
Tsunami Inundation Modelling in a Built-In Coastal Environment with Adaptive Mesh Refinement: The Onagawa Benchmark Test



Abstract
1. Introduction
2. Materials and Methods
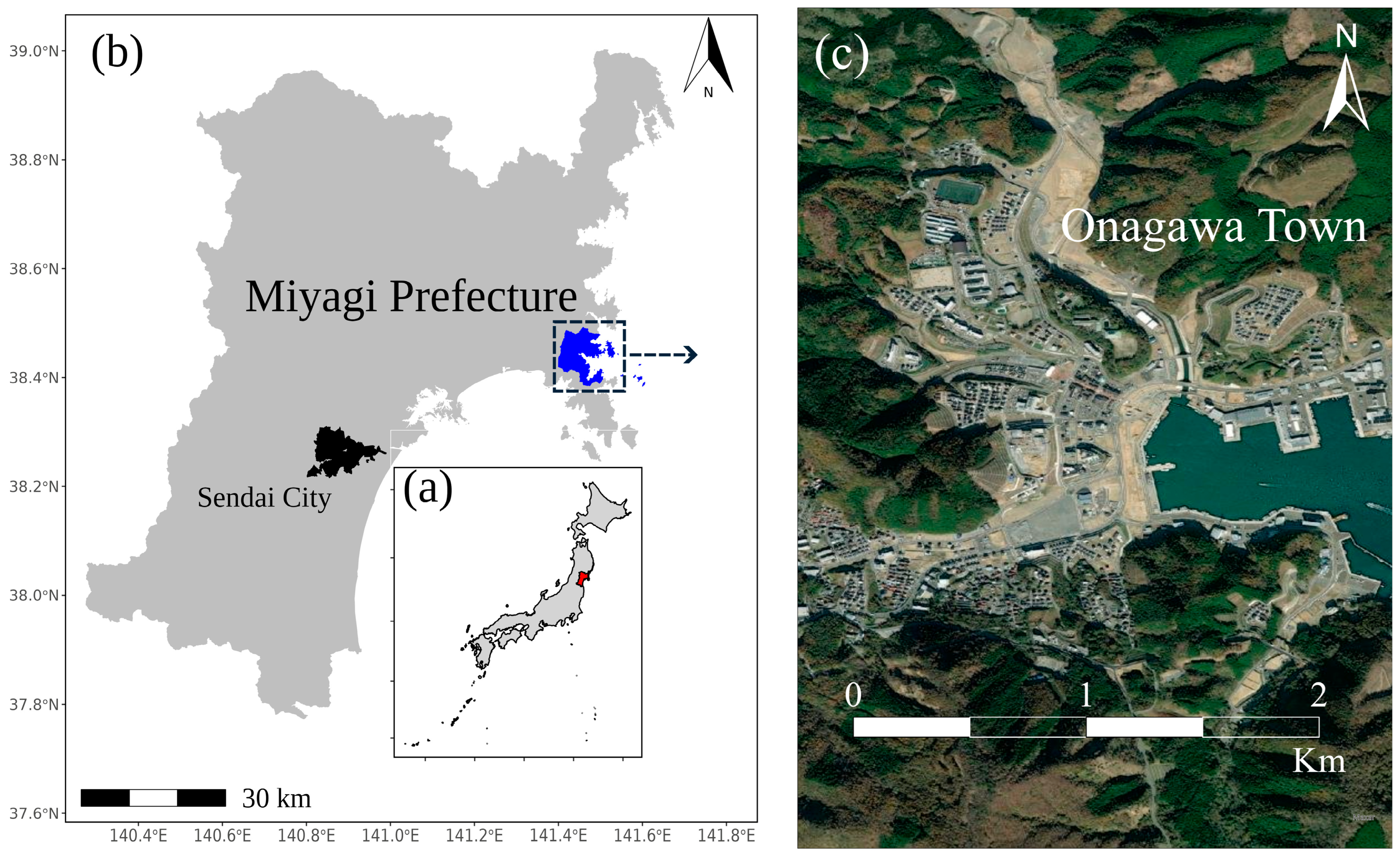
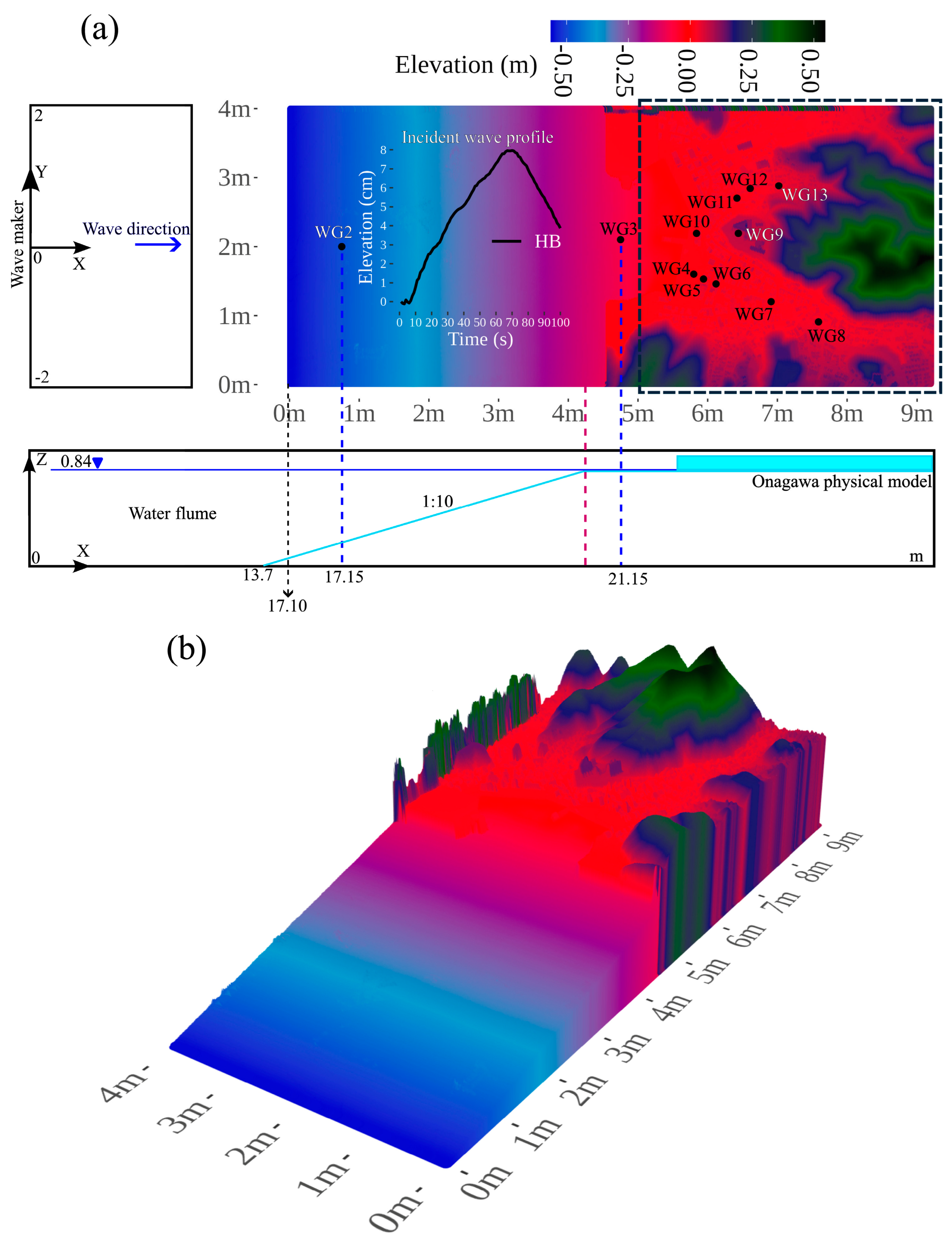
2.1. Onagawa Town Physical and Numerical Experiments
2.2. Open-Source Flow Solver
2.2.1. Saint-Venant (SV) Solver
2.2.2. Serre–Green–Naghdi (SGN) Solver
2.2.3. Multilayer (ML) Solver
2.3. Quadtree Adaptive Mesh Refinement (AMR)
2.4. Dynamic Terrain Reconstruction
2.5. Model Set-Up
- (1)
- The mesh refinement was set between min = 26 (approximately 14 cm) and max = 29 (approximately 1.8 cm);
- (2)
- A maximum simulation time of 100 s and a dry parameter of 0.1 mm were also applied;
- (3)
- In the case of the nonhydrostatic models, the CFL condition and the breaking parameter were defined;
- (4)
- The time series at WG2 was considered an incident wave profile following the same input wave used in the 2D and Q3D experiments [27];
- (5)
- The value of n was set to 0.025 for sea and 0.013 for land in wet cells, following the methods of Prasetyo et al. [27] for accurate comparison with the 2D and Q3D experiments.
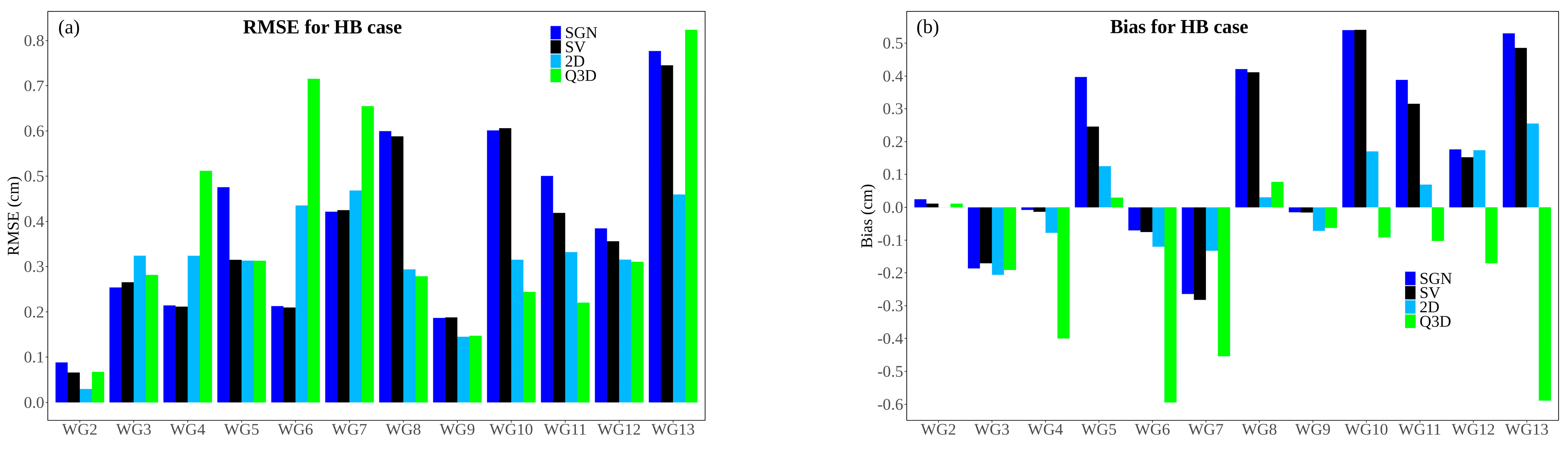
2.6. Statistical Metrics
3. Results
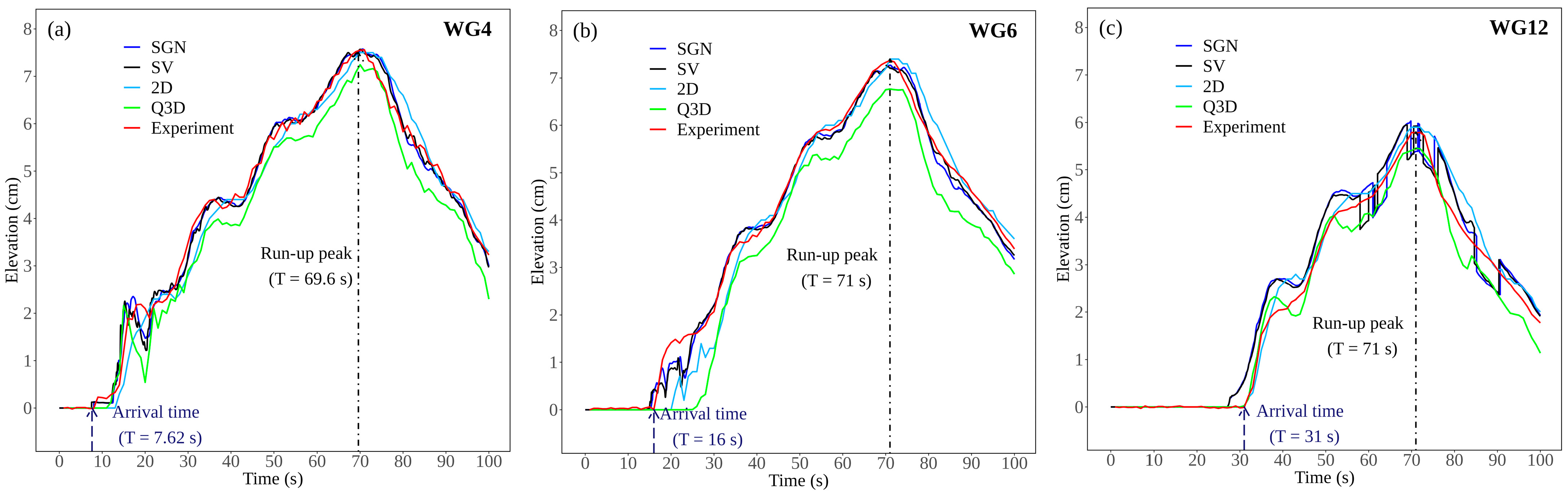
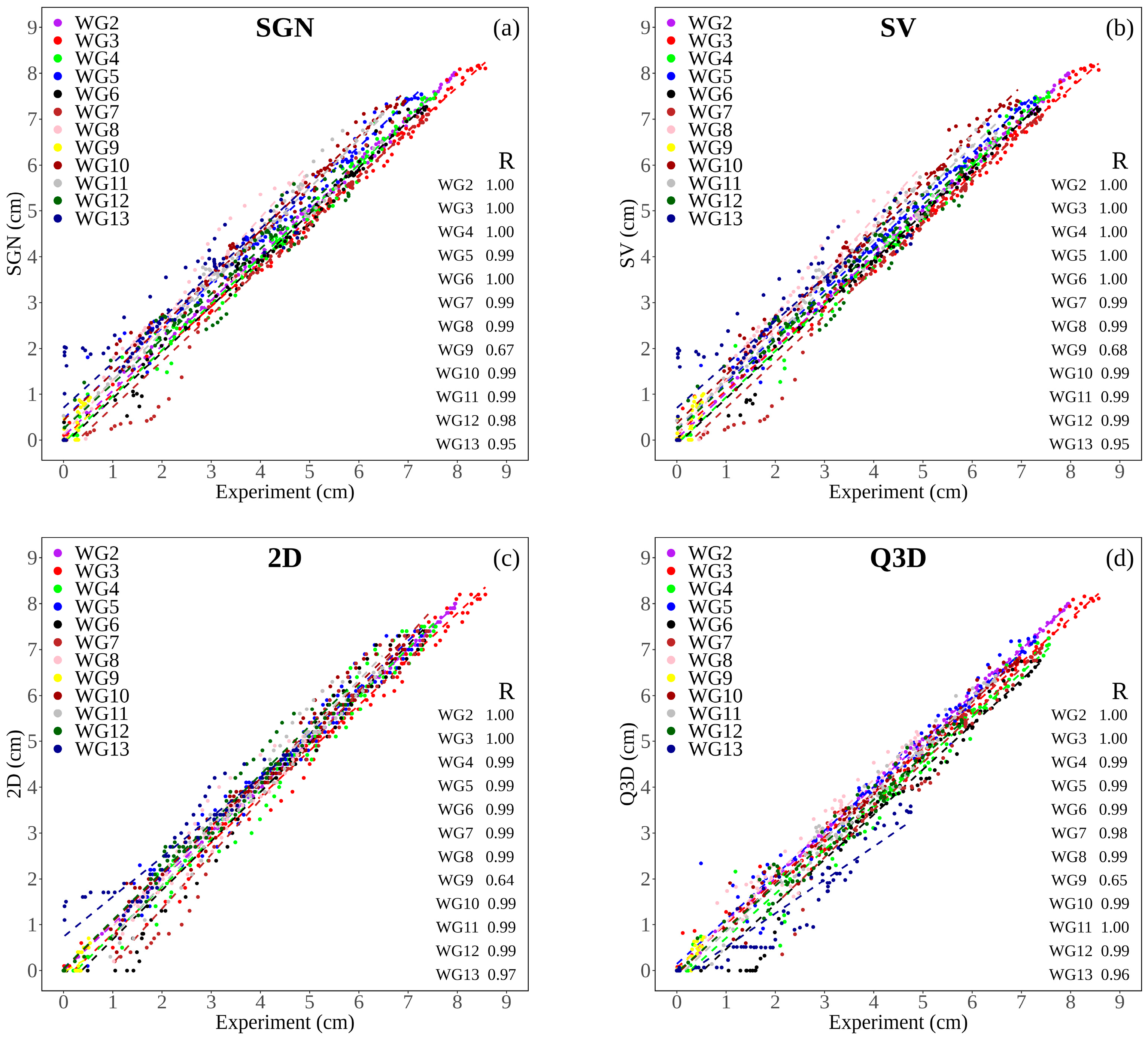
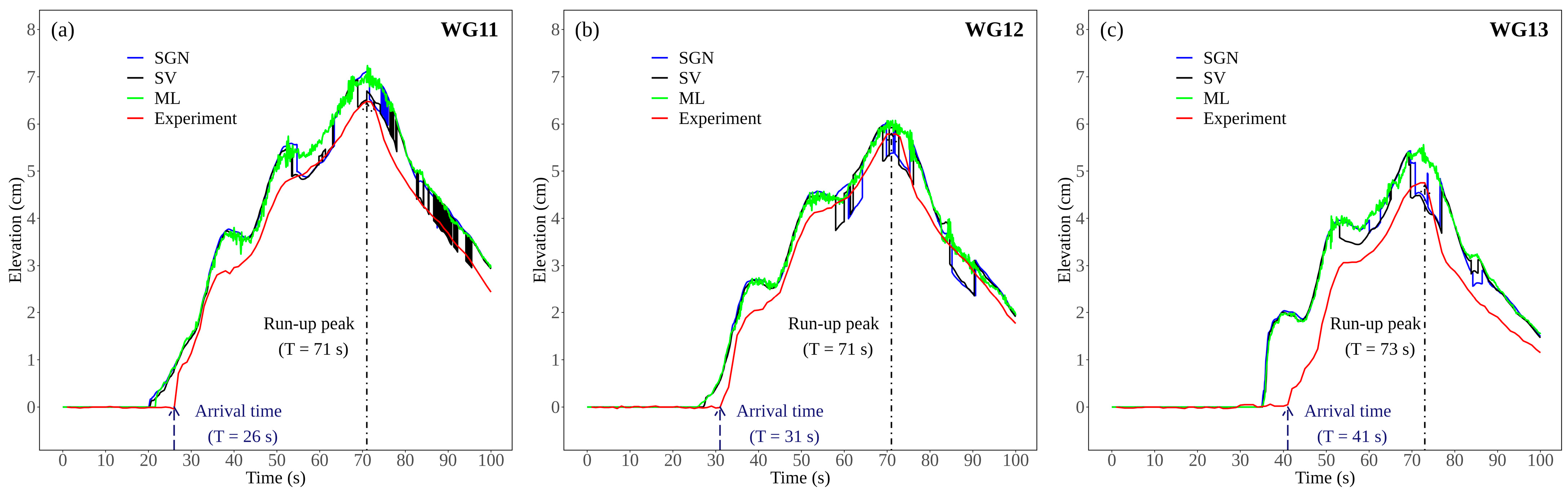
3.1. Validation Using Experimental Results
3.2. Nonhydrostatic Solutions
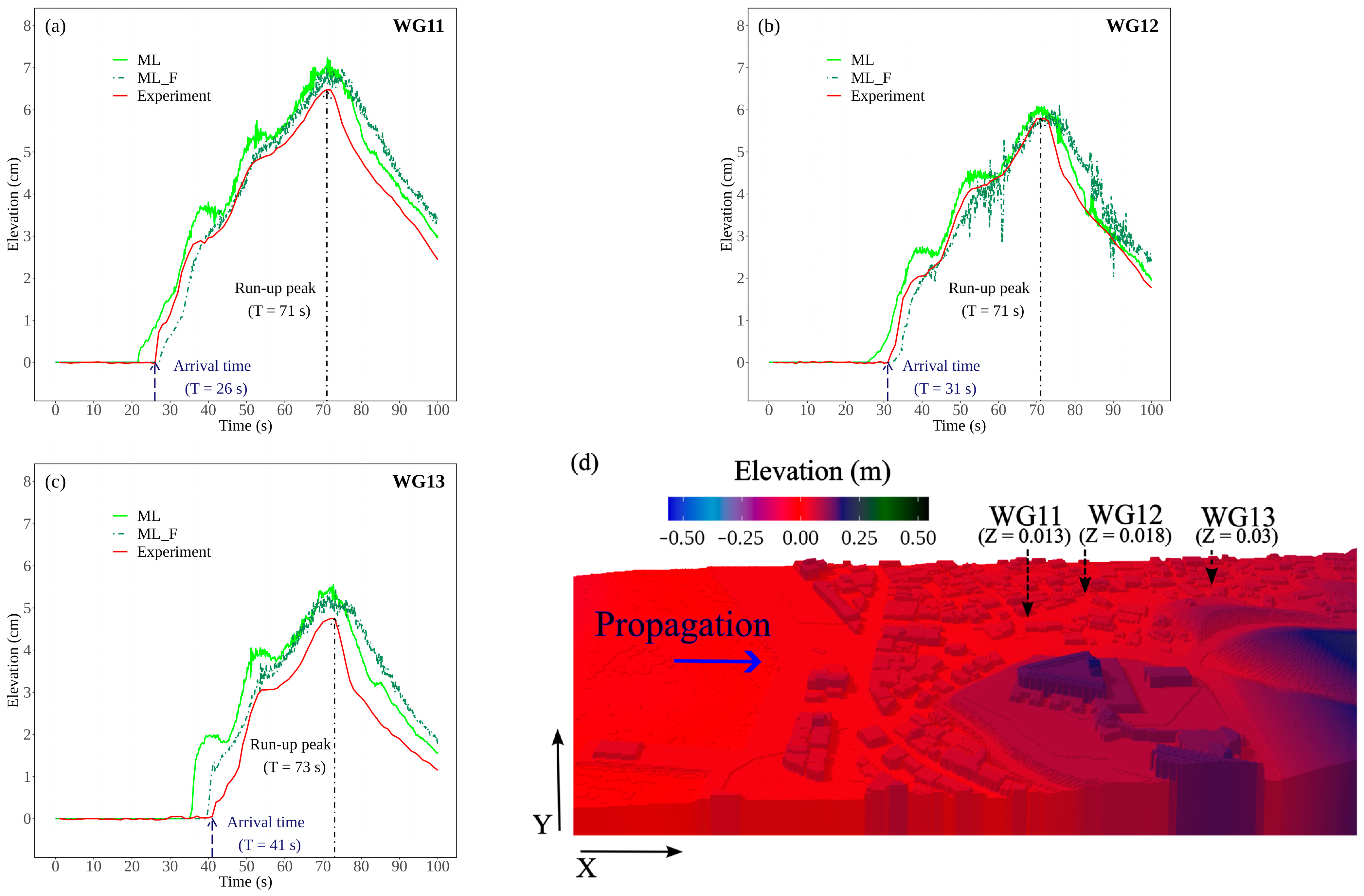
3.3. Improved n Using the ML Solver
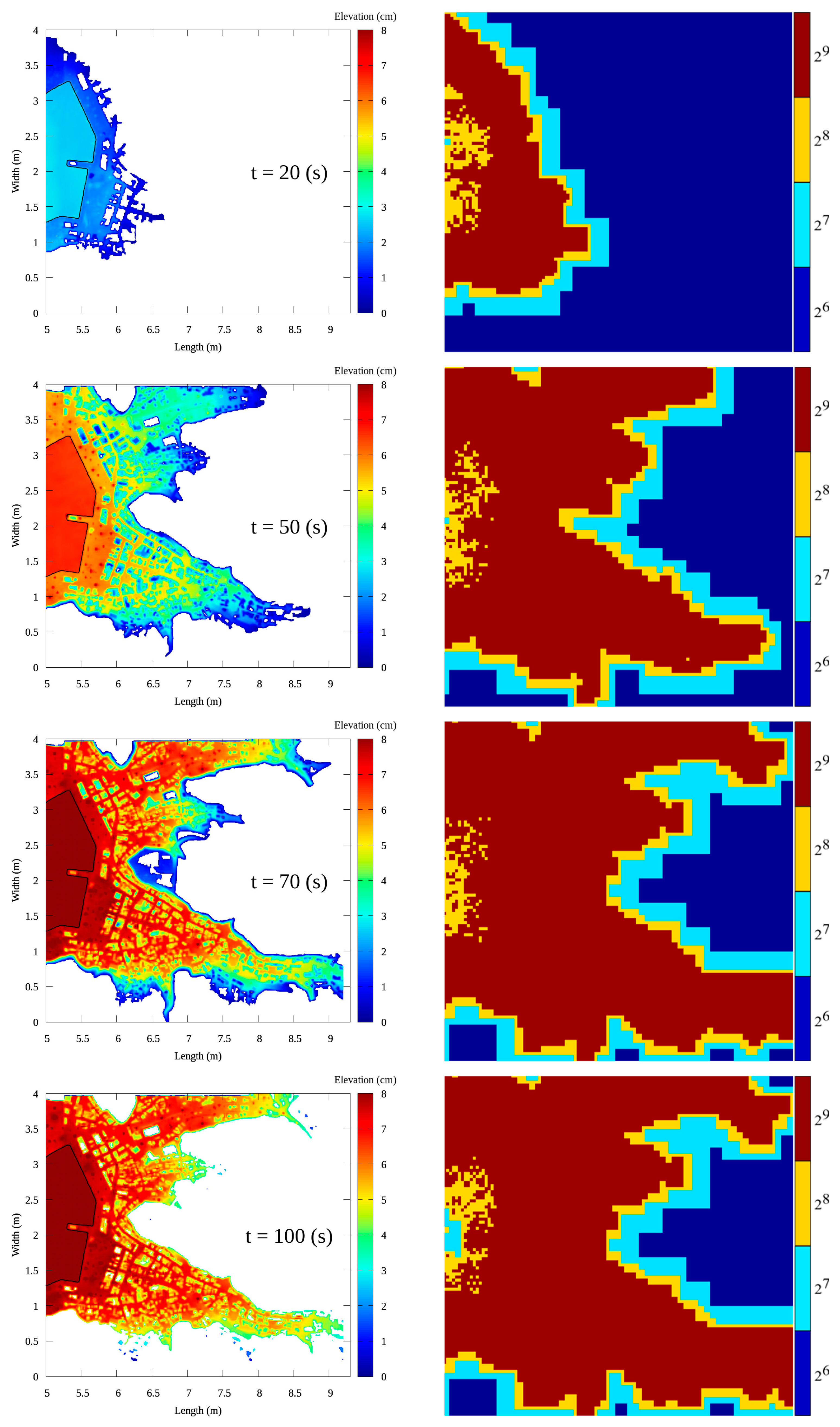
3.4. Spatial Inundation
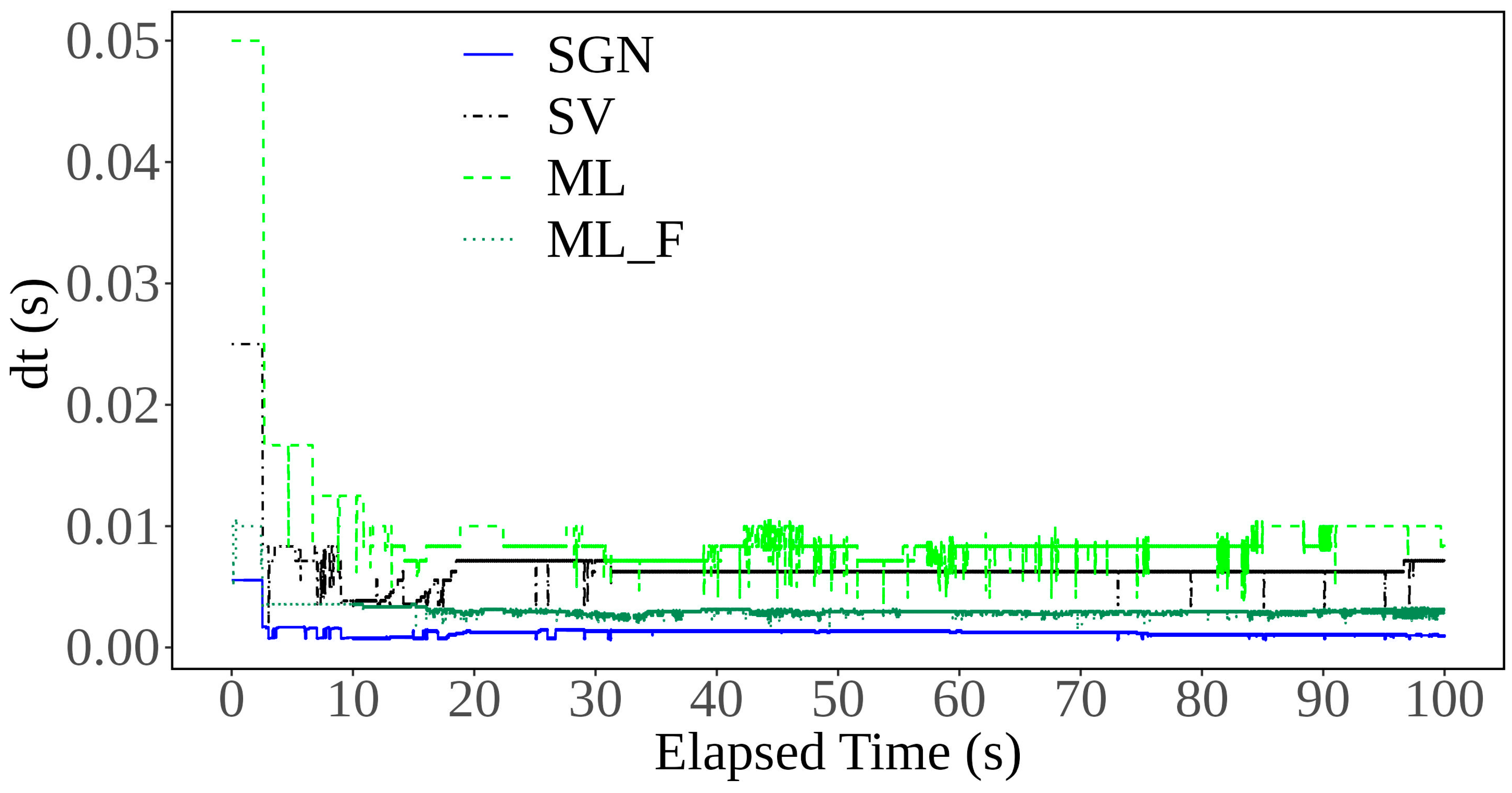
3.5. Computational Time Step
