Infragravity Wave Oscillation Forecasting in a Shallow Estuary


Abstract
1. Introduction
2. Materials and Methods
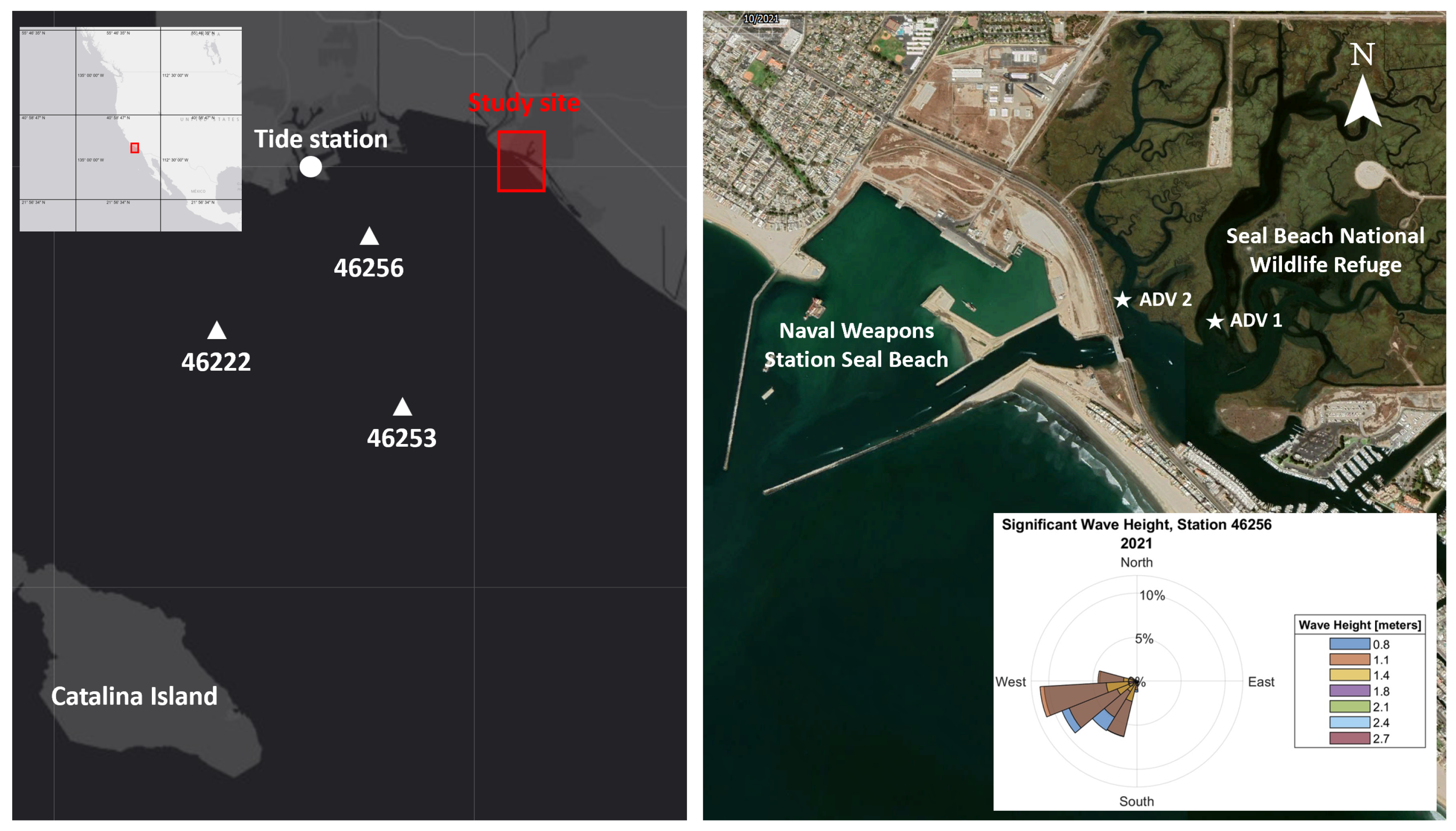
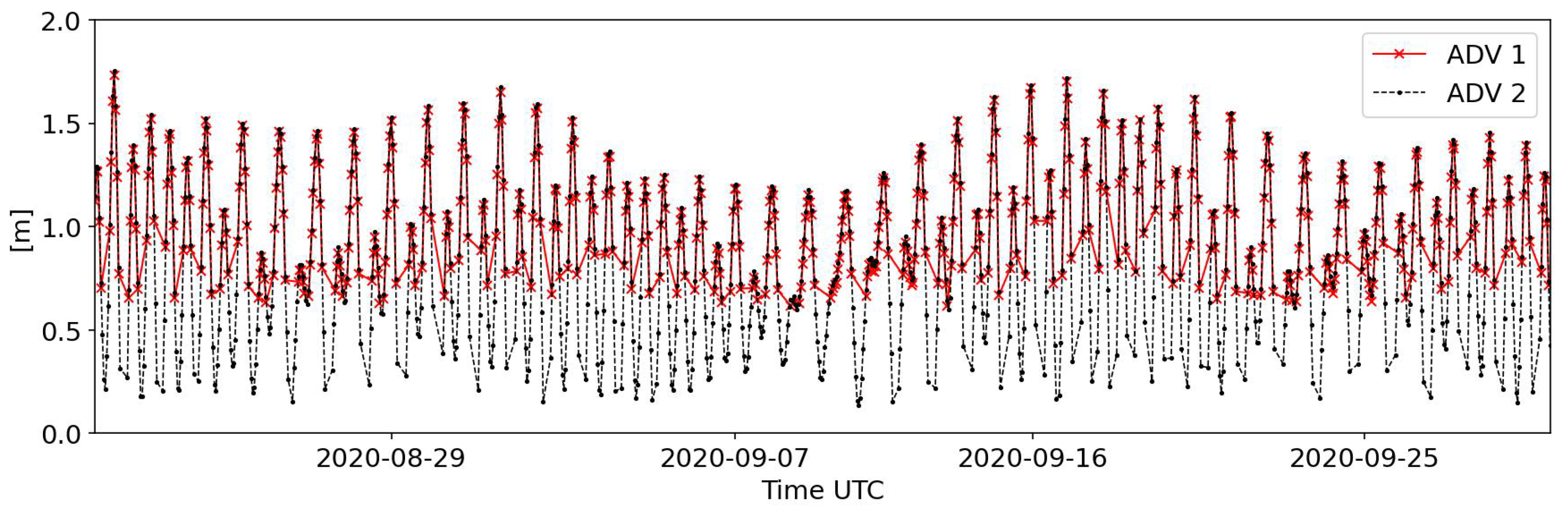
2.1. Study Area and Data Acquisition
2.2. Data Preparation
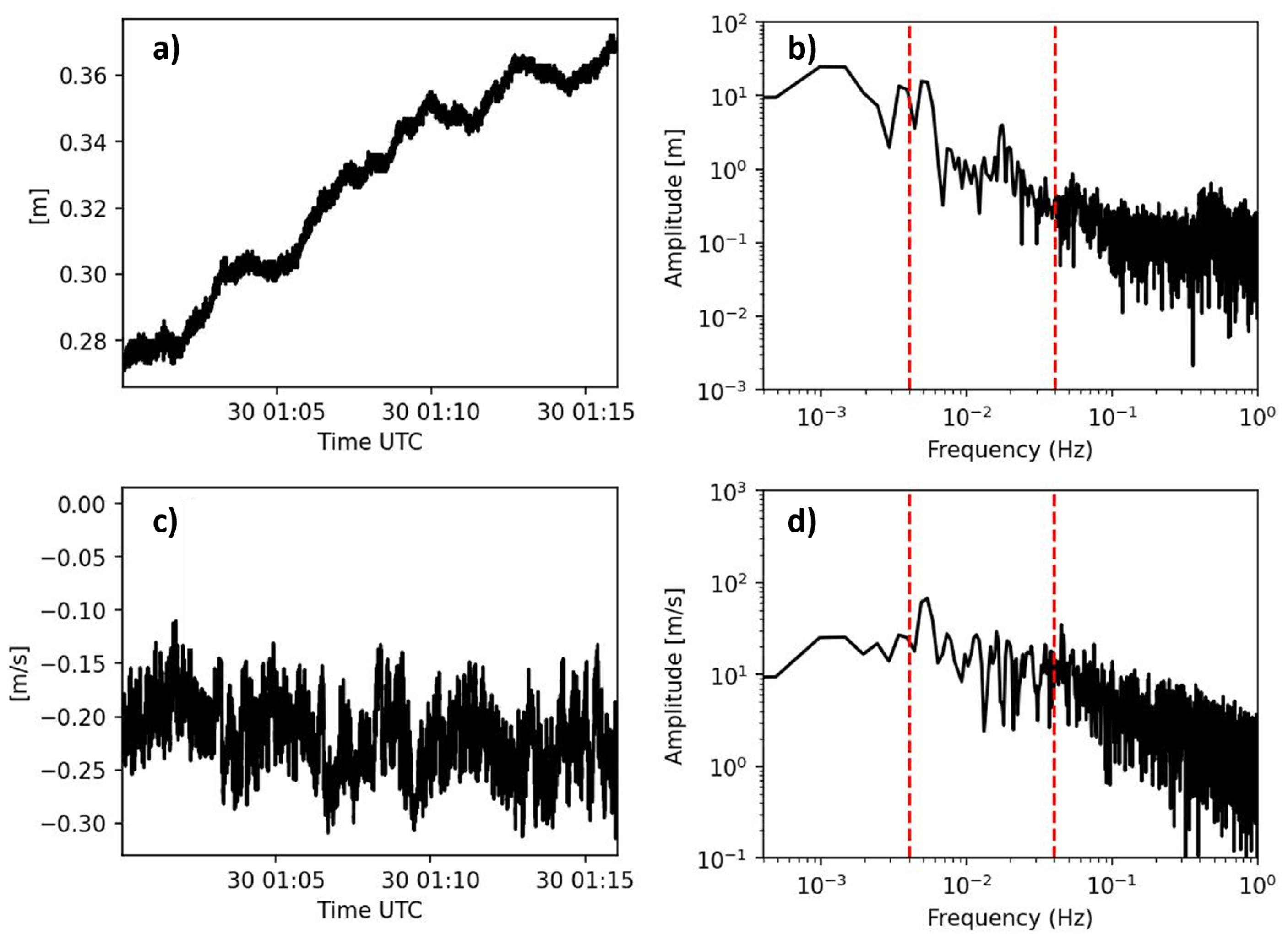
2.3. Signal Processing
2.4. Machine Learning
3. Results
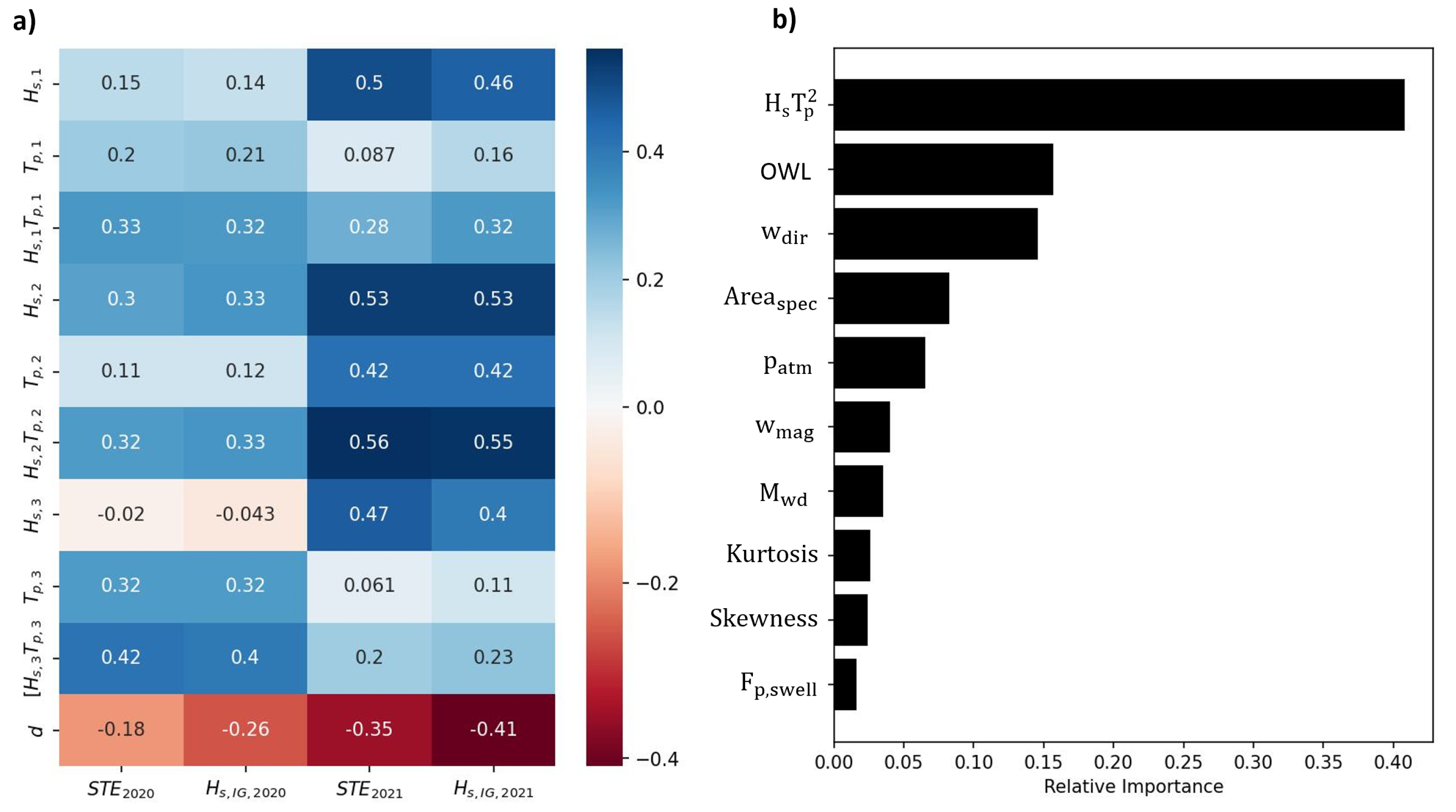
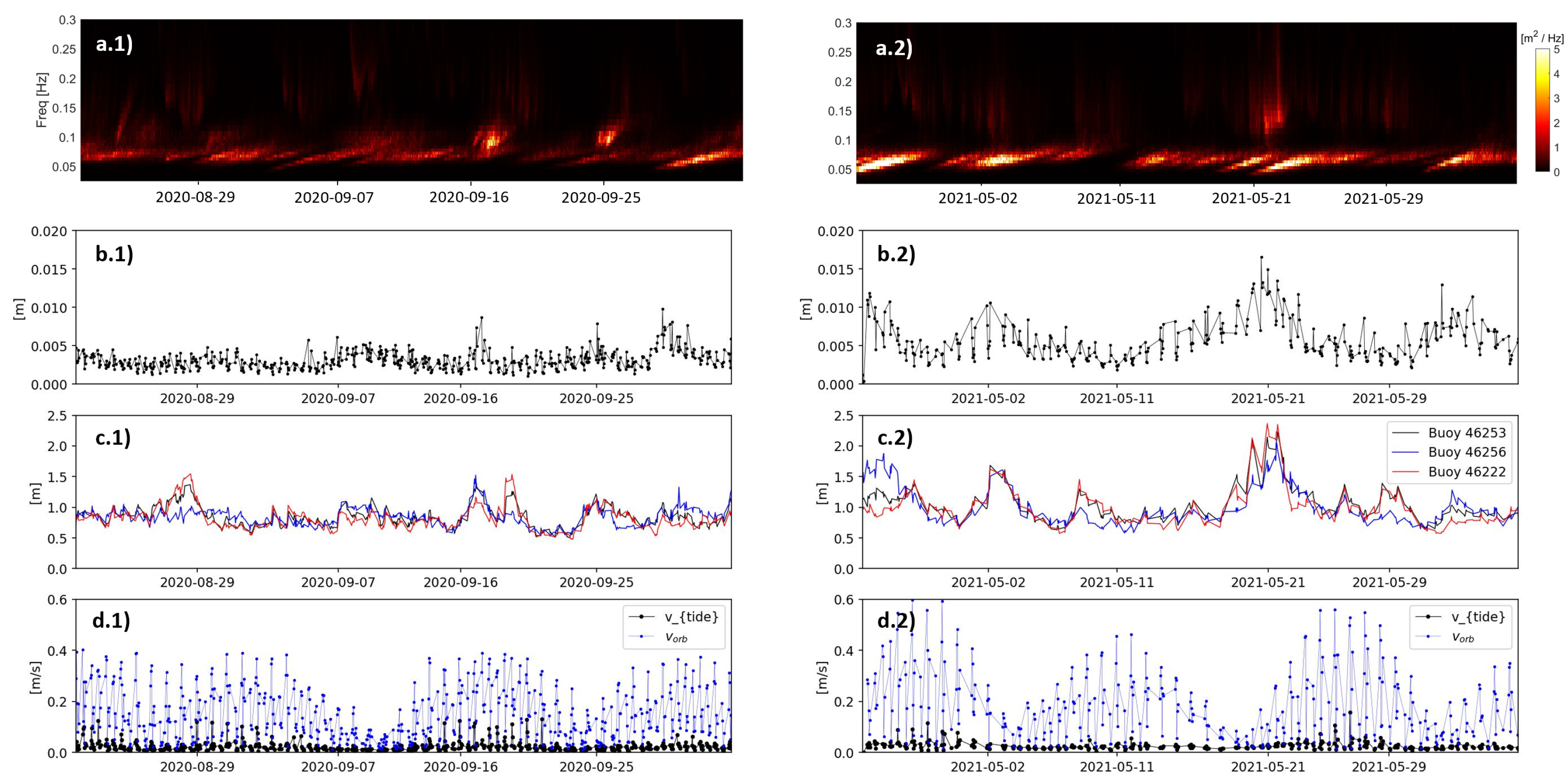
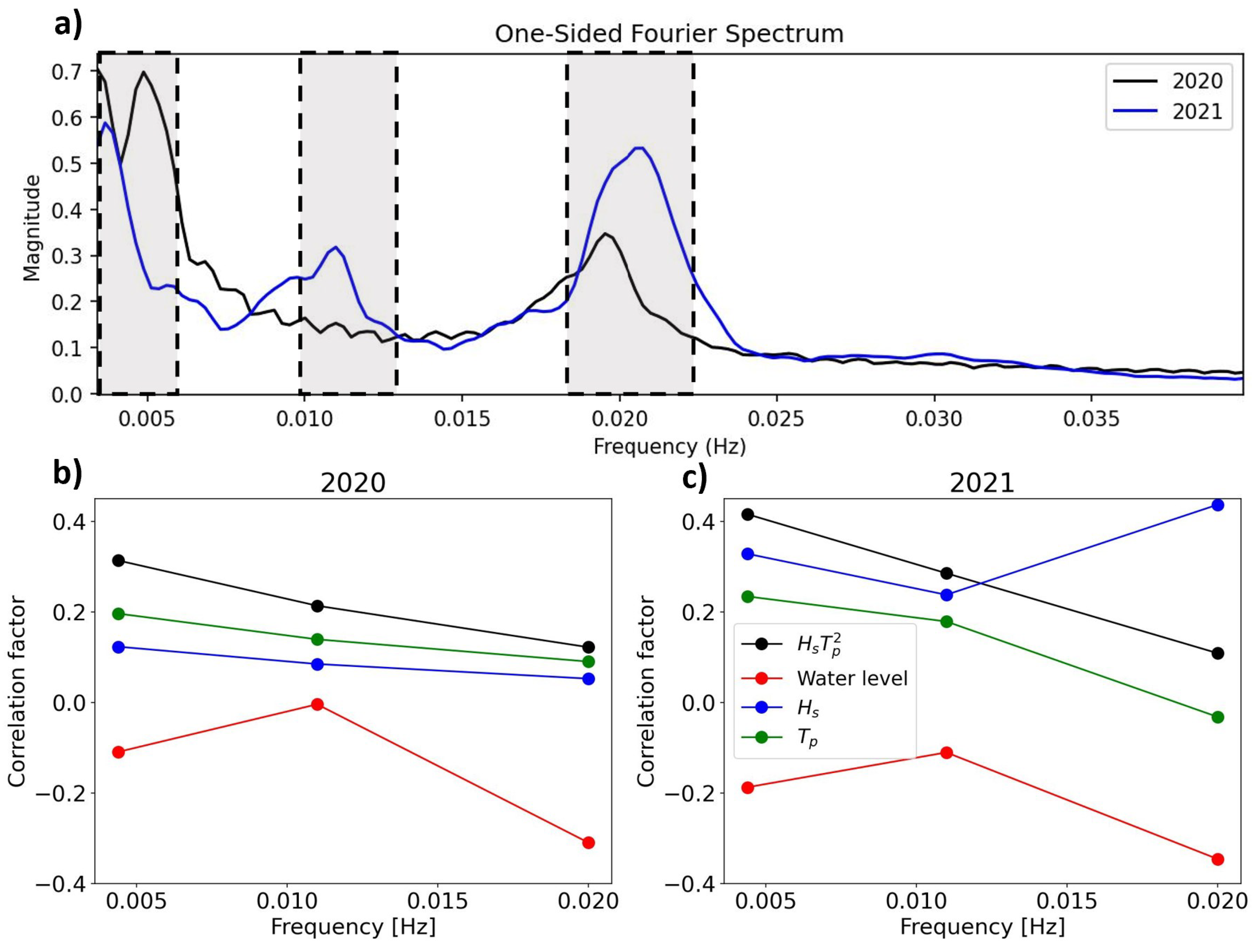
3.1. Infragravity Correlations and Orbital Velocities
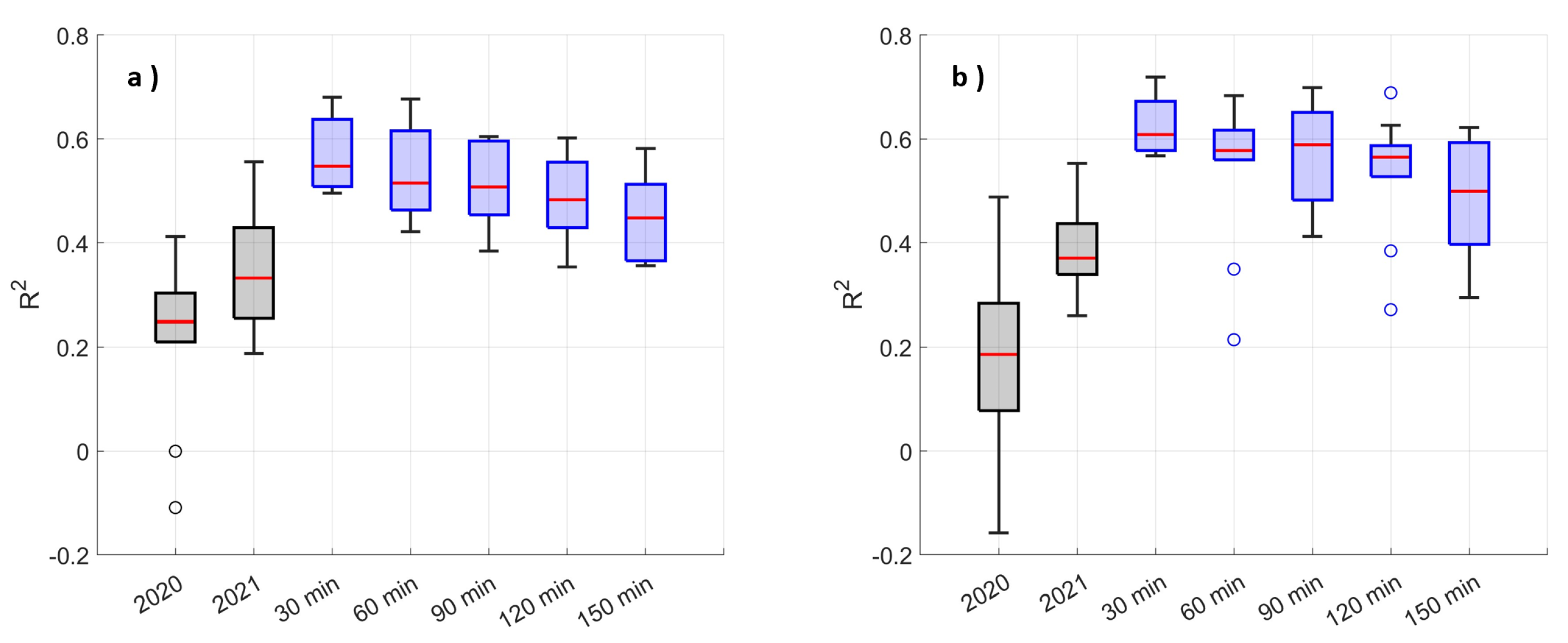
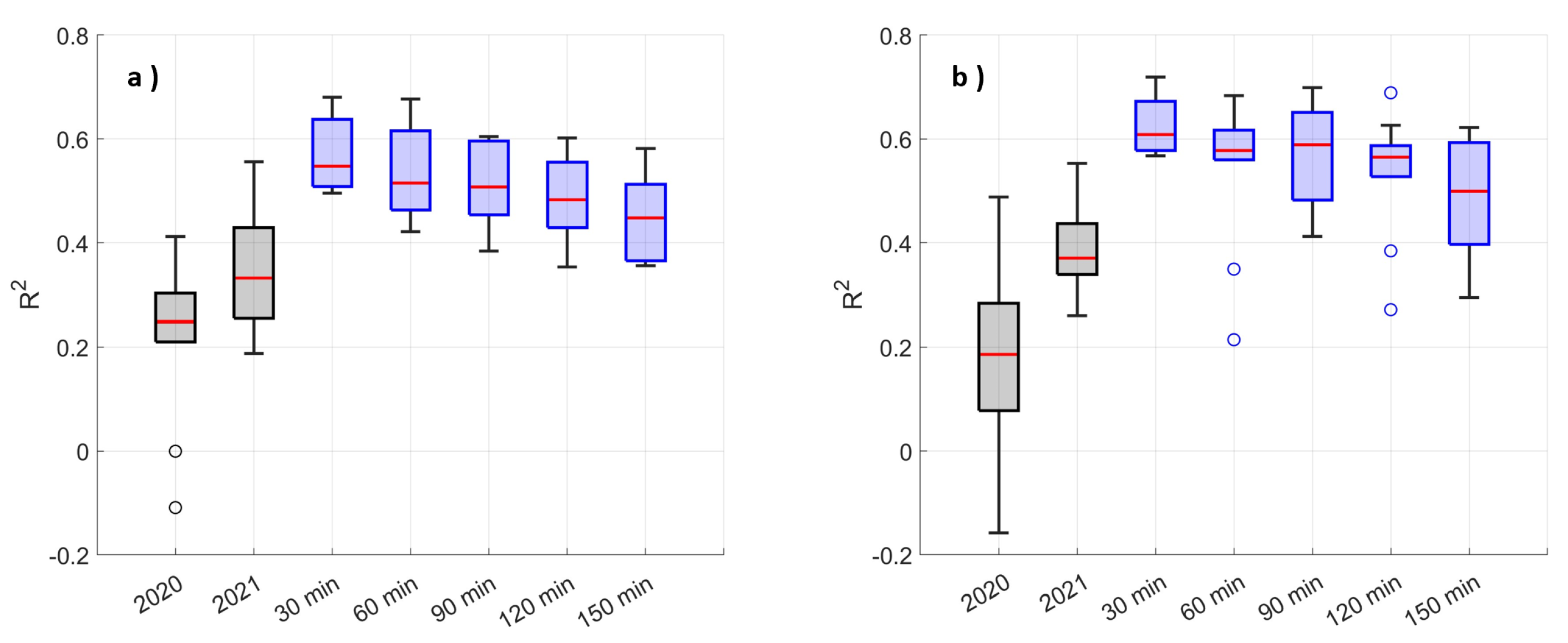
3.2. Infragravity Predictions
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| NOAA | National Oceanic and Atmospheric Administration |
| CDIP | Coastal Data Information Program |
References
- Taherkhani, M.; Vitousek, S.; Walter, R.K.; O’Leary, J.; Khodadoust, A.P. Flushing time variability in a short, low-inflow estuary. Estuar. Coast. Shelf Sci. 2023, 284, 108277. [Google Scholar] [CrossRef]
- Zedler, J.B.; Kercher, S. Wetland resources: Status, trends, ecosystem services, and restorability. Annu. Rev. Environ. Resour. 2005, 30, 39–74. [Google Scholar] [CrossRef]
- Mendes, D.; Fortunato, A.B.; Bertin, X.; Martins, K.; Lavaud, L.; Silva, A.N.; Pires-Silva, A.A.; Coulombier, T.; Pinto, J.P. Importance of infragravity waves in a wave-dominated inlet under storm conditions. Cont. Shelf Res. 2020, 192, 104026. [Google Scholar] [CrossRef]
- Harvey, M.E.; Giddings, S.N.; Pawlak, G.; Crooks, J.A. Hydrodynamic Variability of an Intermittently Closed Estuary over Interannual, Seasonal, Fortnightly, and Tidal Timescales. Estuaries Coasts 2022, 46, 84–108. [Google Scholar] [CrossRef]
