
Data-Driven Based Path Planning of Underwater Vehicles Under Local Flow Field



Abstract
1. Introduction
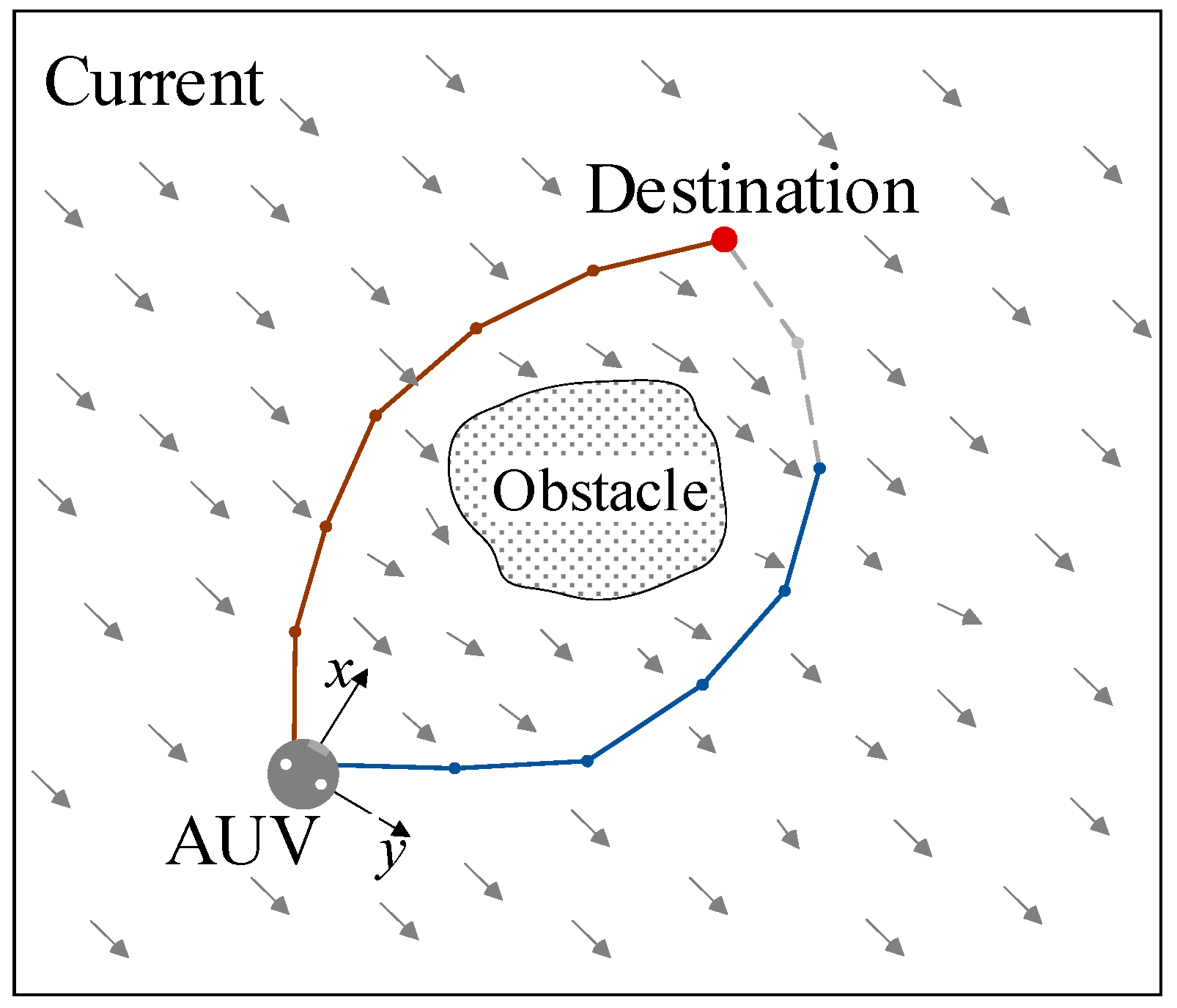
2. Problem Formulation
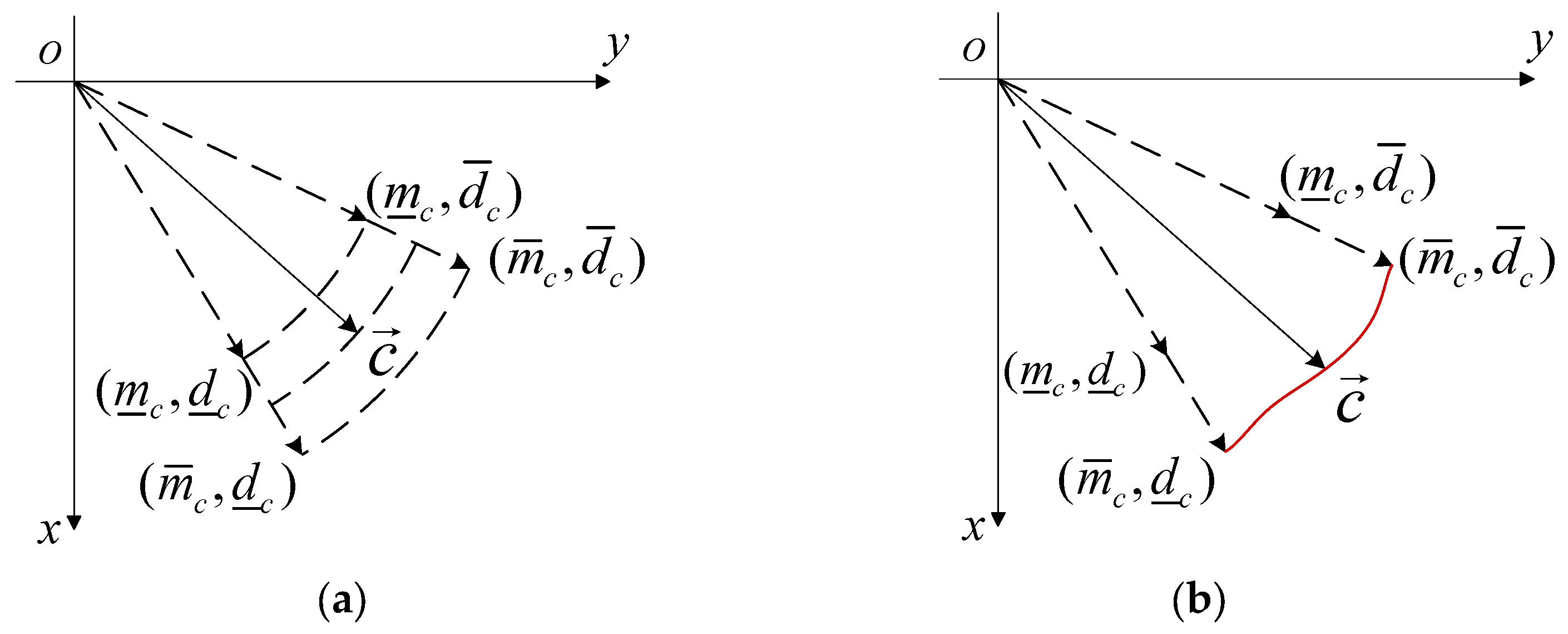
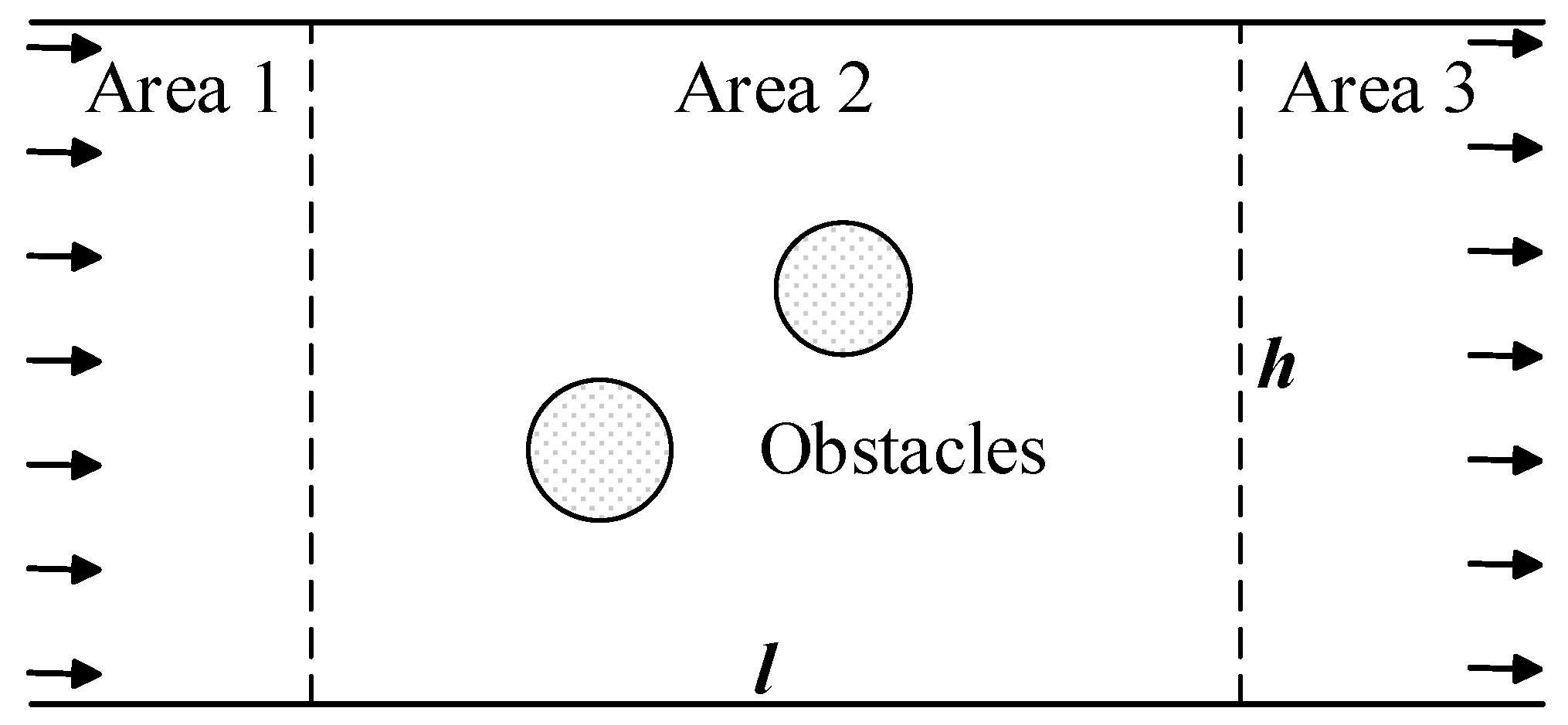
3. Construction of Flow Field Database
4. Directed Expansion Method of Path
5. Path Planning in Mixed Flow Fields
5.1. Standard RRT Algorithm
5.2. Hierarchical Path Planning Algorithm
| Algorithm 1: C-RRT |
| Data: Xstart, Xgoal, workspace S, obstacle Result: T 1 2 3 4 for do 5 6 7 8 if then 9 10 11 if then 12 13 14 15 end 16 end 17 18 if then 19 20 end 21 end 22 return |
- A.
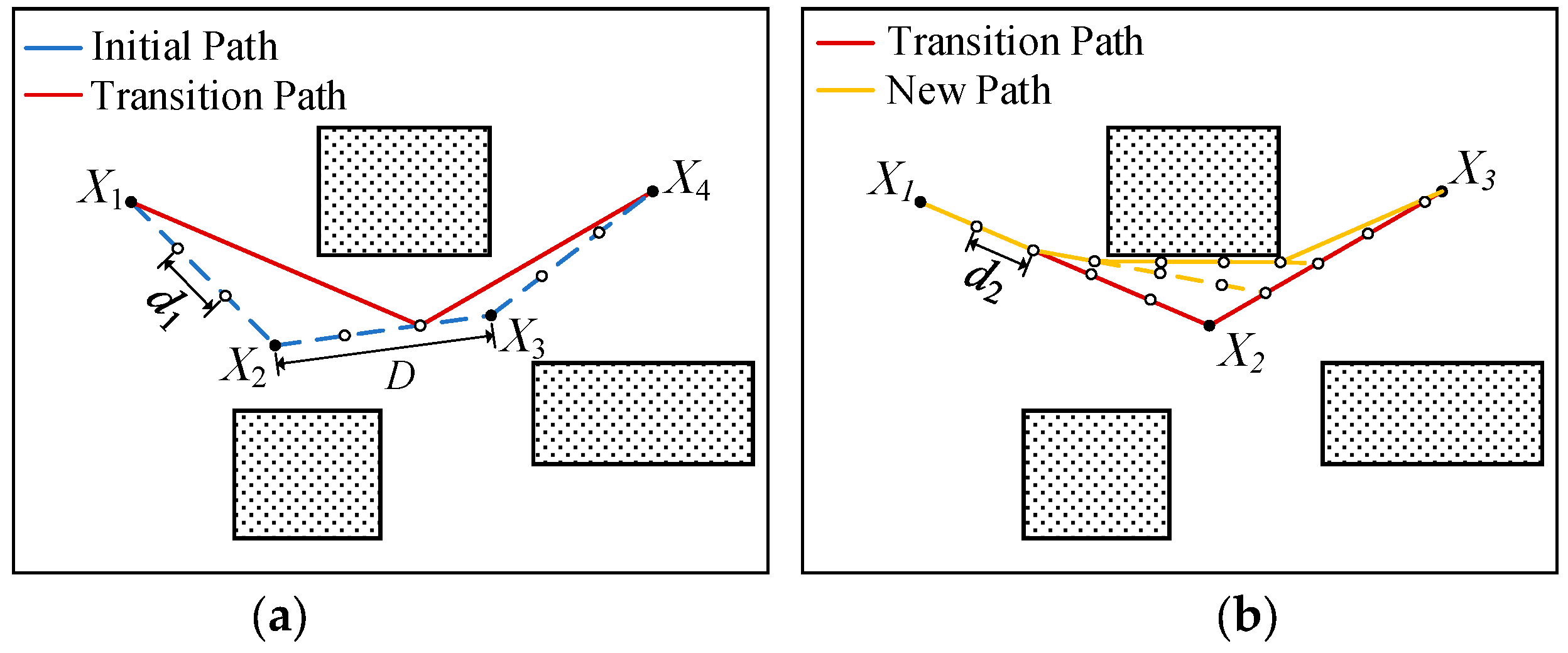
- Path shrinkage
- B.
- Corner optimization
- C.
- Local path correction
5.3. Algorithm Analysis
6. Example Study
6.1. Simulation Parameter Settings
6.2. Result of Path Planning
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cheng, C.; Sha, Q.; He, B.; Li, G. Path planning and obstacle avoidance for AUV: A review. Ocean Eng. 2021, 235, 109355. [Google Scholar] [CrossRef]
- Zhu, D.; Yang, S.X. Path planning method for unmanned underwater vehicles eliminating effect of currents based on artificial potential field. J. Navig. 2021, 74, 955–967. [Google Scholar] [CrossRef]
- Soulignac, M. Feasible and optimal path planning in strong current fields. IEEE Trans. Robot. 2010, 27, 89–98. [Google Scholar] [CrossRef]
