
Multibody Analysis of Wave Energy Converters and a Floating Platform in the Time Domain


Abstract
1. Introduction
2. Numerical Analysis
2.1. System Identification
2.2. Multibody Equation of Motion
3. Results and Discussion
3.1. Regular Wave Simulations
3.1.1. Multiple Rotor Effect
3.1.2. Fixed Platform Effect
3.1.3. Floating Platform Effect
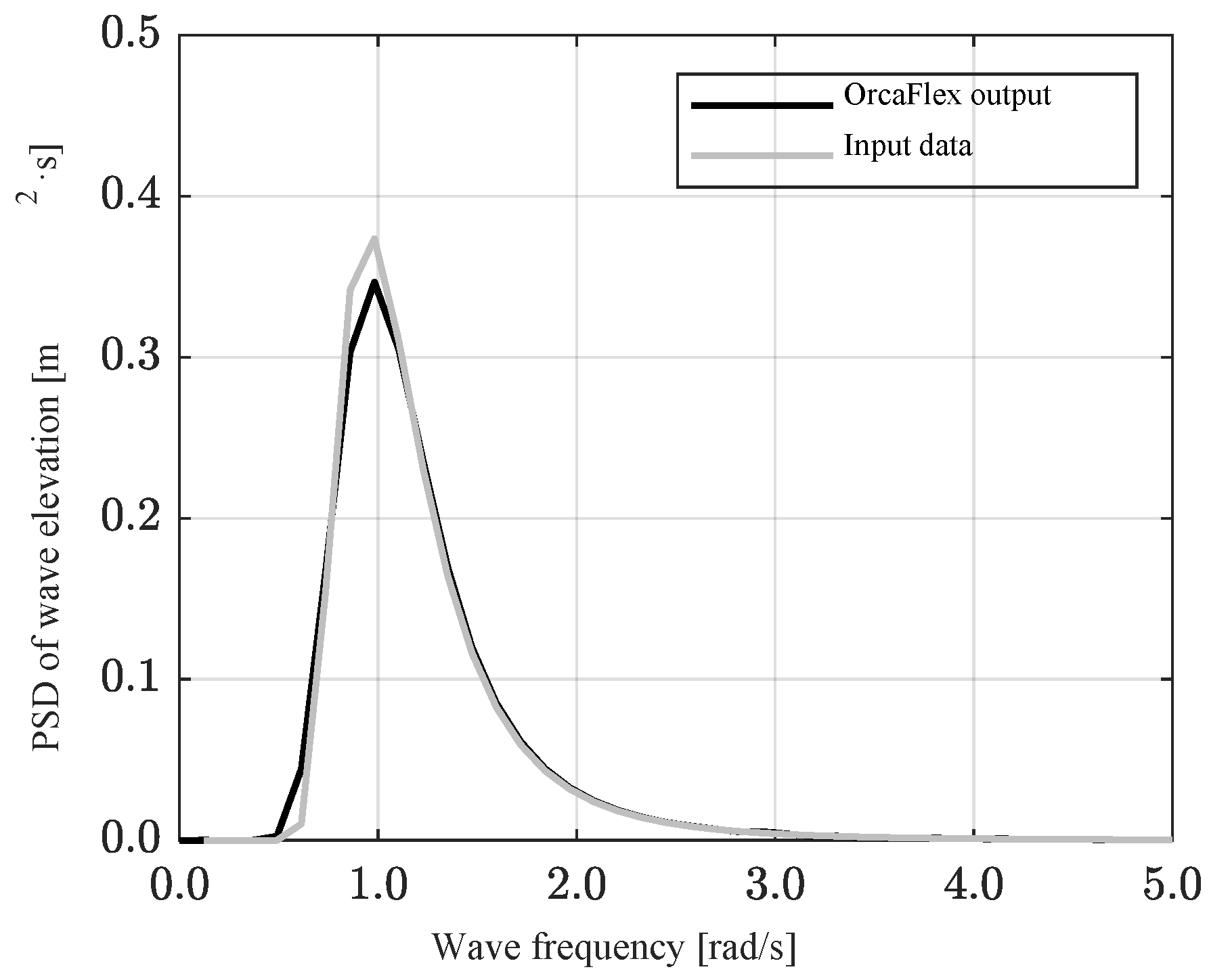
3.2. Irregular Wave Simulations
4. Conclusions
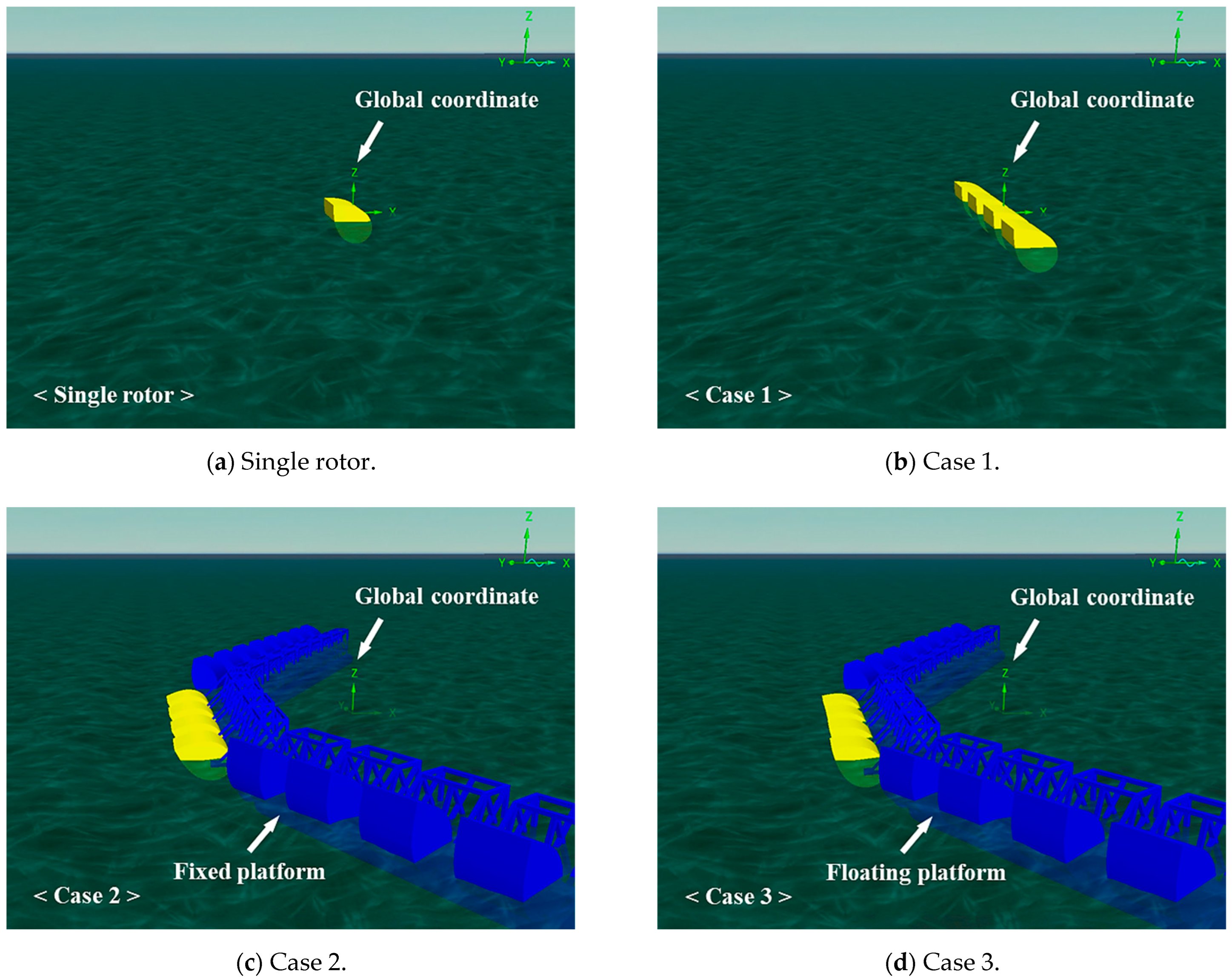
- Several scenarios were analyzed to understand the hydrodynamic interaction between the floating platform and rotors: a single rotor, an array of four rotors (case 1), rotors connected to a fixed platform (case 2) and a scenario allowing for the movement of the connected platform (case 3). The arrangement of four rotors facilitated a comparison of radiation and diffraction effects. Connecting the rotor to a fixed platform highlighted the hydrodynamic interaction between the platform structure and the rotor. Allowing for platform movement provided insights into the system’s performance under operational conditions.
