1. Introduction
As the global economy develops, the demand for natural resources is increasing day by day in countries around the world. The Arctic has the world’s largest remaining oil and gas reserves [
1]. Today, the extraction of these resources has resulted in a significant increase in what is known as destination-based shipping—the transportation of goods from the Arctic to non-Arctic destinations. In the coming decades, this type of transportation is expected to increase significantly, driven by new developments in oil and gas, such as the liquefied natural gas (LNG) projects in the Arctic. The use of trans-Arctic shipping routes is another type of Arctic shipping where goods are transported between non-Arctic destinations through Arctic waters. Compared to traditional non-Arctic shipping routes, trans-Arctic shipping may offer a range of advantages, with the most significant being distance savings. For example, for shipping between northern Europe and the Far East, trans-Arctic shipping along the Northern Sea Route (NSR) has reduced the distance by 40% compared to the traditional route through the Suez Canal [
2].
Assessment of ice loads is a core issue in the design of ships for ice-covered areas, and icebreaking ships are the key pieces for ensuring the development of polar resources and Arctic shipping. The assessment of ice loads can be achieved through various methods, including theoretical analysis, empirical formulae, numerical simulation, and experimental methods, all of which can predict the resistance of ships in ice-covered areas to a certain extent. By using the physical parameters of ships and sea ice, as well as mechanical performance indicators of sea ice, ice loads can be evaluated [
3]. However, sea ice is usually considered flat ice in these evaluation methods, and only the ice load at a specific moment and position during the navigation in ice-covered areas can be calculated, without reflecting the changes in the polar ice field. Nevertheless, the navigation of icebreaking ships in ice-covered areas is a continuous stochastic process, in which the physical parameters and types of sea ice within the ice field vary in time and space, although the ship’s hull parameters remain unchanged.
When a ship is moving in ice-covered waters, homogeneous sea ice conditions are never observed in reality. The sea ice conditions concerning the physical properties (i.e., microstructure, thickness, salinity, porosity, and density) and the mechanical properties (i.e., tensile, flexural, shear, uni- and multi-axial compression strength, elastic and strain modulus, Poisson’s ratio, fracture toughness, and friction) usually vary significantly. Many of these properties are not studied well [
4]. These variations could be referred to as “external” statistics, i.e., the stochasticness of the ice-induced loads due to the variation in ice conditions [
5].
Research by Mikko Suominen et al. shows that the properties and conditions of ice, as well as the ice loads on ships caused by working in sea ice, can be described by probability distributions. They analyzed the influence of the inverse coefficient of variation on the exponential distribution, lognormal distribution, and Weibull distribution [
6]. Mikko Kotilainen et al. obtained data on sea ice thickness and icebreaker ship speed in the Baltic Sea and identified ice loads from the measurement data using a Rayleigh separator. Assuming that the ice loads are generated by a common stochastic process, they studied the relationship between the ship speed, ice thickness, and ice loads [
7]. A. Suyuthi et al. performed statistical inference on the peak ice loads on the ship’s local structure using a set of special data provided by a full-scale measurement on a coast guard vessel during a winter voyage in 2007. They considered various methods for selecting statistical models for ice loads and estimating parameters, extended and analyzed each process, and verified the validity of some typical probability models [
5,
8]. Zhang Dayong et al. considered the uncertainty of ice loads in the process of ice resistance of offshore platform structures, established a simplified mechanical model using the Pushover method, and analyzed the probability models of resistance and ice loads using the K-S test [
9]. Due to the extensive stochasticness in ice conditions, ice behavior, and contact scenarios, ice loads measured on the hull frames always show high stochastics. Typically, the load peaks are of concern. Probabilistic approaches are usually adopted to model the stochastic load peaks [
10,
11]. Extreme value statistics of ice loads, even in applications, have very often been based on asymptotic results. It is assumed that the epochal extremes, for example, yearly extreme wind speeds, are distributed according to the generalized (asymptotic) extreme value distribution with unknown parameters to be estimated on the basis of the observed data. The extreme values of ice loads are directly related to the reliability of the vessels since the ultimate limit states (ULSs) are generally based on extreme load effects [
12]. Former studies of extreme ice load predictions are mainly based on the classic extreme value theory, which includes the peak amplitude approach [
13], the asymptotic method [
14,
15], and the ACER method [
16]. In the former method, statistical models are introduced to describe the parent (initial) distribution of loads based on the measured peak amplitudes of the ice-induced loads. When the parent distribution is known, the extreme value distribution is given in the form of the power of the encountered number of events [
16].
