
Surfacing Positioning Point Prediction of Underwater Glider with a New Combination Model

 , and
, and 
Abstract
:1. Introduction
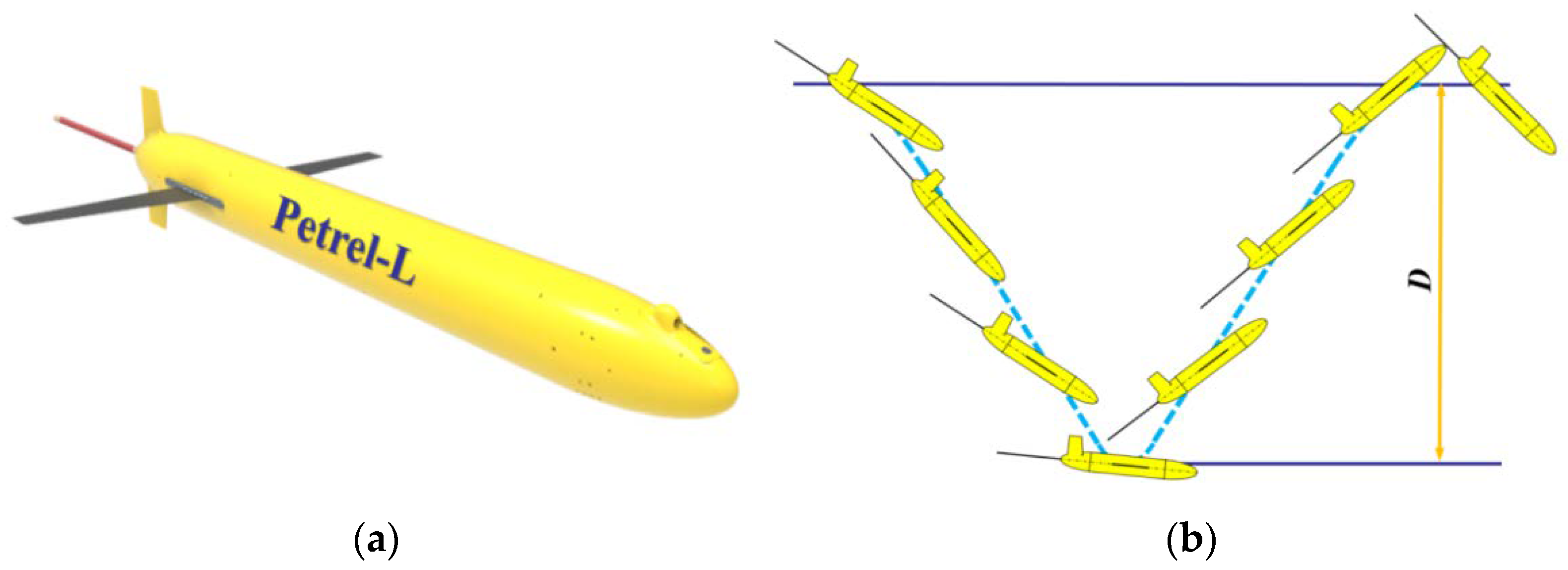
2. Petrel-L Underwater Glider
2.1. Configuration and Working Flow of Petrel-L
2.2. Kinematic Model of Petrel-L
3. Prediction Models
3.1. Regression Models
3.2. Classical Machine Learning Models
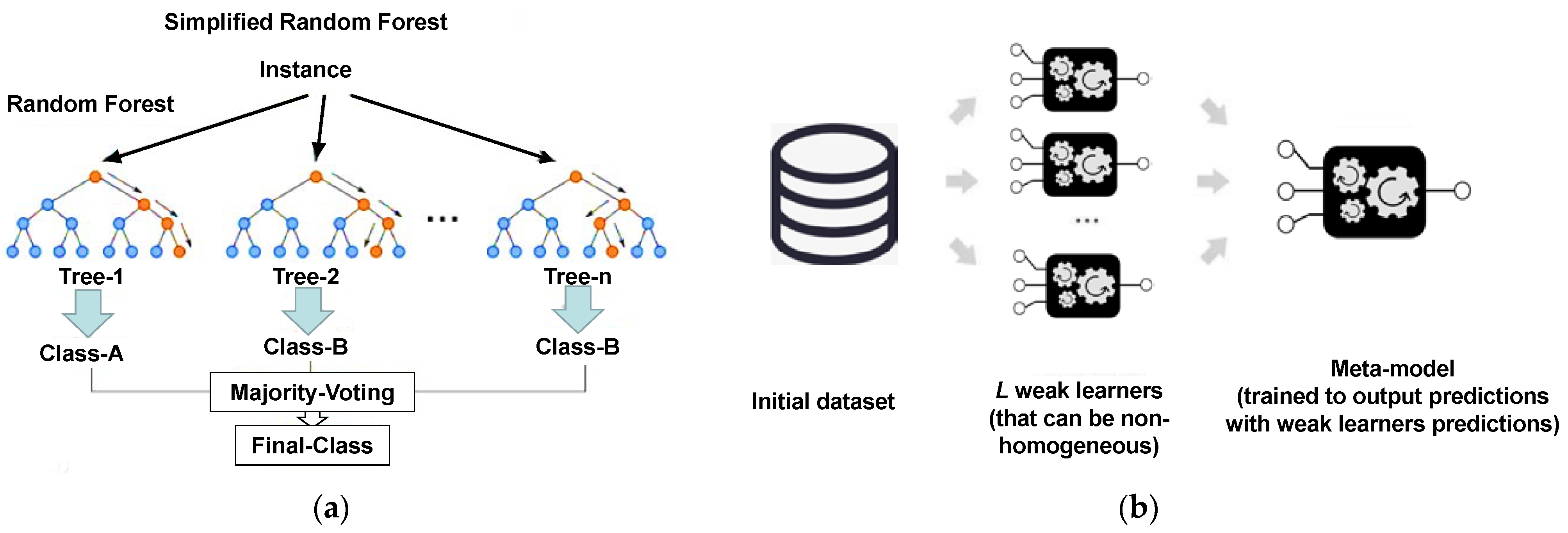
3.3. Tree-Based Models
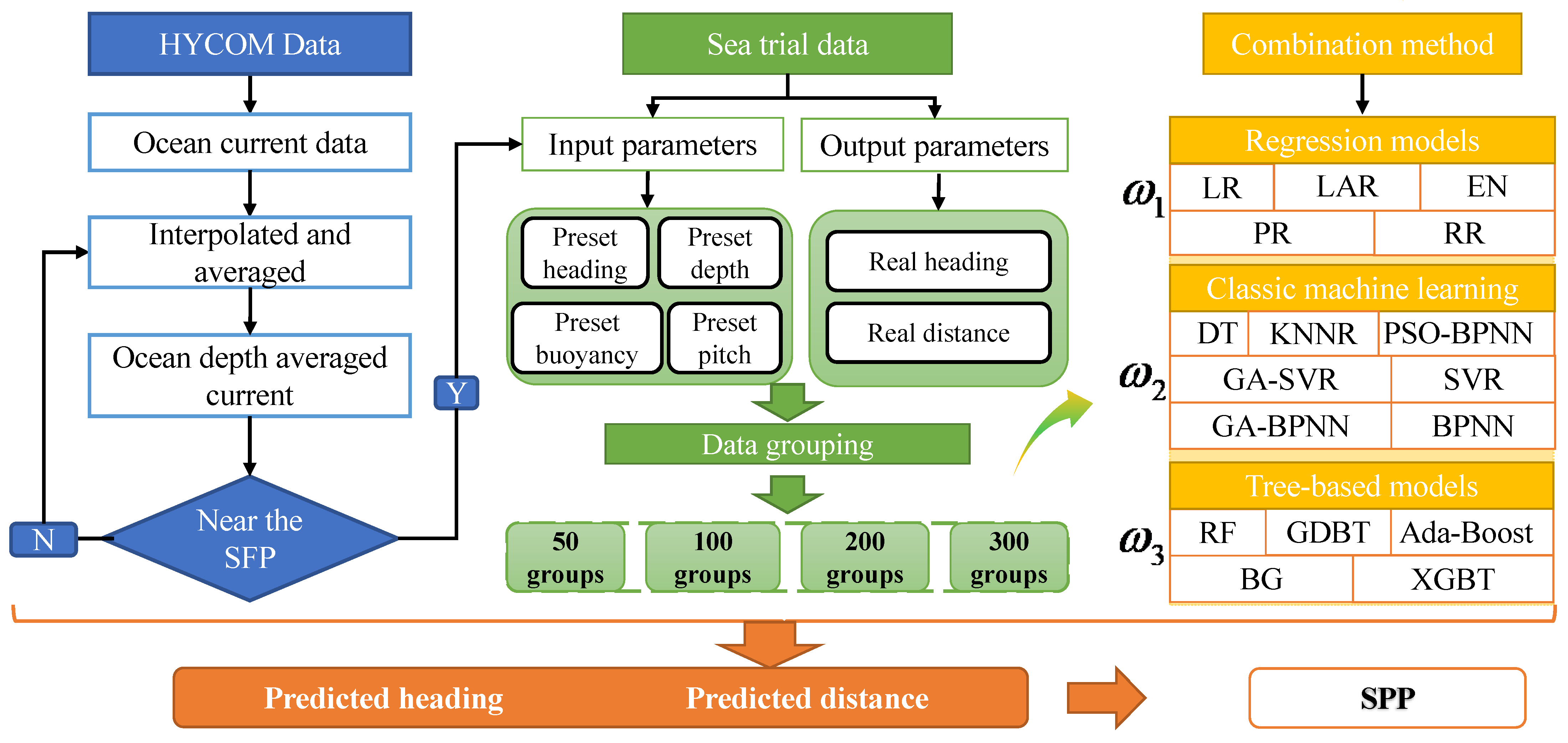
3.4. Simulated Annealing Optimized Frank–Wolfe Combination Model