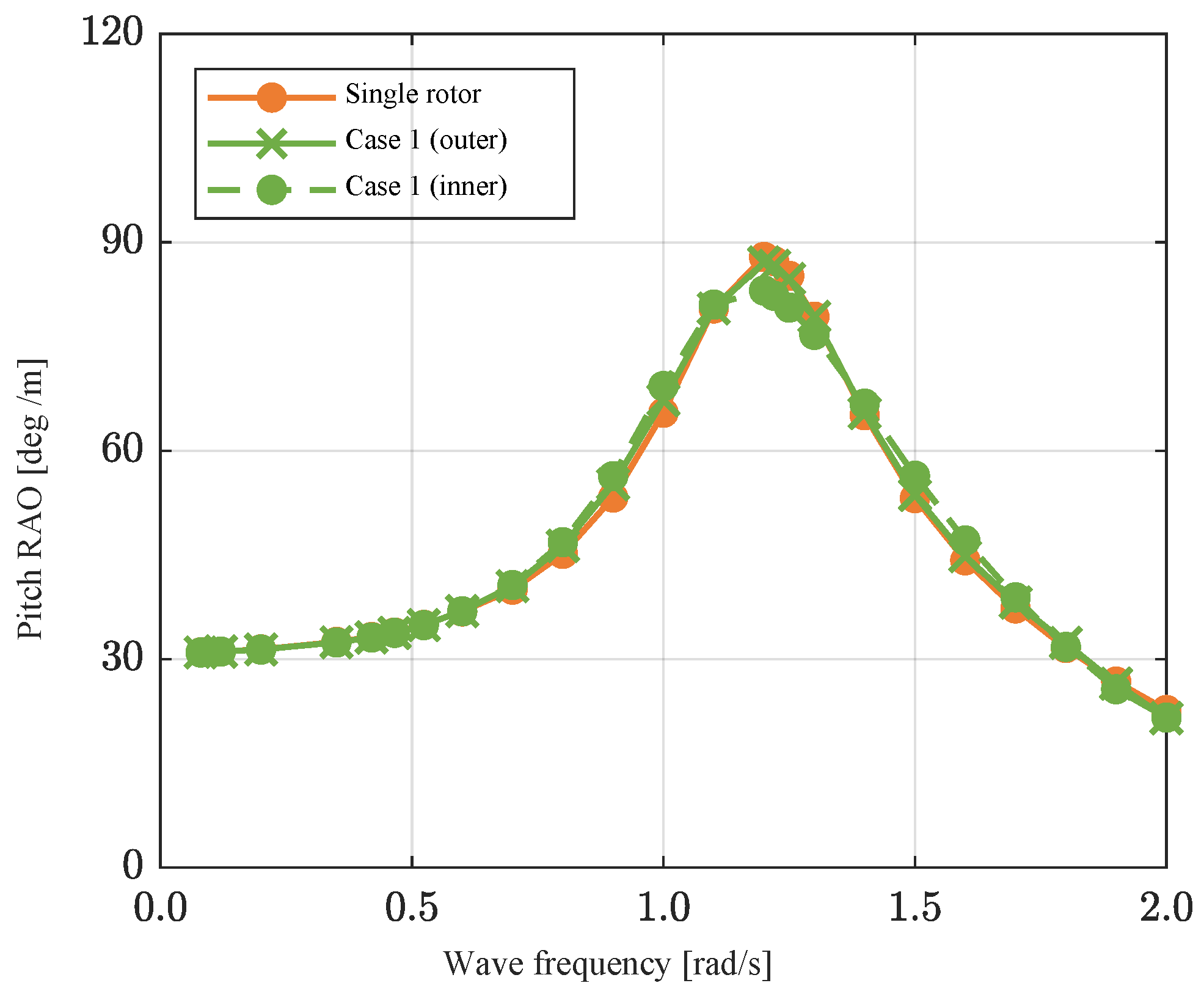
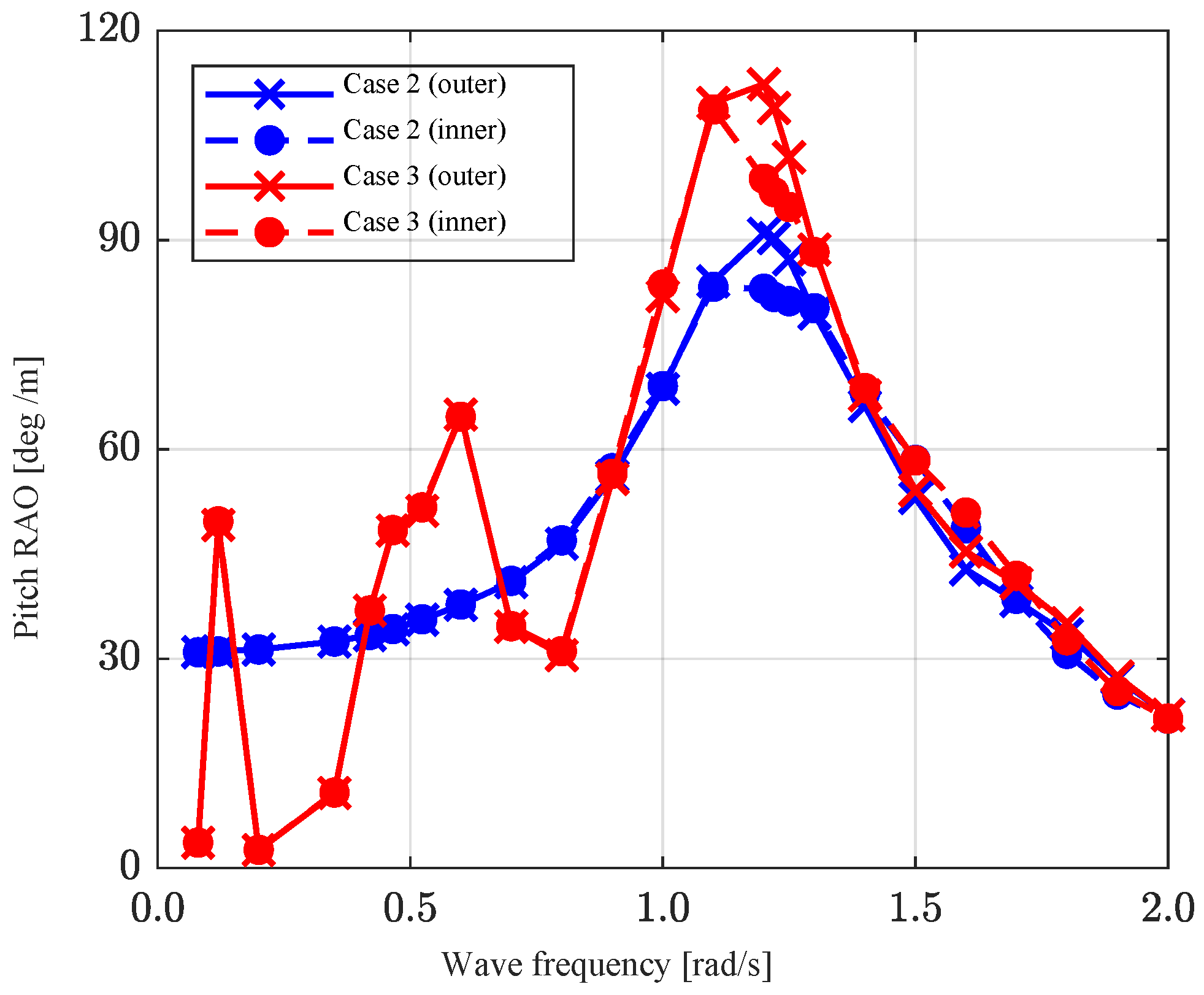
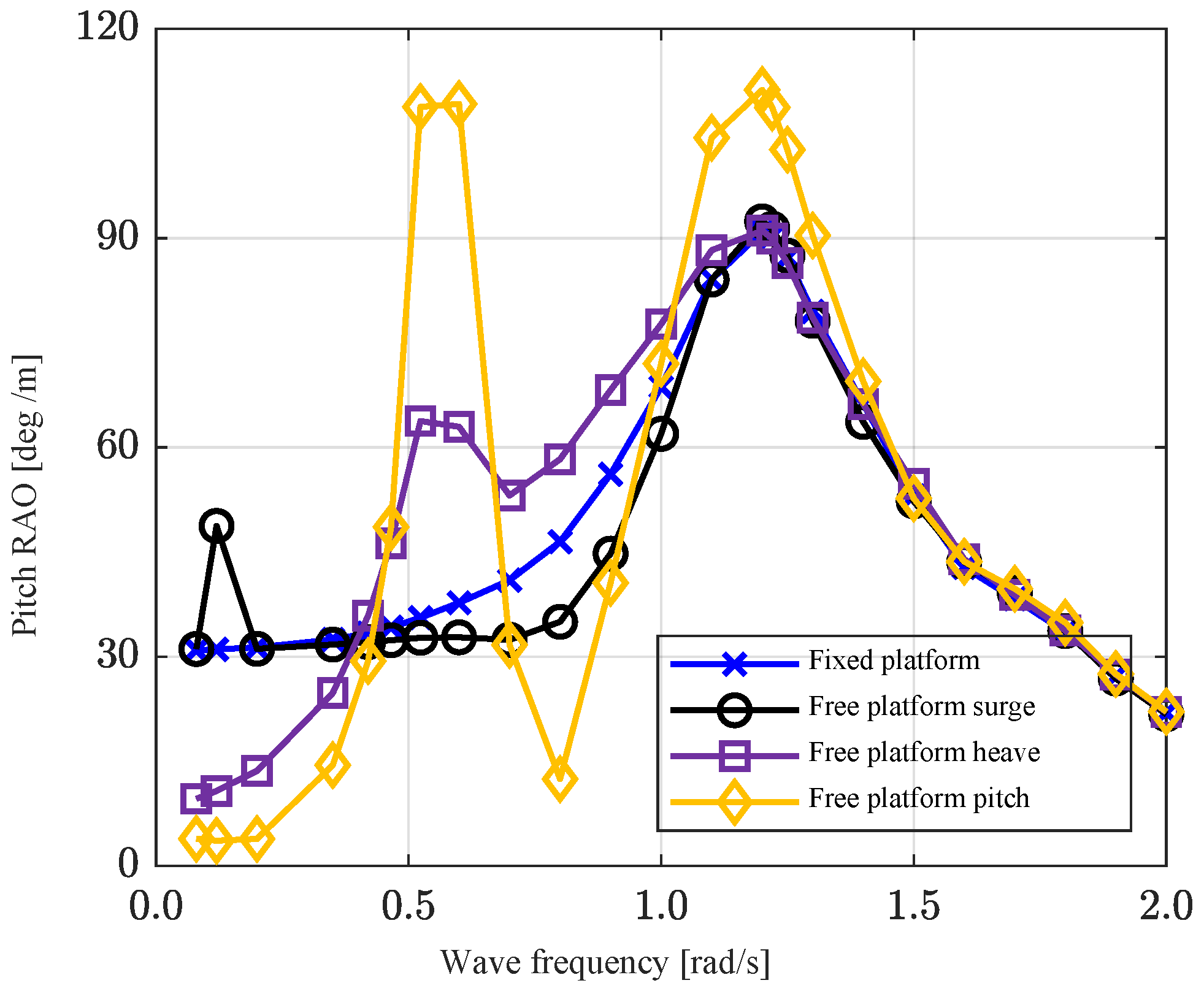
- Regular wave simulations, conducted at a relatively low wave height of 0.1 m for various incident wave frequencies, aimed to characterize the rotor’s behavior, assuming it operated as a linear system. The results from case 1 indicated differences in motion between inner and outer rotors due to their arrangement. Case 2 demonstrated the influence of platform pontoons on rotor behavior. However, the differences observed in these two scenarios were minor. In contrast, the motion response of the rotor changed significantly when connected to a floating platform, with the main peak frequency shifting marginally to the low-frequency region and the emergence of two peak responses in regions outside the natural frequency range. The floating platform’s heave and pitch motions substantially impacted the rotor’s behavior.
- Irregular wave simulations under operational conditions were conducted to assess the rotor’s performance when connected to a floating platform in real sea conditions. Time series data from a 3 h simulation were converted into power spectra for comparison. The results from the three cases (single rotor, case 1 and case 2) were generally similar. However, case 3 exhibited a higher peak value and a significant response at approximately 0.6 rad/s. The peak frequency of the rotor, approximately 1.22 rad/s, shifted marginally to the low-frequency region when connected to a floating platform. Considering that the peak frequency of the incident wave (operating condition) was 0.945 rad/s (6.65 s), the rotor operated close to resonance. Additionally, the inherent pitch motion of the rotor caused by wave forcing was combined with the pitch response derived from the heave and pitch of the platform, increasing the response in a specified wave frequency range.
