1. Introduction
It is well known that the underwater acoustic channel is one of the most intricate wireless communication channels, particularly under conditions of low signal-to-noise ratio (SNR) and pronounced Doppler effects. In order to address the challenges posed by low SNR and to achieve robust underwater acoustic communication, extensive research efforts have been undertaken [
1,
2,
3,
4]. Among the various underwater acoustic communication technologies, Direct Sequence Spread Spectrum (DSSS) is a commonly employed communication technique due to its exceptional interference resistance and robustness against channel fading. DSSS expands the signal over a broader frequency band by utilizing noise-like pseudo-random spreading codes (SCs), enabling coherent demodulation systems to recover the signal through coherent despreading of energy [
5]. Generally, the spreading gain is substantial (for instance, when the SC length is 511, the spreading gain reaches 27 dB) [
6]. This gain facilitates the accurate decoding of received signals under noisy conditions while also providing a degree of confidentiality. However, the communication rate of DSSS is constrained by the narrow bandwidth of the underwater acoustic channel, resulting in a relatively low transmission speed [
7,
8]. Furthermore, due to the time-varying nature of the marine environment, the Doppler shift within a single frame often exhibits variability, with longer transmission packets facing even more pronounced Doppler shifts. The time-varying Doppler shift can induce rapid fluctuations in the carrier phase, significantly diminishing the spreading gain during the coherent despreading process. In the context of time-varying Doppler shifts, the robustness of underwater spread spectrum communication is considerably compromised. Therefore, enhancing the communication rate of underwater spread spectrum communication and mitigating time-varying Doppler shifts are two critical research focal points in this field.
To enhance the communication rate of spread spectrum communication, a Code Index Modulation-Spread Spectrum (CIM-SS) scheme has been proposed in the realm of terrestrial radio communication [
9]. By introducing the spreading code domain and employing a new dimension to map information bits, the data rate is enhanced. This scheme preserves the advantages of spread spectrum modulation without increasing the system’s computational complexity and is easy to implement. The study in [
10] extended the CIM technology. Simulation results indicate that, compared to traditional DSSS systems, the proposed modulation scheme exhibits superior performance in terms of data rate, energy consumption, and complexity.
To address the time-varying Doppler effect, which induces rapid carrier phase shifts and reduces spreading gain, Doppler estimation and compensation are generally required. In previous studies, the methods for Doppler estimation can be categorized as follows: (1) utilizing adjacent pseudo-random codes for time-domain correlation to compute Doppler factors; (2) employing Doppler-sensitive training sequences to conduct time-frequency two-dimensional search methods; (3) utilizing LFM signals to perform block estimation methods; (4) combining coding techniques with iterative estimation algorithms. Among these, the method of using adjacent pseudo-random codes for time-domain correlation to estimate Doppler factors can obtain Doppler estimates between adjacent symbols, but it requires adjacent symbols to have the same pseudo-random code, making it applicable only to DSSS processing with relatively low spectral efficiency [
7,
11]. Hu et al. designed an M-ary sequence spread spectrum (M-SS) communication method that incorporates several identical pseudo-random codes into the frame structure for Doppler estimation. Although it sacrifices some communication rate, the accuracy of Doppler estimation is significantly improved [
12,
13]. The block estimation method using LFM signals can only calculate the average Doppler within a single frame and is not suitable for long frame sequences [
14]. Furthermore, coding iterative techniques require a high signal-to-noise ratio, rendering them unsuitable for underwater acoustic communication under low SNR ratio conditions [
15,
16]. L. Freitag et al. proposed a receiver based on the Minimum Mean Square Error (MMSE) criterion for the acquisition of Direct Sequence Spread Spectrum (DSSS) signals. The core method involves using an adaptive Decision Feedback Equalizer (DFE) in combination with spreading codes for synchronization and tracking. This approach is particularly suitable for complex multipath propagation environments in multi-user underwater acoustic communications [
17]. J. Neasham et al. analyzed the sea trial results of the Phorcys V0 underwater acoustic communication waveform, validating its performance across multiple frequency bands and complex channel environments, and evaluated the performance of different receiver structures [
18]. Kwang B. Yoo et al. proposed a method based on the measurement and updating of passive matched filters to enhance spreading gain by mitigating variable multipath effects and performing Doppler estimation within symbols; however, the calculation speed and efficiency of Doppler estimation significantly decreased under low SNR ratios [
5]. Sun et al. introduced a novel linear prediction equation suitable for sparse underwater acoustic channels, calculating linear prediction coefficients by estimating the Doppler frequency shift for each symbol. However, the computational load and prediction accuracy are significantly influenced by the signal-to-noise ratio, and the algorithm exhibits high complexity [
19]. Due to the relatively low speed of sound in the ocean, even minor velocity changes in underwater platforms can induce substantial Doppler frequency shifts. Methods for Doppler estimation in underwater acoustic communication primarily involve estimating and predicting the velocity of movement, which entails significant computational load and complexity. When there are deviations in velocity estimation, the Doppler estimation is also significantly affected and constrained by the accuracy of the estimation. During the process of Doppler compensation, it is common to perform a search within a certain range of the Doppler estimation results before updating them into the matched filter bank, a process referred to as Doppler precise estimation. Thus, even if there is a certain deviation in Doppler estimation, it will not significantly impact the spreading gain; the permissible range of deviation in Doppler estimation is referred to as Doppler-tolerant [
16].
Influenced by the studies in [
9,
10], this research introduces the CIM-SS technology from the field of radio communication into the realm of underwater acoustic communication, innovatively designing an M-SS communication transmission module based on polarity and spreading code index modulation, which partitions the transmitted information into polarity data and index data for separate modulation, achieving a transmission rate that is
times higher than that of a DSSS communication system transmission module with the same signal length, where M denotes the size of the spreading code index library and n represents the number of transmitted symbols, thereby further enhancing spectral efficiency.
In response to the issue of carrier frequency offset (CFO) caused by time-varying Doppler frequency shifts in complex channel environments, this paper focuses on enhancing Doppler-tolerant, traditional methods typically involve conducting a search within a certain range of the Doppler estimation results, followed by performing correlation-matched filtering based on the various search values and selecting the search position corresponding to the highest output peak as the final Doppler estimation result. This method is feasible for DSSS, but it introduces certain errors in the final estimation results when applied to M-SS communication, as the process of M-SS despreading requires not only inputting the signal into the Doppler precise estimator but also into the spreading code index library, resulting in a two-dimensional correlation peak matrix composed of the search frequency shift dimension and the spreading code index dimension. Previous studies typically assumed that the frequency shift position corresponding to the highest peak in the matrix should be selected as the Doppler estimation result, but this approach is not rigorous for M-SS communication, as the correlation between spreading codes has been disrupted under conditions of pronounced channel time variability, and at the searched frequency shift positions, it is possible for peaks at positions with larger errors to exceed those at positions with smaller errors. Although the corresponding index decoding position may be correct, the accumulation of errors can still lead to subsequent decoding inaccuracies.
To address the aforementioned issues, we propose a method for updating matched filters based on correlation cost factors for M-SS communication. By calculating the correlation cost factors, the accuracy of Doppler estimation for each symbol can be assessed, which allows for guiding the direction of Doppler estimation for subsequent symbols in subsequent processing, thereby preventing excessive accumulation of estimation errors. Through simulations and sea trials, the reception method utilizing correlation cost factor-based updates to matched filters significantly outperforms traditional reception methods in various aspects.
The remainder of this paper is organized as follows.
Section 2 describes the newly proposed M-ary spread spectrum communication transmission module, the conventional reception method for M-SS, and the theoretical aspects of the reception method based on correlation cost factor updates to matched filters;
Section 3 presents numerical simulation studies, including parameter settings and decoding performance tests under various mobility conditions;
Section 4 analyzes data from sea trial experiments;
Section 5 provides a summary of the entire paper.
