
Collision Avoidance for Maritime Autonomous Surface Ships Based on Model Predictive Control Using Intention Data and Quaternion Ship Domain


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
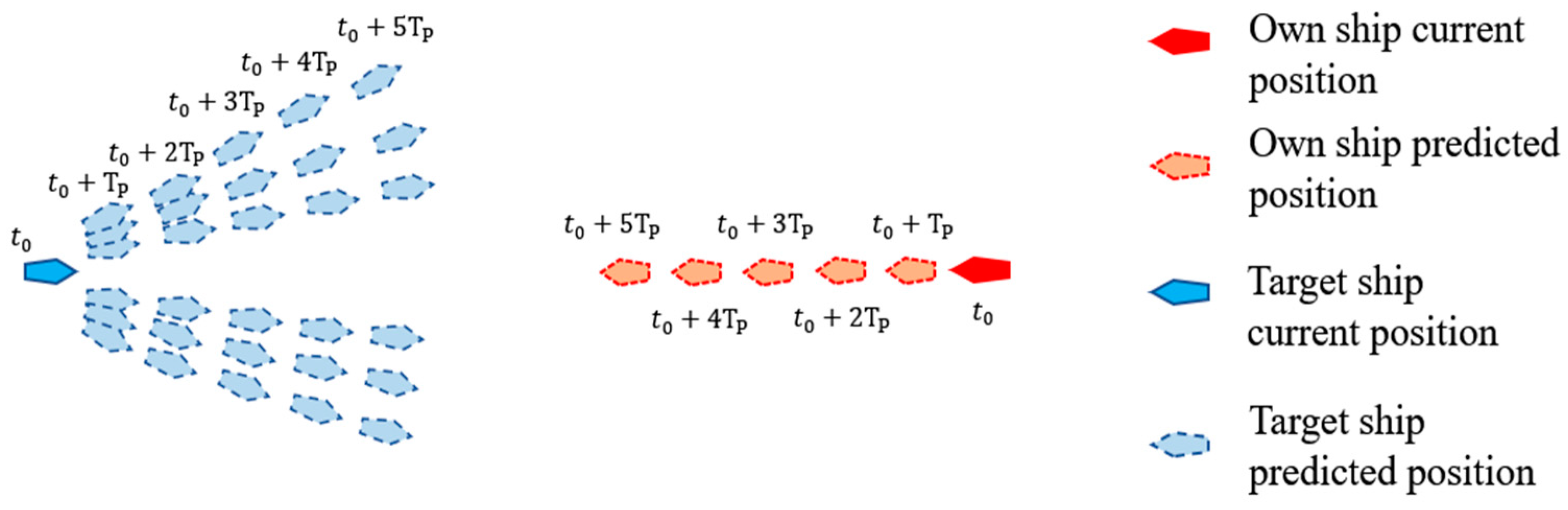
- Intention data of the target ships are included to predict their trajectories more accurately, which is beneficial to make more appropriate collision avoidance actions. The own ship predicts both its and the target ship’s motion trajectories, and calculates whether there is collision risk between them in the prediction horizon. If risk exists, the own ship takes avoidance action in advance. Compared to traditional collision avoidance algorithms which design the target ship trajectories based on a steady course, this method considers the intention data of the target ships, understanding the variations of their trajectories, which better aligns with reality.
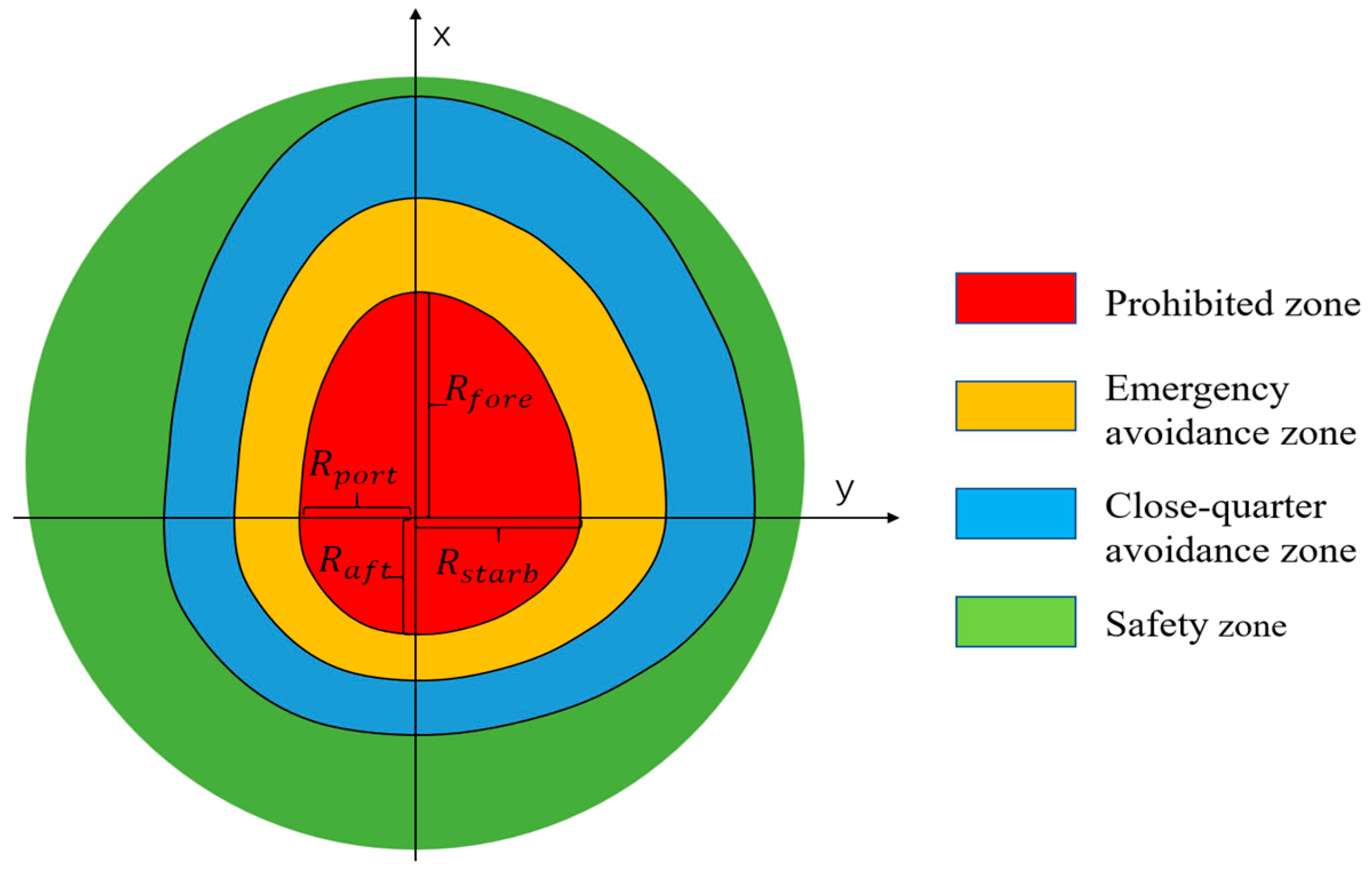
- (2)
- Encounter situations are categorized into different urgency levels. A quaternion ship domain with its adjacent area is constructed into a safe zone, close-quarter avoidance zone, emergency avoidance zone, and prohibited zone. This distinguishes encounter situations with or without risks that reduce the computational burden of the collision risk generated by multiple control commands at each sampling moment. Moreover, a collision risk assessment function is designed to obtain an optimal heading offset for collision avoidance in different close-quarter situations and immediate danger situations. The own ship’s avoidance action complies with the COLREGs under close-quarter situations. When in immediate danger situations, the own ship could also exhibit good performance.
