
A LSSVR Interactive Network for AUV Motion Control

 and
and
Abstract
:1. Introduction
2. AUV Platform
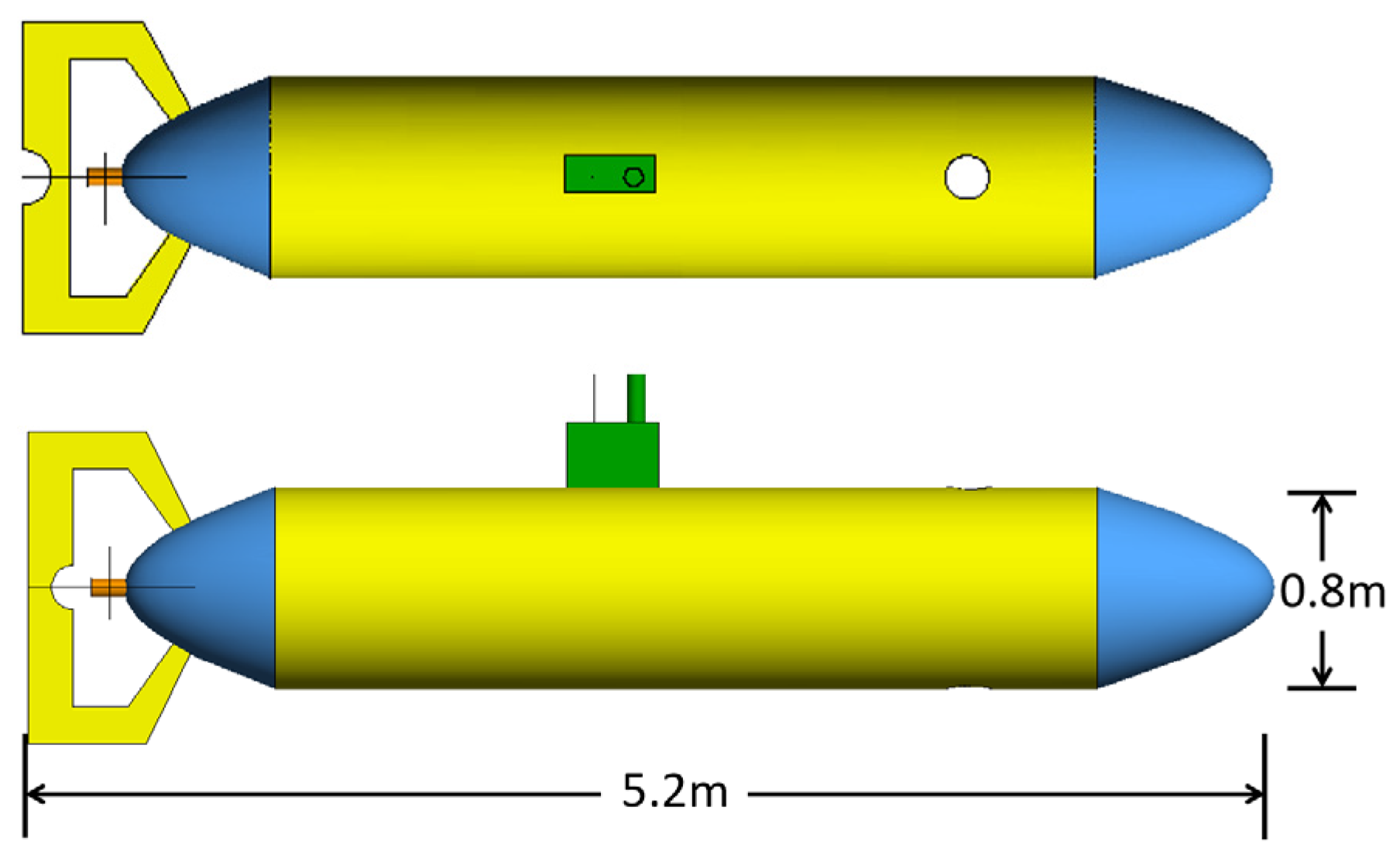
2.1. AUV Outline
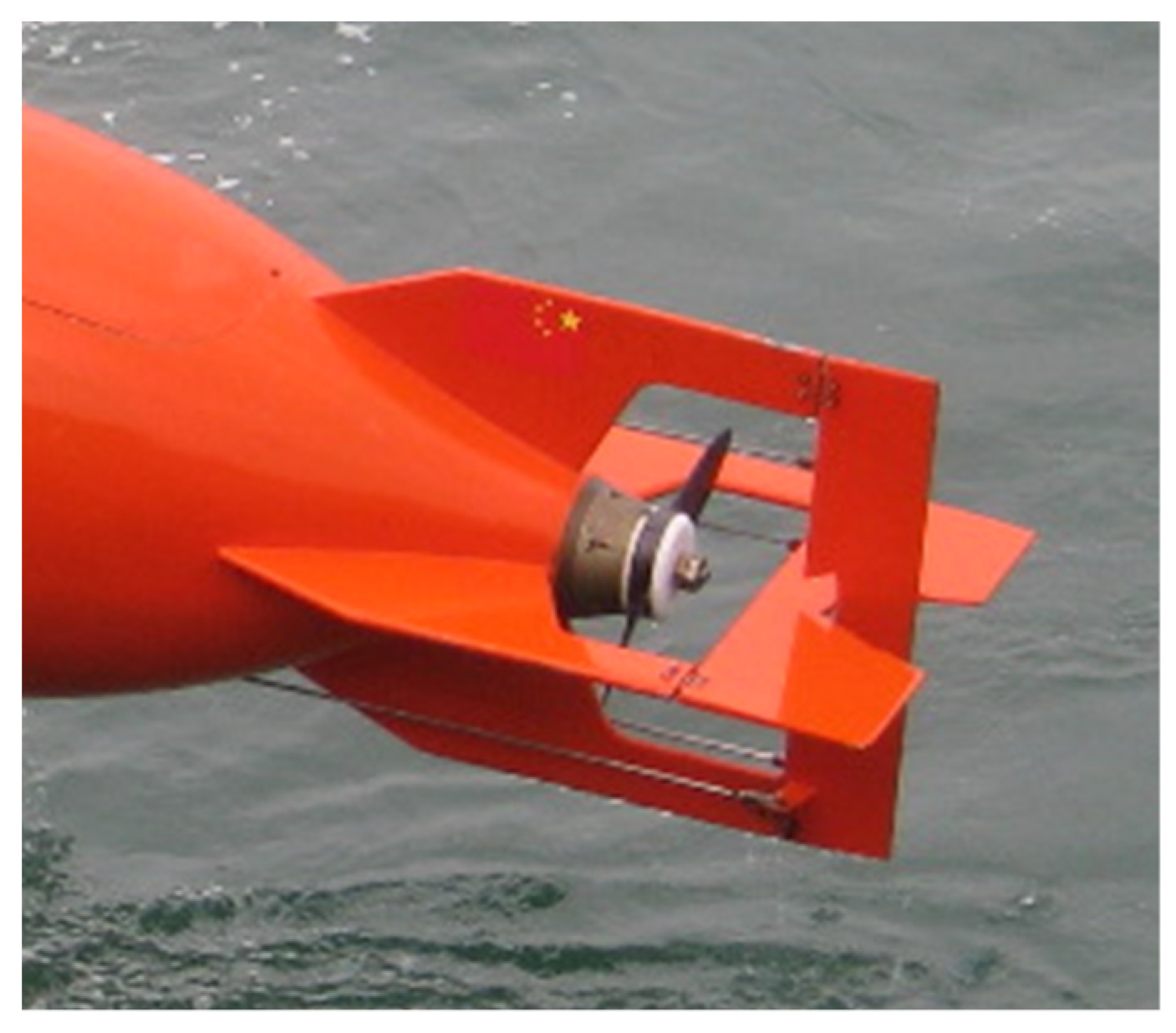
2.2. Propulsion System
2.3. Hardware Architecture
3. S-Plane Controller
4. LSSVR Network
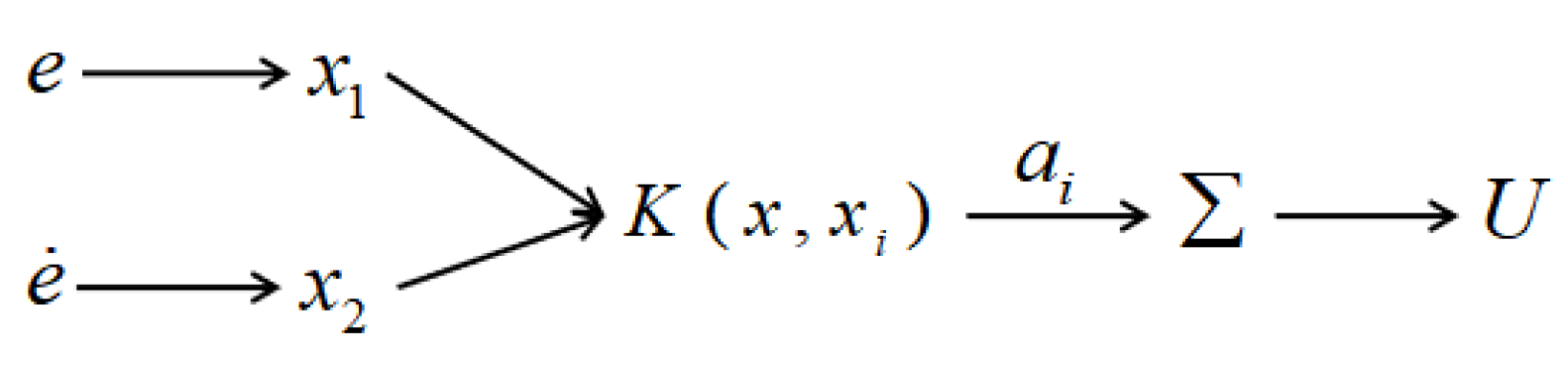
4.1. LSSVR
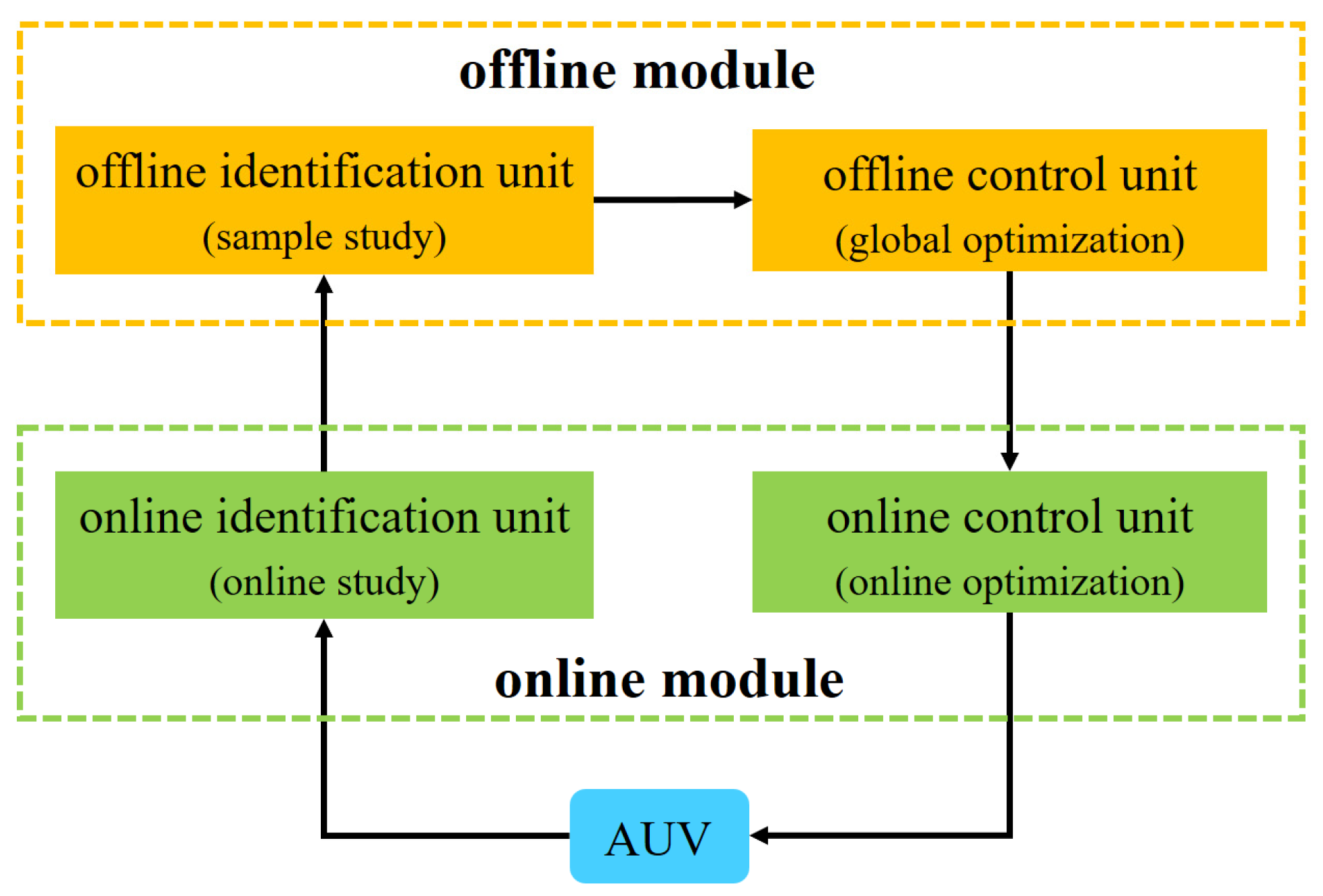
4.2. LSSVR Interactive Network
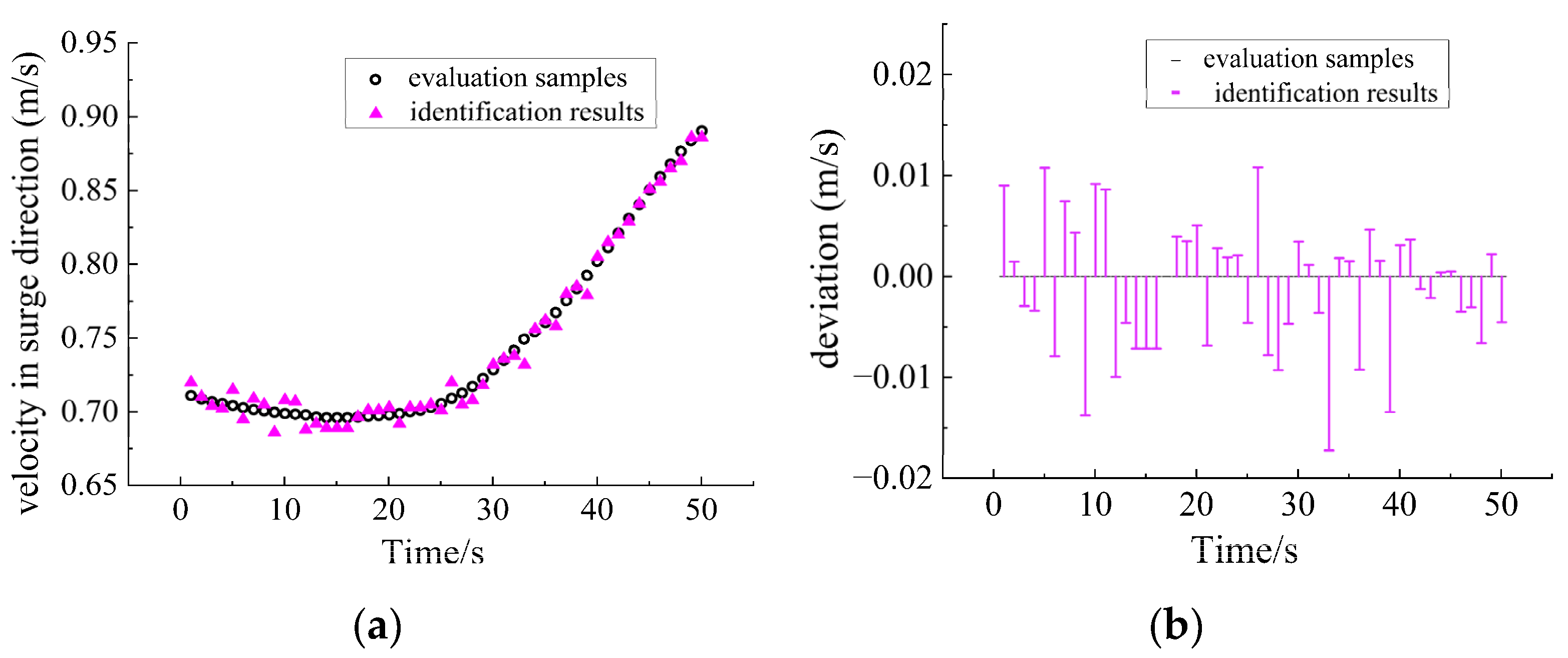
5. LSSVR Dynamics Model Identification
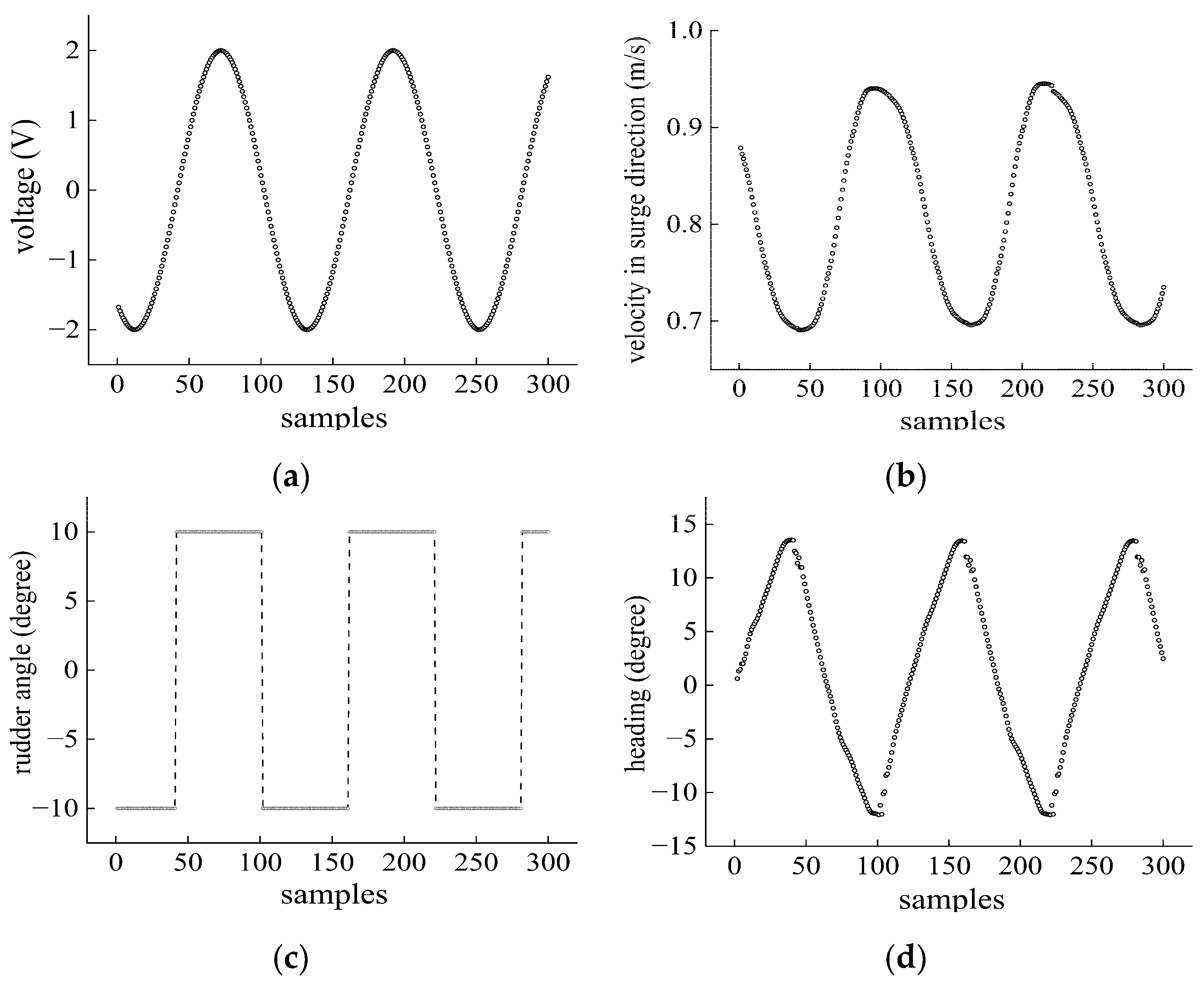
5.1. LSSVR Batch Learning
- (a)
- The range and search step of and are determined. Since exponential increase has been proved to be effective in the formation of parameter set, the range and search step of and are and , and .
- (b)
- A pair of () is chosen for cross verification of the sample set. The sample set is equally divided into groups, one of which is reserved in advance and the rest are used for model training. When the decision function is obtained, the reserved group is used to evaluate the learning accuracy of the decision function. Such a process is repeated times to make sure all groups are evaluated.
- (c)
- Step (b) is repeated until all pairs of () are covered. The pair that produces the minimum value of the evaluation function is the optimal parameter combination.
- (d)
- If the learning accuracy is not satisfying, a new grid plane should be designed centering (). Parameter pairs with similar values should be selected for further learning in order to achieve better learning effects.
