1. Introduction
Generating clean energy through offshore wind turbines is an excellent option, albeit with a higher economic investment than onshore wind turbines [
1]. The advantage of offshore turbines lies in the higher wind speed, strength, and consistency at sea, unobstructed by barriers or obstacles that may alter the wind’s trajectory. This translates to a more consistent and uniform energy generation. While offshore turbines’ capacity reached 56 GW worldwide in 2021, mainly in Europe and China [
2], there is still a significant need to establish such plants in South America [
3]. In Chile, despite the abundant offshore winds, the bathymetric, operational, and extreme conditions present significant challenges for implementing this technology, which has a high potential in the central and southern regions (33° S to 43° S). Due to the bathymetry of these regions, floating wind platforms offer a better overall solution than bottom-fixed alternatives [
4].
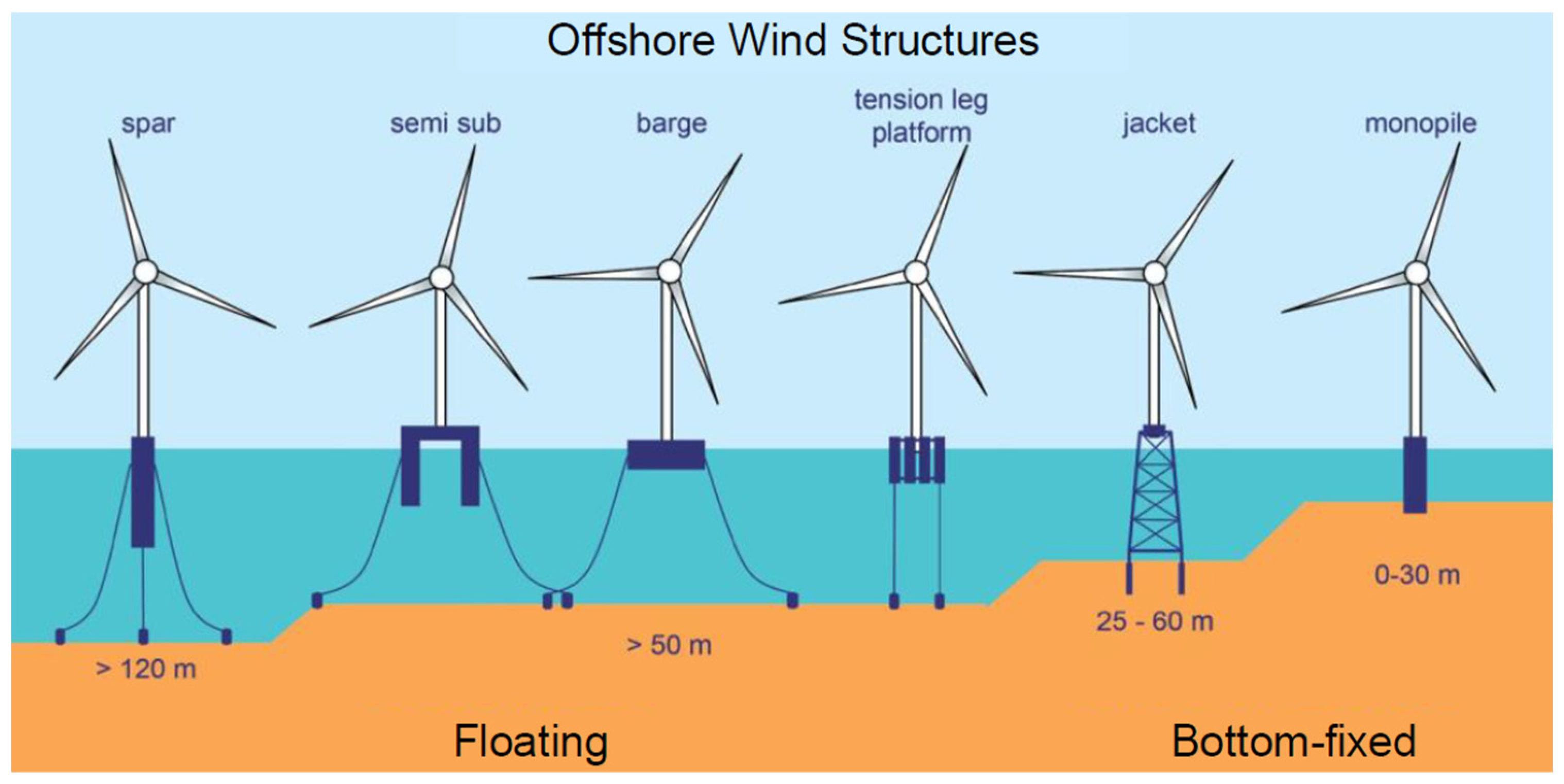
There are four main types of floating wind platforms: tension leg, spar, barge, and semi-submersible. Their main differences, advantages, and specific requirements have been discussed extensively, which have implications for their recommended installation depths and different requirements for their construction and installation. As of today, semi-submersible platforms are considered the most competitive option for deep waters, as they can be optimized and are compatible with a catenary mooring system [
5]. Currently, the catenary mooring system is typically used in Chile’s fish farming centers, making semi-submersible platforms attractive for future implementation.
Faraggiana et al. [
5] conducted a comparative analysis to evaluate the methods and strategies used in the conceptual design of semi-submersible platforms for Floating Offshore Wind Turbines (FOWT). The study revealed that semi-submersible platforms are the most promising option for greater water depths and offer the highest potential for optimization. For water depths less than 60 m, bottom-fixed platforms are considered the optimal solution. The study highlighted the importance of cost reduction, which can be achieved by minimizing the size and quantity of the steel used in construction. The tri-floater-type platform, featuring three floaters, was noted for its cost-effectiveness compared to designs incorporating more floaters. The authors also discussed the stability of semi-submersible platforms, which are stabilized through buoyancy by a large waterplane area inertia, lifting the metacenter above the center of gravity. In contrast, tension-leg platform (TLP) types are stabilized through vertical taut moorings, and spar-type platforms use a heavy ballast placed as low as possible to increase the metacentric height. The semi-submersible platform is a concept which requires a detailed optimization process due to its high cost. However, the three substructure principles described in their paper are often combined in hybrid solutions.
Figure 1 shows a classification diagram that aids in understanding and distinguishing between the different platform concepts.
