1. Introduction
Ship operators are required to meet many new regulatory statutes and market needs. This requirement has stimulated the development of weather routing systems and voyage optimization methods for shipping routes in ocean-crossing voyages. This paper presents a weather routing system based on dynamic programming that provides an optimal route with respect to voyage time, fuel consumption, and cargo or hull damage. The proposed system emphasizes both safety and route planning, which are critical for navigation and rely on precise oceanographic and meteorological data.
Owing to advancements in weather forecast data collection methods, maritime operators can now obtain up-to-date synoptic and forecast charts by simply turning a dial. However, correctly interpreting these charts to forecast the vessel’s performance under a present set of weather conditions is still challenging. The proposed voyage optimization system is fast when updating ship routes in real time. Real-time route updates enable captains and fleet managers to safely and effectively plan the course and speed of the ship between a given pair of departure and destination ports. The proposed system considers not only the weather conditions for any given voyage but also the ship’s performance.
The commonly used routing algorithms for minimizing fuel consumption or voyage time are based on the calculus of variations, the isochrone method, the isopone method, and two-dimensional (2D) dynamic programming. The calculus of variations [
1] is about finding a stationary function that maximizes or minimizes some functional (most commonly of arc length). Optimization is achieved by varying the parameters that control a given trajectory, such as time or velocity. The isochrone method [
2] is a practical deterministic approach for calculating the minimum-time route; optimization is achieved by varying the ship’s course while assuming constant engine power. The isopone method [
3] involves determining the optimal track by defining planes of equal fuel consumption (energy fronts) instead of time fronts.
A modified isochrone method has also been developed [
4], wherein a three-dimensional (3D) model is used. The modified method considers the variation in sea conditions during voyages and ensures that land is avoided. The iterative dynamic programming algorithm for optimized voyage planning is another algorithm designed to solve routing problems [
5]; however, this algorithm is computationally complex, requires long simulation times, and cannot use up-to-date ship conditions. Other relevant algorithms include the augmented Lagrange multiplier [
6], the Dijkstra algorithm [
7,
8,
9], which has established weight functions based on the weather forecast at sea and the reduction in ship speed, and the genetic algorithm [
10].
2D dynamic programming is an optimization approach grounded in Bellman’s principle of optimality, offering similarities to the modified isochrone method. This technique allows operators to define navigation boundaries in maritime applications by utilizing a suitable grid system. Wei and Zhou [
11] introduced a new forward 3D dynamic programming method derived from 2D dynamic programming aimed at optimizing fuel consumption during voyages. Their approach achieves fuel efficiency by accounting for variations in a vessel’s course and speed over time across diverse geographic locations.
Calculating speed loss is crucial for evaluating a ship’s performance in open-sea conditions and assessing its environmental impact. Several researchers have explored the calculation of speed loss in a seaway. Journée [
12,
13] applied and experimentally validated an approximation method to study the effects of ship motion on propeller performance. Faltinsen [
14] investigated resistance and propulsion in seaways and asserted that because the frequency of encounters with incoming waves is considerably lower than the propeller rotational frequency, only vertical velocity due to ship motion substantially affects propeller performance in waves. Furthermore, Nakatake et al. [
15] developed a panel method using source and sink distributions to simulate the ship hull, propeller, and rudder. They computationally investigated the interactions among these three components. Kashiwagi et al. [
16] investigated propeller performance in waves using the enhanced unified theory, which is derived from ship motion theory. Martic et al. [
17] evaluated the added resistance in waves using the 3D panel method based on the Kelvin-type Green function. Lastly, Chuang and Steen [
18] conducted experiments to analyze ship power and speed loss in waves. Jasna and Odd [
19] provided empirical evidence for the claim that speed loss is influenced more by changes in the sea state than by the added resistance experienced by a ship in waves. Chuang and Sverre [
20] performed model tests to predict the thrust deduction factor in waves; the results demonstrated that the heading angle to the beam sea played a greater role than added wave resistance.
Computational fluid dynamics (CFD) techniques are a widely recognized and robust method for evaluating the speed loss of ships through self-propulsion simulations under various ship design scenarios. Dai et al. [
21] used CFD with a Reynolds-averaged Navier–Stokes (RANS) approach to compute propeller open water simulations and self-propulsion simulations in calm water and head and oblique waves. Kim et al. [
22] applied CFD with an Unsteady RANS approach to calculate the added resistance and ship motion in waves with different headings. Hsin et al. [
23], Lin et al. [
24], and Lu et al. [
25] have computed speed loss through simulated self-propulsion tests in calm water and in waves. The aforementioned studies applied different approaches for conducting self-propulsion tests. Moreover, full-scale CFD self-propulsion simulations employing RANS were conducted by Mikulec and Piehl [
26] and Saydam et al. [
27], whose findings were validated through sea trials involving a 555.75-ton displacement research vessel and a 9060-ton displacement tanker, respectively. Similarly, Farkas et al. [
28] conducted full-scale CFD simulations of hull resistance, propeller open water, and self-propulsion tests to estimate the benefits of speed reduction strategies, such as slow steaming, in realistic sailing conditions.
Furthermore, the Marine Environment Protection Committee (MEPC) within the International Maritime Organization [
29] and Kwon [
30] have developed empirical formulae that efficiently estimate speed loss. These formulae are based on the assumption of constant engine performance, thereby obviating the need for complex measurements of added resistance, propulsion factors, or propeller characteristics.