- Kruger, D.; Stolkin, R.; Blum, A.; Briganti, J. Optimal AUV path planning for extended missions in complex, fast-flowing estuarine environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 4265–4270. [Google Scholar]
- Vasudevan, C.; Ganesan, K. Case-based path planning for autonomous underwater vehicles. Auton. Robot. 1996, 3, 79–89. [Google Scholar] [CrossRef]
- Zhu, D.; Yang, S.X. Bio-inspired neural network-based optimal path planning for UUVs under the effect of ocean currents. IEEE Trans. Intell. Veh. 2021, 7, 231–239. [Google Scholar] [CrossRef]
- Chu, Z.; Wang, F.; Lei, T.; Luo, C. Path planning based on deep reinforcement learning for autonomous underwater vehicles under ocean current disturbance. IEEE Trans. Intell. Veh. 2022, 8, 108–120. [Google Scholar] [CrossRef]
- Lefebvre, N.; Schjølberg, I.; Utne, I.B. Integration of risk in hierarchical path planning of underwater vehicles. IFAC-Pap. 2016, 49, 226–231. [Google Scholar] [CrossRef]
- Miotto, P.; Wilde, J.; Menozzi, A. UUV on-board path planning in a dynamic environment for the Manta test vehicle. In Proceedings of the Oceans 2003. Celebrating the Past… Teaming Toward the Future (IEEE Cat. No. 03CH37492), San Diego, CA, USA, 22–26 September 2003; IEEE: Piscataway, NJ, USA, 2003; Volume 5. [Google Scholar]