The peak amplitude method among the three methods requires the ice load data to be a stationary stochastic process; the ACER method can predict the extreme ice loads well without considering the outliers, and the asymptotic method is based on asymptotic assumptions, and its evaluation effect depends on the time and quantity of ice load observation data. When using statistical models and methods to describe the interaction between icebreakers and sea ice, a sufficient amount of ice load sample data is required. These sample data can be obtained through shipboard monitoring, making the experimental data valuable but difficult to obtain. Full-scale experiments on ice–structure interaction processes are very valuable in gaining a first-hand understanding of ice loads. The measured peak ice load values are stochastic [
17], and the results from full-scale (and model-scale) experiments often show a wide scatter, making analyzing the data challenging [
18]. In brief, it is very unpredictable to repeat an experiment with the same parameterization due to the challenging environment and due to the inherent inhomogeneity of sea ice. The limited availability of experimental data on peak ice loads on structures is also a challenge [
19]. With the development of numerical simulation technology, various methods such as finite element [
20,
21,
22], discrete element [
23,
24,
25,
26], and smoothed particle hydrodynamics methods [
27,
28] have been applied to the numerical simulation of ship–ice interaction, and the simulation accuracy has gradually improved. The results of reliable numerical simulation also provide a source of data for load data statistics [
29,
30]. Here, we aim to increase the understanding of ice loads in ice–structure interaction by performing a statistical study on ice load data obtained by 2D combined finite–discrete element method (FEM-DEM) simulations. In more detail, we analyze the distribution of the data and seek error estimates for cases where only a low number of observations are available or the observed interaction processes are short [
18]. The main objective of our work is to provide a reasonable extreme value estimation of ice-induced loads on ship hulls by utilizing available collected data from the full-scale measurements. This paper first conducts a statistical analysis of sea ice thickness data in the Arctic ice area and constructs a stochastic ice field that meets the environmental conditions of Arctic sea ice. Then, based on the stochastic ice field, the simulation process of the direct navigation and turning of icebreaking ships is carried out to obtain the ship ice load database. Finally, the distribution laws of ice loads on the ship’s bow and hull are studied, and the asymptotic method is used to predict the extreme ice load values on icebreaking ships in direct navigation and turning states in stochastic ice fields.
The present paper is organized as follows.
Section 2 describes the method for generating a stochastic ice field based on the rejection sampling technique.
Section 3 describes the numerical model and results of ice failure by an icebreaker.
Section 4 shows the relevant results of the ship’s ice load distribution.
Section 5 presents the related results of the extreme prediction of the ice load based on the asymptotic method. The advantages of the proposed approach are illustrated through relevant examples. The methods, results, and conclusions of this paper are expected to contribute to the development of reliability-based designs for ships operating in polar regions.