The subsequent section reviews existing speed loss estimation methods and introduces a modification to Kwon’s equation proposed in the present study.
3. Weather Routing System
In the weather routing process, weather conditions are evaluated at predetermined waypoints along the route. First, the decision is made whether to bypass a waypoint due to excessively severe weather. If proceeding is deemed feasible, the speed loss is calculated based on the prevailing weather conditions. Finally, the optimal route is determined by considering the vessel speeds at all waypoints, either to achieve the shortest travel time or the most fuel-efficient path.
3.1. Wind Field Data Acquisition and Processing
Modern marine weather forecasts cover most of the ocean, although some regions remain without coverage. Facsimile receiving equipment is now standard onboard ships. Ships at sea can receive hydrological information and weather forecasts from most countries worldwide with high integrity and in real time through the radio teletype, Navtex, and Radiofax communication systems. Weather forecasts and weather type information might differ depending on the sailing area. This study selected two sets of wind field data: one for static weather routing and the other for dynamic weather routing. The data for static routing were obtained from Remote Sensing Systems and sponsored by the NASA Ocean Vector Winds Science Team. The static routing data comprised monthly average scalar wind speed and vector wind direction data over an 8-year period from September 1999 to October 2009.
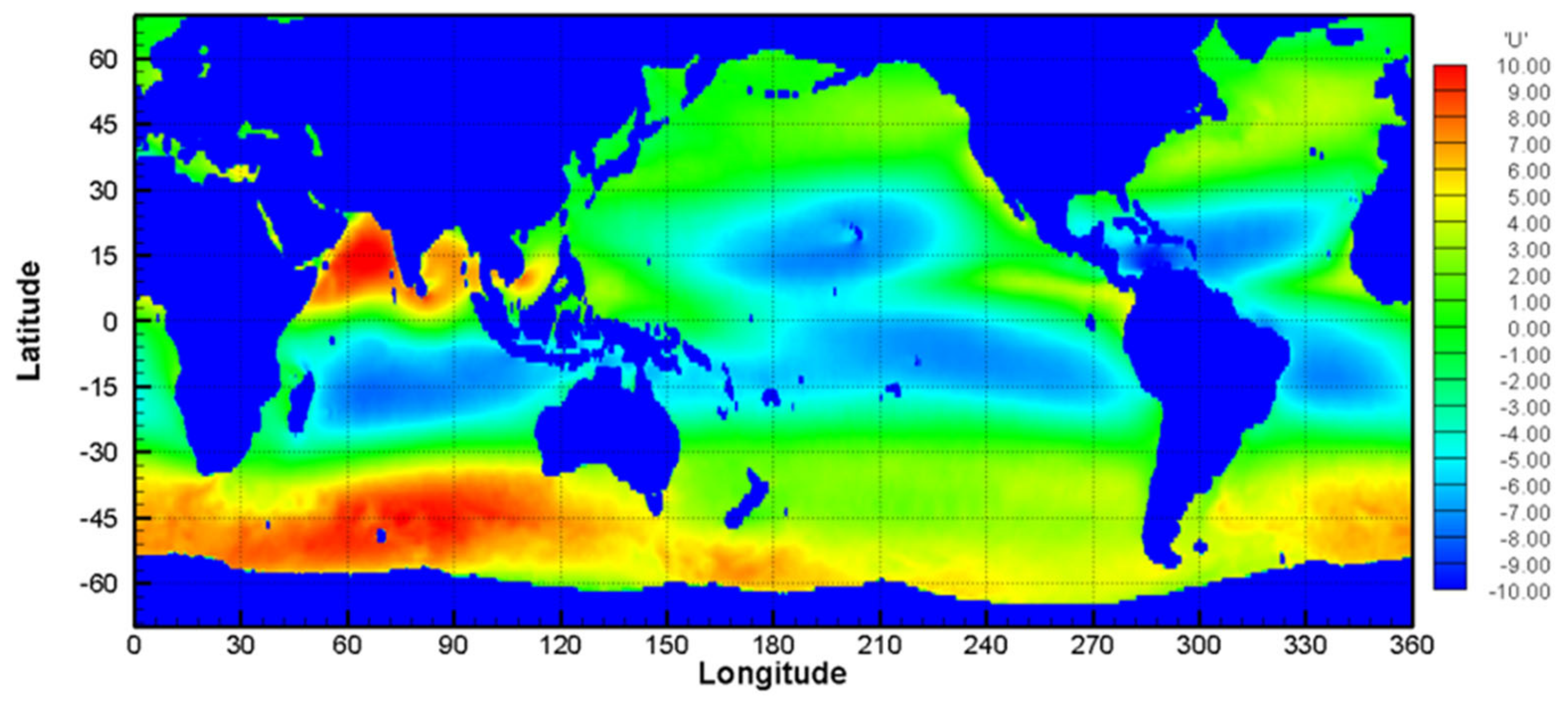
MATLAB was used to extract wind field data in NetCFD (*.nc) format, which contains information on several variables, including global variables. The data had a fixed height (sea level of 10 m) within the latitudes of −70° to 70° and longitudes of 0° to 360°. The wind direction and wind speed data were processed separately; thus, six variables were generated after the long-term data were processed. These data were stored as matrices for longitude (1440 × 1), latitude (560 × 1), time in months (12 × 1), radial wind (1440 × 560 × 12), zonal wind (1440 × 560 × 12), and wind speed (1440 × 560 × 12).