5.2. LSSVR Online Learning
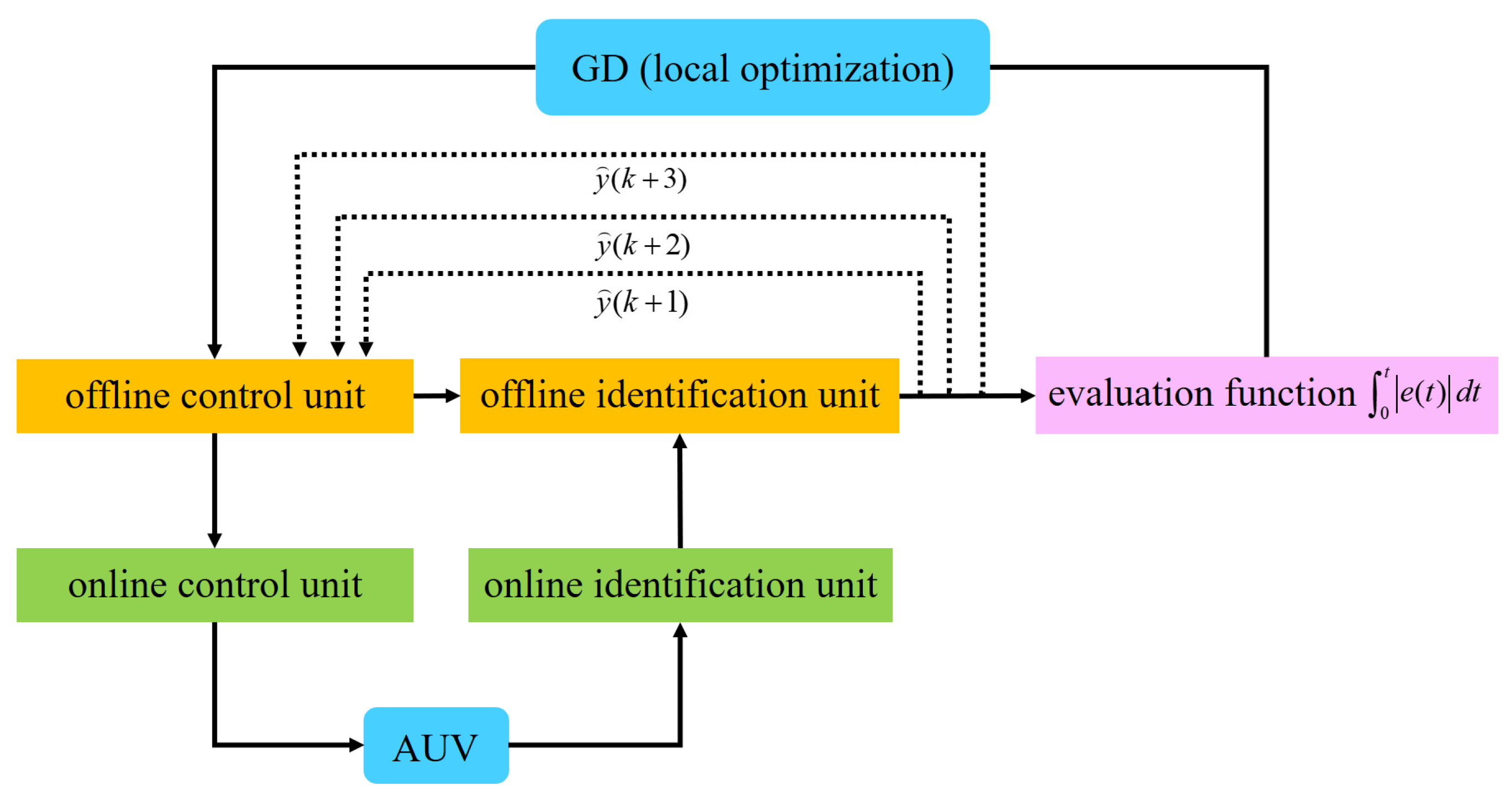
6. Controller Design and Optimization
6.1. Controller Offline Design
6.2. Controller Online Optimization
- (a)
- For the objective function , the initial value of () is set to be (), together with step and permissible error , .
- (b)
- The negative gradient and its unit vector are calculated.
- (c)
- If , the iteration terminates; otherwise, it continues.
- (d)
- Make .
- (e)
- If , the optimized () is output; otherwise, the above steps are repeated until the conditions are satisfied.
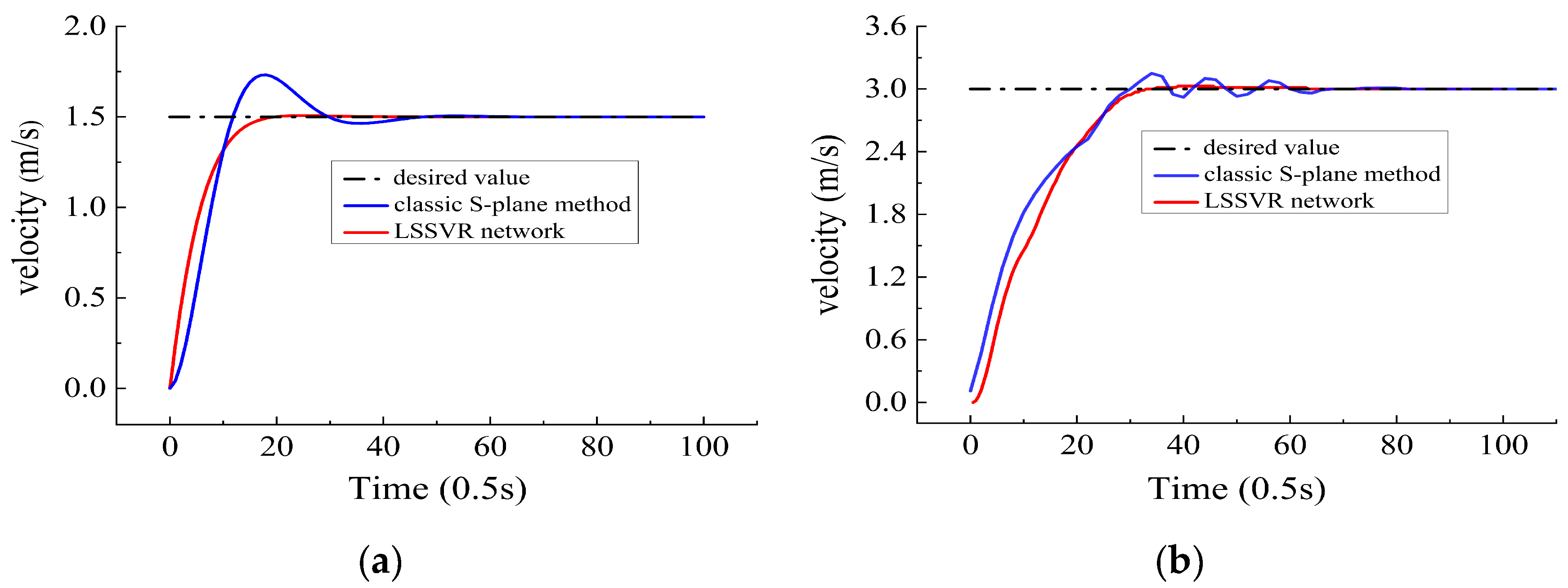
7. Numerical Simulations and Analysis
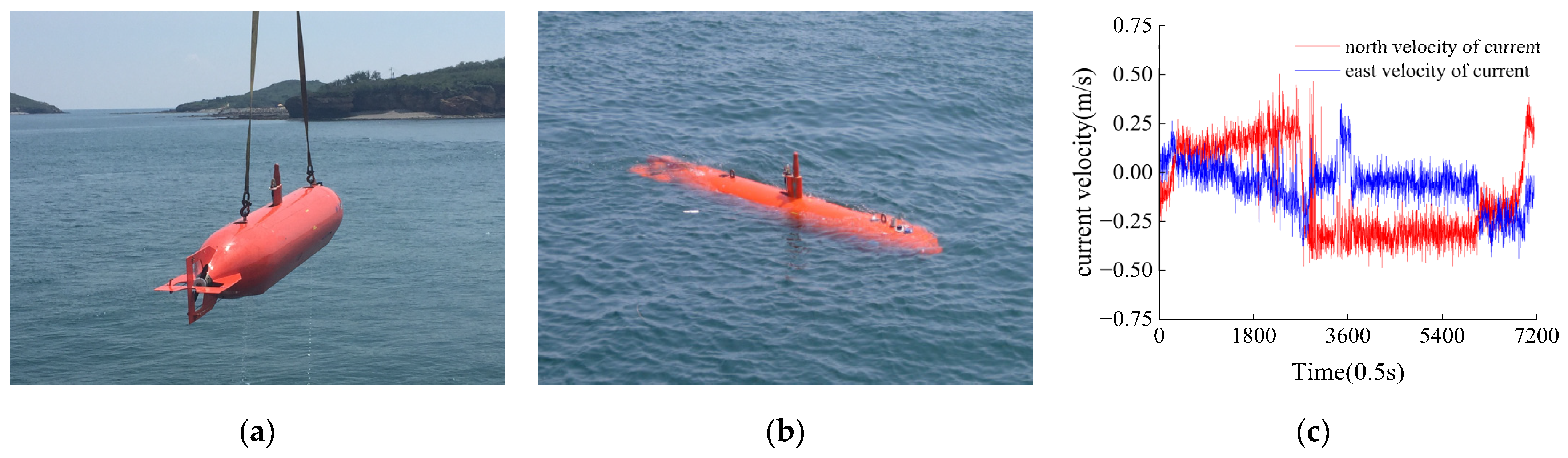
8. Sea Trials and Analysis
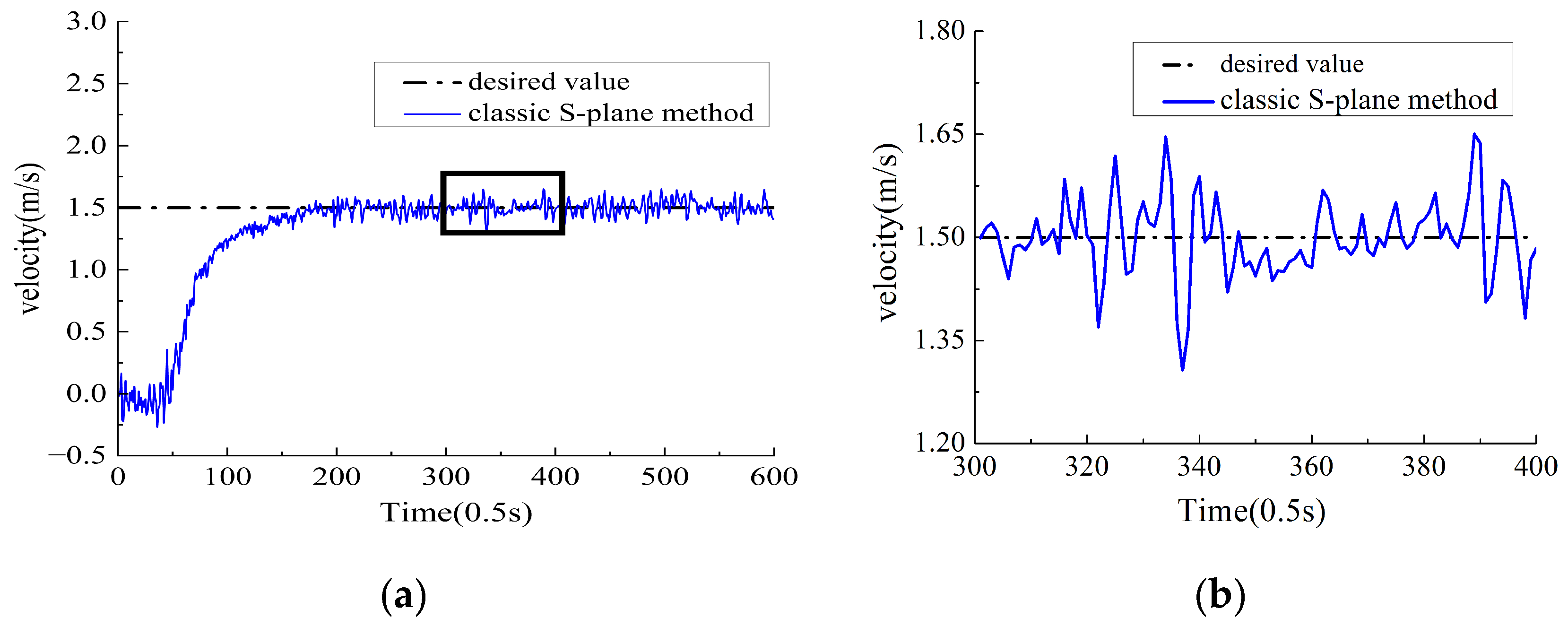
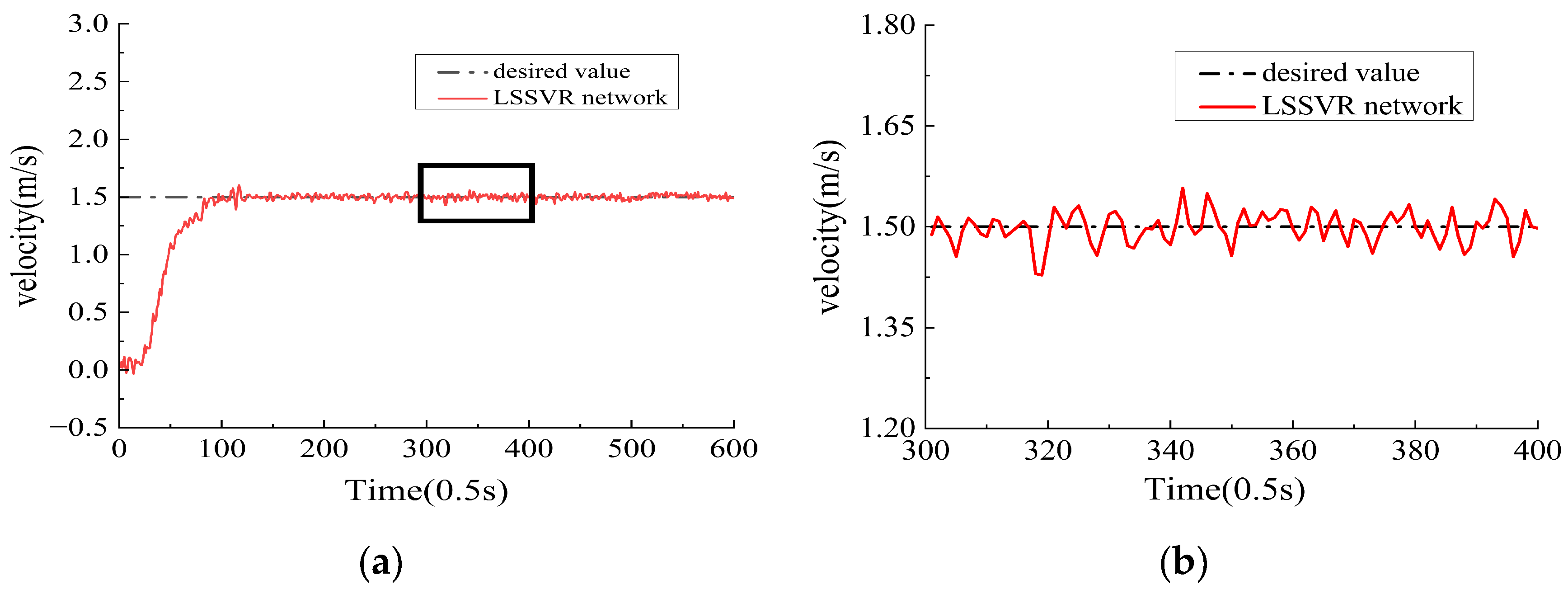
8.1. Contrast Trials on Velocity Control
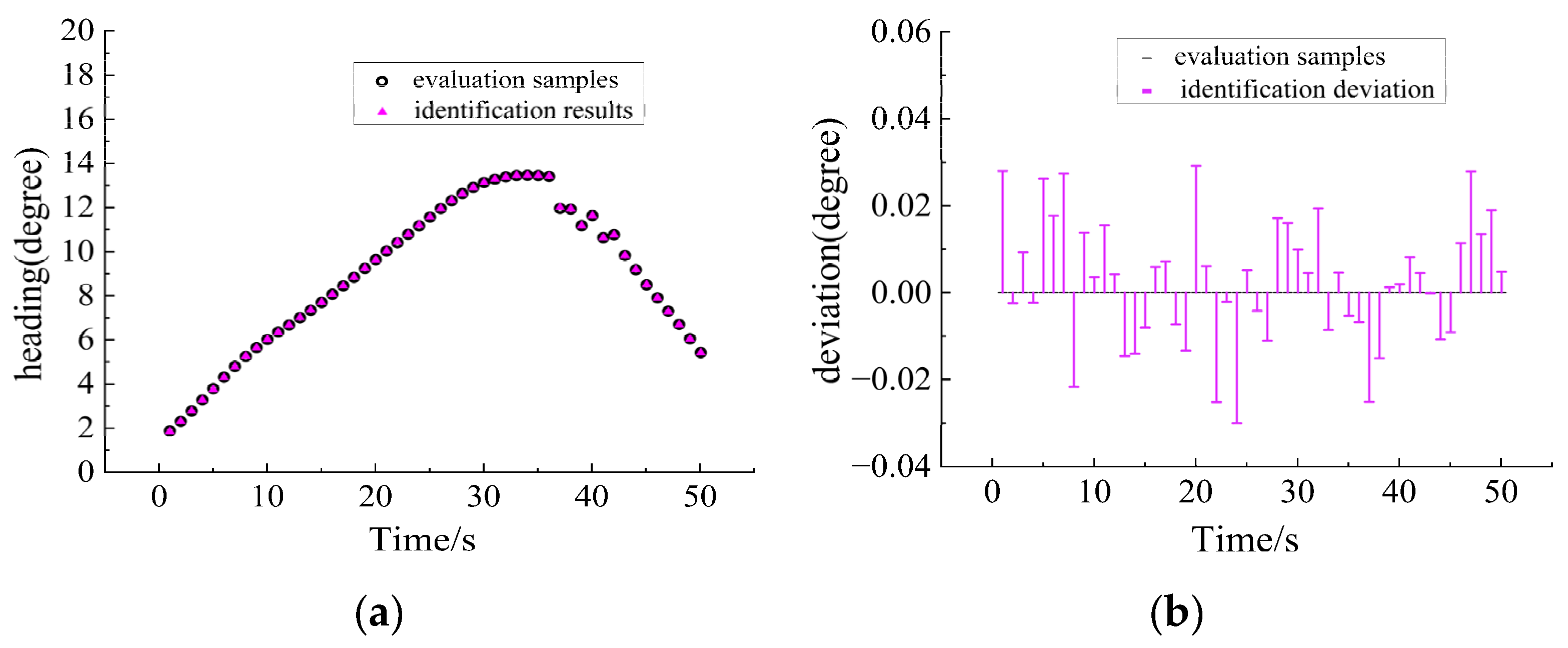
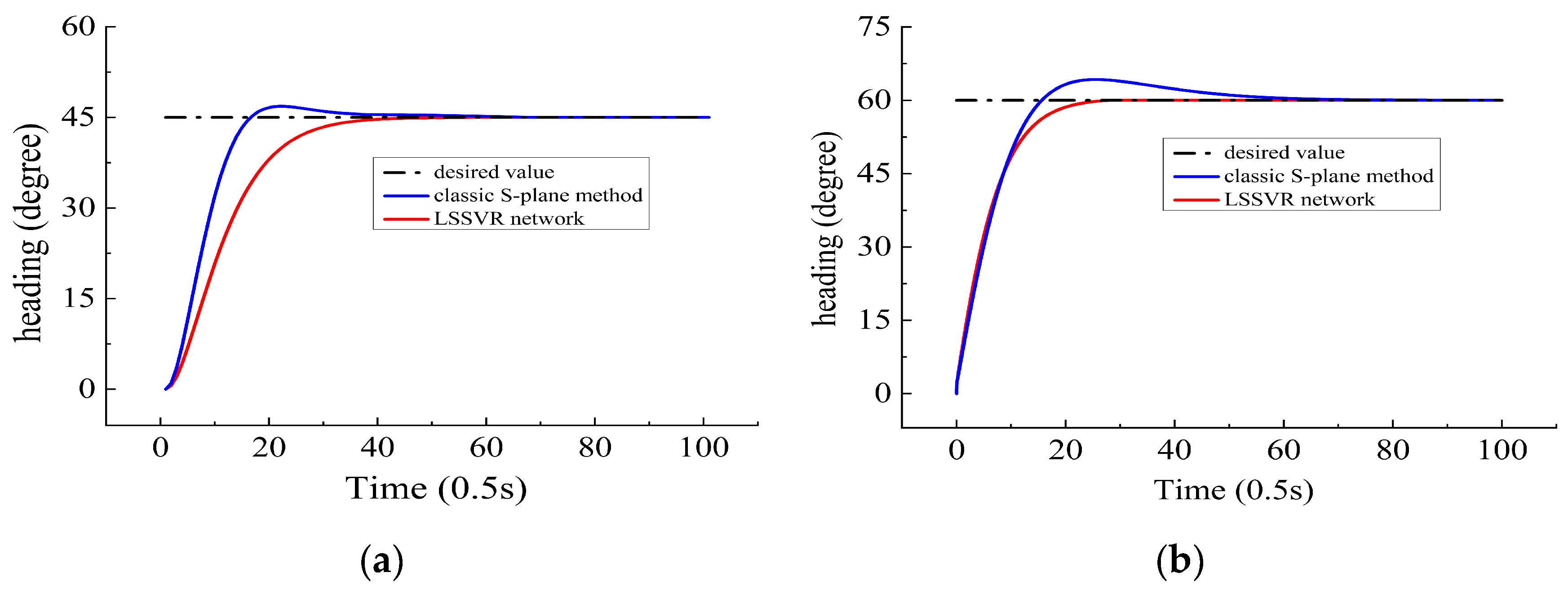
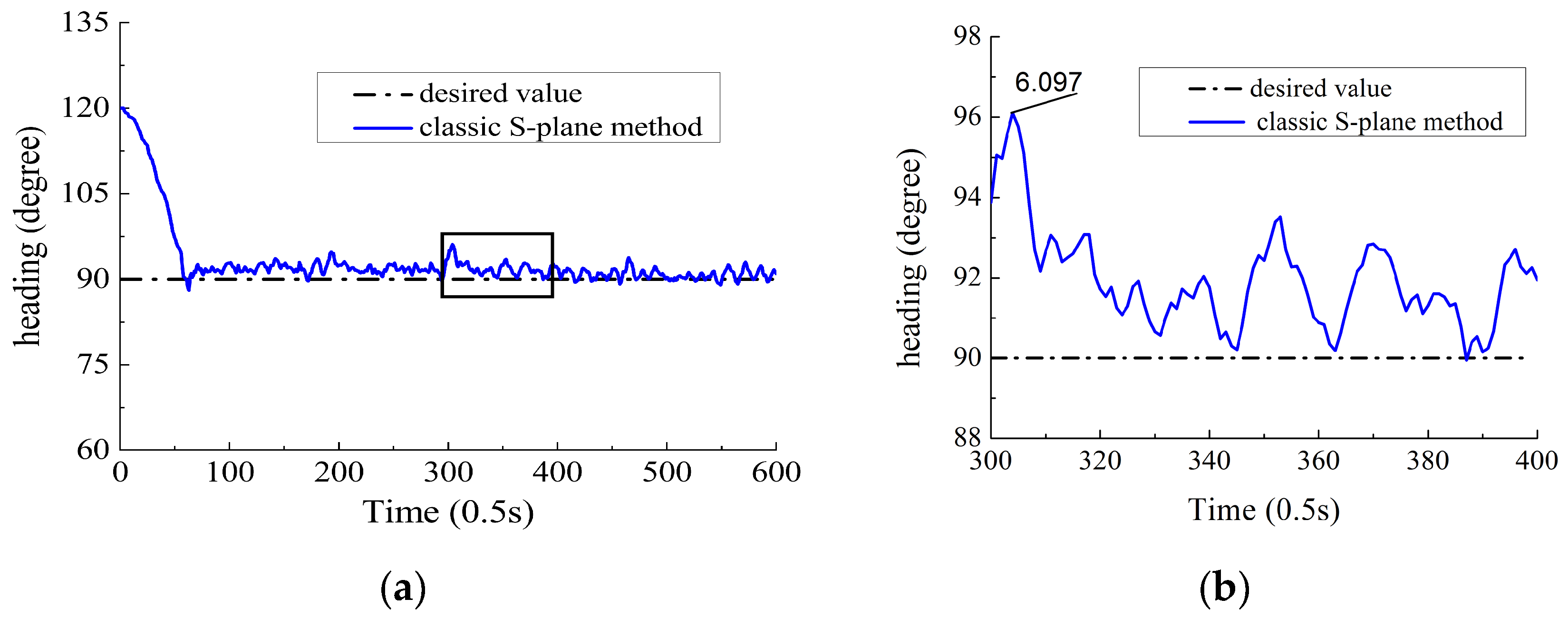
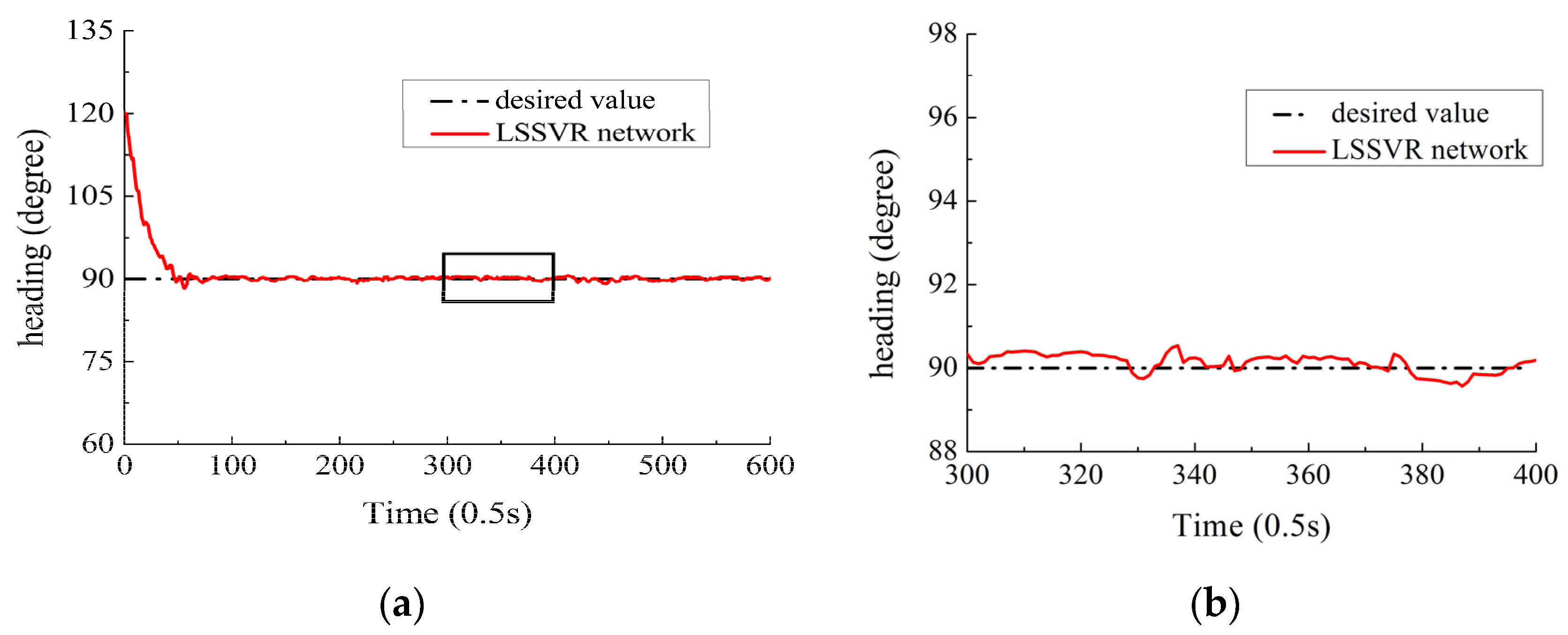
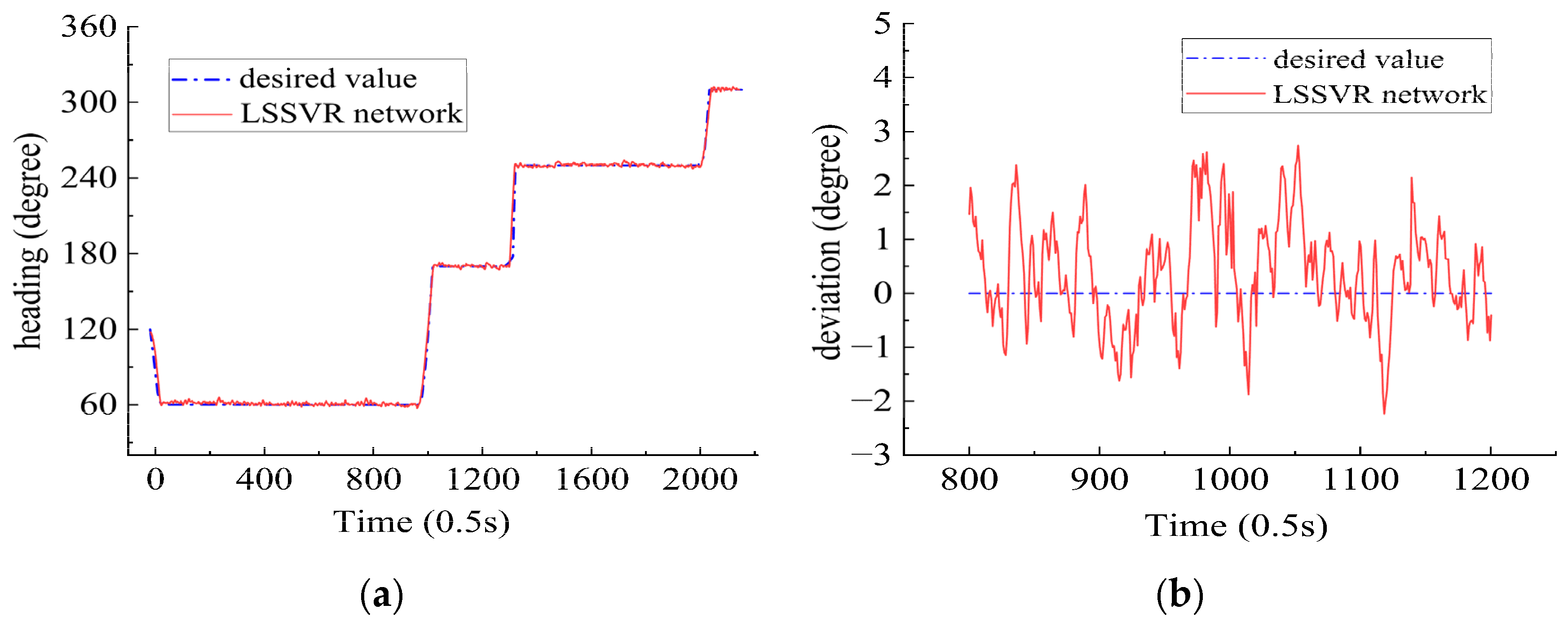
8.2. Contrast Trials on Heading Control
8.3. Analysis on Contrastive Trials
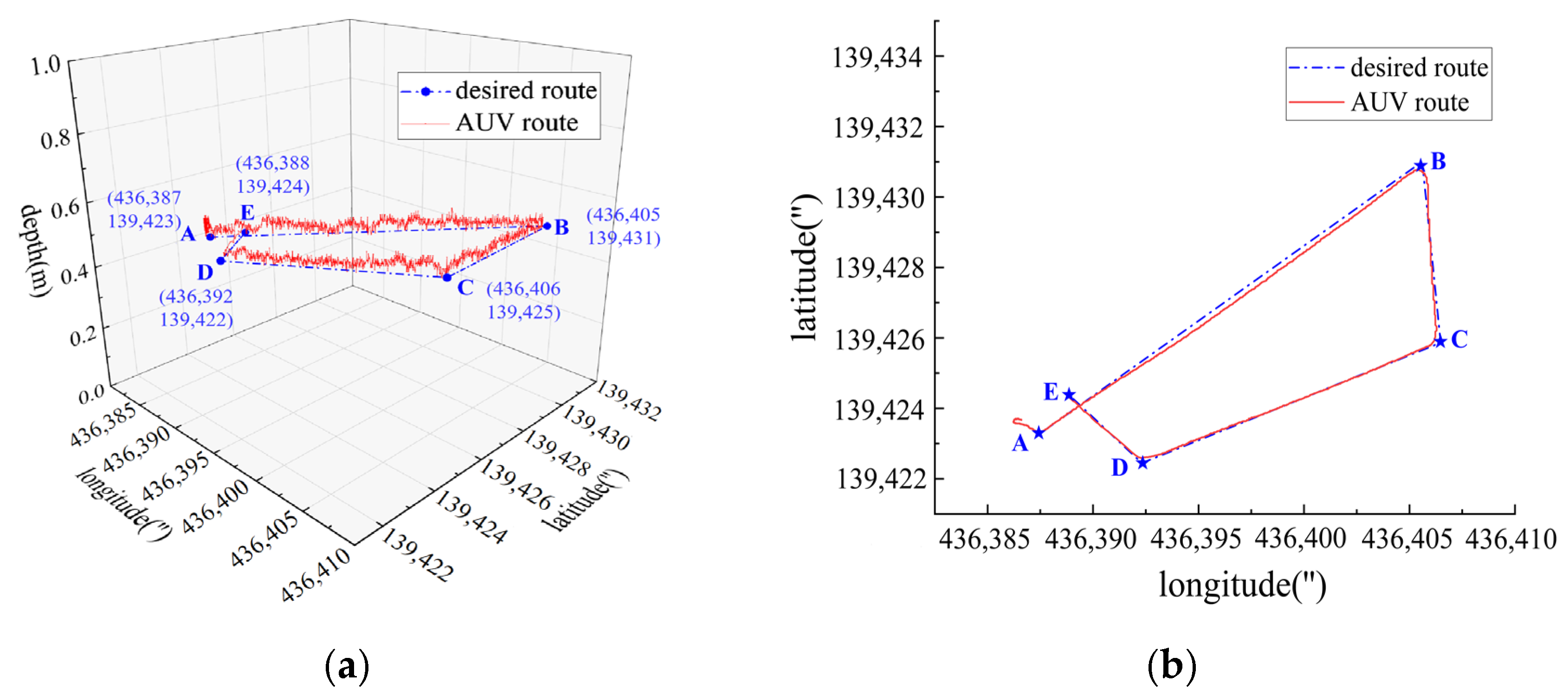
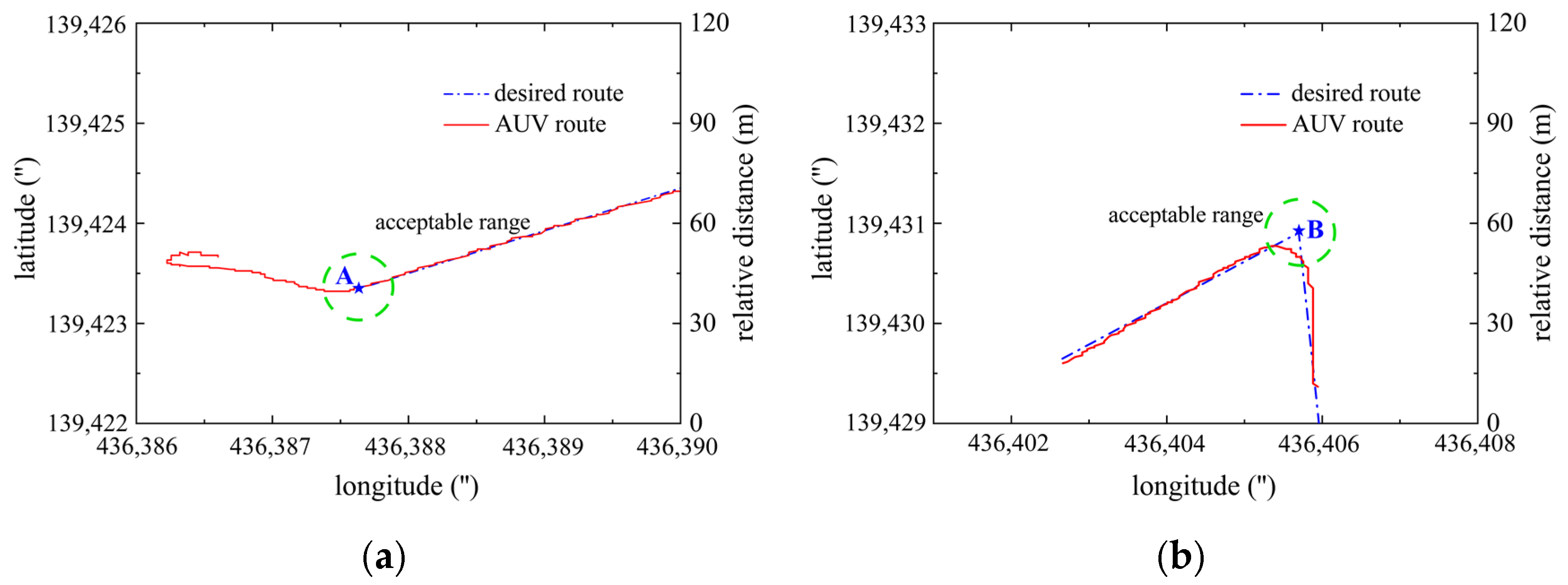
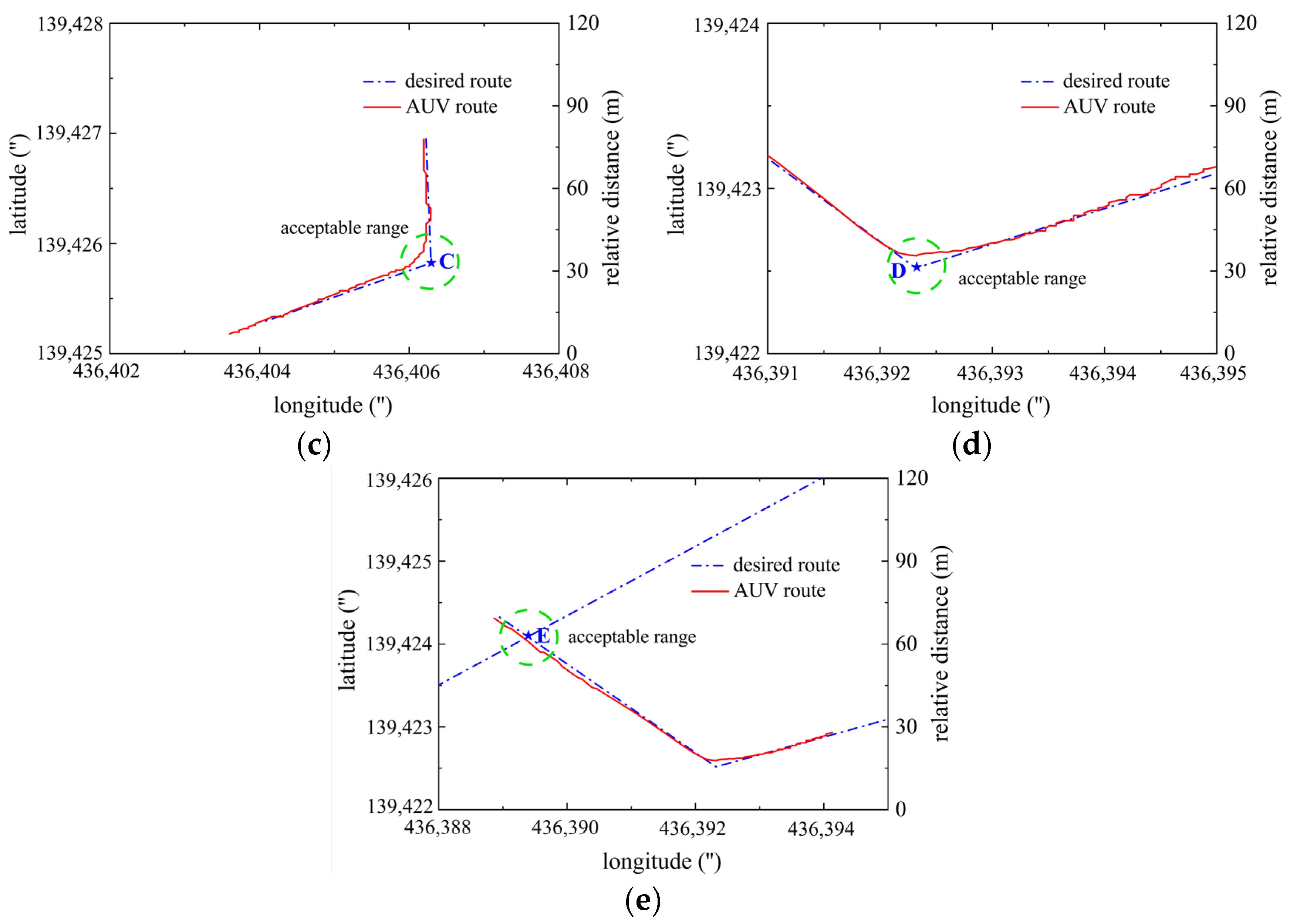
8.4. Path Following
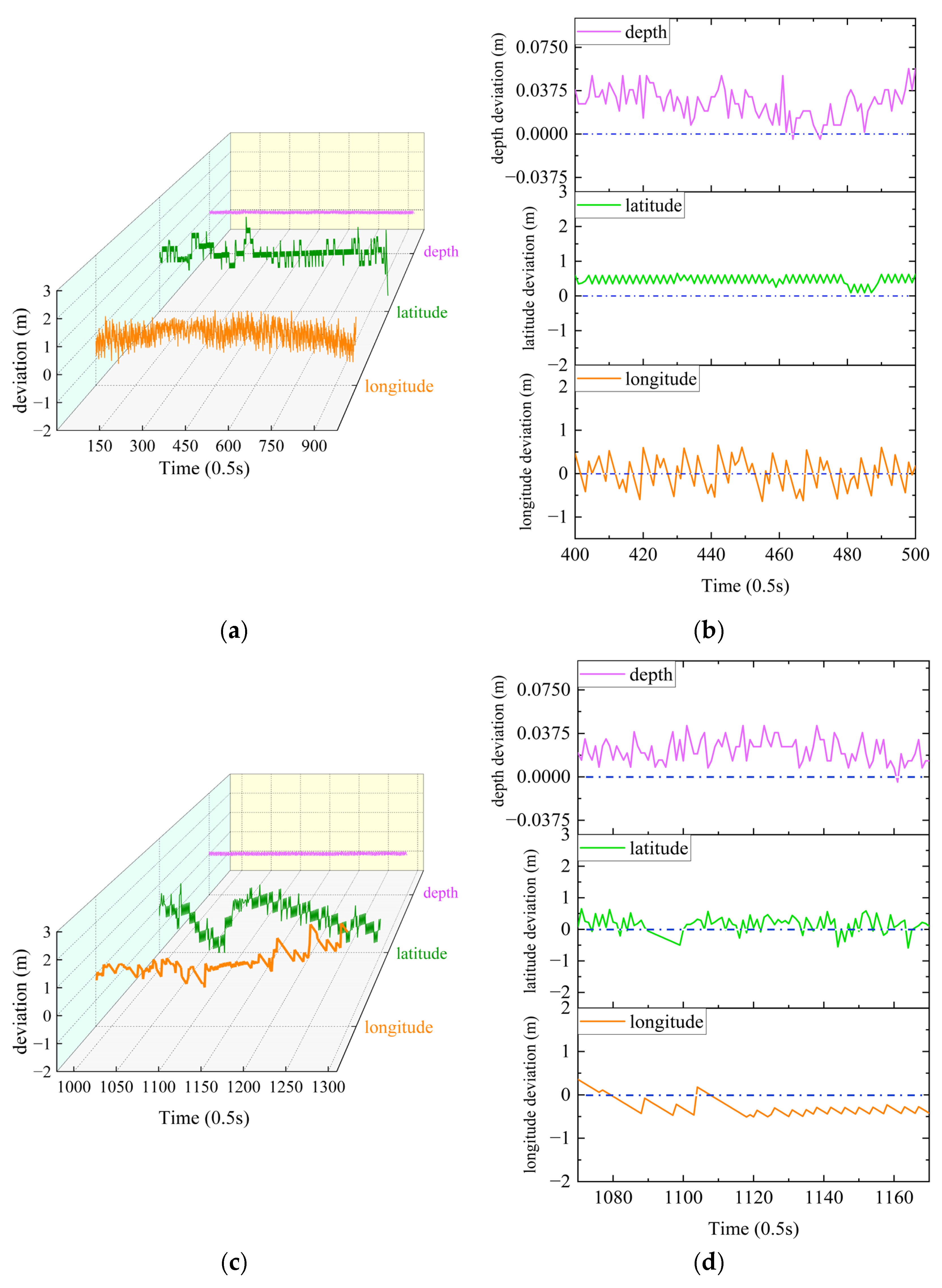
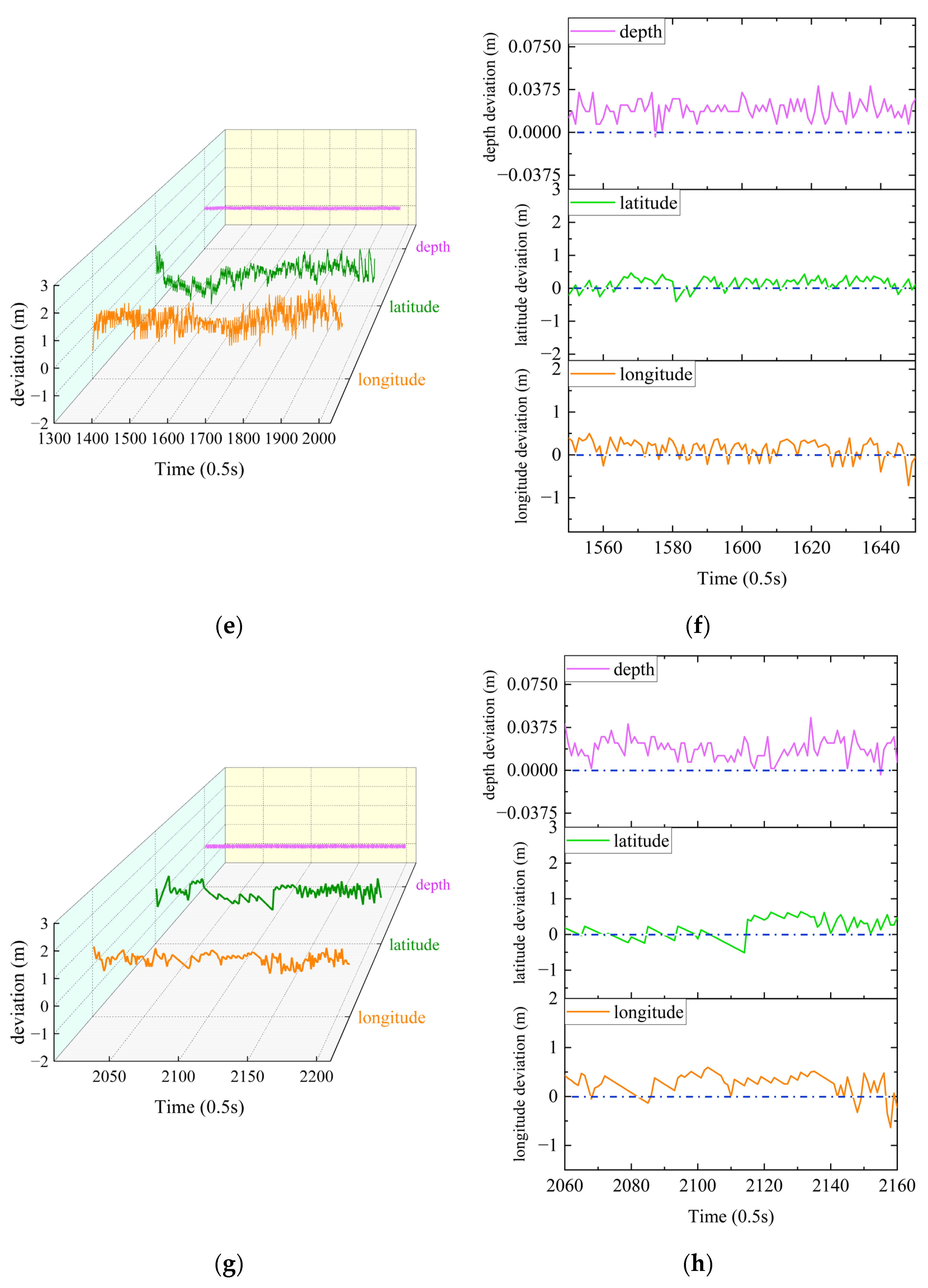
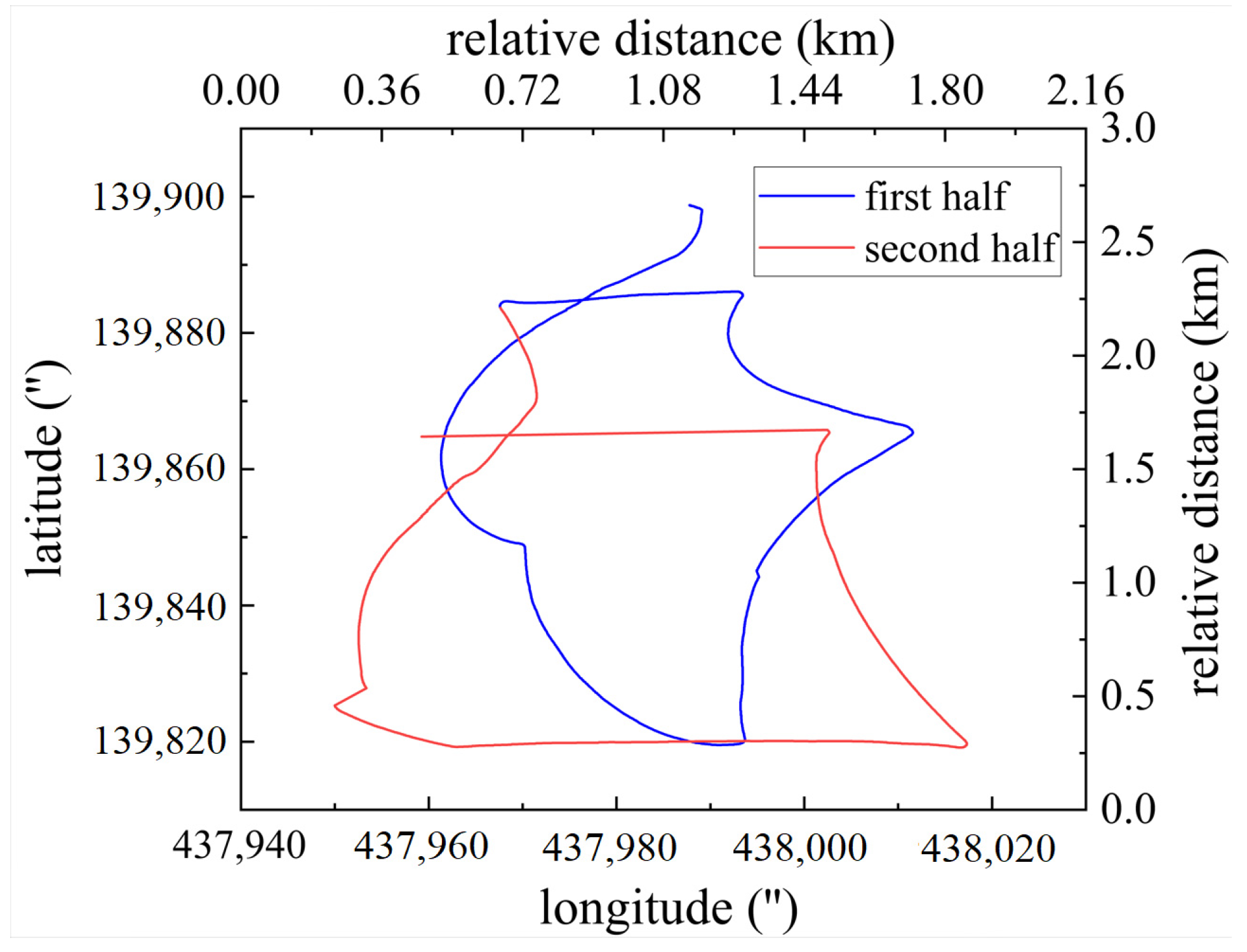
8.5. Long-Range Cruise
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alhaddad, S.; Förstner, J.; Grynko, Y. Numerical study of light backscattering from layers of absorbing irregular particles larger than the wavelength. J. Quant. Spectrosc. Radiat. Transf. 2023, 302, 108557. [Google Scholar] [CrossRef]
- Monebi, A.M.; Otgonbat, D.; Ahn, B.C.; Lee, C.S.; Ahn, J.H. Conceptual Design of a Semi-Dual Polarized Monopulse Antenna by Computer Simulation. Appl. Sci. 2023, 13, 2960. [Google Scholar] [CrossRef]
- Rutkowska, D.; Duda, P.; Cao, J.; Rutkowski, L.; Byrski, A.; Jaworski, M.; Tao, D. The L2 convergence of stream data mining algorithms based on probabilistic neural networks. Inf. Sci. 2023, 631, 346–368. [Google Scholar] [CrossRef]
- Kannan, R.; Nandwana, P. Accelerated alloy discovery using synthetic data generation and data mining. Scr. Mater. 2023, 228, 115335. [Google Scholar] [CrossRef]
- Wadi, A.; Mukhopadhyay, S. A novel localization-free approach to system identification for underwater vehicles using a Universal Adaptive Stabilizer. Ocean Eng. 2023, 274, 114013. [Google Scholar] [CrossRef]
- Baidillah, M.R.; Busono, P.; Riyanto, R. Mechanical ventilation intervention based on machine learning from vital signs monitoring: A scoping review. Meas. Sci. Technol. 2023, 34, 2001. [Google Scholar] [CrossRef]
