

Fixed-Time Path-Following-Based Underactuated Unmanned Surface Vehicle Dynamic Positioning Control

Abstract
1. Introduction
2. Preliminaries
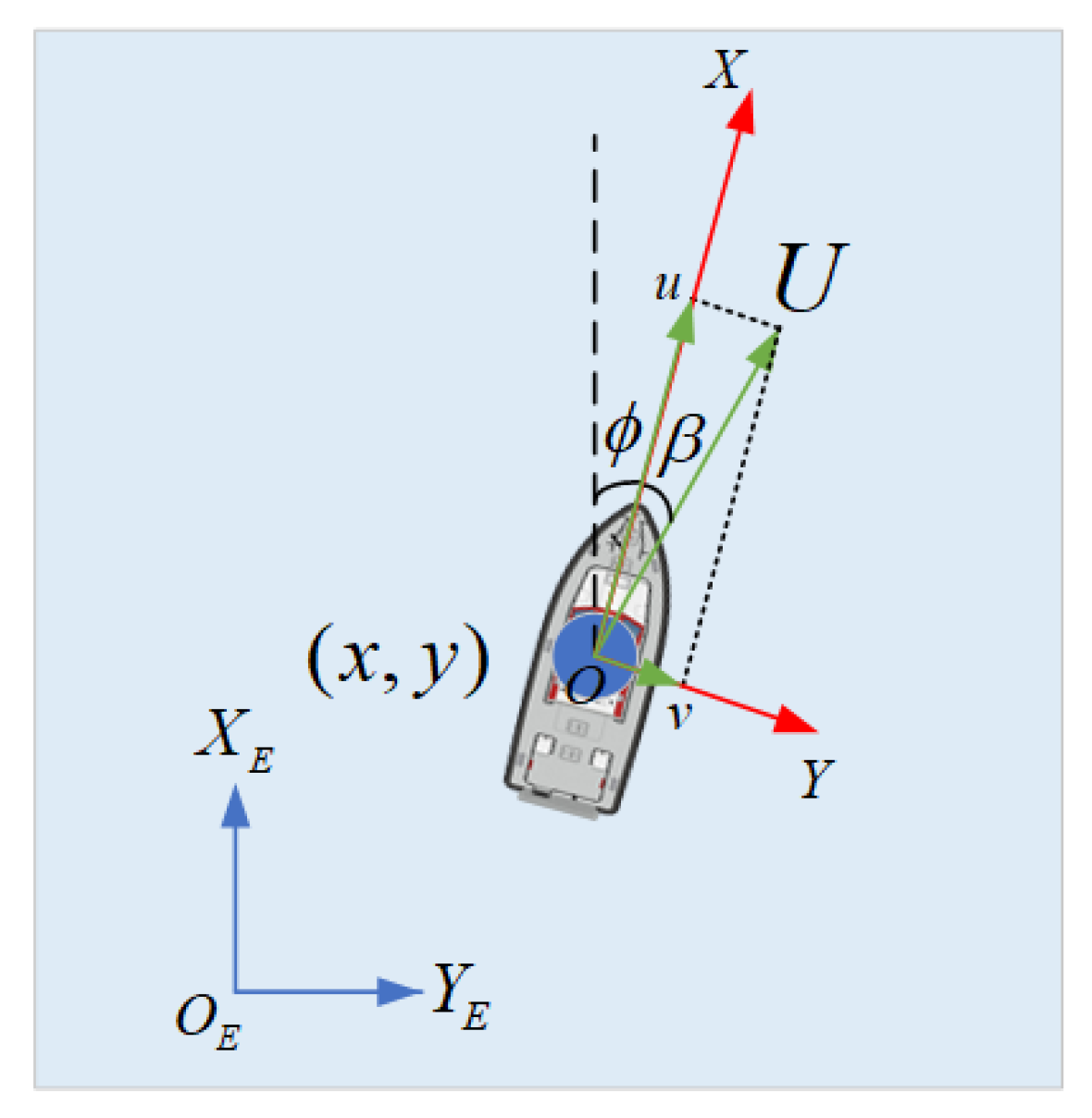
2.1. Description of an Underactuated USV’s Motion
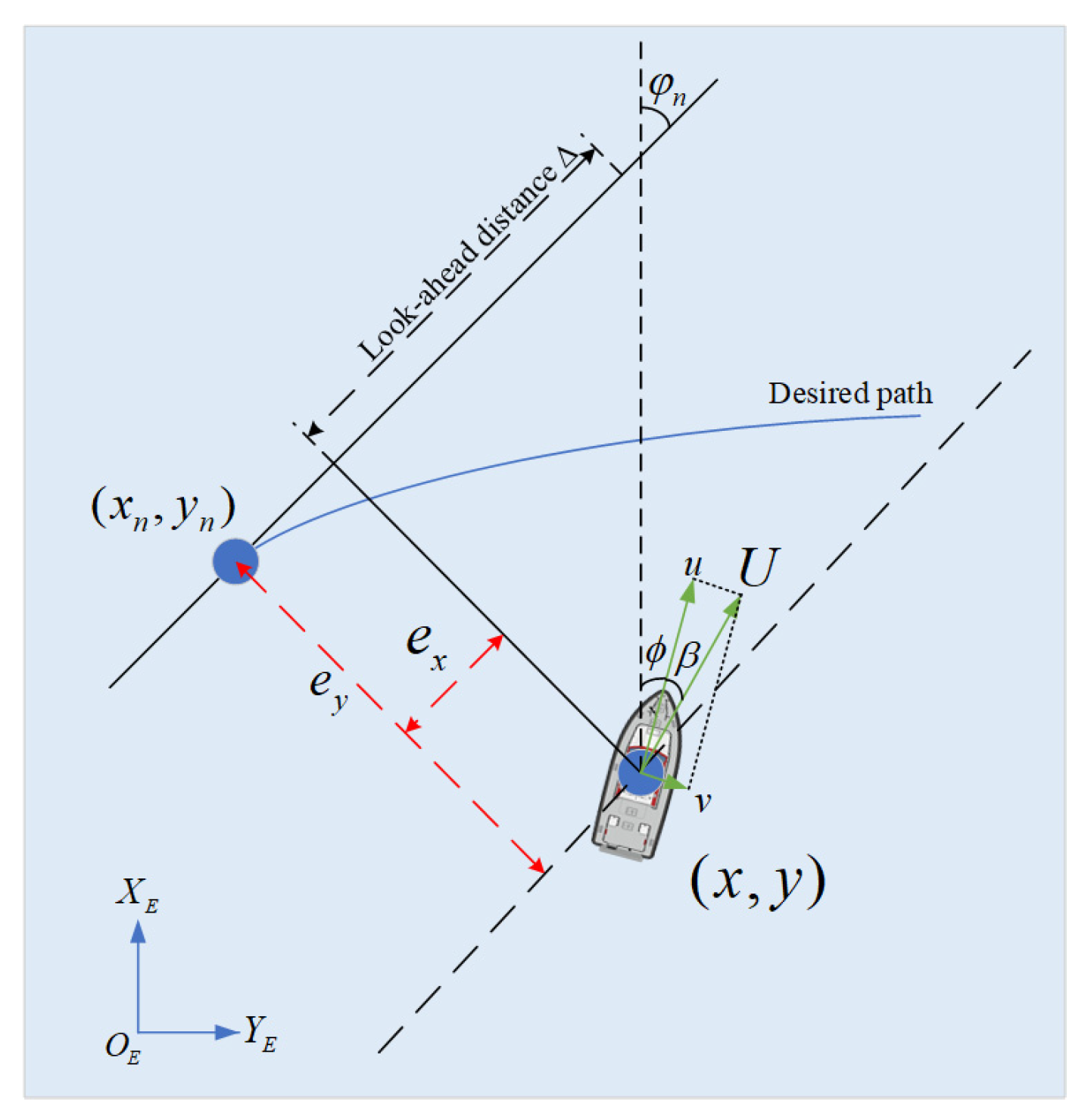
2.2. Tracking Error Dynamics of Underactuated USV
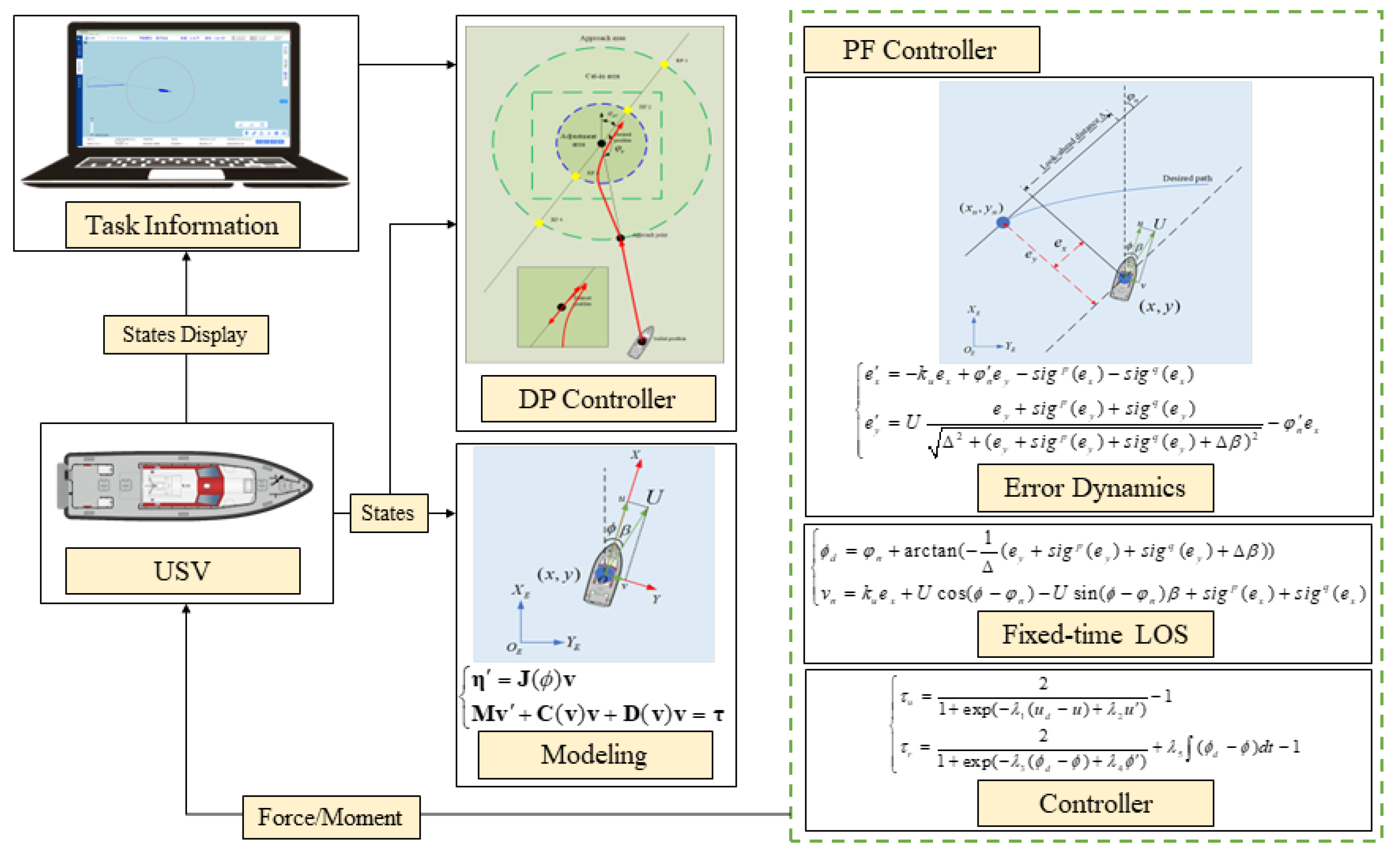
3. Dynamic Positioning Control Structure Design
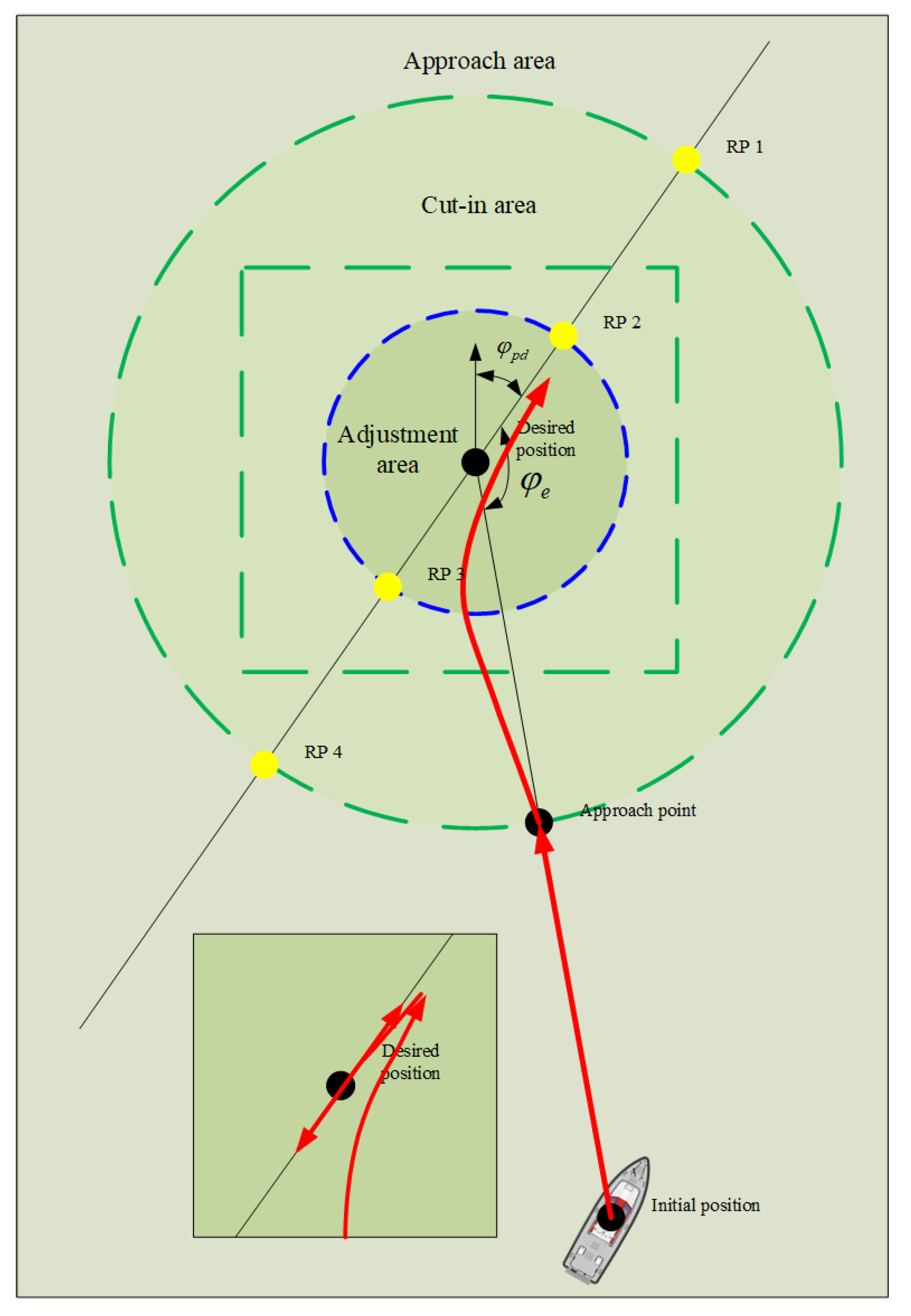
3.1. Design of Dynamic Positioning Scheme
3.2. Fixed-Time LOS Design
4. Analysis of Numerical Simulation and Practical Experiment
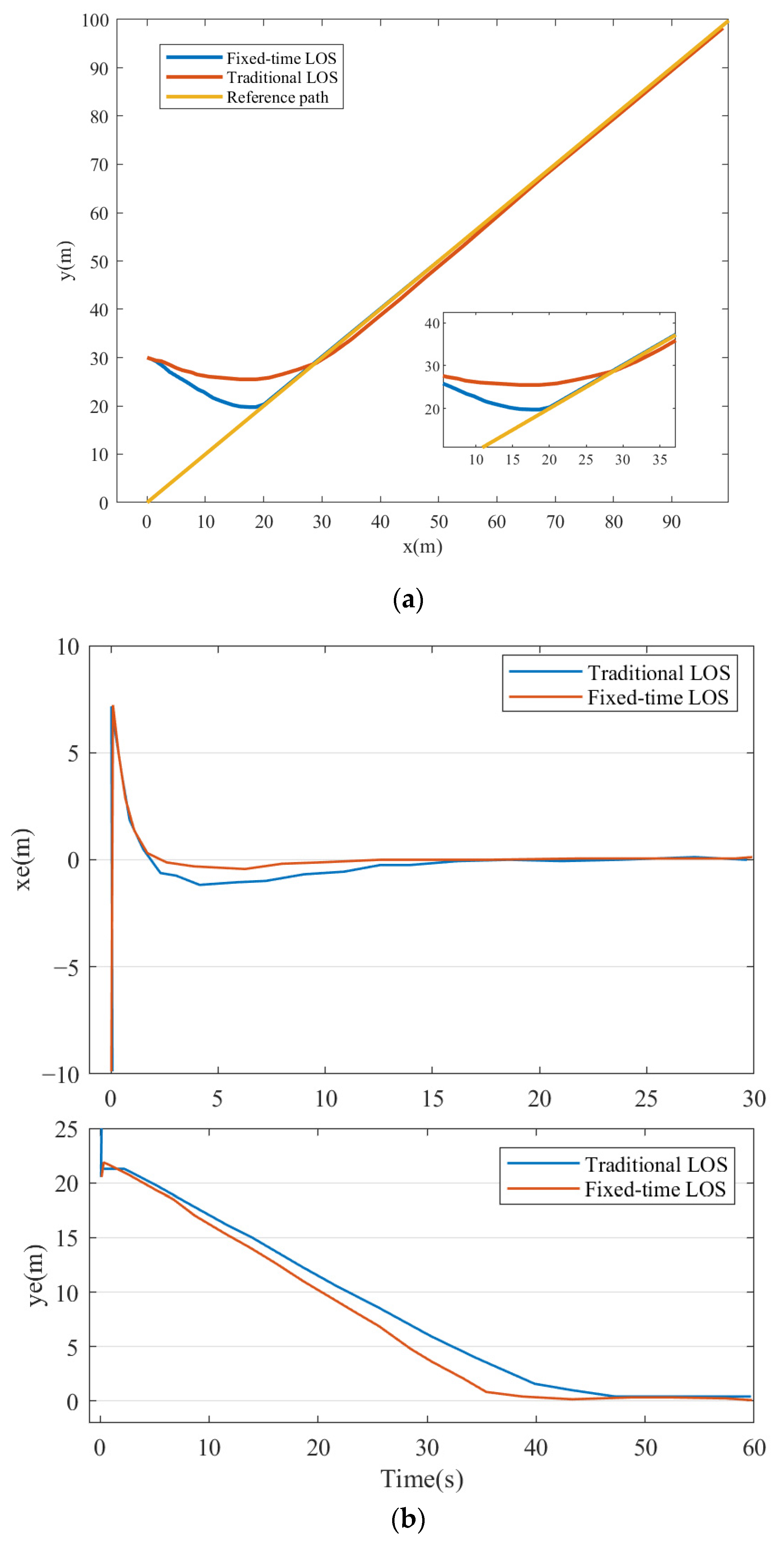
4.1. Numerical Simulation and Its Analysis
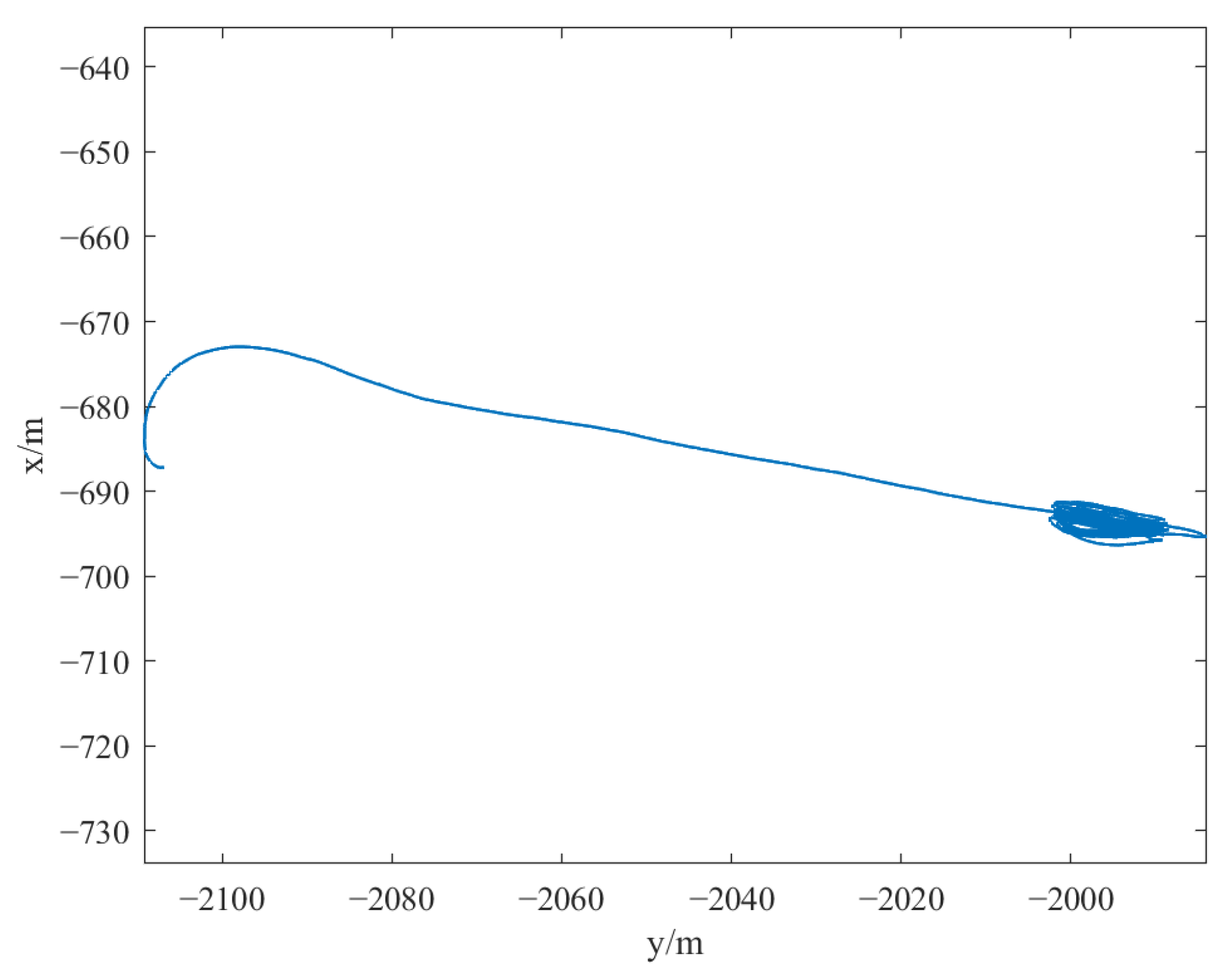
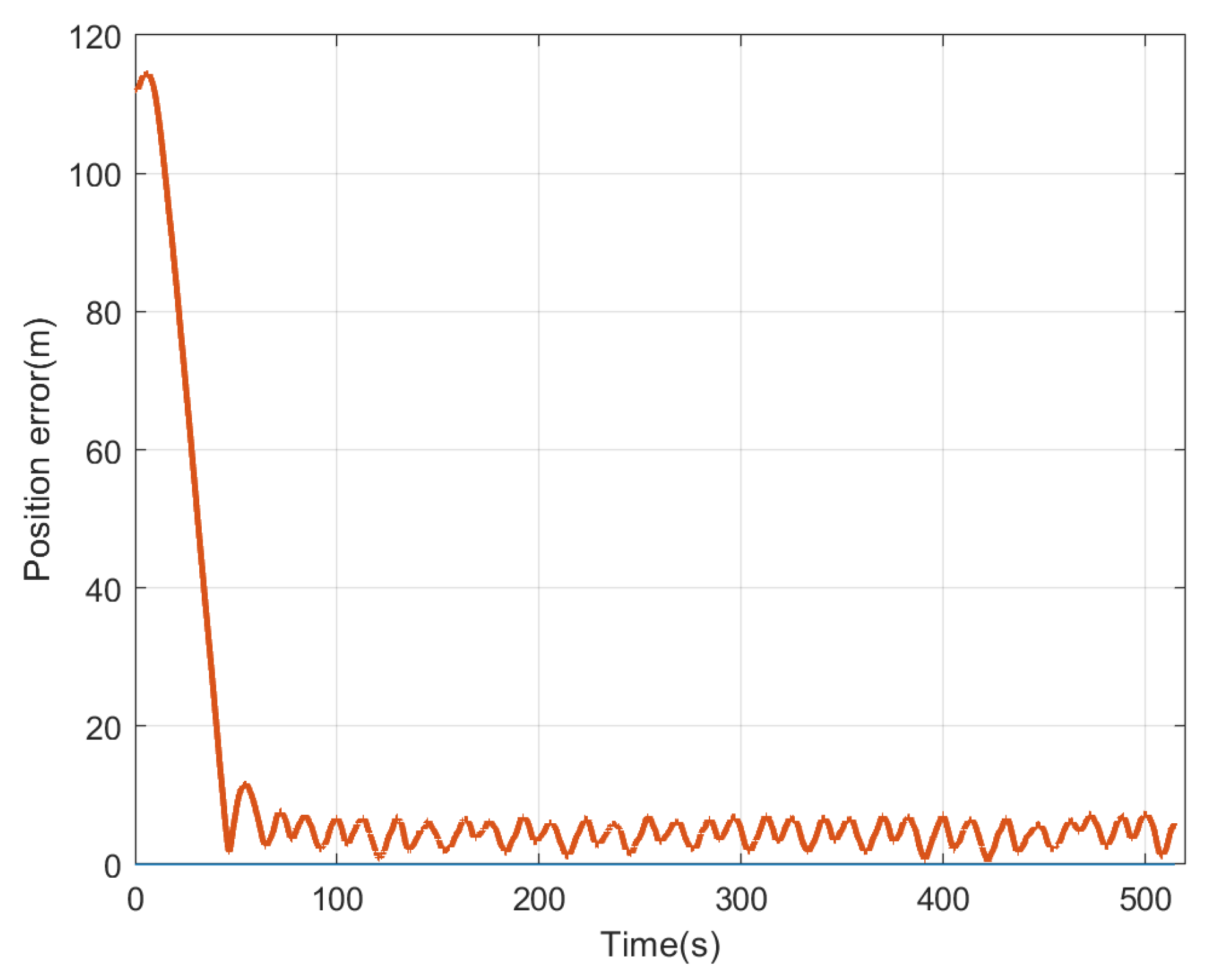
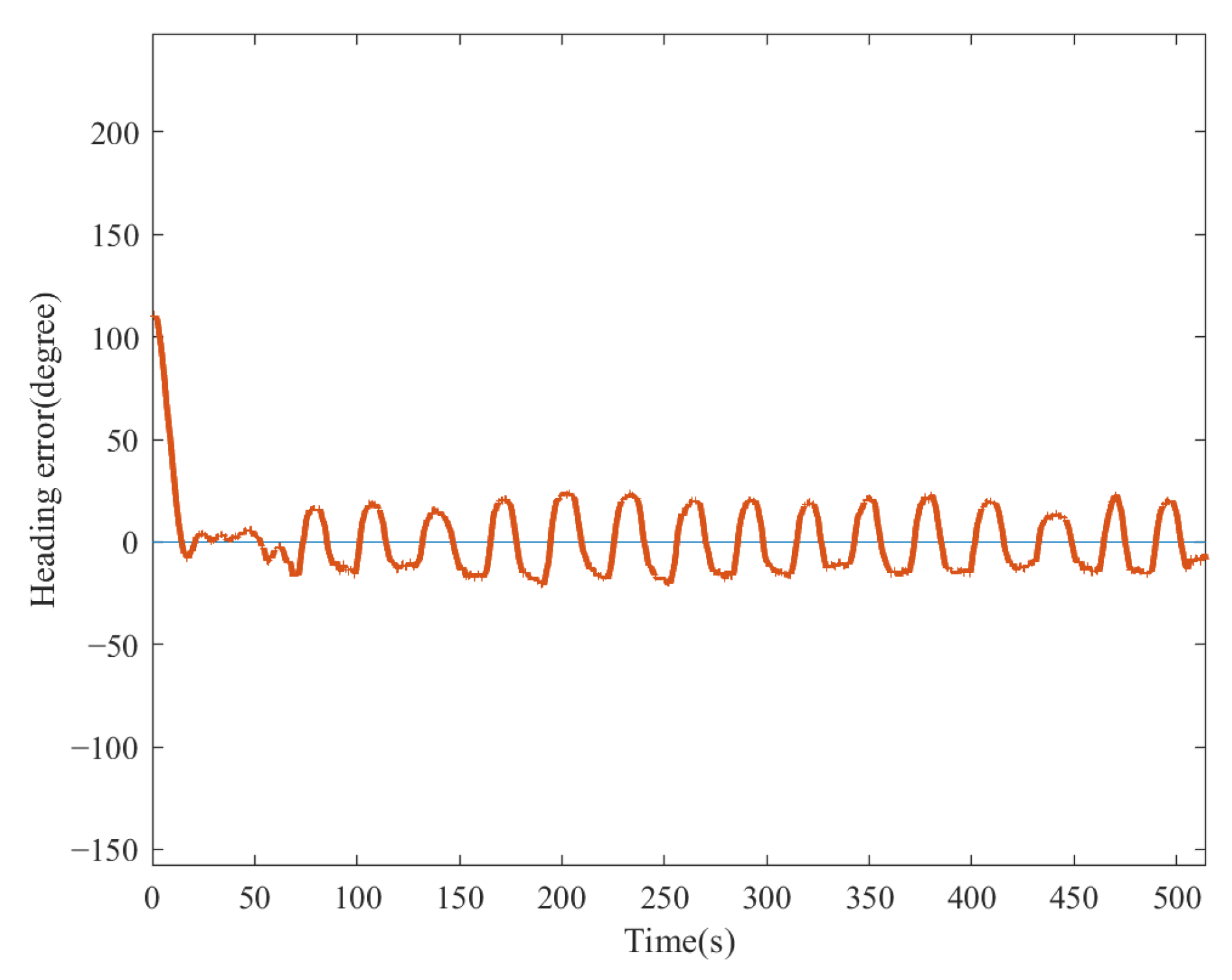
4.2. Practical Experiment and Its Analysis
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, B.; Song, S.; Zhu, C. Finite-time distributed formation control for multiple unmanned surface vehicles with input saturation. Ocean Eng. 2021, 233, 109158. [Google Scholar] [CrossRef]
- Huang, B.; Zhang, S.; He, Y.; Wang, B.; Deng, Z. Finite-time anti-saturation control for Euler–Lagrange systems with actuator failures. ISA Trans. 2022, 124, 468–477. [Google Scholar] [CrossRef] [PubMed]