In recent years, several floating wind platforms have been developed and tested, such as WindFloat [
6], VolturnUS [
7], and Tri-Floater [
8,
9] (semi-submersibles); IDEOL (barge type); HyWind (spar type); and Float4Wind (TLP).
Lefebvre et al. [
10] conducted a comprehensive study assessing seven semi-submersible platform designs. The evaluation criteria included the cost, restoration moment, and construction feasibility. They used the National Renewable Energy Laboratory (NREL) 5 MW turbine design and the Dogger Bank site in the North Sea (UK) as the input. The researchers ultimately identified the most appropriate design and subjected it to rigorous analyses, including structural resistance, mechanical vibration, dynamic response (RAO), and stability. Notably, the design considerations were inspired by the structural requirements outlined by the oil and gas industry’s standards for offshore platforms. The study established specific criteria for acceptance as listed below:
For the static analysis, a minimum safety factor of 1.6 was used since, at the time of publication, there were no specialized codes for calculating offshore wind platforms.
The maximum intact pitch angle for stability was 10°, and for damaged conditions it was 20°.
The maximum offset for the mooring system was 10 m.
The structure dynamics include calculations with the RAOs, including the critical damping and undamped condition for the worst-case scenario.
The authors concluded that the pitch motion is the critical design driver for a wind turbine and the stability of its support structure. Since the study was based on simulation results, they recommended that a scaled model of the structure be tested to validate and understand the hydrodynamic behavior of the system. Kim et al. [
11] reported a comparison of different numerical models of the IEA 15 MW/UMaine floater for an offshore site in South Brittany, France. They focused the work on comparing the results of the different numerical approaches, and concluded that the FOWT model was not well designed for the extreme waves at the South Brittany site [
11]. The WindFloat Atlantic project [
6] is the first pre-commercial wind farm with a semi-submersible technology. It is located off the coast of Viana do Castelo, Portugal, and was launched in 2020. The project aims to provide clean energy to the Portuguese electrical grid and has a calculated lifespan of 25 years. The wind farm was installed 18 km from the coast at a depth of around 100 m. In comparison to the Hiperwind project [
11], the main difference in the WindFloat Atlantic design is the location of the wind generator. It is positioned on one of the floaters, which reduces the number of additional reinforcements needed to connect the tower to the floaters. Another configuration corresponds to the GustoMSC Tri-Floater [
9,
12], with a structural design of a semi-submersible with three floaters. Unlike the previously reviewed models that use a circular design, this platform employs a regular hexagon as the cross section of the floaters, which reduces the construction time and cost by eliminating the need to manufacture large cylindrical columns. This design is also dimensioned for the 5 MW NREL reference wind turbine and located in a fictive offshore site at a 100 m water depth. These aspects simulate the interaction between the wind loads on the rotor and the motions of the floating structure. They concluded, from the very conceptual stage of the design, that the tri-floater design met the design requirements regarding global motions, accelerations, and mooring loads [
9].
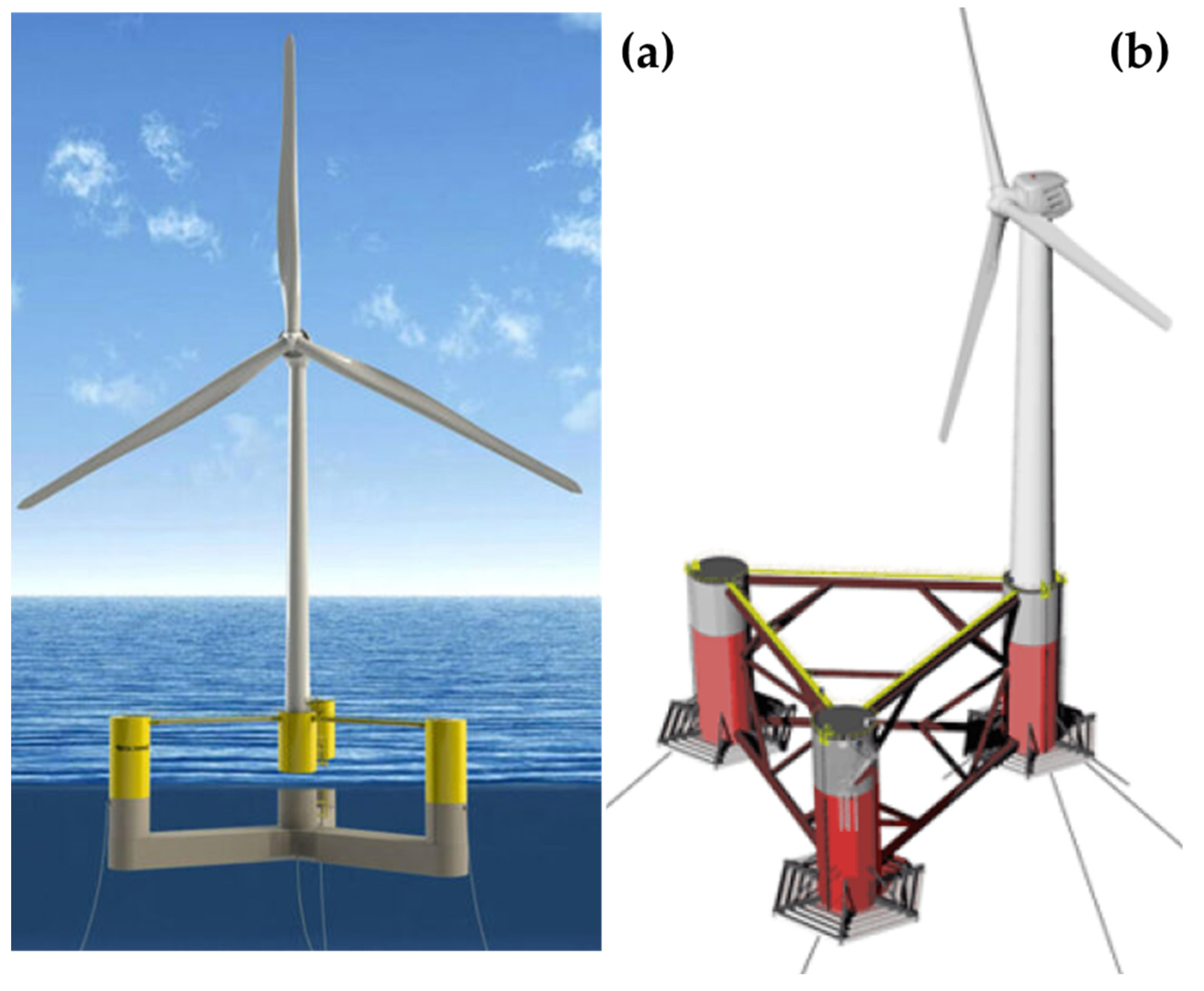
Figure 2 illustrates some of the semi-submersible configurations, such as VolturnUS and WindFloat Atlantic.