- Pena, A.; Tejada, J.C.; Gonzalez-Ruiz, J.D.; Sepúlveda-Cano, L.M.; Chiclana, F.; Caraffini, F.; Gongora, M. An evolutionary intelligent control system for a flexible joints robot. Appl. Soft Comput. J. 2023, 135, 110043. [Google Scholar] [CrossRef]
- Perera, Y.S.; Ratnaweera, D.A.A.C.; Dasanayaka, C.H.; Abeykoon, C. The role of artificial intelligence-driven soft sensors in advanced sustainable process industries: A critical review. Eng. Appl. Artif. Intell. 2023, 121, 105988. [Google Scholar] [CrossRef]
- Bigman, D.P.; Day, D.J. Ground penetrating radar inspection of a large concrete spillway: A case-study using SFCW GPR at a hydroelectric dam. Case Stud. Constr. Mater. 2022, 16, e000975. [Google Scholar] [CrossRef]
- Character, L.; Ortiz, A., Jr.; Beach, T.; Luzzadder-Beach, S. Archaeologic Machine Learning for Shipwreck Detection Using Lidar and Sonar. Remote Sens. 2021, 13, 1759. [Google Scholar] [CrossRef]
- Wang, W.; Gao, Y. Pipeline leak detection method based on acoustic-pressure information fusion. Measurement 2023, 212, 112691. [Google Scholar] [CrossRef]
- Arif, J.; Rehman-Shaikh, M.A.; Evangelou, S.A. Novel evaluation and testing of technology qualification process of subsea oil and gas products. J. Pet. Sci. Eng. 2022, 208, 109576. [Google Scholar] [CrossRef]
- Toro, N.; Galvez, E.; Saldana, M.; Jeldres, R.I. Submarine mineral resources: A potential solution to political conflicts and global warming. Miner. Eng. 2022, 179, 107441. [Google Scholar] [CrossRef]
- Lu, J.; Feng, W.; Li, Y.; Zhang, J.; Zou, Y.; Li, J. VMD and self-attention mechanism-based Bi-LSTM model for fault detection of optical fiber composite submarine cables. EURASIP J. Adv. Signal Process. 2023, 2023, 000988. [Google Scholar] [CrossRef]
- Misiuk, B.; Lecours, V.; Dolan, M.F.J.; Robert, K. Evaluating the Suitability of Multi-Scale Terrain Attribute Calculation Approaches for Seabed Mapping Applications. Mar. Geod. 2021, 44, 327–385. [Google Scholar] [CrossRef]
- Khutornaia, E.; Gnevashev, Y. Development of an Application for Controlling an Underwater Vehicle. Transp. Res. Procedia 2023, 68, 858–862. [Google Scholar] [CrossRef]
- Tholen, C.; El-Mihoub, T.A.; Nolle, L.; Zielinski, O. Artificial Intelligence Search Strategies for Autonomous Underwater Vehicles Applied for Submarine Groundwater Discharge Site Investigation. J. Mar. Sci. Eng. 2021, 10, 7. [Google Scholar] [CrossRef]
- Madanipour, V.; Najafi, F. Modal analysis of underwater hull cleaning robot considering environmental interaction. Ocean Eng. 2023, 273, 113821. [Google Scholar] [CrossRef]
