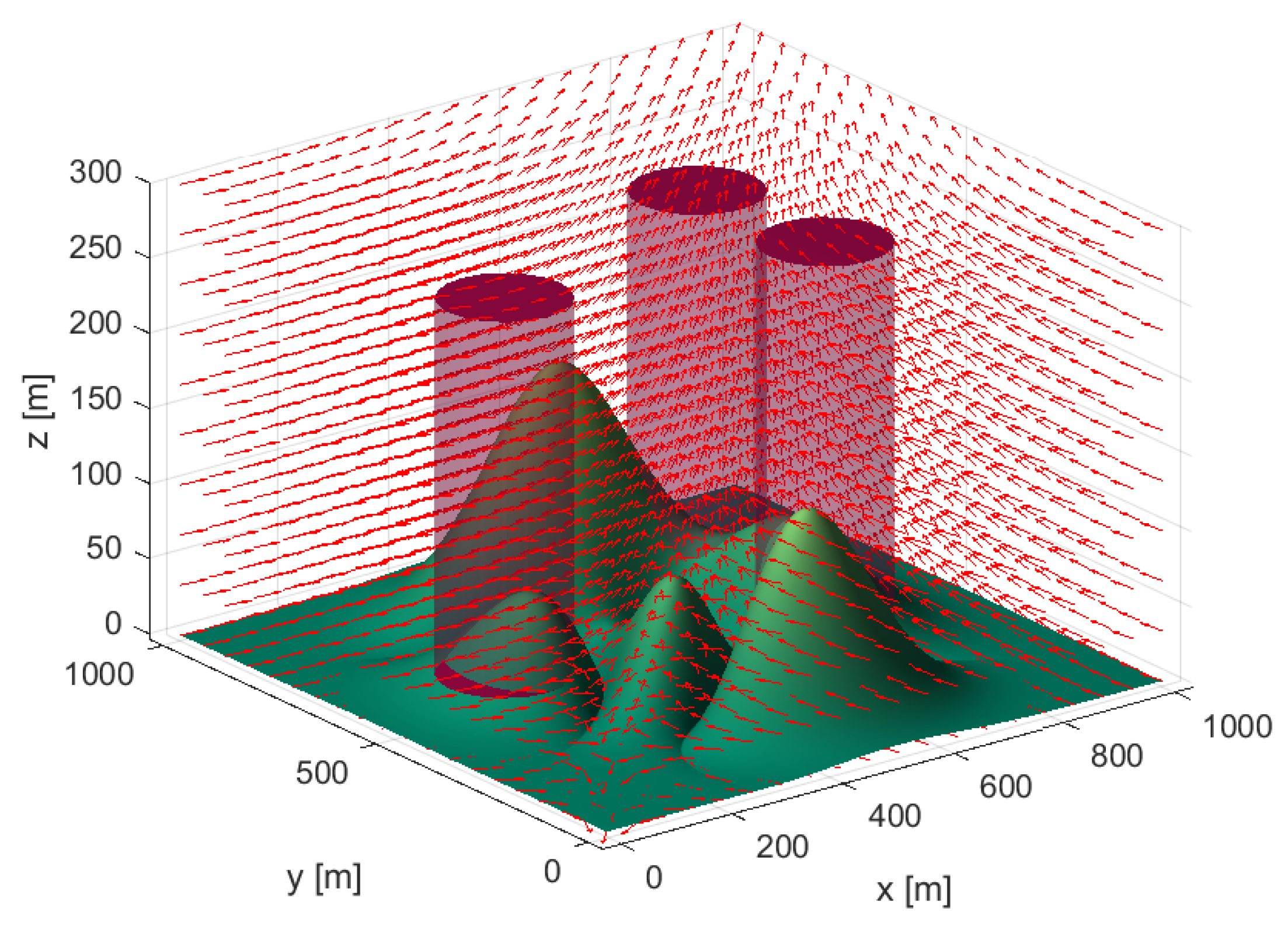
2.1. Modeling of the Underwater Environment in Three Dimensions
2.2. Ocean Current Model
3. Objective Function
3.1. Distance Cost
3.2. Path Threat Constraint Cost
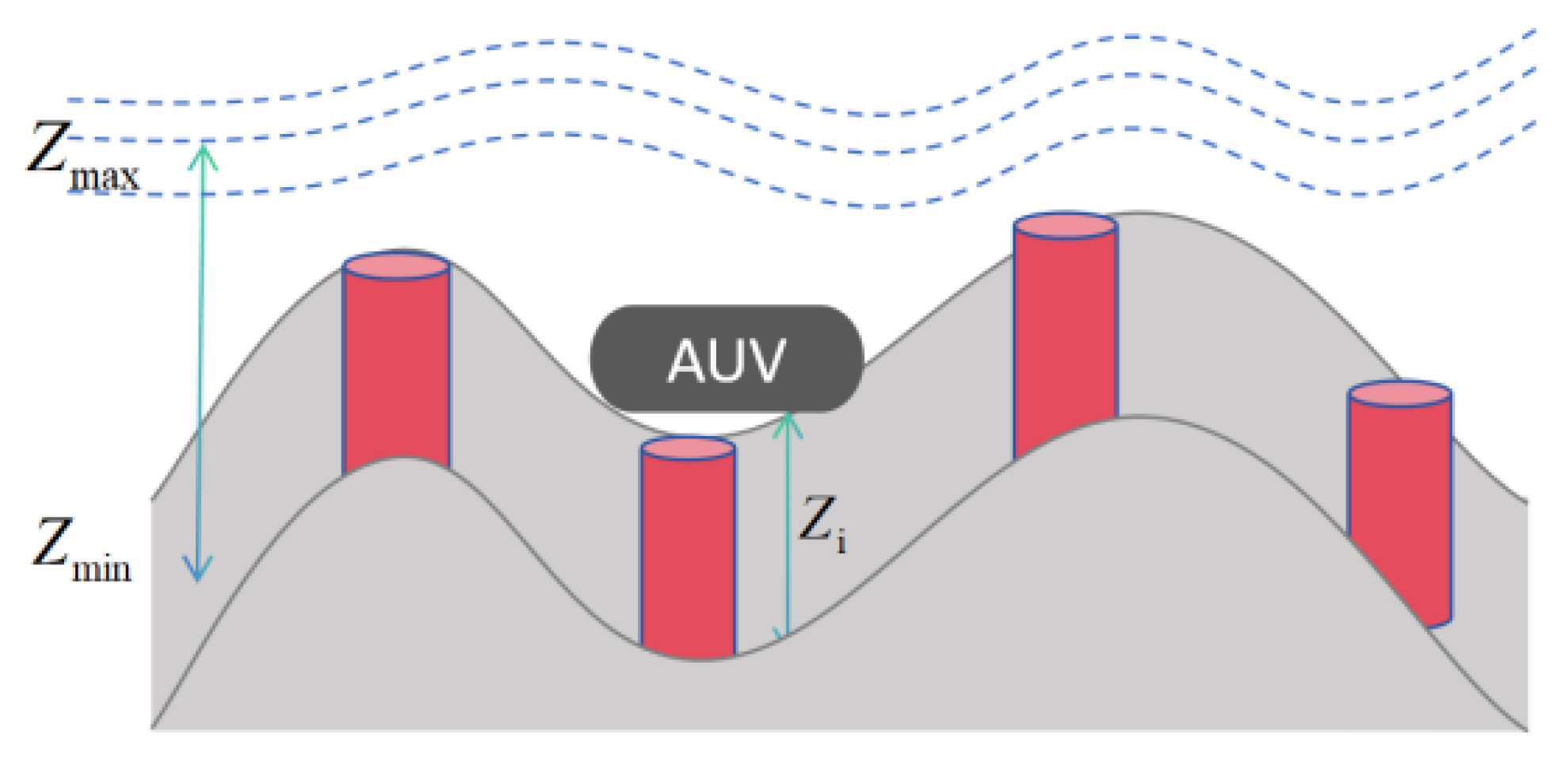
3.3. Altitude Constraint Cost
3.4. Current Constraint Cost
4. AUV Path Planning Based on ISO Algorithm
4.1. Snake Optimizer
4.2. Improved Snake Algorithm
4.2.1. The Good Point Set Population Initialization
4.2.2. Fusion Particle Swarm Algorithm
4.2.3. Cauchy Variation Strategy
4.3. Improved Snake Algorithm Implementation Flow
| Algorithm 1: Improved snake algorithm pseudo-code (ISO). |
| STEP1. Modeling of obstacles, currents, and seabed. |
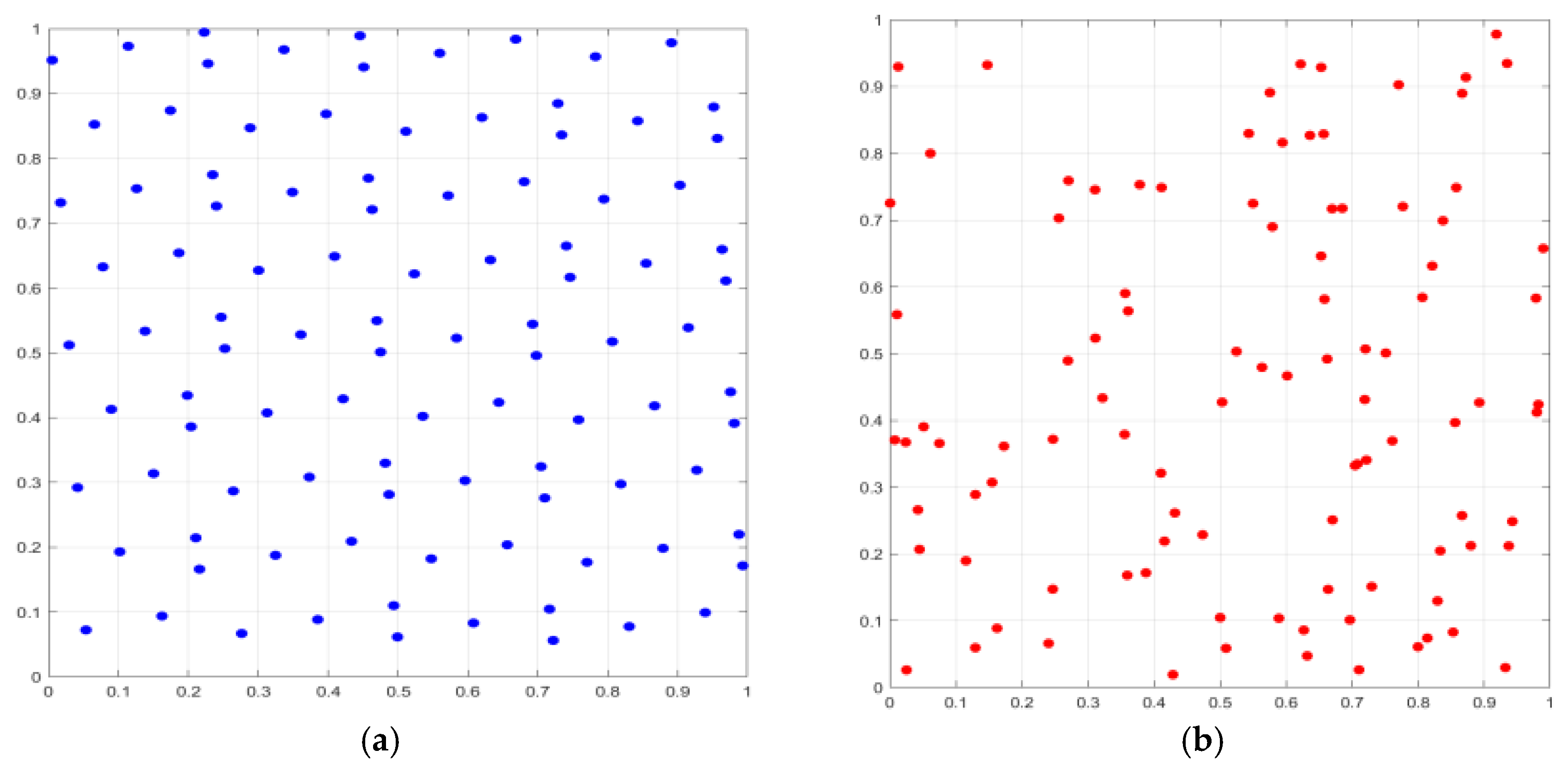
| STEP2. Using Equation (24), the population is initialized using the set of good points to generate N snakes (this strategy ensures that the initial solutions are uniformly distributed in the search space (Figure 3 compares the experiments), avoids the local aggregation problem caused by traditional random initialization, and lays the foundation for global convergence), 50% male and 50% female, to calculate the individual fitness as well as the best fitness of the male and female populations. |
