

Robust Decision-Making for the Reactive Collision Avoidance of Autonomous Ships against Various Perception Sensor Noise Levels




Abstract
1. Introduction
1.1. Background
1.2. Literature Review
1.3. Aim & Contributions
- A novel approach that incorporates sensor noise for end-to-end decision-making pertaining to a deep reinforcement learning (DRL) agent is proposed, providing a way forwards towards a more effective integration of signal processing and decision-making techniques.
- An effective training framework for a DRL agent that enhances the robustness and sophistication of the agent’s decision-making against various sensor noise levels is proposed.
- A systematic way to analyse and interpret the decision-making of a trained DRL agent is presented.
- A systematic way to analyse the sensitivity of a trained DRL agent to inputs pertaining to sensor noise is presented.
1.4. Outline
2. Methodology
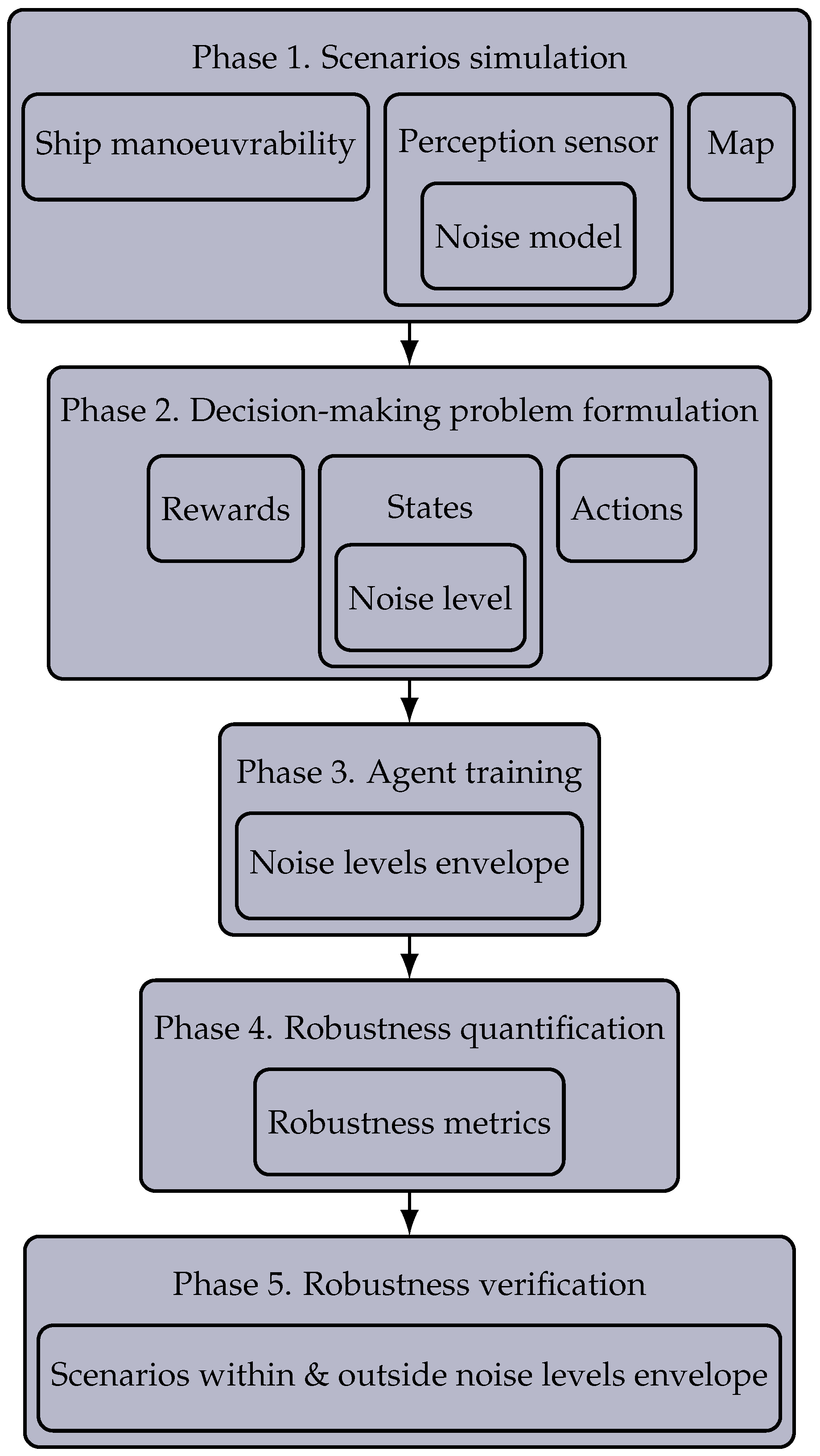
- Phase 1. Scenarios simulation: The objective is to simulate scenarios pertaining to the reactive collision avoidance of a MASS using a noisy perception sensor, by employing the main components as digital twins. The employed digital twins are the ship manoeuvrability, perception sensor and its noise model, and map.
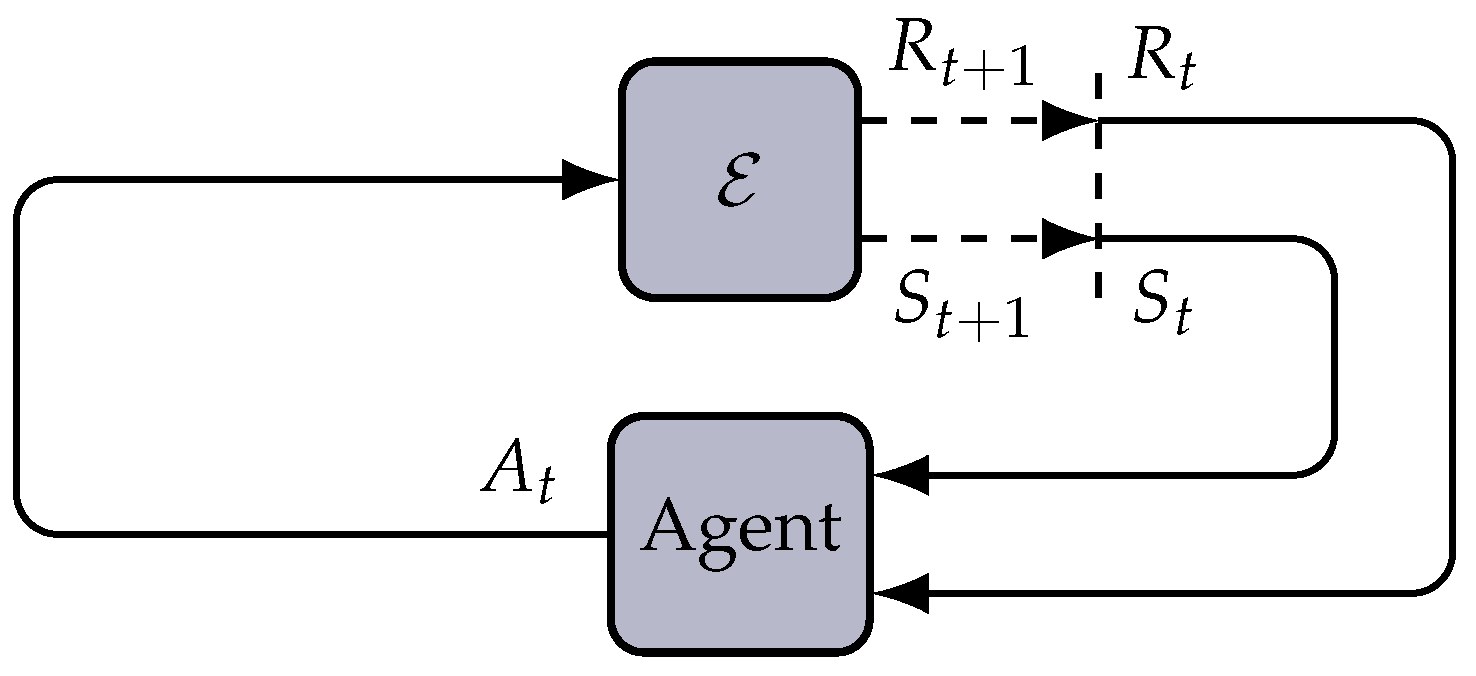
- Phase 2. Decision-making problem formulation: The objective is to formulate the decision-making problem pertaining to the investigated scenarios as a Markov decision process, by identifying the rewards, states, and actions. The identified rewards are associated with path following, nominal navigation, actuator control, and collision avoidance objectives. The identified states are associated with variables related to the rewards and noise level of the perception sensor. The identified actions are associated with the actuator control.
- Phase 3. Agent training: The objective is to train a DRL agent that can make decisions over the formulated problem, by developing a training framework. The developed training framework considers the noise levels envelope of the perception sensor investigated during the agent’s training.
- Phase 4. Robustness quantification: The objective is to quantify the robustness of the trained agent’s decision-making against various perception sensor noise levels, by defining robustness metrics. The defined robustness metrics are associated with path following and collision avoidance.
- Phase 5. Robustness verification: The objective is to verify the robustness of the trained agent’s decision-making against various perception sensor noise levels, by investigating various scenarios. The investigated scenarios are within and outside the trained noise levels envelope of the perception sensor.