These data were exported and plotted using the Tecplot software to produce charts. For example, the horizontal and vertical components of the wind fields for July and December are presented in
Figure 6 and
Figure 7. The colors represent wind speed in knots plotted on a 0.25° × 0.25° grid. Wind field data were not available for the land area and are colored in blue.
For dynamic weather routing, wind field data were obtained at 3-h intervals on a 0.25° × 0.25° grid from the website of the European Center for Medium-Range Weather Forecasting.
In static weather routing, the weather information is obtained once. In contrast, weather information changes according to the weather forecast in dynamic weather routing.
Figure 6 and
Figure 7 illustrate the weather conditions along the route.
3.2. Dynamic Programming
The optimal shipping route typically depends on ship type, cargo, schedule, and operational plans when underway. In practice, these objectives must be considered together. Hence, multiobjective algorithms should be used for weather routing.
Dynamic programming is an effective method for solving multiobjective problems, such as the shortest path problem. Based on Bellman’s principle of optimality [
36], dynamic programming simplifies a complex optimization problem by breaking it down into a sequence of smaller, more manageable problems. The most salient feature of dynamic programming is multistage optimization [
37]. The ultimate goal of applying this weather routing approach is not to avoid all adverse weather conditions but to minimize sailing time while ensuring the safety of the vessel and crew.
In dynamic programming, each stage of the decomposed problem is optimized individually, with the solution from one stage serving as the input for the next. In this study, voyage progress was selected as the stage variable; each stage represented the journey between two waypoints in the problem’s planning horizon. The nodes selected at each stage constituted the decisive variable, and the objective was to minimize overall sailing time.