| STEP3. While (t < T) do |
| STEP4. Evaluate each group and |
| STEP5. The best female and male individuals |
| STEP6. Use Equation (13) to define , |
| STEP7. If (Q < 0.25) |
| Perform food search mode using Equations (26) and (27) |
| Else if (Q > 0.6) |
| Use Equation (16) to perform the movement to food mode |
| Else |
| If () |
| Use Equation (29) to enter battle mode (the Cauchy variation strategy provides non-zero probability of jumping out of the local optimum through a heavy-tailed distribution) |
| Else |
| Use Equations (19) and (20) to enter mating mode |
| Using Equation (21) to change the position of the worst male and female snakes |
| End if |
| End if |
| End while |
| STEP8. Output optimal path |
5. Simulation Experiment and Discussion
5.1. Hardware and Software Configuration
5.2. Simulation Parameter Set
5.3. Analysis of Simulation Results
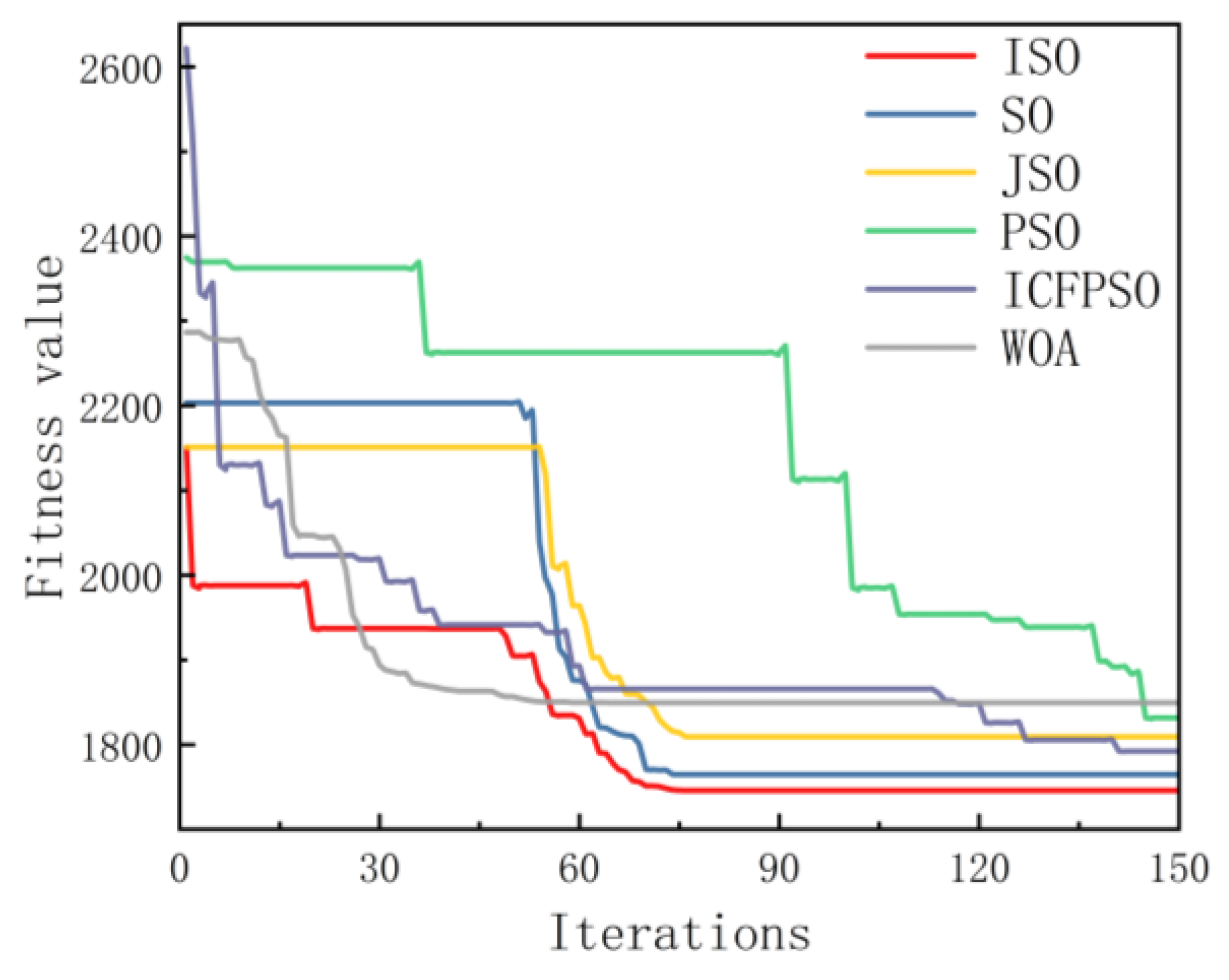
5.3.1. Simulation and Analysis in a Simple Underwater Environment
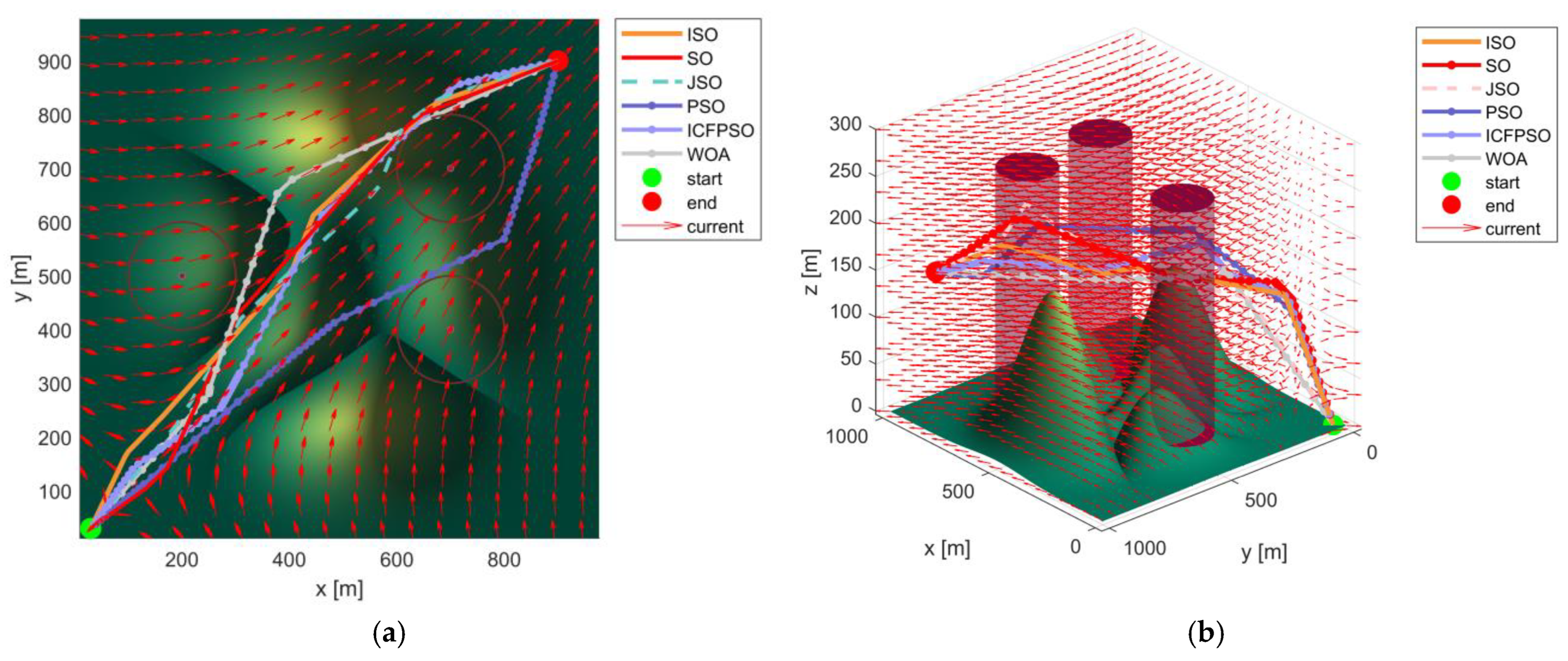
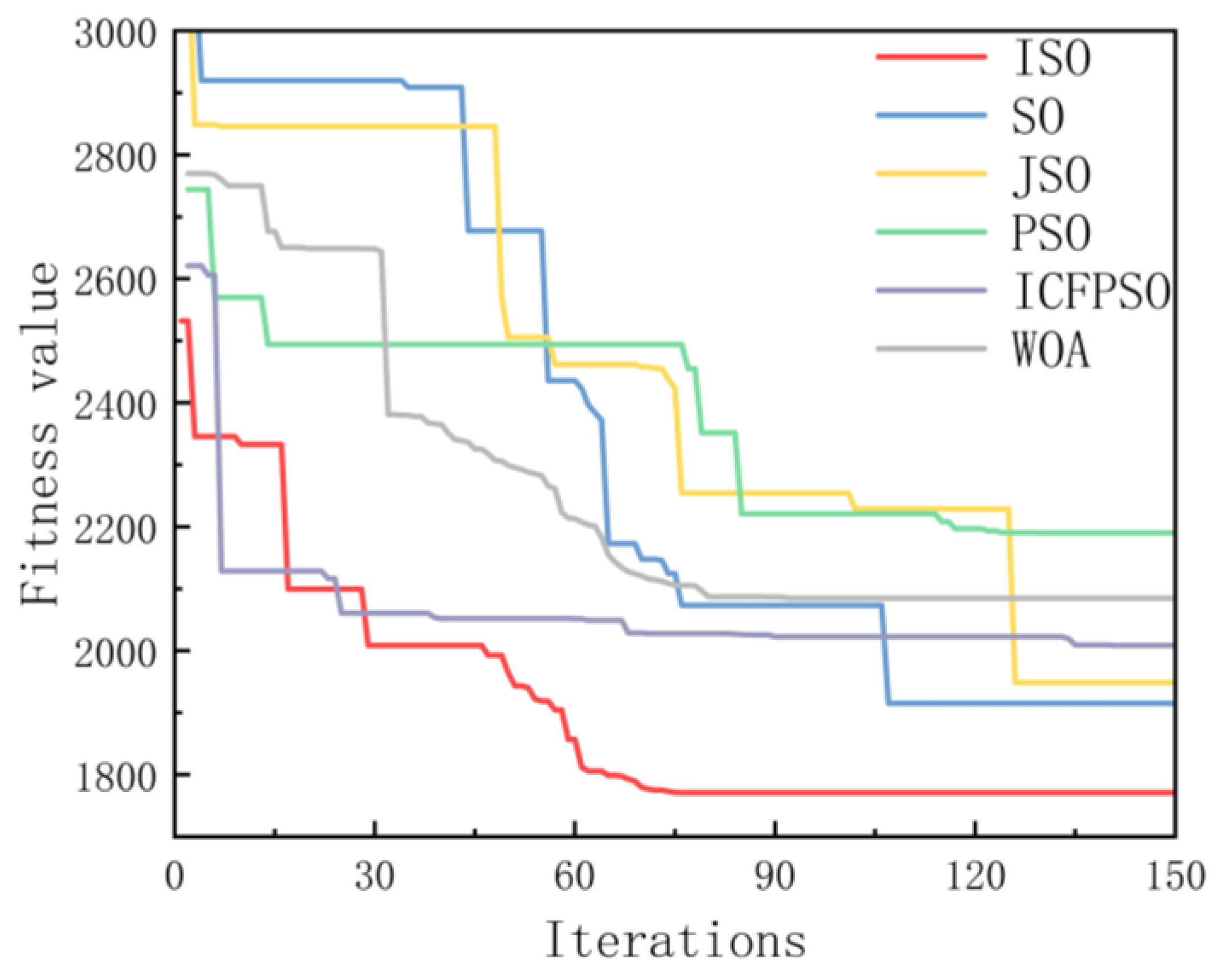
5.3.2. Simulation Analysis in Complex Environments