- Zhou, B.; Huang, B. Two-layer leader-follower optimal affine formation maneuver control for networked unmanned surface vessels with input saturations. Int. J. Robust. Nonlinear Control 2024, 34, 3631–3655. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y. Path Following Control Strategy for Underactuated Unmanned Surface Vehicle Subject to Multiple Constraints. IEEJ Trans. Electr. Electron. Eng. 2022, 17, 229–241. [Google Scholar] [CrossRef]
- Huang, B.; Zhou, B.; Zhang, S. Adaptive prescribed performance tracking control for underactuated autonomous underwater vehicles with input quantization. Ocean Eng. 2021, 221, 108549. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, G.; Xu, Y. Discrete-time adaptive predictive sliding mode trajectory tracking control for dynamic positioning ship with input magnitude and rate saturations. Ocean Eng. 2023, 269, 113528. [Google Scholar] [CrossRef]
- Zhou, B.; Huang, B.; Su, Y.; Zhu, C. Interleaved periodic event-triggered communications based distributed formation control for cooperative unmanned surface vessels. IEEE Trans. Neural Netw. Learn. Syst. 2024. early access. [Google Scholar] [CrossRef]
- Peng, H.; Huang, B.; Miao, J.; Zhu, C.; Zhuang, J. Distributed Finite-time Bearing-based Formation Control for Underactuated Surface Vessels with Levant Differentiator. ISA Trans. 2024, in press. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Li, Y.; Ma, C.; Yan, X.; Jiang, D. Path-following optimal control of autonomous underwater vehicle based on deep reinforcement learning. Ocean Eng. 2023, 268, 113407. [Google Scholar] [CrossRef]
- Hu, X.; Du, J.; Sun, Y. Robust adaptive control for dynamic positioning of ships. IEEE J. Ocean. Eng. 2017, 42, 826–835. [Google Scholar] [CrossRef]
- Sarda, E.I.; Bertaska, I.R.; Qu, A.; Von Ellenrieder, K.D. Development of a USV station-keeping controller. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015. [Google Scholar] [CrossRef]
- Sarda, E.I.; Qu, H.; Qu, A.; Von Ellenrieder, K.D. Station-keeping control of an unmanned surface vehicle exposed to current and wind disturbances. Ocean Eng. 2016, 127, 305–324. [Google Scholar] [CrossRef]
- Vu, M.T.; Le Thanh, H.N.; Huynh, T.T.; Thang, Q.; Duc, T.; Hoang, Q.D.; Le, T.H. Station-Keeping Control of a Hovering Over-Actuated Autonomous Underwater Vehicle Under Ocean Current Effects and Model Uncertainties in Horizontal Plane. IEEE Access 2021, 9, 6855–6867. [Google Scholar] [CrossRef]
- Chellapurath, M.; Walker, K.L.; Donato, E.; Picardi, G.; Stefanni, S.; Laschi, C.; Giorgio-Serchi, F.; Calisti, M. Analysis of station keeping performance of an underwater legged robot. IEEE/ASME Trans. Mechatron. 2021, 27, 3730–3741. [Google Scholar] [CrossRef]