- Largier, J.L. Recognizing Low-Inflow Estuaries as a Common Estuary Paradigm. Estuaries Coasts 2023, 46, 1949–1970. [Google Scholar] [CrossRef]
- McSweeney, S.L.; Stout, J.C.; Kennedy, D.M. Variability in infragravity wave processes during estuary artificial entrance openings. Earth Surf. Process. Landforms 2020, 45, 3414–3428. [Google Scholar] [CrossRef]
- Duong, T.M.; Ranasinghe, R.; Walstra, D.; Roelvink, D. Assessing climate change impacts on the stability of small tidal inlet systems: Why and how? Earth-Sci. Rev. 2016, 154, 369–380. [Google Scholar] [CrossRef]
- Munk, W. Surf beats. EOS Trans. Am. Geophys. Union 1949, 30, 849–854. [Google Scholar]
- Aagaard, T.; Greenwood, B.; Hughes, M. Sediment transport on dissipative, intermediate and reflective beaches. Earth-Sci. Rev. 2013, 124, 32–50. [Google Scholar] [CrossRef]
- Costas, R.; Carro, H.; Figuero, A.; Peña, E.; Sande, J. A Decision-Making Tool for Port Operations Based on Downtime Risk and Met-Ocean Conditions including Infragravity Wave Forecast. J. Mar. Sci. Eng. 2023, 11, 536. [Google Scholar] [CrossRef]
- Uncles, R.; Stephens, J.; Harris, C. Infragravity currents in a small ría: Estuary-amplified coastal edge waves? Estuar. Coast. Shelf Sci. 2014, 150, 242–251. [Google Scholar] [CrossRef]
- Okihiro, M.; Guza, R. Observations of seiche forcing and amplification in three small harbors. J. Waterw. Port Coastal Ocean Eng. 1996, 122, 232–238. [Google Scholar] [CrossRef]