- Wang, K.; Li, S.; Wang, Y.; Xi, J. Smooth-RRT*: An Improved Motion Planner for Underwater Robot. In Proceedings of the 2022 27th Asia Pacific Conference on Communications (APCC), Jeju Island, Republic of Korea, 19–21 October 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar]
- Chowdhury, M.I.; Schwartz, D.G. USV Obstacle Avoidance Using a Novel Local Path Planner and Novel Global Path Planner with r-PRM. In Proceedings of the ISR Europe 2022; 54th International Symposium on Robotics, Munich, Germany, 20–21 June 2022; VDE: Berlin, Germany, 2022. [Google Scholar]
- Heo, Y.J.; Chung, W.K. RRT-based path planning with kinematic constraints of AUV in underwater structured environment. In Proceedings of the 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Republic of Korea, 30 October–2 November 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar]
- Yu, L.; Wei, Z.; Wang, Z.; Hu, Y.; Wang, H. Path optimization of AUV based on smooth-RRT algorithm. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Shchepetkin, A.F.; McWilliams, J.C. The regional oceanic modeling system (ROMS): A split-explicit, free-surface, topography-following-coordinate oceanic model. Ocean Model. 2005, 9, 347–404. [Google Scholar] [CrossRef]
- Hou, M.; Cho, S.; Zhou, H.; Edwards, C.R.; Zhang, F. Bounded cost path planning for underwater vehicles assisted by a time-invariant partitioned flow field model. Front. Robot. AI 2021, 8, 575267. [Google Scholar] [CrossRef] [PubMed]