- Aguiar, A.P.; Pascoal, A.M. Dynamic positioning and waypoint tracking of underactuated AUVs in the presence of ocean currents. Int. J. Control 2007, 80, 1092–1108. [Google Scholar] [CrossRef]
- Dong, Z.; Wan, L.; Li, Y.M. Point stabilization for an underactuated AUV in the presence of ocean currents. Int. J. Adv. Robot. Syst. 2015, 12, 1–14. [Google Scholar] [CrossRef]
- Hu, X.; Du, J. Robust nonlinear control design for dynamic positioning of marine vessels with thruster system dynamics. Nonlinear Dyn. 2018, 94, 365–376. [Google Scholar] [CrossRef]
- Xie, W.; Ma, B.; Fernando, T.; Iu, H.H. A simple robust control for global asymptotic position stabilization of underactuated surface vessels. Int. J. Robust Nonlinear Control 2017, 27, 5028–5043. [Google Scholar] [CrossRef]
- Li, H.; Yan, W. Model predictive stabilization of constrained underactuated autonomous underwater vehicles with guaranteed feasibility and stability. IEEE/ASME Trans. Mechatron. 2017, 22, 1185–1194. [Google Scholar] [CrossRef]
- Guo, G.; Zhang, P. Asymptotic stabilization of USVs with actuator dead-zones and yaw constraints based on fixed-time disturbance observer. IEEE Trans. Veh. Technol. 2020, 69, 302–316. [Google Scholar] [CrossRef]
