

Three-Dimensional Prescribed Performance Tracking Control of UUV via PMPC and RBFNN-FTTSMC



Abstract
1. Introduction
- (1)
- To achieve complex prescribed performance tracking in MPPS scenarios, a novel PMPC guidance law is proposed, which enables the switch between soft and hard constraints in attitude control. This approach utilizes multiple parallel sub-controllers to handle different aspects of the control problem and optimizes the overall control performance. The novelty of the proposed controller lies in its combination of HMPC and SMPC. By integrating HMPC and SMPC, the strengths of both approaches are leveraged in the proposed controller. The inherent ability of HMPC to handle hard constraints ensures that the safety and critical requirements are met, while the incorporation of soft constraints through SMPC offers increased maneuverability and adaptability.
- (2)
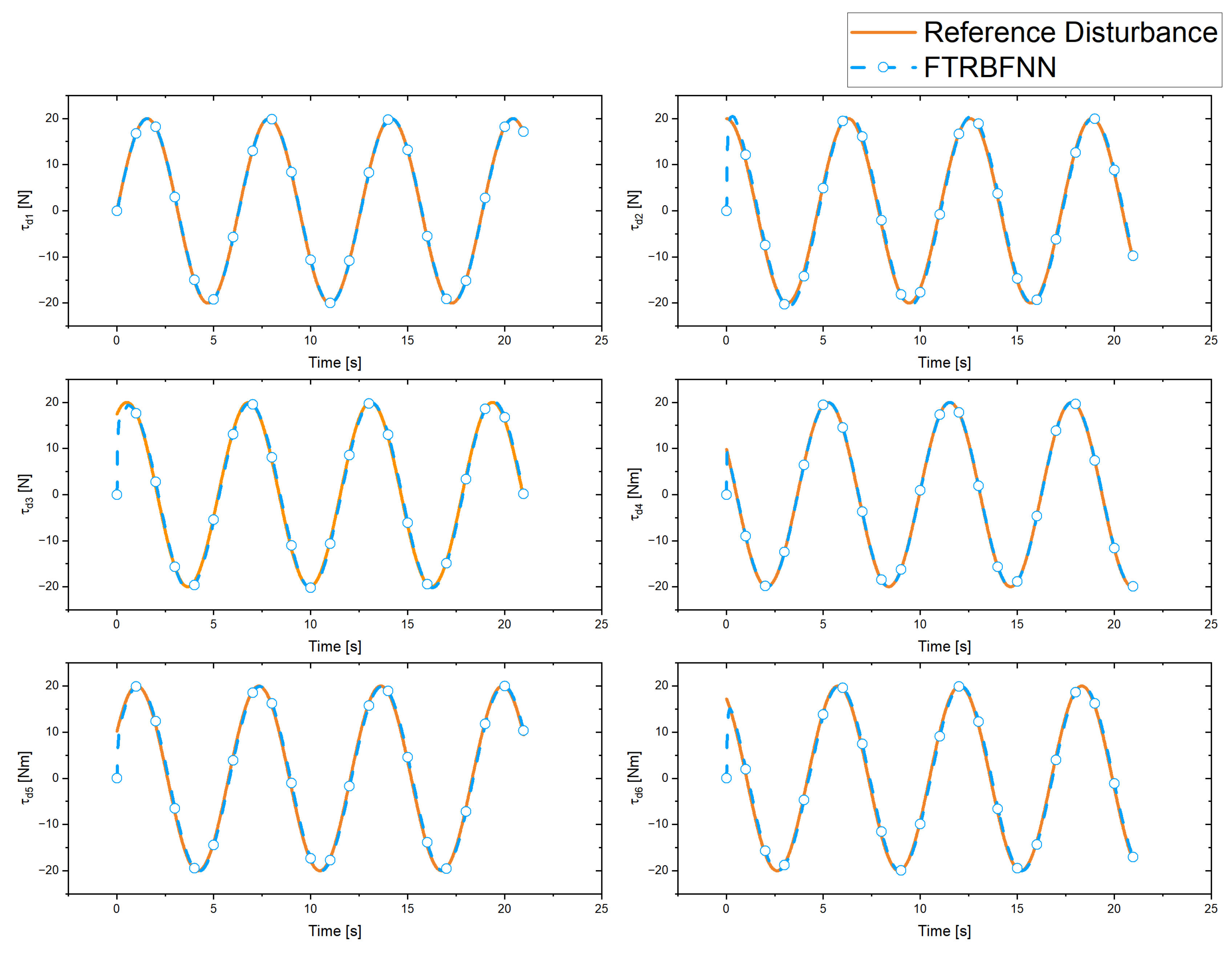
- Compared with the robust control based on traditional disturbance observers [43], the RBFNN-FTTSMC method enables fast disturbance estimation and finite-time convergence. This approach combines finite time radial basis function neural network disturbance observer (FTRBFDO) with the finite time terminal sliding mode control to achieve a more accurate and stable disturbance estimation. It can quickly estimate disturbances in real time, improving the overall tracking performance.
- (3)
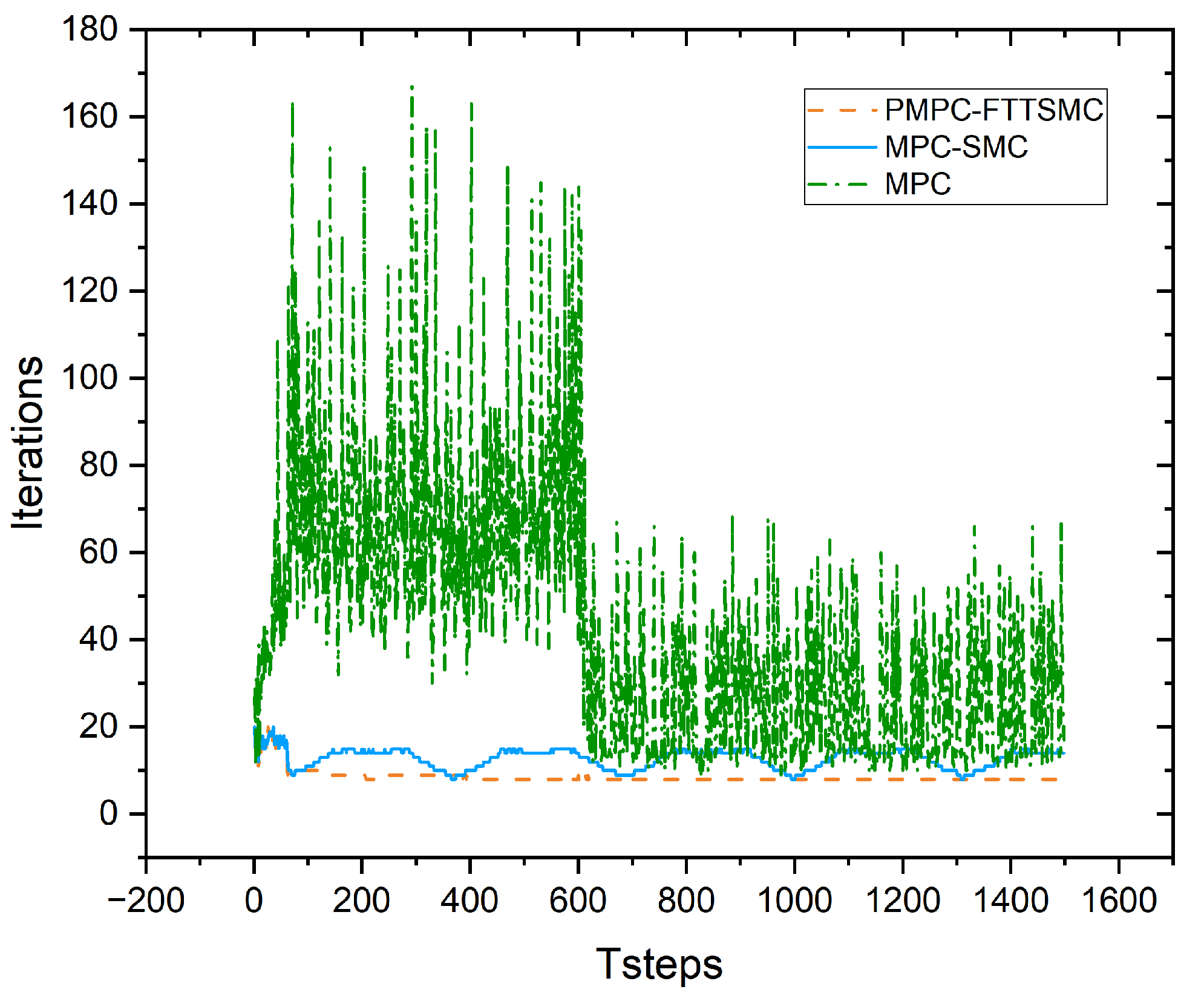
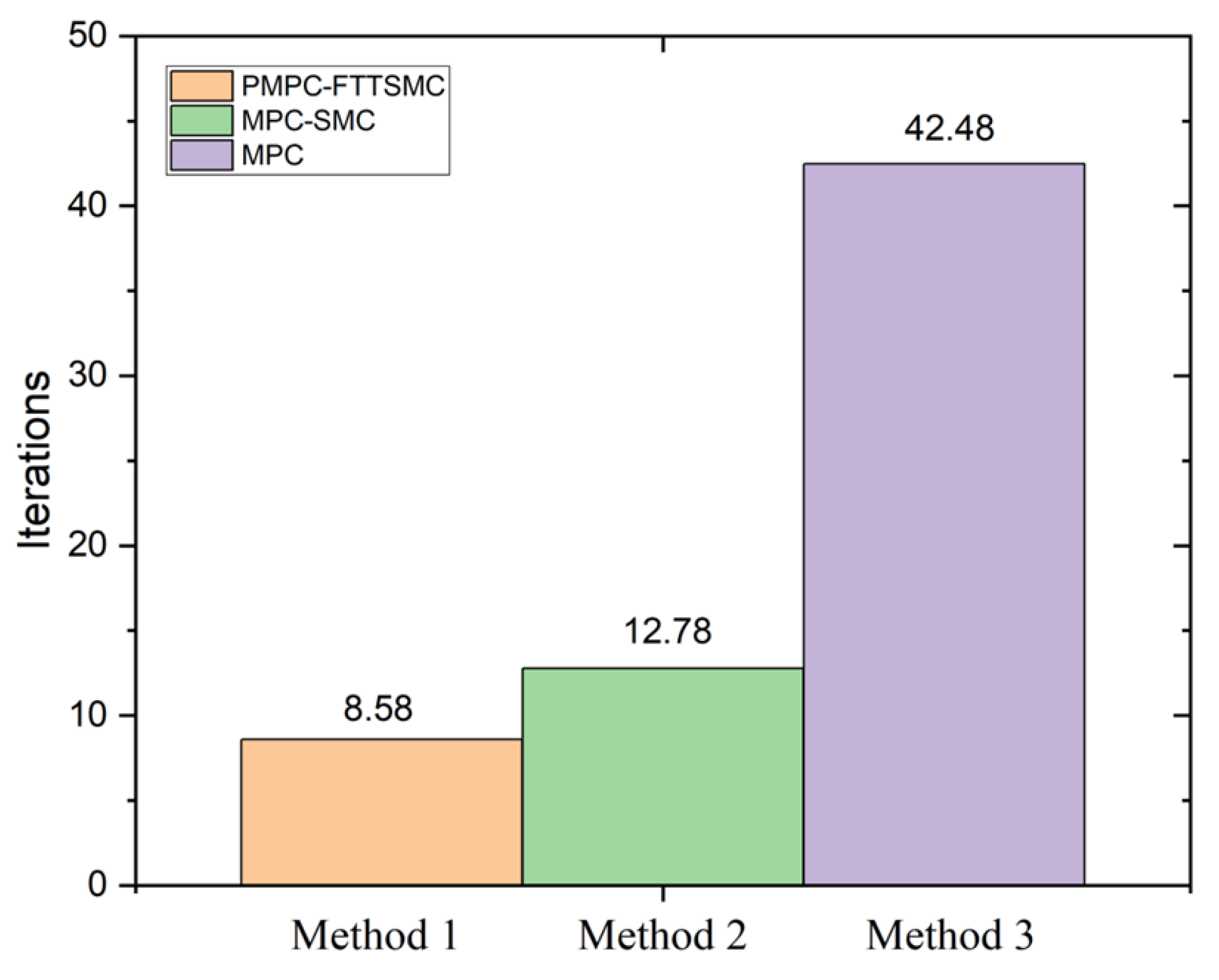
- Compared with the traditional MPC method, the proposed integration of PMPC and FTTSMC framework effectively addresses the issue of excessive iteration in traditional MPC, saving the required optimization time. Compared with traditional hybrid control schemes that combine MPC and robust control, the proposed method also solves the problem of constraint violation by using a finite time controller.