2.1. Scenarios Simulation
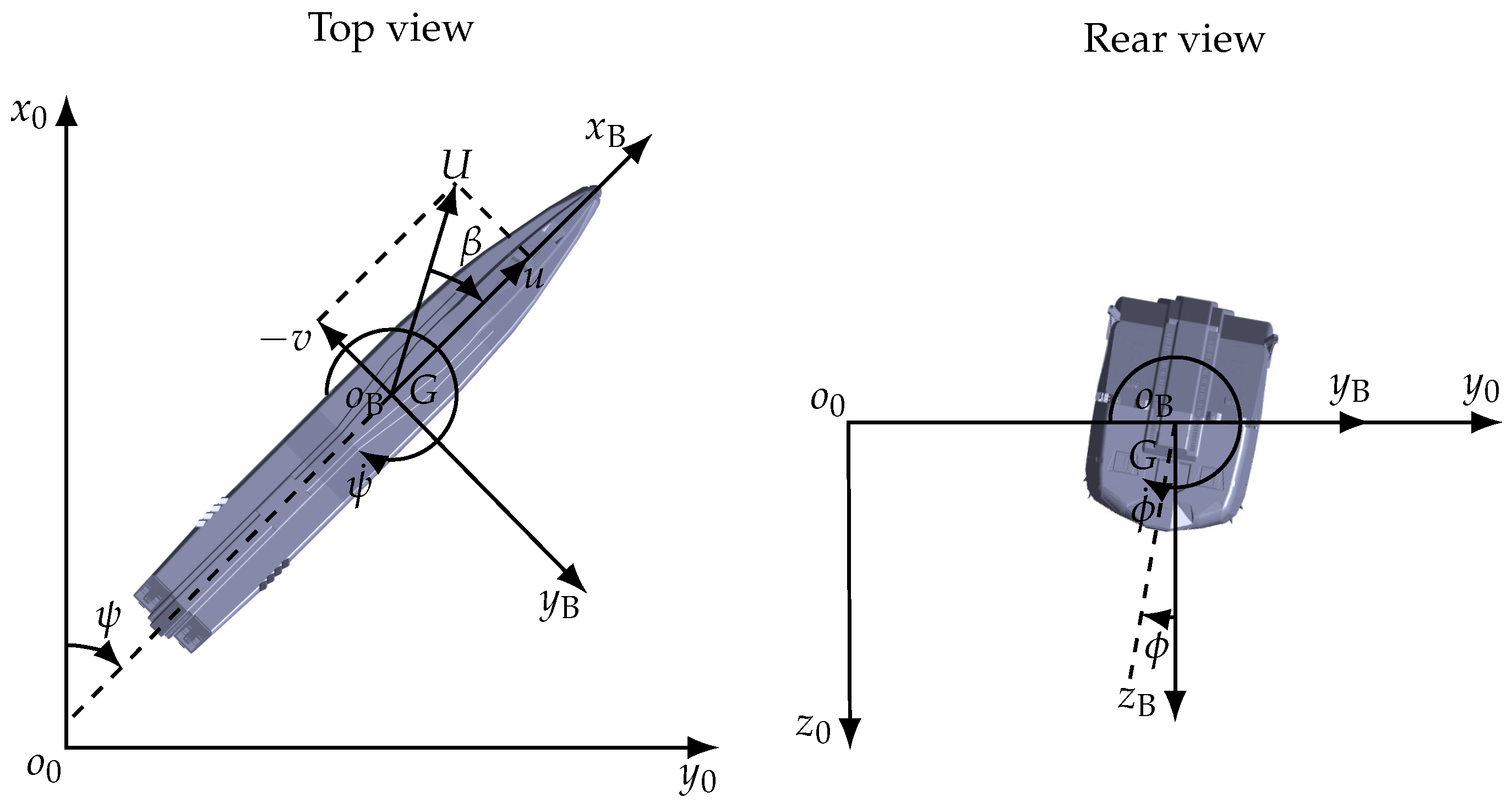
2.1.1. Ship Manoeuvrability
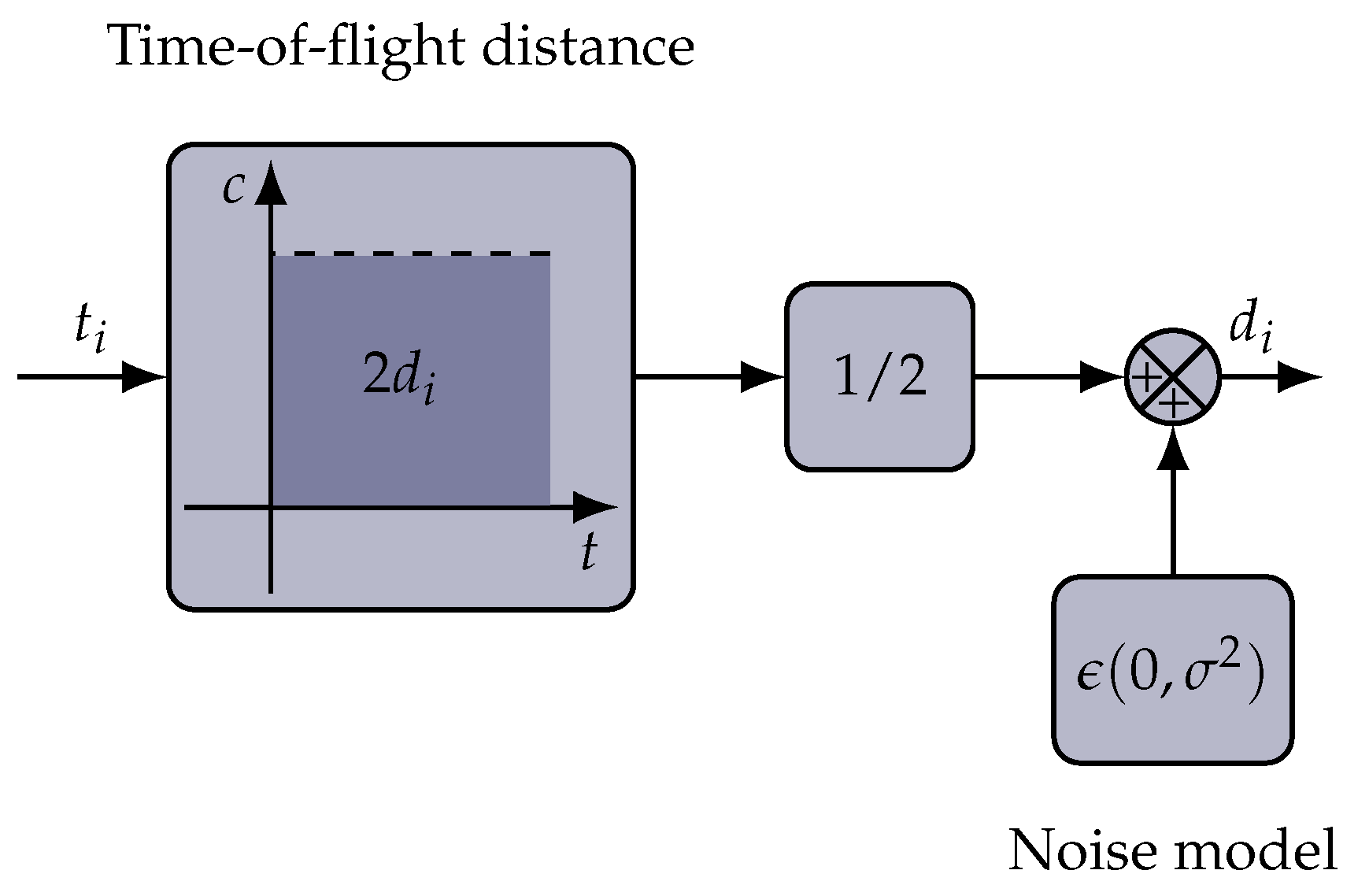
2.1.2. Perception Sensor
2.1.3. Map
2.2. Decision-Making Problem Formulation
2.2.1. Rewards
2.2.2. States & Actions
2.3. Agent Training
2.3.1. Deep Reinforcement Learning Agent
| Algorithm 1: Deep deterministic policy gradient |
 |
2.3.2. Training Framework
2.4. Robustness Quantification & Verification
3. Case Study
4. Results & Discussion
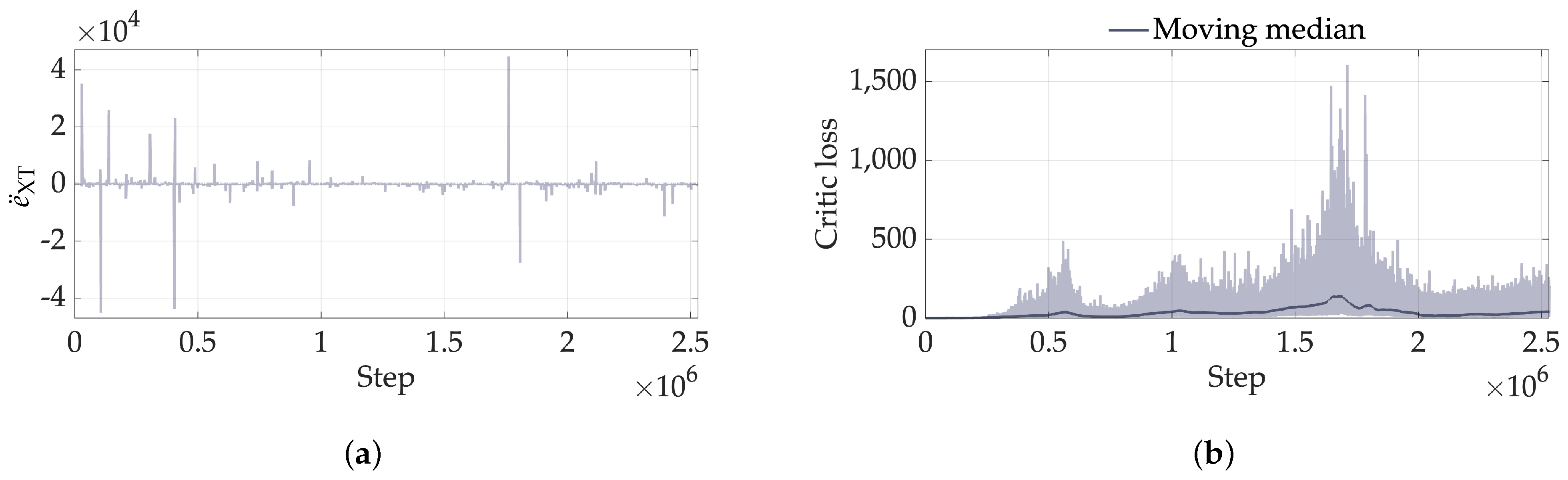
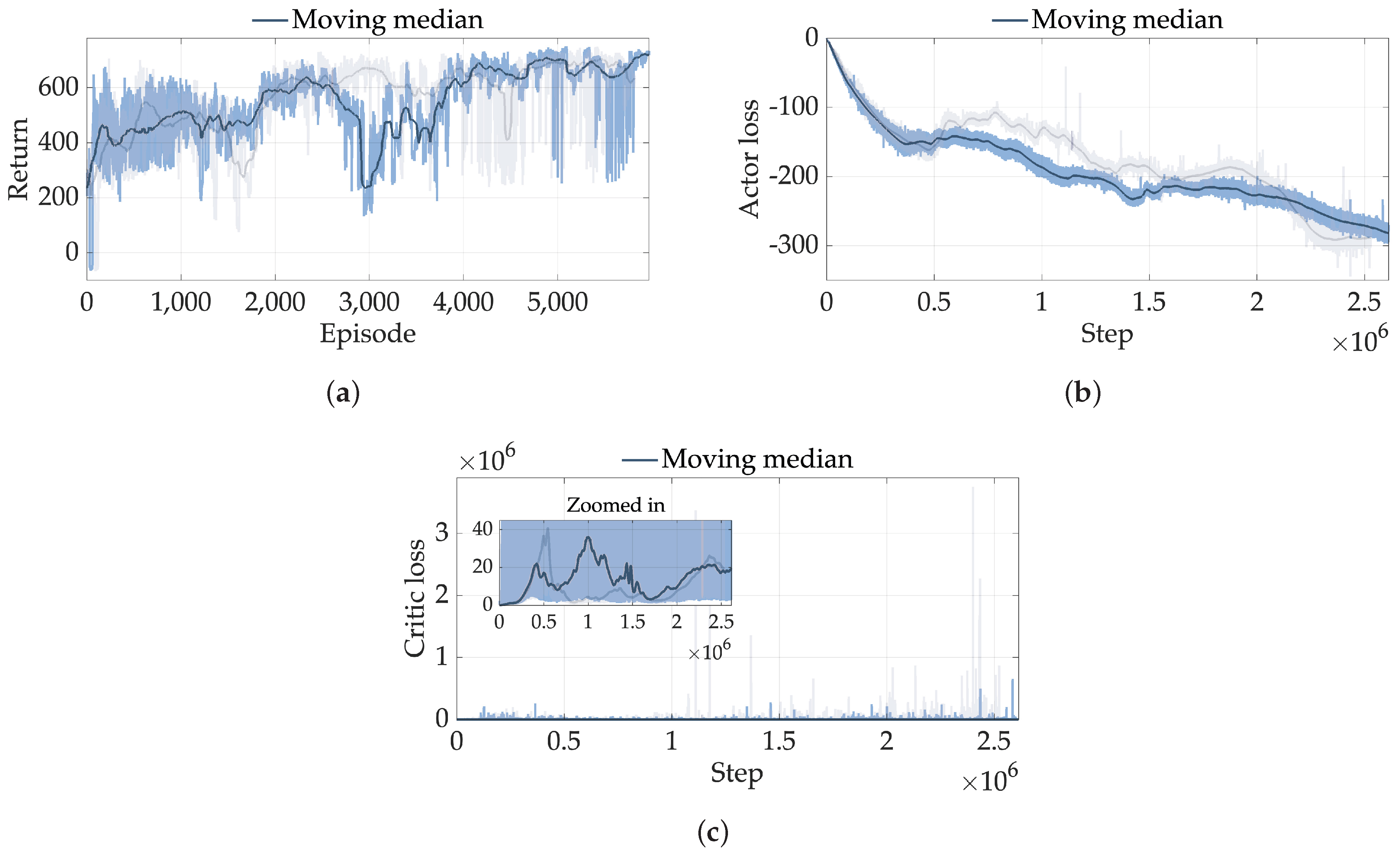