5.4. Comparison of Path Performance Indicators
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hwang, J.; Bose, N.; Fan, S. AUV Adaptive Sampling Methods: A Review. Appl. Sci. 2019, 9, 3145. [Google Scholar] [CrossRef]
- Wang, C.; Mei, D.; Wang, Y.; Yu, X.; Sun, W.; Wang, D.; Chen, J. Task Allocation for Multi-AUV System: A Review. Ocean Eng. 2022, 266, 112911. [Google Scholar] [CrossRef]
- Cheng, C.; Sha, Q.; He, B.; Li, G. Path Planning and Obstacle Avoidance for AUV: A Review. Ocean Eng. 2021, 235, 109355. [Google Scholar] [CrossRef]
- Kulkarni, C.S. Three-Dimensional Time-Optimal Path Planning in Dynamic and Realistic Environments; Massachusetts Institute of Technology: Cambridge, MA, USA, 2017. [Google Scholar]
- Hai-Feng, J.; Yu, C.; Wei, D.; Shuo, P. Underwater Chemical Plume Tracing Based on Partially Observable Markov Decision Process. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419831874. [Google Scholar] [CrossRef]
- Taheri, E.; Ferdowsi, M.H.; Danesh, M. Closed-Loop Randomized Kinodynamic Path Planning for an Autonomous Underwater Vehicle. Appl. Ocean Res. 2019, 83, 48–64. [Google Scholar] [CrossRef]