- Compared to the power extracted by a single rotor under operating conditions, the power generated in case 1 and with rotors connected to a fixed platform increased by approximately 1.86% and 4.45%, respectively. Allowing for the platform’s degree of freedom resulted in a power increase of more than 29%. Although the trend in results may vary depending on the hydrodynamic characteristics of the platform and WECs, the case in this study demonstrated a positive influence on the efficiency of power generation. In other words, examining the rotor under the assumption of a fixed axis poses the risk of either underestimating or overestimating the extraction power potential of the actual floating model. This underscores the importance of considering the dynamic interactions between the floating platform and rotors as essential factors when assessing the efficiency of power generation in real systems.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Butterfield, S.; Musial, W.; Jonkman, J.; Sclavounos, P. Engineering Challenges for Floating Offshore Wind Turbines; Technology Report; National Renewable Energy Lab (NREL): Golden, CO, USA, 2007. Available online: https://www.osti.gov/servlets/purl/917212 (accessed on 27 December 2023).
- Salter, S.H.; Jeffrey, D.C.; Taylor, J.R.M. First Year Interim Report on Edinburgh Wave Power Project: Study of Mechanisms for Extracting Power from Sea Waves; University of Edinburgh: Edinburgh, UK, 1975; Available online: http://hdl.handle.net/1842/23409 (accessed on 27 December 2023).
- Jeffrey, D.C.; Richmond, D.J.E.; Salter, S.H.; Taylor, J.R.M. Second Year Interim Report on Edinburgh Wave Power Project: Study of Mechanisms for Extracting Power from Sea Waves; University of Edinburgh: Edingburg, UK, 1976. [Google Scholar]
- Evans, D.V. A theory for wave-power absorption by oscillating bodies. J. Fluid Mech. 1976, 77, 1–25. [Google Scholar] [CrossRef]
- Count, B.M. On the dynamics of wave-power devices. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1978, 363, 559–579. [Google Scholar] [CrossRef]
- Poguluri, S.K.; Bae, Y.H. A study on performance assessment of WEC rotor in the Jeju western waters. Ocean Syst. Eng. 2018, 8, 361–380. [Google Scholar] [CrossRef]
- Poguluri, S.K.; Cho, I.H.; Bae, Y.H. A study of the hydrodynamic performance of a pitch-type wave energy converter-rotor. Energies 2019, 12, 842. [Google Scholar] [CrossRef]
- Kim, D.; Poguluri, S.K.; Ko, H.S.; Lee, H.; Bae, Y.H. Numerical and experimental study on linear behavior of salter’s duck wave energy converter. J. Ocean Eng. Technol. 2019, 33, 116–122. [Google Scholar] [CrossRef]
- Kim, D.; Poguluri, S.K.; Bae, Y.H. Numerical study on linear behavior of arrayed pitch motion wave energy converters. J. Korean Soc. Coast. Ocean. Eng. 2020, 23, 269–276. [Google Scholar] [CrossRef]
- Mavrakos, S.A. Hydrodynamic coefficients for groups of interacting vertical axisymmetric bodies. Ocean Eng. 1991, 18, 485–515. [Google Scholar] [CrossRef]
- Mclver, P. Wave Forces on Arrays of Floating Bodies. J. Eng. Math. 1984, 18, 273–285. [Google Scholar] [CrossRef]
- Taghipour, R.; Moan, T. Efficient frequency-domain analysis of dynamic response for the multi-body wave energy converter in multi-directional wave. In Proceedings of the 18th International Offshore and Polar Engineering Conference, Vancouver, BC, Canada, 6–11 July 2008. [Google Scholar]