4.1. Agent Training
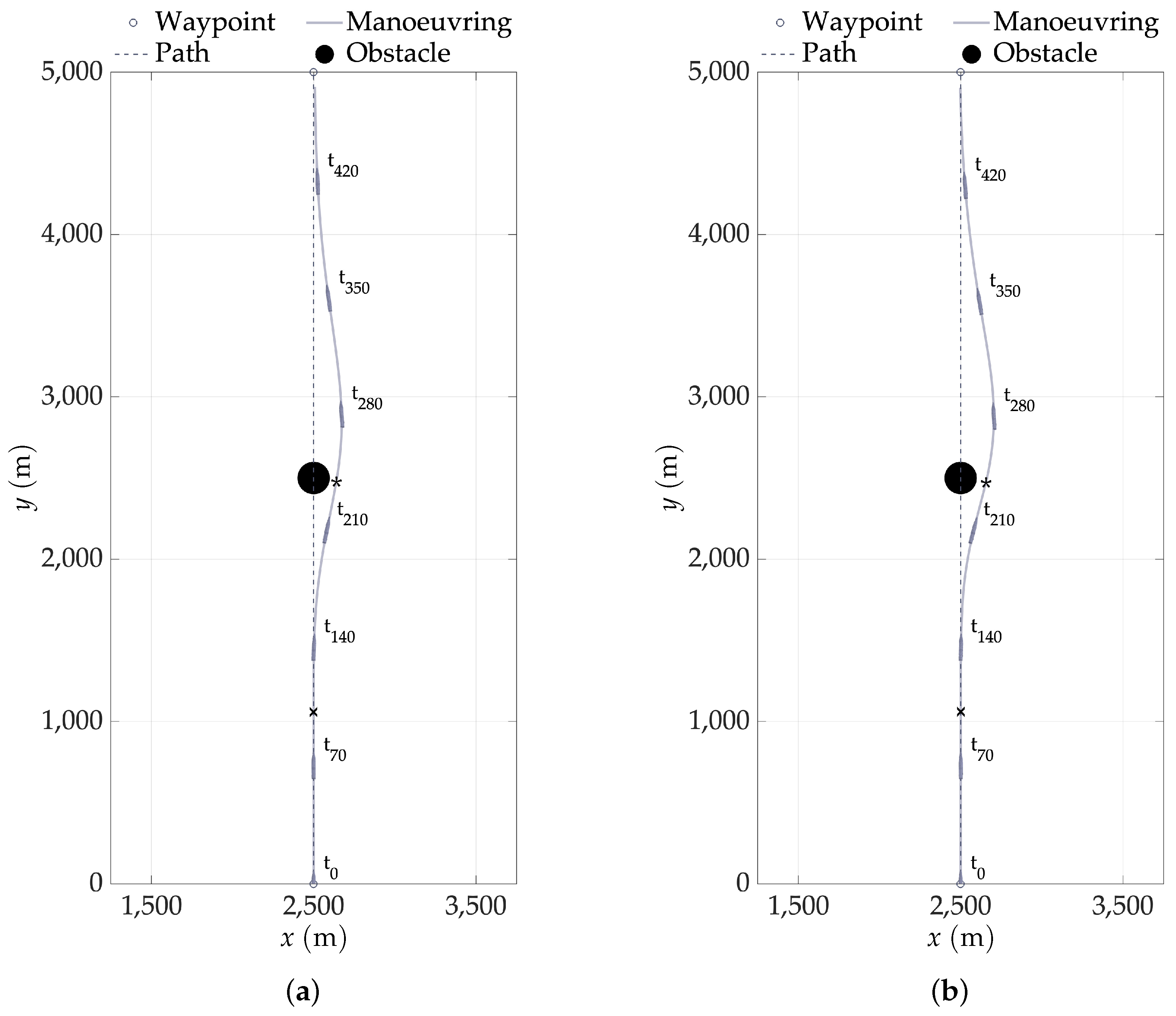
4.2. Simulation Results
4.3. Sensitivity Analysis
4.4. Robustness Verification
4.5. Effectiveness of the Proposed Methodology
5. Conclusions
- The trained agent exhibited enhanced sophisticated decision-making prioritising safety over efficiency when the noise variance was higher. Specifically, the decision-making of the agent over the rewards exploited less the path following, nominal navigation, and actuator control rewards over the collision avoidance reward, manifested as larger evasive manoeuvres.
