
Generative vs. Non-Generative Models in Engineering Shape Optimization

 ,
,  , ,
, ,  and
and 
Abstract
1. Introduction
- The generation of datasets with varying shape signature vectors (with and without augmentation with performance-based components).
- The performance of varying shape discretizations to quantify their effects as well as identify the ones that lead to data representations with enhanced quality.
- The deployment of both generative and non-generative models on the created datasets.
- The performance a comprehensive analysis of latent space quality to evaluate the efficacy of the implemented models in design optimization.
2. Methods
2.1. Shape-Supervised Dimension Reduction (SSDR)
2.1.1. SSV Augmentation—Geometric Moments
2.1.2. Latent Space Bounds
2.2. PaDGAN: Performance-Augmented Diverse Generative Adversarial Network
2.3. Dataset Generation
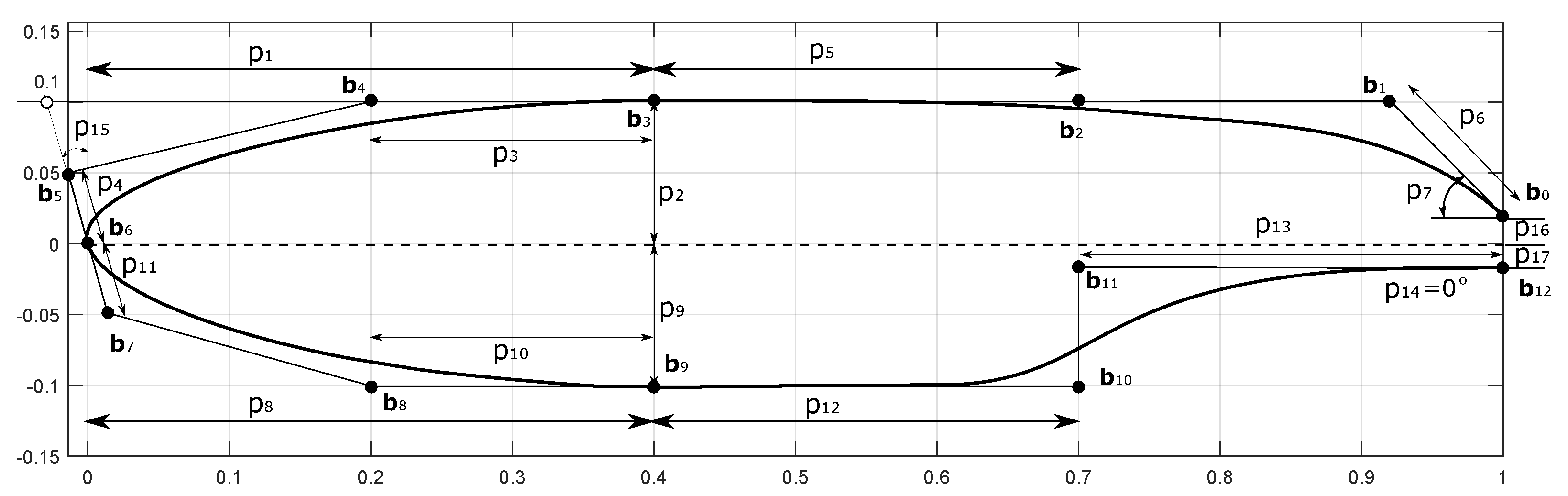
2.3.1. Parametric Model
2.3.2. Augmented Airfoil
2.3.3. Discretization
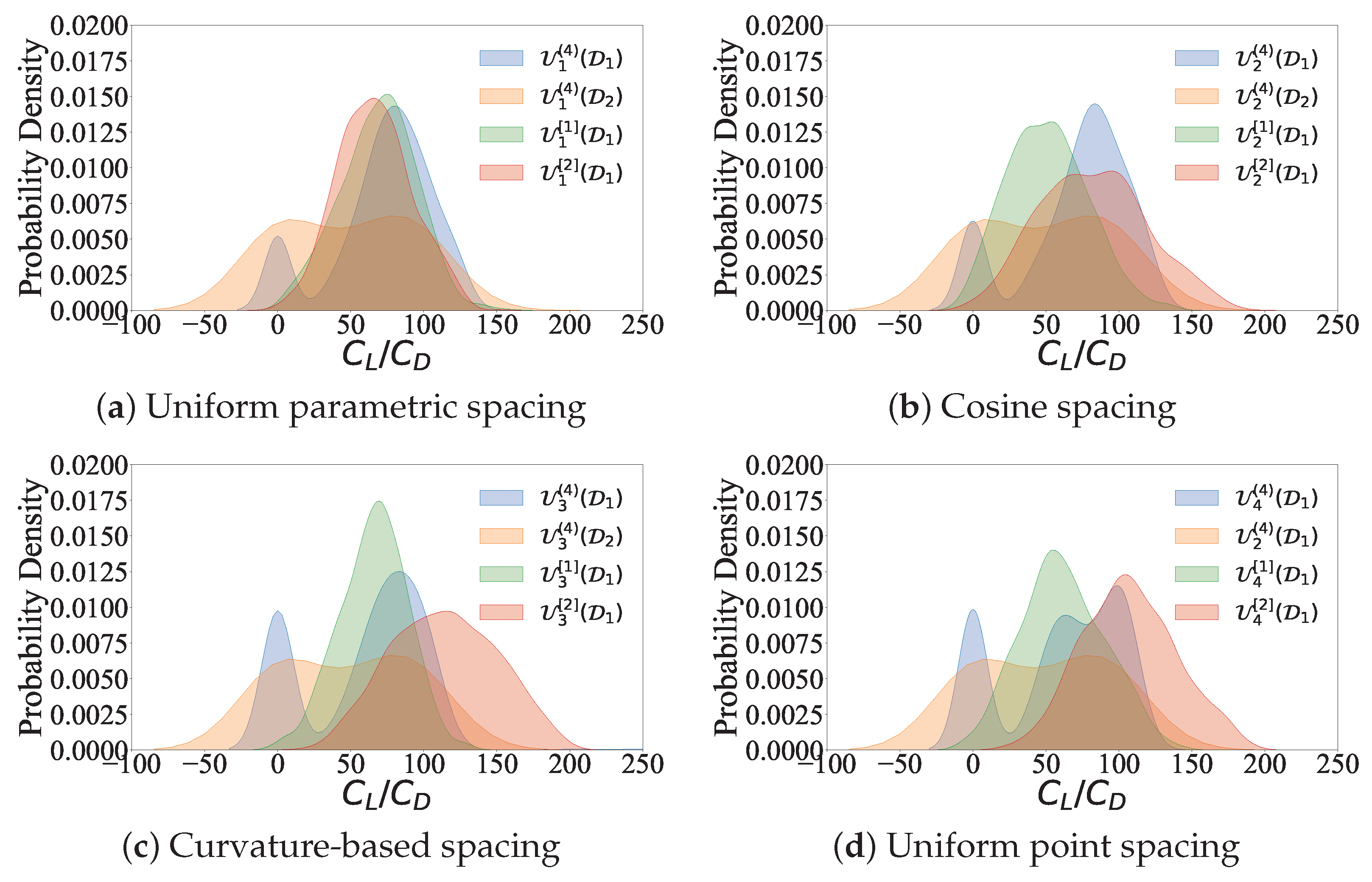
- Uniform Parametric Spacing: N parametric values, , uniformly distributed over the curve’s parametric domain are selected. The resulting N points, , are subsequently used in the curve encoding; see Figure 2a.
- Cosine Spacing: A re-parameterization of all NURBS curves using the cosine function is performed. This re-parameterization results in the concentration of the generated curve points near the leading and trailing edges of the profile; see Figure 2b.
- Curvature-Based Spacing: In this approach, the profile’s curvature is utilized to determine the distribution of parametric values. More precisely, parametric points are distributed to ensure an equal curvature integral across all parametric intervals. Consequently, this method leads to a significant point concentration near regions of high curvature, e.g., the leading edge region; see Figure 2c.
- Uniform Point Spacing: Finally, this approach discretizes the profile by computing segments of equal arc length on the curve; see Figure 2d.