- Sinha, A.; Karmakar, D.; Soares, C.G. Performance of optimally tuned arrays of heaving point absorbers. Renew. Energy 2016, 92, 517–531. [Google Scholar] [CrossRef]
- Poguluri, S.K.; Kim, D.; Ko, H.S.; Bae, Y.H. Performance analysis of multiple wave energy converters due to rotor spacing. J. Ocean. Eng. Technol. 2021, 35, 229–237. [Google Scholar] [CrossRef]
- Heo, K.; Choi, Y.R. Numerical investigation of multi-body wave energy converters’ configuration. J. Ocean Eng. Technol. 2022, 36, 132–142. [Google Scholar] [CrossRef]
- Kim, H.; Min, E.-H.; Heo, S.; Koo, W. Motion analysis of a wind-wave energy TLP platform considering second-order wave forces. J. Ocean Eng. Technol. 2022, 36, 390–402. [Google Scholar] [CrossRef]
- Konispoliatis, D.N.; Mavrakos, S.A.; Katsaounis, G.M. Theoretical evaluation of the hydrodynamic characteristics of arrays of vertical axisymmetric floater of arbitrary shape in front of a vertical breakwater. J. Mar. Sci. Eng. 2020, 8, 62. [Google Scholar] [CrossRef]
- Muliawan, M.J.; Karimirad, M.; Moan, T. Dynamic response and power performance of a combined spar-type floating wind turbine and coaxial floating wave energy converter. Renew. Energy 2013, 50, 47–57. [Google Scholar] [CrossRef]
- Zhou, B.; Hu, J.; Jin, P.; Sun, K.; Li, Y.; Ning, D. Power performance and motion response of a floating wind platform and multiple heaving wave energy converters hybrid system. Energy 2023, 265, 126314. [Google Scholar] [CrossRef]
- Zhou, B.; Hu, J.; Zhang, Q.; Wang, L.; Jing, F.; Collu, M. Optimal design and performance analysis of a hybrid system combining a semi-submersible wind platform and point absorbers. J. Mar. Sci. Eng. 2023, 11, 1190. [Google Scholar] [CrossRef]
- Kamarlouei, M.; Gaspar, J.F.; Calvario, M.; Hallak, T.S.; Mendes, M.J.G.C.; Thiebaut, F.; Guedes Soares, C. Experimental analysis of wave energy converters concentrically attached on a floating offshore platform. Renew. Energy 2020, 152, 1171–1185. [Google Scholar] [CrossRef]
- Ghafari, H.R.; Ghassemi, H.; He, G. Numerical study of the Wavestar wave energy converter with multi-point-absorber around DeepCwind semisubmersible floating platform. Ocean Eng. 2021, 232, 109177. [Google Scholar] [CrossRef]
- Cheng, Y.; Dai, S.; Dai, S.; Ji, C.; Collu, M.; Yuan, Z.; Incecik, A. Energy conversion and hydrodynamic analysis of multi-degree-of-freedom wave energy converters integrated into a semi-submersible platform. Energy Convers. Manag. 2022, 252, 115075. [Google Scholar] [CrossRef]
- Yazdi, H.; Ghafari, H.R.; Ghassemi, H.; He, G.; Karimirad, M. Wave power extraction by multi-Salter’s duck WECs arrayed on the floating offshore wind turbine platform. Energy 2023, 278, 127930. [Google Scholar] [CrossRef]
- Swift-Hook, D.T.; Count, B.M.; Glendenning, I.; Salter, S. Characteristics of a rocking wave power device. Nature 1975, 254, 504–506. [Google Scholar] [CrossRef]
- Cummins, W. The Impulse Response Function and Ship Motions; David Taylor Model Basin: Washington, DC, USA, 1962. [Google Scholar]
- WAMIT, Inc. Available online: https://www.wamit.com (accessed on 27 December 2023).
- AeroHydro, Inc. Available online: https://aerohydro.com/ahi_products/multisurf (accessed on 27 December 2023).