- Yan, S.; Pan, F. Research on Route Planning of AUV Based on Genetic Algorithms; IEEE: Piscataway, NJ, USA, 2019; pp. 184–187. [Google Scholar]
- MahmoudZadeh, S.; Powers, D.M.; Yazdani, A.M.; Sammut, K.; Atyabi, A. Efficient AUV Path Planning in Time-Variant Underwater Environment Using Differential Evolution Algorithm. J. Mar. Sci. Appl. 2018, 17, 585–591. [Google Scholar] [CrossRef]
- Lim, H.S.; Fan, S.; Chin, C.; Chai, S.; Bose, N. Particle Swarm Optimization Algorithms with Selective Differential Evolution for AUV Path Planning. Int. J. Robot. Autom. 2020, 9, 94–112. [Google Scholar] [CrossRef]
- Che, G.; Liu, L.; Yu, Z. An Improved Ant Colony Optimization Algorithm Based on Particle Swarm Optimization Algorithm for Path Planning of Autonomous Underwater Vehicle. J. Ambient Intell. Humaniz. Comput. 2020, 11, 3349–3354. [Google Scholar] [CrossRef]
- Cao, X.; Sun, H.; Guo, L. Potential Field Hierarchical Reinforcement Learning Approach for Target Search by Multi-AUV in 3-D Underwater Environments. Int. J. Control 2020, 93, 1677–1683. [Google Scholar] [CrossRef]
- Havenstrøm, S.T.; Rasheed, A.; San, O. Deep Reinforcement Learning Controller for 3D Path Following and Collision Avoidance by Autonomous Underwater Vehicles. Front. Robot. AI 2021, 7, 566037. [Google Scholar] [CrossRef] [PubMed]