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Goto, K.; Chagué-Goff, C.; Fujino, S.; Goff, J.; Jaffe, B.; Nishimura, Y.; Richmond, B.; Sugawara, D.; Szczuciński, W.; Tappin, D.R.; et al. New insights of tsunami hazard from the 2011 Tohoku-oki event. Mar. Geol. 2011, 290, 46–50. [Google Scholar] [CrossRef]
- Mori, N.; Takahashi, T.; Yasuda, T.; Yanagisawa, H. Survey of 2011 Tohoku earthquake tsunami inundation and run-up. Geophys. Res. Lett. 2011, 38, L00G14. [Google Scholar] [CrossRef]
- Kron, W. Coasts: The high-risk areas of the world. Nat. Hazards 2013, 66, 1363–1382. [Google Scholar] [CrossRef]
- Mukherjee, A.; Cajas, J.C.; Houzeaux, G.; Lehmkuhl, O.; Suckale, J.; Marras, S. Forest density is more effective than tree rigidity at reducing the onshore energy flux of tsunamis. Coast. Eng. 2023, 182, 104286. [Google Scholar] [CrossRef]
- Chida, Y.; Mori, N. Numerical modeling of debris transport due to tsunami flow in a coastal urban area. Coast. Eng. 2023, 179, 104243. [Google Scholar] [CrossRef]
- Fukui, N.; Prasetyo, A.; Mori, N. Numerical modeling of tsunami inundation using upscaled urban roughness parameterization. Coast. Eng. 2019, 152, 103534. [Google Scholar] [CrossRef]
- Sugawara, D. Numerical modeling of tsunami: Advances and future challenges after the 2011 Tohoku earthquake and tsunami. Earth-Sci. Rev. 2021, 214, 103498. [Google Scholar] [CrossRef]
- Watanabe, M.; Arikawa, T.; Kihara, N.; Tsurudome, C.; Hosaka, K.; Kimura, T.; Hashimoto, T.; Ishihara, F.; Shikata, T.; Morikawa, D.S.; et al. Validation of tsunami numerical simulation models for an idealized coastal industrial site. Coast. Eng. J. 2022, 64, 302–343. [Google Scholar] [CrossRef]