- (3)
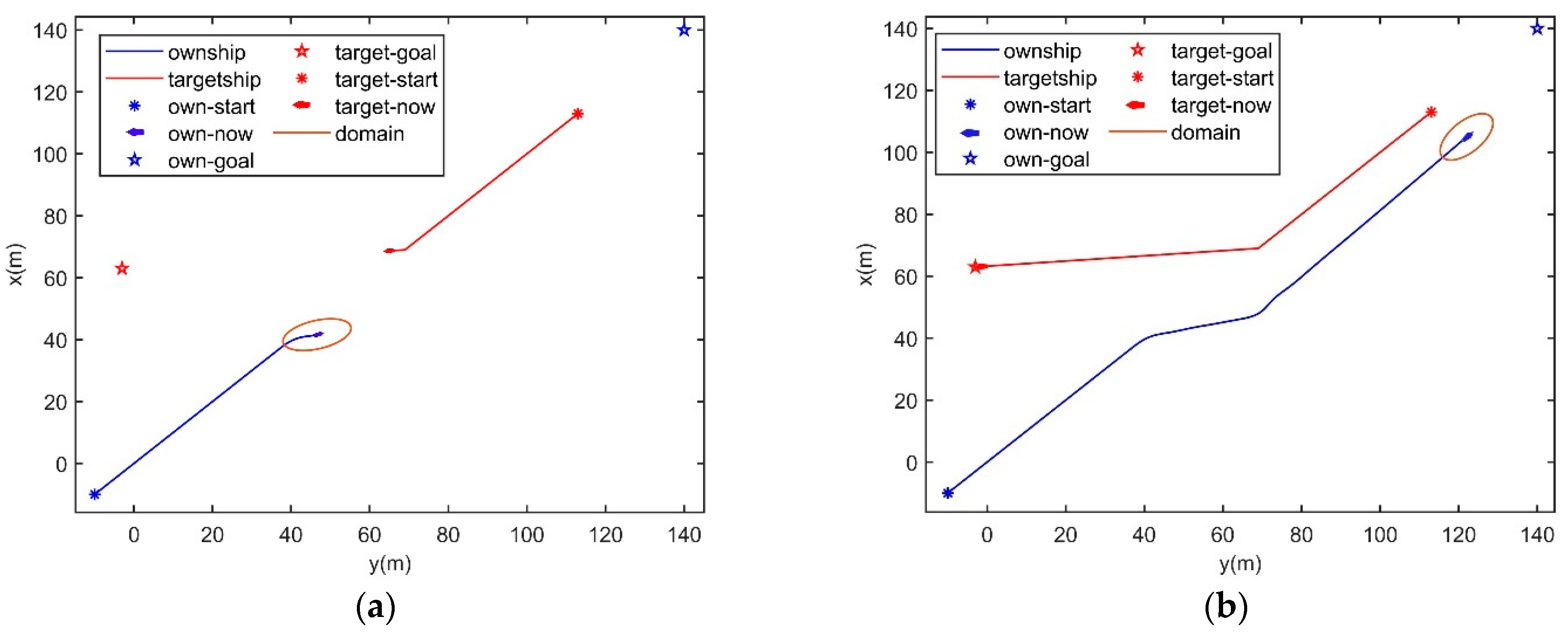
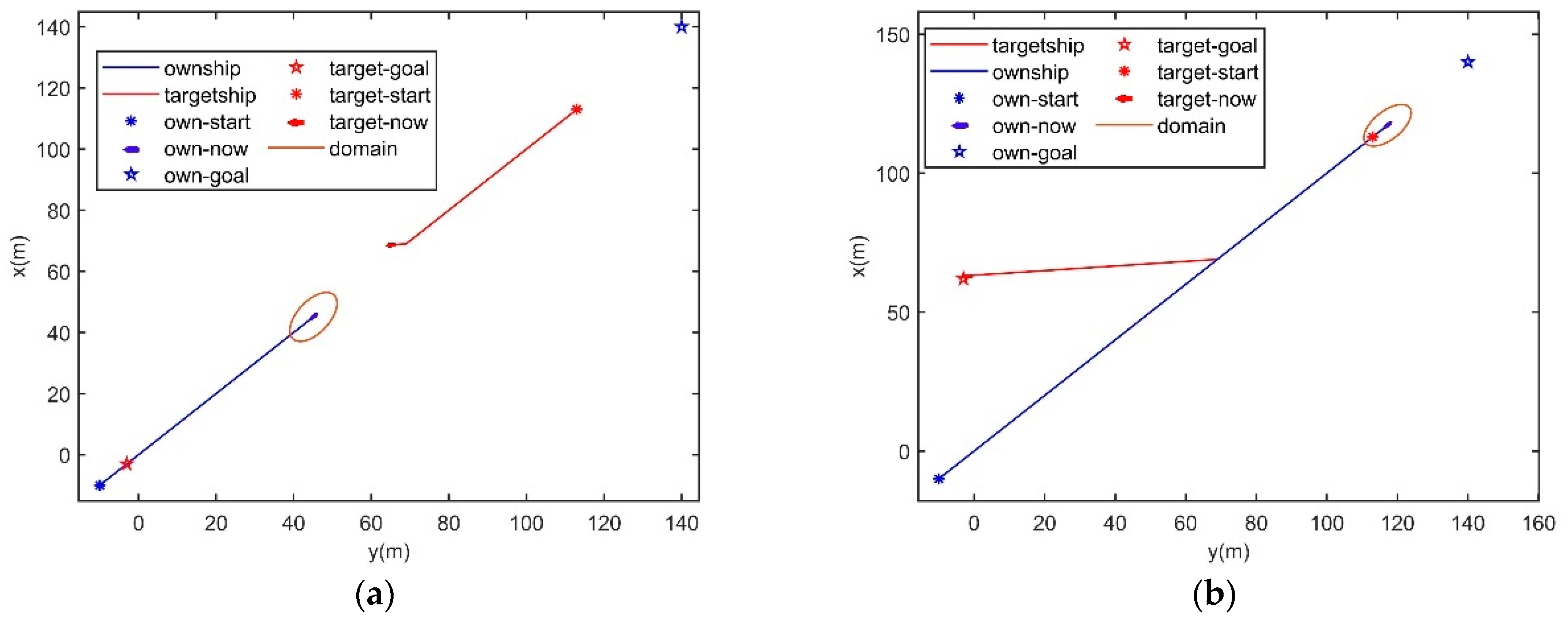
- IQMPC is implemented for autonomous collision avoidance. IQMPC can calculate an optimal trajectory based on the intention data of the target ship, employing a nonlinear ship dynamics