- Liang, Z.; Qu, X.; Zhang, Z.; Chen, C. Three-Dimensional Path-Following Control of an Autonomous Underwater Vehicle Based on Deep Reinforcement Learning. Pol. Marit. Res. 2022, 29, 36–44. [Google Scholar] [CrossRef]
- MathWorks, MATLAB; Version R2021b; The MathWorks, Inc.: Natick, MA, USA, 2021.
- Garau, B.; Alvarez, A.; Oliver, G. AUV Navigation Through Turbulent Ocean Environments Supported by Onboard H-ADCP; IEEE: Piscataway, NJ, USA, 2006; pp. 3556–3561. [Google Scholar]
- Zhang, S.; Nie, Y.; Wang, S.; Zhang, X.; Wu, Q.; Wang, T. 3-D Path Planning for AUVs Based on Improved Exponential Distribution Optimizer. IEEE Internet Things J. 2024, 11, 28667–28679. [Google Scholar] [CrossRef]
- Sun, Y.; Luo, X.; Ran, X.; Zhang, G. A 2D Optimal Path Planning Algorithm for Autonomous Underwater Vehicle Driving in Unknown Underwater Canyons. J. Mar. Sci. Eng. 2021, 9, 252. [Google Scholar] [CrossRef]
- Mu, X.; Gao, W. Coverage Path Planning for Multi-AUV Considering Ocean Currents and Sonar Performance. Front. Mar. Sci. 2025, 11, 1483122. [Google Scholar] [CrossRef]