2. Modeling and Problem Formulation
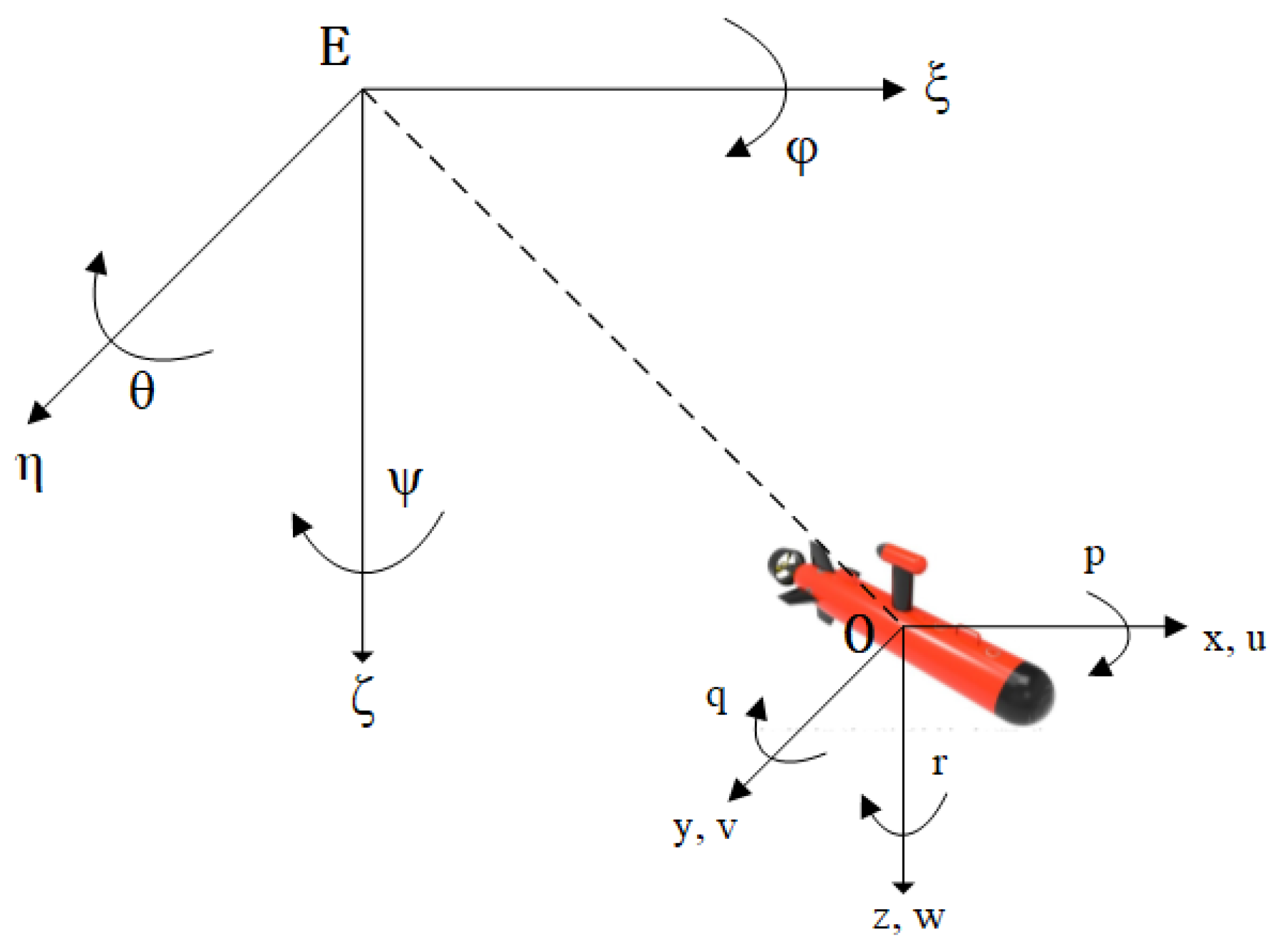
2.1. Frames of Reference
2.2. UUV Model
2.3. Problem Formulation
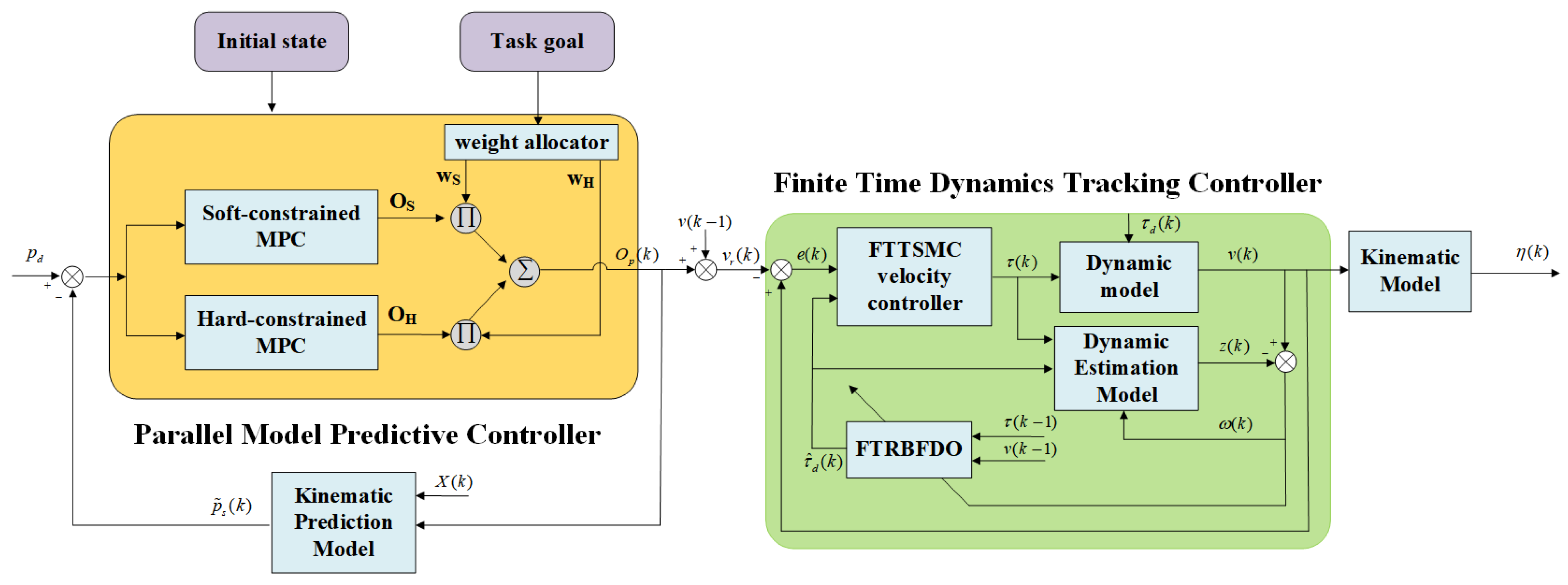
3. Controller Design
3.1. Kinematic Prediction Model
3.2. Parallel Model Predictive Controller
3.2.1. HMPC
3.2.2. SMPC
3.2.3. Weight Allocator
3.3. Dynamics Controller Design
3.3.1. Finite-Time RBF Disturbance Observer
3.3.2. Finite-Time Terminal Slide Mode Controller
3.3.3. Stability Analysis
- Step 1: Achieving Sliding Mode in Finite Time
- Step 2: Velocity Tracking Error Convergence in Finite Time
3.4. Implementation of the Tracking Control Algorithm
3.4.1. Detailed Implementation Process
| Algorithm 1 Three-dimensional Trajectory Tracking Algorithm. |
| Input: (initial state), (search phase), (transition phase), (dock ing phase), (input constrains), (state constrains), (predict horizon), (control horizon)
begin: |
|
1. ← 2. ← 3. while do 4. Calculate according to Equations (18)–(22) 5. if then 6. Calculate the output of SMPC utilizing Equation (28) 7. else if then 8. Calculate the output of SMPC and HMPC according to Equations (27) and (28) 9. Calculate the output of weight allocator utilizing Equation (29) 10. else 11. Calculate the output of HMPC utilizing Equation (27) 12. end if 13. Calculate the output of kinematic controller utilizing Equation (23) 14. Calculate the output of disturbance observer according to Equation (33) 15. Calculate the terminal sliding mode surface utilizing Equations (35)–(40) 16. Calculate the desired torque according to Equations (41) and (42) 17. Implement to the UUV 18. ← 19. Update the weight matrix according to Proposition 1 20. Update the State of UUV 21. end while end |
3.4.2. Challenges in Real-World Deployment of Algorithm
4. Simulation
4.1. Simulation Preparation
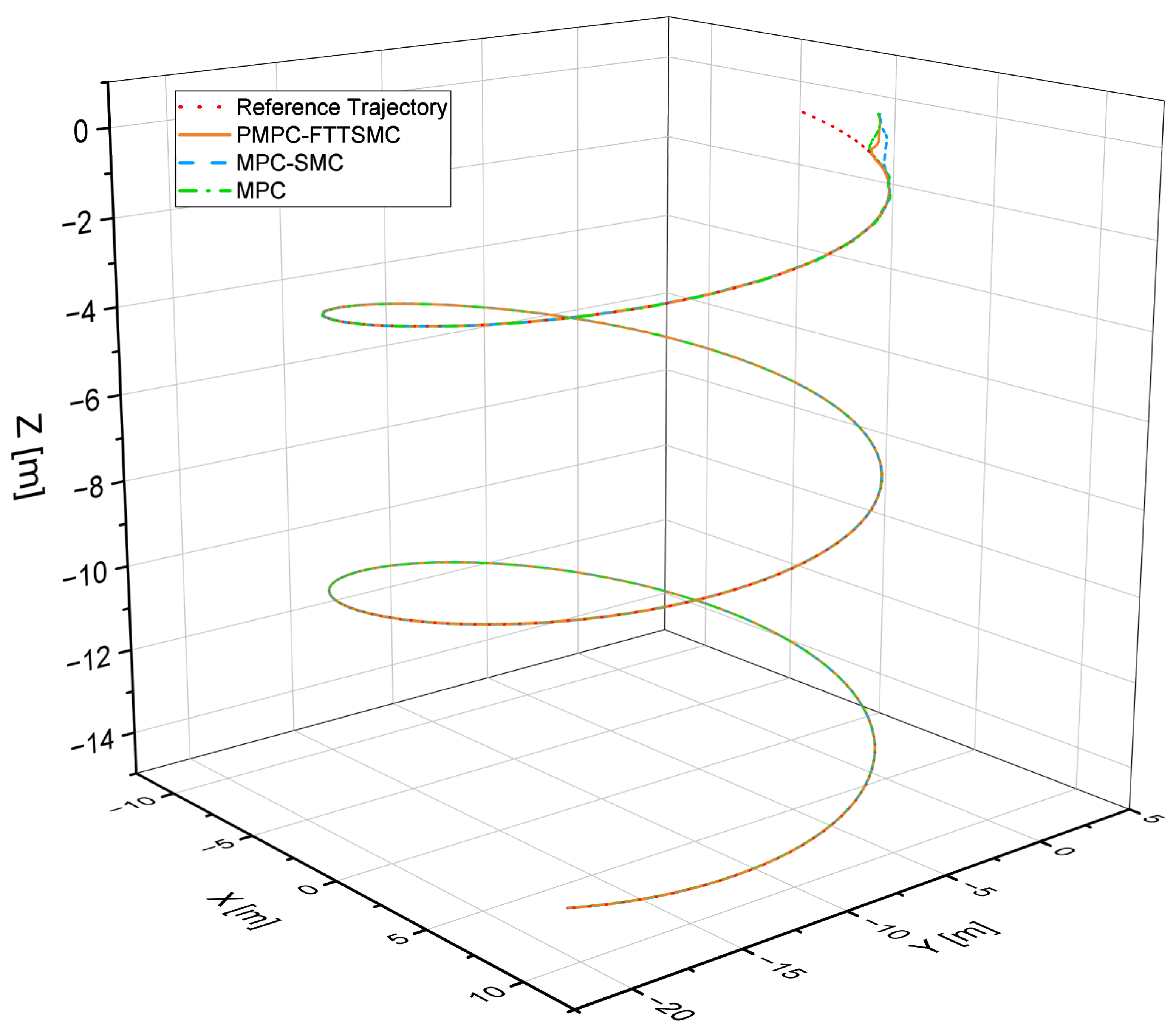
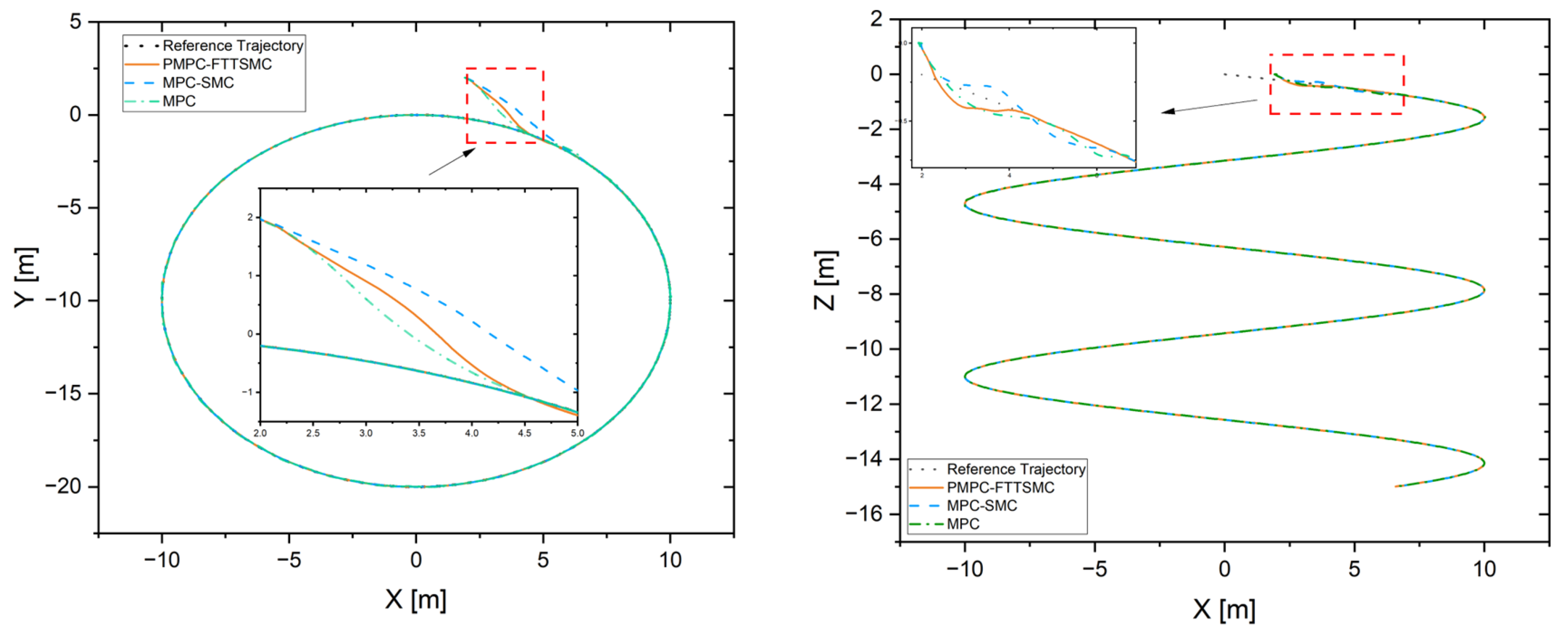
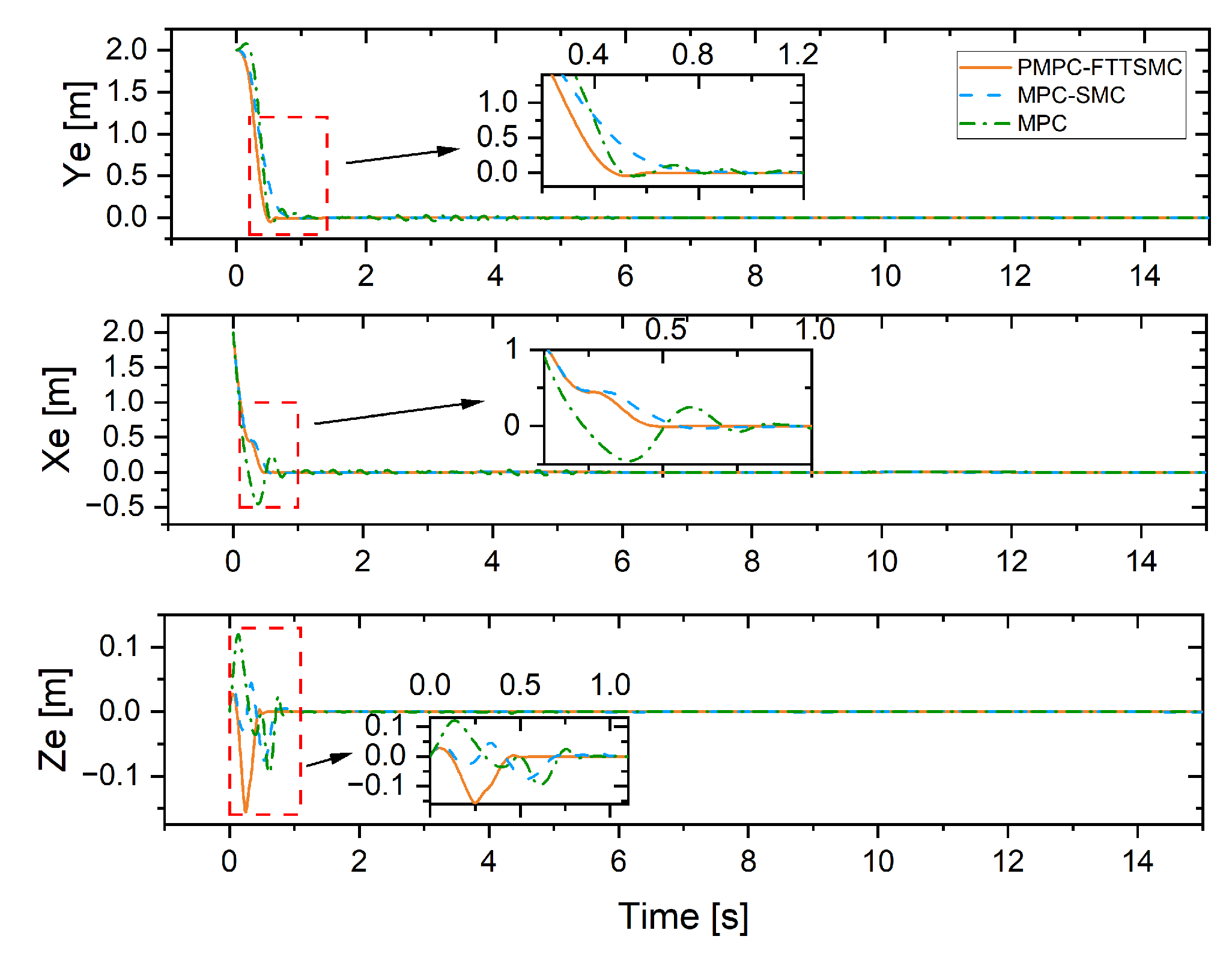
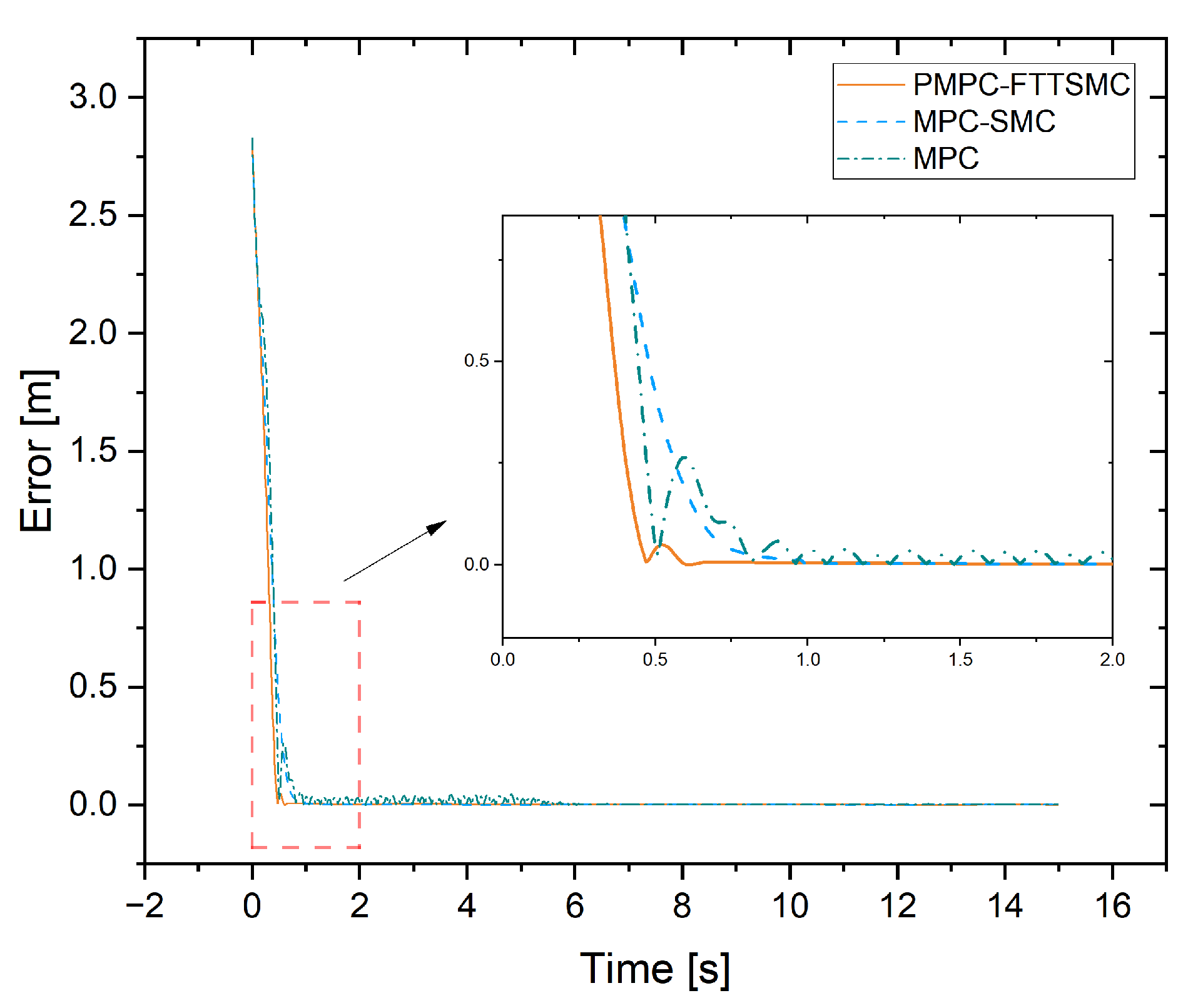
4.2. Case 1: Spiral Trajectory Tracking
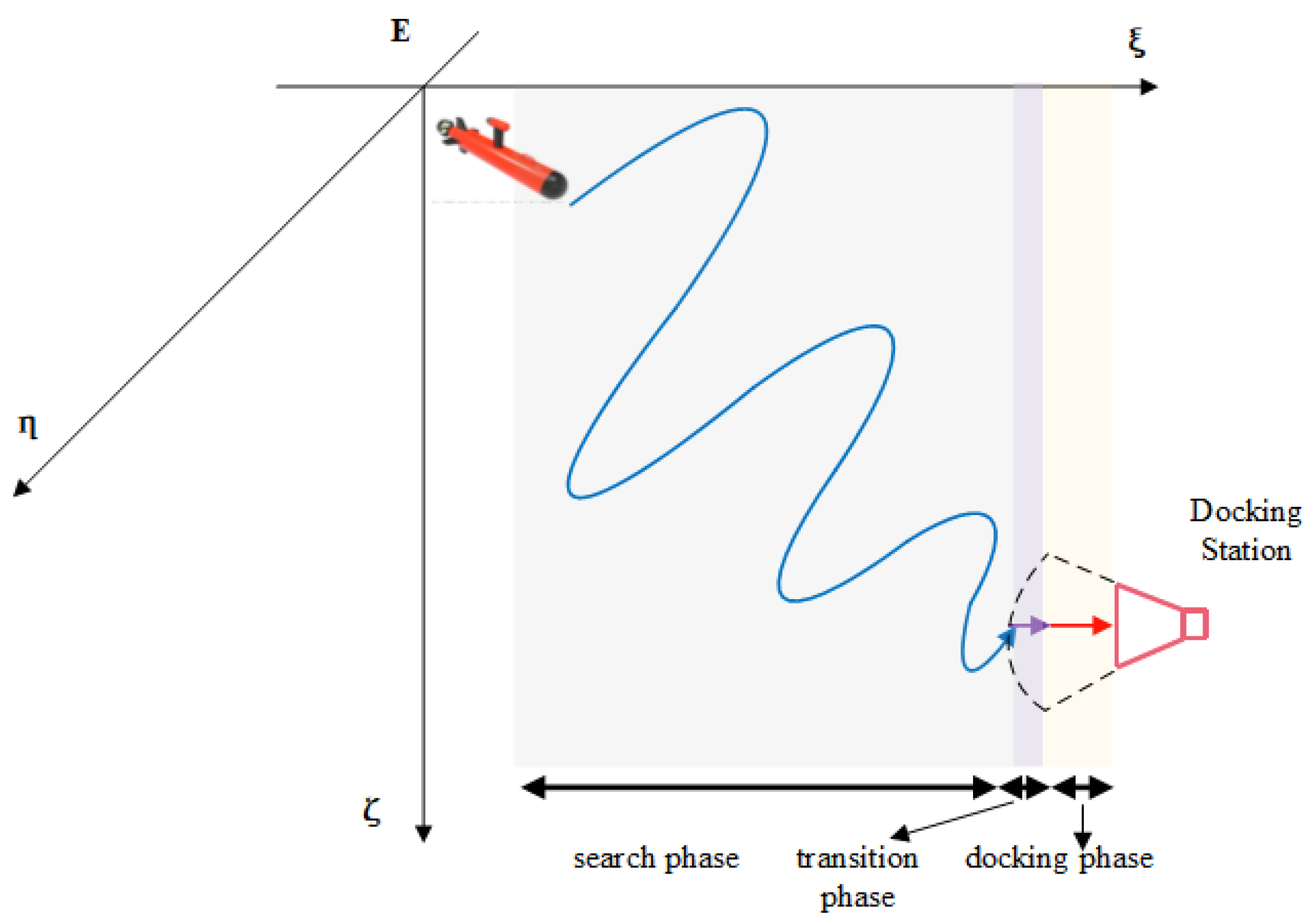
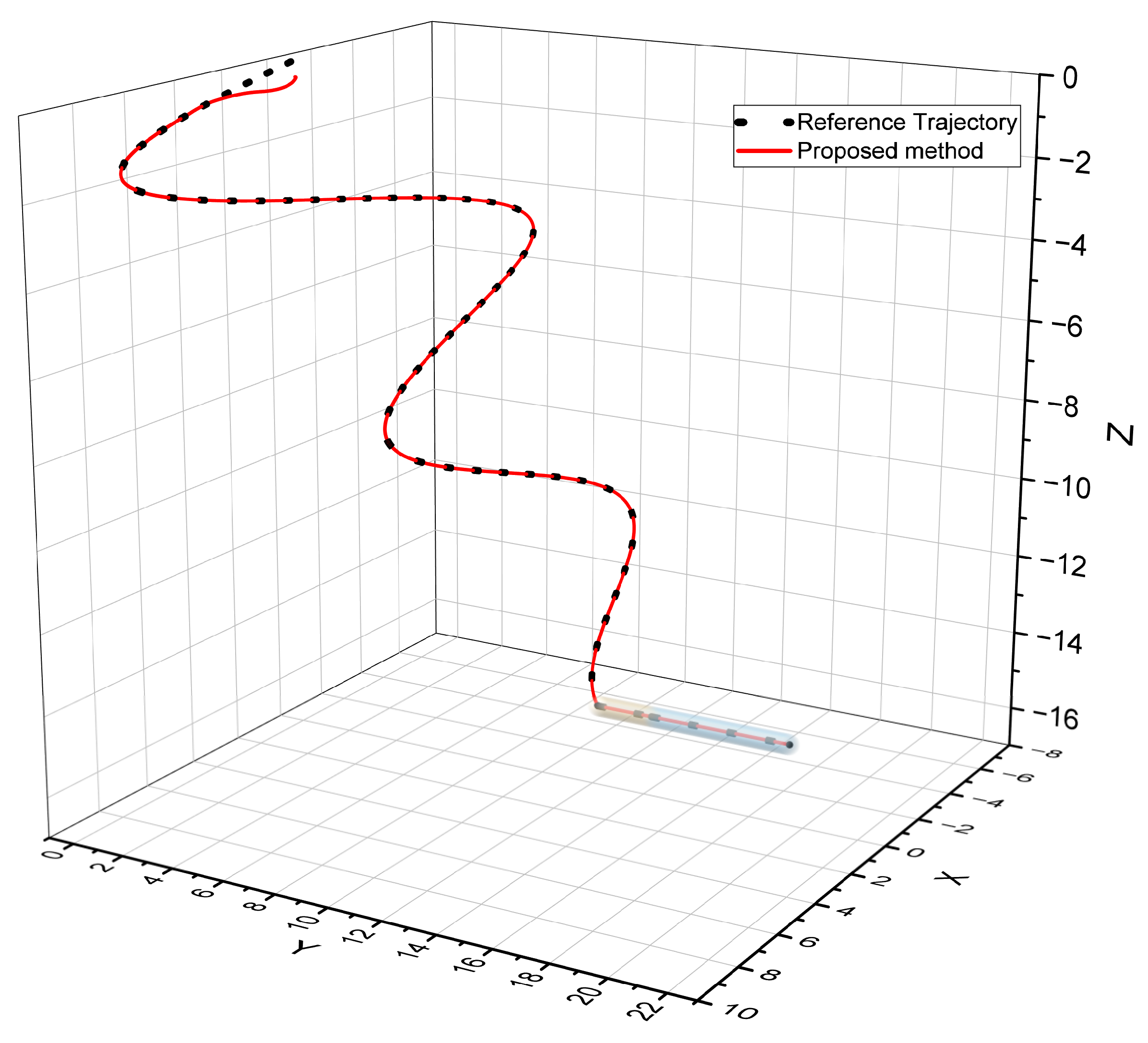
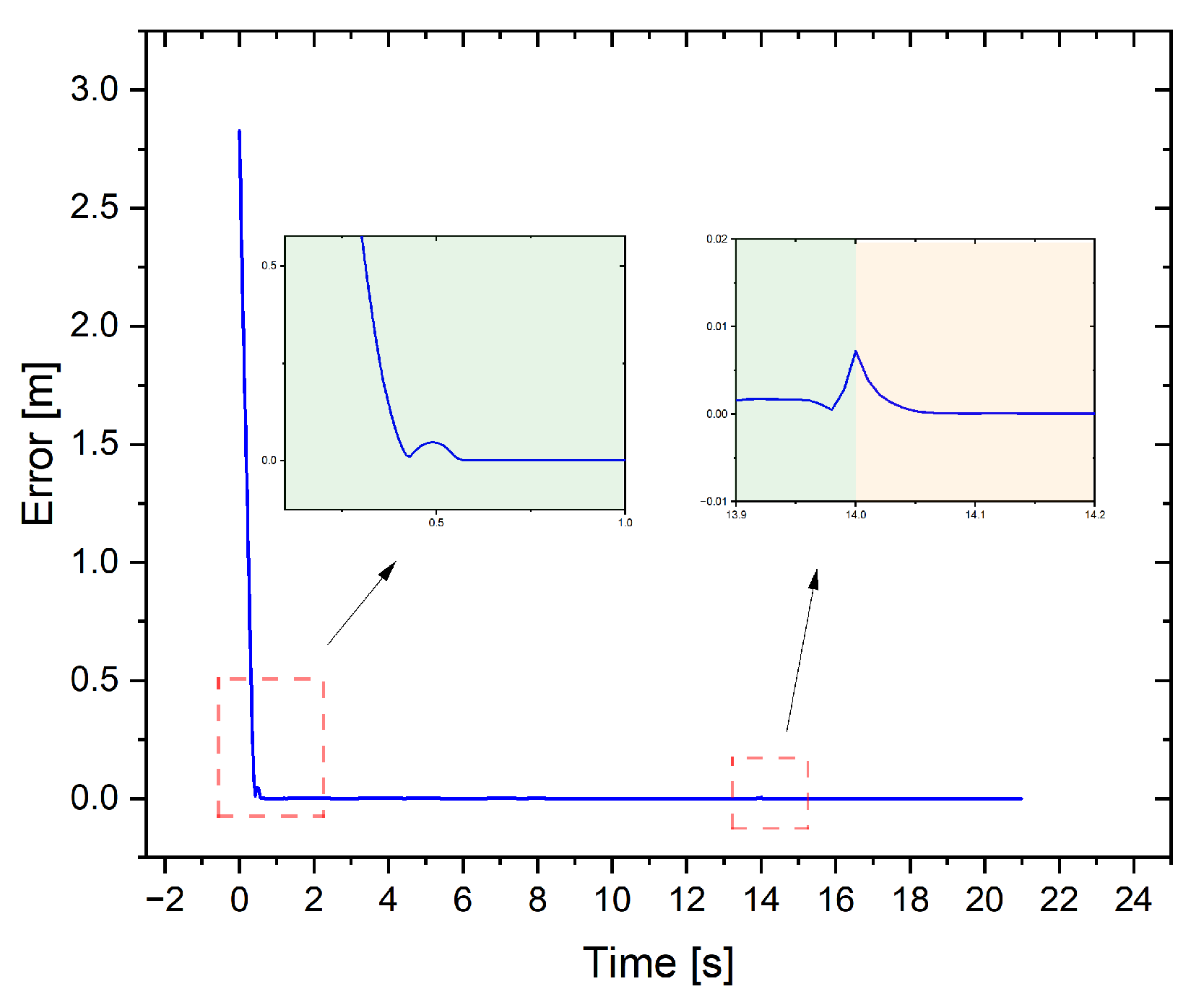