model and operational constraints. We constructed various encounter scenarios of head-on situations for simulation: the target ship in a close-quarter avoidance zone or an emergency avoidance zone, with or without the target ship’s intention data scenarios. And we also simulated the crossing and overtaking situations.
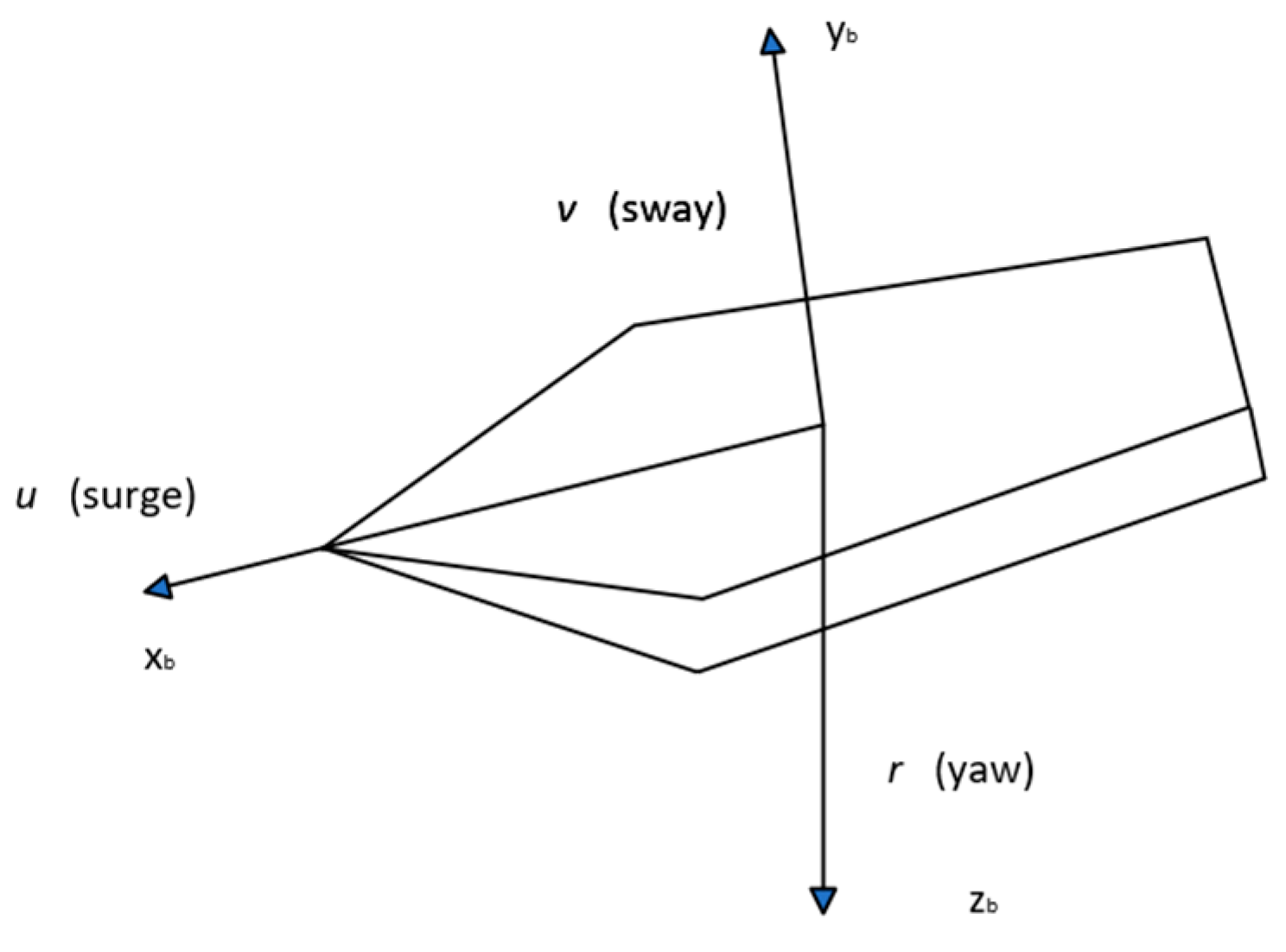
2. Ship Dynamics Model and COLREGs
2.1. Ship Dynamics Model
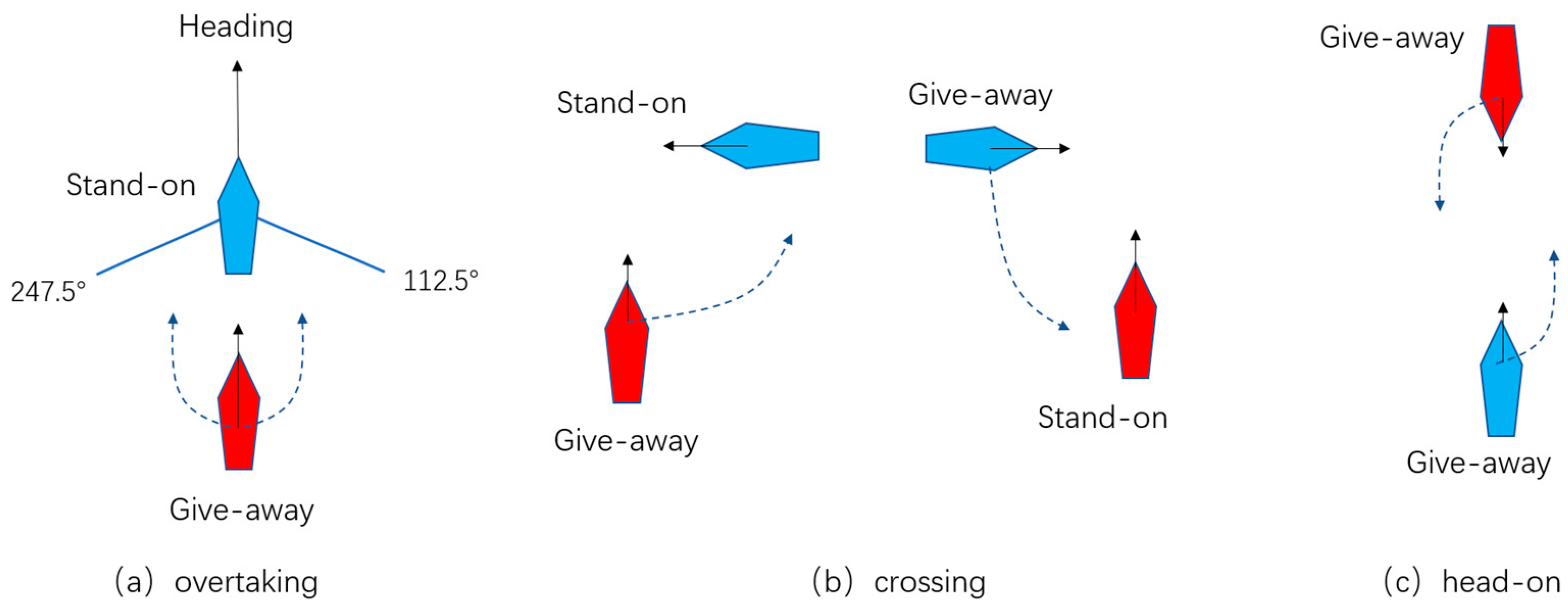
2.2. COLREGs
3. Collision Avoidance Using Intention Data and Quaternion Ship Domain Based on MPC