This work focusses only on the conceptual and preliminary stage of the structural design process for a semi-submersible platform for use by the potential Chilean offshore wind industry. The design of structures for offshore wind turbines is a relatively new field. Previous reports in the literature have addressed the early design process in locations such as the UK [
10], France [
11], and other European locations [
6], but there is a lack of information regarding South America and particularly Chile, which has a high potential for utilizing offshore renewable energy [
3,
15].
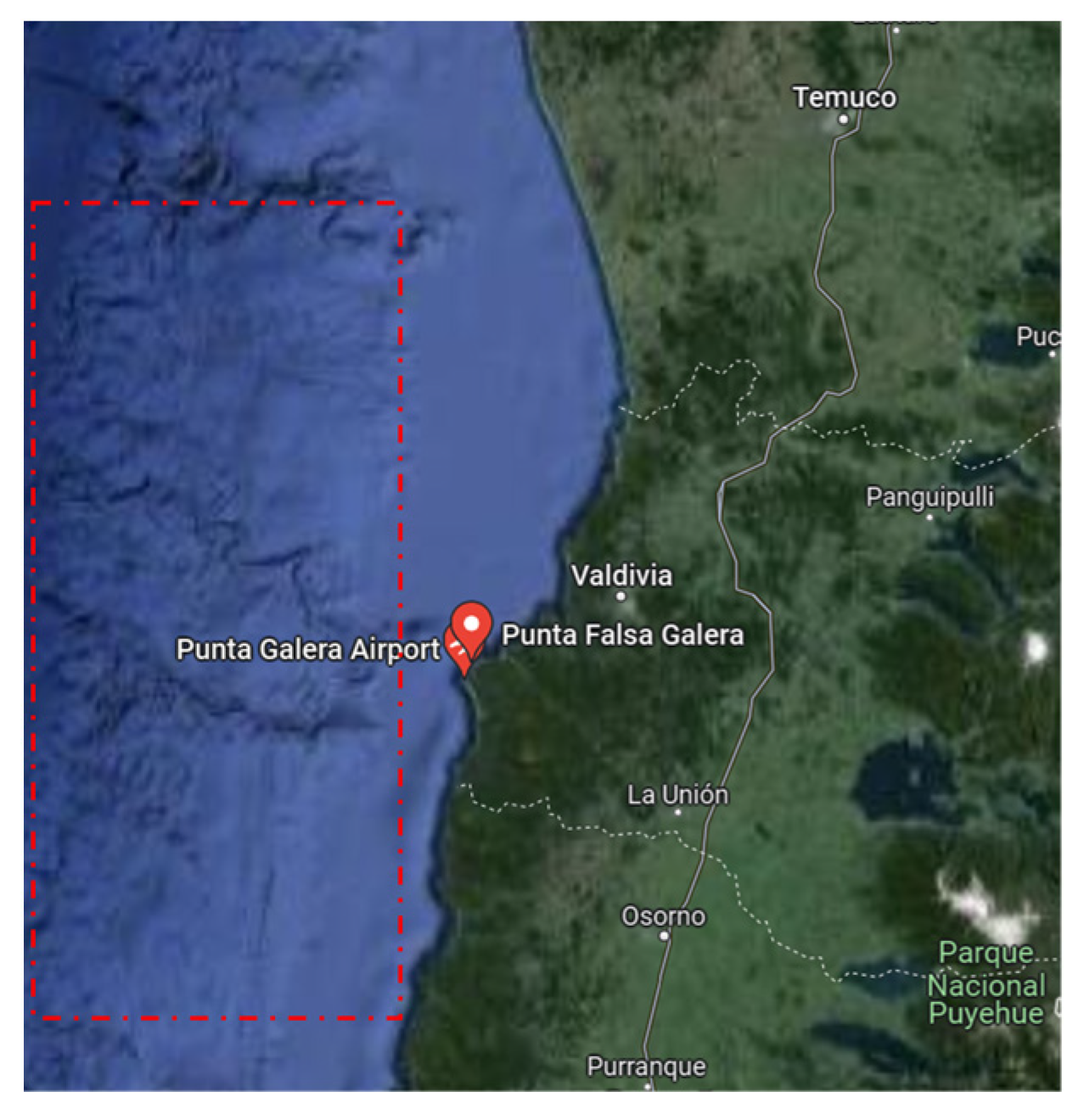
The research described in this paper analyzes different structures from the literature in terms of the size/shape of floaters and the space between them. It also analyzes the substructures that connect the floaters and tower to propose an early-stage design for a semi-submersible structure for Chilean waters. The structural design follows the guidelines of the DNV classification society for floating wind turbine structures [
16], environmental conditions and environmental loads [
17]. In addition, the sea and wind conditions used for the design process correspond to an area near to the coast of Valdivia, a city in the Los Rios region of Chile, as indicated in
Figure 3 [
18,
19].