2.4. Quality Analysis Metrics
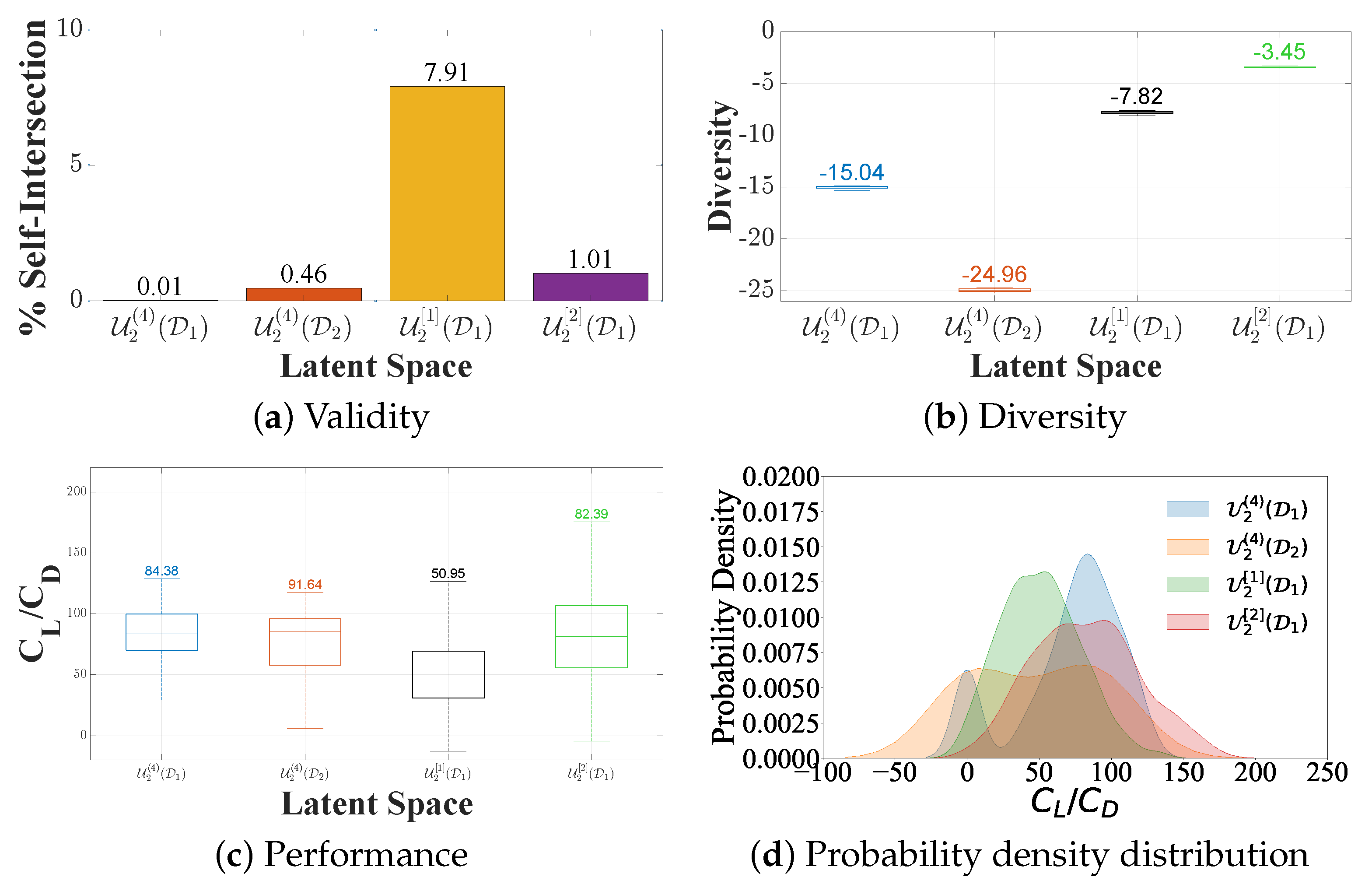
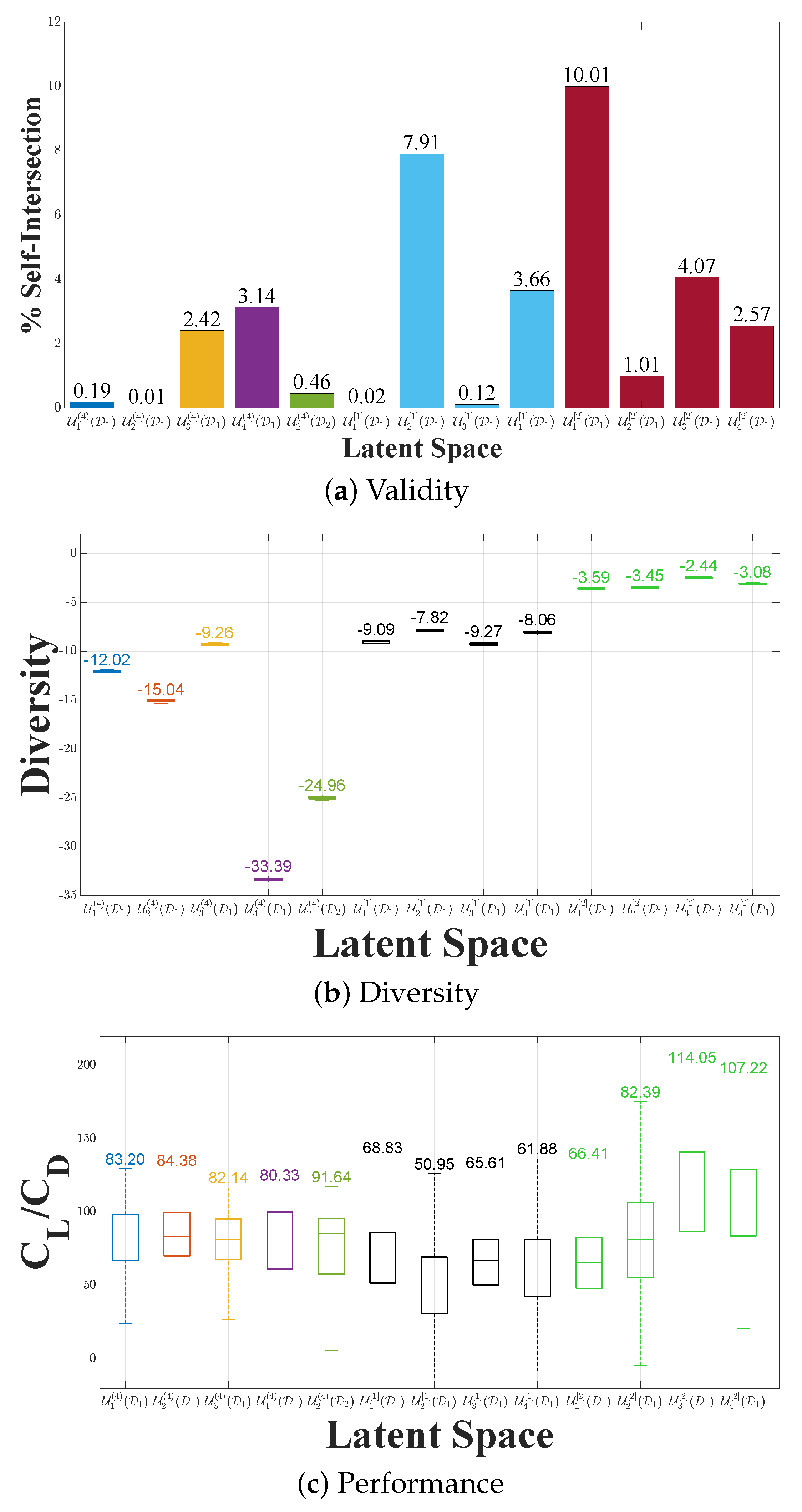
- Design Validity: Ensuring shape validity is a critical aspect for a robust latent design space. Space validity aims at eliminating, to the extent possible, invalid shapes, such as self-intersecting or undulating profiles, from the design space. Obviously, self-intersections can lead to ambiguous or erroneous interpretations, and high design validity is essential for maintaining fidelity and interpretability in the reduced-dimensional representation. Self-intersections can be easily checked with a line–line self-intersection algorithm applied to polygonal approximations of the profiles. To check undulations, unwanted inflection points in the curvature graph can be identified.