- Khakimzyanov, G.; Dutykh, D.; Fedotova, Z. Dispersive shallow water wave modelling. Part III: Model derivation on a globally spherical geometry. Commun. Comput. Phys. 2018, 23, 315–360. [Google Scholar] [CrossRef]
- Khakimzyanov, G.; Dutykh, D.; Gusev, O.; Shokina, N. Dispersive shallow water wave modelling. Part II: Numerical simulation on a globally flat space. Commun. Comput. Phys. 2018, 23, 30–92. [Google Scholar] [CrossRef]
- Khakimzyanov, G.; Dutykh, D.; Gusev, O. Dispersive shallow water wave modelling. Part IV: Numerical simulation on a globally spherical geometry. Commun. Comput. Phys. 2018, 23, 361–407. [Google Scholar] [CrossRef]
- Khakimzyanov, G.; Dutykh, D.; Fedotova, Z.; Mitsotakis, D. Dispersive shallow water wave modelling. Part I: Model derivation on a globally flat space. Commun. Comput. Phys. 2018, 23, 1–29. [Google Scholar] [CrossRef]
- Popinet, S. A quadtree-adaptive multigrid solver for the Serre-Green-Naghdi equations. J. Comput. Phys. 2015, 302, 336–358. [Google Scholar] [CrossRef]
- Glimsdal, S.; Pedersen, G.K.; Harbitz, C.B.; Løvholt, F. Dispersion of tsunamis: Does it really matter? Nat. Hazards Earth Syst. Sci. 2013, 13, 1507–1526. [Google Scholar] [CrossRef]
- Dias, F.; Milewski, P. On the fully-nonlinear shallow-water generalized Serre equations. Phys. Lett. Sect. A Gen. At. Solid State Phys. 2010, 374, 1049–1053. [Google Scholar] [CrossRef]
- Shi, F.; Kirby, J.T.; Harris, J.C.; Geiman, J.D.; Grilli, S.T. A high-order adaptive time-stepping TVD solver for Boussinesq modeling of breaking waves and coastal inundation. Ocean Model. 2012, 43–44, 36–51. [Google Scholar] [CrossRef]
- Lynett, P.J.; Wu, T.-R.; Liu, P.L.-F. Modeling wave runup with depth-integrated equations. Coast. Eng. 2002, 46, 89–107. [Google Scholar] [CrossRef]
