
Finite-Time Fault-Tolerant Tracking Control for an Air Cushion Vehicle Subject to Actuator Faults



Abstract
1. Introduction
2. Preliminaries and Problem Formulation
2.1. Preliminaries
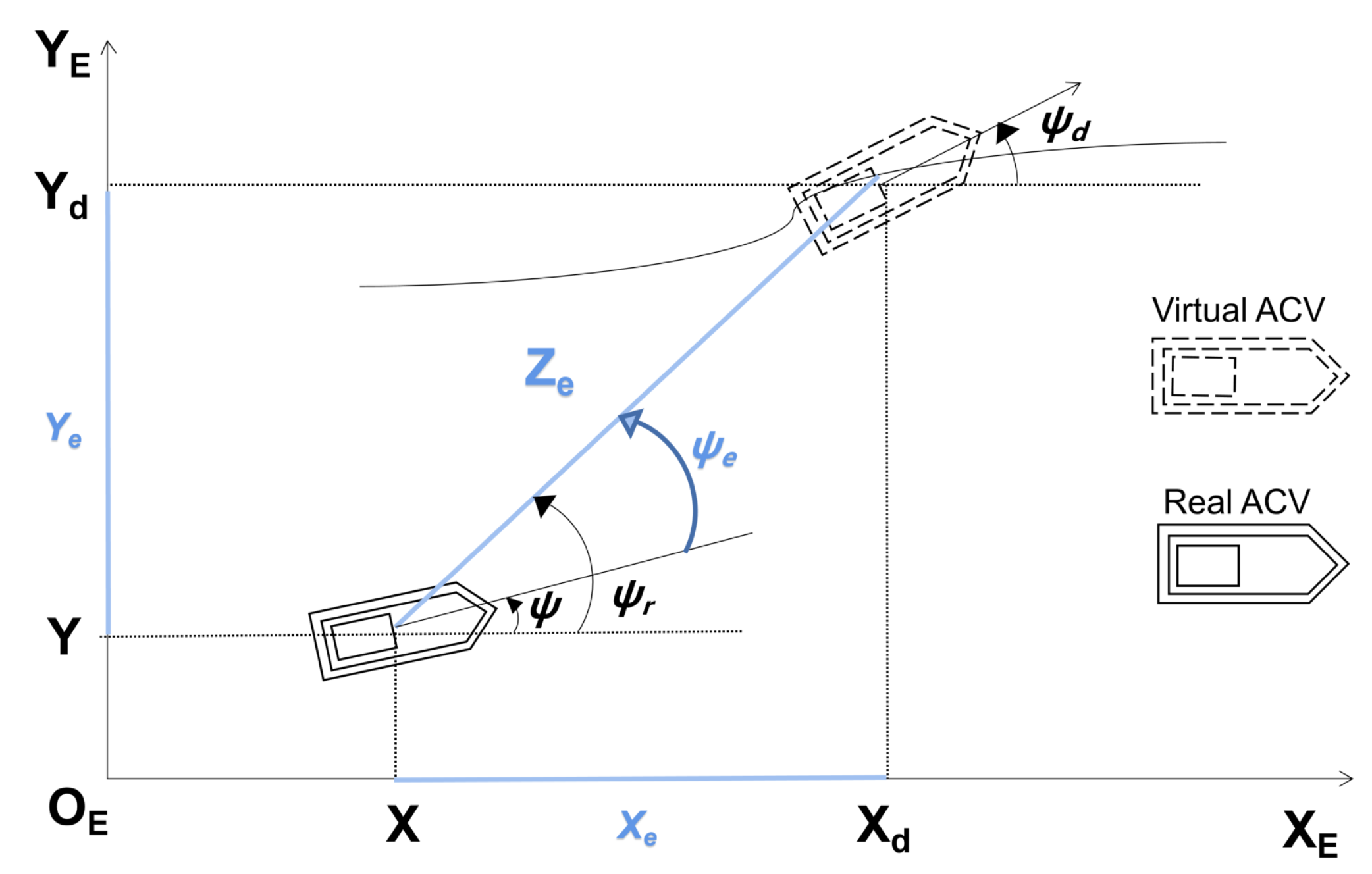
2.2. Problem Formulation
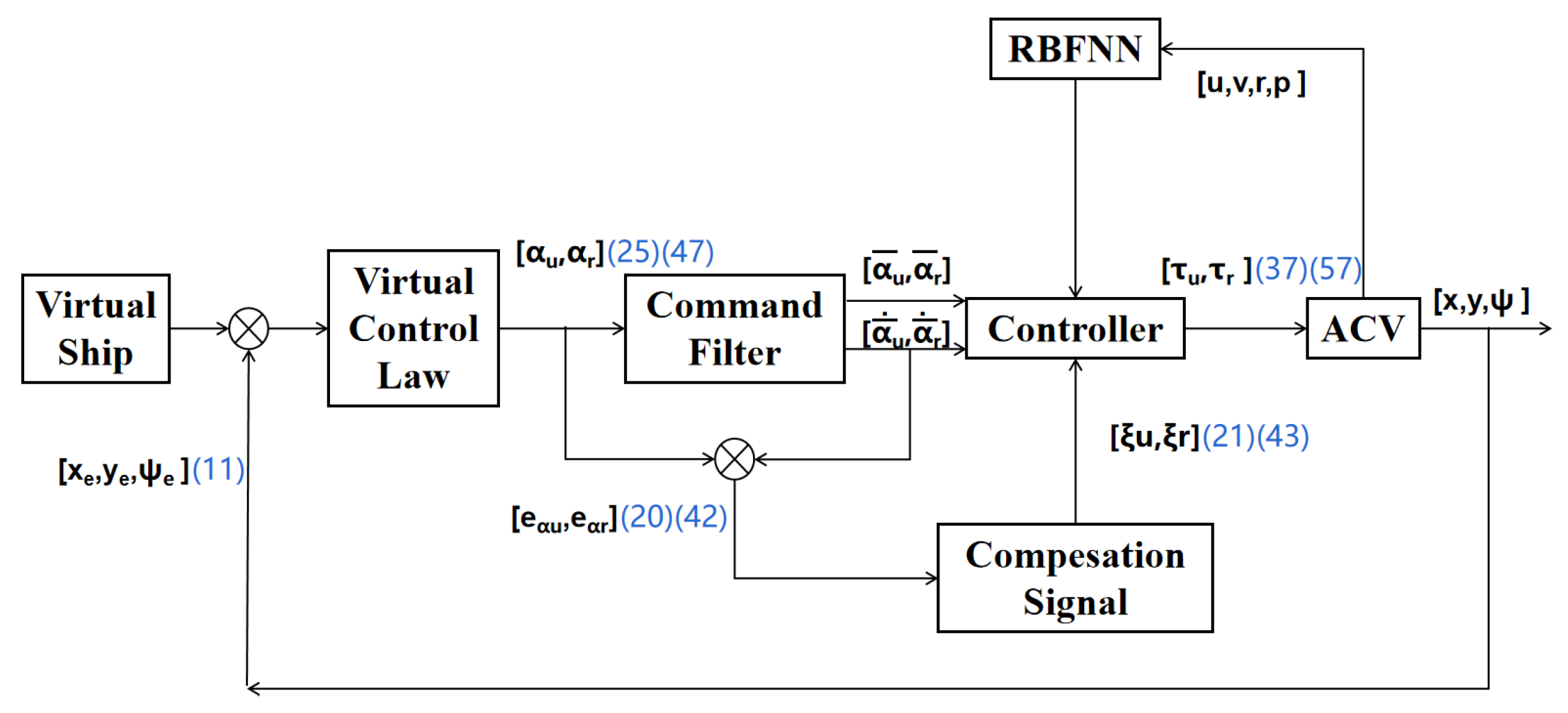
3. Finite-Time Controller Design
3.1. Position Controller Design
3.2. Surge Controller Design
3.3. Yaw Controller Design
4. Stability Analysis
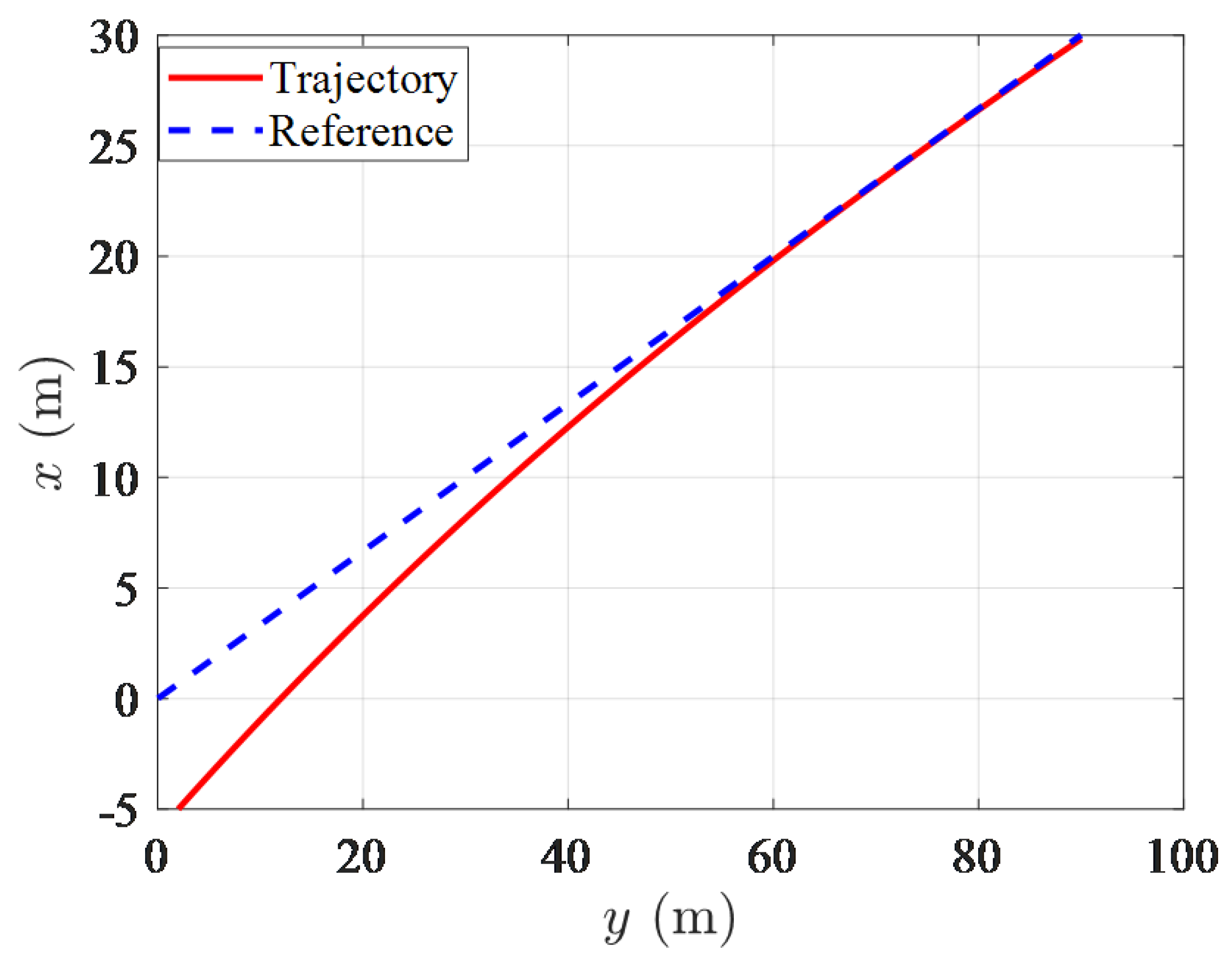
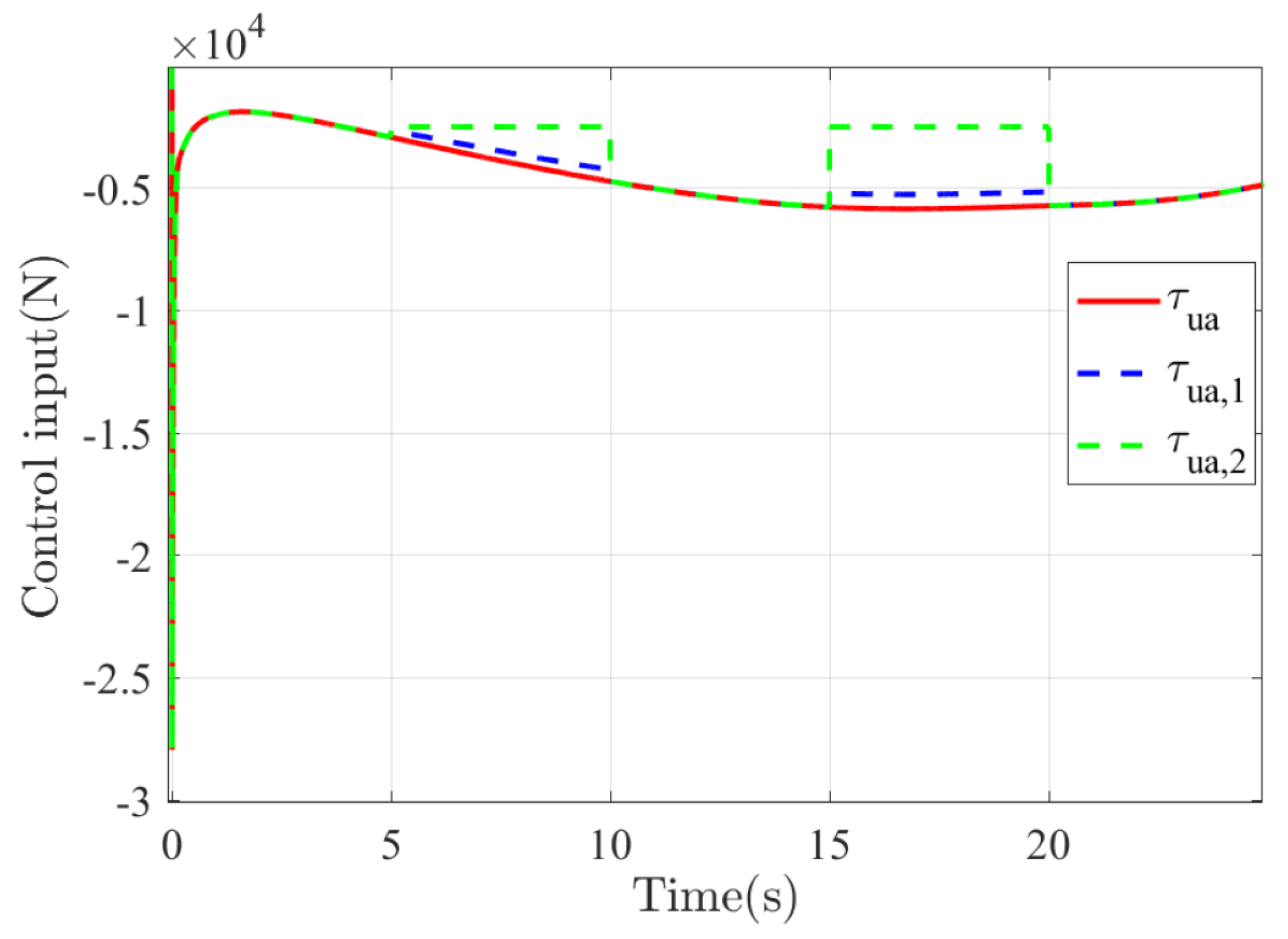
5. Simulation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shan, Q.; Liu, W.; Li, T. A Topology Reconfiguration Strategy for Containment Control of the Multi-USV System Based on Algebraic Connectivity. IEEE Trans. Ind. Electron. 2024. [Google Scholar] [CrossRef]
- Teng, F.; Wang, L.; Li, T. Distributed Noise-Resilient Secondary Control for AC Shipboard Microgrid Under Disturbances. IEEE Trans. Ind. Inform. 2024. [Google Scholar] [CrossRef]
- Ye, P.; Yu, R.; Shan, Q. Distributed Neuroadaptive Formation Control for Aerial Base Station-Assisted Hovercraft Systems with Mixed Disturbances. J. Manag. Sci. Eng. 2024, 12, 1946. [Google Scholar] [CrossRef]
- Su, Y.; Teng, F.; Li, T. Adaptive Prescribed-Time Tracking Control for an Unmanned Surface Vehicle Considering Motor-Driven Propellers. IEEE Trans. Ind. Inform. 2024, 99, 1–9. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Wang, C. A Review of Research on Safe Navigation Control Technology for Full Cushion Lift Air Cushion Ship. J. Harbin Eng. Univ. 2023, 44, 1475–1486. [Google Scholar]