- Design Diversity: Diversity pertains to the richness/variability of the latent space designs. Assessing diversity in a latent space offers insights into the space’s capability to represent a broad spectrum of profiles, ultimately preventing the undesirable case where the space contracts into a small region with very similar designs. A diverse latent space signals the underlying model’s capacity to capture the inherent complexity and variability present in the data. The similarity kernel in Equation (8), computed for a large number of random designs in the latent space, can be used to this end.
- Design Performance: Finally, the functional performance of the designs residing in the latent space is obviously of utmost significance, especially when performance-based optimization is being considered. The lift-to-drag ratio for a given set of positive angles of attack was used in this work to capture the aerodynamic/hydrodynamic performance of each profile design. High values indicate the achievement of large lift forces without imposing a drag penalty, whereas lower values will generally indicate less preferable designs. For the evaluation of both coefficients, the XFOIL computational package was employed, which is a widely used and validated computational tool for airfoil analysis.
3. Results and Discussion
3.1. Latent Space Generation
3.2. Design Space Quality Comparisons
Effect of Discretization
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kostas, K.; Ginnis, A.; Politis, C.; Kaklis, P. Ship-hull shape optimization with a T-spline based BEM–isogeometric solver. Comput. Methods Appl. Mech. Eng. 2015, 284, 611–622. [Google Scholar] [CrossRef]
- Kostas, K.; Ginnis, A.; Politis, C.; Kaklis, P. Shape-optimization of 2D hydrofoils using an Isogeometric BEM solver. Comput.-Aided Des. 2017, 82, 79–87. [Google Scholar] [CrossRef]
- Khan, S.; Goucher-Lambert, K.; Kostas, K.; Kaklis, P. ShipHullGAN: A generic parametric modeller for ship hull design using deep convolutional generative model. Comput. Methods Appl. Mech. Eng. 2023, 411, 116051. [Google Scholar] [CrossRef]
- Usama, M.; Arif, A.; Haris, F.; Khan, S.; Afaq, S.K.; Rashid, S. A data-driven interactive system for aerodynamic and user-centred generative vehicle design. In Proceedings of the 2021 International Conference on Artificial Intelligence (ICAI), Islamabad, Pakistan, 5–7 April 2021; pp. 119–127. [Google Scholar]
- Khan, S.; Awan, M.J. A generative design technique for exploring shape variations. Adv. Eng. Inform. 2018, 38, 712–724. [Google Scholar] [CrossRef]
- Kulfan, B.M. Universal parametric geometry representation method. J. Aircr. 2008, 45, 142–158. [Google Scholar] [CrossRef]
- Oh, S.; Jung, Y.; Kim, S.; Lee, I.; Kang, N. Deep generative design: Integration of topology optimization and generative models. J. Mech. Des. 2019, 141, 111405. [Google Scholar] [CrossRef]
- Burnap, A.; Hauser, J.R.; Timoshenko, A. Design and Evaluation of Product Aesthetics: A Human-Machine Hybrid Approach; Elsevier: Amsterdam, The Netherlands, 2021. [Google Scholar]
- Shu, D.; Cunningham, J.; Stump, G.; Miller, S.W.; Yukish, M.A.; Simpson, T.W.; Tucker, C.S. 3d design using generative adversarial networks and physics-based validation. J. Mech. Des. 2020, 142, 071701. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. In Proceedings of the Advances in Neural Information Processing Systems 27 (NIPS 2014), Montreal, QC, Canada, 8–13 December 2014; Volume 27. [Google Scholar]
- Kingma, D.P.; Welling, M. Auto-encoding variational bayes. arXiv 2013, arXiv:1312.6114. [Google Scholar]
- Yang, Z.; Li, X.; Catherine Brinson, L.; Choudhary, A.N.; Chen, W.; Agrawal, A. Microstructural materials design via deep adversarial learning methodology. J. Mech. Des. 2018, 140, 111416. [Google Scholar] [CrossRef]
- Zhang, W.; Yang, Z.; Jiang, H.; Nigam, S.; Yamakawa, S.; Furuhata, T.; Shimada, K.; Kara, L.B. 3D shape synthesis for conceptual design and optimization using variational autoencoders. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Anaheim, CA, USA, 18–21 August 2019; Volume 59186, p. V02AT03A017. [Google Scholar]