3.1. Intention Data of the Target Ship
3.2. Safety Zone Division
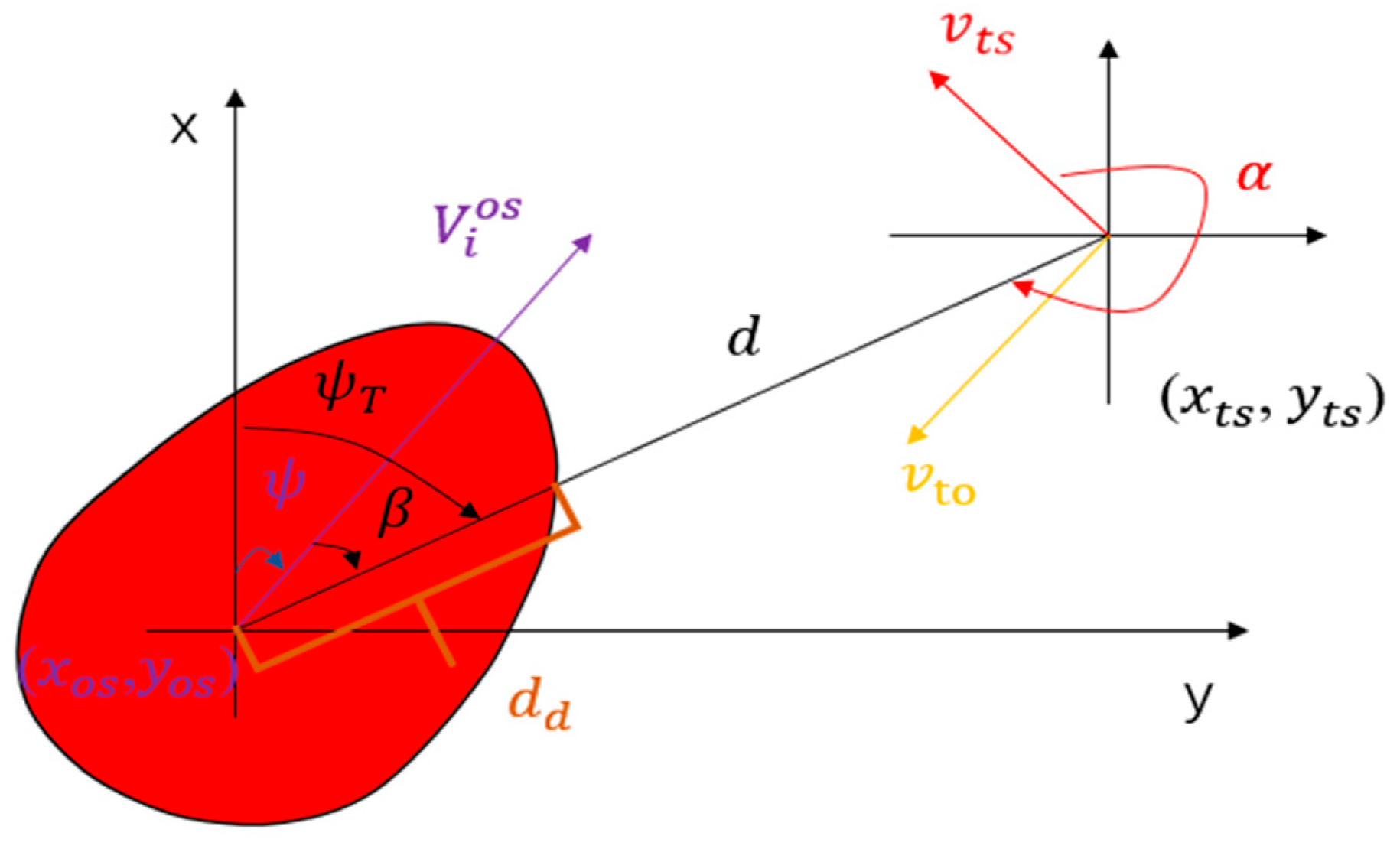
3.3. Collision Risk Evaluation and Prediction
3.4. IQMPC Collision Avoidance Algorithm
4. Simulation
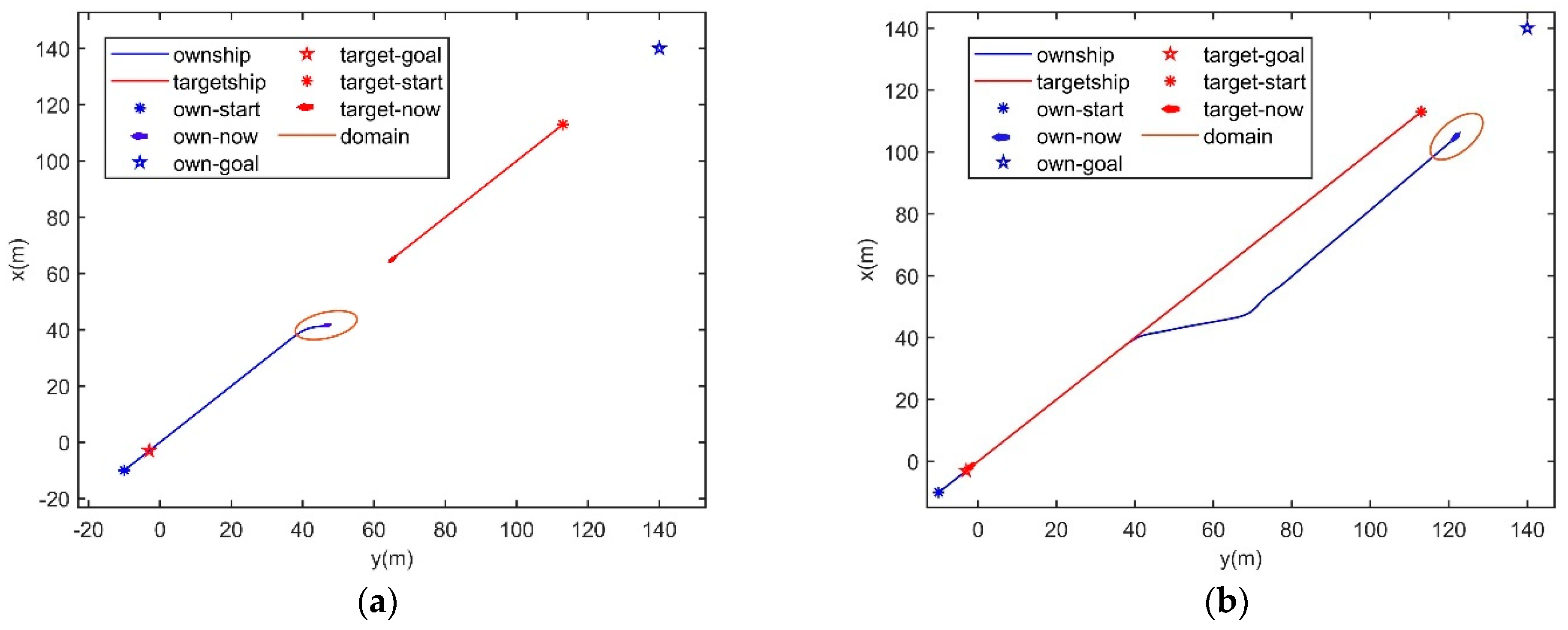
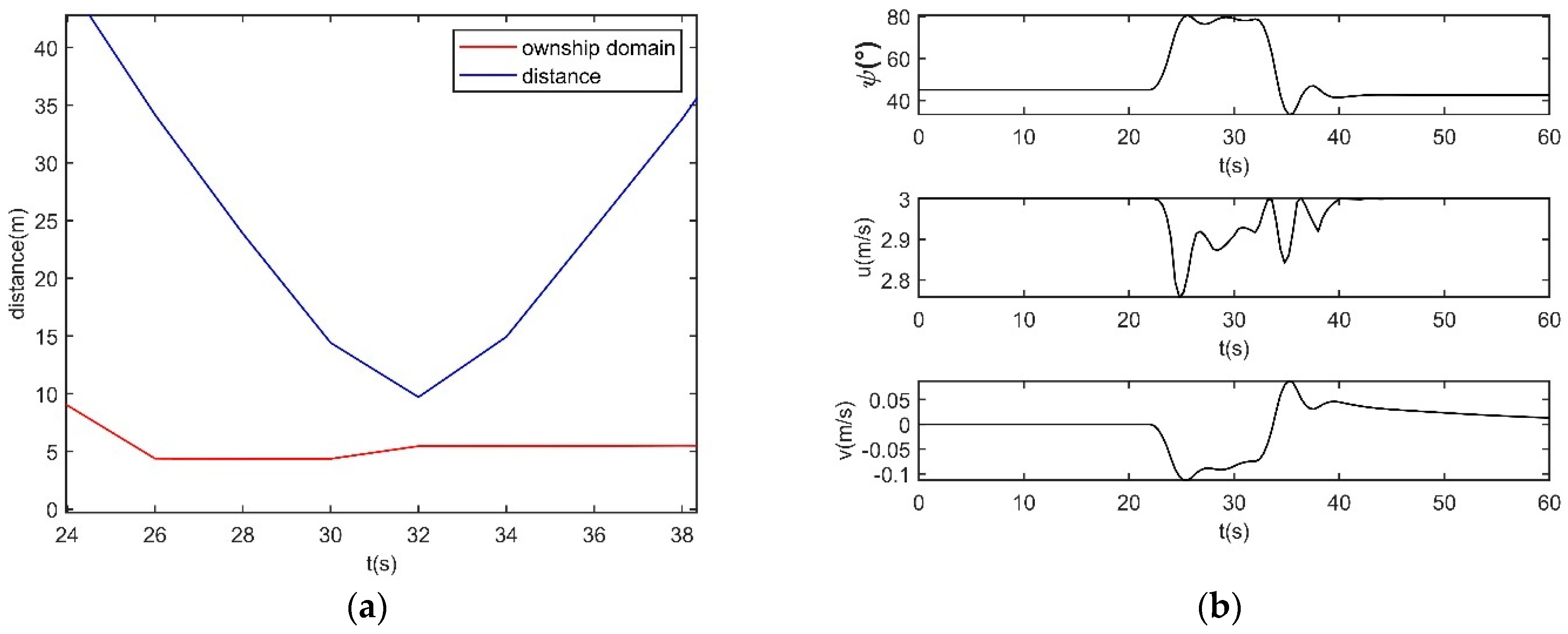