- Rabinovich, A.B. Seiches and harbor oscillations. In Handbook of Coastal and Ocean Engineering; World Scientific: Singapore, 2010; pp. 193–236. [Google Scholar]
- López, M.; Iglesias, G. Artificial intelligence for estimating infragravity energy in a harbour. Ocean Eng. 2013, 57, 56–63. [Google Scholar] [CrossRef]
- Tucker, M. Surf beats: Sea waves of 1 to 5 min. period. Proc. R. Soc. London. Ser. A. Math. Phys. Sci. 1950, 202, 565–573. [Google Scholar]
- Bowers, E. Harbour resonance due to set-down beneath wave groups. J. Fluid Mech. 1977, 79, 71–92. [Google Scholar] [CrossRef]
- Elgar, S.; Herbers, T.; Okihiro, M.; Oltman-Shay, J.; Guza, R. Observations of infragravity waves. J. Geophys. Res. Ocean. 1992, 97, 15573–15577. [Google Scholar] [CrossRef]
- Herbers, T.; Elgar, S.; Guza, R. Generation and propagation of infragravity waves. J. Geophys. Res. Ocean. 1995, 100, 24863–24872. [Google Scholar] [CrossRef]
- Williams, M.E.; Stacey, M.T. Tidally discontinuous ocean forcing in bar-built estuaries: The interaction of tides, infragravity motions, and frictional control. J. Geophys. Res. Ocean. 2016, 121, 571–585. [Google Scholar] [CrossRef]
- Bertin, X.; de Bakker, A.; Van Dongeren, A.; Coco, G.; André, G.; Ardhuin, F.; Bonneton, P.; Bouchette, F.; Castelle, B.; Crawford, W.C.; et al. Infragravity waves: From driving mechanisms to impacts. Earth-Sci. Rev. 2018, 177, 774–799. [Google Scholar] [CrossRef]
- Baldock, T.; Huntley, D.; Bird, P.; O’hare, T.; Bullock, G. Breakpoint generated surf beat induced by bichromatic wave groups. Coast. Eng. 2000, 39, 213–242. [Google Scholar] [CrossRef]