- Zhao, S.; Guo, H.; Liu, Y. Fault-tolerant control of linear time-lag systems based on trajectory tracking. Inf. Control 2015, 44, 469–473. [Google Scholar]
- Zhao, J.; Wang, P.; Ding, X. Fault Tolerant Control and Simulation of Quadrotor Based on Adaptive Observer. J. Syst. Simul. 2022, 34, 1–10. [Google Scholar]
- Tang, J.; Ye, B.; Geng, J. Exploration and Practice of AR Intelligent Guidance Technology for Aircraft Assembly Operations. Aerosp. Manuf. Technol. 2019, 62, 22–27. [Google Scholar]
- Yan, X. Research Status and Development Trends of Intelligent Ships. Transp. Harb. Navig. 2016, 3, 25–28. [Google Scholar]
- Mustafa Abro, G.; Zulkifli, S. Modeling, Controlling and Stabilization of an Underactuated Air-Cushion Vehicle (ACV); International Conference on Signal and Image Processing Applications (ICSIPA): Kuala Terengganu, Malaysia, 2021; pp. 197–202. [Google Scholar]
- Wang, Y.; Tong, H. Second Order Nonsingular Terminal Sliding Mode Control with Extended State Observer for Course Control of Air Cushion Vehicle; OCEANS 2017-Anchorage: Anchorage, AK, USA, 2017; pp. 1–7. [Google Scholar]
- Fu, M.; Gao, H. Obust course control for air cushion vehicle via novel sigmoid function differential disturbance observer. In Proceedings of the 2017 IEEE International Conference on Information and Automation (ICIA), Macao, China, 18–20 July 2017; pp. 327–332. [Google Scholar]
