
Analysis of Deep-Sea Acoustic Ranging Features for Enhancing Measurement Capabilities in the Study of the Marine Environment



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Background and Previous Experiments
1.1.1. The Main Features of the Sea of Japan
- An upper homogeneous layer with a thickness varying from 50 to 150 m throughout the year, exhibiting sound speed values exceeding 1490–1500 m/s.
- A transition layer characterized by large negative gradients (averaging 0.2–0.4 s−1), extending down to a depth of 300 m.
- A layer between 300–600 m where sound speed values (and gradients) are at their minimum.
- Below 600 m, there is a continual increase in sound speed values, primarily driven by rising hydrostatic pressure.
1.1.2. The Experiment Conducted in 2006 in the Sea of Japan
1.2. The Experiment Conducted in 2017 in the Sea of Japan
- -
- The impulse responses recorded in both insonified and shadow zones, consistent with theoretical predictions, displayed a similar magnitude-time profile characterized by two to three arrivals of acoustic energy. This indicates the existence of a shelf area along the acoustic energy propagation pathway that enhances the uniformity of insonification in the waveguide at depths beneath the USC axis.
- -
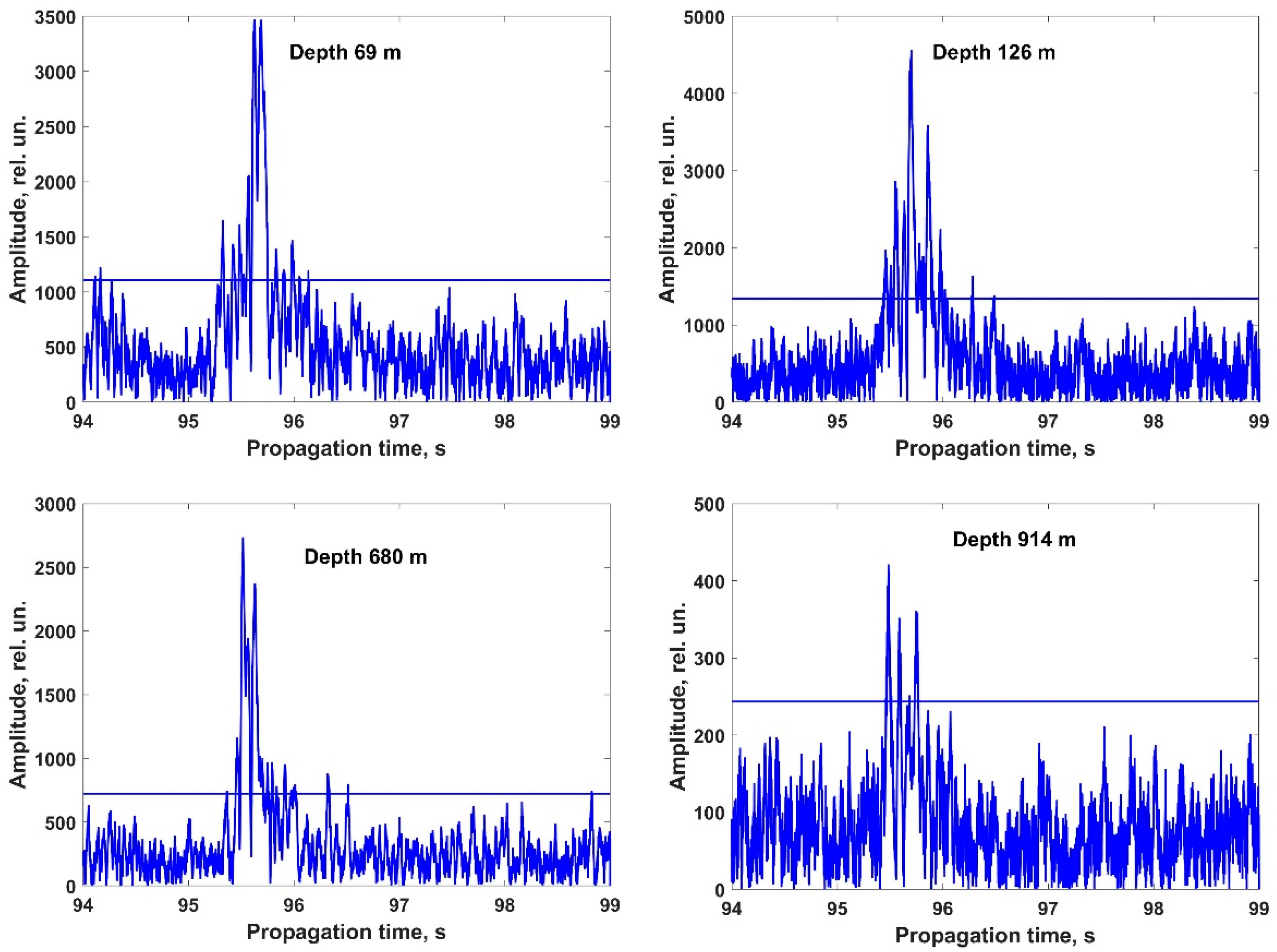
- The characteristics of the waveguide’s impulse responses changed considerably with depth. Close to the USC axis, predominately a single strong pulse is detected. However, at increased depths, up to three delayed impulses can be perceived, typically with delays ranging from 20 to 30 ms, and any of these impulses may reach maximal amplitude. Since the distances between the sound source and receivers are determined based on the arrival time of the pulse with the highest magnitude, this arrival pattern can result in distance estimation inaccuracies of about 40 to 60 m.