- Stiassnie, M.; Drimer, N. Prediction of long forcing waves for harbor agitation studies. J. Waterw. Port Coastal, Ocean Eng. 2006, 132, 166–171. [Google Scholar] [CrossRef]
- Bellotti, G. Transient response of harbours to long waves under resonance conditions. Coast. Eng. 2007, 54, 680–693. [Google Scholar] [CrossRef]
- Melito, I.; Cuomo, G.; Bellotti, G.; Franco, L. Field measurements of harbour resonance at Marina di Carrara. In Coastal Engineering 2006: (In 5 Volumes); World Scientific: Singapore, 2007; pp. 1280–1292. [Google Scholar]
- Bertin, X.; Olabarrieta, M. Relevance of infragravity waves in a wave-dominated inlet. J. Geophys. Res. Ocean. 2016, 121, 5418–5435. [Google Scholar] [CrossRef]
- Bowers, E. Low frequency waves in intermediate water depths. In Coastal Engineering 1992; HR Wallingford: Oxfordshire, UK, 1992; pp. 832–845. [Google Scholar]
- Melito, L.; Postacchini, M.; Sheremet, A.; Calantoni, J.; Zitti, G.; Darvini, G.; Brocchini, M. Wave-current interactions and infragravity wave propagation at a microtidal inlet. Proceedings 2018, 2, 628. [Google Scholar] [CrossRef]
- Wheeler, D.C.; Giddings, S.N. Measuring Turbulent Dissipation with Acoustic Doppler Velocimeters in the Presence of Large, Intermittent, Infragravity Frequency Bores. J. Atmos. Ocean. Technol. 2023, 40, 285–304. [Google Scholar] [CrossRef]
- Bertin, X.; Mendes, D.; Martins, K.; Fortunato, A.B.; Lavaud, L. The closure of a shallow tidal inlet promoted by infragravity waves. Geophys. Res. Lett. 2019, 46, 6804–6810. [Google Scholar] [CrossRef]