2. Establishment of a Stochastic Ice Field
Sea ice in the Arctic region exhibits complex diversity, with different distribution characteristics depending on the sea area and ice age. Arctic sea ice zones are classified into fixed ice zones and drift ice zones, as well as transitional ice zones based on their movement state, and based on their external shape, they can be classified into types such as flat ice, overlapping ice, piled ice, ice ridges, and icebergs. The distribution of sea ice thickness is different in the same temporal ice field. During winter voyages, icebreaking ships encounter different sea ice when navigating in polar regions. Many researchers have studied the icebreaking resistance of ships in the ice field and established many empirical and theoretical formulas. The more commonly used formulas for calculating icebreaking resistance are Lindqvist’s formula and Riska’s formula [
31,
32], both of which are semi-theoretical and semi-empirical formulas established based on real ship test data. In assessing the ice load of an icebreaking ship, it is related not only to the hull’s own parameters but also to the parameters characterizing the ice field. Among them, the sea ice thickness parameter becomes a parameter that must be considered in the icebreaking resistance assessment method. Therefore, selecting the Arctic sea ice thickness as a stochastic variable for the ice field and other parameters as deterministic parameters, this paper aims to establish a stochastic ice field model that conforms to the distribution characteristics of sea ice thickness in the Arctic ice zone. Based on the sea ice thickness data from the winter months of 2010–2019 in the Arctic provided by the US National Snow and Ice Data Center (NSIDC) [
33,
34], the probability density function of sea ice thickness is determined using non-parametric estimation, and the K-S test is used to verify whether the distribution of the sample data conforms to the hypothesized theoretical distribution. Then, using the Monte Carlo simulation method and the rejection sampling method to obtain a sufficient number of new datasets, a stochastic ice field data model can be constructed. Long-term data on other physical parameters, such as sea ice bending strength and uniaxial compression strength, are difficult to obtain temporarily and can be viewed as deterministic parameters using literature field test data.
2.1. Probability Density Function of Sea Ice Thickness
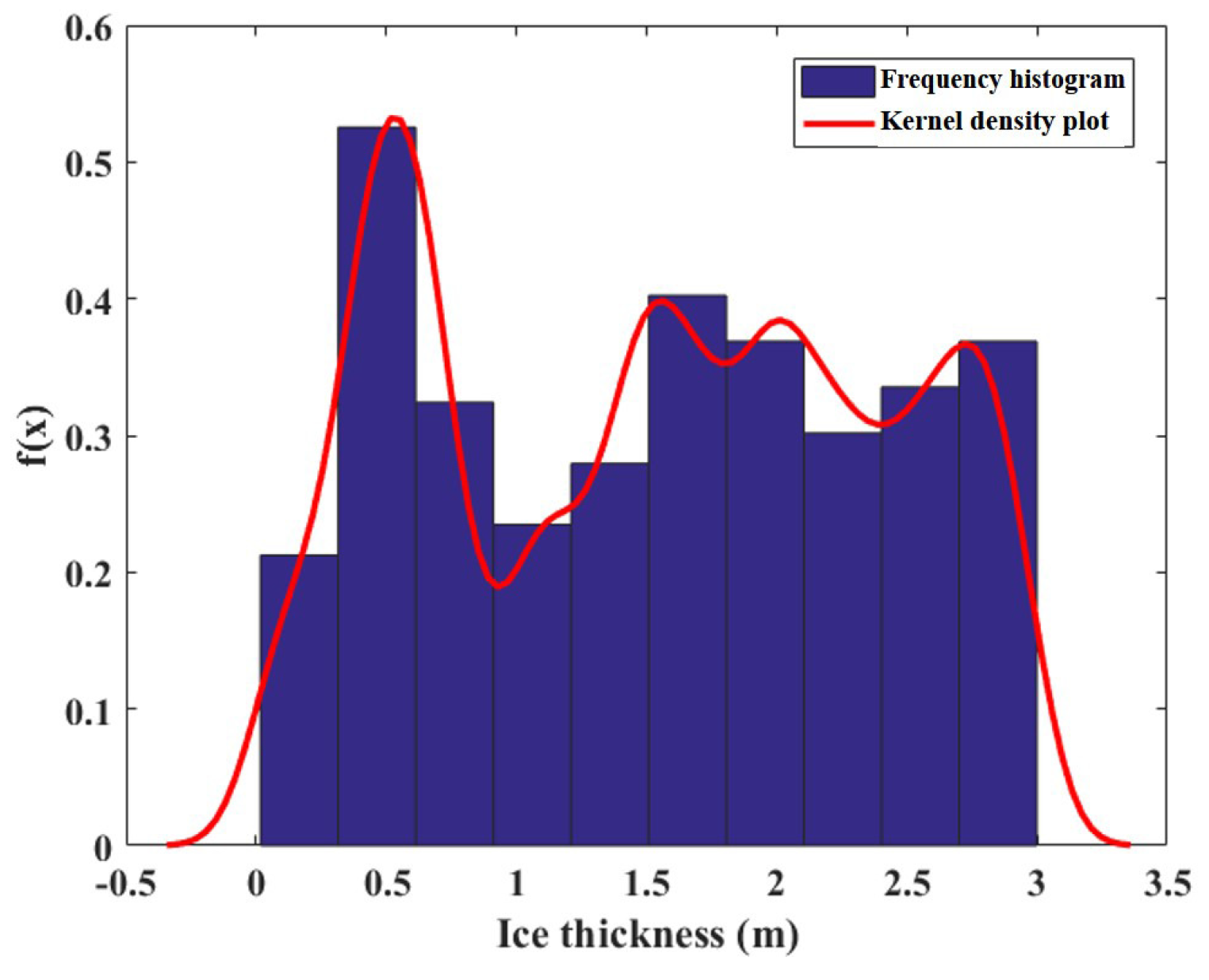
Based on the Arctic sea ice thickness data provided by the National Snow and Ice Data Center (NSIDC) in the United States, statistical analysis was performed on the sea ice thickness data. The frequency distribution histogram of the Arctic sea ice thickness sample data was plotted (
Figure 1), where the vertical axis represents the value of the frequency divided by the group spacing (the number of individuals falling in each group of sample data is called the frequency, and the frequency divided by the total number of samples is the frequency). As shown in