Another feature of dynamic programming is that each stage of the optimization problem has an associated state. Nodes govern the set of all possible choices for each stage. An increase in the number of nodes increases the computational cost. Node construction requires insight into the optimization problem; no rules for determining the nodes are available. In this study, nodes were selected as course turning points (i.e., waypoints) computed along a line perpendicular to the Great Circle route from the origin to the destination. Each course between stages could be expressed explicitly.
A recursive optimization procedure must be used to solve the overall problem by solving each stage in turn. This can either be a forward induction process from the origin to the destination or a backward process. Problems involving uncertainty, such as the shortest path problem, can only be solved with backward induction.
Recursive optimization was used to calculate the shortest sailing time between subvoyages. Weather forecast quality was considered to be lower for longer forecast times and more adverse weather. In practice, sailing routes should be recomputed whenever the meteorological data and the ship’s position are updated.
3.3. Formalizing the Dynamic Programming Approach
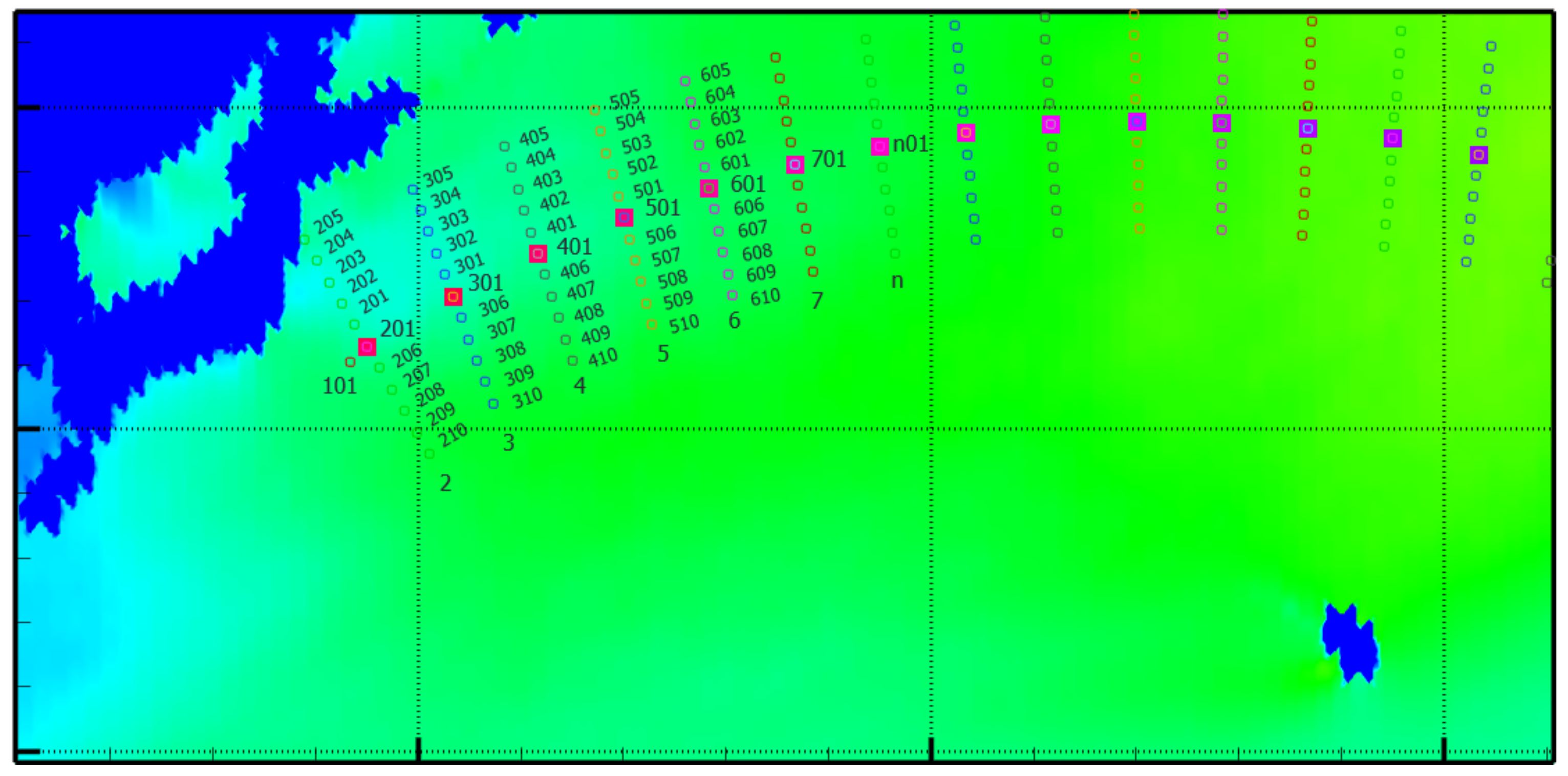
To plan a route based on meteorological information, an initial route must first be established. Multiple waypoints (i.e., nodes) can then be selected along the path. The route can be optimized by selecting a set of nodes.
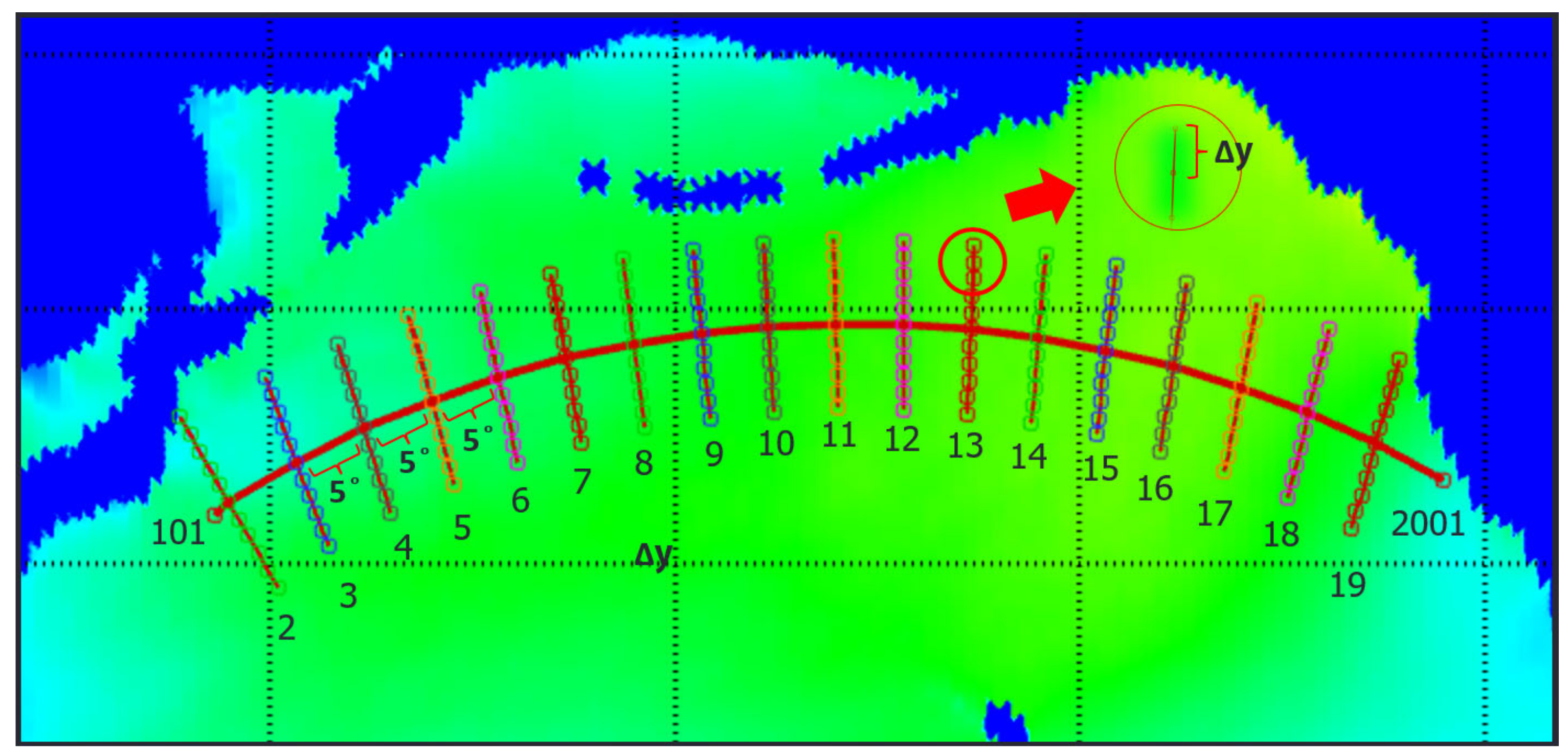
Figure 8 presents a grid system displaying a route between Japan and the US.