4. Discussion
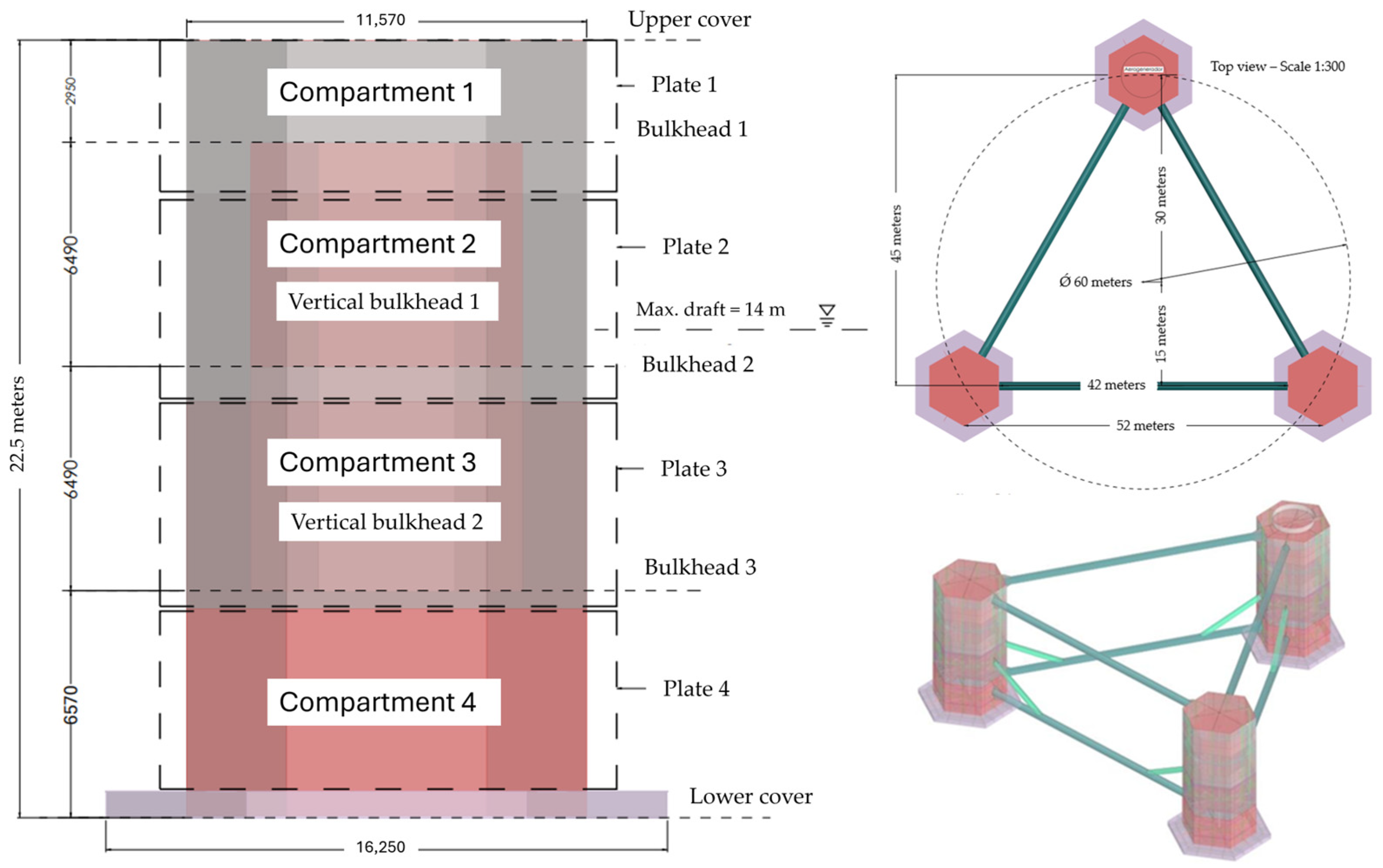
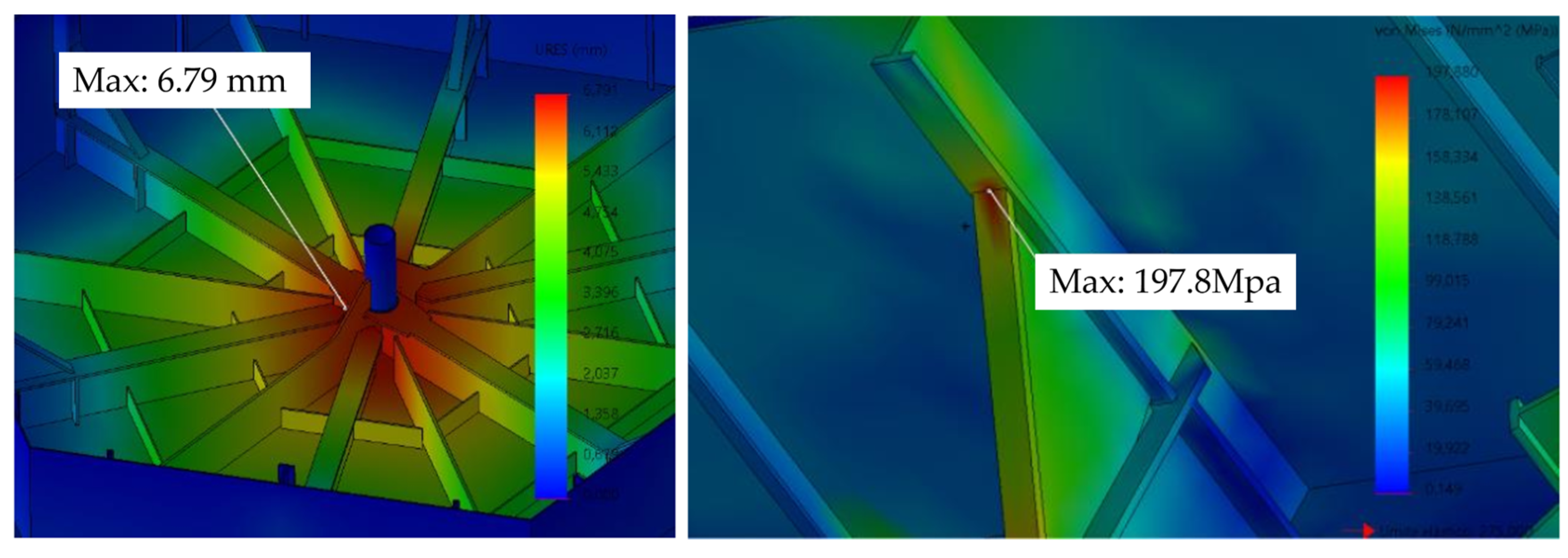
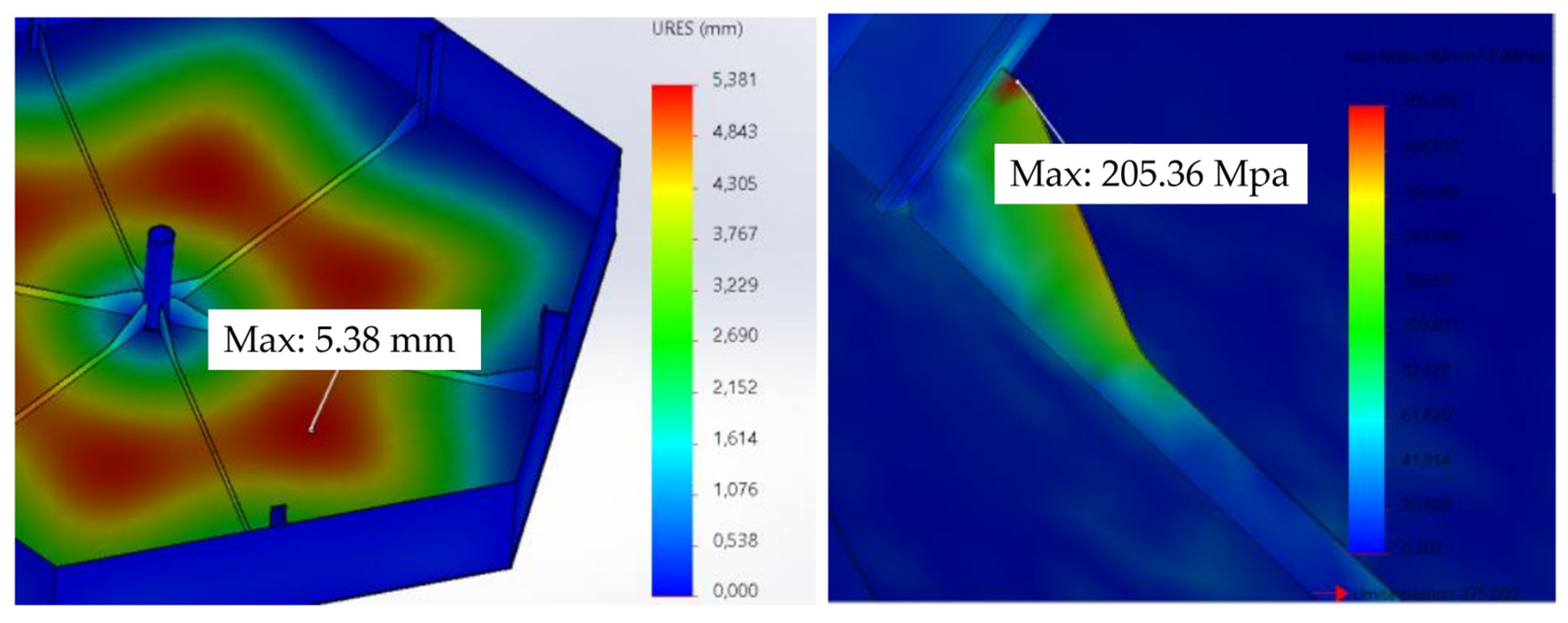
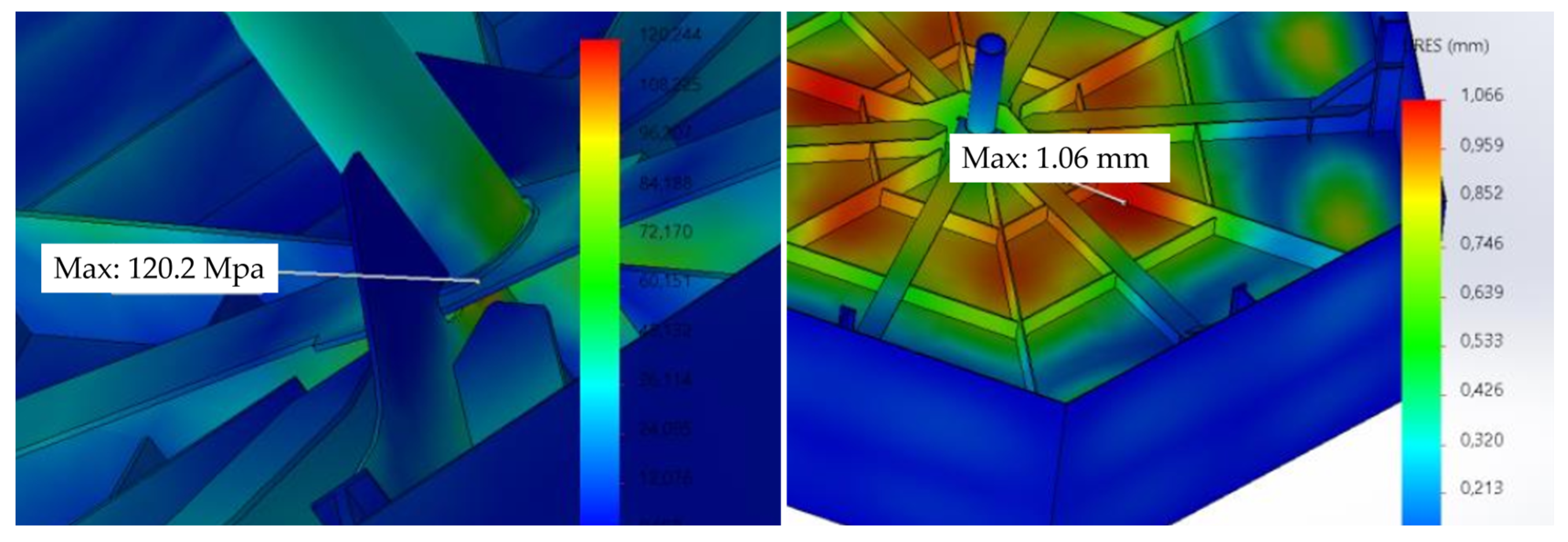
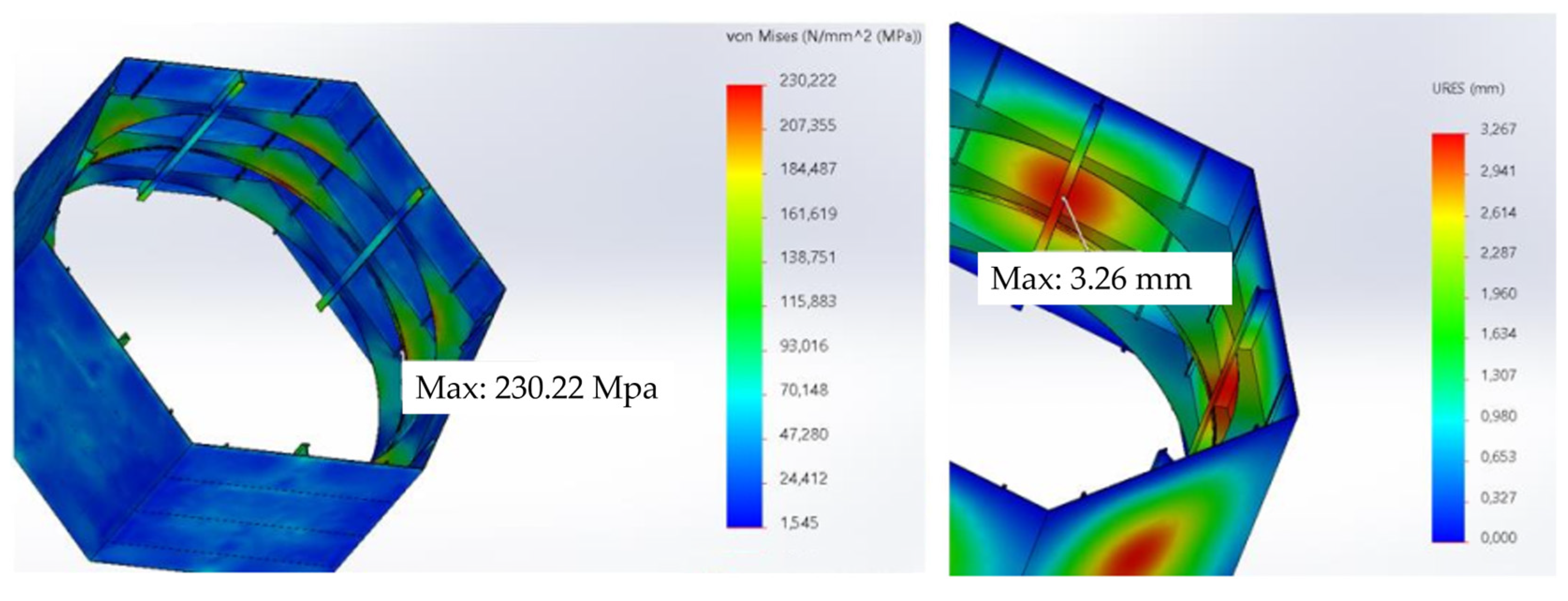
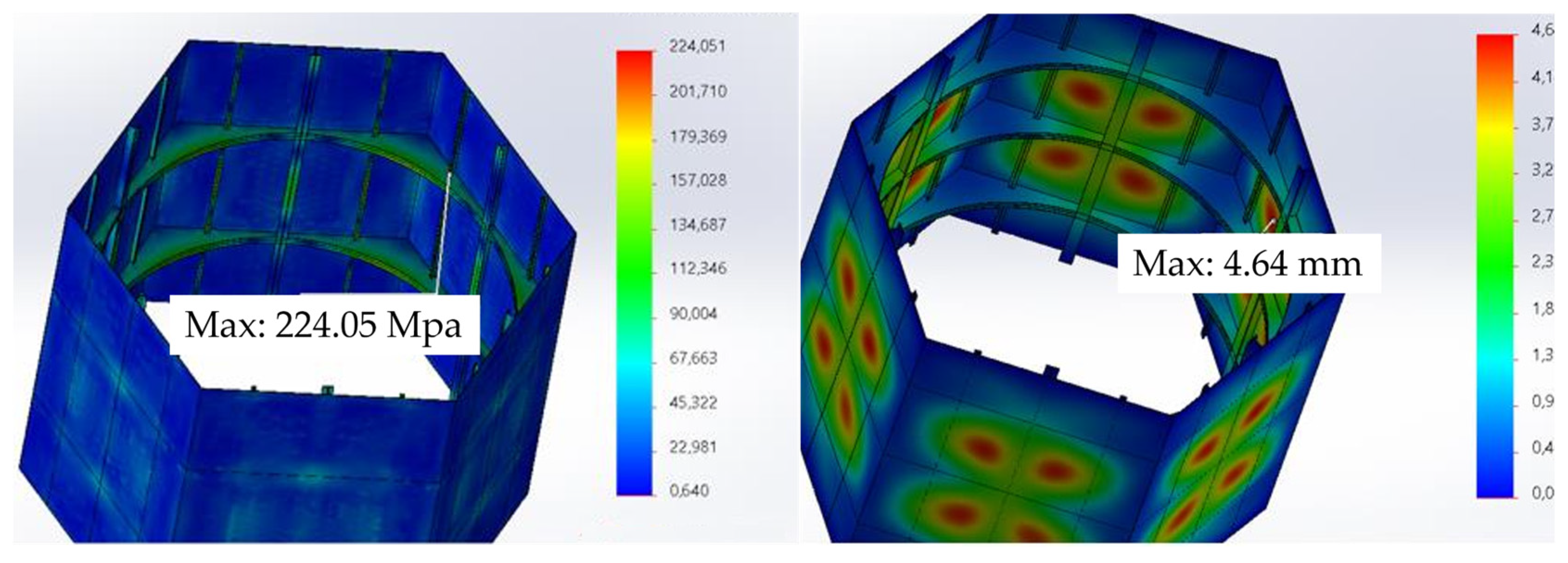