3. Numerical Simulation Analysis
To ensure that the simulation closely resembles a real-world environment, the received signal in the simulation process is obtained from WATERMARK [
31]. It is noteworthy that WATERMARK reproduces maritime conditions, including hardware effects, and thus, the simulated data are influenced by the small Doppler shifts generated (instantaneous Doppler spreading and time-varying Doppler shifts around the mean) The reception methods discussed in this paper (including the traditional methods used for comparison) primarily focus on addressing the large-scale Doppler shifts caused by the active motion of the vessel. Therefore, the small-scale Doppler effects introduced by WATERMARK mentioned above, do not significantly impact the simulation. In the shallow underwater acoustic channel measured by WATERMARK, we selected the KAU1 and KAU2 channels as the simulation channels, which are the SIMO channels from the Kauai Acomms MURI 2011 (KAM11) experiment. This experiment was conducted from 23 June to 12 July 2011 in the shallow waters off the west side of Kauai, Hawaii. The KAU1 channel was recorded in the frequency range of 4 to 8 kHz, located between the towed source and a vertical suspended array of 16 receivers. The duration of the run was 33 s. We only processed the data received by the first channel receiver, where Data Channel 1 is a seabed hydrophone located 9 m above the seafloor, at a depth of approximately 106 m. KAU2 is another SIMO channel from the KAM11 experiment, which involves the same signal transmission as KAU1, but is recorded on a different array. The main difference from KAU1 is that it has a greater range and a faster rate of attenuation for delayed arrivals. The time-varying channel impulse response (TVCIR) of these channels (see
Figure 4). It is evident that the multipath effects of the channel are pronounced, and both channels exhibit time-varying Doppler (TVD) shifts due to the motion of the towing vessel, with relative motion speeds of −1.14 m/s and 1.28 m/s, respectively.
During the simulation process, the parameters of the transmitted signal are shown in
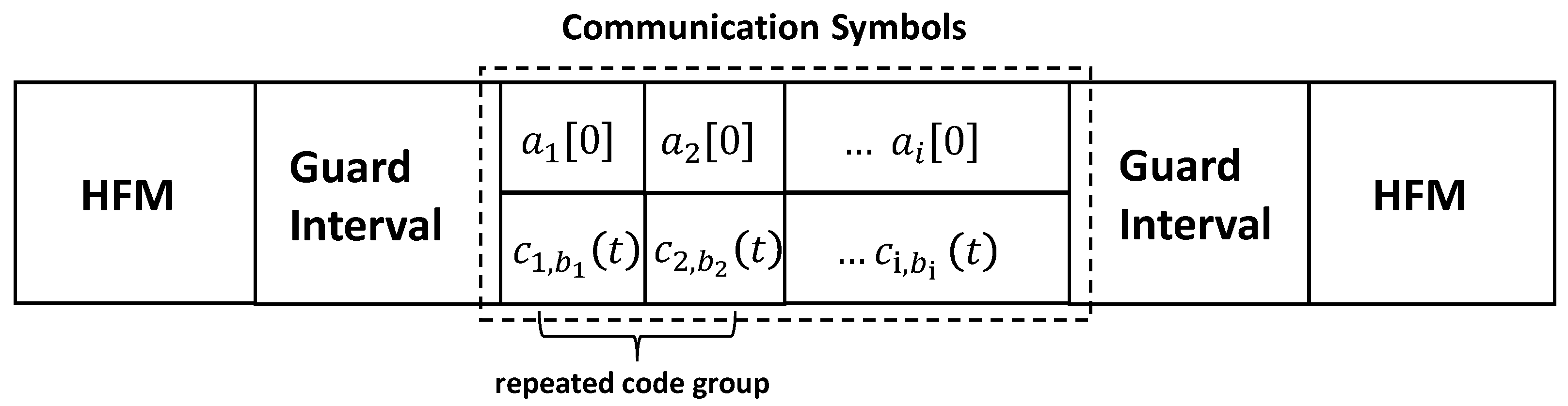
Table 1, with the length of the original bit stream being 750 bits. The original bit stream is input into the transmitter structure illustrated in
Figure 1, resulting in a total of 150 spread spectrum symbols carrying polar modulation, with the output data organized into frames of 50 symbols each, yielding a total of three frames. Regarding the carrier parameters, the center frequency is set to 6 kHz with a bandwidth of 4 kHz. The spreading code for the information sequence is a chaotic spreading code with a length of 511, operating at a rate of 4 kcps. During the simulation process, we incorporated three additional reception methods for comparison: 1. the conventional M-ary spread spectrum reception method without Doppler estimation (WDE-MSS); 2. the conventional M-ary spread spectrum reception method with coarse Doppler estimation (CDE-MSS); 3. the conventional M-ary spread spectrum reception method with fine Doppler estimation (FDE-MSS).
3.1. Constant Velocity Motion (CV)
First, we evaluate the performance of CCF-MSS under constant velocity conditions. Given that the channel inherently exhibits time-varying Doppler (TVD) shifts, we directly add noise to the received signal to simulate the communication process under constant velocity conditions.
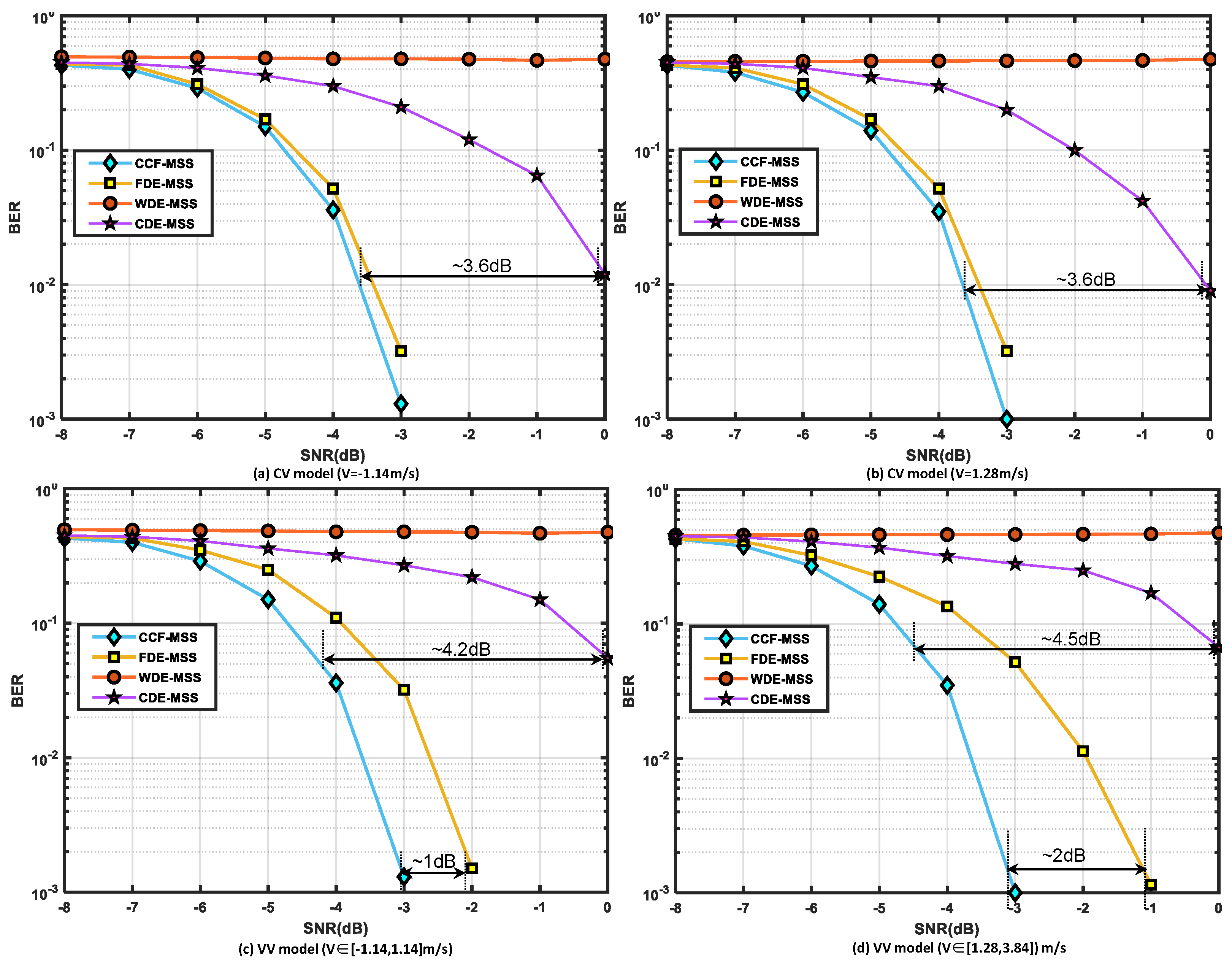
Figure 5a,b illustrates the BER curves for different reception methods under constant velocity conditions.