- Bromirski, P. Climate-Induced Decadal Ocean Wave Height Variability From Microseisms: 1931–2021. J. Geophys. Res. Ocean. 2023, 128, e2023JC019722. [Google Scholar] [CrossRef]
- Oh, J.; Suh, K.D. Real-time forecasting of wave heights using EOF–wavelet–neural network hybrid model. Ocean Eng. 2018, 150, 48–59. [Google Scholar] [CrossRef]
- Granata, F.; Di Nunno, F. Artificial Intelligence models for prediction of the tide level in Venice. Stoch. Environ. Res. Risk Assess. 2021, 35, 2537–2548. [Google Scholar] [CrossRef]
- Williams, B. Predicting infragravity wave height in harbours using artificial intelligence. In Proceedings of the Australasian Coasts and Ports 2019 Conference: Future directions from 40 [degrees] S and beyond, Hobart, Australia, 10–13 September 2019; Engineers Australia Hobart: Hobart, TAS, Australia, 2019; pp. 1226–1232. [Google Scholar]
- Zheng, Z.; Ma, X.; Ma, Y.; Dong, G. Wave estimation within a port using a fully nonlinear Boussinesq wave model and artificial neural networks. Ocean Eng. 2020, 216, 108073. [Google Scholar] [CrossRef]
- Zheng, Z.; Ma, X.; Huang, X.; Ma, Y.; Dong, G. Wave forecasting within a port using WAVEWATCH III and artificial neural networks. Ocean Eng. 2022, 255, 111475. [Google Scholar] [CrossRef]
- Adams, P.N.; Inman, D.L.; Graham, N.E. Southern California deep-water wave climate: Characterization and application to coastal processes. J. Coast. Res. 2008, 24, 1022–1035. [Google Scholar] [CrossRef]
- Masselink, G.; Tuck, M.; McCall, R.; van Dongeren, A.; Ford, M.; Kench, P. Physical and numerical modeling of infragravity wave generation and transformation on coral reef platforms. J. Geophys. Res. Ocean. 2019, 124, 1410–1433. [Google Scholar] [CrossRef]