- Xu, W.J.; Dong, X.Y. Simulation and verification of landslide tsunamis using a 3D SPH-DEM coupling method. Comput. Geotech. 2021, 129, 103803. [Google Scholar] [CrossRef]
- Sarfaraz, M.; Pak, A. SPH numerical simulation of tsunami wave forces impinged on bridge superstructures. Coast. Eng. 2017, 121, 145–157. [Google Scholar] [CrossRef]
- Aslami, M.H.; Rogers, B.D.; Stansby, P.K.; Bottacin-Busolin, A. Simulation of floating debris in SPH shallow water flow model with tsunami application. Adv. Water Resour. 2023, 171, 104363. [Google Scholar] [CrossRef]
- Reis, C.; Barbosa, A.R.; Figueiredo, J.; Clain, S.; Lopes, M.; Baptista, M.A. Smoothed particle hydrodynamics modeling of elevated structures impacted by tsunami-like waves. Eng. Struct. 2022, 270, 114851. [Google Scholar] [CrossRef]
- Dai, Z.; Li, X.; Lan, B. Three-Dimensional Modeling of Tsunami Waves Triggered by Submarine Landslides Based on the Smoothed Particle Hydrodynamics Method. J. Mar. Sci. Eng. 2023, 11, 2015. [Google Scholar] [CrossRef]
- Liang, Q.; Borthwick, A.G.L.; Stelling, G. Simulation of dam- and dyke-break hydrodynamics on dynamically adaptive quadtree grids. Int. J. Numer. Methods Fluids 2004, 46, 127–162. [Google Scholar] [CrossRef]
- Gisler, G.R.; Weaver, R.P.; Mader, C.L.; Gittings, M.L. Two- and three-dimensional asteroid impact simulations. Comput. Sci. Eng. 2004, 6, 46–55. [Google Scholar] [CrossRef]
- Behrens, J.; Bader, M. Efficiency considerations in triangular adaptive mesh refinement. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2009, 367, 4577–4589. [Google Scholar] [CrossRef] [PubMed]