It is evident that under the conditions of speeds of −1.14 m/s and 1.28 m/s, CCF-MSS exhibits the best performance, followed closely by FDE-MSS, though the decoding performance of the two methods shows only a slight difference. When the BER curve converges to the performance loss of CDE-MSS compared to CCF-MSS is approximately 3.6 dB, while the performance of WDE-MSS, which does not employ Doppler estimation, is the poorest. Based on the simulation results, it is evident that CCF-MSS exhibits slightly better noise and Doppler resistance under constant velocity motion compared to FDE-MSS, and significantly outperforms CDE-MSS while demonstrating a clear superiority over WDE-MSS. This indicates that under conditions of large-scale relative motion, Doppler estimation and compensation are effective methods for mitigating the decline in spreading code correlation caused by frequency shifts.
3.2. Variable Velocity Motion (VV)
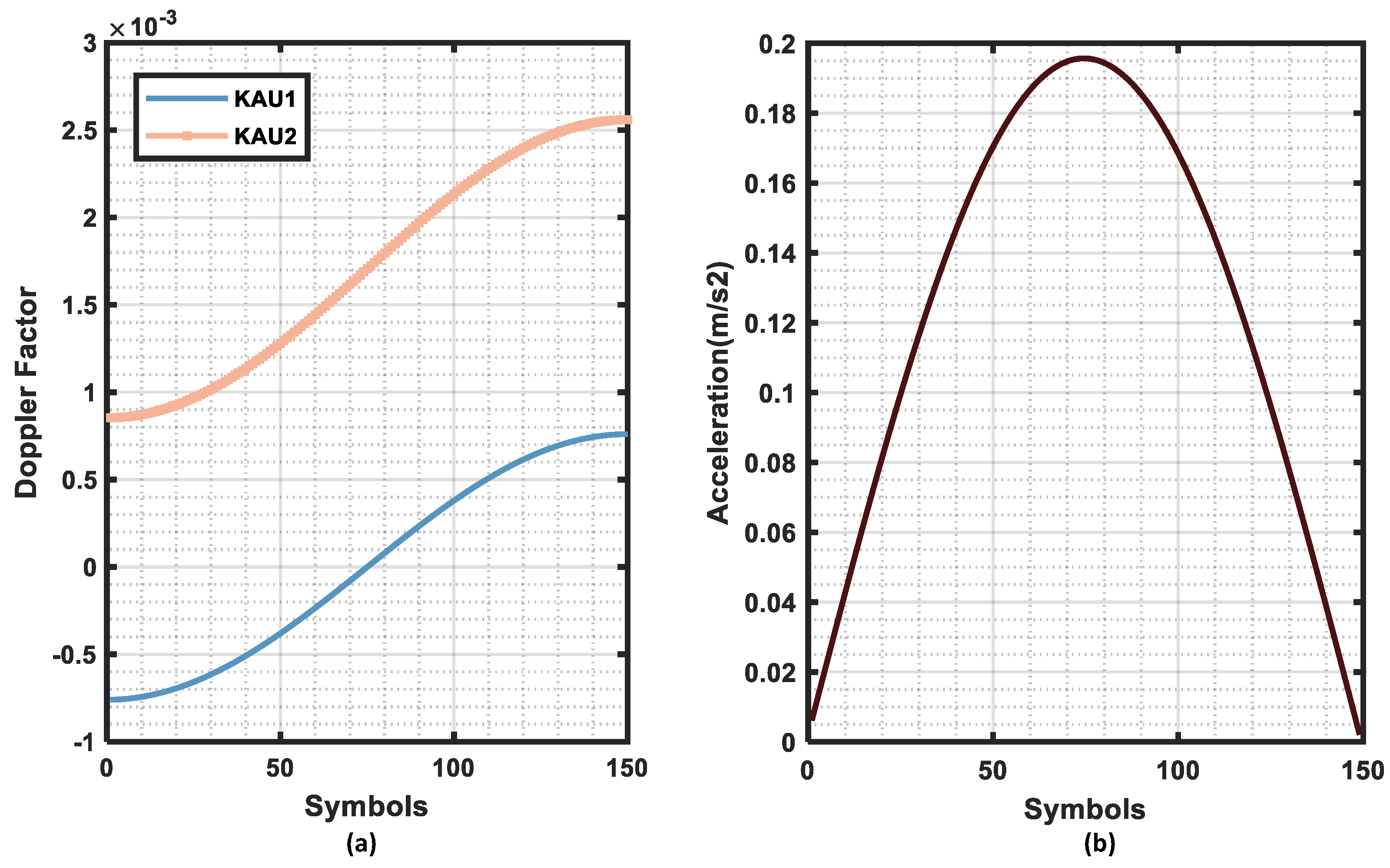
To better align with the communication process under actual underwater complex motion, we incorporated variable velocity motion conditions into the simulation, during which the Doppler factor varies within the duration of the signal, as shown in
Figure 6a, while
Figure 6b illustrates the variations in acceleration of the relative motion between the transmitter and receiver. The Doppler factor
for the
i-th symbol is given by the following:
Here,
n denotes the number of symbols in the transmitted signal,
c represents the speed of sound, and
denotes the initial velocity.
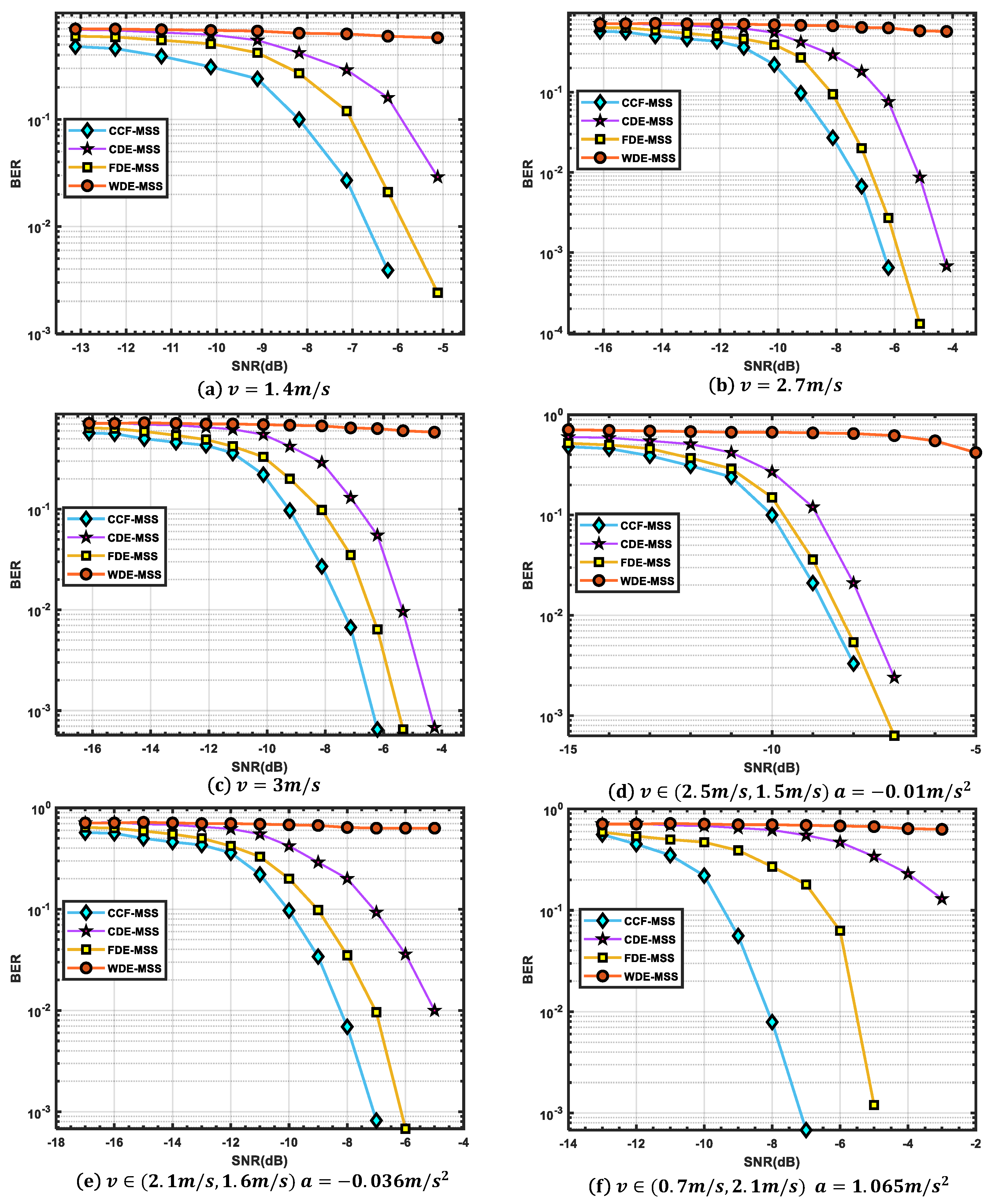
Figure 5c,d presents the BER curves for variable speed motion under two simulated channels, and it is evident that CCF-MSS outperforms the other methods significantly. When the speed varies in the low-speed range
m/s, 1.14 m/s), when the BER curve converges to
, the performance loss of FDE-MSS compared to CCF-MSS is approximately 1 dB. When the speed varies in the high-speed range (1.28 m/s, 3.84 m/s) when the BER curve converges to
, the performance loss of FDE-MSS compared to CCF-MSS is approximately 2 dB. The simulation results under variable speed motion conditions demonstrate that CCF-MSS exhibits superior resilience to speed variations compared to FDE-MSS, and when acceleration is constant while speed varies over a larger range, the performance gap becomes even more pronounced.