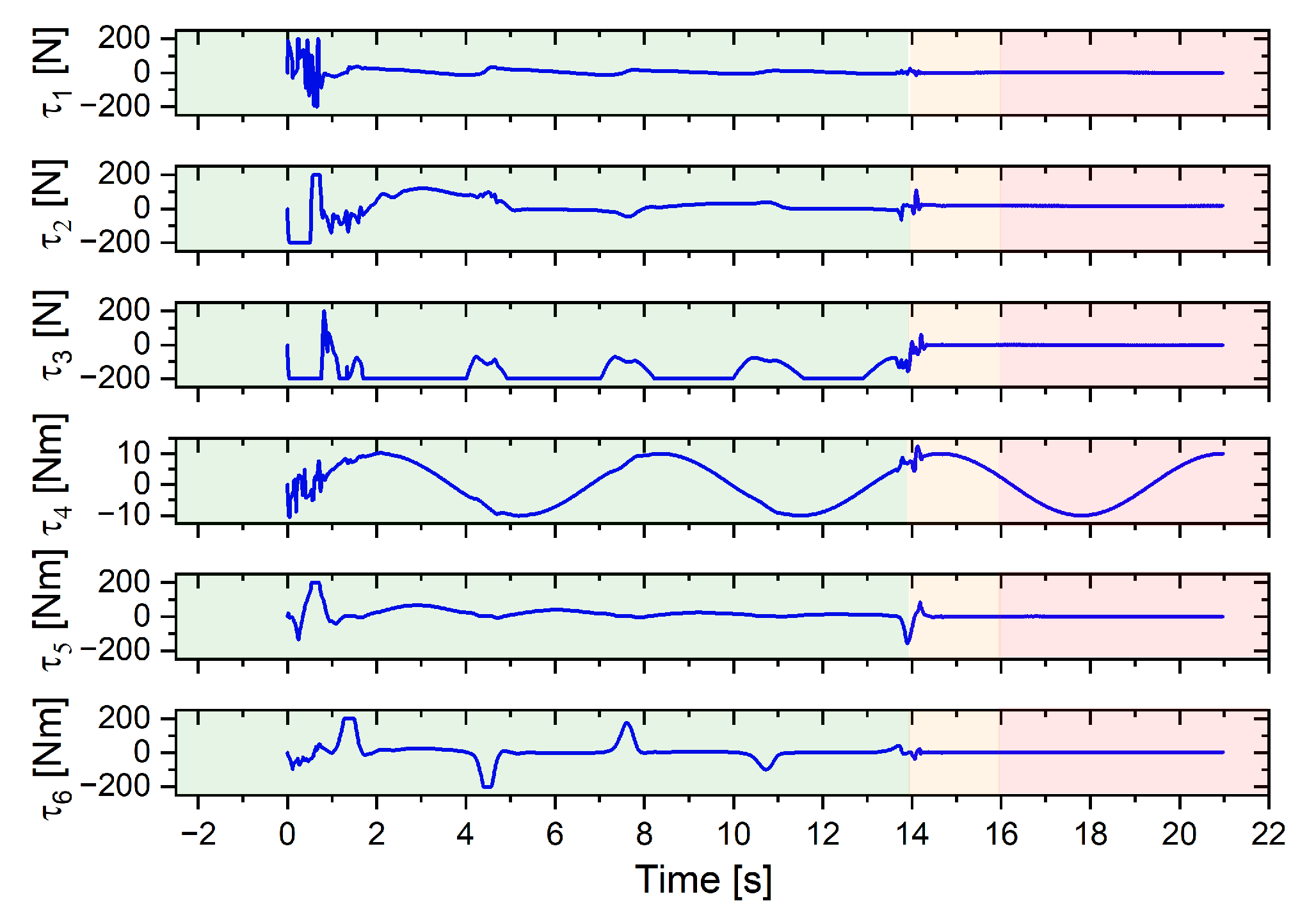
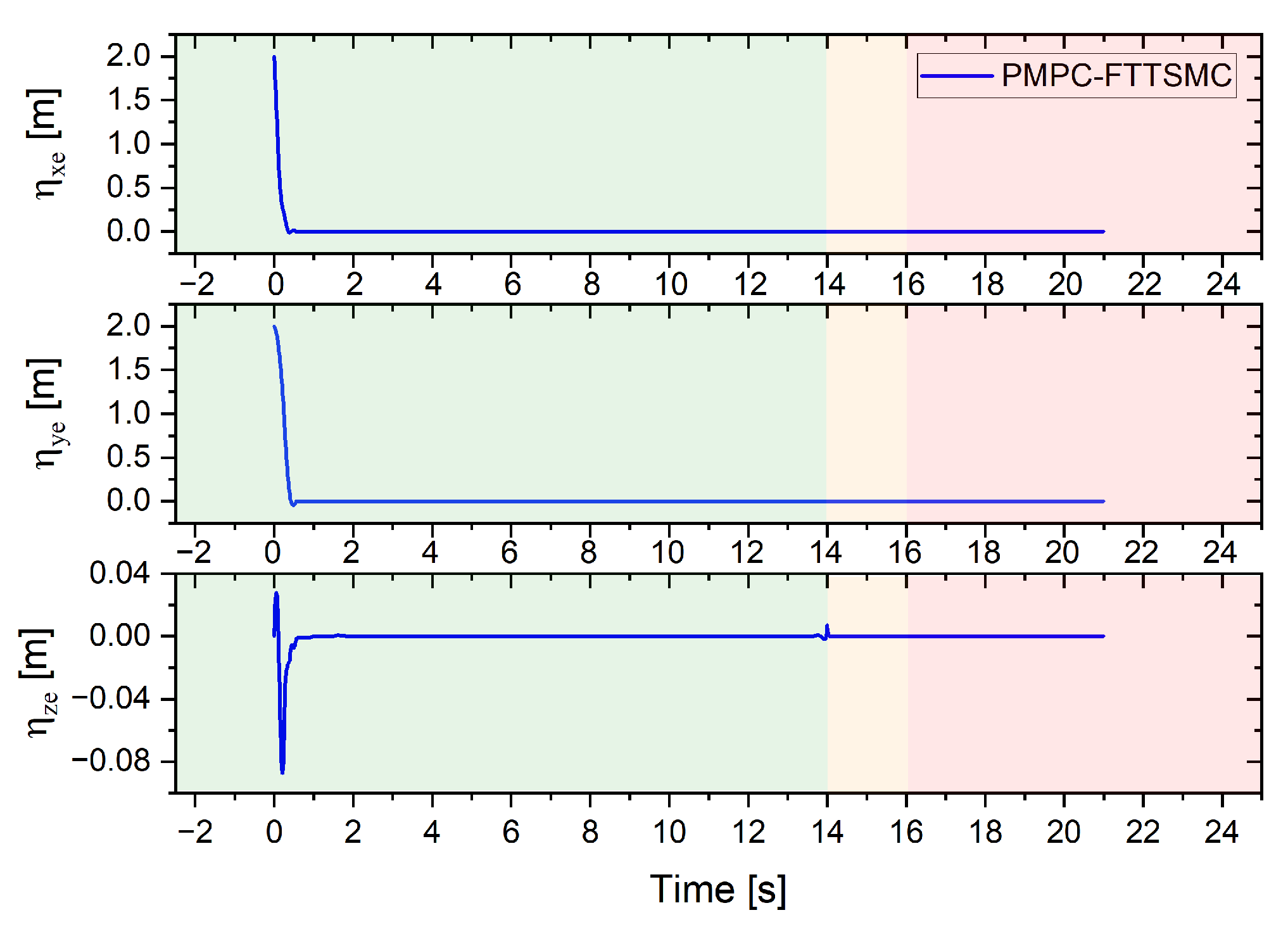
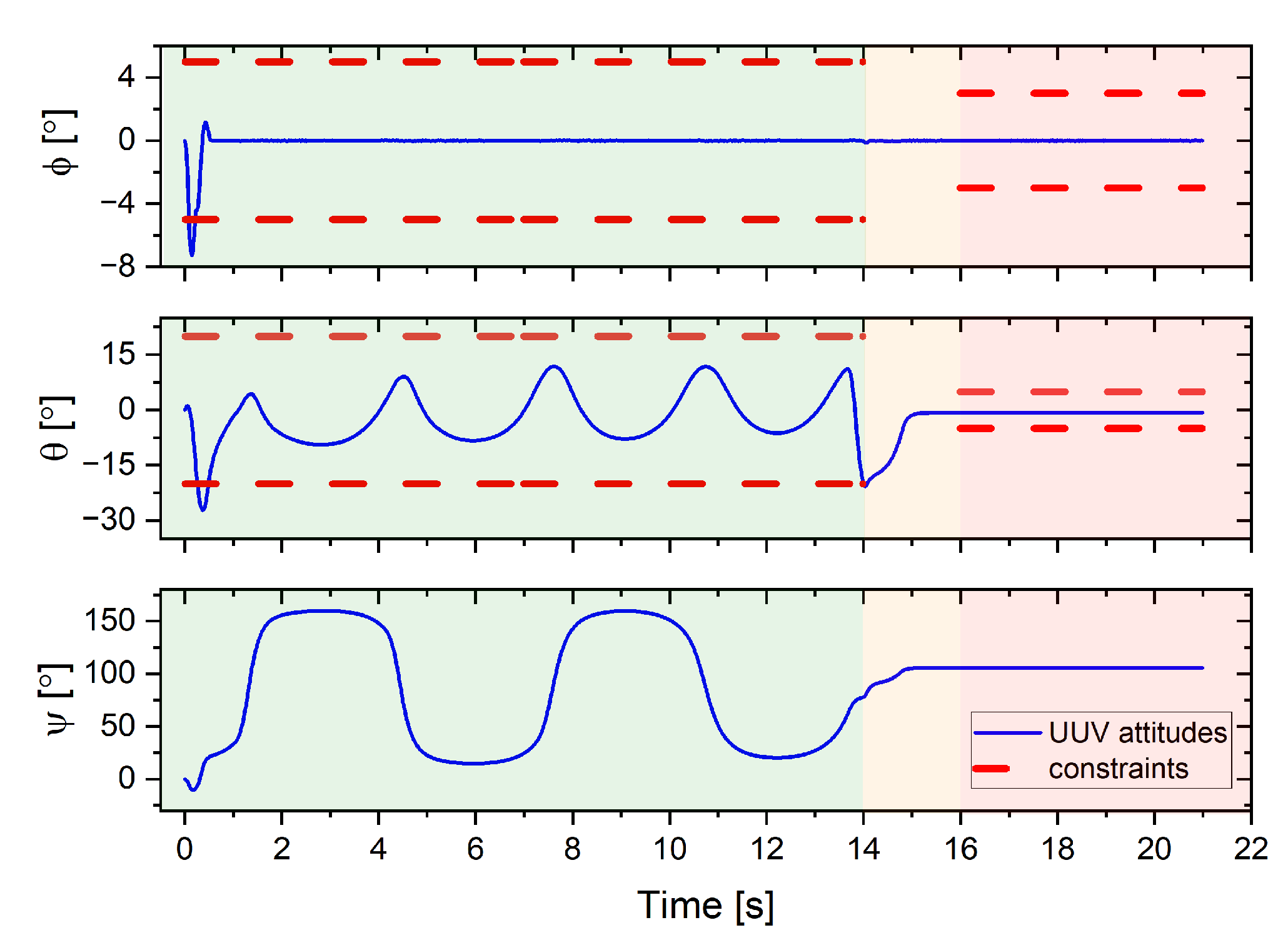
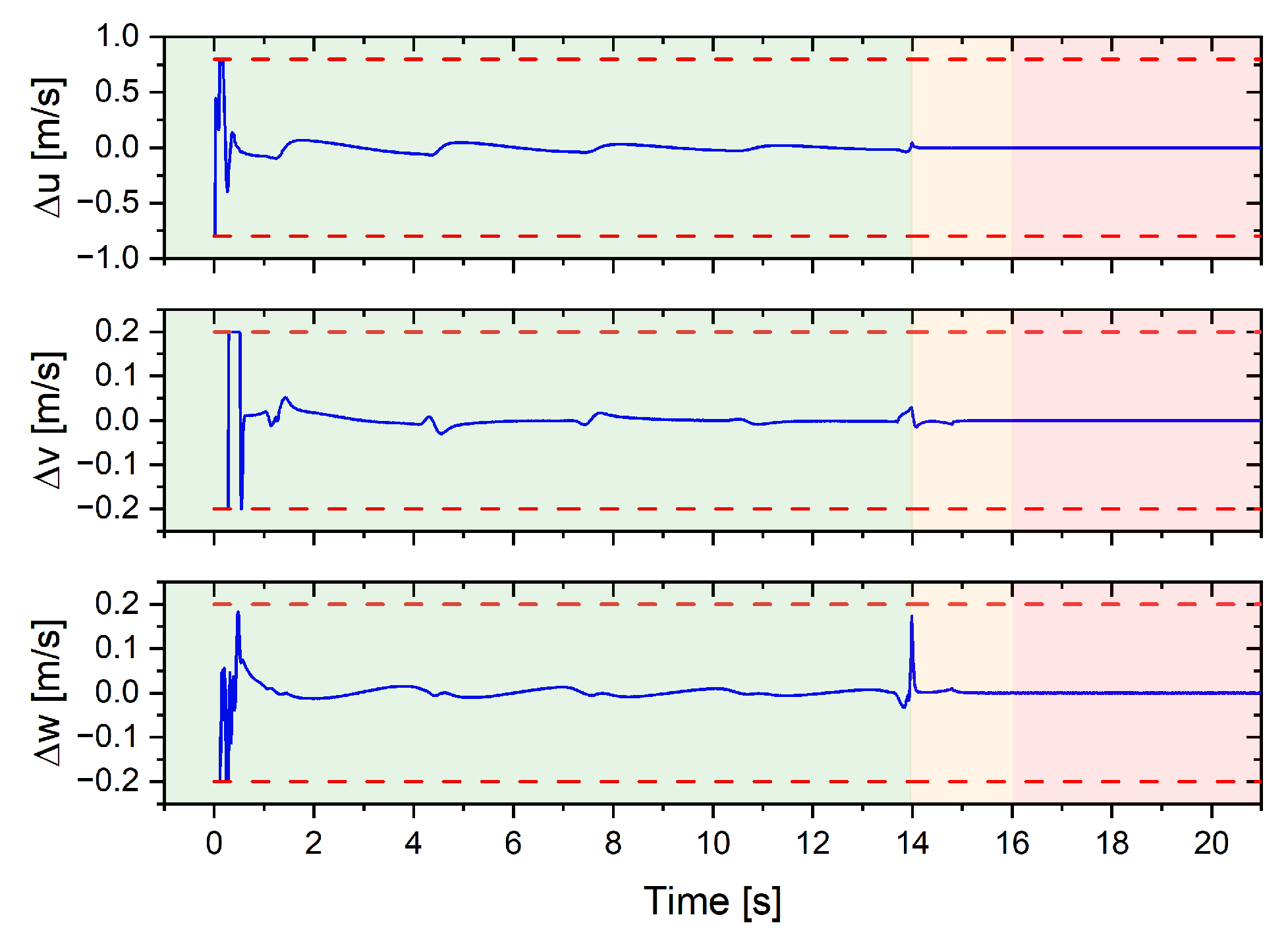
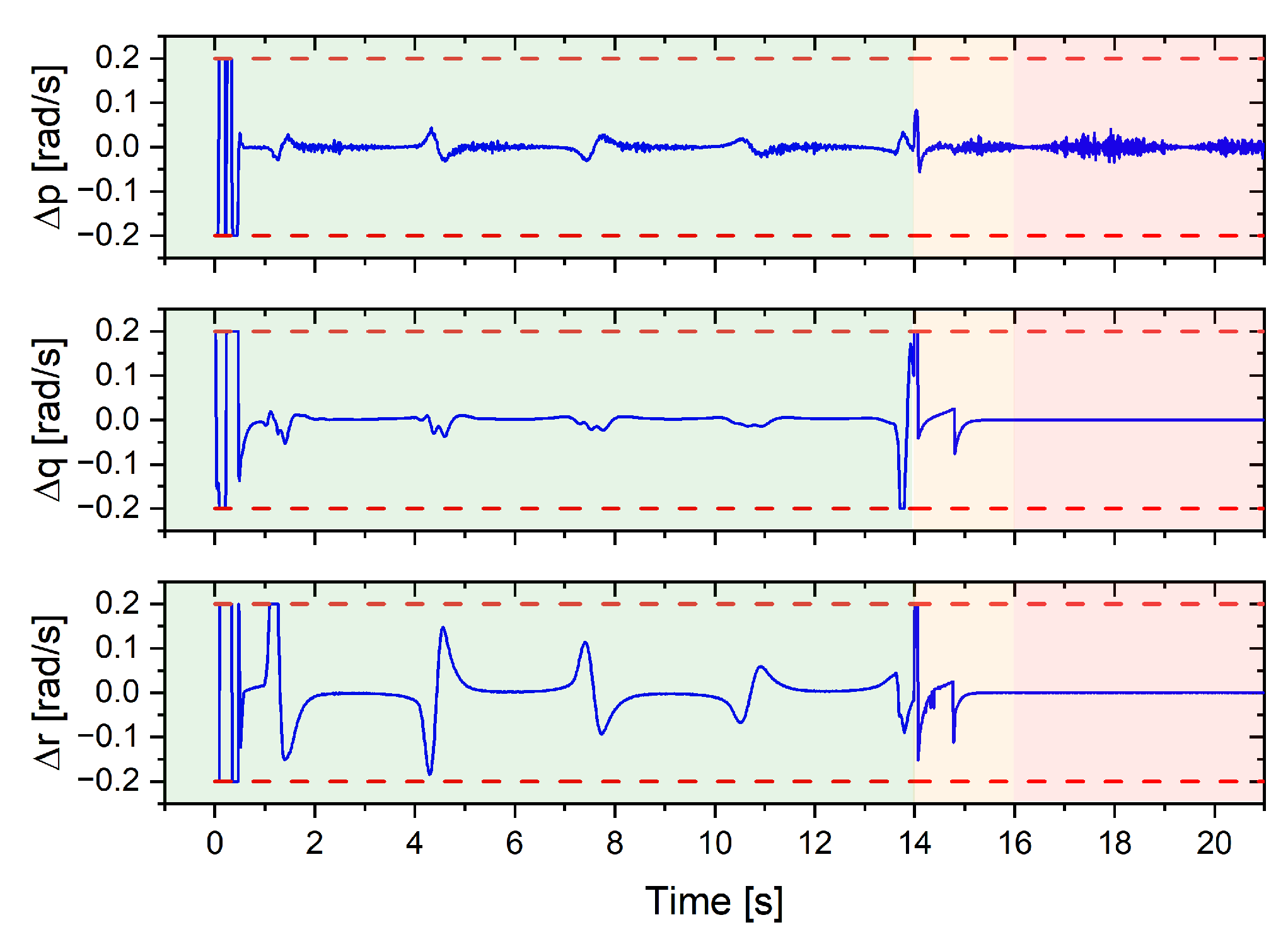
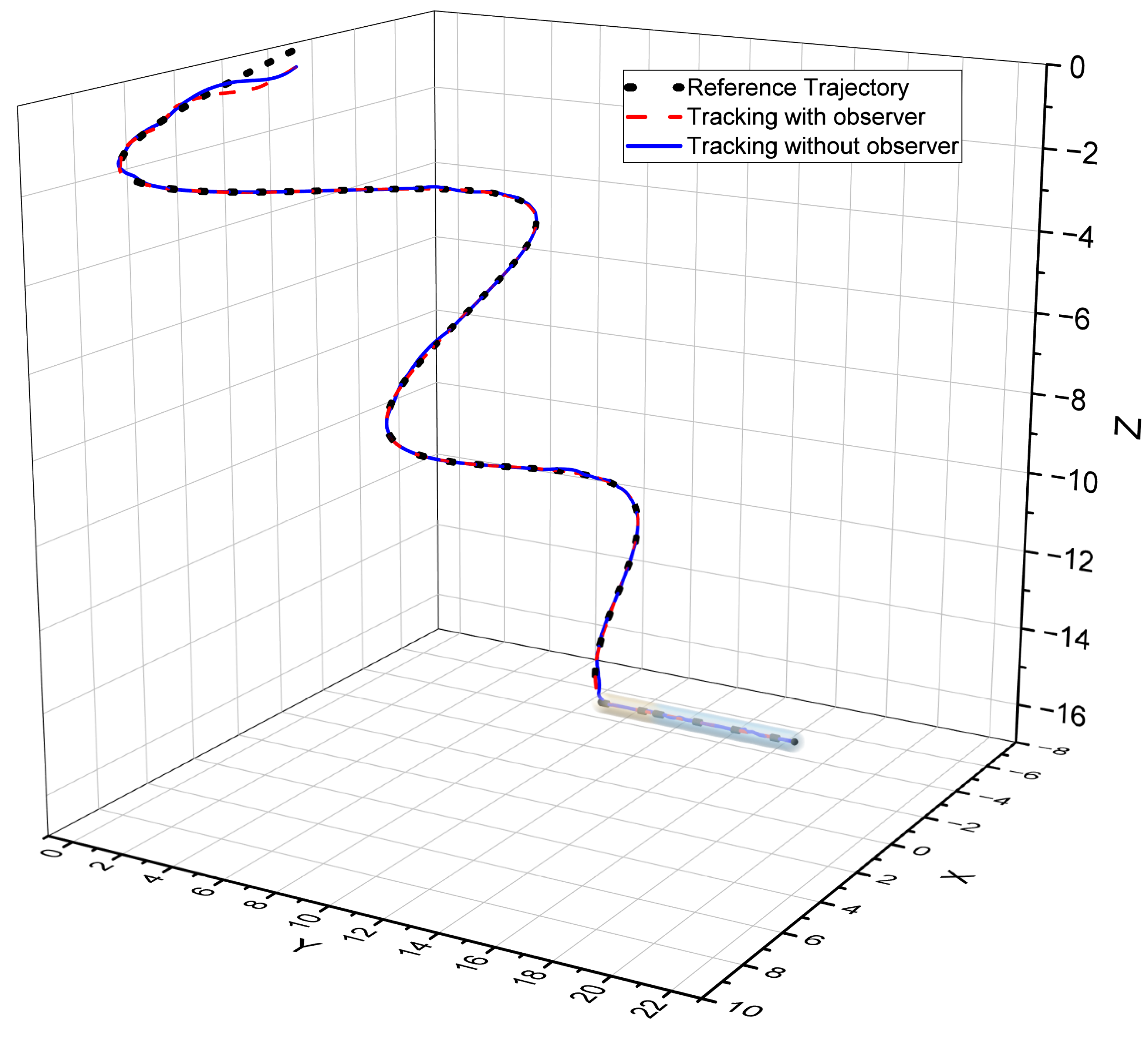
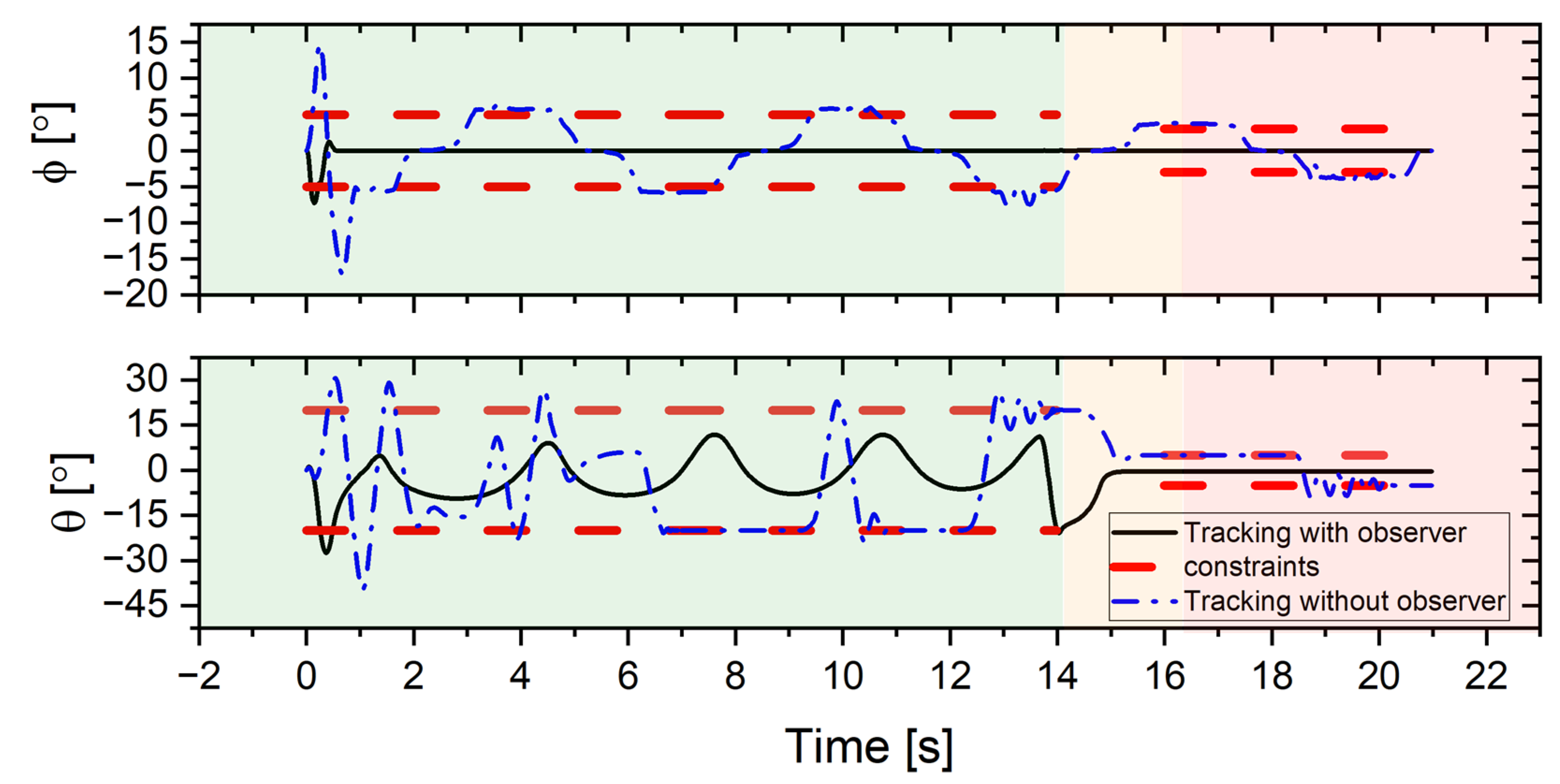
4.3. Case 2: Search-and-Docking Mission
4.4. Discussion of Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Bruzzone, G.; Ferretti, R.; Odetti, A. Unmanned Marine Vehicles. J. Mar. Sci. Eng. 2021, 9, 257. [Google Scholar] [CrossRef]
- Stateczny, A.; Gronska-Sledz, D.; Motyl, W. Precise Bathymetry as a Step Towards Producing Bathymetric Electronic Navigational Charts for Comparative (Terrain Reference) Navigation. J. Navig. 2019, 72, 1623–1632. [Google Scholar] [CrossRef]
- Marini, S.; Gjeci, N.; Govindaraj, S.; But, A.; Sportich, B.; Ottaviani, E.; Márquez, F.P.G.; Bernalte Sanchez, P.J.; Pedersen, J.; Clausen, C.V. Enduruns: An Integrated and Flexible Approach for Seabed Survey through Autonomous Mobile Vehicles. J. Mar. Sci. Eng. 2020, 8, 633. [Google Scholar] [CrossRef]
- Kim, J. Cooperative Localisation for Deep-Sea Exploration Using Multiple Unmanned Underwater Vehicles. IET Radar Sonar Navig. 2020, 14, 1244–1248. [Google Scholar] [CrossRef]
- Ryu, J.H. Prototyping a Low-Cost Open-Source Autonomous Unmanned Surface Vehicle for Real-Time Water Quality Monitoring and Visualization. Hardwarex 2022, 12, e369. [Google Scholar] [CrossRef]
- González-García, J.; Gómez-Espinosa, A.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Cuan-Urquizo, E.; Escobedo Cabello, J.A. Experimental Validation of a Model-Free High-Order Sliding Mode Controller with Finite-Time Convergence for Trajectory Tracking of Autonomous Underwater Vehicles. Sensors 2022, 22, 488. [Google Scholar] [CrossRef] [PubMed]
- Manzanilla, A.; Ibarra, E.; Salazar, S.; Zamora, Á.E.; Lozano, R.; Munoz, F. Super-Twisting Integral Sliding Mode Control for Trajectory Tracking of an Unmanned Underwater Vehicle. Ocean. Eng. 2021, 234, 109164. [Google Scholar] [CrossRef]
