With the continuous expansion of global trade and the growth of maritime transport [
1], the safe navigation of ships has become particularly important [
2]. Rough sea conditions such as high winds and waves pose greater challenges to the safe navigation of ships, making it extremely difficult to maintain a predetermined course. Scholars have studied the control of ship movements and unmanned vessels in rough seas [
3,
4]. However, in high winds and waves, ships not only need to steer frequently but sometimes even use large rudder angles to maintain stable navigation [
5]. Therefore, the precise course control of ships is crucial for the economic and safe operation of ships, as well as for achieving effective motion control. While achieving precise control, it is also possible to reduce energy consumption [
6,
7].
Therefore, some scholars have explored and researched the problem of course-keeping control. Deng et al., in [
8], proposed a model-based event-triggered control approach to track the activities of under-actuated surface ships to effectively control the closed-loop system. The method maximizes the reduction of learning parameters while achieving the tracking control of under-actuated surface vessels. Zhao et al., in [
9], proposed a novel path-following control algorithm for surface vessels based on global course constraint (GCC) for the first time, and the path-following control algorithm takes the global course constraint as the goal. Min et al. in [
10] suggested a second-order CGSA (closed-loop gain-shaping algorithm). First, a linear controller is designed using a second-order closed-loop gain-shaping algorithm. Then, the nonlinear modification technique is used to realize the final control law. The algorithm uses nonlinear modifications to reduce the rudder angle and steering frequency, providing innovative ideas for ship energy efficiency and environmental sustainability. Du et al., in [
11], suggested a technique that integrates the Nussbaum gain function with a dynamic surface to address the challenge of maintaining the course under unknown control direction conditions, thereby enhancing the ship’s course control capability. Ren, in [
12], proposed a method that uses T-S fuzzy approximation to handle uncertain ship dynamics and command filtering to simplify backstepping control for the ship course-keeping problem. Wang et al., in [
13], proposed a CFD-based method, using naoe-FOAM-SJTU with an overset grid and a newly developed feedback controller, to simulate the free-running ONR Tumblehome ship model under course-keeping control in waves, addressing the problem of accurately predicting ship behavior in complex hydrodynamic conditions. Tuo et al., in [
14], introduced a reliability-centered fixed-time non-singular terminal sliding mode control approach for the dynamic orientation of moored ships under conditions of uncertainties and unknown interferences. Zhang et al., in [
15], designed an enhanced multiplicative event-triggered condition with a succinct estimation model, investigating the utilization of the multiplicative event-triggered mechanism for achieving a robust adaptive fault tolerance mechanism for unmanned surface vessels. Acanfora et al., in [
16], proposed a method suitable for oceangoing ships, providing an autonomous routine for the avoidance of two dangerous phenomena involving excessive motions of the ship, e.g., the synchronous roll and the parametric resonance, both taking place in rough seas. Chen et al., in [
17], proposed a method to generate information on ocean winds, wind-induced waves, and the strong Kuroshio western boundary current through modern weather and ocean models and then provide this information to ship maneuvering models to construct a numerical ship’s navigation system. Islam et al., in [
18], proposed robust integral backstepping, synergetic, and terminal synergetic controllers for good course-keeping performance and reducing the energy consumption in course-keeping control for ships.
Most of the above studies focus on nonlinear modification technology and nonlinear feedback technology [
19,
20], as well as energy consumption and course-keeping under normal sea conditions [
21,
22]. However, when ships navigate in rough seas, the impact of high winds and waves can significantly reduce rudder effectiveness, severely affecting navigation stability and the effectiveness of course-keeping. Therefore, how to ensure safe and stable navigation through effective course control technology in rough seas remains a key issue in maritime technology research [
23].