- Greenwood, M.; Kinghorn, A. SUVing: Automatic Silence/Unvoiced/Voiced Classification of Speech; Undergraduate Coursework, Department of Computer Science, University of Sheffield: Sheffield, UK, 1999; Volume 4. [Google Scholar]
- Welch, P. The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef]
- Wiberg, P.L.; Sherwood, C.R. Calculating wave-generated bottom orbital velocities from surface-wave parameters. Comput. Geosci. 2008, 34, 1243–1262. [Google Scholar] [CrossRef]
- Alexopoulos, E.C. Introduction to multivariate regression analysis. Hippokratia 2010, 14, 23. [Google Scholar] [PubMed]
- Oh, J.; Suh, K.D.; Oh, S.H.; Jeong, W.M. Estimation of infragravity waves inside Pohang New Port. J. Coast. Res. 2016, 432–436. [Google Scholar] [CrossRef]
- Boser, B.E.; Guyon, I.M.; Vapnik, V.N. A training algorithm for optimal margin classifiers. In Proceedings of the Fifth Annual Workshop on Computational Learning Theory, Pittsburgh, PA, USA, 27–29 July 1992; pp. 144–152. [Google Scholar]
- Ho, T.K. Random decision forests. In Proceedings of the 3rd International Conference on Document Analysis and Recognition, Montreal, QC, Canada, 14–16 August 1995; Volume 1, pp. 278–282. [Google Scholar]
- Pasupa, K.; Sunhem, W. A comparison between shallow and deep architecture classifiers on small dataset. In Proceedings of the 2016 8th International Conference on Information Technology and Electrical Engineering (ICITEE), Yogyakarta, Indonesia, 5–6 October 2016; pp. 1–6. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Breiman, L. Classification and Regression Trees; Routledge: London, UK, 2017. [Google Scholar]