- Leveque, R.J.; George, D.L.; Berger, M.J. Tsunami modelling with adaptively refined finite volume methods. Acta Numer. 2011, 20, 211–289. [Google Scholar] [CrossRef]
- Prasetyo, A.; Yasuda, T.; Miyashita, T.; Mori, N. Physical modeling and numerical analysis of tsunami inundation in a coastal city. Front. Built Environ. 2019, 5, 46. [Google Scholar] [CrossRef]
- Popinet, S. Adaptive modelling of long-distance wave propagation and fine-scale flooding during the Tohoku tsunami. Nat. Hazards Earth Syst. Sci. 2012, 12, 1213–1227. [Google Scholar] [CrossRef]
- Popinet, S. Quadtree-adaptive tsunami modelling. Ocean Dyn. 2011, 61, 1261–1285. [Google Scholar] [CrossRef]
- Popinet, S. A vertically-Lagrangian, non-hydrostatic, multilayer model for multiscale free-surface flows. J. Comput. Phys. 2020, 418, 109609. [Google Scholar] [CrossRef]
- Audusse, E.; Bristeau, M.O.; Perthame, B.; Sainte-Marie, J. A multilayer Saint-Venant system with mass exchanges for shallow water flows. Derivation and numerical validation. ESAIM Math. Model. Numer. Anal. 2011, 45, 169–200. [Google Scholar] [CrossRef]
- Lee, H.S.; Shimoyama, T.; Popinet, S. Impacts of tides on tsunami propagation due to potential Nankai Trough earthquakes in the Seto Inland Sea, Japan. J. Geophys. Res. Oceans 2015, 120, 6865–6883. [Google Scholar] [CrossRef]
- Tomiczek, T.; Prasetyo, A.; Mori, N.; Yasuda, T.; Kennedy, A. Physical modelling of tsunami onshore propagation, peak pressures, and shielding effects in an urban building array. Coast. Eng. 2016, 117, 97–112. [Google Scholar] [CrossRef]
- Shimoyama, T.; Lee, H.S. Tsunami-Tide Interaction in the Seto Inland Sea, Japan. Coast. Eng. Proc. 2014, 1, 2. [Google Scholar] [CrossRef]