4.1. Close-Quarter Situation
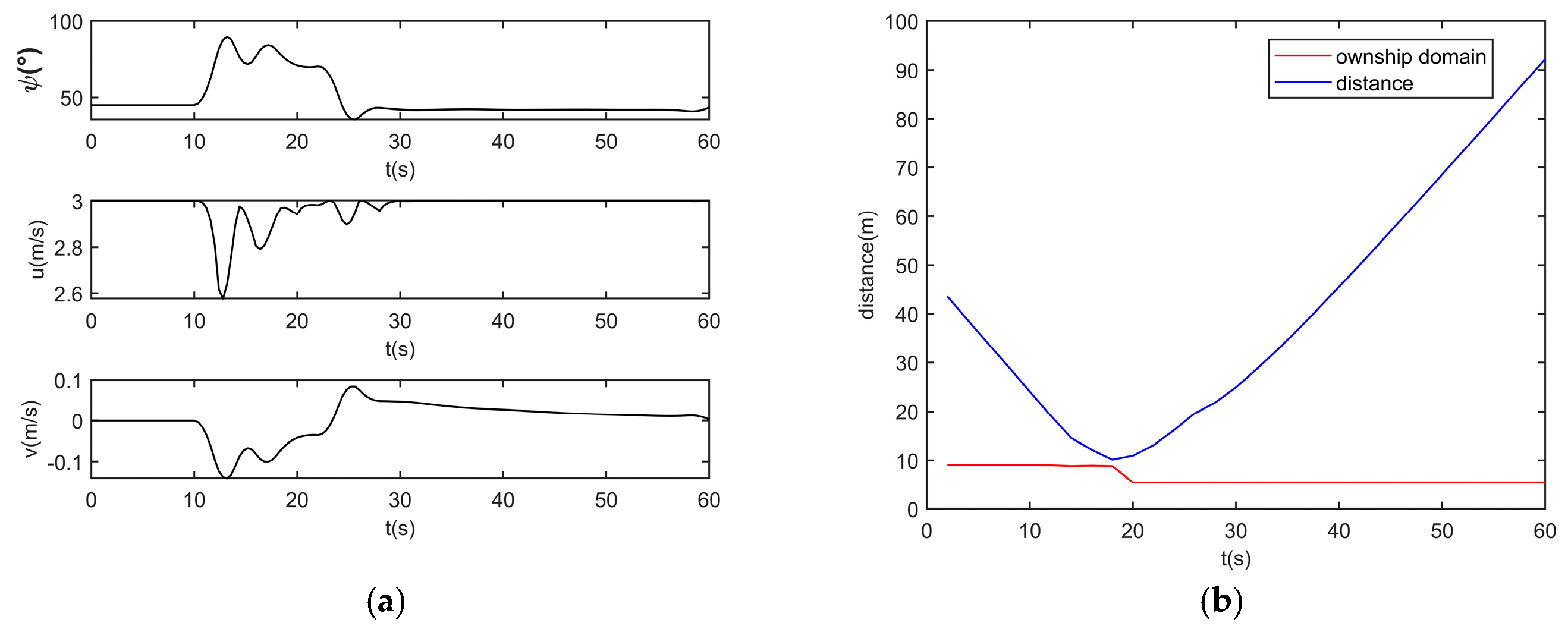
4.2. Immediate Danger Situation
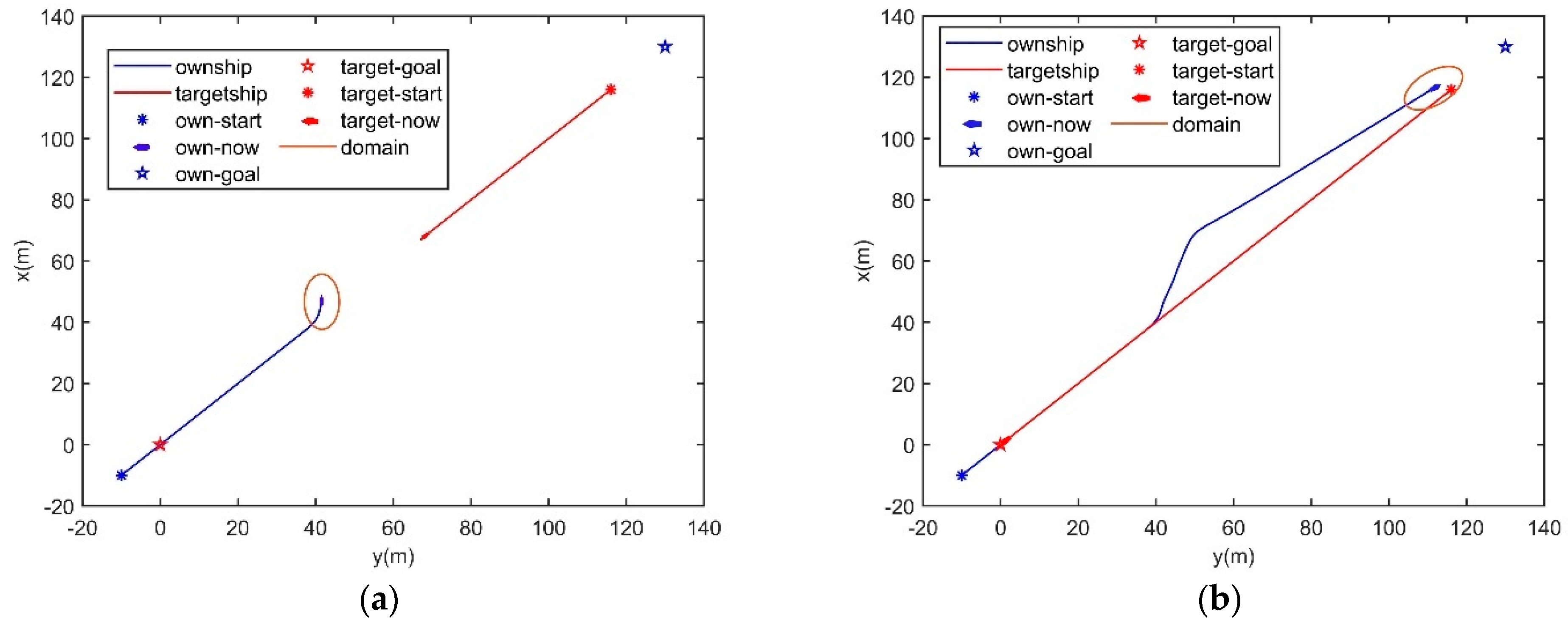
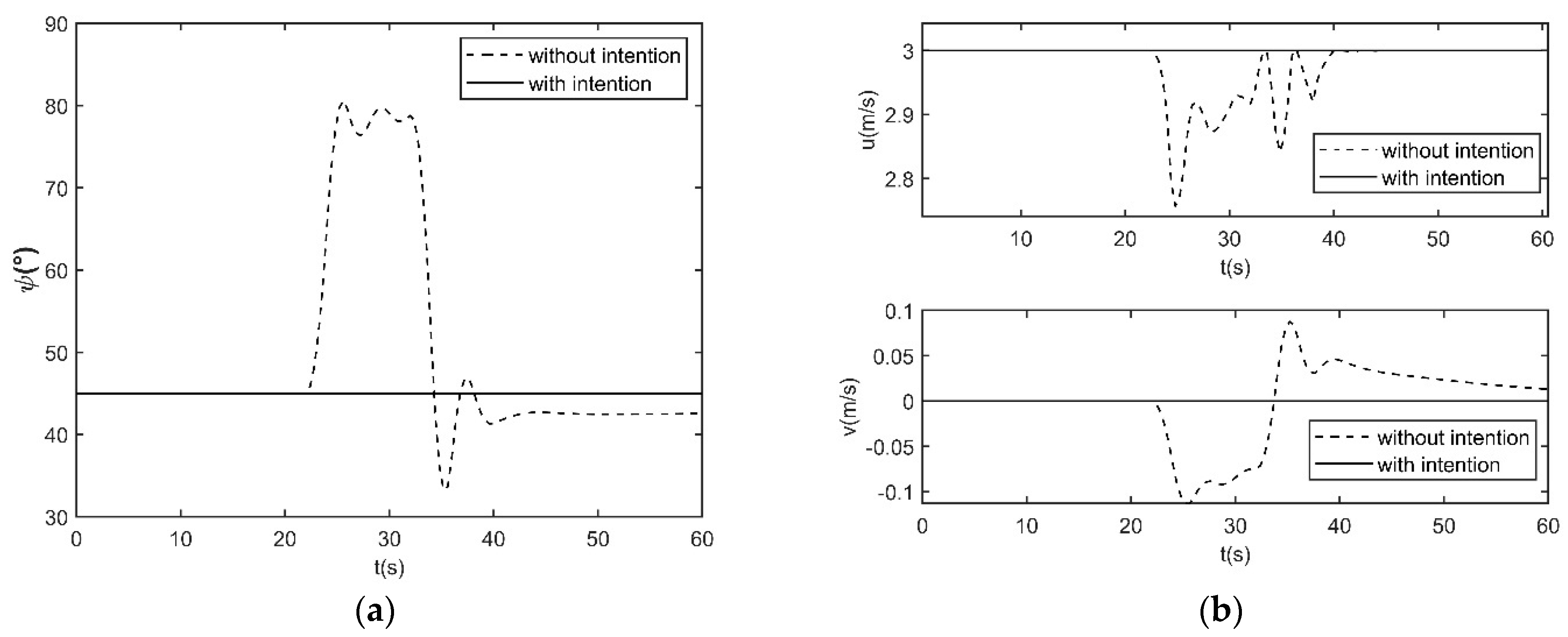
4.3. With or Without Intention Data
4.4. Overtaking
4.5. Crossing
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- EMSA. Annual Overview of Marine Casualties and Incidents. 2023, pp. 7–31. Available online: https://www.emsa.europa.eu/publications/item/5052-annual-overview-of-marine-casualties-and-incidents.html (accessed on 23 May 2024).