- Fossen, T.I.; Breivik, M.; Skjetne, R. Line-of-sight path following of underactuated marine craft. IFAC Proc. Vol. 2003, 36, 211–216. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y. On uniform semiglobal exponential stability (USGES) of proportional line-of-sight guidance laws. Automatica 2014, 50, 2912–2917. [Google Scholar] [CrossRef]
- Xiao, Y.; Shao, H.; Wang, J.; Yan, S.; Liu, B. Bayesian Variational Transformer: A Generalizable Model for Rotating Machinery Fault Diagnosis. Mech. Syst. Signal Process. 2024, 207, 110936. [Google Scholar] [CrossRef]
- Luo, J.; Shao, H.; Lin, J.; Liu, B. Meta-learning with elastic prototypical network for fault transfer diagnosis of bearings under unstable speeds. Reliab. Eng. Syst. Saf. 2024, 245, 110001. [Google Scholar] [CrossRef]
- Haidong, S.; Xiangdong, Z.; Jian, L.; Bin, L. Few-shot cross-domain fault diagnosis of bearing driven by Task-supervised ANIL. IEEE Internet Things J. 2024. [Google Scholar] [CrossRef]
- Wan, L.; Su, Y.; Zhang, H.; Shi, B.; AbouOmar, M.S. An improved integral light-of-sight guidance law for path following of unmanned surface vehicles. Ocean Eng. 2020, 205, 107302. [Google Scholar] [CrossRef]
- Dai, S.; Wu, Z.; Wang, J.; Tan, M.; Yu, J. Barrier-based adaptive line-of-sight 3-D path-following system for a multi-joint robotic fish with sideslip compensation. IEEE Trans. Cybern. 2022, 53, 4204–4217. [Google Scholar] [CrossRef] [PubMed]