- Chen, W.; Chiu, K.; Fuge, M.D. Airfoil design parameterization and optimization using bézier generative adversarial networks. AIAA J. 2020, 58, 4723–4735. [Google Scholar] [CrossRef]
- Regenwetter, L.; Nobari, A.H.; Ahmed, F. Deep generative models in engineering design: A review. J. Mech. Des. 2022, 144, 071704. [Google Scholar] [CrossRef]
- Chen, W.; Ahmed, F. MO-PaDGAN: Reparameterizing Engineering Designs for augmented multi-objective optimization. Appl. Soft Comput. 2021, 113, 107909. [Google Scholar] [CrossRef]
- Khan, S.; Kaklis, P.; Goucher-Lambert, K. How Does Agency Impact Human-AI Collaborative Design Space Exploration? A Case Study on Ship Design with Deep Generative Models. In Proceedings of the ASME 2023 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Boston, MA, USA, 20–23 August 2023; Volume 3B, p. V03BT03A055. [Google Scholar]
- Srivastava, A.; Valkov, L.; Russell, C.; Gutmann, M.U.; Sutton, C. Veegan: Reducing mode collapse in gans using implicit variational learning. In Proceedings of the Advances in Neural Information Processing Systems 30 (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017; Volume 30. [Google Scholar]
- Salimans, T.; Goodfellow, I.; Zaremba, W.; Cheung, V.; Radford, A.; Chen, X. Improved techniques for training gans. In Proceedings of the Advances in Neural Information Processing Systems 29 (NIPS 2016), Barcelona, Spain, 5–10 December 2016; Volume 29. [Google Scholar]
- Mirza, M.; Osindero, S. Conditional generative adversarial nets. arXiv 2014, arXiv:1411.1784. [Google Scholar]
- Chen, W.; Ahmed, F. Padgan: Learning to generate high-quality novel designs. J. Mech. Des. 2021, 143, 031703. [Google Scholar] [CrossRef]
- Borodin, A. Determinantal point processes. arXiv 2009, arXiv:0911.1153. [Google Scholar]
- Kulesza, A.; Taskar, B. Determinantal point processes for machine learning. Found. Trends Mach. Learn. 2012, 5, 123–286. [Google Scholar] [CrossRef]
- D’Agostino, D.; Serani, A.; Diez, M. Design-space assessment and dimensionality reduction: An off-line method for shape reparameterization in simulation-based optimization. Ocean Eng. 2020, 197, 106852. [Google Scholar] [CrossRef]
- Diez, M.; Campana, E.F.; Stern, F. Design-space dimensionality reduction in shape optimization by Karhunen–Loève expansion. Comput. Methods Appl. Mech. Eng. 2015, 283, 1525–1544. [Google Scholar] [CrossRef]
- Khan, S.; Kaklis, P.; Serani, A.; Diez, M.; Kostas, K. Shape-supervised dimension reduction: Extracting geometry and physics associated features with geometric moments. Comput.-Aided Des. 2022, 150, 103327. [Google Scholar] [CrossRef]
- Kou, J.; Botero-Bolívar, L.; Ballano, R.; Marino, O.; de Santana, L.; Valero, E.; Ferrer, E. Aeroacoustic airfoil shape optimization enhanced by autoencoders. Expert Syst. Appl. 2023, 217, 119513. [Google Scholar] [CrossRef]
- Zhou, Q.; Li, B.; Tao, P.; Xu, Z.; Zhou, C.; Wu, Y.; Hu, H. Residual-recursive autoencoder for accelerated evolution in savonius wind turbines optimization. Neurocomputing 2022, 500, 909–920. [Google Scholar] [CrossRef]
- Makhzani, A.; Shlens, J.; Jaitly, N.; Goodfellow, I.; Frey, B. Adversarial autoencoders. arXiv 2015, arXiv:1511.05644. [Google Scholar]
- Masood, Z.; Kostas, K.V.; Khan, S.; Kaklis, P.D. Shape-informed dimensional reduction in airfoil/hydrofoil modeling. J. Mar. Sci. Eng. 2023, 11, 1851. [Google Scholar] [CrossRef]
- Bronstein, A.M.; Bronstein, M.M.; Kimmel, R. Numerical Geometry of Non-Rigid Shapes; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Xu, D.; Li, H. Geometric moment invariants. Pattern Recognit. 2008, 41, 240–249. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. Commun. ACM 2020, 63, 139–144. [Google Scholar] [CrossRef]
- UIUC Applied Aerodynamics Group. UIUC Airfoil Coordinates Database. 2023. Available online: https://m-selig.ae.illinois.edu/ads/coord_database.html (accessed on 1 February 2023).