- Gomez, B.; Kadri, U. Earthquake source characterization by machine learning algorithms applied to acoustic signals. Sci. Rep. 2021, 11, 23062. [Google Scholar] [CrossRef]
- Stone, M. Cross-validatory choice and assessment of statistical predictions. J. R. Stat. Soc. Ser. B (Methodol.) 1974, 36, 111–133. [Google Scholar] [CrossRef]
- Stone, M. An asymptotic equivalence of choice of model by cross-validation and Akaike’s criterion. J. R. Stat. Soc. Ser. B (Methodol.) 1977, 39, 44–47. [Google Scholar] [CrossRef]
- Ardhuin, F.; Rawat, A.; Aucan, J. A numerical model for free infragravity waves: Definition and validation at regional and global scales. Ocean Model. 2014, 77, 20–32. [Google Scholar] [CrossRef]
- Nwogu, O.; Demirbilek, Z. Infragravity wave motions and runup over shallow fringing reefs. J. Waterw. Port Coastal Ocean Eng. 2010, 136, 295–305. [Google Scholar] [CrossRef]
- Harkins, G.S.; Briggs, M.J. Resonant forcing of harbors by infragravity waves. In Coastal Engineering 1994; Alexander Bell Drive: Reston, VA, USA, 1995; pp. 806–820. [Google Scholar]
- Rijnsdorp, D.P.; Reniers, A.J.; Zijlema, M. Free infragravity waves in the North Sea. J. Geophys. Res. Ocean. 2021, 126, e2021JC017368. [Google Scholar] [CrossRef]
- Su, S.F.; Ma, G.; Hsu, T.W. Boussinesq modeling of spatial variability of infragravity waves on fringing reefs. Ocean Eng. 2015, 101, 78–92. [Google Scholar] [CrossRef]