For the initial route, nodes were inserted every 5° of latitude from the origin (node 101) to the destination (node 2001), forming a 20-leg route with 19 decision stages. The nodes at each stage were perpendicular to the initial route, and the distance between adjacent nodes was
.
Figure 9 shows the numbering system for the nodes used in all the simulations.
Route adjustments should be made based on the vessel’s planned speed and any expected effects of tidal streams and currents. The quantity and spacing of the nodes at all stages are variables that can be determined on a case-by-case basis by considering the user’s preferences in the voyage area, the user’s total voyage distance, and the available computational capacity.
4. Case Studies
Two container ships were selected, and numerical simulations were performed on them to demonstrate the application of the proposed weather routing system.
4.1. KCS Simulation
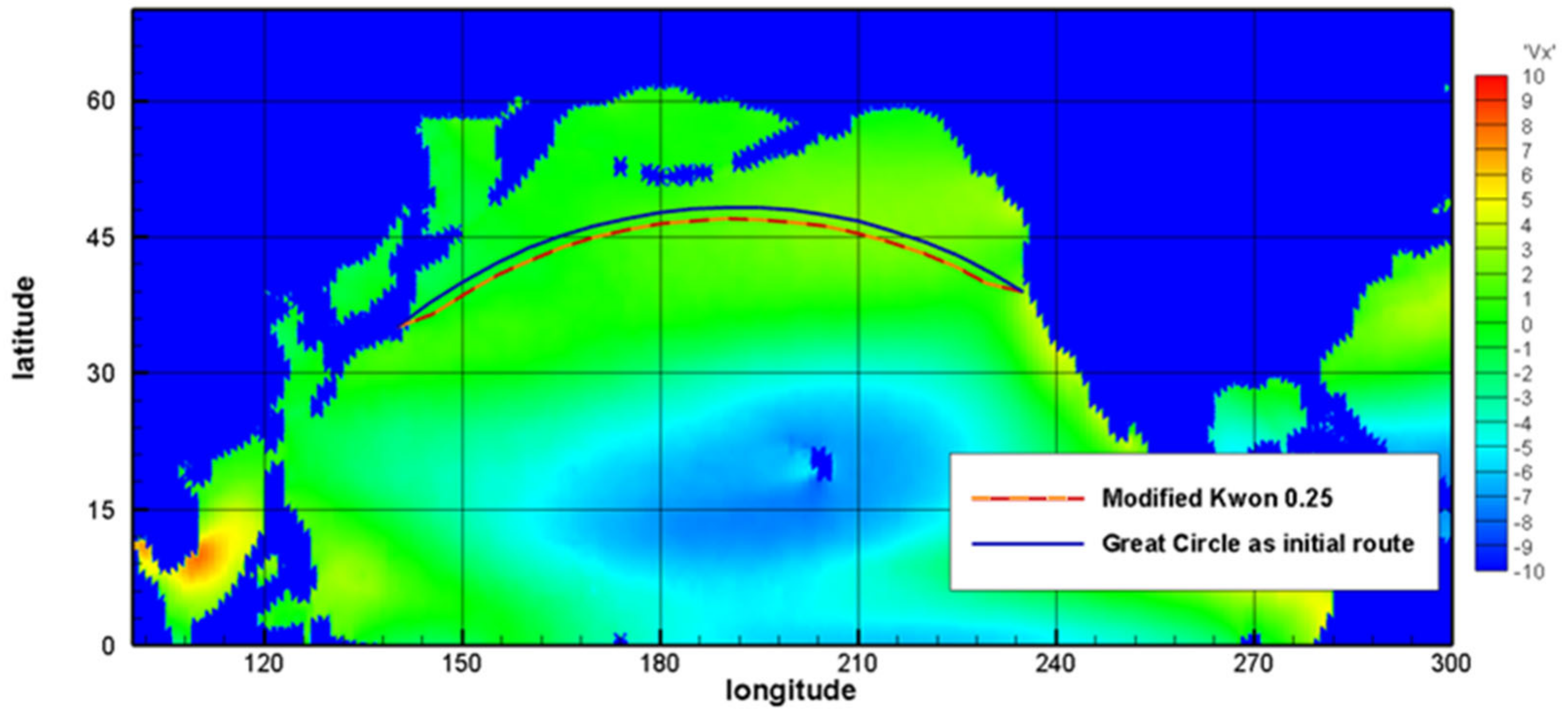
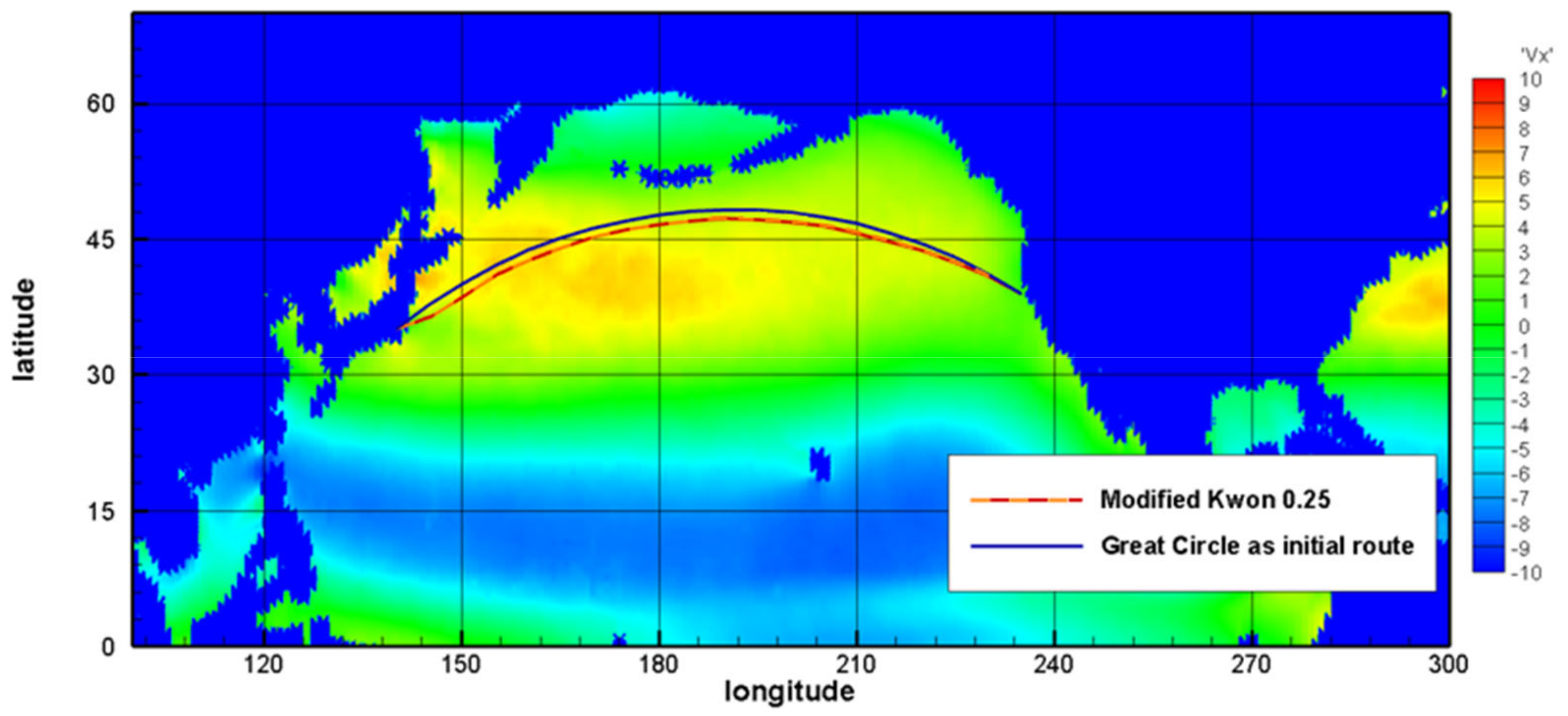
To validate the prototype of the proposed weather routing system, simulations were performed on a KCS with a cargo-carrying capacity of 3600 twenty-foot equivalent units on an eastbound trans-Pacific voyage from Yokohama, Japan (φ 35°00.0′ N, λ 140°00.0′ E) to San Francisco, US (φ 39°00.0′ N, λ 125°00.0′ W) using static wind speed and direction data in July and December, respectively.
For a ship, the Great Circle route is a natural choice as the initial route because it represents the shortest distance. Waypoints were defined for this Great Circle route at intervals of 5° longitude for a total of 19 stages. A total of 11 nodes were defined for each stage, perpendicular to the route, with a separation of 0.25°, and on a straight line (i.e., a constant course in the Mercator projection). This initial route was optimized by selecting optimal nodes.
The optimized routes obtained after using the modified Kwon’s method are presented. Magnified maps for July and December are presented in
Figure 10 and
Figure 11. The average monthly wind speeds were significantly different in the northern oceans between July and December; the wind speed increased from summer to winter by more than 50% above 40° N. Therefore, compared to summer, there is a tendency to favor routes at higher latitudes in winter.