- Li, X.; Yu, S. Three-Dimensional Path Planning for AUVs in Ocean Currents Environment Based on an Improved Compression Factor Particle Swarm Optimization Algorithm. Ocean Eng. 2023, 280, 114610. [Google Scholar] [CrossRef]
- Hashim, F.A.; Hussien, A.G. Snake Optimizer: A Novel Meta-Heuristic Optimization Algorithm. Knowl.-Based Syst. 2022, 242, 108320. [Google Scholar] [CrossRef]
- Marini, F.; Walczak, B. Particle Swarm Optimization (PSO). A Tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]
- Yanan, L.; Haibin, H.; Liangming, C.; Yufei, Z.; Xiaoli, W. Energy-Optimal Three-Dimensional Path Planning for AUV under Changing Ocean Current Environment. Syst. Eng. Electron. 2021, 43, 3667. [Google Scholar]
- Zhou, H.; Wang, H. Research on Path Planning of Unmanned Underwater Vehicle for Long-Duration Missions Based on Energy Consumption Optimization in Complex Ocean Environments; Harbin Engineering University: Harbin, China, 2017. [Google Scholar]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameter |
|---|---|
| ISO | [20] ; [21] |
| JSO | ; [20] |
| SO | ; [20] |
| PSO | [21] |
| ICFPSO | [19] |
| WOA | [24] |
| Obstacle | X-Axis | Y-Axis | Z-Axis | R-Radius |