3.3. Doppler Tolerance
After analyzing the simulation results, it is evident that CCF-MSS significantly outperforms the other three traditional reception methods under time-varying channel conditions. Moreover, the coarse Doppler estimation steps for CCF-MSS, CDE-MSS, and FDE-MSS are entirely identical, while the subsequent decoding performance indicates that there are differences in tolerance to Doppler estimation errors among the three methods.
4. Validation Through Sea Trials
The simulation results indicate that the proposed reception method can effectively handle Doppler shifts caused by various motion patterns. However, the actual motion states of the targets are not as ideal as those in the numerical simulations. Therefore, we validated the true performance of the proposed reception method through sea trials.
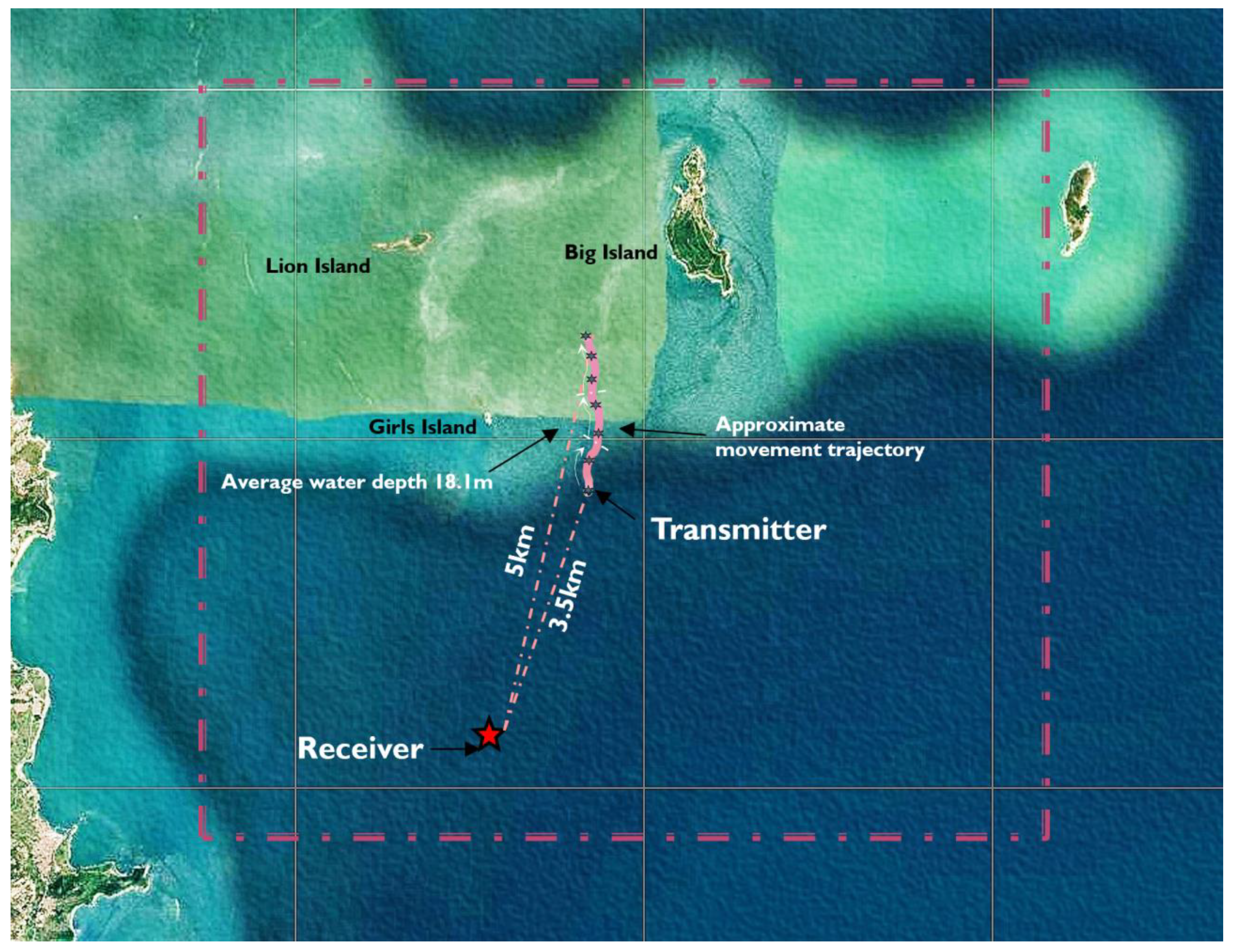
In March 2023, we conducted an underwater acoustic M-SS communication experiment in Laoshan Bay, China, with the experimental area location shown in
Figure 7. During the experiment, the receiving vessel was anchored while the transmitting vessel was in motion, and the speed and direction of its movement were determined and recorded by the BeiDou satellite positioning system (BDS). The radial velocity was calculated based on the latitude and longitude measurements of both the transmitting and receiving vessels, and due to the measurement errors inherent in the BDS and the fact that the receiving vessel was not strictly fixed, there is a certain systematic error in the derived radial velocity. Both the transmitter and receiver were deployed at a depth of 10 m underwater, with the transmitter’s depth being inversely proportional to the speed of the transmitting vessel; the actual receiving depth was influenced by the relative motion of background currents and their own platforms, resulting in certain time variability.
The average water depth in the sea trial area is 18.1 m, with a gentle slope between the signal receiver and the transmitting vessel (excluding nearby islands and surrounding waters), and the water depth varies little, characterized by a muddy seabed. On the day of the trial, the weather was clear, with temperatures ranging from 8 to 15 °C, a south wind of 3 to 4 on the Beaufort scale, and wave heights of less than 0.5 m.
The entire sea trial process is divided into three groups. The distance between the receiver and transmitter ranges up to 3.5 km, with a maximum distance of 5 km. There is a significant variation in SNR among the different groups, with a maximum difference of up to 3 dB. The parameters of the transmitter are presented in
Table 1. Similar to the aforementioned simulation process, we continue to use reception methods such as WDE-MSS, CDE-MSS, and FDE-MSS for comparison.
Table 2 presents the decoding results of the experimental data for each group. The average SNR of each frame signal is estimated using Equation (
23), as follows:
Here, represents the average power of the received signal during the duration of the communication signal, and denotes the average power of the noise signal during the communication gaps. To highlight the performance differences among the various reception methods, we first conduct a brief analysis of the sea trial data from each group and then select the portions of the sea trial data from each group that exhibit significant distortion for detailed analysis.