- Lee, H.S.; Komaguchi, T.; Yamamoto, A.; Hara, M. Wintertime Extreme Storm Waves in the East Sea: Estimation of Extreme Storm Waves and Wave-Structure Interaction Study in the Fushiki Port, Toyama Bay. J. Korean Soc. Coast. Ocean. Eng. 2013, 25, 335–347. [Google Scholar] [CrossRef]
- Kurganov, A.; Levy, D. Central-upwind schemes for the Saint-Venant system. Math. Model. Numer. Anal. 2002, 36, 397–425. [Google Scholar] [CrossRef]
- Bonneton, P.; Chazel, F.; Lannes, D.; Marche, F.; Tissier, M. A splitting approach for the fully nonlinear and weakly dispersive Green-Naghdi model. J. Comput. Phys. 2011, 230, 1479–1498. [Google Scholar] [CrossRef]
- Battershill, L.; Whittaker, C.N.; Lane, E.M.; Popinet, S.; White, J.D.L.; Power, W.L.; Nomikou, P. Numerical simulations of a fluidized granular flow entry into water: Insights into modeling tsunami generation by pyroclastic density currents. J. Geophys. Res. Solid Earth 2021, 126, e2021JB022855. [Google Scholar] [CrossRef]
- Hayward, M.W.; Whittaker, C.N.; Lane, E.M.; Power, W.L.; Popinet, S.; White, J.D.L. Multilayer modelling of waves generated by explosive subaqueous volcanism. Nat. Hazards Earth Syst. Sci. 2022, 22, 617–637. [Google Scholar] [CrossRef]
- van Hooft, J.A.; Popinet, S.; van Heerwaarden, C.C.; van der Linden, S.J.A.; de Roode, S.R.; van de Wiel, B.J.H. Towards Adaptive Grids for Atmospheric Boundary-Layer Simulations. Bound. Layer Meteorol. 2018, 167, 421–443. [Google Scholar] [CrossRef]
- Goseberg, N. Reduction of maximum tsunami run-up due to the interaction with beachfront development-Application of single sinusoidal waves. Nat. Hazards Earth Syst. Sci. 2013, 13, 2991–3010. [Google Scholar] [CrossRef]