Figure 1, it can be seen that the sample data exhibits an asymmetric distribution with multiple peaks in many places. Based on the distribution characteristics, the probability density function of the sample data was estimated using kernel density estimation.
The two main steps of kernel density estimation are determining the kernel function
and the bandwidth
h, where the choice of bandwidth
h is crucial. For the kernel function
, a Gaussian kernel function is used because it has good smoothness and excellent mathematical properties [
35]. In this paper, a Gaussian kernel function is chosen, and its expression is as follows:
Combined with the definition formula of kernel density estimation, it can be obtained that
The estimation formula only contains the unknown parameter bandwidth
h. Since the distribution of the sample data does not conform to normal distribution or other known distributions, it does not meet the conditions for applying the empirical rule proposed by Silverman [
36], and therefore the plug-in method cannot be used to determine the appropriate bandwidth
h. Cross-validation will be used to solve for the bandwidth
h. The main principle of using cross-validation to select an appropriate bandwidth
h is to minimize the integrated squared error (ISE). The calculation formula for ISE is as follows:
Equation (
3) contains three terms, where the first two terms are related to the bandwidth
h, while the third term is independent of the bandwidth
h. Let
and
be the first two terms in Equation (
3), and let
be a function of the bandwidth
h.
Therefore, selecting the bandwidth
h to minimize Equation (
3) is equivalent to selecting the bandwidth
h to minimize Equation (
4). Therefore, the appropriate bandwidth
h is the solution
.
For
, it can be directly obtained from the definition of
, which is
Among which,
,
is the selected kernel function. For
, it is related to both the bandwidth
h and the currently unknown
term. Considering the definition of the mathematical expectation
for continuous stochastic variables, we have the following:
At this point, we can use
to estimate Equation (
6). To obtain the expression
, we first remove the
i-th sample observation from the sample data
X to form a new sample dataset
. Then, using
and the kernel density estimation method, we can obtain the expression for
:
Therefore, the expression for
is as follows:
By comparing the two methods of obtaining the bandwidth h mentioned above, it can be seen that the applicability of the plug-in method is limited. It requires the distribution of the sample data to be similar to a normal distribution or other known distributions to further determine the value of the bandwidth h, which limits its application. Compared with the plug-in method, although the cross-validation method has a larger computational cost and may not be easy to calculate with a large number of samples, the bandwidth h obtained is more theoretically and has a wider range of applications.
By substituting Equation (
1) into the expression
above, we can obtain
Substituting Equation (
9) into Equation (
5), we can obtain the first term of the function
regarding the bandwidth
h.