- -
- The effective velocities measured while receiving navigation signals and those computed using the proposed methodology at depths up to 500 m and distances of up to 200 km are closely aligned, differing by no more than 1 m/s from the speed of sound at the USC axis. It is noteworthy that effective velocities often necessitate correction due to the influence of the shelf area. However, in this study, such corrections were not required since the effective velocity measured in the shelf region (1456 m/s) matched the minimum group velocities.
2. Means and Methods
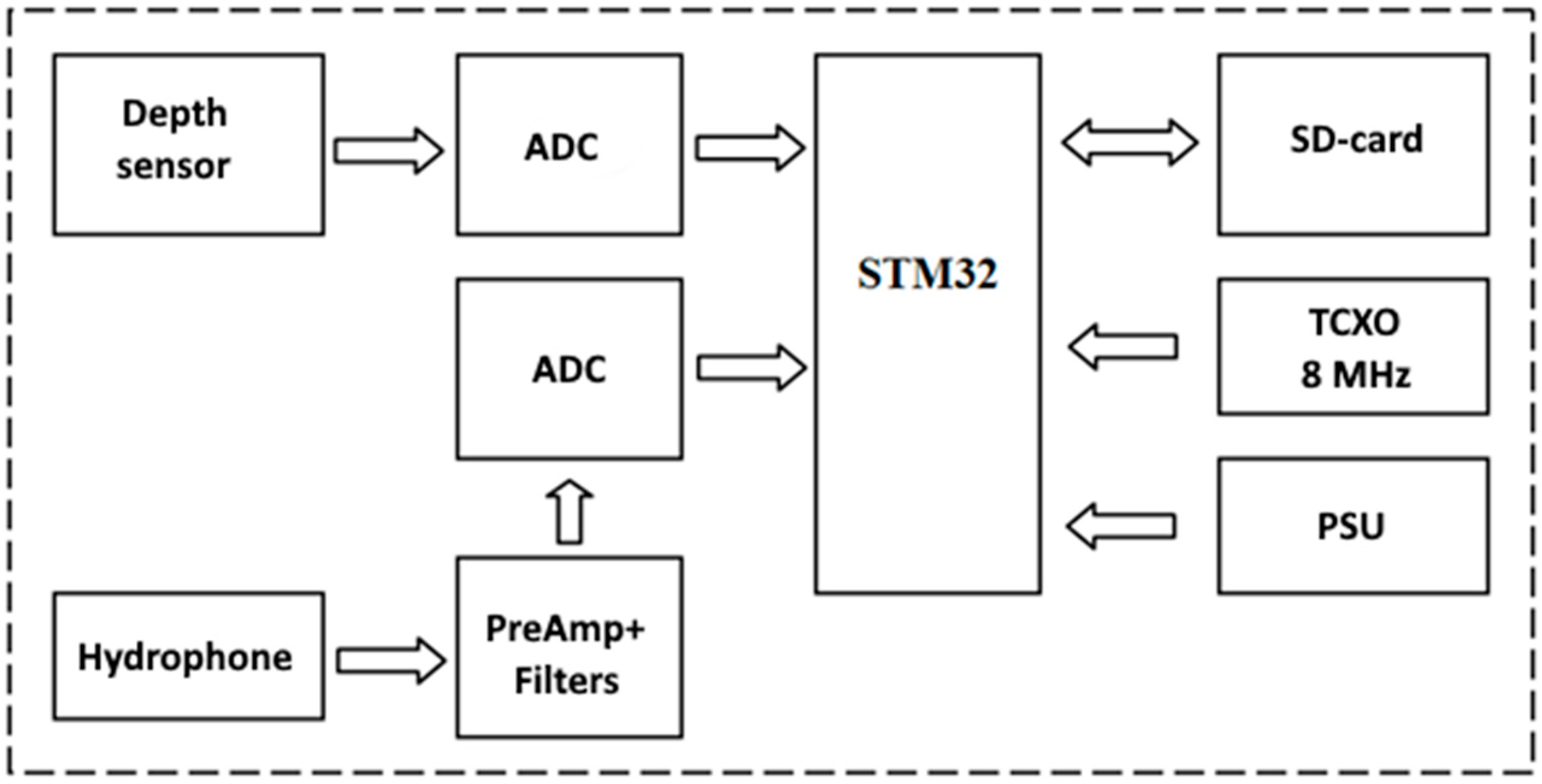
2.1. Deep-Sea Autonomous Measuring System
- -
- Dimensions of each autonomous hydrophone—350 × Ø75 mm;
- -
- Number of autonomous hydrophones—4 pcs.;
- -
- Weight of the assembled set of autonomous hydrophones in water—13.6 kg, in air—20.64 kg;
- -
- Sensitivity of hydrophones—160 μV/Pa;
- -
- ADC bit depth—16;
- -
- Format of stored data—Signed Integers 16;
- -
- Operating frequency band—40–12,000 Hz;
- -
- Sampling frequency—24 kHz;
- -
- Intrinsic noise of amplifiers—does not exceed 63 μV/√Hz;
- -
- Storage device type—SDHC card up to 32 GB;
- -
- Power supply autonomy—12 h;
- -
- Battery type—Li-Ion;
- -
- Autonomy by data storage capacity—(32 GB-7 days, 16 GB-3 days);
- -
- Depth sensor—strain gauge transducer D10-T (Microtenzor Company, Orel city, Russia);