- Papaioannou, G.; Efstratiadis, A.; Vasiliades, L.; Loukas, A.; Papalexiou, S.M.; Koukouvinos, A.; Tsoukalas, I.; Kossieris, P. An operational method for Flood Directive implementation in ungauged urban areas. Hydrology 2018, 5, 24. [Google Scholar] [CrossRef]
- Kalyanapu, A.J.; Burian, S.J.; Mcpherson, T.N. Effect of land use-based surface roughness on hydrologic model output. J. Spat. Hydrol. 2009, 9, 51. [Google Scholar]
- Cárdenas, G.; Catalán, P.A. Accelerating Tsunami Modeling for Evacuation Studies through Modification of the Manning Roughness Values. GeoHazards 2022, 3, 492–508. [Google Scholar] [CrossRef]
- Maruyama, Y.; Kitamura, K.; Yamazaki, F. Estimation of tsunami-inundated areas in Asahi City, Chiba Prefecture, after the 2011 Tohoku-oki earthquake. Earthq. Spectra 2013, 29, 201–217. [Google Scholar] [CrossRef]
- De Jong, H. River Flood Damage Assessment Using Ikonos Imagery; JRC: Ispra, Italy, 2001; Available online: https://www.researchgate.net/publication/40218937 (accessed on 4 January 2024).
- Gayer, G.; Leschka, S.; Nöhren, I.; Larsen, O.; Gänther, H. Tsunami inundation modelling based on detailed roughness maps of densely populated areas. Nat. Hazards Earth Syst. Sci. 2010, 10, 1679–1687. [Google Scholar] [CrossRef]
- Blaise, S.; St-Cyr, A. A dynamic hp-Adaptive discontinuous Galerkin method for shallow-water flows on the sphere with application to a global tsunami simulation. Mon. Weather Rev. 2012, 140, 978–996. [Google Scholar] [CrossRef][Green Version]
- Pons, K.; Ersoy, M. Adaptive Mesh Refinement Method. Part 1: Automatic Thresholding Based on a Distribution Function. 2019. Available online: https://hal.science/hal-01330679v2 (accessed on 4 January 2024).