|---|---|---|---|---|
| 1 | 200 | 500 | 250 | 100 |
| 2 | 700 | 700 | 250 | 100 |
| 3 | 700 | 400 | 250 | 100 |
| Obstacle | X-Axis | Y-Axis | Z-Axis | R-Radius |
|---|---|---|---|---|
| 1 | 200 | 450 | 250 | 80 |
| 2 | 300 | 700 | 250 | 80 |
| 3 | 350 | 200 | 250 | 80 |
| 4 | 500 | 350 | 250 | 80 |
| 5 | 600 | 200 | 250 | 80 |
| 6 | 650 | 750 | 250 | 80 |
| 7 | 700 | 550 | 250 | 80 |
| Algorithm | Iteration | Optimal Fitness Value | Bad Fitness Value | Average Fitness Value | Standard Deviation |
|---|---|---|---|---|---|
| ISO | 74 | 1746.0071 | 1851.4202 | 1782.7790 | 25.0002 |
| SO | 74 | 1764.6845 | 2026.2010 | 1912.3748 | 88.8609 |
| JSO | 76 | 1809.4664 | 1951.4591 | 1860.2239 | 38.3603 |
| PSO | 145 | 1831.6363 | 2290.7304 | 1999.8093 | 119.2672 |
| ICFPSO | 141 | 1792.0699 | 2286.7562 | 1961.4648 | 123.5316 |
| WOA | 84 | 1849.3287 | 2291.2009 | 2014.4558 | 103.2262 |
| Algorithm | Iteration | Optimal Fitness Value | Bad Fitness Value | Average Fitness Value | Standard Deviation |
|---|---|---|---|---|---|
| ISO | 74 | 1771.1727 | 2140.1336 | 1987.4769 | 83.4097 |
| SO | 107 | 1915.0162 | 2494.3869 | 2186.5361 | 121.6212 |