Substituting Equation (
1) into Equation (
8), we can obtain
Thus, we can obtain the expression of function
regarding the bandwidth
h. Let
be equal to a certain value, and we can then solve for the bandwidth
. Therefore, the probability density function of Arctic sea ice thickness is as follows:
Plotting the obtained kernel density estimation function onto a histogram of frequency distribution, we can compare the trends between the two. As shown in
Figure 2, it can be observed that within the range of [0, 3], the trend of the kernel density estimation function is consistent with the variation pattern of the sea ice thickness, exhibiting an asymmetric and non-unimodal distribution, and there are no outliers present.
2.2. Goodness-of-Fit Test
The probability density function of Arctic sea ice thickness in this paper cannot be directly obtained by an explicit expression of the distribution function. The K-S test is performed by comparing the values of
and
at the discrete point
.
Figure 3 shows the distribution function
of sea ice thickness and the empirical cumulative distribution
of the sample data. From the figure, it can be seen that
has a stepwise increasing distribution, and with an increase in sample size, this stepwise property tends to become smoother. The fitting degree between
and
is good, and the curve is smooth without any outliers. Both show a consistent trend, gradually increasing from 0 to 1 monotonically, which conforms to the changing pattern of the distribution function of stochastic variables in nature. The maximum difference between the two occurs at
, and the calculated test statistic is
. By taking the confidence level
and looking up the table based on the sample size
n and confidence level
, the critical value
c is determined to be 0.0941. Since the test statistic
is less than the critical value
c, it can be concluded that the distribution law of Arctic sea ice thickness is consistent with the distribution function obtained by kernel density estimation in this paper.
2.3. Construction of a Stochastic Ice Field
Based on the probability density function of sea ice thickness in the Arctic region, stochastic numbers that follow the probability density function can be generated using Monte Carlo simulation. However, since the probability density function obtained by kernel density estimation in this study is a weighted average of several Gaussian kernel functions and each term is similar in form to a normal distribution, there is no explicit distribution function that can be used for the inverse transform method to generate new stochastic numbers directly. Therefore, the rejection sampling method is adopted in this study to generate the sea ice thickness data required for building a stochastic ice field. The finite element model established using this method will be more in line with reality, thus addressing the limitations of numerical simulations that use flat ice (with a fixed thickness) to build ice fields.
5. Estimation of Ship Ice Load Extreme Values
Based on the generation of stochastic ice fields and numerical simulation of the icebreaking process of an icebreaker, a large number of ice load time history curves generated during straight-line and rotational motion of an icebreaker in ice fields can be obtained. This method was used to obtain 48 ice load time history curves, each with a time range of (0, 30) s. Using the asymptotic method, the extreme ice loads on different parts of the ship were estimated during straight-line and rotational icebreaking, and the possible range of variation of ice load extreme values was determined.
5.1. Asymptotic Method
The progressive method, also known as the time window method, can be used when the initial distribution function
is difficult to determine. Similarly, this method regards the icebreaking process of a ship as a stochastic process
with a duration of
. The difference from the peak amplitude method is that a time interval
t is set, and the duration range is uniformly divided into
K segments, with the peak ice load values of each segment denoted as
,
where
. Utilizing these peak ice load values, the extreme value type I distribution is used to approximate the extreme value distribution function of the ice load.
The expression for the extreme value type I distribution
is as follows:
In the formula,
a and
b are parameters that can be determined using maximum likelihood estimation or least squares estimation. The estimation formula for the parameters is Equation (
15):
where
is the Euler constant and
. Therefore, for a small transcendental probability
, in conjunction with Equations (
13)–(
15), the extreme value of the ice load can be estimated. The estimated value of the ice load’s extreme value is Equation (
16):
5.2. Estimation of Ice Load Extremes in Straight-Line Motion
In this study, the time interval
t was set to 8 s, and the interval (0, 637) was uniformly divided into
parts. The peak ice load
was determined for each small interval, resulting in 80 ice load peak data samples. The sample data
were then substituted into Equation (
15), which gives
and
. Assuming a transcendental probability of
and substituting it into Equation (
16), the ice load extreme for region 4, when an icebreaker moves straight in a stochastic ice field, can be estimated, which gives an estimated result of
kN.