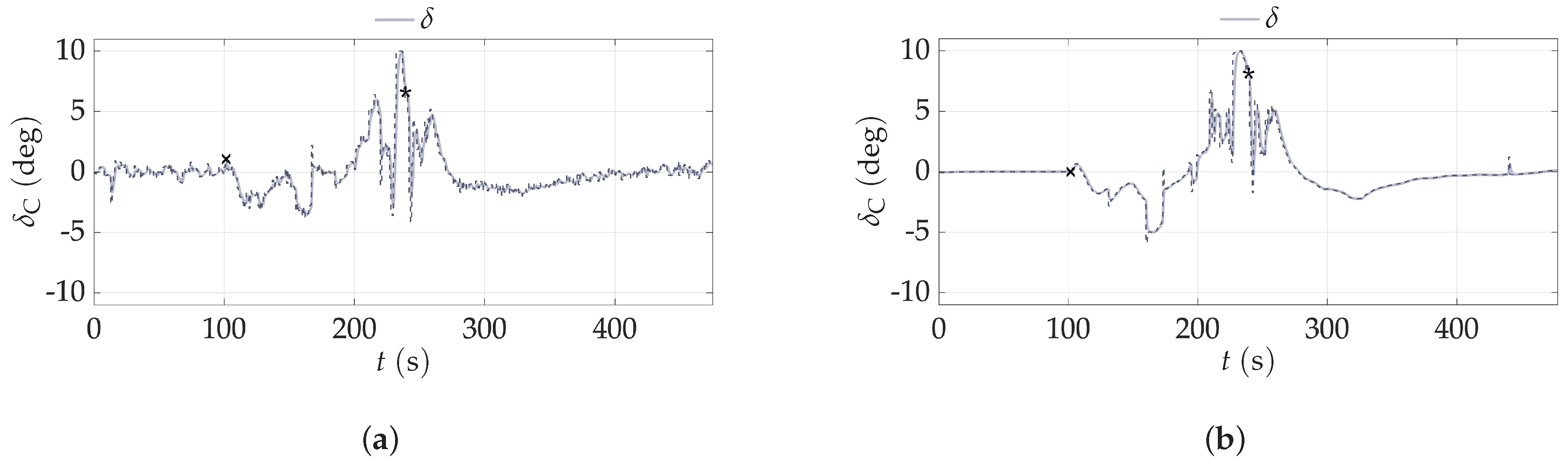
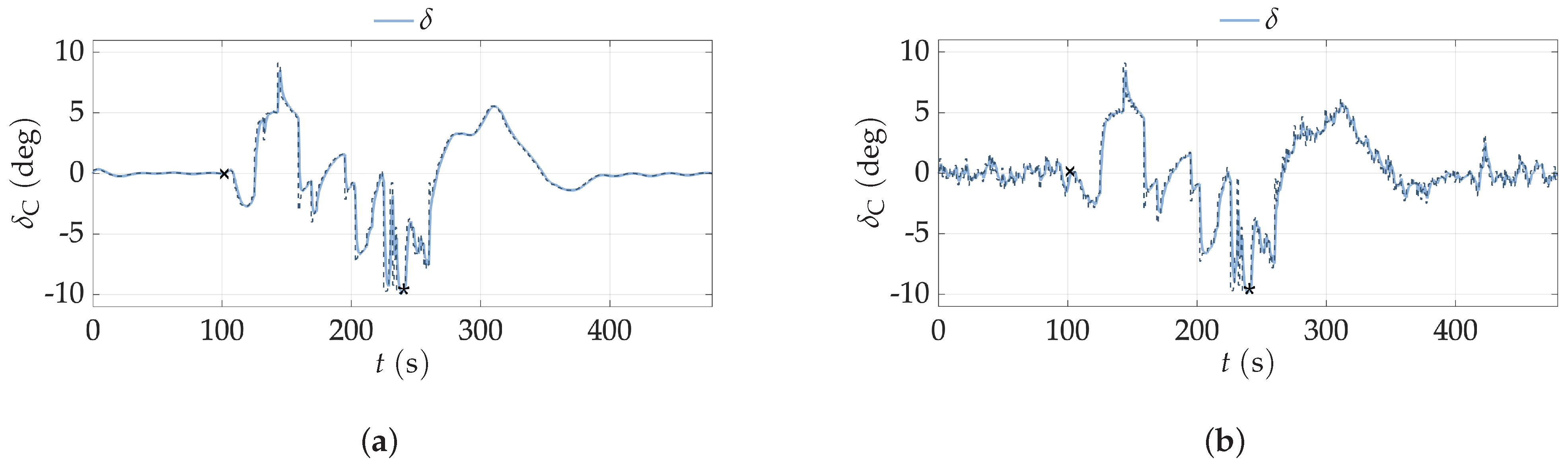
- The actor’s policy exhibited enhanced expressiveness by outputting different commanded rudder angles depending on the noise variance. Specifically, major difference in the commanded rudder angles was evident during the evasive manoeuvre verifying the agent’s sophisticated decision-making. Also, the actor initiated an evasive manoeuvre by successfully discerning genuine obstacle detections amidst noisy measurements, which was attributed to the great feature extraction capabilities of deep neural networks.
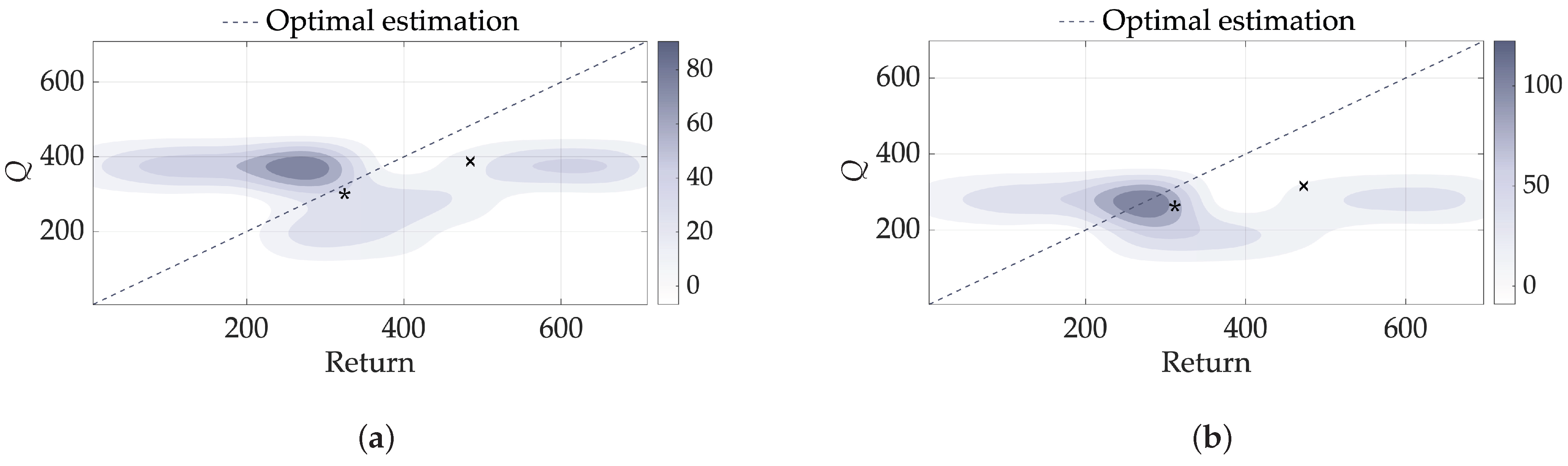
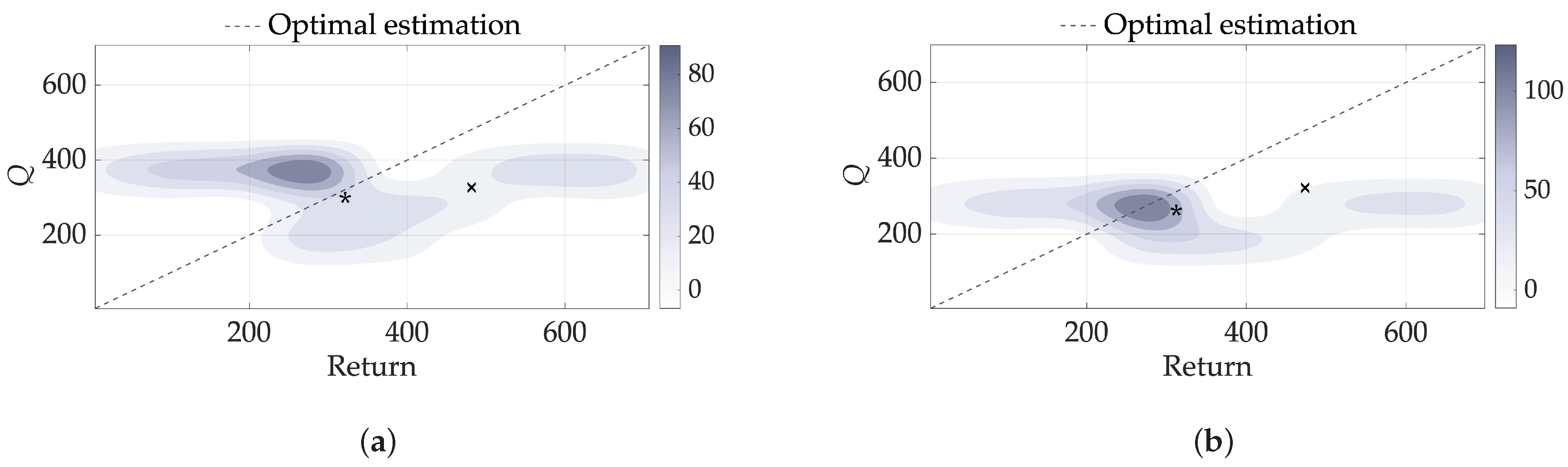
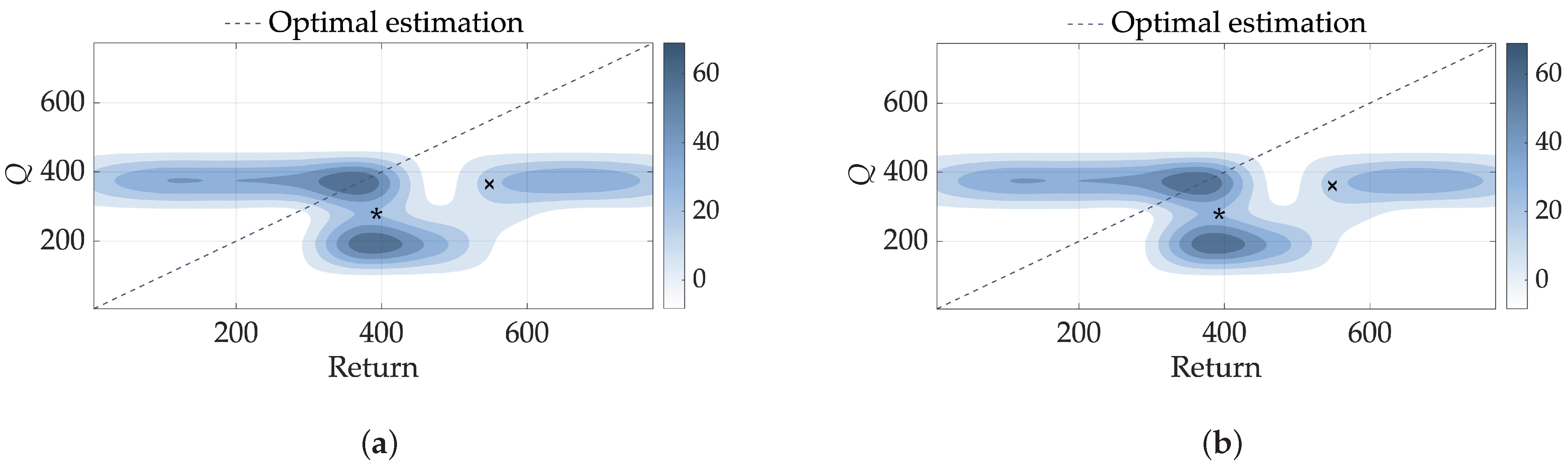
- The critic’s estimation exhibited enhanced adaptability by adjusting its optimism and conservatism depending on the noise variance. Specifically, the critic learned to underestimate the expected return when the noise variance was higher verifying the actor’s policy expressiveness. The critic’s conservatism was attributed to the higher probability of triggering the collision criterion in higher noise variances.