- González-Marco, D.; Sierra, J.P.; de Ybarra, O.F.; Sánchez-Arcilla, A. Implications of long waves in harbor management: The Gijón port case study. Ocean Coast. Manag. 2008, 51, 180–201. [Google Scholar] [CrossRef]
- Cuomo, G.; Guza, R. Infragravity seiches in a small harbor. J. Waterw. Port Coastal Ocean Eng. 2017, 143, 04017032. [Google Scholar] [CrossRef]
- Okihiro, M.; Guza, R.; Seymour, R. Excitation of seiche observed in a small harbor. J. Geophys. Res. Ocean. 1993, 98, 18201–18211. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Buoy 46,256 | Tide Station | Met. Station |
|---|---|---|
| (ms2) | OWL (m) | (Pa) |
| (Deg) | (m/s) | |
| (Deg) | ||
| (Hz) | ||
| (m2) | ||
|---|---|---|
| SVR | 0.575 | 2.094 |
| RFR | 0.643 | 1.864 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gomez, B.; Giddings, S.N.; Gallien, T. Infragravity Wave Oscillation Forecasting in a Shallow Estuary. J. Mar. Sci. Eng. 2024, 12, 672. https://doi.org/10.3390/jmse12040672
Gomez B, Giddings SN, Gallien T. Infragravity Wave Oscillation Forecasting in a Shallow Estuary. Journal of Marine Science and Engineering. 2024; 12(4):672. https://doi.org/10.3390/jmse12040672
Chicago/Turabian StyleGomez, Bernabe, Sarah N. Giddings, and Timu Gallien. 2024. "Infragravity Wave Oscillation Forecasting in a Shallow Estuary" Journal of Marine Science and Engineering 12, no. 4: 672. https://doi.org/10.3390/jmse12040672
APA StyleGomez, B., Giddings, S. N., & Gallien, T. (2024). Infragravity Wave Oscillation Forecasting in a Shallow Estuary. Journal of Marine Science and Engineering, 12(4), 672. https://doi.org/10.3390/jmse12040672