4.1. Processing and Analysis of the First Group of Sea Trial Data
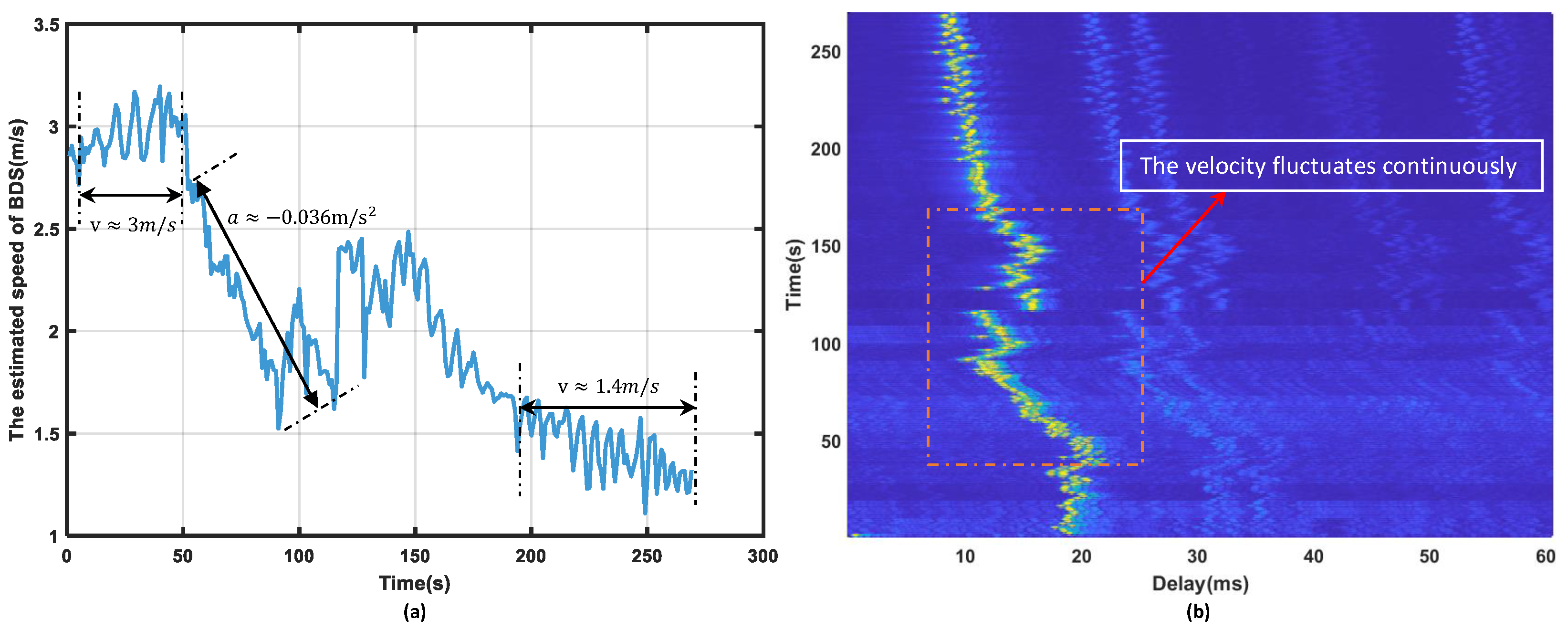
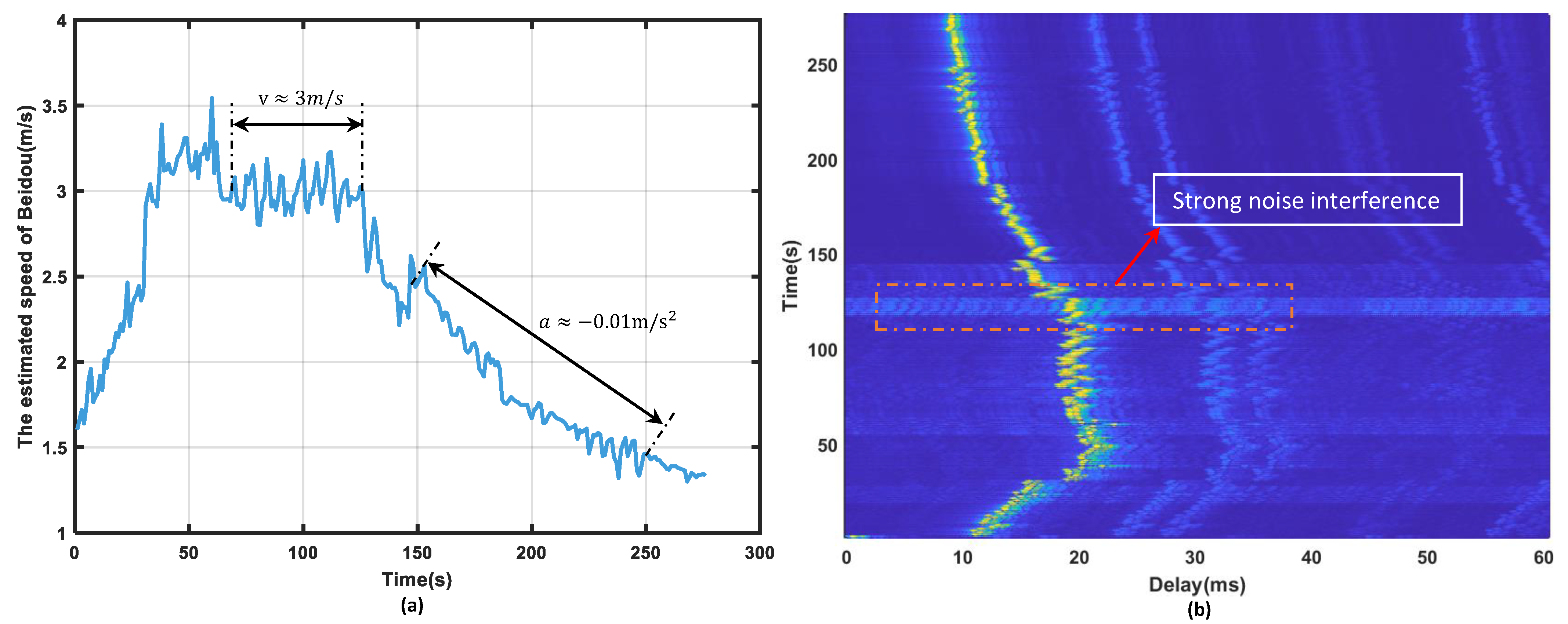
Figure 8a displays the speed recorded during the first sea trial process by the BDS, while
Figure 8b presents the results of the channel impulse response. It is evident that the channel exhibits significant multipath effects during the communication process, with complex background noise and frequent instantaneous noise occurrences.