- Kim, J.H.; Yoo, S.J. Distributed Event-Triggered Adaptive Output-Feedback Formation Tracking of Uncertain Underactuated Underwater Vehicles in Three-Dimensional Space. Appl. Math. Comput. 2022, 424, 127046. [Google Scholar] [CrossRef]
- Li, D.; Du, L. Auv Trajectory Tracking Models and Control Strategies: A Review. J. Mar. Sci. Eng. 2021, 9, 1020. [Google Scholar] [CrossRef]
- Gutnik, Y.; Avni, A.; Treibitz, T.; Groper, M. On the Adaptation of an Auv Into a Dedicated Platform for Close Range Imaging Survey Missions. J. Mar. Sci. Eng. 2022, 10, 974. [Google Scholar] [CrossRef]
- Cervantes, J.; Yu, W.; Salazar, S.; Chairez, I.; Lozano, R. Output Based Backstepping Control for Trajectory Tracking of an Autonomous Underwater Vehicle. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016. [Google Scholar]
- Liang, X.; Wan, L.; Blake, J.I.; Shenoi, R.A.; Townsend, N. Path Following of an Underactuated Auv Based On Fuzzy Backstepping Sliding Mode Control. Int. J. Adv. Robot. Syst. 2016, 13, 122. [Google Scholar] [CrossRef]
- Yu, C.; Xiang, X.; Wilson, P.A.; Zhang, Q. Guidance-Error-Based Robust Fuzzy Adaptive Control for Bottom Following of a Flight-Style Auv with Saturated Actuator Dynamics. IEEE Trans. Cybern. 2019, 50, 1887–1899. [Google Scholar] [CrossRef]
- Li, X.; Liu, Y. A New Fuzzy Smc Control Approach to Path Tracking of Autonomous Underwater Vehicles with Mismatched Disturbances. In Proceedings of the OCEANS 2022-Chennai, Chennai, India, 21–24 February 2022. [Google Scholar]
- Rodriguez, J.; Castañeda, H.; Gordillo, J.L. Design of an Adaptive Sliding Mode Control for a Micro-Auv Subject to Water Currents and Parametric Uncertainties. J. Mar. Sci. Eng. 2019, 7, 445. [Google Scholar] [CrossRef]
- Londhe, P.S.; Patre, B.M. Adaptive Fuzzy Sliding Mode Control for Robust Trajectory Tracking Control of an Autonomous Underwater Vehicle. Intell. Serv. Robot. 2019, 12, 87–102. [Google Scholar] [CrossRef]
- Chu, Z.; Xiang, X.; Zhu, D.; Luo, C.; Xie, D. Adaptive Trajectory Tracking Control for Remotely Operated Vehicles Considering Thruster Dynamics and Saturation Constraints. Isa Trans. 2020, 100, 28–37. [Google Scholar] [CrossRef]