It is worth noting that among the 25479 ice load sample data obtained, the ice load extreme in region 4 was 2718.8 kN. During all the numerical simulations of the straight-line motion of the icebreaker, only 3 samples had ice loads greater than kN, accounting for 0.01% of all the sample data, and 213 samples had ice loads greater than kN, accounting for 0.8% of all the sample data. Using frequency approximation instead of probability, it can be considered an extremely small probability event. Therefore, the estimated results obtained by both methods are acceptable. From a numerical point of view, the peak amplitude method is more conservative than the asymptotic method. In practical consideration of the ship design for straight-line motion, the estimated results of the peak amplitude method can be used for region 4, but it may lead to a lower material utilization efficiency. Alternatively, only the results obtained by the asymptotic method can be considered, but this may result in smaller estimated ice load extremes. The best approach is to comprehensively consider the results obtained by both methods and assume that the ice load extreme in region 4 ranges between and , which can ensure that the mechanical performance of the ship’s material is fully utilized and avoid underestimating the ice load extremes.
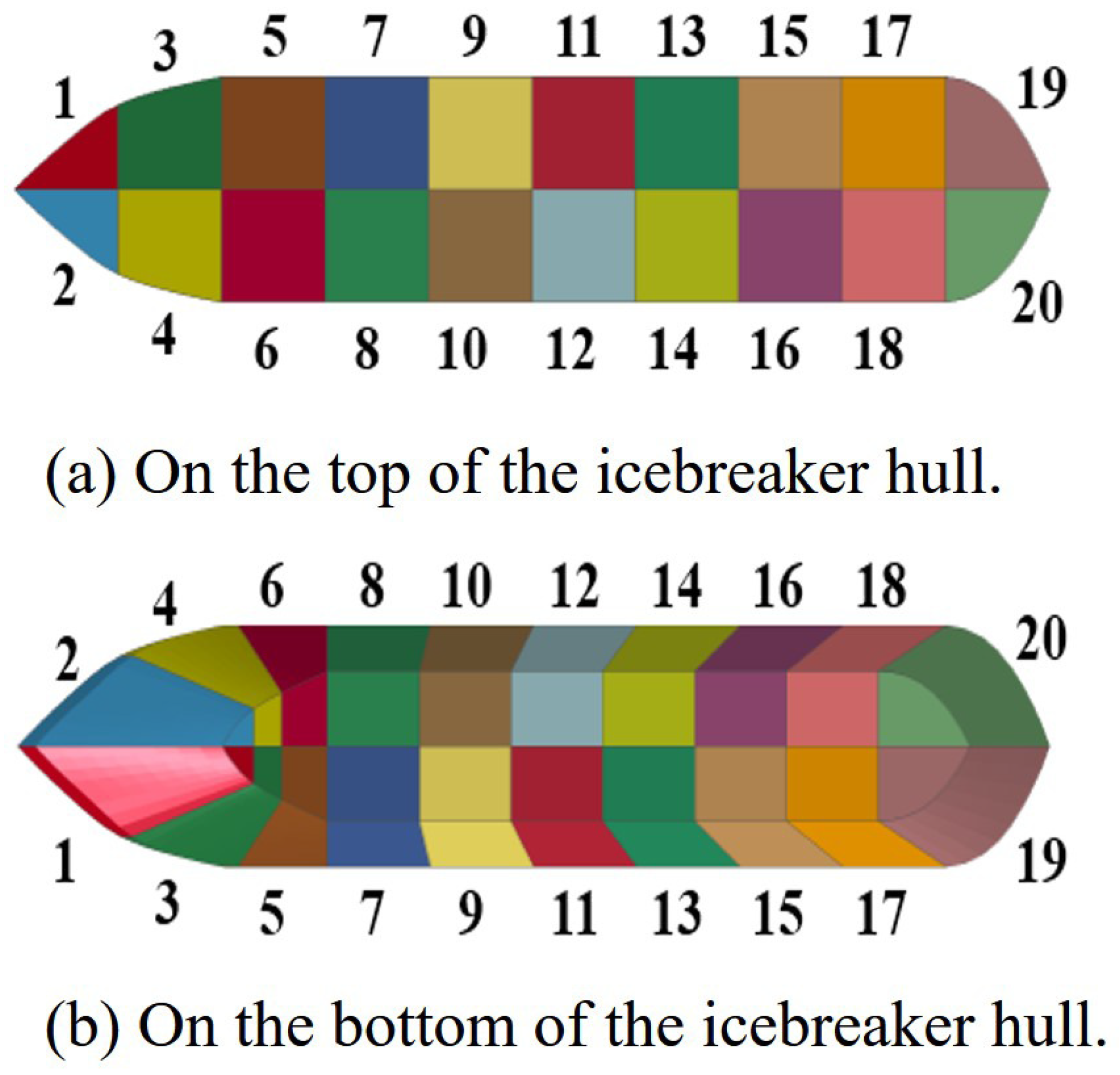
The asymptotic method was used to estimate the ice load extremes in regions 1–8 of the icebreaker, and the estimated results are shown in
Figure 18. From the figure, it can be seen that the variation trend of the estimated results has a certain symmetry. The estimated results first decrease from the middle of the bow towards both sides and then become flat at regions 1 and 8. Regions 1 and 8 are transition zones located at the junction of the bow and hull and need to have a certain resistance to ice loads.
5.3. Estimation of Ice Load Extremes in the Rotational Case
The asymptotic method is used to estimate the extreme ice loads at the bow, midship, and stern of the icebreaking ship in a rotational state. Regions 2, 16, and 20 are selected to represent the bow, midship, and stern of the icebreaking ship, respectively. This provides some reference for the force situation of the icebreaking ship in a rotational state.