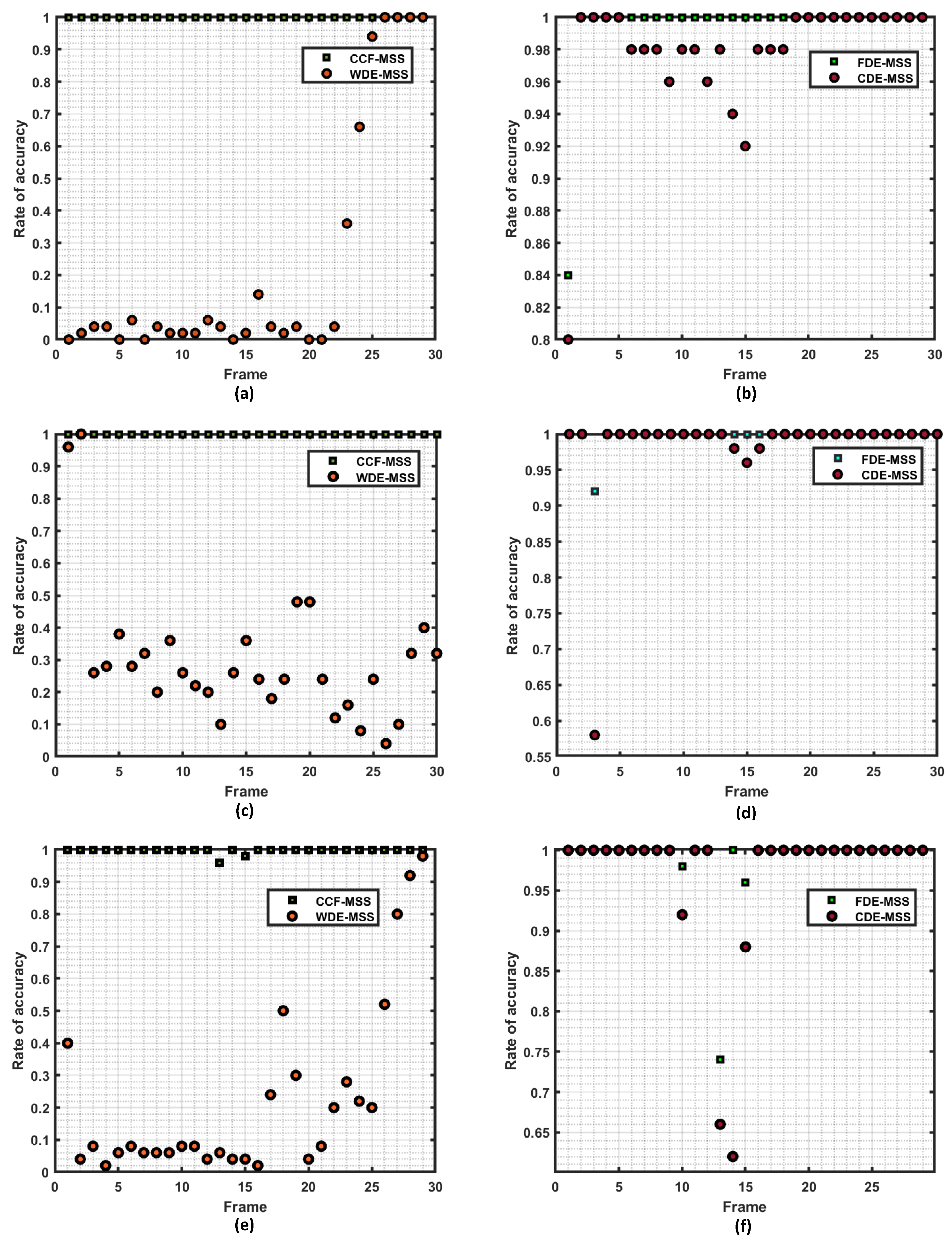
The frame accuracy in the first group of sea trials is depicted in
Figure 9a,b, where CCF-MSS exhibits a BER of 0, indicating superior decoding performance. WDE-MSS achieved zero bit errors only in frames 26 to 29, while achieving an accuracy of 0.9 in frame 25, resulting in an overall error rate of 0.7717. The reason for this can be attributed to the decrease in vessel speed during the later stages of the trial, which significantly reduced the Doppler effect, thus restoring decoding capability. When using CDE-MSS, several frames in the middle experienced bit errors, which was due to inaccurate coarse Doppler estimation during the variable speed process, resulting in incorrect compensation of the CFO value, with an overall error rate of 0.0275. The decoding performance of FDE-MSS is significantly better than that of the other two traditional methods, indicating that fine Doppler estimation is an effective means to overcome the Doppler shifts caused by complex time-varying channels, with a total BER of 0.0055. Except for the significant difference in the processing results of the first frame, the decoding performances of FDE-MSS and CCF-MSS were comparable during this group of sea trials. The following section will analyze the decoding results of the first frame for both FDE-MSS and CCF-MSS. The time duration of the first frame signal in the figure is approximately 0 to 10 s. It can be observed that the vessel speed is relatively high, reaching up to 3 m/s, with complex background noise and pronounced multipath effects.
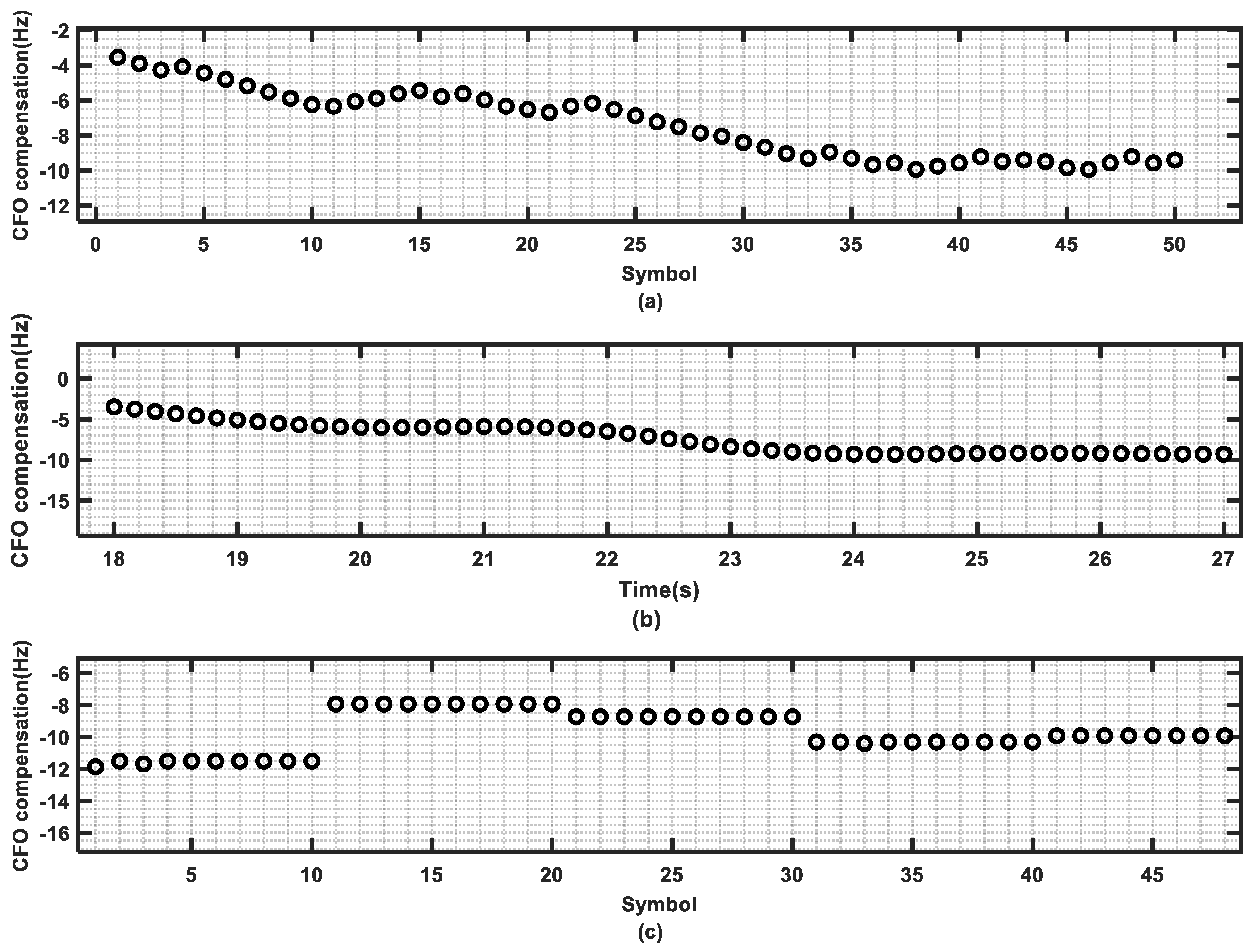
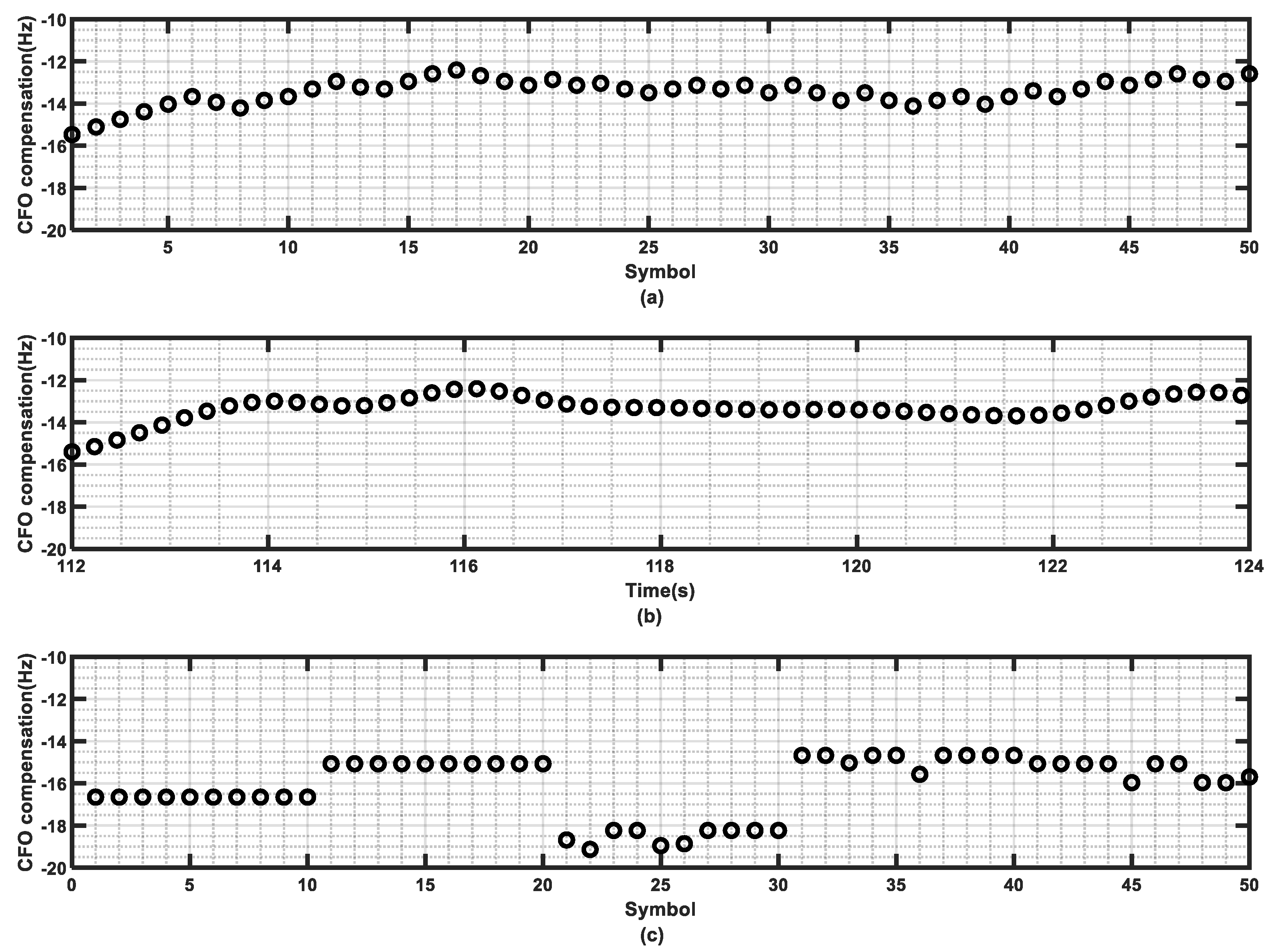
Figure 10a,c shows the final output of the CFO compensation values for CCF-MSS and FDE-MSS in the first frame, while
Figure 10b presents the CFO values calculated from the vessel speed output by the BDS, which can be used as a reference for the actual CFO for comparison. It can be observed that the CFO estimated by CCF-MSS is largely consistent with the CFO calculated from the BeiDou output speed, indicating that the decoding performance is quite good. However, the CFO compensated by FDE-MSS differs significantly from the measured CFO during symbols 30 to 40. Upon inspection, decoding errors were found in FDE-MSS for symbols 31 to 37. The following section will analyze the despreading results for the specific symbols.