- Fan, Y.; Qiu, B.; Liu, L.; Yang, Y. Global fixed-time trajectory tracking control of underactuated USV based on fixed-time extended state observer. ISA Trans. 2023, 132, 267–277. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.D.; Sun, M.W.; Liu, J. Fixed-Time Predictor-Based Path Following Control of Unmanned. Surf. Veh. Control Theory Appl. 2022, 39, 1845–1853. [Google Scholar]
- Nie, J.; Wang, H.; Lu, X.; Lin, X.; Sheng, C.; Zhang, Z.; Song, S. Finite-time output feedback path following control of underactuated MSV based on FTESO. Ocean Eng. 2021, 224, 108660. [Google Scholar] [CrossRef]
- Qin, H.; Li, C.; Sun, Y.; Li, X.; Du, Y.; Deng, Z. Finite-time trajectory tracking control of unmanned surface vessel with error constraints and input saturations. J. Frankl. Inst. 2020, 357, 11472–11495. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control Syst. Technol. 2014, 23, 820–827. [Google Scholar] [CrossRef]
- Li, J.; Xiang, X.; Dong, D.; Yang, S. Saturated-command-deviation based finite-time adaptive control for dynamic positioning of USV with prescribed performance. Ocean Eng. 2022, 266, 112941. [Google Scholar] [CrossRef]