4.2. Container Ship Simulation
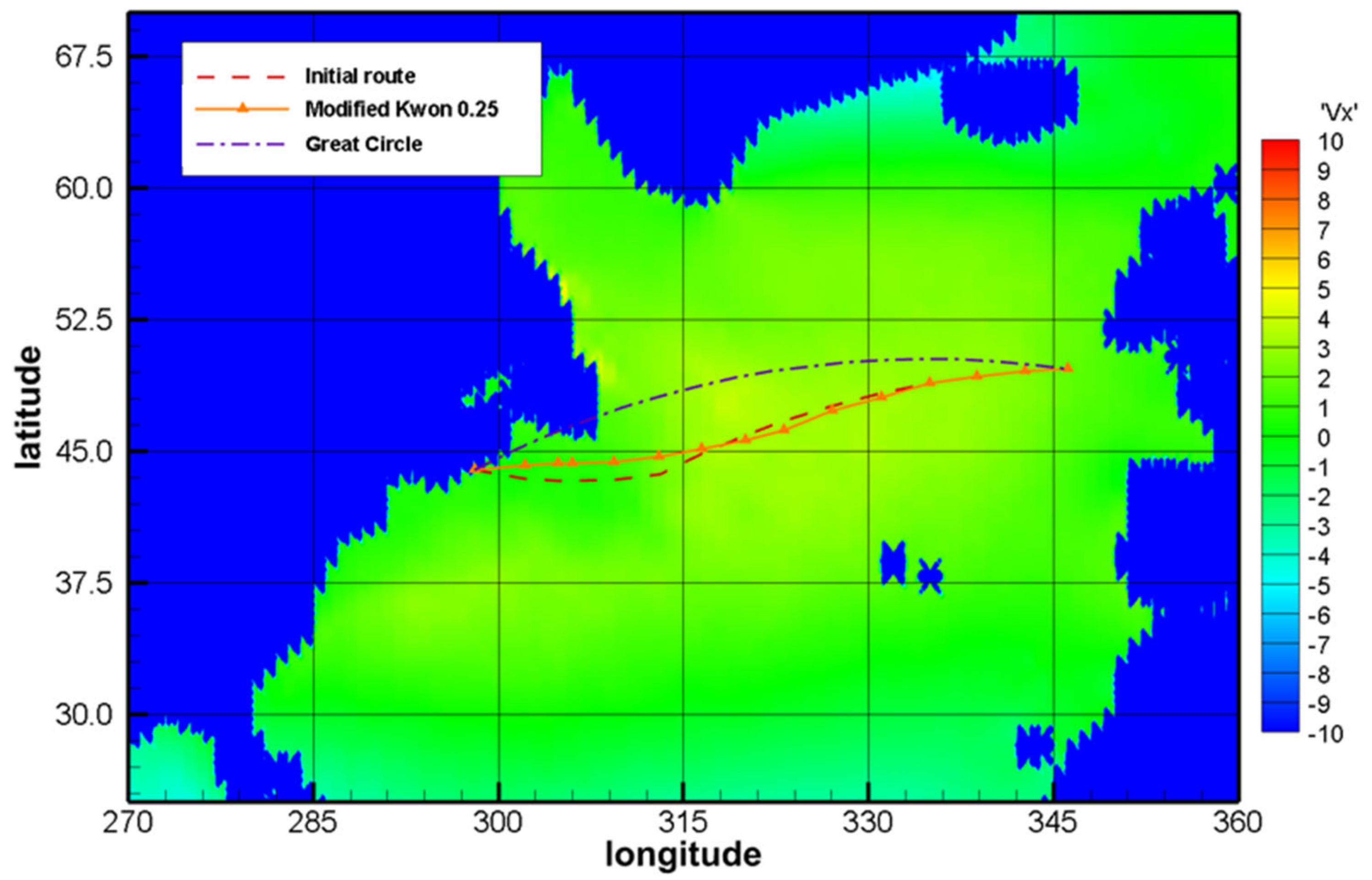
This study conducted additional simulations on a container ship with a cargo-carrying capacity of 4600 twenty-foot equivalent units on eastbound and westbound trans-Atlantic voyages. The eastbound voyage was from Halifax, Canada (φ 44°39.0′ N, λ 63°34.0′ W), to Rotterdam, the Netherlands (φ 51°55.0′ N, λ 4°28.0′ W). The westbound voyage was from London, England (φ 51°30.0′ N, λ 0°07.0′ W), to Norfolk, US (φ 36°51.0′ N, λ 76°17.0′ W).
In addition to the Great Circle routes, historical operating routes can be selected as the initial route in the proposed system. The course alteration points were derived from empirical data on course changes along the route. The container ship’s daily noon reports and voyage log in April were used to select the initial stages and nodes.
For the eastbound route, pilot time and estuary sections were deliberately removed from the optimization. The points (φ 43°93.0′ N, λ 61°90.0′ W) and (φ 49°69.0′ N, λ 13°80.0′ W) in the open sea were therefore selected as the origin and destination, respectively, resulting in a 15-stage dynamic programming problem.
Dynamic wind speed and direction data for the North Atlantic were sourced from the European Center for Medium-Range Weather Forecasting and used to calculate ship speeds and headings between stages. Each stage, excluding the departure point, had a total of 17 nodes.