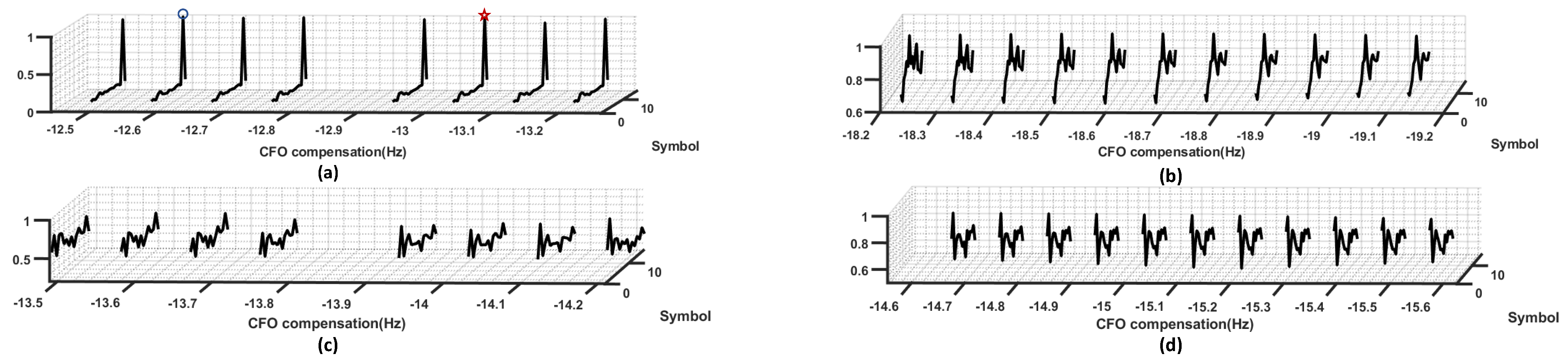
We compared the despreading correlation peaks of the 32nd and 33rd symbols under both CCF-MSS and FDE-MSS reception methods.
Figure 11a presents the despreading result for symbol 32 under CCF-MSS, where the blue circles indicate the maximum peaks under different CFO compensations, and the red pentagons represent the peaks under CFO compensation selected based on the correlation cost factor. We can observe that the position of the output maximum peak corresponds to a CFO compensation of −14.7 Hz, while the correct CFO compensation position for the next symbol is −13.8 Hz (see
Figure 11c). This indicates that relying on the maximum correlation peak to select the CFO compensation position can lead to inaccuracies, whereas using the correlation cost factor allows for the selection of CFO compensation values that align with the correct frequency shift trend.
Figure 11b,d shows the despreading results for symbols 32 and 33 under different CFO compensations for FDE-MSS, which are completely erroneous. From
Figure 11, it is evident that there are significant differences in the range of CFO compensations between the two reception methods, which can be attributed to the fact that FDE-MSS did not utilize the cost factor for Doppler estimation, resulting in inaccuracies in the estimation direction, leading to a gradual accumulation of errors and subsequent decoding issues.
4.2. Processing and Analysis of the Second Group of Sea Trial Data
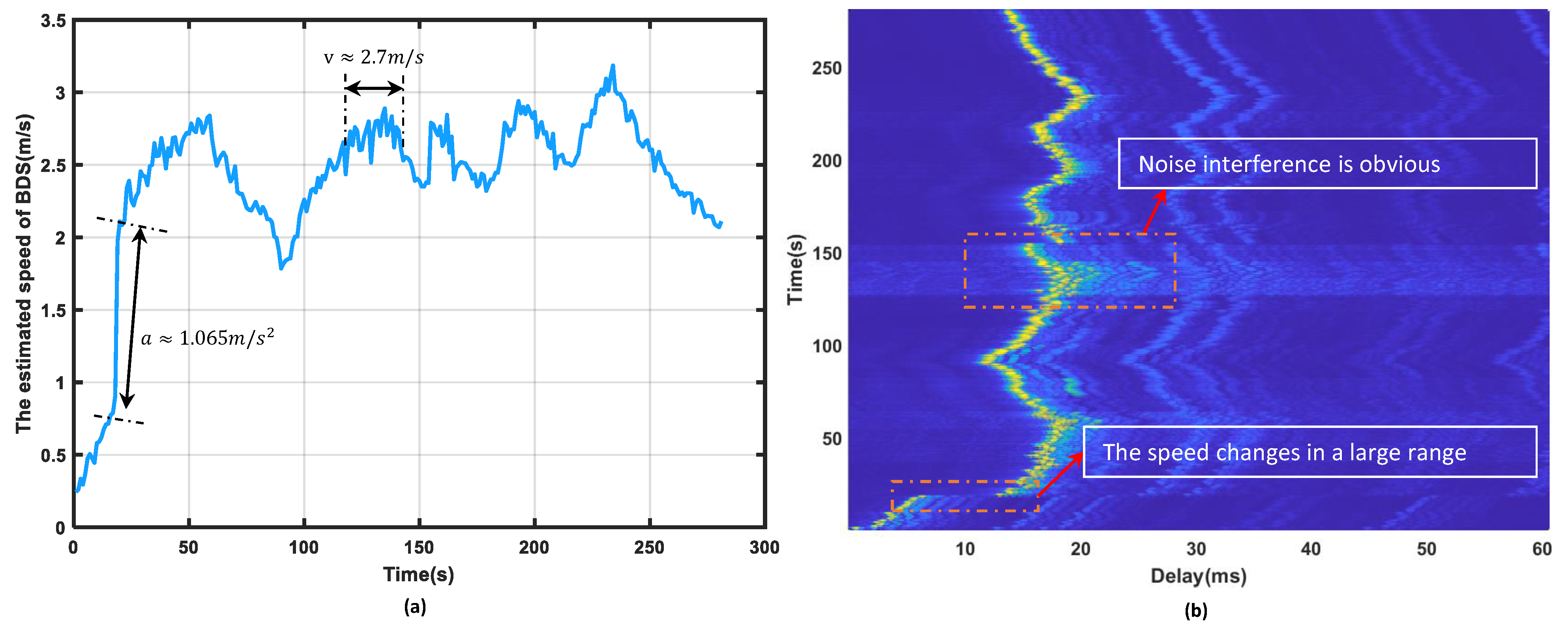
Figure 12a displays the speed recorded during the second sea trial process by the BDS, while
Figure 12b presents the results of the channel impulse response. It is evident that the channel exhibits significant multipath effects during the communication process, and the background noise interference is quite strong.