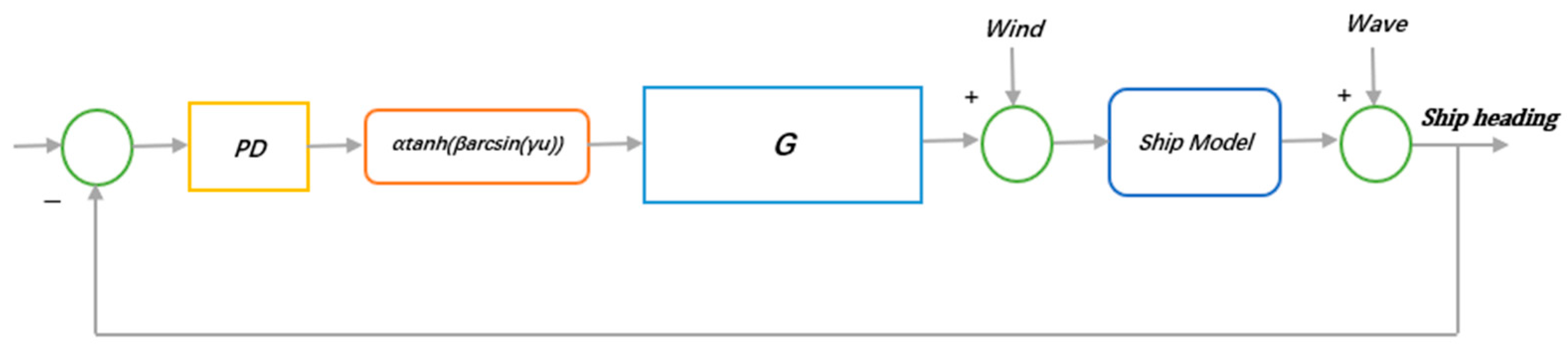
In this paper, the nonlinear composite function is integrated in series between the PD controller and the second-order oscillation link to propose a simple and robust control mechanism. Through comprehensive