- Di, C.; Borja, S. A FEM fluid–structure interaction algorithm for analysis of the seal dynamics of a Surface-Effect Ship. Comput. Methods Appl. Mech. Eng. 2015, 295, 290–304. [Google Scholar]
- Fu, M.; Bai, D. Fully robust sliding mode control of hovercraft with unknown perturbation upper bounds. Control Theory Appl. 2022, 39, 1130–1138. [Google Scholar]
- Fu, M.; Wang, Q. Safety-Guaranteed, Robust, Nonlinear, Path-Following Control of the Underactuated Hovercraft Based on FTESO. Mar. Sci. Eng. 2023, 11, 1235. [Google Scholar] [CrossRef]
- Bai, X.; Zhao, L. Finite-time output feedback attitude tracking control of a quadrotor UAV. Autom. Instrum. 2024, 39, 49–56+61. [Google Scholar]
- Zhen, H.; Qi, X.; Xia, M. Robust Adaptive Attitude Control for Quadrotor UAVs. Control Eng. 2013, 20, 915–919. [Google Scholar]
- Bai, C. Research on Event-Triggered Underdriven Ship Trajectory Tracking Control Based on Event Triggering. Master’s Thesis, Dalian Ocean University, Dalian, China, 2024. [Google Scholar]
- Tan, W. Trajectory Tracking Control of an Underwater Salvage Robot Under State Constraints. Master’s Thesis, Shandong Jiaotong University, Jinan, China, 2024. [Google Scholar]
- Xia, G.; Wu, H.; Zhao, A. Adaptive filtered backstepping terminal sliding mode control for ship heading tracking system. J. Beijing Inst. Technol. Nat. Ed. 2015, 35, 180–185. [Google Scholar]