- Yan, Z.; Zhao, Y.; Zhang, H. A method of UUV path planning with biased extension in ocean flows. In Proceedings of the 10th World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 532–537. [Google Scholar]
- Hao, K.; Zhao, J.; Li, Z.; Liu, Y.; Zhao, L. Dynamic path planning of a three-dimensional underwater AUV based on an adaptive genetic algorithm. Ocean Eng. 2022, 263, 112421. [Google Scholar] [CrossRef]
- Yao, X.; Wang, F.; Yuan, C.; Wang, J.; Wang, X. Path planning for autonomous underwater vehicles based on interval optimization in uncertain flow fields. Ocean Eng. 2021, 234, 108675. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Y.; Miao, G. Three-dimensional numerical simulation of viscous flow around circular cylinder. J. Shanghai Jiaotong Univ. 2001, 35, 1464–1469. [Google Scholar]
- Yang, W.L.; Wu, C.W.; Zhu, Q.L.; Wang, G. Refined study on 3D flow characteristics around bridge piers. J. Southwest Jiaotong Univ. 2020, 55, 134–143. [Google Scholar]
- LaValle, S. Rapidly-exploring random trees: A new tool for path planning. Res. Rep. 9811 1998. Available online: https://lavalle.pl/papers/Lav98c.pdf (accessed on 19 November 2024).
- Kim, J.T.; Li, J.H.; Lee, M.J.; Kim, J.G.; Suh, J.H. Path planning for uncertainty reduced monitoring. In Proceedings of the OCEANS 2014-TAIPEI, Taipei, Taiwan, 7–10 April 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6. [Google Scholar]