- -
- Depth determination accuracy—±0.1 m;
- -
- Depth sensor sampling frequency—4 Hz.
- -
- ADC—16-bit analog-to-digital converter: acoustic channels—ADS8332, depth channel—ADS1110,
- -
- PSU—power supply unit (Li-Ion batteries of size 18,650),
- -
- STM32—STM32F103RC microcontroller,
- -
- Depth sensor—D10-T strain gauge transducer,
- -
- TCXO—8 MHz temperature-compensated generator.
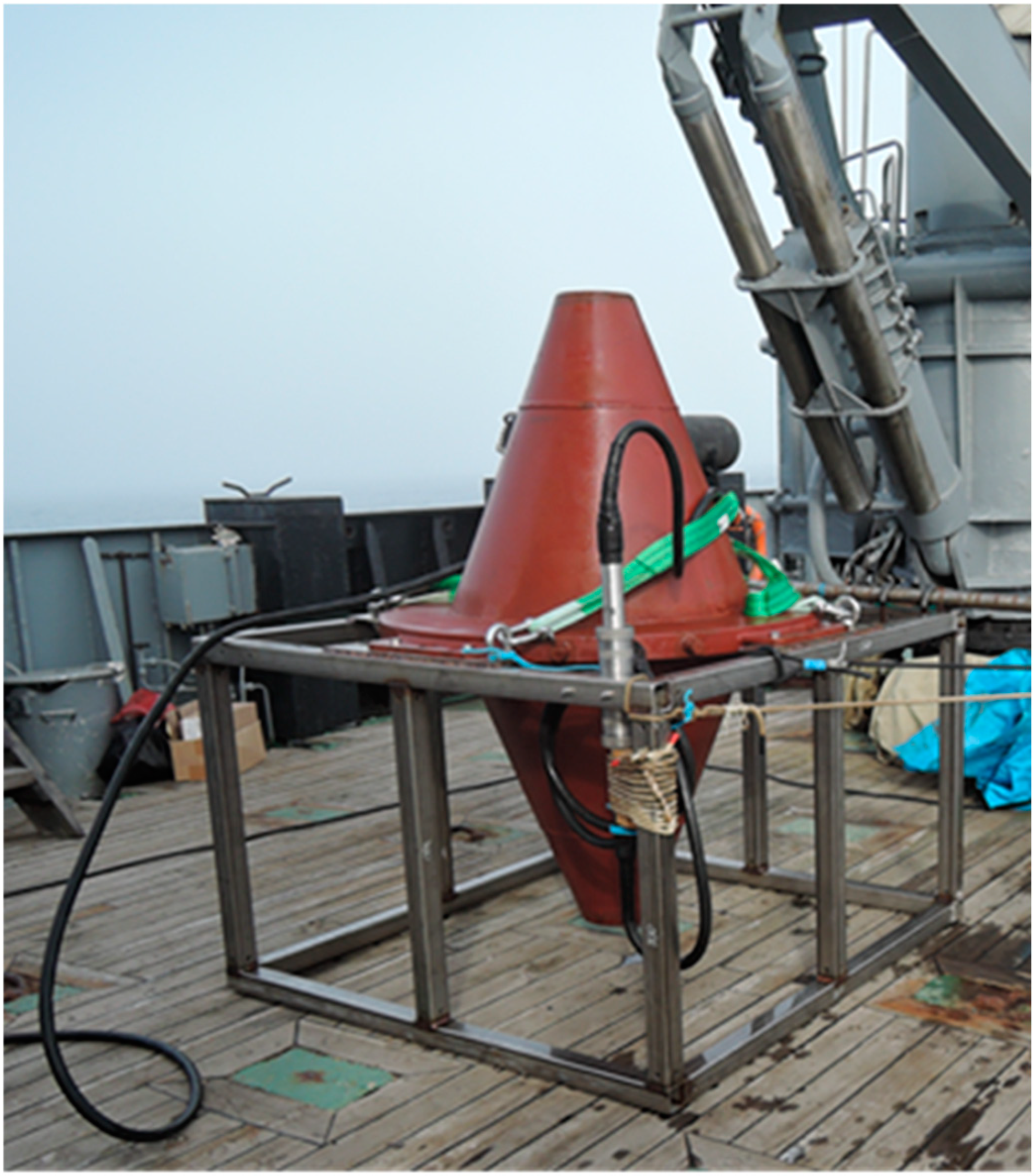
2.2. High Power Low Frequency Acoustic Source
- -
- Using a transducer without compensating for external hydrostatic pressure, since the maximum operating depth of the emitter is determined by the yield strength of the materials used and the mechanical stresses that arise in the structure when exposed to hydrostatic pressure;
- -
- The possibility of significantly increasing the effective area of the radiating surface relative to the cross-sectional area of the active element, using the developed surface of the emitter body;
- -
- Combining the functions of the radiating aperture and the supporting structure for the elastic elements performing the preliminary stress of the active piezoceramic element by the emitter body.
2.3. Experiment Conditions
3. Results
4. Discussion
5. Conclusions
- The results obtained are of both fundamental and practical significance for tackling the challenges of positioning and control associated with DSAMS during missions that occur at considerable distances of hundreds of kilometers from SNS and at depths reaching up to 1000 m. The experiment detailed in this article represents a technical and methodological extension of the study outlined in Section 1.2, yet it was conducted under markedly different climatic conditions resulting from the aftermath of a strong typhoon in the surveyed region. This extension greatly improves the potential for advancing both theory and practical approaches to these challenges.
- This study highlighted practical considerations related to the formation of the impulse response in the waveguide following the impact of the powerful typhoon that affected the surveyed waters. The absence of a near-bottom sound channel on the shelf, which typically develops during summer due to water mixing, resulted in the impulse characteristics of the waveguide at all depths manifesting as a series of pulses lasting 0.5 s, with the peak amplitude pulse situated nearer to the center. Additionally, it was observed that the times and effective propagation speeds of maximum pulses remained roughly constant across all depths, illustrating their practical utility in addressing positioning issues for underwater robotic units operating at depths up to 1000 m.