- Li, F.; Huang, P.; Yang, C. Sliding mode control design of aircraft all-electric brake system based on nonlinear disturbance observer. Acta Autom. Sin. 2021, 47, 2557–2569. [Google Scholar]
- Xi, L.; Chen, Z.; Qi, X. Adaptive inverse sliding mode control of robotic arm based on nonlinear disturbance observer. Inf. Control 2013, 42, 470–477. [Google Scholar]
- Su, Y.; Teng, F.; Li, T. Fuzzy-based optimal control for an underactuated surface vessel with user-specified performance Propellers. IEEE Trans. Intell. Transp. Syst. 2025. [Google Scholar] [CrossRef]
- Li, W.; Zhou, T.; Lv, Z. AUV linear path following based on improved backstepping method. Nav. Electron. Eng. 2023, 43, 47–53. [Google Scholar]
- Zhang, W. Research on Fixed-Time Convergence Adaptive Control Based on Backstepping Method. Master’s Thesis, Henan University of Science and Technology, Luoyang, China, 2022. [Google Scholar]
- Zhu, F.; Xia, Y. Autitude stabilization of rigid spacecraft with finitetime convergence. Int. J. Robust Nonlinear Control 2011, 21, 686–702. [Google Scholar] [CrossRef]
- Fu, M.; Gao, X. Human-Centered Automatic Tracking System for Underactuated Hovercraft Based on Adaptive Chattering-Free Full-Order Terminal Sliding Mode Control. IEEE Trans. Ind. Inform. 2018, 6, 37883–37892. [Google Scholar] [CrossRef]
- Wang, F.; Chen, B.; Liu, X. Finite-Time Adaptive Fuzzy Tracking Control Design for Nonlinear Systems. IEEE Trans. Ind. Inform. 2018, 26, 1207–1216. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, Q. Adaptive output feedback control of stochastic nonholonomic systems with nonlinear parameterization. Automatica 2018, 98, 247–255. [Google Scholar] [CrossRef]