- Journée, J.M.J.; Massie, W.W. Offshore Hydromechanics; Delft University of Technology: Delft, The Netherlands, 2001. [Google Scholar]
- Orcina, Ltd. Available online: https://www.orcina.com/orcaflex (accessed on 27 December 2023).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Unit | Value |
|---|---|---|
| Mass | 21,346 | |
| Center of gravity with respect to CoR (1) | (−0.89, 0, 1.017) | |
| Moment of inertia (pitch) with respect to CoR | 117,369 | |
| Depth of rotational axis | 1.60 | |
| Diameter of hole | 3.60 | |
| Radius of stern | 2.00 | |
| Width | 5.00 | |
| Undamped natural period (pitch) | 5.13 |
| Item | Unit | Value |
|---|---|---|
| Mass | 2,327,975 | |
| Vertical length of CoG (1) below SWL (2) | −1.87 | |
| Moment of inertia (roll) with respect to CoG | 5,433,070,351 | |
| Moment of inertia (pitch) with respect to CoG | 318,305,735 | |
| Moment of inertia (yaw) with respect to CoG | 5,708,240,092 | |
| Draft | 5.35 | |
| Diameter of pontoon | 2.70 | |
| Length of the central platform’s pontoon | m | 34.0 |
| Length of the wing platform’s pontoon | m | 68.0 |
| Undamped natural period (surge) | 50.00 | |
| Undamped natural period (heave) | 12.00 | |
| Undamped natural period (pitch) | 13.50 |
| Platform | Rotor | |||
|---|---|---|---|---|
| Degree of Freedom | Surge | Heave | Pitch | Pitch |
| Damping ratio ( | 0.0017 | 0.1539 | 0.0432 | 0.0906 |
| Scenario | Number of Rotors | Platform Type |
|---|---|---|
| Single rotor | 1 EA | Without platform |
| Case 1 | 4 EA | Without platform |
| Case 2 | 4 EA | Fixed platform |
| Case 3 | 4 EA | Floating platform |
| Coordinate System | Position with Respect to Global Coordinates [m] |
|---|---|
| Global | (0, 0, 0) |
| Single rotor | |
| Single rotor | (0, 0, 0) |
| Case 1 | |
| Outer rotor 1 | (0, −12.75, −1.6) |
| Inner rotor 1 | (0, −4.25, −1.6) |
| Inner rotor 2 | (0, 4.25, −1.6) |
| Outer rotor 2 | (0, 12.75, −1.6) |
| Cases 2 and 3 | |
| Platform | (0, 0, 0) |
| Outer rotor 1 | (−20.321, −12.75, −1.6) |
| Inner rotor 1 | (−20.321, −4.25, −1.6) |
| Inner rotor 2 | (−20.321, 4.25, −1.6) |
| Outer rotor 2 | (−20.321, 12.75, −1.6) |
| Parameter | Unit | Value |
|---|---|---|
| Wave spectrum | - | JONSWAP |
| Significant wave height () | m | 2.0 |
| Peak period () | s | 6.65 |
| Peak enhancement factor () | - | 1.0 |
| Scenario | [kW] | Rate of Change [%] |
|---|---|---|
| Single rotor × 4EA | 47.2954 | - |
| Arrayed 4 rotors (case 1) | 48.1761 | +1.86 ↑ (1) |
| 4 rotors connected to fixed platform (case 2) | 49.3984 | +4.45 ↑ |
| 4 rotors connected to floating platform (case 3) | 61.3356 | +29.69 ↑ |
| Scenario | Outer Rotor | Inner Rotor | ||
|---|---|---|---|---|
| Mean [rad/s] | Rate of Change [%] | Mean [rad/s] | Rate of Change [%] | |
| Single rotor | 0.48 | - | 0.48 | - |
| Case 1 | 0.49 | +0.85 ↑ | 0.49 | +1.02 ↑ |
| Case 2 | 0.50 | +2.44 ↑ | 0.50 | +2.26 ↑ |
| Case 3 | 0.56 | +16.46 ↑ | 0.56 | +15.32 ↑ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Bae, Y.H. Multibody Analysis of Wave Energy Converters and a Floating Platform in the Time Domain. J. Mar. Sci. Eng. 2024, 12, 265. https://doi.org/10.3390/jmse12020265
Kim D, Bae YH. Multibody Analysis of Wave Energy Converters and a Floating Platform in the Time Domain. Journal of Marine Science and Engineering. 2024; 12(2):265. https://doi.org/10.3390/jmse12020265
Chicago/Turabian StyleKim, Dongeun, and Yoon Hyeok Bae. 2024. "Multibody Analysis of Wave Energy Converters and a Floating Platform in the Time Domain" Journal of Marine Science and Engineering 12, no. 2: 265. https://doi.org/10.3390/jmse12020265
APA StyleKim, D., & Bae, Y. H. (2024). Multibody Analysis of Wave Energy Converters and a Floating Platform in the Time Domain. Journal of Marine Science and Engineering, 12(2), 265. https://doi.org/10.3390/jmse12020265