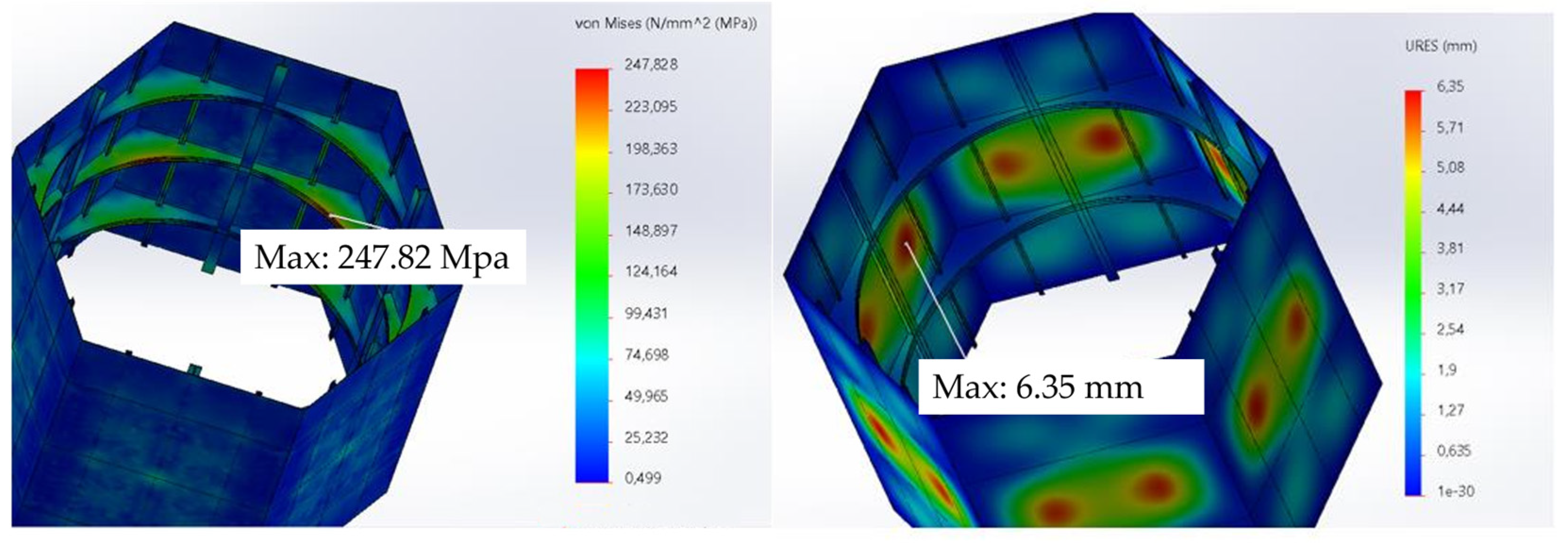
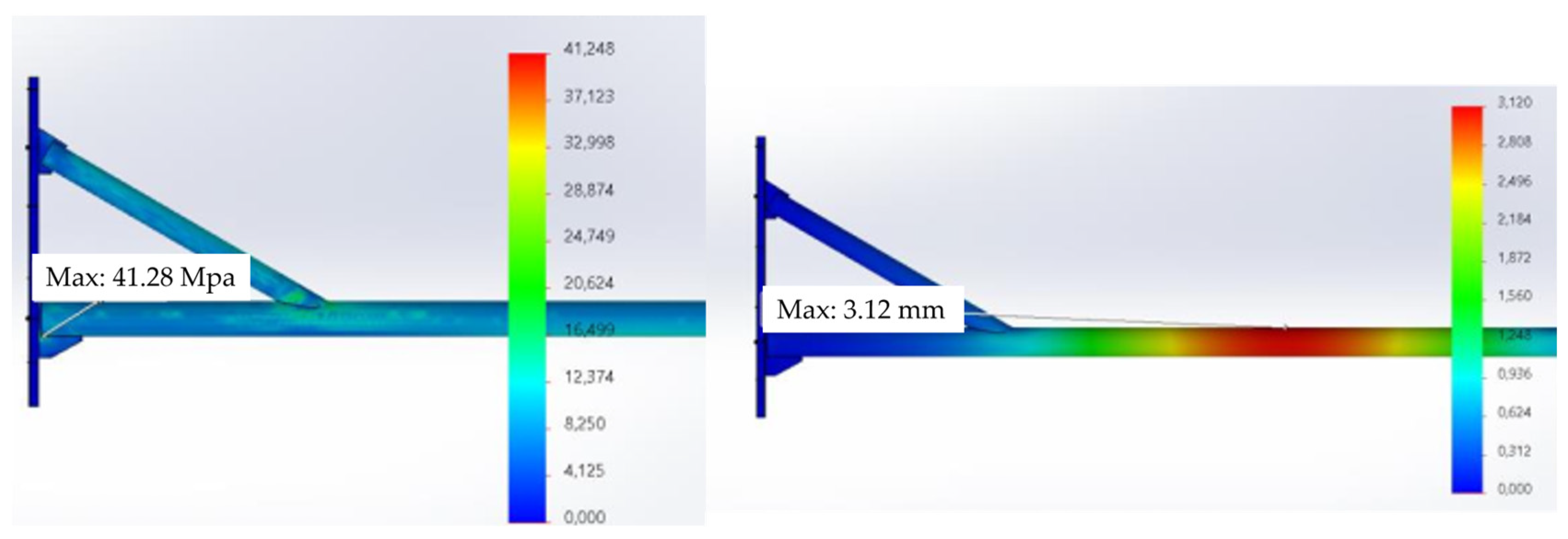
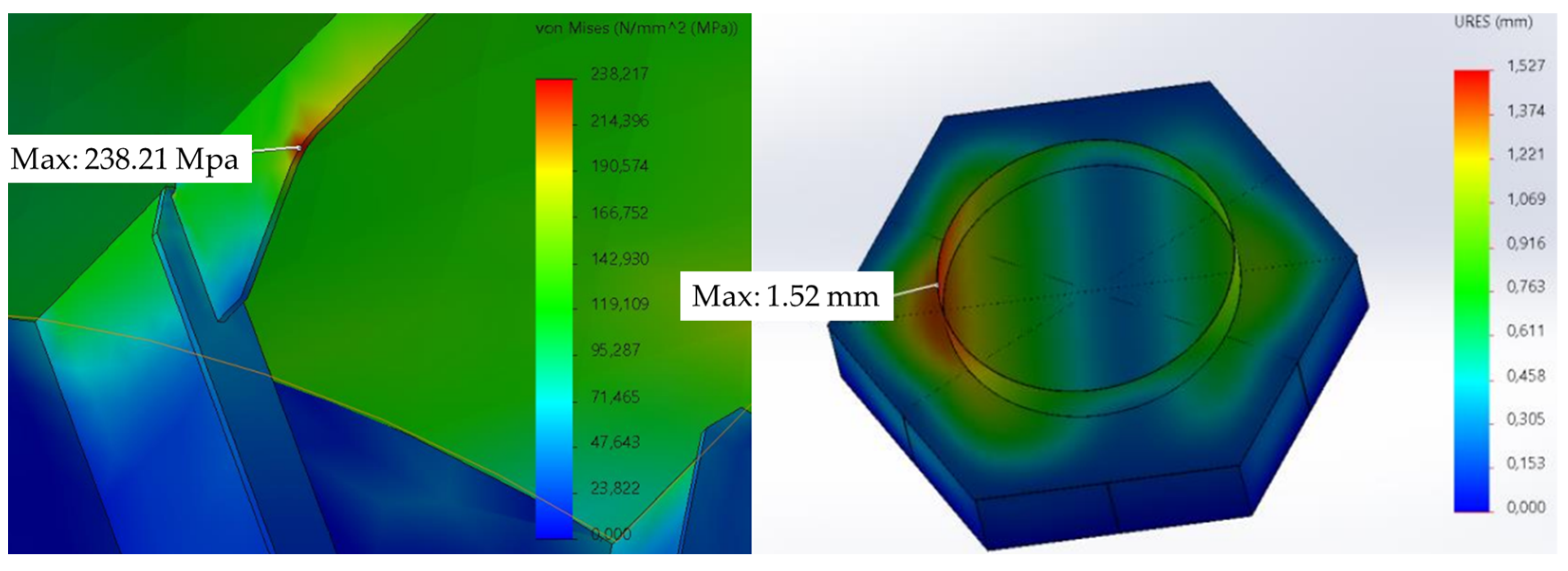
The proposed semi-submersible platform design was based on several previous tri-floater concepts. Among the principal features of the platform are the hexagonal shape of the floaters and the wind turbine tower positioning on one of the floaters. The structure was pre-sized in accordance with the DNV standard requirements for scantling. Based on the finite element analysis with a 13 m wave, it was found that the entire offshore structure could support the expected external forces of the Chilean waters within the range of the elastic strain, or below the yield strength of the material.