- Sensitivity analysis indicated the criticality of the noise variance observation for the agent’s decision-making. Specifically, major differences in the actor’s and critic’s outputs were noted during the variations of the noise variance observation and not during the variations of the LIDAR measurements observation. However, the LIDAR measurements observation was found to be responsible for the erratic output.
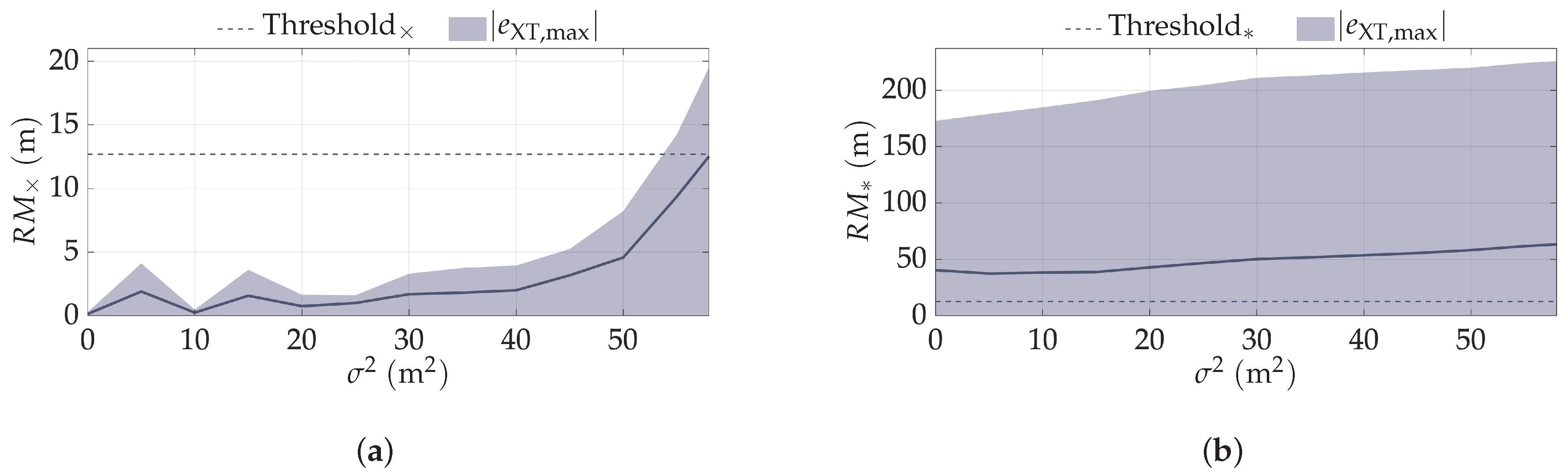
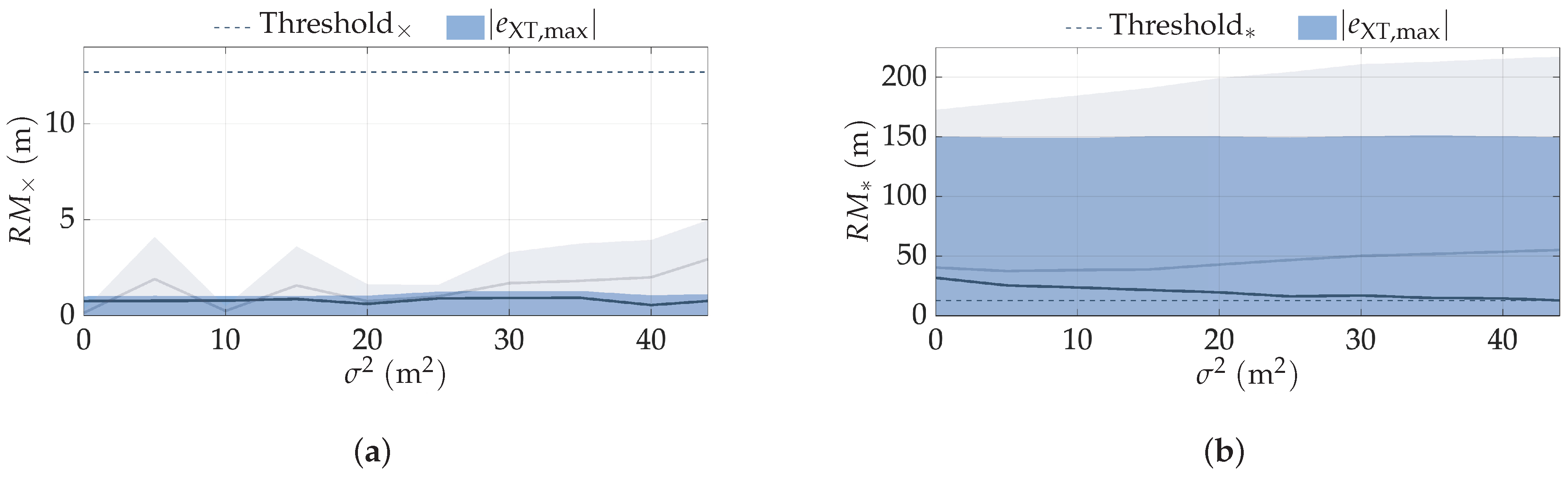
- The robustness of the agent’s decision-making against noise variance was verified up to 132% from its maximum trained value. Specifically, the robustness for path following decreased with the increase of noise variance, but the robustness for collision avoidance increased by 52.6% from its initial value considering minimum noise variance. The increase of robustness was attributed to the agent’s ability to generalise its sophisticated decision-making across higher noise variances.
- The robustness of the agent’s decision-making against noise variance was verified only up to 76% from its maximum trained value, when trained without the noise variance observation. Specifically, the robustness for collision avoidance exhibited a decreasing trend with the increase of noise variances. This was attributed to the far less sophisticated decision-making, lack of expressiveness of the actor’s policy and adaptability of the critic’s estimation, with worse generalisation capabilities, highlighting the effectiveness of the proposed methodology.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 2D, 3D | two or three dimensional |
| 3DOF, 4DOF | three or four degrees of freedom |
| AI | artificial intelligence |
| CFD | computational fluid dynamics |
| COLREGs | International Regulations for Preventing Collisions at Sea |
| DDPG | deep deterministic policy gradient |
| DNN | deep neural networks |
| DQN | deep Q network |
| DRL | deep reinforcement learning |
| DW | dynamic window |
| EKF | extended Kalman filter |
| LIDAR | light detection and ranging |
| MASS | maritime autonomous surface ship |
| MDP | Markov decision-process |
| OS | own ship |
| RADAR | radio detection and ranging |
| SMCR | specified maximum continuous rating |
| SOLAS | International Convention for the Safety of Life at Sea |
| TD3 | twin delayed deep deterministic policy gradient |
| XTL | cross-track limit |
References
- Sepehri, A.; Vandchali, H.R.; Siddiqui, A.W.; Montewka, J. The impact of shipping 4.0 on controlling shipping accidents: A systematic literature review. Ocean Eng. 2022, 243, 110162. [Google Scholar] [CrossRef]
- Benamara, H.; Hoffmann, J.; Youssef, F. Maritime transport: The sustainability imperative. In Sustainable Shipping: A Cross-Disciplinary View; Springer: Berlin/Heidelberg, Germany, 2019; pp. 1–31. [Google Scholar]
- Lv, H.; Lloret, J.; Song, H. Guest Editorial Introduction to the Special Issue on Internet of Things in Intelligent Transportation Infrastructure. IEEE Trans. Intell. Transp. Syst. 2023, 24, 12843–12851. [Google Scholar] [CrossRef]
- Guerrero-Ibanez, J.A.; Zeadally, S.; Contreras-Castillo, J. Integration challenges of intelligent transportation systems with connected vehicle, cloud computing, and internet of things technologies. IEEE Wirel. Commun. 2015, 22, 122–128. [Google Scholar] [CrossRef]
- Zhu, L.; Yu, F.R.; Wang, Y.; Ning, B.; Tang, T. Big data analytics in intelligent transportation systems: A survey. IEEE Trans. Intell. Transp. Syst. 2018, 20, 383–398. [Google Scholar] [CrossRef]
- Jabbar, R.; Dhib, E.; Said, A.B.; Krichen, M.; Fetais, N.; Zaidan, E.; Barkaoui, K. Blockchain technology for intelligent transportation systems: A systematic literature review. IEEE Access 2022, 10, 20995–21031. [Google Scholar] [CrossRef]
- Xiong, G.; Zhu, F.; Liu, X.; Dong, X.; Huang, W.; Chen, S.; Zhao, K. Cyber-physical-social system in intelligent transportation. IEEE/CAA J. Autom. Sin. 2015, 2, 320–333. [Google Scholar] [CrossRef]
- Wang, Z.; Gupta, R.; Han, K.; Wang, H.; Ganlath, A.; Ammar, N.; Tiwari, P. Mobility digital twin: Concept, architecture, case study, and future challenges. IEEE Internet Things J. 2022, 9, 17452–17467. [Google Scholar] [CrossRef]
- Böckin, D.; Tillman, A.M. Environmental assessment of additive manufacturing in the automotive industry. J. Clean. Prod. 2019, 226, 977–987. [Google Scholar] [CrossRef]
- Wicaksana, I.P.R.E.; Christian, J.; Achmad, S.; Sutoyo, R. Effect of Visual Augmented Reality in the Transportation Sector. In Proceedings of the 2022 International Conference on Informatics Electrical and Electronics (ICIEE), Yogyakarta, Indonesia, 5–7 October 2022; pp. 1–5. [Google Scholar]
- Abduljabbar, R.; Dia, H.; Liyanage, S.; Bagloee, S.A. Applications of artificial intelligence in transport: An overview. Sustainability 2019, 11, 189. [Google Scholar] [CrossRef]
- IMO. IMO Takes First Steps to Address Autonomous Ships. 2018. Available online: https://www.imo.org/en/MediaCentre/PressBriefings/Pages/08-MSC-99-MASS-scoping.aspx#:~:text=For%20the%20purpose%20of%20the,operate%20independently%20of%20human%20interaction.&text=Remotely%20controlled%20ship%20without%20seafarers,and%20operated%20from%20another%20location (accessed on 7 November 2023).