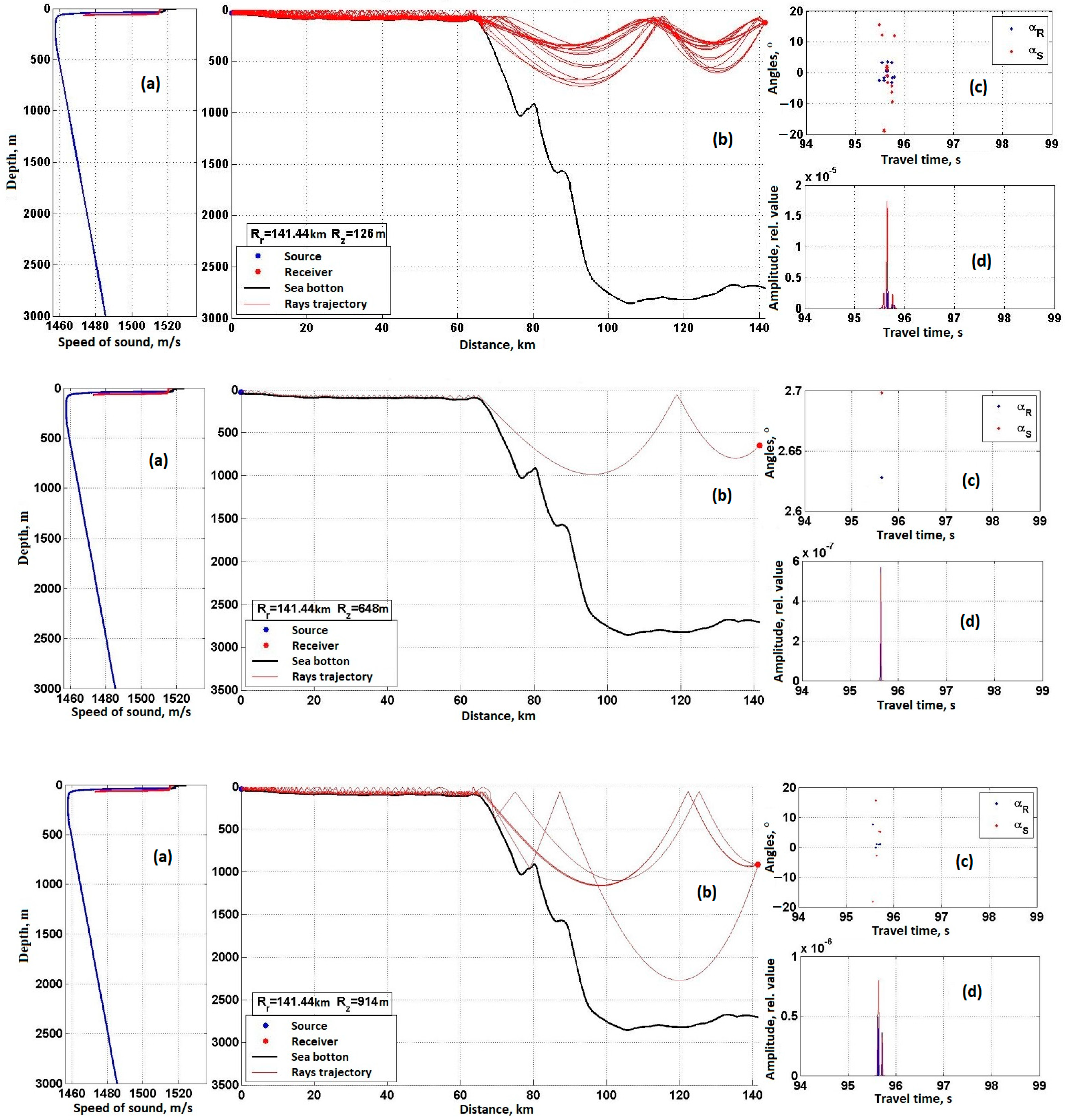
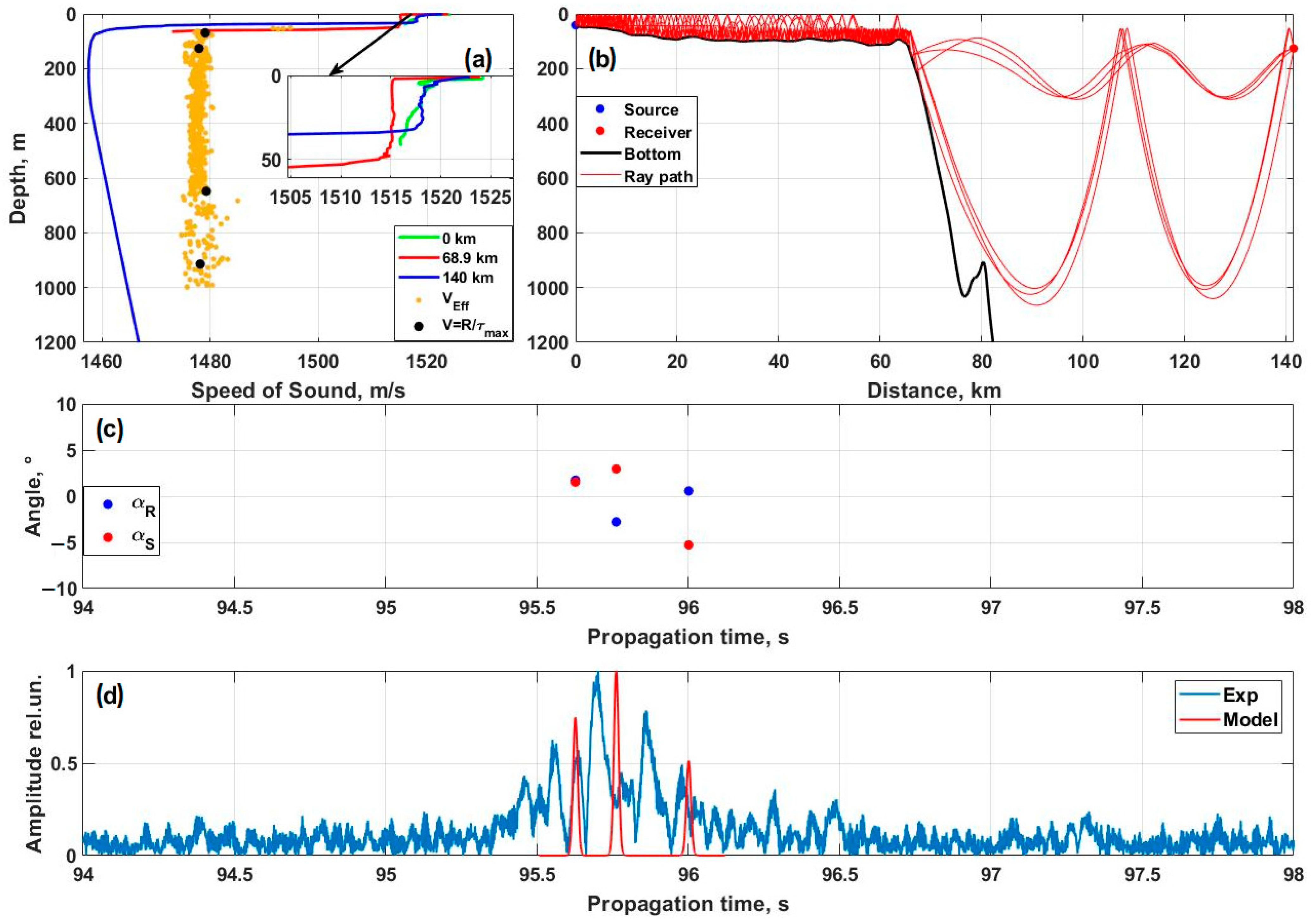
- Numerical modeling conducted with the RAY program, based on ray approximation, demonstrated that the calculated effective velocities for each horizon closely matched the experimentally observed effective velocities, achieving an accuracy of about 1 m/s for a depth of 600 m and 0.1 m/s for other depths. Importantly, numerical evidence confirmed the expansion of the waveguide impulse response to 0.5 s and identified the presence of a peak arrival in the center, which was also observed in the experiments. This finding indicates the potential for using the RAY program to model and analyze the physical processes of acoustic wave propagation in complex hydrological and bathymetric environments.