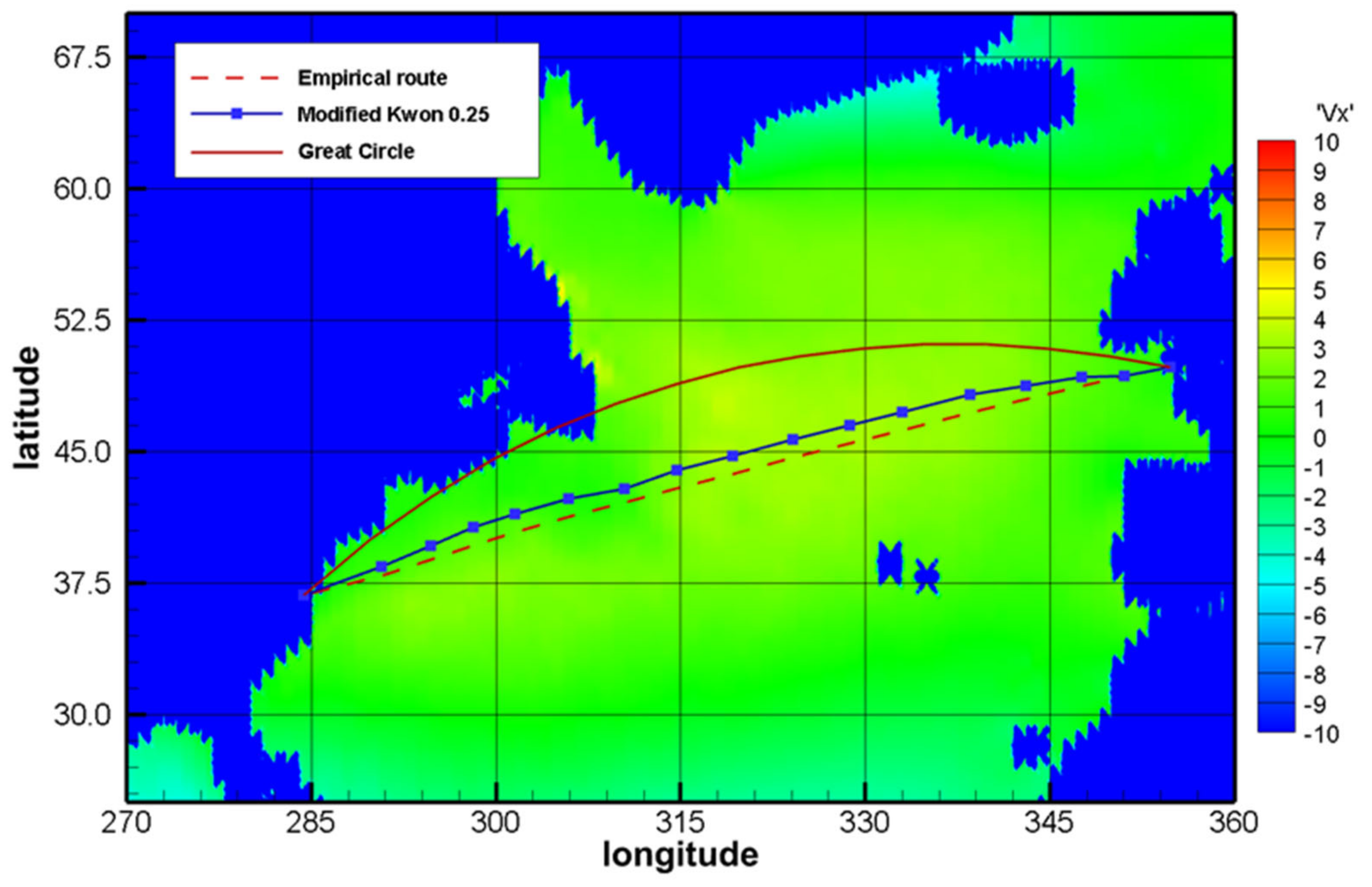
Figure 12 depicts the initial historical route and the optimal routes obtained through the modified Kwon’s method. The Great Circle route is included for reference only.
Table 17 presents a comparison of the optimized routes and the initial routes. The modified route had a 3.8% lower travel duration than the initial route. Since we adopted a fixed fuel consumption approach, the percentage of fuel consumption savings is equivalent to time savings. This time reduction was achieved by choosing shorter routes when favorable weather conditions permitted and by preferentially sailing in calm water (i.e., sea state 0) without speed loss.
The return voyage was modeled with 17 legs and nine expansion nodes for each of the 16 stages.
Figure 13 presents the initial historical route and the optimal routes obtained with the modified Kwon’s methods. According to data in
Table 18, the modified Kwon’s method reduced the voyage duration by 0.85% compared to the historic route of the liner. This study determined that the proposed method was consistent with the judgment of the captain who chose this empirical route.
5. Conclusions
Rough weather conditions can substantially affect a ship’s performance. To mitigate the adverse effects, this study applies a multi-fidelity computational approach that integrates potential flow and viscous flow methods to calculate speed loss accurately and efficiently. Based on the computational results, the study modified the equations of the ship form coefficient in Kwon’s method to estimate the voyage performance of specific ship types under given wind conditions accurately and efficiently. This modified Kwon’s formula was integrated with an optimization system for weather routing. The utility of the proposed system was confirmed in two case studies involving container ships, wherein the proposed system suggested appropriate routes. This system could serve as a valuable resource for related research in the shipping industry.
The speed loss of the KCS at sea was evaluated using three methods: Kwon’s method, the MEPC method, and CFD simulations. Following empirical modifications, Kwon’s formula provided a closer approximation of speed loss, with derived results matching the numerical outcomes. While the modification proved effective, future research should focus on generating additional validation data for simulations under various wave conditions, including different Beaufort numbers. Furthermore, results for other ship models should also be gathered to facilitate broader comparisons.
The system could also be adapted to address operational requirements beyond voyage time reduction. For instance, cruise ships and chemical tankers carrying volatile cargo prioritize arriving safely on schedule, while schedule adherence is less critical for the other ship types. For North Atlantic container ships, minimizing fuel consumption is often the primary concern due to high fuel costs. In the future, the system could be extended to support multiobjective optimization, encompassing factors such as fuel consumption, operational costs, emissions, ship speed, and other considerations. Such advancements are now feasible, given the availability of affordable, high-performance computing resources.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}