Figure 19 shows the estimated extreme ice loads for regions 2, 16, and 20 of the icebreaking ship in a rotational state. From the figure, it can be seen that the extreme ice load in region 16 located at the midship is greater than those in regions 2 and 20 located at the bow and stern. The estimated result in region 16 is 51.3% higher than that in region 2 and 45.4% higher than that in region 20. The main reason is that in the rotational process of the icebreaking ship, the failure mode of the sea ice at the midship is dominated by compression failure, leading to a larger value of ice load. At the bow and stern, there is a certain inclination angle forming a conical hull structure, making the failure mode of the sea ice dominated by bending failure. The extreme ice loads at the bow and stern are almost the same, with a difference of 17.4%.
6. Conclusions
In this study, based on probability and statistical analysis, a probability distribution function of sea ice thickness in the Arctic was determined. A stochastic ice field was constructed by using Monte Carlo simulation to generate a sufficient number of sea ice thickness samples. Then, a numerical model of ice–ship interaction was built based on the parameters of the “Xuelong 2” and the stochastic ice field model. The validity of the numerical model was verified by experimental results. Finally, the ice load time history data were obtained based on the numerical model, and the extreme ice loads on the icebreaker in straight and rotational motion states in the ice field were estimated using the asymptotic method. The following conclusions were drawn:
(1) It is feasible to use the acceptance–rejection sampling method to generate a random thickness ice field and combine it with finite element numerical simulation of the icebreaking process for assessing icebreaking resistance.
(2) In the straight state of the ship motion in the ice field, the local ice loads at the bow showed a high trend but were smaller in both the midhull and stern areas. In the rotational state, the ice loads at the ship’s midship were significantly higher than those at the bow and stern, mainly because the primary failure mode of sea ice at the midship was crushing. The ice load on the hull reaches its maximum value when the ship is turned about 45°.
(3) The asymptotic method is applicable for estimating the extreme ice loads of icebreaking ships, and the estimated results reflect the changing trends of ice loads in different regions.
The limitation of the work in this paper is that only the sea ice thickness was chosen as a stochastic parameter of the ice field, while other sea ice mechanical parameters were regarded as deterministic parameters. However, in practice, the mechanical parameters of sea ice are also highly stochastic, and in the future it will be necessary to include the stochastic variations of these parameters in the collection and statistics of other mechanical parameters of sea ice and in the establishment of the stochastic ice field model.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}