- The distinctive and practically valuable experimental and theoretical outcomes derived from acoustic range-finding measurements conducted over various years—simulating real maneuvering scenarios of multiple underwater robots at depths of up to 1000 m and hundreds of kilometers from control stations—underscore the need for further extensive research. Such investigations should leverage advanced technologies and theoretical modeling methods.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Correction Statement
References
- Li, P.; Wang, D.; Wang, L.; Lu, H. Deep visual tracking: Review and experimental comparison. Pattern Recognit. 2018, 76, 323–338. [Google Scholar] [CrossRef]
- Badiey, M.; Katsnelson, B.G.; Lynch, J.F.; Pereselkov, S.; Siegmann, W.L. Measurement and modeling of three-dimensional sound intensity variations due to shallow-water internal waves. J. Acoust. Soc. Am. 2005, 117, 613–625. [Google Scholar] [CrossRef] [PubMed]
- ATOC Consortium. Ocean climate change: Comparison of acoustic tomography, satellite altimetry, and modeling. Science 1998, 281, 1327–1332. [Google Scholar] [CrossRef] [PubMed]
- Camus, L. Autonomous Surface and Underwater Vehicles as Effective Ecosystem Monitoring and Research Platforms in the Arctic–The Glider Project. Sensors 2021, 21, 6752. [Google Scholar] [CrossRef]
- Wolfson, M.A.; Spiesberger, J.L.; Tappert, F.D. Internal wave effects on long-range ocean acoustic tomography. J. Acoust. Soc. Am. 1995, 97, 3235. [Google Scholar] [CrossRef]
- Martin, B. An Analysis of Current and Future Technology for Unmanned Maritime Vehicles; RAND Corporation: Santa Monica, CA, USA, 2019. [Google Scholar]
- Worcester, P.F.; Cornuelle, B.D.; Dzieciuch, M.A.; Munk, W.H.; Howe, B.M.; Mercer, J.A.; Spindel, R.C.; Metzger, K.; Birdsall, T.G. A test of basin-scale acoustic thermometry using a large-aperture vertical array at 3250-km range in the eastern North Pacific Ocean. J. Acoust. Soc. Am. 1999, 105, 3185–3201. [Google Scholar] [CrossRef]
- Baggeroer, A.B.; Sperry, B.; Lashkari, K.; Chiu, C.-S.; Miller, J.H.; Mikhalevsky, P.N.; von der Heydt, K. Vertical array receptions of the Heard Island transmissions. J. Acoust. Soc. Am. 1994, 96, 2395–2413. [Google Scholar] [CrossRef]
- Cornuelle, B.D.; Worcester, P.F.; Hildebrand, J.A.; Hodgkiss, W.S., Jr.; Duda, T.F.; Boyd, J.; Howe, B.M.; Mercer, J.A.; Spindel, R.C. Ocean acoustic tomography at 1000-km range using wave fronts measured with a large-aperture vertical array. J. Geophys. Res. 1993, 98, 16365–16377. [Google Scholar] [CrossRef]
- Galkin, O.P.; Pankova, S.D. Correlation characteristics and travel time differences for hydroacoustic signals under directional reception at different depths. Acust. Zhurnal 2003, 49, 481–488. [Google Scholar] [CrossRef]
- Vadov, R.A. Long-range sound propagation in the norwegian sea. Acoust. Phys. 2002, 48, 24–33. [Google Scholar] [CrossRef]
- Vadov, R.A. Long-range sound propagation in the central region of the Baltic Sea. Acoust. Phys. 2001, 47, 150–159. [Google Scholar] [CrossRef]
- Vadov, R.A. Long-range sound propagation in the northwestern region of the Pacific Ocean. Acoust. Phys. 2006, 52, 377–391. [Google Scholar] [CrossRef]
- Vadov, R.A. Long-range sound propagation in the northeastern Atlantic. Acoust. Phys. 2005, 51, 629–637. [Google Scholar] [CrossRef]
- Vadov, R.A. Long-range sound propagation in the shallow-water part of the Sea of Okhotsk. Acoust. Phys. 2002, 48, 142–146. [Google Scholar] [CrossRef]
- Vadov, R.A. Peculiarities in the formation of the sound field structure of a point source in the Black Sea underwater sound channel. Acoust. Phys. 2011, 57, 642–651. [Google Scholar] [CrossRef]
- Vadov, R.A. Some features of the formation of sound fields in the Kamchatka region of the Pacific Ocean. Akust. Zhurnal 2002, 48, 751–759. [Google Scholar] [CrossRef]
- Vadov, R.A. Some results of studies of long-distance sound propagation in the Greenland Sea. Akust. Zhurnal 2000, 46, 47–59. [Google Scholar]