- Fu, M.; Dong, L.; Xu, Y. Adaptive Trajectory Tracking Safety Control of Air Cushion Vehicle with Unknown Input Effective Parameters. Appl. Sci 2020, 10, 5695. [Google Scholar] [CrossRef]
- Fu, M.; Gao, S. Design of driver assistance system for air cushion vehicle with uncertainty based on model knowledge neural network. Ocean. Eng. 2019, 172, 296–307. [Google Scholar] [CrossRef]
- Wei, W.; Chang, Y. Adaptive compensation for infinite number of actuator failures or faults. Automatic 2011, 47, 2197–2210. [Google Scholar]
- Farrell, J.; Sharma, M. Command filtered backstepping. IEEE Trans. Ind. Inform. 2009, 54, 1391–1395. [Google Scholar] [CrossRef]
- Yun, L.; Bliault, A. Theory and Design of Air Cushion Craft; Butterworth-Heinemann: Oxford, UK, 2000. [Google Scholar]
- Teng, F.; Zhang, Y.; Li, T. Distributed Optimal Energy Management for We-Energy Considering Operation Security. IEEE Trans. Netw. Sci. Eng. 2024, 11, 225–235. [Google Scholar] [CrossRef]
- Teng, F.; Ban, Z.; Li, T. A Privacy-Preserving Distributed Economic Dispatch Method for Integrated Port Microgrid and Computing Power Network. IEEE Trans. Ind. Inform. 2024, 20, 10103–10112. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | Variable | Value |
|---|---|---|---|
| m (kg) | (kg) | ||
| (kg) | () | 260 | |
| (m) | 23.6 | (2.8, 0, 0.3) | |