- Kolesnikov, A.A.; Yakimenko, O.I.; Radionov, I.A.; Kaliy, D.S. Comparison of the Methods of Classical and Synergetic Theories of Control of the Movement Autonomous Underwater Machine. Mekhatronika Avtom. Upr. 2019, 20, 663–668. [Google Scholar] [CrossRef]
- Ahn, J.K.; Koh, G.; So, M.O. Nonlinear PD Depth Control for Autonomous Underwater Vehicle. J. Fishries Mar. Sci. Educ. 2019, 31, 949–959. [Google Scholar]
- Bingul, Z.; Gul, K. Intelligent-PID with PD Feedforward Trajectory Tracking Control of an Autonomous Underwater Vehicle. Machines 2023, 11, 300. [Google Scholar] [CrossRef]
- Zhilenkov, A.; Chernyi, S.; Firsov, A. Autonomous Underwater Robot Fuzzy Motion Control System with Parametric Uncertainties. Designs 2021, 5, 24. [Google Scholar] [CrossRef]
- Duan, K.; Fong, S.; Chen, C.P. Fuzzy observer-based tracking control of an underactuated underwater vehicle with linear velocity estimation. IET Control. Theory Appl. 2020, 14, 584–593. [Google Scholar] [CrossRef]
- Guerrero, J.; Chemori, A.; Torres, J.; Creuze, V. Time-delay high-order sliding mode control for trajectory tracking of autonomous underwater vehicles under disturbances. Ocean Eng. 2023, 268, 113375. [Google Scholar] [CrossRef]
- Vadapalli, S.; Mahapatra, S. 3D Path Following Control of an Autonomous Underwater Robotic Vehicle Using Backstepping Approach Based Robust State Feedback Optimal Control Law. J. Mar. Sci. Eng. 2023, 11, 277. [Google Scholar] [CrossRef]
- Chen, H.; Tang, G.; Wang, S.; Guo, W.; Huang, H. Adaptive fixed-time backstepping control for three-dimensional trajectory tracking of underactuated autonomous underwater vehicles. Ocean Eng. 2023, 275, 114109. [Google Scholar] [CrossRef]
- Wen, L.; Yu, S.; Zhao, Y.; Yan, Y. Adaptive dynamic event-triggered consensus control of multiple autonomous underwater vehicles. Int. J. Control 2023, 96, 746–756. [Google Scholar] [CrossRef]
- Hasan, M.W.; Abbas, N.H. Disturbance Rejection for Underwater robotic vehicle based on adaptive fuzzy with nonlinear PID controller. ISA Trans. 2022, 130, 360–376. [Google Scholar] [CrossRef]
- Yan, Z.; Yang, H.; Zhang, W.; Gong, Q.; Zhang, Y.; Zhao, L. Robust nonlinear model predictive control of a bionic underwater robot with external disturbances. Ocean Eng. 2022, 253, 111310. [Google Scholar] [CrossRef]
- Khoshnam, S. Neural network feedback linearization target tracking control of underactuated autonomous underwater vehicles with a guaranteed performance. Ocean Eng. 2022, 258, 111827. [Google Scholar]