Only the weight of the platform structure was determined, using a density of 8000 kg/m
3 to consider the plates’ welding and bolting. Then, we compared the weight of the proposed platform of 1172 tons with the weight used in previous studies [
10,
18], where the steel mass was estimated at 1900 and 1582 tons, respectively. It can be concluded that there is a reduction of 728 tons with Lefebvre’s model and 410 tons with Urra’s model.
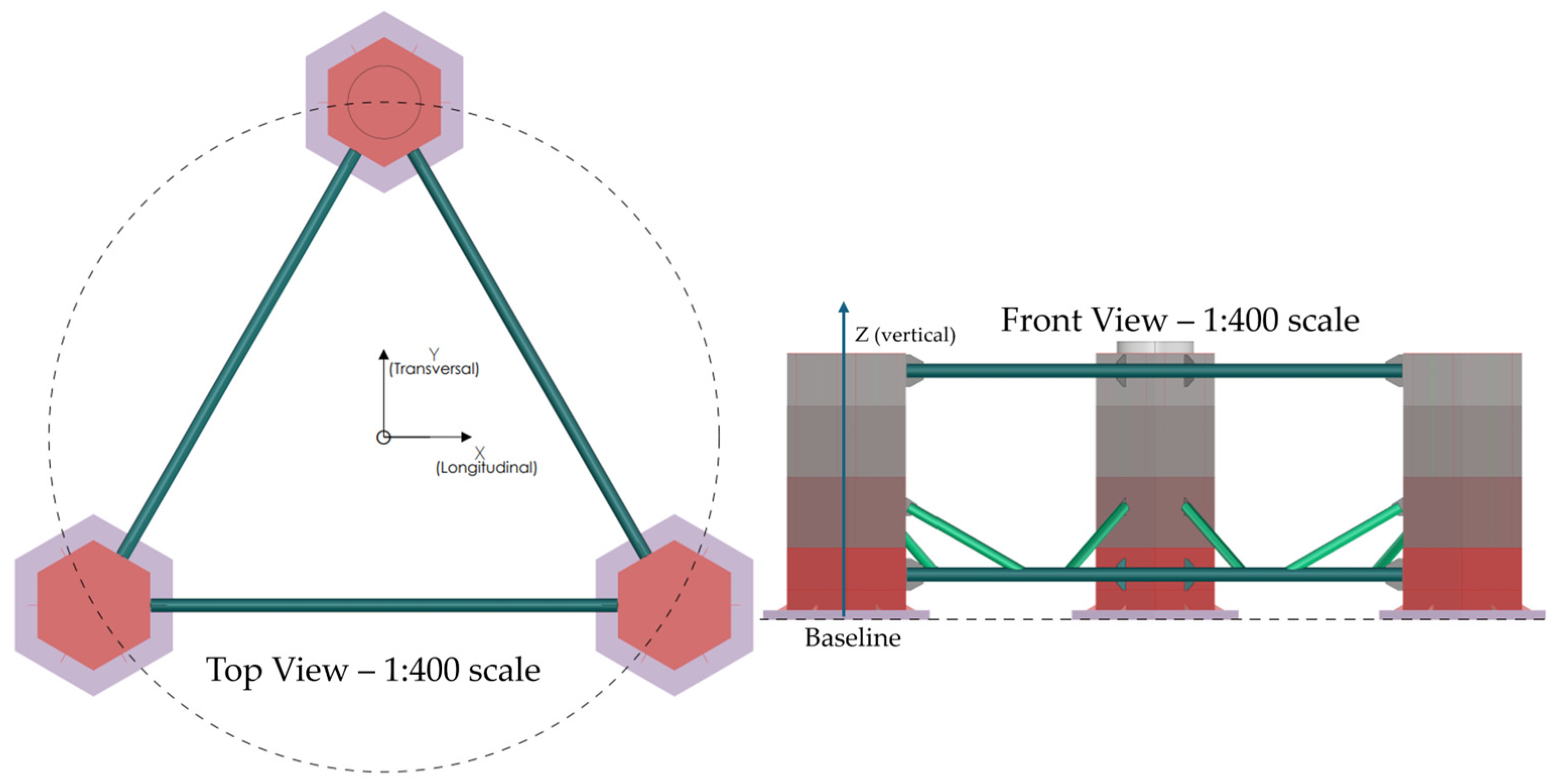
The center of gravity of the structure, including the ballast and the weight of the support structure, wind turbine model, and tower, are shown in
Table 13.
Figure 17 has a different view of the proposed platform structure to show the defined reference system, and the vertical center of gravity is located 22 m from the baseline. This value is similar to the one reported by Lefebvre et al. [
10], and represents an adequate weight distribution. Nevertheless, the final position of the center of gravity will be adjusted after a large-angle stability analysis and a complementary hydrodynamic response study; both evaluations are outside the scope of this research work.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}