| (kg/ | 1.29 | (kg/ | 1025 |
| 1 | 0.9 | ||
| 1.02 | 1.05 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 10 | |||
| 9 | |||
| 3 | 1.5 | ||
| 1.5 | 1.5 | ||
| 1 | 1 | ||
| 1 | 0.02 | ||
| 0.02 | 0.2 | ||
| p | 99/101 |
| Convergence Accuracy | Convergence Time | |
|---|---|---|
| The method in this paper | 3.24 m | 30 s |
| The method in [30] | 7.95 m | 35 s |
| Control Effectiveness Rate | Parameter T | |
|---|---|---|
| case1 | 0.8 | 4 |
| case2 | 0.7 | 5 |
| case3 | 0.6 | 5 |
| case4 | 0.5 | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, R.; Zhou, Q.; Li, T. Finite-Time Fault-Tolerant Tracking Control for an Air Cushion Vehicle Subject to Actuator Faults. J. Mar. Sci. Eng. 2025, 13, 210. https://doi.org/10.3390/jmse13020210
Yu R, Zhou Q, Li T. Finite-Time Fault-Tolerant Tracking Control for an Air Cushion Vehicle Subject to Actuator Faults. Journal of Marine Science and Engineering. 2025; 13(2):210. https://doi.org/10.3390/jmse13020210
Chicago/Turabian StyleYu, Renhai, Qizheng Zhou, and Tieshan Li. 2025. "Finite-Time Fault-Tolerant Tracking Control for an Air Cushion Vehicle Subject to Actuator Faults" Journal of Marine Science and Engineering 13, no. 2: 210. https://doi.org/10.3390/jmse13020210
APA StyleYu, R., Zhou, Q., & Li, T. (2025). Finite-Time Fault-Tolerant Tracking Control for an Air Cushion Vehicle Subject to Actuator Faults. Journal of Marine Science and Engineering, 13(2), 210. https://doi.org/10.3390/jmse13020210