- Pugi, L.; Pagliai, M.; Allotta, B. A robust propulsion layout for underwater vehicles with enhanced manoeuvrability and reliability features. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2018, 232, 358–376. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length (m) | Time (s) | Corner | ||||
|---|---|---|---|---|---|---|
| Task a | Task b | Task a | Task b | Task a | Task b | |
| RRT* | 32.3 | 31.7 | 48 | 47 | 7 | 6 |
| C-RRT | 28.2 | 35.3 | 32 | 40 | 3 | 3 |
| A* | 26.1 | 26.3 | 55 | 56 | 3 | 12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, F.; Cheng, B.; Luo, W. Data-Driven Based Path Planning of Underwater Vehicles Under Local Flow Field. J. Mar. Sci. Eng. 2024, 12, 2147. https://doi.org/10.3390/jmse12122147
Jin F, Cheng B, Luo W. Data-Driven Based Path Planning of Underwater Vehicles Under Local Flow Field. Journal of Marine Science and Engineering. 2024; 12(12):2147. https://doi.org/10.3390/jmse12122147
Chicago/Turabian StyleJin, Fengqiao, Bo Cheng, and Weilin Luo. 2024. "Data-Driven Based Path Planning of Underwater Vehicles Under Local Flow Field" Journal of Marine Science and Engineering 12, no. 12: 2147. https://doi.org/10.3390/jmse12122147
APA StyleJin, F., Cheng, B., & Luo, W. (2024). Data-Driven Based Path Planning of Underwater Vehicles Under Local Flow Field. Journal of Marine Science and Engineering, 12(12), 2147. https://doi.org/10.3390/jmse12122147