- Huang, H.; Sharma, S.; Zhuang, Y.; Xu, D. Dynamic positioning of an uninhabited surface vehicle using state-dependent Riccati equation and pseudospectral method. Ocean Eng. 2017, 133, 215–223. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Y.; Sun, C.; Yu, Y. Fixed-time consensus of multi-agent systems with input delay and uncertain disturbances via event-triggered control. Inf. Sci. 2019, 480, 261–272. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2011, 57, 2106–2110. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Y.; Yu, Y.; Liu, H.; Sun, C. A Zeno-free self-triggered approach to practical fixed-time consensus tracking with input delay. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 3126–3136. [Google Scholar] [CrossRef]
- Liu, J.; Ran, G.; Wu, Y.; Xue, L.; Sun, C. Dynamic event-triggered practical fixed-time consensus for nonlinear multiagent systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 2156–2160. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Yazdanpanah, M.J. Performance enhanced model reference adaptive control through switching non-quadratic Lyapunov functions. Syst. Control Lett. 2015, 76, 47–55. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Waypoint 1 | Waypoint 2 | Forward/Backward | Basis |
|---|---|---|---|---|
| 1 | —— | —— | Forward | |
| 2 | Backward | |||
| 3 | Forward | |||
| 4 | USV’s position | Desired position | Forward |
| Mark | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Value | 215 | 265 | 80 | 70 | 100 | 100 | 200 | 50 | 100 |