- Vadov, R.A. Point source field in an underwater sound channel in the Sea of Japan. Akust. Zhurnal 1998, 44, 601–609. [Google Scholar]
- Worcester, P.F.; Dzieciuch, M.A.; Mercer, J.A.; Andrew, R.K.; Dushaw, B.D.; Baggeroer, A.B.; Heaney, K.D.; D’Spain, G.L.; Colosi, J.A.; Stephen, R.A.; et al. The North Pacific Acoustic Laboratory deep-water acoustic propagation experiments in the Philippine Sea. J. Acoust. Soc. Am. 2013, 134, 3359–3375. [Google Scholar] [CrossRef]
- Graupe, C.; Van Uffelen, L.; Worcester, P.F.; Dzieciuch, M.A.; Howe, B.M. An automated framework for long-range acoustic positioning of autonomous underwater vehicles. J. Acoust. Soc. Am. 2022, 152, 1615–1627. [Google Scholar] [CrossRef]
- Mikhalevsky, P.; Sperry, B.J.; Woolfe, K.F.; Dzieciuch, M.A.; Worcester, P.F. Deep ocean long range underwater navigation with ocean circulation model corrections. J. Acoust. Soc. Am. 2023, 154, 548–559. [Google Scholar] [CrossRef]
- Chang, K.I.; Zhang, C.I.; Park, C.; Kang, D.J.; Ju, S.J.; Lee, S.H.; Wimbush, M. (Eds.) Oceanography of the East Sea (Japan Sea); Springer International Publishing: Cham, Switzerland, 2016; 460p. [Google Scholar]
- Britenkov, A.K.; Farfel, V.A.; Bogolyubov, B.N. Comparison and analysis of electroacoustic characteristics of high power density compact low frequency hydroacoustic transducers. Appl. Phys. 2021, 3, 72–77. [Google Scholar] [CrossRef]
- Rimsky-Korsakov, A.V.; Yamshchikov, V.S.; Zhulin, V.I.; Rekhtman, V.I. Akusticheskie Podvodnye Nizkochastotnye Izluchateli–L.; Sudostroenie: St. Petersburg, Russia, 1984; 184p. [Google Scholar]
- Bogorodskij, V.V.; Zubarev, L.A.; Korepin, E.A.; Yakushev, V.I. Podvodnye Elektroakusticheskie Preobrazovateli–L.; Sudostroenie: St. Petersburg, Russia, 1983; 248p. [Google Scholar]
- Boden, L.; Bowlin, J.B.; Spiesberger, J.L. Time domain analysis of normal mode, parabolic, and ray solutions of the wave equation. J. Acoust. Soc. Am. 1991, 90, 954–958. [Google Scholar] [CrossRef]
- Bowlin, J.B.; Spiesberger, J.L.; Duda, T.F.; Freitag, L.E. Ocean Acoustical Ray-Tracing Software RAY; Woods Hole Oceano-Graphic Technical Report; WHOI-93-10; Woods Hole Oceanographic Institution: Woods Hole, MA, USA, 1993. [Google Scholar]
- Morgunov, Y.N.; Bezotvetnykh, V.V.; Burenin, A.V.; Voitenko, E.A. Study of how hydrological conditions affect the propagation of pseudorandom signals from the shelf in deep water. Acoust. Phys. 2016, 62, 350–356. [Google Scholar] [CrossRef]
- Morgunov, Y.N.; Bezotvetnykh, V.V.; Golov, A.A.; Burenin, A.V.; Lebedev, M.S.; Petrov, P.S. Experimental study of the impulse response function variability of underwater sound channel in the Sea of Japan using pseudorandom sequences and its application to long-range acoustic navigation. Acoust. Phys. 2021, 67, 287–292. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dolgikh, G.; Morgunov, Y.; Golov, A.; Burenin, A.; Shkramada, S. Analysis of Deep-Sea Acoustic Ranging Features for Enhancing Measurement Capabilities in the Study of the Marine Environment. J. Mar. Sci. Eng. 2024, 12, 2365. https://doi.org/10.3390/jmse12122365
Dolgikh G, Morgunov Y, Golov A, Burenin A, Shkramada S. Analysis of Deep-Sea Acoustic Ranging Features for Enhancing Measurement Capabilities in the Study of the Marine Environment. Journal of Marine Science and Engineering. 2024; 12(12):2365. https://doi.org/10.3390/jmse12122365
Chicago/Turabian StyleDolgikh, Grigory, Yuri Morgunov, Aleksandr Golov, Aleksandr Burenin, and Sergey Shkramada. 2024. "Analysis of Deep-Sea Acoustic Ranging Features for Enhancing Measurement Capabilities in the Study of the Marine Environment" Journal of Marine Science and Engineering 12, no. 12: 2365. https://doi.org/10.3390/jmse12122365
APA StyleDolgikh, G., Morgunov, Y., Golov, A., Burenin, A., & Shkramada, S. (2024). Analysis of Deep-Sea Acoustic Ranging Features for Enhancing Measurement Capabilities in the Study of the Marine Environment. Journal of Marine Science and Engineering, 12(12), 2365. https://doi.org/10.3390/jmse12122365