Figure 9b,d presents the frame accuracy for the second group of trial processes. CCF-MSS maintains a zero bit error rate in each frame, whereas WDE-MSS demonstrates good decoding performance in the first two frames, corresponding to a time period of approximately 1 to 18 s. Based on the radial velocity data output from the BDS, the system is currently in an acceleration phase, with corresponding speeds ranging from approximately 0.3 to 0.7 m/s, and the corresponding acceleration is approximately 0.036 m/s
2. The performance of WDE-MSS deteriorates significantly after the third frame, and both CDE-MSS and FDE-MSS also exhibit bit errors. As seen in
Figure 12a, there is a significant change in speed at the beginning of the third frame, with the maximum acceleration during the entire third frame reaching 1.065 m/s
2. The following section will analyze the decoding process of the third frame data from the second group of trials.
Following the same analytical approach as previously discussed, we first analyze the CFO compensation results for the third frame data, as shown in
Figure 13. At the beginning of the third frame, there is a significant change in CFO due to the high acceleration at that moment, and the CFO compensation results of CCF-MSS are largely consistent with the results calculated from the radial velocity output by the BDS, showing a similar trend of variation. However, the CFO values compensated by WDE-MSS exhibit significant discrepancies. Taking the despreading results of the third and fourth symbols in the third frame as an example,
Figure 14 displays the correlation peaks for symbols 3 and 4 in the third frame, CCF-MSS shows a favorable despreading performance for symbols 1 and 2, with very sharp peaks, minimal interference, and correct decoding. During the despreading process of the second symbol, only two CFO searches were conducted, which was due to the accurate estimation of the CFO that met the preset threshold for the correlation cost factor ahead of time, leading to the termination of the search. This also reflects the efficiency of the CCF-MSS system.
Figure 14b,d shows the despreading results for FDE-MSS, both of which are erroneous. According to the results of the second group of experiments, compared to FDE-MSS, CCF-MSS exhibits stronger resilience to acceleration and higher Doppler tolerance, allowing for correct decoding at an acceleration of 1.065 m/s
2.
4.3. Processing and Analysis of the Third Group of Sea Trial Data
Through the analysis of the aforementioned sea trial data, it can be concluded that CCF-MSS outperforms other reception methods under conditions of high speed and high acceleration. Next, we analyzed the noise resistance performance of CCF-MSS based on the third group of data.
Figure 15 illustrates the speed and channel impulse response during the third group of sea trials. It is evident that significant noise interference occurred during the third group of sea trials.
Figure 9e,f displays the frame accuracy for decoding using different methods. It can be observed that during periods of strong noise interference, the performance of WDE-MSS and CDE-MSS significantly deteriorates, whereas CCF-MSS maintains a high accuracy rate, indicating that the use of the CCF-MSS reception method can still achieve high spreading gain under high-speed conditions, demonstrating a stronger noise resilience capability.
In the processing of the third group of data, the BER for FDE-MSS and CDE-MSS is relatively high at frame 13, which corresponds to the position of the white box in
Figure 15, indicating that there is significant noise interference at this time.
Figure 16 presents the CFO compensation results for frame 13. It can be observed that the CFO compensation results of CCF-MSS are largely consistent with the speed compensation results output by the BDS, while significant discrepancies are noted for FDE-MSS at symbols 20 and 31. We analyze that this is due to the high noise levels at that time, where the decline in spreading gain caused by frequency offset cannot overcome the prevailing noise environment. The following section will illustrate the despreading correlation peaks for symbols 21 and 31 in frame 13 as examples. Symbol 21 is correctly decoded using the CCF-MSS reception method, and while it is incorrectly decoded by the FDE-MSS reception method, Symbol 31 is incorrectly decoded by both methods.
Figure 17 illustrates the despreading correlation peaks for symbols 21 and 31 in frame 13. It can be observed that the range of CFO compensations for symbol 21 differs significantly between the two reception methods. This also indicates that even under high noise conditions, the accuracy of Doppler estimation using correlation cost factors remains high. During the CFO compensation process for symbol 31, although the CFO compensation results from both methods are quite similar to the output results of the BDS, neither method is able to achieve correct decoding. We attribute this decoding failure to the high instantaneous noise levels.
4.4. Processing and Analysis of Sea Trial Data with Added Ocean Noise
After processing and analyzing the data from the three groups of trials, we can conclude that, under conditions where noise interference is not significant, the decoding performance of the four reception methods is relatively similar during low-speed operation. During high-speed operation, the decoding performance of WDE-MSS deteriorates significantly, while the performance of the other three reception methods remains relatively comparable. In situations with significant acceleration variations, only CCF-MSS is able to maintain good decoding performance, while the performance of the other three reception methods declines substantially. When there is significant noise interference and high-speed operation, only CCF-MSS can maintain good decoding performance. In summary, CCF-MSS exhibits superior resilience to speed variations, acceleration, and noise interference. The following section will process different portions of the three groups of sea trial data, incorporating measured ocean noise, to supplement the aforementioned analysis results.
4.4.1. Extraction of Ocean Noise
On the day of the experiment, multiple sets of sea trial noise were extracted at different time intervals, and the different groups of noise were mixed in random proportions before being added to various portions of the sea trial data for Monte Carlo simulations.
4.4.2. Extraction of Data Under Different Motion States from Sea Trials
Due to significant variations in motion states within each data group and substantial differences between the motion states of different groups, to more clearly demonstrate the superiority of the CCF-MSS reception method, we extracted sea trial data based on different motion states.The data were extracted based on six motion states:
m/s,
m/s,
m/s,
m/s
2,
m/s
2, and
m/s
2, and ocean trial noise was added to these states. The BER curves are shown in
Figure 18.
Based on the processing of the sea trial data, we can draw the following conclusions: 1. Under low signal-to-noise ratio and complex motion conditions, CCF-MSS demonstrates superior noise resistance, speed resilience, and acceleration tolerance compared to other reception methods. At a speed of 3 m/s, when the bit error rate reaches , the performance of CCF-MSS improves by approximately 1 dB and 2 dB compared to FDE-MSS and CDE-MSS, respectively. Furthermore, when the acceleration is 1.065 m/s2, at the same BER level, the performance improves by approximately 4 dB compared to FDE-MSS. As the noise intensity increases to a certain level, the performance gap gradually widens. However, when the noise becomes excessively high, the performance differences begin to diminish. 2. Doppler shifts generated by motion can be compensated for through Doppler estimation; however, when acceleration is substantial, the errors generated by coarse Doppler estimation can also be significant, making it easy for the FDE-MSS reception method to yield inaccurate estimates of the frequency shift direction, which results in cumulative errors. In such cases, it is essential to utilize correlation cost factors for subsequent estimations, accurately confining the range of Doppler frequency shift variations within the search interval. 3. Inaccurate Doppler estimation can lead to a significant reduction in spreading gain, resulting in diminished noise resistance, which indicates that the noise resistance of CCF-MSS is attributed to its precise Doppler estimation capability.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}