- International Maritime Organization. International Regulations for Preventing Collisions at Sea; International Maritime Organization: London, UK, 1972. [Google Scholar]
- Li, B.; Pang, F. An approach of vessel collision risk assessment based on the D–S evidence theory. Ocean Eng. 2013, 74, 16–21. [Google Scholar] [CrossRef]
- Chen, G.; Huang, Z.; Wang, W.; Yang, S. A novel dynamically adjusted entropy algorithm for collision avoidance in autonomous ships based on deep reinforcement learning. J. Mar. Sci. Eng. 2024, 12, 1562. [Google Scholar] [CrossRef]
- Zhang, J.; Fu, Z. A review of ship collision avoidance system. Sci. Technol. Eng. 2019, 19, 32–39. [Google Scholar]
- Woerner, K. Multi-Contact Protocol-Constrained collision avoidance for autonomous marine vehicles. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2016; pp. 294–301. [Google Scholar]
- Minne, P.K.E. Automatic Testing of Maritime Collision Avoidance Algorithms. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2017. [Google Scholar]
- Yim, J.; Park, D. Modeling evasive action to be implemented at the minimum distance for collision avoidance in a give-way situation. Ocean Eng. 2022, 263, 112210. [Google Scholar] [CrossRef]
- Gil, M. A concept of critical safety area applicable for an obstacle-avoidance process for manned and autonomous ships. Reliab. Eng. Syst. Saf. 2021, 214, 107806. [Google Scholar] [CrossRef]
- Filip, Z.; Mateusz, G.; Jakub, M. Declarative ship arenas under favourable conditions. Ocean Eng. 2025, 316, 119927. [Google Scholar]
- Fujii. Traffic capacity. J. Navig. 1971, 24, 543–552. [Google Scholar] [CrossRef]
- Goodwin, E. A statistical study of ship domains. J. Navig. 1975, 28, 328–344. [Google Scholar] [CrossRef]
- Wang, N. A novel analytical framework for dynamic quaternion ship domains. J. Navig. 2012, 66, 265–281. [Google Scholar] [CrossRef]
- Zhang, L.; Meng, Q. Probabilistic ship domain with applications to ship collision risk assessment. Ocean. Eng. 2019, 186, 106130. [Google Scholar] [CrossRef]
- Silveira, P.; Teixeira, A.P.; Soares, C.G. A method to extract the Quaternion Ship Domain parameters from AIS data. Ocean. Eng. 2022, 257, 111568. [Google Scholar] [CrossRef]
- Khatib, O. Real-Time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Lv, H. Research on Multi Vessel Collision Avoidance Decision and Path Planning Based on Electronic Charts. Ph.D. Thesis, Dalian Maritime University, Dalian, China, 2019. [Google Scholar]
- Kuwata, Y.; Wolf, M.T.; Zarzhitsky, D. Safe maritime autonomous navigation with COLREGS, using Velocity Obstacles. IEEE J. Ocean. Eng. 2014, 39, 110–119. [Google Scholar] [CrossRef]
- Zheng, H.; Zhu, J.; Liu, C.; Dai, H. Regulation aware dynamic path planning for intelligent ships with uncertain velocity obstacles. Ocean Eng. 2023, 278, 114401. [Google Scholar] [CrossRef]
- Yu, D.; Roh, M. Method for anti-collision path planning using velocity obstacle and A* algorithms for maritime autonomous surface ship. Int. J. Nav. Archit. Ocean Eng. 2024, 16, 100586. [Google Scholar] [CrossRef]
- Johansen, T.A.; Perez, T.; Cristofaro, A. Ship collision avoidance and COLREGS compliance using Simulation-Based control behavior selection with predictive hazard assessment. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3407–3422. [Google Scholar] [CrossRef]
- Hagen, I.B.; Kufoalor, B.K.M.; Brekke, E.M. MPC-based collision avoidance strategy for existing marine vessel guidance systems. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation, Brisbane, QLD, Australia, 21–25 May 2018; pp. 7618–7623. [Google Scholar]
- Tengesdal, T.; Brekke, E.F.; Johansen, T.A. On collision risk assessment for autonomous ships using Scenario-Based-MPC. IFAC World Congr. 2020, 53, 14509–14516. [Google Scholar]
- Zhu, M.; Skulstad, R.; Zhao, L.; Zhang, H. MPC-based path planning for ship collision avoidance under COLREGS. In Proceedings of the 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Prague, Czech Republic, 9–12 October 2022; pp. 930–1935. [Google Scholar]
- Tang, Y.; Chen, L.; Mou, J.; Chen, P. Robust Model Predictive Control for Ship Collision Avoidance under Multiple Uncertainties. IEEE Trans. Transp. Electrif. 2024, 10, 10374–10387. [Google Scholar] [CrossRef]
- Liu, C.; Chu, X.; Wu, W.; Li, S. Human–machine cooperation research for navigation of maritime autonomous surface ships: A review and consideration. Ocean Eng. 2022, 246, 110555. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, C.; Jiang, L. Collision-avoidance navigation systems for Maritime Autonomous Surface Ships: A state of the art survey. Ocean Eng. 2021, 235, 109380. [Google Scholar] [CrossRef]
- Kjerstad, K. Collision avoidance system for ships utilizing other vessels’ intentions. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2020. [Google Scholar]
- Akdağ, M.; Fossen, T.I.; Johansen, T.A. Collaborative collision avoidance for autonomous ships using informed Scenario-Based Model Predictive Control. IFAC Pap. 2022, 55, 249–256. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Cao, Y.; Shan, Q.; Sun, Y. Collision Avoidance for Maritime Autonomous Surface Ships Based on Model Predictive Control Using Intention Data and Quaternion Ship Domain. J. Mar. Sci. Eng. 2025, 13, 124. https://doi.org/10.3390/jmse13010124
Zhang H, Cao Y, Shan Q, Sun Y. Collision Avoidance for Maritime Autonomous Surface Ships Based on Model Predictive Control Using Intention Data and Quaternion Ship Domain. Journal of Marine Science and Engineering. 2025; 13(1):124. https://doi.org/10.3390/jmse13010124
Chicago/Turabian StyleZhang, Hanxuan, Yuchi Cao, Qihe Shan, and Yukun Sun. 2025. "Collision Avoidance for Maritime Autonomous Surface Ships Based on Model Predictive Control Using Intention Data and Quaternion Ship Domain" Journal of Marine Science and Engineering 13, no. 1: 124. https://doi.org/10.3390/jmse13010124
APA StyleZhang, H., Cao, Y., Shan, Q., & Sun, Y. (2025). Collision Avoidance for Maritime Autonomous Surface Ships Based on Model Predictive Control Using Intention Data and Quaternion Ship Domain. Journal of Marine Science and Engineering, 13(1), 124. https://doi.org/10.3390/jmse13010124