- Barreno, P.; Parras, J.; Zazo, S. An Efficient Underwater Navigation Method Using Mpc with Unknown Kinematics and Non-Linear Disturbances. J. Mar. Sci. Eng. 2023, 11, 710. [Google Scholar] [CrossRef]
- Lakhekar, G.V.; Waghmare, L.M.; Roy, R.G. Disturbance Observer-Based Fuzzy Adapted S-Surface Controller for Spatial Trajectory Tracking of Autonomous Underwater Vehicle. IEEE Trans. Intell. Veh. 2019, 4, 622–636. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Wang, W.; Xu, G.; Xiang, X.; Li, Y. Optimal Robust Trajectory Tracking Control of a X-Rudder Auv with Velocity Sensor Failures and Uncertainties. Ocean. Eng. 2020, 198, 106949. [Google Scholar] [CrossRef]
- Gan, W.; Zhu, D.; Ji, D. Qpso-Model Predictive Control-Based Approach to Dynamic Trajectory Tracking Control for Unmanned Underwater Vehicles. Ocean. Eng. 2018, 158, 208–220. [Google Scholar] [CrossRef]
- Ahmad, S.; Uppal, A.A.; Azam, M.R.; Iqbal, J. Chattering Free Sliding Mode Control and State Dependent Kalman Filter Design for Underground Gasification Energy Conversion Process. Electronics 2023, 12, 876. [Google Scholar] [CrossRef]
- Yu, H.; Guo, C.; Yan, Z. Globally Finite-Time Stable Three-Dimensional Trajectory-Tracking Control of Underactuated Uuvs. Ocean. Eng. 2019, 189, 106329. [Google Scholar] [CrossRef]
- Pan, J.; Liu, J.; Yu, J. Path-Following Control of an Amphibious Robotic Fish Using Fuzzy-Linear Model Predictive Control Approach. In Proceedings of the 2020 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 13–16 October 2020. [Google Scholar]
- Khodayari, M.H.; Balochian, S. Modeling and Control of Autonomous Underwater Vehicle (Auv) in Heading and Depth Attitude Via Self-Adaptive Fuzzy Pid Controller. J. Mar. Sci. Technol. 2015, 20, 559–578. [Google Scholar] [CrossRef]
- Sun, B.; Gan, W.; Zhu, D.; Zhang, W.; Yang, S.X. A Model Predictive Based Uuv Control Design From Kinematic to Dynamic Tracking Control. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017. [Google Scholar]
- von Ellenrieder, K.D. Dynamic Surface Control of Trajectory Tracking Marine Vehicles with Actuator Magnitude and Rate Limits. Automatica 2019, 105, 433–442. [Google Scholar] [CrossRef]