- Muñoz, F.; Cervantes-Rojas, J.S.; Valdovinos, J.M.; Sandre-Hernández, O.; Salazar, S.; Romero, H. Dynamic Neural Network-Based Adaptive Tracking Control for an Autonomous Underwater Vehicle Subject to Modeling and Parametric Uncertainties. Appl. Sci. 2021, 11, 2797. [Google Scholar] [CrossRef]
- Mazare, M.; Asharioun, H.; Davoudi, E.; Mokhtari, M. Distributed finite-time neural network observer-based consensus tracking control of heterogeneous underwater vehicles. Ocean Eng. 2023, 272, 113882. [Google Scholar] [CrossRef]
- Elhaki, O.; Shojaei, K.; Mehrmohammadi, P. Reinforcement learning-based saturated adaptive robust neural-network control of underactuated autonomous underwater vehicles. Expert Syst. Appl. 2022, 197, 116714. [Google Scholar] [CrossRef]
- Qin, H.; Si, J.; Wang, N.; Gao, L.; Shao, K. Disturbance Estimator-Based Nonsingular Fast Fuzzy Terminal Sliding-Mode Formation Control of Autonomous Underwater Vehicles. Int. J. Fuzzy Syst. 2023, 25, 395–406. [Google Scholar] [CrossRef]
- Menezes, J.; Sands, T. Discerning Discretization for Unmanned Underwater Vehicles DC Motor Control. J. Mar. Sci. Eng. 2023, 11, 436. [Google Scholar] [CrossRef]
- Sedghi, F.; Arefi, M.M.; Abooee, A. Command filtered-based neuro-adaptive robust finite-time trajectory tracking control of autonomous underwater vehicles under stochastic perturbations. Neurocomputing 2023, 519, 158–172. [Google Scholar] [CrossRef]
- Jiang, C.; Lv, J.; Wan, L.; Wang, J.; He, B.; Wu, G. An Improved S-Plane Controller for High-Speed Multi-Purpose AUVs with Situational Static Loads. J. Mar. Sci. Eng. 2023, 11, 646. [Google Scholar] [CrossRef]
- He, Y.; Xie, Y.; Pan, G.; Cao, Y.; Huang, Q.; Ma, S.; Zhang, D.; Cao, Y. Depth and Heading Control of a Manta Robot Based on S-Plane Control. J. Mar. Sci. Eng. 2022, 10, 1698. [Google Scholar] [CrossRef]
- Shankar, D.D.; Azhakath, A.S. Random embedded calibrated statistical blind steganalysis using cross validated support vector machine and support vector machine with particle swarm optimization. Sci. Rep. 2023, 13, 2359. [Google Scholar] [CrossRef]
- Rahimkhani, P.; Ordokhani, Y. Chelyshkov least squares support vector regression for nonlinear stochastic differential equations by variable fractional Brownian motion. Chaos Solitons Fractals Interdiscip. J. Nonlinear Sci. Nonequilib. Complex Phenom. 2022, 163, 112570. [Google Scholar] [CrossRef]
- Abdollahzadeh, M.; Khosravi, M.; Hajipour Khire Masjidi, B.; Samimi Behbahan, A.; Bagherzadeh, A.; Shahkar, A.; Tat Shahdost, F. Estimating the density of deep eutectic solvents applying supervised machine learning techniques. Sci. Rep. 2022, 12, 4954. [Google Scholar] [CrossRef] [PubMed]