| Unit |
| Section | Symbol | Value |
|---|---|---|
| Fixed-time LOS guidance | 6.0 | |
| 1.5 | ||
| 0.4 | ||
| 30.0 | ||
| Speed controller | 7.5 | |
| 3.5 | ||
| Heading controller | 12.0 | |
| 3.0 | ||
| 6.5 |
| Section | Symbol | Value |
|---|---|---|
| DP controller |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, S.; Su, Y.; Zhuang, J.; Tang, Y.; Yi, G. Fixed-Time Path-Following-Based Underactuated Unmanned Surface Vehicle Dynamic Positioning Control. J. Mar. Sci. Eng. 2024, 12, 551. https://doi.org/10.3390/jmse12040551
Zheng S, Su Y, Zhuang J, Tang Y, Yi G. Fixed-Time Path-Following-Based Underactuated Unmanned Surface Vehicle Dynamic Positioning Control. Journal of Marine Science and Engineering. 2024; 12(4):551. https://doi.org/10.3390/jmse12040551
Chicago/Turabian StyleZheng, Shuai, Yumin Su, Jiayuan Zhuang, Yueqi Tang, and Guangjie Yi. 2024. "Fixed-Time Path-Following-Based Underactuated Unmanned Surface Vehicle Dynamic Positioning Control" Journal of Marine Science and Engineering 12, no. 4: 551. https://doi.org/10.3390/jmse12040551
APA StyleZheng, S., Su, Y., Zhuang, J., Tang, Y., & Yi, G. (2024). Fixed-Time Path-Following-Based Underactuated Unmanned Surface Vehicle Dynamic Positioning Control. Journal of Marine Science and Engineering, 12(4), 551. https://doi.org/10.3390/jmse12040551