- Aiello, G.; Giallanza, A.; Mascarella, G. Towards Shipping 4.0. A preliminary gap analysis. Procedia Manuf. 2020, 42, 24–29. [Google Scholar] [CrossRef]
- Van Brummelen, J.; O’Brien, M.; Gruyer, D.; Najjaran, H. Autonomous vehicle perception: The technology of today and tomorrow. Transp. Res. Part Emerg. Technol. 2018, 89, 384–406. [Google Scholar] [CrossRef]
- Shahian Jahromi, B.; Tulabandhula, T.; Cetin, S. Real-time hybrid multi-sensor fusion framework for perception in autonomous vehicles. Sensors 2019, 19, 4357. [Google Scholar] [CrossRef] [PubMed]
- Campbell, S.; O’Mahony, N.; Krpalcova, L.; Riordan, D.; Walsh, J.; Murphy, A.; Ryan, C. Sensor technology in autonomous vehicles: A review. In Proceedings of the 2018 29th Irish Signals and Systems Conference (ISSC), Belfast, UK, 21–22 June 2018; pp. 1–4. [Google Scholar]
- Schuster, M.; Blaich, M.; Reuter, J. Collision avoidance for vessels using a low-cost radar sensor. IFAC Proc. Vol. 2014, 47, 9673–9678. [Google Scholar] [CrossRef]
- Namgung, H. Local route planning for collision avoidance of maritime autonomous surface ships in compliance with COLREGs rules. Sustainability 2021, 14, 198. [Google Scholar] [CrossRef]
- Song, A.L.; Su, B.Y.; Dong, C.Z.; Shen, D.W.; Xiang, E.Z.; Mao, F.P. A two-level dynamic obstacle avoidance algorithm for unmanned surface vehicles. Ocean Eng. 2018, 170, 351–360. [Google Scholar] [CrossRef]
- Lee, P.; Theotokatos, G.; Boulougouris, E.; Bolbot, V. Risk-informed collision avoidance system design for maritime autonomous surface ships. Ocean Eng. 2023, 279, 113750. [Google Scholar] [CrossRef]
- Li, B.; Chan, P.H.; Baris, G.; Higgins, M.D.; Donzella, V. Analysis of automotive camera sensor noise factors and impact on object detection. IEEE Sens. J. 2022, 22, 22210–22219. [Google Scholar] [CrossRef]
- Li, B.; Chan, P.H.; Higgins, M.; Donzella, V.; Baris, G. Analysis of Automotive Camera Sensor Noise Factors. Authorea Prepr. 2023, 22, 22210–22219. [Google Scholar]
- Clunie, T.; DeFilippo, M.; Sacarny, M.; Robinette, P. Development of a perception system for an autonomous surface vehicle using monocular camera, lidar, and marine radar. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 14112–14119. [Google Scholar]
- Saxena, S.; Isukapati, I.K.; Smith, S.F.; Dolan, J.M. Multiagent sensor fusion for connected & autonomous vehicles to enhance navigation safety. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 2490–2495. [Google Scholar]
- Chan, P.H.; Dhadyalla, G.; Donzella, V. A framework to analyze noise factors of automotive perception sensors. IEEE Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Xu, H.; Hinostroza, M.A.; Guedes Soares, C. Modified Vector Field Path-Following Control System for an underactuated Autonomous surface ship model in the presence of static obstacles. J. Mar. Sci. Eng. 2021, 9, 652. [Google Scholar] [CrossRef]
- Blindheim, S.; Gros, S.; Johansen, T.A. Risk-based model predictive control for autonomous ship emergency management. IFAC PapersOnLine 2020, 53, 14524–14531. [Google Scholar] [CrossRef]
- Gao, D.; Zhou, P.; Shi, W.; Wang, T.; Wang, Y. A dynamic obstacle avoidance method for unmanned surface vehicle under the international regulations for preventing collisions at sea. J. Mar. Sci. Eng. 2022, 10, 901. [Google Scholar] [CrossRef]
- Serigstad, E.; Eriksen, B.O.H.; Breivik, M. Hybrid collision avoidance for autonomous surface vehicles. IFAC PapersOnLine 2018, 51, 1–7. [Google Scholar] [CrossRef]
- Wang, W.; Huang, L.; Liu, K.; Wu, X.; Wang, J. A COLREGs-Compliant Collision Avoidance Decision Approach Based on Deep Reinforcement Learning. J. Mar. Sci. Eng. 2022, 10, 944. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhang, W. Concise deep reinforcement learning obstacle avoidance for underactuated unmanned marine vessels. Neurocomputing 2018, 272, 63–73. [Google Scholar] [CrossRef]
- Zhou, C.; Wang, Y.; Wang, L.; He, H. Obstacle avoidance strategy for an autonomous surface vessel based on modified deep deterministic policy gradient. Ocean Eng. 2022, 243, 110166. [Google Scholar] [CrossRef]
- Meyer, E.; Robinson, H.; Rasheed, A.; San, O. Taming an autonomous surface vehicle for path following and collision avoidance using deep reinforcement learning. IEEE Access 2020, 8, 41466–41481. [Google Scholar] [CrossRef]
- Heiberg, A.; Larsen, T.N.; Meyer, E.; Rasheed, A.; San, O.; Varagnolo, D. Risk-based implementation of COLREGs for autonomous surface vehicles using deep reinforcement learning. Neural Netw. 2022, 152, 17–33. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.S.; Lee, D.H.; Kim, D.W.; Park, H.; Paik, K.J.; Kim, S. A numerical and experimental study on the obstacle collision avoidance system using a 2D LiDAR sensor for an autonomous surface vehicle. Ocean Eng. 2022, 257, 111508. [Google Scholar] [CrossRef]
- Gonzalez-Garcia, A.; Collado-Gonzalez, I.; Cuan-Urquizo, R.; Sotelo, C.; Sotelo, D.; Castañeda, H. Path-following and LiDAR-based obstacle avoidance via NMPC for an autonomous surface vehicle. Ocean Eng. 2022, 266, 112900. [Google Scholar] [CrossRef]
- Villa, J.; Aaltonen, J.; Koskinen, K.T. Path-following with lidar-based obstacle avoidance of an unmanned surface vehicle in harbor conditions. IEEE/ASME Trans. Mechatron. 2020, 25, 1812–1820. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, X.; Liang, X.; Li, B. A COLREGs-based obstacle avoidance approach for unmanned surface vehicles. Ocean Eng. 2018, 169, 110–124. [Google Scholar] [CrossRef]
- Peng, Y.; Yang, Y.; Cui, J.; Li, X.; Pu, H.; Gu, J.; Xie, S.; Luo, J. Development of the USV ‘JingHai-I’and sea trials in the Southern Yellow Sea. Ocean Eng. 2017, 131, 186–196. [Google Scholar] [CrossRef]
- Han, J.; Cho, Y.; Kim, J.; Kim, J.; Son, N.s.; Kim, S.Y. Autonomous collision detection and avoidance for ARAGON USV: Development and field tests. J. Field Robot. 2020, 37, 987–1002. [Google Scholar] [CrossRef]
- Han, J.; Kim, S.Y.; Kim, J. Enhanced target ship tracking with geometric parameter estimation for unmanned surface vehicles. IEEE Access 2021, 9, 39864–39872. [Google Scholar] [CrossRef]
- Kim, J.; Lee, C.; Chung, D.; Cho, Y.; Kim, J.; Jang, W.; Park, S. Field experiment of autonomous ship navigation in canal and surrounding nearshore environments. J. Field Robot. 2023, 41, 470–489. [Google Scholar] [CrossRef]
- Nielsen, R.E.; Papageorgiou, D.; Nalpantidis, L.; Jensen, B.T.; Blanke, M. Machine learning enhancement of manoeuvring prediction for ship Digital Twin using full-scale recordings. Ocean Eng. 2022, 257, 111579. [Google Scholar] [CrossRef]
- Glaessgen, E.; Stargel, D. The digital twin paradigm for future NASA and US Air Force vehicles. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, HI, USA, 23–26 April 2012; p. 1818. [Google Scholar]
- Zai, A.; Brown, B. Deep Reinforcement Learning in Action; Manning Publications: Shelter Island, NY, USA, 2020. [Google Scholar]
- MathWorks. Navigation Toolbox. Design, Simulate, and Deploy Algorithms for Autonomous Navigation. Available online: https://www.mathworks.com/products/navigation.html (accessed on 1 January 2024).
- MathWorks. Lidar Toolbox. Design, Analyze, and Test Lidar Processing Systems. Available online: https://www.mathworks.com/products/lidar.html (accessed on 1 January 2024).