- Pakniyat, A.; Parand, K.; Jani, M. Least squares support vector regression for differential equations on unbounded domains. Chaos Solitons Fractals Interdiscip. J. Nonlinear Sci. Nonequilib. Complex Phenom. 2021, 151, 111232. [Google Scholar] [CrossRef]
- Zhang, B.; Ji, D.; Liu, S.; Zhu, X.; Xu, W. Autonomous Underwater Vehicle navigation: A review. Ocean Eng. 2023, 273, 113861. [Google Scholar] [CrossRef]
- Cenerini, J.; Mehrez, M.W.; Han, J.W.; Jeon, S.; Melek, W. Model Predictive Path Following Control without terminal constraints for holonomic mobile robots. Control Eng. Pract. 2023, 132, 105406. [Google Scholar] [CrossRef]
- Krejčí, J.; Babiuch, M.; Babjak, J.; Suder, J.; Wierbica, R. Implementation of an Embedded System into the Internet of Robotic Things. Micromachines 2022, 14, 113. [Google Scholar] [CrossRef] [PubMed]
- Christensen, L.; de Gea Fernández, J.; Hildebrandt, M.; Koch, C.E.S.; Wehbe, B. Recent Advances in AI for Navigation and Control of Underwater Robots. Curr. Robot. Rep. 2022, 3, 165–175. [Google Scholar] [CrossRef]
- Machlev, R.; Perl, M.; Caciularu, A.; Belikov, J.; Levy, K.Y.; Levron, Y. Explaining the decisions of power quality disturbance classifiers using latent space features. Int. J. Electr. Power Energy Syst. 2023, 148, 108949. [Google Scholar] [CrossRef]
- Palar, P.S.; Parussini, L.; Bregant, L.; Shimoyama, K.; Zuhal, L.R. On kernel functions for bi-fidelity Gaussian process regressions. Struct. Multidiscip. Optim. 2023, 66, 3487. [Google Scholar] [CrossRef]
- Maroli, J.M. Generating discrete dynamical system equations from input–output data using neural network identification models. Reliab. Eng. Syst. Saf. 2023, 235, 109198. [Google Scholar] [CrossRef]
- Weigand, J.; Deflorian, M.; Ruskowski, M. Input-to-state stability for system identification with continuous-time Runge–Kutta neural networks. Int. J. Control 2023, 96, 24–40. [Google Scholar] [CrossRef]
- Parand, K.; Hasani, M.; Jani, M.; Yari, H. Numerical simulation of Volterra–Fredholm integral equations using least squares support vector regression. Comput. Appl. Math. 2021, 40, 246. [Google Scholar] [CrossRef]
- Moqaddasi Amiri, M.; Tapak, L.; Faradmal, J. A mixed-effects least square support vector regression model for three-level count data. J. Stat. Comput. Simul. 2019, 89, 2801–2812. [Google Scholar] [CrossRef]
- Daskin, A.; Gupta, R.; Kais, S. Dimension Reduction and Redundancy Removal through Successive Schmidt Decompositions. Appl. Sci. 2023, 13, 3172. [Google Scholar] [CrossRef]