- Chen, W.; Chiu, K.; Fuge, M. Aerodynamic Design Optimization and Shape Exploration using Generative Adversarial Networks. In Proceedings of the AIAA SciTech Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
- Kostas, K.; Amiralin, A.; Sagimbayev, S.; Massalov, T.; Kalel, Y.; Politis, C. Parametric model for the reconstruction and representation of hydrofoils and airfoils. Ocean Eng. 2020, 199, 107020. [Google Scholar] [CrossRef]
- Kostas, K.V.; Manousaridou, M. Machine-Learning-Enabled Foil Design Assistant. J. Mar. Sci. Eng. 2023, 11, 1470. [Google Scholar] [CrossRef]
- Kulfan, B.; Bussoletti, J. Fundamental Parametric Geometry Representations for Aircraft Component Shapes. In Proceedings of the 11th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Portsmouth, VA, USA, 6–8 September 2006. [Google Scholar]
- Chen, W.; Fuge, M. BezierGAN: Automatic Generation of Smooth Curves from Interpretable Low-Dimensional Parameters. arXiv 2018, arXiv:1808.08871. [Google Scholar]
- Drela, M.; Giles, M. Viscous-inviscid analysis of transonic and low Reynolds number airfoils. AIAA J. 1987, 25, 1347–1355. [Google Scholar] [CrossRef]
- Drela, M. XFOIL: An Analysis and Design System for Low Reynolds Number Airfoils. In Low Reynolds Number Aerodynamics, Lecture Notes in Engineering; Mueller, T., Ed.; Springer: Berlin/Heidelberg, Germany, 1989; Volume 54. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SSV Description | SSV | Latent Space |
|---|---|---|
| Geometry only | ||
| Geometry and 2nd-order moments | ||
| Geometry and 3rd-order moments | ||
| Geometry and 4th-order moments | ||
| Geometry and 2nd- to 3rd-order moments | ||
| Geometry and 2nd- to 4th-order moments | ||
| Geometry and performance () |
| SSV Description | GAN Latent Space | PaDGAN Latent Space |
|---|---|---|
| Uniform parametric spacing | ||
| Cosine spacing | ||
| Curvature-based spacing | ||
| Uniform point spacing |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masood, Z.; Usama, M.; Khan, S.; Kostas, K.; Kaklis, P.D. Generative vs. Non-Generative Models in Engineering Shape Optimization. J. Mar. Sci. Eng. 2024, 12, 566. https://doi.org/10.3390/jmse12040566
Masood Z, Usama M, Khan S, Kostas K, Kaklis PD. Generative vs. Non-Generative Models in Engineering Shape Optimization. Journal of Marine Science and Engineering. 2024; 12(4):566. https://doi.org/10.3390/jmse12040566
Chicago/Turabian StyleMasood, Zahid, Muhammad Usama, Shahroz Khan, Konstantinos Kostas, and Panagiotis D. Kaklis. 2024. "Generative vs. Non-Generative Models in Engineering Shape Optimization" Journal of Marine Science and Engineering 12, no. 4: 566. https://doi.org/10.3390/jmse12040566
APA StyleMasood, Z., Usama, M., Khan, S., Kostas, K., & Kaklis, P. D. (2024). Generative vs. Non-Generative Models in Engineering Shape Optimization. Journal of Marine Science and Engineering, 12(4), 566. https://doi.org/10.3390/jmse12040566