- MathWorks. Robotics System Toolbox. Design, Simulate, Test, and Deploy Robotics Applications. Available online: https://www.mathworks.com/products/robotics.html (accessed on 1 January 2024).
- Zhang, C.; Liu, X.; Wan, D.; Wang, J. Experimental and numerical investigations of advancing speed effects on hydrodynamic derivatives in MMG model, part I: Xvv, Yv, Nv. Ocean Eng. 2019, 179, 67–75. [Google Scholar] [CrossRef]
- Kim, D.; Song, S.; Jeong, B.; Tezdogan, T. Numerical evaluation of a ship’s manoeuvrability and course keeping control under various wave conditions using CFD. Ocean Eng. 2021, 237, 109615. [Google Scholar] [CrossRef]
- Song, S.; Kim, D.; Dai, S. CFD investigation into the effect of GM variations on ship manoeuvring characteristics. Ocean Eng. 2024, 291, 116472. [Google Scholar] [CrossRef]
- He, S.; Kellett, P.; Yuan, Z.; Incecik, A.; Turan, O.; Boulougouris, E. Manoeuvring prediction based on CFD generated derivatives. J. Hydrodyn. 2016, 28, 284–292. [Google Scholar] [CrossRef]
- Jin, Y.; Yiew, L.J.; Zheng, Y.; Magee, A.R.; Duffy, J.; Chai, S. Dynamic manoeuvres of KCS with CFD free-running computation and system-based modelling. Ocean Eng. 2021, 241, 110043. [Google Scholar] [CrossRef]
- Suzuki, R.; Ueno, M.; Tsukada, Y. Numerical simulation of 6-degrees-of-freedom motions for a manoeuvring ship in regular waves. Appl. Ocean Res. 2021, 113, 102732. [Google Scholar] [CrossRef]
- Wang, J.; Zou, L.; Wan, D. CFD simulations of free running ship under course keeping control. Ocean Eng. 2017, 141, 450–464. [Google Scholar] [CrossRef]
- Abkowitz, M.A. Lectures on Ship Hydrodynamics–Steering and Manoeuvrability; Technical Report; Stevens Institute of Technology: Hoboken, NJ, USA, 1964. [Google Scholar]
- Ogawa, A.; Koyama, T.; Kijima, K. MMG report-I, on the mathematical model of ship manoeuvring. Bull. Soc. Naval Archit. Jpn. 1977, 575, 22–28. [Google Scholar]
- Budak, G.; Beji, S. Controlled course-keeping simulations of a ship under external disturbances. Ocean Eng. 2020, 218, 108126. [Google Scholar] [CrossRef]
- Sui, C.; De Vos, P.; Hopman, H.; Visser, K.; Stapersma, D.; Ding, Y. Effects of adverse sea conditions on propulsion and manoeuvring performance of low-powered ocean-going cargo ship. Ocean Eng. 2022, 254, 111348. [Google Scholar] [CrossRef]
- Yasukawa, H.; Sakuno, R. Application of the MMG method for the prediction of steady sailing condition and course stability of a ship under external disturbances. J. Mar. Sci. Technol. 2020, 25, 196–220. [Google Scholar] [CrossRef]
- Guo, H.; Zou, Z. System-based investigation on 4-DOF ship maneuvering with hydrodynamic derivatives determined by RANS simulation of captive model tests. Appl. Ocean Res. 2017, 68, 11–25. [Google Scholar] [CrossRef]
- Wu, T.; Li, R.; Chen, Q.; Pi, G.; Wan, S.; Liu, Q. A Numerical Study on Modeling Ship Maneuvering Performance Using Twin Azimuth Thrusters. J. Mar. Sci. Eng. 2023, 11, 2167. [Google Scholar] [CrossRef]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. 2015, 20, 37–52. [Google Scholar] [CrossRef]
- Son, K.H.; Nomoto, K. On the coupled motion of steering and rolling of a high-speed container ship. Nav. Archit. Ocean Eng. 1982, 20, 73–83. [Google Scholar] [CrossRef] [PubMed]
- Szlapczynski, R.; Krata, P.; Szlapczynska, J. A ship domain-based method of determining action distances for evasive manoeuvres in stand-on situations. J. Adv. Transp. 2018, 2018, 3984962. [Google Scholar] [CrossRef]
- Vivacqua, R.; Vassallo, R.; Martins, F. A low cost sensors approach for accurate vehicle localization and autonomous driving application. Sensors 2017, 17, 2359. [Google Scholar] [CrossRef]
- Hernandez-Aceituno, J.; Arnay, R.; Toledo, J.; Acosta, L. Using kinect on an autonomous vehicle for outdoors obstacle detection. IEEE Sens. J. 2016, 16, 3603–3610. [Google Scholar] [CrossRef]
- Rosique, F.; Navarro, P.J.; Fernández, C.; Padilla, A. A systematic review of perception system and simulators for autonomous vehicles research. Sensors 2019, 19, 648. [Google Scholar] [CrossRef] [PubMed]
- Thombre, S.; Zhao, Z.; Ramm-Schmidt, H.; García, J.M.V.; Malkamäki, T.; Nikolskiy, S.; Hammarberg, T.; Nuortie, H.; Bhuiyan, M.Z.H.; Särkkä, S.; et al. Sensors and AI techniques for situational awareness in autonomous ships: A review. IEEE Trans. Intell. Transp. Syst. 2020, 23, 64–83. [Google Scholar] [CrossRef]
- Robinette, P.; Sacarny, M.; DeFilippo, M.; Novitzky, M.; Benjamin, M.R. Sensor evaluation for autonomous surface vehicles in inland waterwaysp. Oceans 2019-Marseille 2019, 254, 1–8. [Google Scholar]
- Kim, K.; Kim, J.; Kim, J. Robust data association for multi-object detection in maritime environments using camera and radar measurements. IEEE Robot. Autom. Lett. 2021, 6, 5865–5872. [Google Scholar] [CrossRef]
- Peeters, G.; Kotzé, M.; Afzal, M.R.; Catoor, T.; Van Baelen, S.; Geenen, P.; Vanierschot, M.; Boonen, R.; Slaets, P. An unmanned inland cargo vessel: Design, build, and experiments. Ocean Eng. 2020, 201, 107056. [Google Scholar] [CrossRef]
- Zhang, C.; Huang, Z.; Ang, M.H.; Rus, D. 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Ocean Eng. 2021, 201, 3458–3464. [Google Scholar]
- Fang, H.; Huang, D. Noise reduction in lidar signal based on discrete wavelet transform. Opt. Commun. 2004, 233, 67–76. [Google Scholar] [CrossRef]
- Gimmestad, G.G.; Roberts, D.W. Lidar Engineering: Introduction to Basic Principles; Cambridge University Press: Cambridge, UK, 2023; Volume 233, pp. 67–76. [Google Scholar]
- Incoronato, A.; Locatelli, M.; Zappa, F. Statistical modelling of SPADs for time-of-flight LiDAR. Sensors 2021, 21, 4481. [Google Scholar] [CrossRef] [PubMed]
- Yasuda, Y.D.V.; Martins, L.E.G.; Cappabianco, F.A.M. Autonomous visual navigation for mobile robots: A systematic literature review. ACM Comput. Surv. (CSUR) 2020, 53, 1–34. [Google Scholar] [CrossRef]
- Guivant, J.; Nebot, E.; Nieto, J.; Masson, F. Navigation and mapping in large unstructured environments. Int. J. Robot. Res. 2004, 23, 449–472. [Google Scholar] [CrossRef]
- Ebrahimi, S.B.; Razzaghpour, M.; Valiente, R.; Raftari, A.; Fallah, Y.P. High-definition map representation techniques for automated vehicles. Electronics 2022, 11, 3374. [Google Scholar] [CrossRef]
- Filliat, D.; Meyer, J.A. Map-based navigation in mobile robots: I a review of localization strategies. Cogn. Syst. Res. 2003, 4, 243–282. [Google Scholar] [CrossRef]
- Chen, E.; Guo, J. Real time map generation using sidescan sonar scanlines for unmanned underwater vehicles. Ocean Eng. 2014, 91, 252–262. [Google Scholar] [CrossRef]
- Han, S.; Wang, L.; Wang, Y.; He, H. An efficient motion planning based on grid map: Predicted Trajectory Approach with global path guiding. Ocean Eng. 2021, 238, 109696. [Google Scholar] [CrossRef]
- Graesser, L.; Keng, W.L. Foundations of Deep Reinforcement Learning; Addison-Wesley Professional, Pearson Education: Boston, MA, USA, 2019. [Google Scholar]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Morales, M. Grokking Deep Reinforcement Learning; Manning Publications: Shelter Island, NY, USA, 2020. [Google Scholar]
- Fossen, T.I.; Breivik, M.; Skjetne, R. Line-of-sight path following of underactuated marine craft. IFAC Proc. Vol. 2003, 36, 211–216. [Google Scholar] [CrossRef]
- Kristić, M.; Žuškin, S.; Brčić, D.; Valčić, S. Zone of confidence impact on cross track limit determination in ECDIS passage planning. J. Mar. Sci. Eng. 2020, 8, 566. [Google Scholar] [CrossRef]
- Wang, X.; Wang, S.; Liang, X.; Zhao, D.; Huang, J.; Xu, X.; Dai, B.; Miao, Q. Deep reinforcement learning: A survey. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–15. [Google Scholar]
- Mousavi, S.S.; Schukat, M.; Howley, E. Deep reinforcement learning: An overview. In Proceedings of SAI Intelligent Systems Conference (IntelliSys) 2016: Volume 2; Springer: Berlin/Heidelberg, Germany, 2018; pp. 426–440. [Google Scholar]
- Woo, J.; Kim, N. Collision avoidance for an unmanned surface vehicle using deep reinforcement learning. Ocean Eng. 2020, 199, 107001. [Google Scholar] [CrossRef]
- Jaritz, M.; De Charette, R.; Toromanoff, M.; Perot, E.; Nashashibi, F. End-to-end race driving with deep reinforcement learning. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 2070–2075. [Google Scholar]
- Kilinc, O.; Montana, G. Multi-agent deep reinforcement learning with extremely noisy observations. arXiv 2018, arXiv:1812.00922. [Google Scholar]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Rusu, A.A.; Veness, J.; Bellemare, M.G.; Graves, A.; Riedmiller, M.; Fidjeland, A.K.; Ostrovski, G.; et al. Human-level control through deep reinforcement learning. Nature 2015, 518, 529–533. [Google Scholar] [CrossRef] [PubMed]
- MathWorks. Deep Learning Toolbox. Design, Train, and Analyze Deep Learning Networks. Available online: https://www.mathworks.com/products/deep-learning.html (accessed on 1 January 2024).