- Cui, R.; Chen, L.; Yang, C.; Chen, M. Extended State Observer-Based Integral Sliding Mode Control for an Underwater Robot with Unknown Disturbances and Uncertain Nonlinearities. IEEE Trans. Ind. Electron. 2017, 64, 6785–6795. [Google Scholar] [CrossRef]
- Rojsiraphisal, T.; Mobayen, S.; Asad, J.H.; Vu, M.T.; Chang, A.; Puangmalai, J. Fast Terminal Sliding Control of Underactuated Robotic Systems Based On Disturbance Observer with Experimental Validation. Mathematics 2021, 9, 1935. [Google Scholar] [CrossRef]
- He, S.; Dai, S.; Zhao, Z.; Zou, T. Uncertainty and Disturbance Estimator-Based Distributed Synchronization Control for Multiple Marine Surface Vehicles with Prescribed Performance. Ocean. Eng. 2022, 261, 111867. [Google Scholar] [CrossRef]
- Shen, Z.; Wang, Q.; Dong, S.; Yu, H. Prescribed Performance Dynamic Surface Control for Trajectory-Tracking of Unmanned Surface Vessel with Input Saturation. Appl. Ocean. Res. 2021, 113, 102736. [Google Scholar] [CrossRef]
- Kim, J.H.; Yoo, S.J. Adaptive Event-Triggered Control Strategy for Ensuring Predefined Three-Dimensional Tracking Performance of Uncertain Nonlinear Underactuated Underwater Vehicles. Mathematics 2021, 9, 137. [Google Scholar] [CrossRef]
- Liang, H.; Fu, Y.; Gao, J.; Cao, H. Finite-Time Velocity-Observed Based Adaptive Output-Feedback Trajectory Tracking Formation Control for Underactuated Unmanned Underwater Vehicles with Prescribed Transient Performance. Ocean. Eng. 2021, 233, 109071. [Google Scholar] [CrossRef]
- Ding, Z.; Wang, H.; Sun, Y.; Qin, H. Adaptive Prescribed Performance Second-Order Sliding Mode Tracking Control of Autonomous Underwater Vehicle Using Neural Network-Based Disturbance Observer. Ocean. Eng. 2022, 260, 111939. [Google Scholar] [CrossRef]
- Dai, S.; Wang, M.; Wang, C. Neural Learning Control of Marine Surface Vessels with Guaranteed Transient Tracking Performance. IEEE Trans. Ind. Electron. 2015, 63, 1717–1727. [Google Scholar] [CrossRef]
- Ahmed, A.; Javed, S.B.; Uppal, A.A.; Iqbal, J. Development of Cavlab—A Control-Oriented Matlab Based Simulator for an Underground Coal Gasification Process. Mathematics 2023, 11, 2493. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, X.; Luo, M.; Yang, C. Mpc-Based 3-D Trajectory Tracking for an Autonomous Underwater Vehicle with Constraints in Complex Ocean Environments. Ocean. Eng. 2019, 189, 106309. [Google Scholar] [CrossRef]