| JSO | 126 | 1948.7345 | 2474.9318 | 2165.5661 | 145.8995 |
| PSO | 144 | 2189.8619 | 3067.4882 | 2557.2128 | 257.9741 |
| ICFPSO | 141 | 2008.7076 | 3031.5748 | 2371.4958 | 240.4899 |
| WOA | 115 | 2084.6708 | 3091.9430 | 2438.1219 | 242.4011 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, H.; Kuang, X. Improved Snake Optimization and Particle Swarm Fusion Algorithm Based on AUV Global Path Planning. J. Mar. Sci. Eng. 2025, 13, 796. https://doi.org/10.3390/jmse13040796
Jiang H, Kuang X. Improved Snake Optimization and Particle Swarm Fusion Algorithm Based on AUV Global Path Planning. Journal of Marine Science and Engineering. 2025; 13(4):796. https://doi.org/10.3390/jmse13040796
Chicago/Turabian StyleJiang, Haobo, and Xinghong Kuang. 2025. "Improved Snake Optimization and Particle Swarm Fusion Algorithm Based on AUV Global Path Planning" Journal of Marine Science and Engineering 13, no. 4: 796. https://doi.org/10.3390/jmse13040796
APA StyleJiang, H., & Kuang, X. (2025). Improved Snake Optimization and Particle Swarm Fusion Algorithm Based on AUV Global Path Planning. Journal of Marine Science and Engineering, 13(4), 796. https://doi.org/10.3390/jmse13040796