- MathWorks. Reinforcement Learning Toolbox. Design and Train Policies Using Reinforcement Learning. Available online: https://www.mathworks.com/products/reinforcement-learning.html (accessed on 1 January 2024).
- Schulman, J.; Levine, S.; Abbeel, P.; Jordan, M.; Moritz, P. Trust region policy optimization. Int. Conf. Mach. Learn. 2015, 37, 1889–1897. [Google Scholar]
- Lillicrap, T.P.; Hunt, J.J.; Pritzel, A.; Heess, N.; Erez, T.; Tassa, Y.; Silver, D.; Wierstra, D. Continuous control with deep reinforcement learning. arXiv 2015, arXiv:1509.02971. [Google Scholar]
- Schulman, J.; Wolski, F.; Dhariwal, P.; Radford, A.; Klimov, O. Proximal policy optimization algorithms. arXiv 2017, arXiv:1707.06347. [Google Scholar]
- Haarnoja, T.; Zhou, A.; Abbeel, P.; Levine, S. Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor. Int. Conf. Mach. Learn. 2018, 80, 1861–1870. [Google Scholar]
- Fujimoto, S.; Hoof, H.; Meger, D. International conference on machine learning. arXiv 2018, arXiv:1587.1596. [Google Scholar]
- Dutta, D.; Upreti, S.R. A survey and comparative evaluation of actor-critic methods in process control. Can. J. Chem. Eng. 2022, 100, 2028–2056. [Google Scholar] [CrossRef]
- Zhang, B.; Jin, C.; Cao, K.; Lv, Q.; Zhang, P.; Li, Y.; Li, M. Ultra-wide-scanning conformal heterogeneous phased array antenna based on deep deterministic policy gradient algorithm. IEEE Trans. Antennas Propag. 2022, 70, 5066–5077. [Google Scholar] [CrossRef]
- Torben, T.; Smogeli, Ø.; Utne, I.B.; Sørensen, A.J. On Formal Methods for Design and Verification of Maritime Autonomous Surface Ships. 2022. Available online: https://hdl.handle.net/11250/3058210 (accessed on 1 January 2024).
- Hamon, R.; Junklewitz, H.; Sanchez, I. Robustness and Explainability of Artificial Intelligence; Publications Office of the European Union: Luxembourg, 2020; Volume 207. [Google Scholar]
- Kim, M.; Hizir, O.; Turan, O.; Day, S.; Incecik, A. Estimation of added resistance and ship speed loss in a seaway. Ocean Eng. 2017, 141, 465–476. [Google Scholar] [CrossRef]
- Fossen. Marine Systems Simulator (MSS). 2004. Available online: http://www.marinecontrol.org (accessed on 7 January 2024).
- Yasukawa, H.; Sakuno, R.; Yoshimura, Y. Practical maneuvering simulation method of ships considering the roll-coupling effect. J. Mar. Sci. Technol. 2019, 24, 1280–1296. [Google Scholar] [CrossRef]
- Li, S.; Liu, C.; Chu, X.; Zheng, M.; Wang, Z.; Kan, J. Ship maneuverability modeling and numerical prediction using CFD with body force propeller. Ocean Eng. 2022, 264, 112454. [Google Scholar] [CrossRef]
- Moreira, L.; Soares, C.G. Dynamic model of manoeuvrability using recursive neural networks. Ocean Eng. 2003, 30, 1669–1697. [Google Scholar] [CrossRef]
- Van Amerongen, J. Adaptive steering of ships—A model reference approach. Automatica 1984, 20, 3–14. [Google Scholar] [CrossRef]
- Perez, T. Ship Motion Control: Course Keeping and Roll Stabilisation Using Rudder and Fins; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- IMO. Available online: https://wwwcdn.imo.org/localresources/en/publications/Documents/Flyers/Flyers/IG110E.pdf (accessed on 1 January 2024).
- Xiang, J.; Chen, Y.; Li, W. Identification method of offset interference rudder angle and its application in ship steering control system. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 5924–5928. [Google Scholar]
- MAN. Propulsion Trends in Container Vessels. 2019. Available online: https://www.man-es.com/docs/default-source/marine/tools/propulsion-trends-in-container-vessels.pdf?sfvrsn=c48bba16_12 (accessed on 1 January 2024).
- Hull, G. Real-Time Occupancy Grid Mapping Using LSD-SLAM. Ph.D. Thesis, Stellenbosch University, Stellenbosch, South Africa, 2017. [Google Scholar]
- Ugurlu, H.; Cicek, I. Analysis and assessment of ship collision accidents using Fault Tree and Multiple Correspondence Analysis. Ocean Eng. 2022, 245, 110514. [Google Scholar] [CrossRef]
- Pawar, K.S.; Teli, S.N.; Shetye, P.; Shetty, S.; Satam, V.; Sahani, A. Blind-spot monitoring system using LiDAR. J. Inst. Eng. Ser. C 2022, 103, 1071–1082. [Google Scholar] [CrossRef]
- Zixin, W.; Weimin, C.; Hao, H. CFD numerical simulation of a container ship turning motion. J. Phys. Conf. Ser. 2021, 1834, 012020. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Particulars | Symbol | Value |
|---|---|---|
| Length | L | 175 m |
| Beam | B | 25.4 m |
| Draft | T | 8.5 m |
| Depth | D | 11.0 m |
| Displaced volume | ∇ | 21,222 |
| Block coefficient | 0.559 | |
| Maximum commanded rudder angle 1 | 10 deg | |
| Maximum rudder deflection rate 2 | 5 deg/s | |
| Time constant 3 | 1 s | |
| Nominal propeller revolution at 85% SMCR 4 | 99.5 rpm | |
| Nominal speed | 10.41 m/s |
| 1 | ||
|---|---|---|
| −67.42 | 749.72 | 633.84 |
| 2 | ||
| −344.62 | −0.45 | −288.36 |
| 2 | ||
| 3,750,911 | 19.39 |
| 0 | 25 | 0 | 0.48 | −5.47 | 2.60 | |
| 0 | 0 | 25 | 1.53 | −13.60 | 7.54 | |
| 25 | 25 | 0 | 1.61 | −7.52 | 13.60 | |
| 25 | 0 | 25 | 0.36 | −2.38 | 3.46 | |
| 0 | 25 | 0 | 4.26 | 16.41 | −25.90 | 109.03 |
| 0 | 0 | 25 | 53.72 | 17.96 | −26.14 | 80.98 |
| 25 | 25 | 0 | −49.38 | 21.05 | −87.22 | 59.03 |
| 25 | 0 | 25 | 0.03 | 2.37 | −10.49 | 42.22 |
| 0 | 0.14 | 40.41 |
| 10 | 0.24 | 38.27 |
| 20 | 0.75 | 42.87 |
| 30 | 1.69 | 50.17 |
| 40 | 2.00 | 53.59 |
| 50 | 4.57 | 58.14 |
| 60 | 14.63 | 64.33 |
| 1 | 2 | ||||
|---|---|---|---|---|---|
| −67.42 | 749.72 | 633.84 | −65.25 | 751.75 | 719.89 |
| 3 | 4 | ||||
| −344.62 | −0.45 | −288.36 | −296.91 | −0.21 | −281.76 |
| 3 | 4 | ||||
| 3,750,911 | 19.39 | 651,757.60 | 18.97 |
| 0 | 0.14 | 40.41 | 0 | 0.75 | 31.79 |
| 10 | 0.24 | 38.27 | 10 | 0.78 | 23.70 |
| 20 | 0.75 | 42.87 | 20 | 0.60 | 19.60 |
| 30 | 1.69 | 50.17 | 30 | 0.91 | 16.99 |
| 40 | 2.00 | 53.59 | 40 | 0.55 | 14.53 |
| 50 | 4.57 | 58.14 | 50 | 0.65 | 11.44 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, P.; Theotokatos, G.; Boulougouris, E. Robust Decision-Making for the Reactive Collision Avoidance of Autonomous Ships against Various Perception Sensor Noise Levels. J. Mar. Sci. Eng. 2024, 12, 557. https://doi.org/10.3390/jmse12040557
Lee P, Theotokatos G, Boulougouris E. Robust Decision-Making for the Reactive Collision Avoidance of Autonomous Ships against Various Perception Sensor Noise Levels. Journal of Marine Science and Engineering. 2024; 12(4):557. https://doi.org/10.3390/jmse12040557
Chicago/Turabian StyleLee, Paul, Gerasimos Theotokatos, and Evangelos Boulougouris. 2024. "Robust Decision-Making for the Reactive Collision Avoidance of Autonomous Ships against Various Perception Sensor Noise Levels" Journal of Marine Science and Engineering 12, no. 4: 557. https://doi.org/10.3390/jmse12040557
APA StyleLee, P., Theotokatos, G., & Boulougouris, E. (2024). Robust Decision-Making for the Reactive Collision Avoidance of Autonomous Ships against Various Perception Sensor Noise Levels. Journal of Marine Science and Engineering, 12(4), 557. https://doi.org/10.3390/jmse12040557