- Gong, P.; Yan, Z.; Zhang, W.; Tang, J. Trajectory Tracking Control for Autonomous Underwater Vehicles Based On Dual Closed-Loop of Mpc with Uncertain Dynamics. Ocean. Eng. 2022, 265, 112697. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, Q.; Wu, W.; Du, X.; Zhang, Y.; Han, P. Event-Trigger Nmpc for 3-D Trajectory Tracking of Uuv with External Disturbances. Ocean. Eng. 2023, 283, 115050. [Google Scholar] [CrossRef]
- Gomes, R.; Pereira, F.L. A General Attainable-Set Model Predictive Control Scheme. Application to Auv Operations. Ifac-Papersonline 2018, 51, 314–319. [Google Scholar] [CrossRef]
- Shen, C.; Shi, Y. Distributed Implementation of Nonlinear Model Predictive Control for Auv Trajectory Tracking. Automatica 2020, 115, 108863. [Google Scholar] [CrossRef]
- Richards, A. Fast Model Predictive Control with Soft Constraints. Eur. J. Control 2015, 25, 51–59. [Google Scholar] [CrossRef]
- Oliveira, É.L.; Orsino, R.M.; Donha, D.C. Disturbance-Observer-Based Model Predictive Control of Underwater Vehicle Manipulator Systems. Ifac-Papersonline 2021, 54, 348–355. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Yu, S.; Yu, X.; Shirinzadeh, B.; Man, Z. Continuous Finite-Time Control for Robotic Manipulators with Terminal Sliding Mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Wang, R.; Tang, L.; Yang, Y.; Wang, S.; Tan, M.; Xu, C. Adaptive Trajectory Tracking Control with Novel Heading Angle and Velocity Compensation for Autonomous Underwater Vehicles. Ieee Transactions On Intelligent Vehicles. IEEE Trans. Intell. Veh. 2023, 8, 2135–2147. [Google Scholar] [CrossRef]
- Wang, H.; Su, B. Event-Triggered Formation Control of Auvs with Fixed-Time Rbf Disturbance Observer. Appl. Ocean. Res. 2021, 112, 102638. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Huang, Z.; Wang, W.; Xu, G.; Li, Y. Adaptive Energy-Efficient Tracking Control of a X Rudder Auv with Actuator Dynamics and Rolling Restriction. Appl. Ocean. Res. 2022, 118, 102994. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Double-Loop Integral Terminal Sliding Mode Tracking Control for Uuvs with Adaptive Dynamic Compensation of Uncertainties and Disturbances. IEEE J. Ocean. Eng. 2018, 44, 29–53. [Google Scholar] [CrossRef]