theoretical analysis and simulation experiments under different models, the effectiveness of the proposed controller is rigorously verified. The innovations presented in this paper can be summarized as follows:
The rest of this article is below.
Section 2 describes the establishment of two mathematical models of ship motion: the Nomoto model and the Norrbin model. In
Section 3, a controller based on a closed-loop gain-shaping algorithm is designed, and then a nonlinear composite function is embedded between the PD controller and the second-order oscillation link to improve, and the stability of the controller and the robustness of the system are demonstrated. Simulation experiments are carried out in
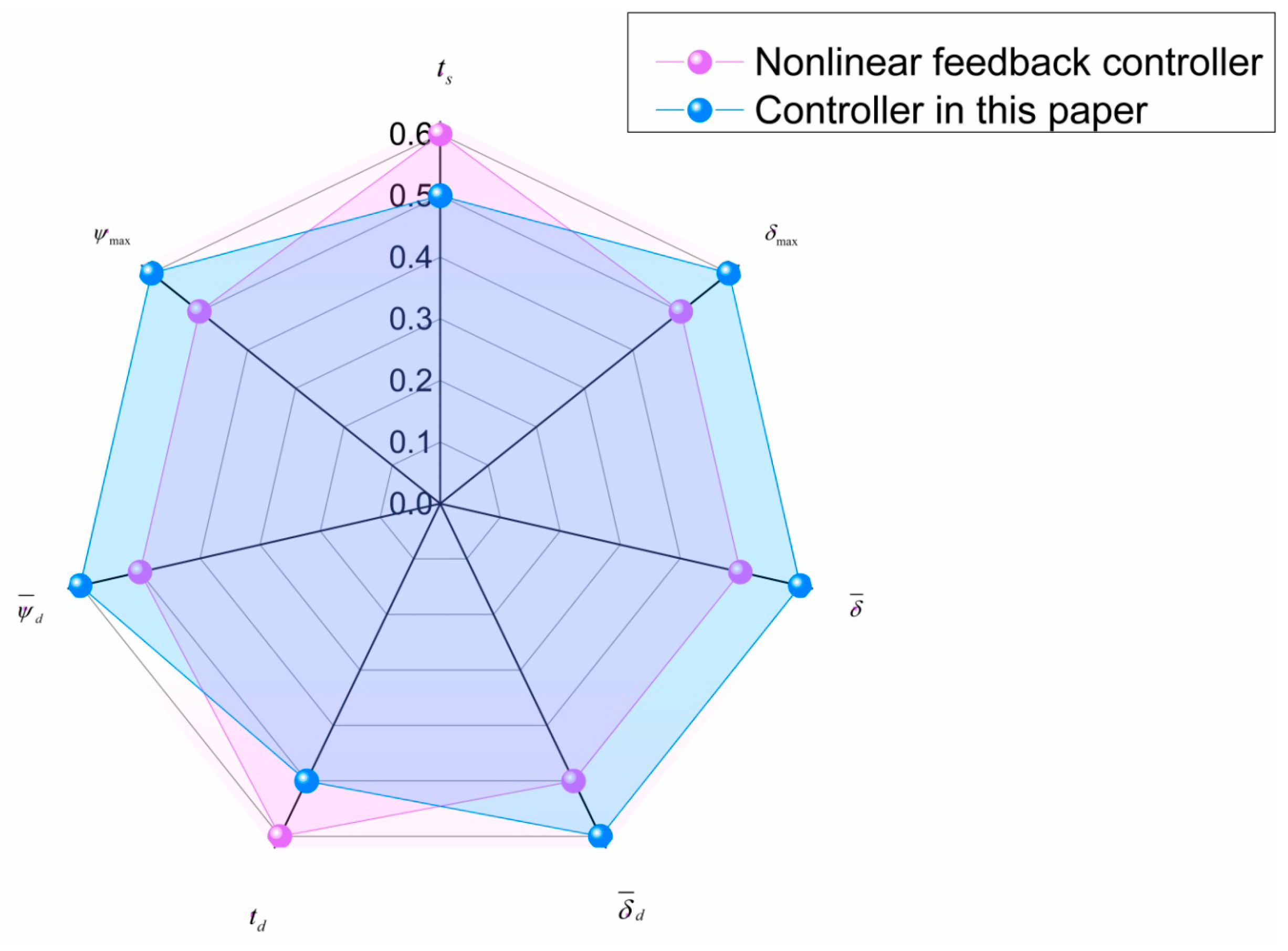
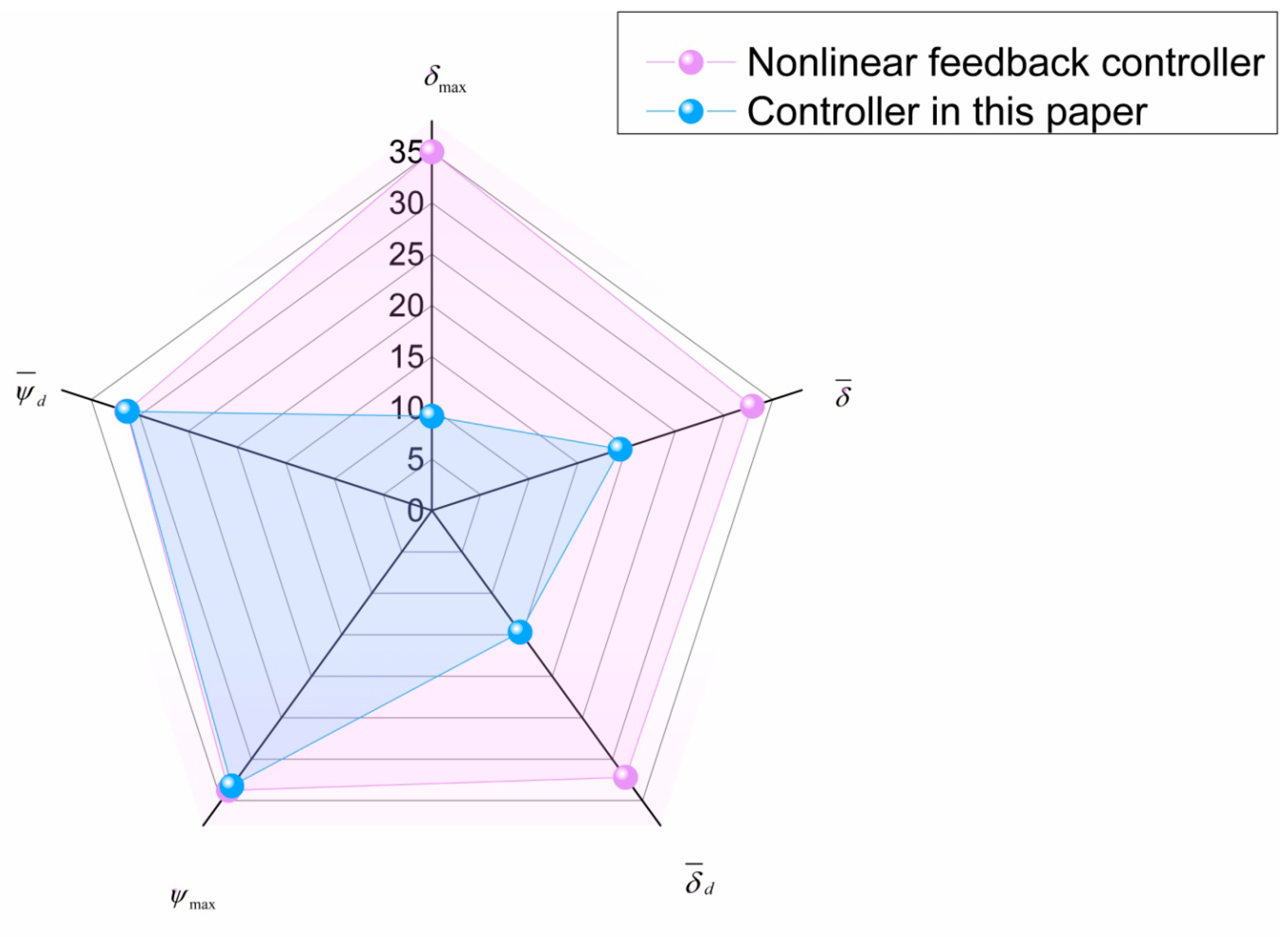
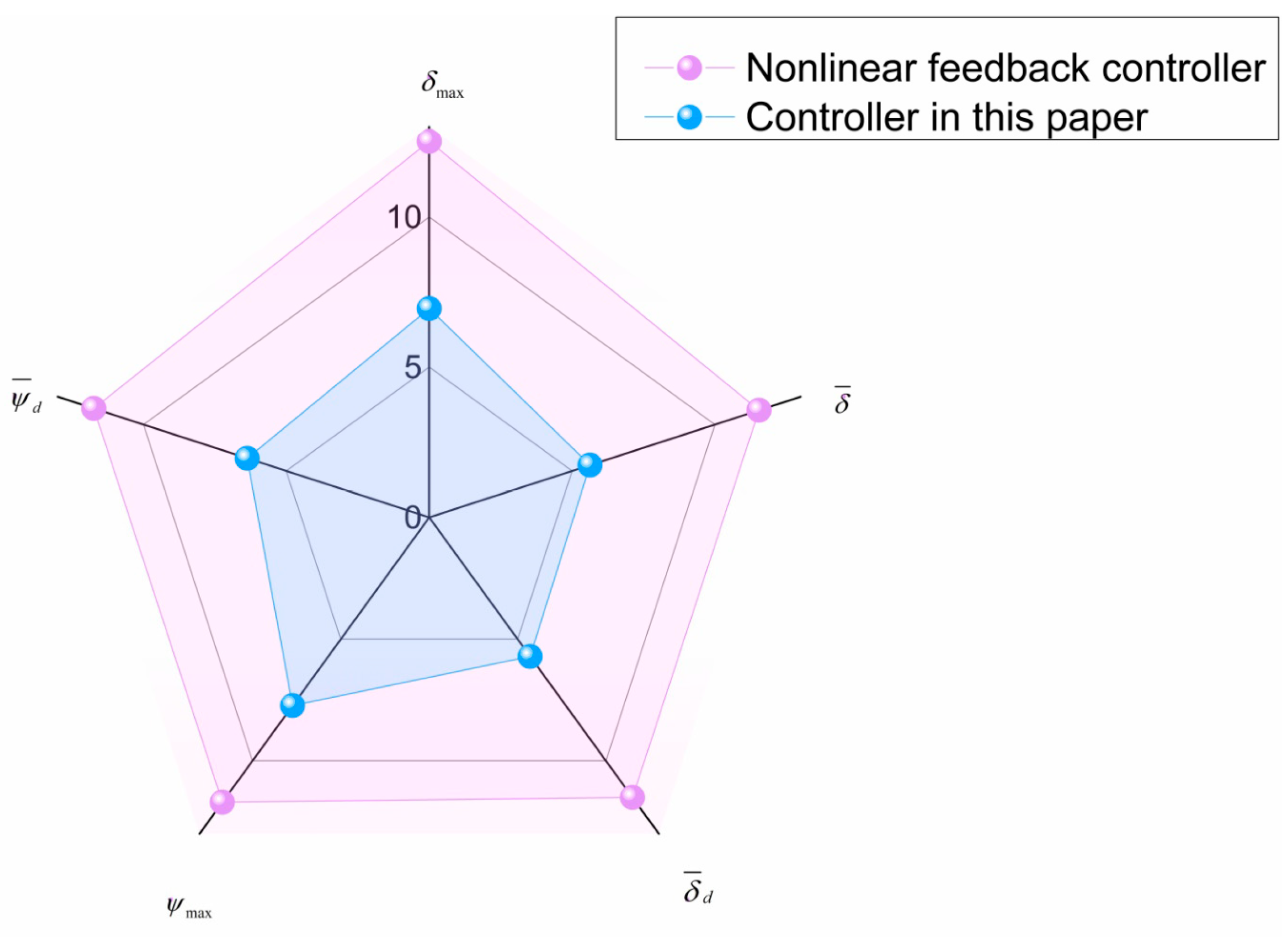
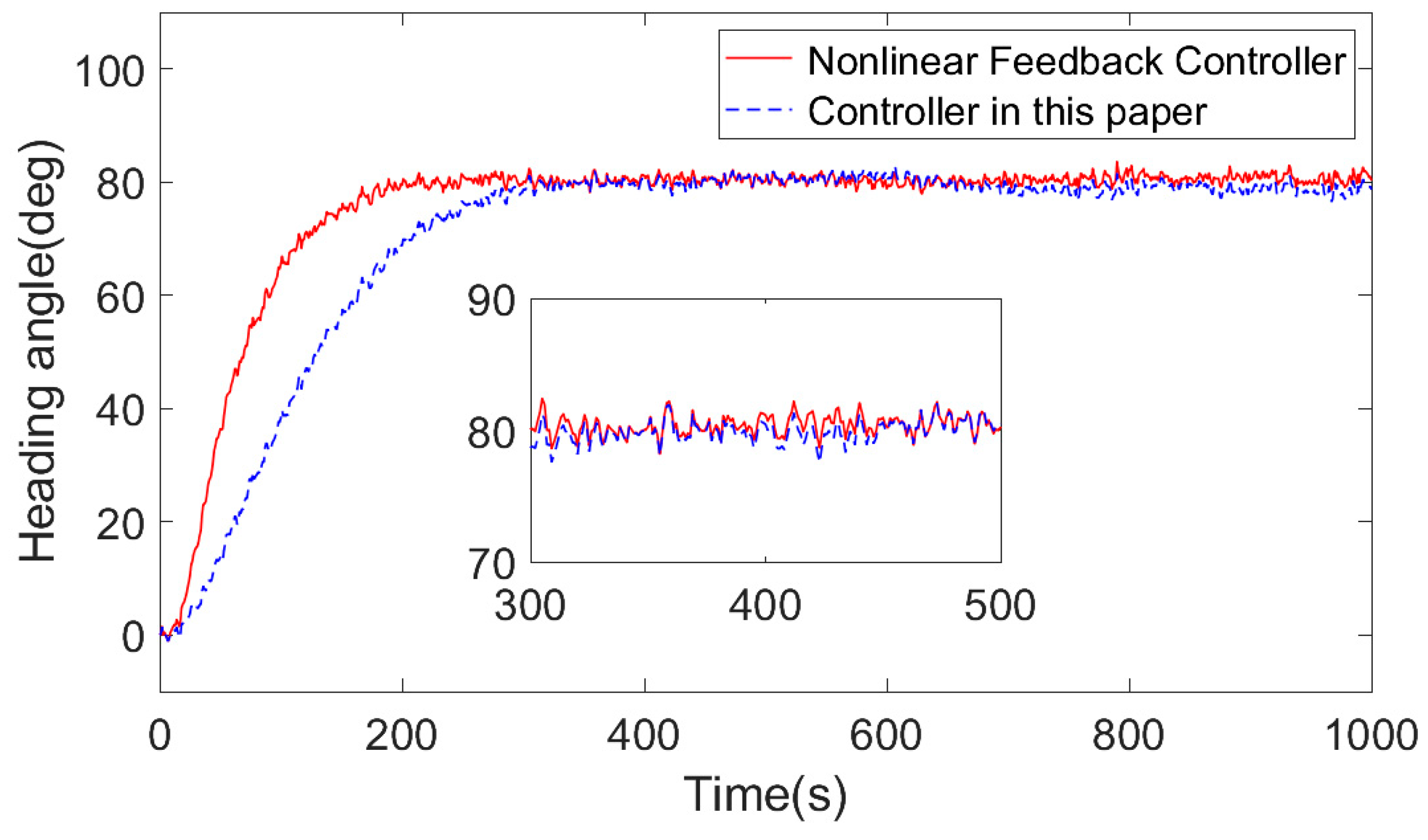
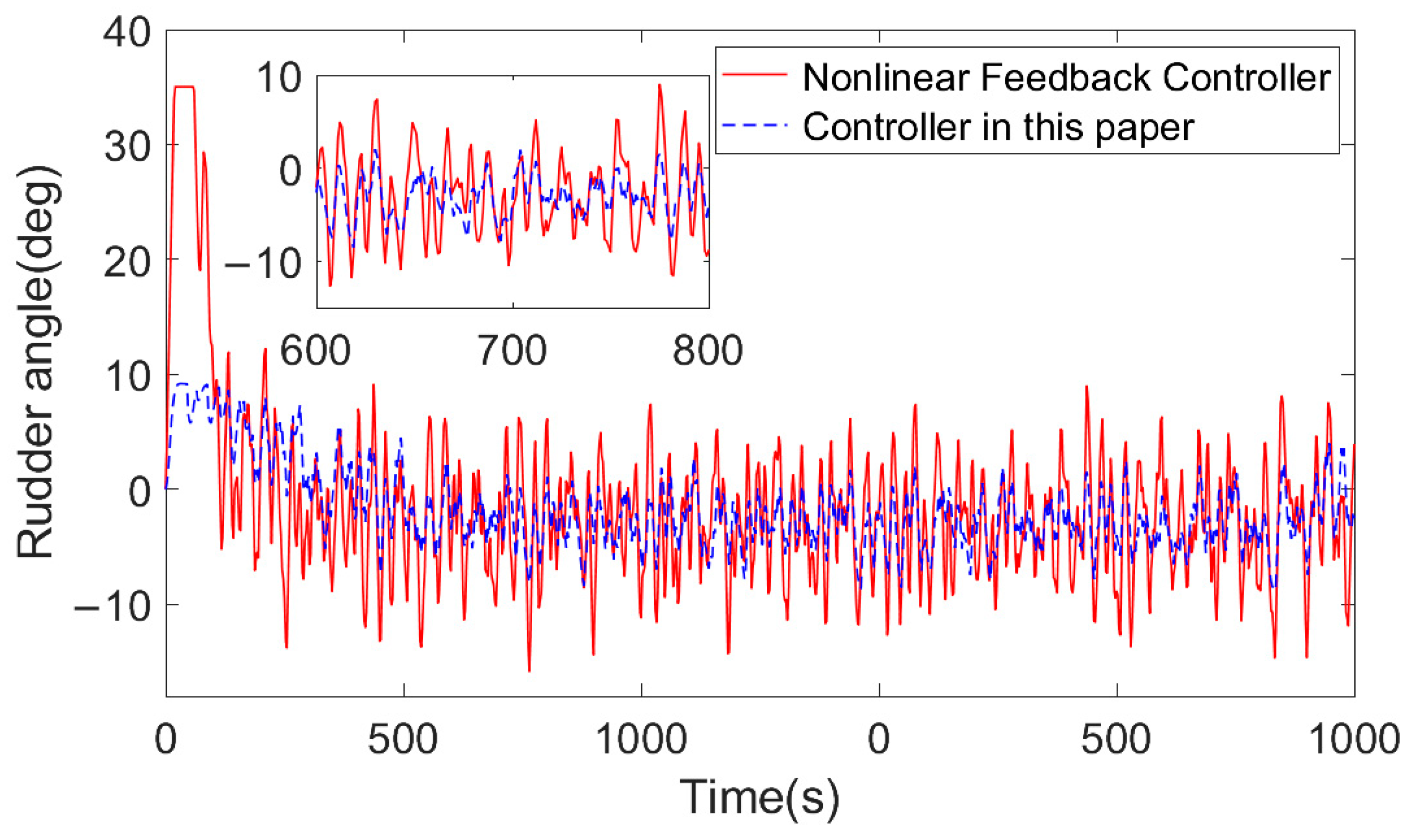
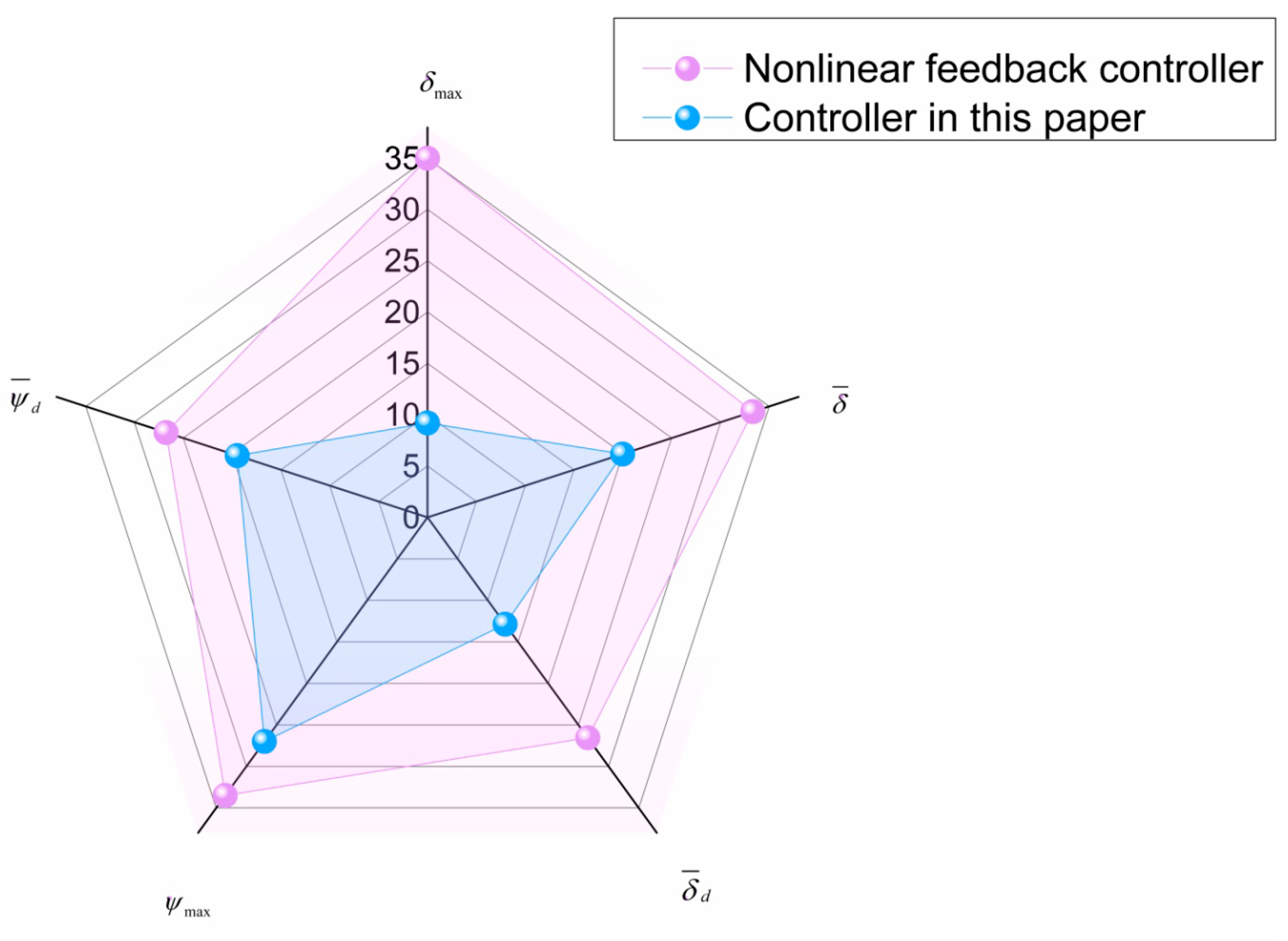