- Oh, K.S.; Lee, J.W. Auxiliary algorithm to approach a near-global optimum of a multi-objective function in acoustical topology optimization. Eng. Appl. Artif. Intell. 2023, 117, 105488. [Google Scholar] [CrossRef]
- Shakeel, M.; Samanova, A.; Pourafshary, P.; Hashmet, M.R. Optimization of Low Salinity Water/Surfactant Flooding Design for Oil-Wet Carbonate Reservoirs by Introducing a Negative Salinity Gradient. Energies 2022, 15, 9400. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit | Inputs | Outputs |
|---|---|---|
| offline identification | thrust | velocity |
| velocity | ||
| offline control | desired velocity | thrust |
| prediction from identification unit | ||
| online identification | thrust | velocity |
| velocity | ||
| online control | desired velocity | thrust |
| velocity from sensors |
| Velocity Control (1.5 m/s) | Heading Control (90°) | |||
|---|---|---|---|---|
| Classic S-Plane | LSSVR Network | Classic S-Plane | LSSVR Network | |
| maximum overshoot | 0.150 m/s | 0.057 m/s | 6.097° | 1.675° |
| standard deviation | 0.087 m/s | 0.023 m/s | 1.233° | 0.223° |
| arithmetic mean value | 1.499 m/s | 1.499 m/s | 91.954° | 90.186° |
| Position | Maximum Deviation | Arithmetic Mean Value | ||||
|---|---|---|---|---|---|---|
| Longitude (m) | Latitude (m) | Depth (m) | Longitude (m) | Latitude (m) | Depth (m) | |
| A–B (400–500 beat) | 0.653 | 0.642 | 0.056 | 0.013 | 0.457 | 0.026 |
| B–C (1070–1170 beat) | 0.354 | 0.651 | 0.044 | −0.268 | 0.131 | 0.022 |
| C–D (1550–1650 beat) | 0.499 | 0.465 | 0.041 | 0.141 | 0.145 | 0.020 |
| D–E (2060–2160 beat) | 0.596 | 0.637 | 0.046 | 0.261 | 0.163 | 0.019 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Wan, L.; Zhang, H.; Tang, J.; Wang, J.; Li, S.; Chen, L.; Wu, G.; He, B. A LSSVR Interactive Network for AUV Motion Control. J. Mar. Sci. Eng. 2023, 11, 1111. https://doi.org/10.3390/jmse11061111
Jiang C, Wan L, Zhang H, Tang J, Wang J, Li S, Chen L, Wu G, He B. A LSSVR Interactive Network for AUV Motion Control. Journal of Marine Science and Engineering. 2023; 11(6):1111. https://doi.org/10.3390/jmse11061111
Chicago/Turabian StyleJiang, Chunmeng, Lei Wan, Hongrui Zhang, Jian Tang, Jianguo Wang, Shupeng Li, Long Chen, Gongxing Wu, and Bin He. 2023. "A LSSVR Interactive Network for AUV Motion Control" Journal of Marine Science and Engineering 11, no. 6: 1111. https://doi.org/10.3390/jmse11061111
APA StyleJiang, C., Wan, L., Zhang, H., Tang, J., Wang, J., Li, S., Chen, L., Wu, G., & He, B. (2023). A LSSVR Interactive Network for AUV Motion Control. Journal of Marine Science and Engineering, 11(6), 1111. https://doi.org/10.3390/jmse11061111