- Xia, Y.; Huang, Z.; Xu, K.; Xu, G.; Li, Y. Three-Dimensional Trajectory Tracking for a Heterogeneous Xauv Via Finite-Time Robust Nonlinear Control and Optimal Rudder Allocation. J. Mar. Sci. Eng. 2022, 10, 1297. [Google Scholar] [CrossRef]
- Yan, Z.; Gong, P.; Zhang, W.; Wu, W. Model Predictive Control of Autonomous Underwater Vehicles for Trajectory Tracking with External Disturbances. Ocean. Eng. 2020, 217, 107884. [Google Scholar] [CrossRef]
- Prestero, T.T.J. Verification of a Six-Degree of Freedom Simulation Model for the Remus Autonomous Underwater Vehicle; Massachusetts Institute of Technology: Cambridge, MA, USA, 2001. [Google Scholar]
- Andersson, J.A.; Gillis, J.; Horn, G.; Rawlings, J.B.; Diehl, M. CasADi: A Software Framework for Nonlinear Optimization and Optimal Control. Math. Program. Comput. 2019, 11, 1–36. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Xia, Y.; Xu, G.; He, Z.; Xu, K.; Xu, G. Three-Dimensional Prescribed Performance Tracking Control of UUV via PMPC and RBFNN-FTTSMC. J. Mar. Sci. Eng. 2023, 11, 1357. https://doi.org/10.3390/jmse11071357
Li J, Xia Y, Xu G, He Z, Xu K, Xu G. Three-Dimensional Prescribed Performance Tracking Control of UUV via PMPC and RBFNN-FTTSMC. Journal of Marine Science and Engineering. 2023; 11(7):1357. https://doi.org/10.3390/jmse11071357
Chicago/Turabian StyleLi, Jiawei, Yingkai Xia, Gen Xu, Zixuan He, Kan Xu, and Guohua Xu. 2023. "Three-Dimensional Prescribed Performance Tracking Control of UUV via PMPC and RBFNN-FTTSMC" Journal of Marine Science and Engineering 11, no. 7: 1357. https://doi.org/10.3390/jmse11071357
APA StyleLi, J., Xia, Y., Xu, G., He, Z., Xu, K., & Xu, G. (2023). Three-Dimensional Prescribed Performance Tracking Control of UUV via PMPC and RBFNN-FTTSMC. Journal of Marine Science and Engineering, 11(7), 1357. https://doi.org/10.3390/jmse11071357