- Pons, K.; Ersoy, M.; Golay, F.; Marcer, R. Adaptive Mesh Refinement Method. Part 2: Application to Tsunamis Propagation. 2019. Available online: https://hal.science/hal-01330680v3 (accessed on 4 January 2024).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Time Steps | Simulation Time (h) |
|---|---|---|
| SGN | 84,249 | 5.825 |
| SV | 16,060 | 0.93 |
| ML | 11,384 | 4.55 |
| ML_F | 33,522 | 12.94 |
| Type of the Grid | Refinement Level | Time Steps | Simulation Time (h) |
|---|---|---|---|
| Constant grid | 29 | 28,024 | 6.8 |
| AMR | 26 ≤ AMR ≤ 29 | 16,060 | 0.93 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aljber, M.; Lee, H.S.; Jeong, J.-S.; Cabrera, J.S. Tsunami Inundation Modelling in a Built-In Coastal Environment with Adaptive Mesh Refinement: The Onagawa Benchmark Test. J. Mar. Sci. Eng. 2024, 12, 177. https://doi.org/10.3390/jmse12010177
Aljber M, Lee HS, Jeong J-S, Cabrera JS. Tsunami Inundation Modelling in a Built-In Coastal Environment with Adaptive Mesh Refinement: The Onagawa Benchmark Test. Journal of Marine Science and Engineering. 2024; 12(1):177. https://doi.org/10.3390/jmse12010177
Chicago/Turabian StyleAljber, Morhaf, Han Soo Lee, Jae-Soon Jeong, and Jonathan Salar Cabrera. 2024. "Tsunami Inundation Modelling in a Built-In Coastal Environment with Adaptive Mesh Refinement: The Onagawa Benchmark Test" Journal of Marine Science and Engineering 12, no. 1: 177. https://doi.org/10.3390/jmse12010177
APA StyleAljber, M., Lee, H. S., Jeong, J.-S., & Cabrera, J. S. (2024). Tsunami Inundation Modelling in a Built-In Coastal Environment with Adaptive Mesh Refinement: The Onagawa Benchmark Test. Journal of Marine Science and Engineering, 12(1), 177. https://doi.org/10.3390/jmse12010177