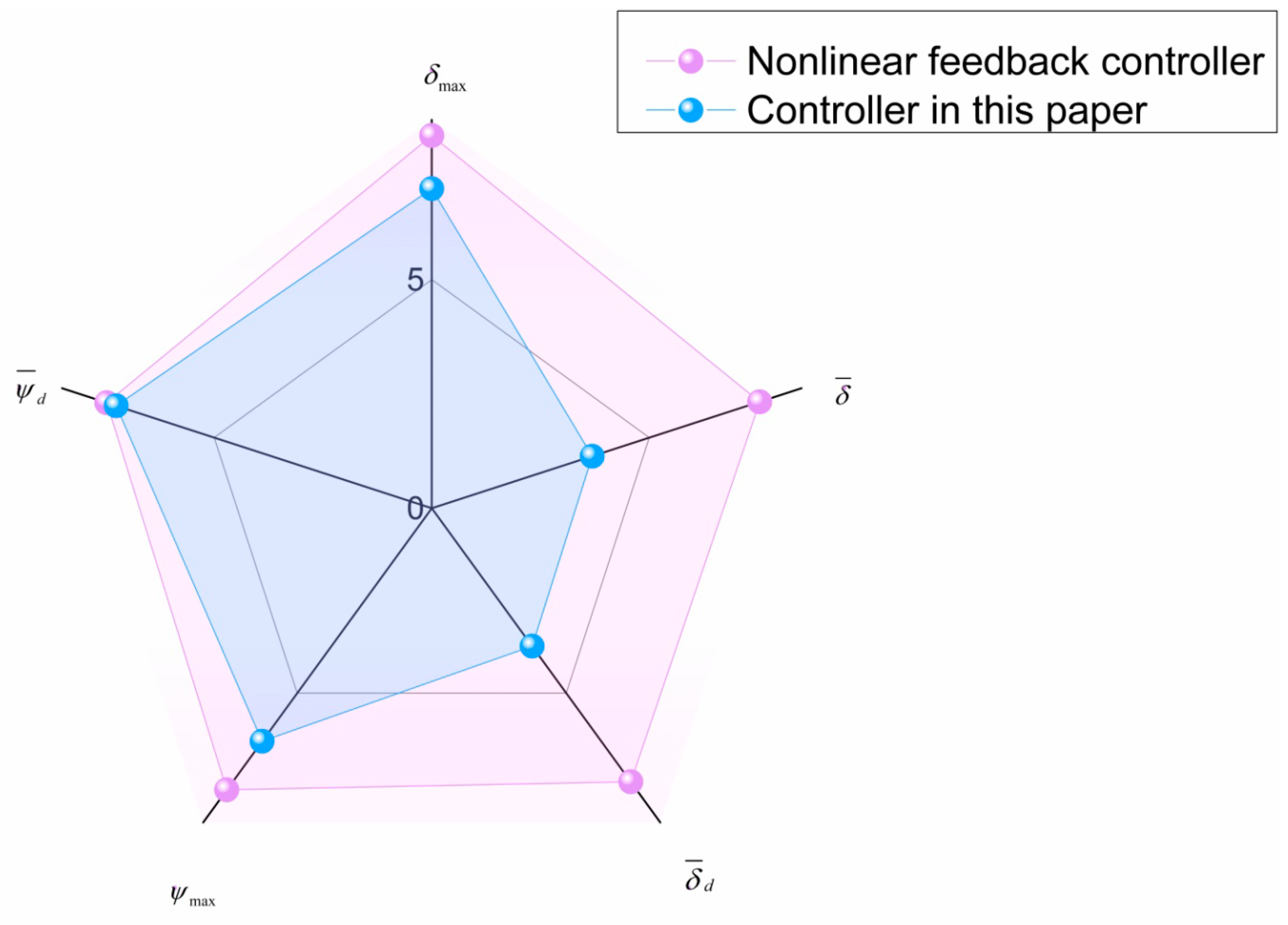
Section 4, and the performance of the controller is represented by a radar chart. The selected performance index is calculated by the radar chart area, and the comprehensive index of the controller is obtained. The results show that the control effect of the controller effectively achieves the purpose of course control, reduces the rudder angle output, and achieves a good energy-saving effect.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}