| Algorithm 1: SAFW algorithm |
| Input: historical data → from glider flash 1: Divide the data into train set and test set 2: Import train data into single prediction model Yit (i = 1,2, …n, t = 1,2, …N) |
| 3: Test the data with the evaluation index (MSE and MAE) 4: Output eit → the prediction error of ith model, eit = eMAE + eMSE |
| 5: Calculate the error information matrix E |
| 6: Define initial weight and allowance error |
| 7: Solve Equation (10), and obtain the optimal solution U(k) |
| 8: if , 9: then stop the calculation and output W(k) |
| 10: else Start from W(k), and call SA for search; |
| 11: Add the variable to W(k) for search, then W(k+1) = + W(k) |
| 12: if f(W(k+1)) < f(W(k)) 13: then W = W(k) |
| 14: else Calculate the accepting possibility p = exp(−Δf/(kT)) |
| 15: Reach the iteration times, then |
| 16: Substitute in to , Output: λk |
| Return minimal prediction error J |
4. Experimental Results and Discussion
4.1. Data of Oceanic Depth-Averaged Current
4.2. Sea Trial Data
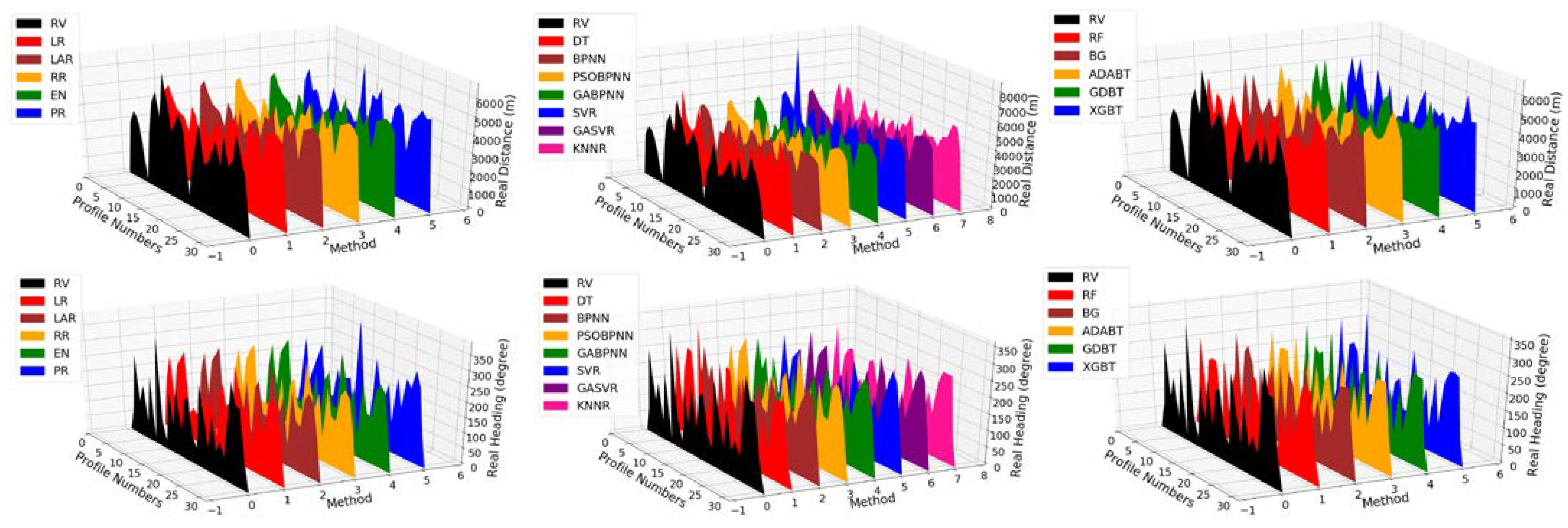
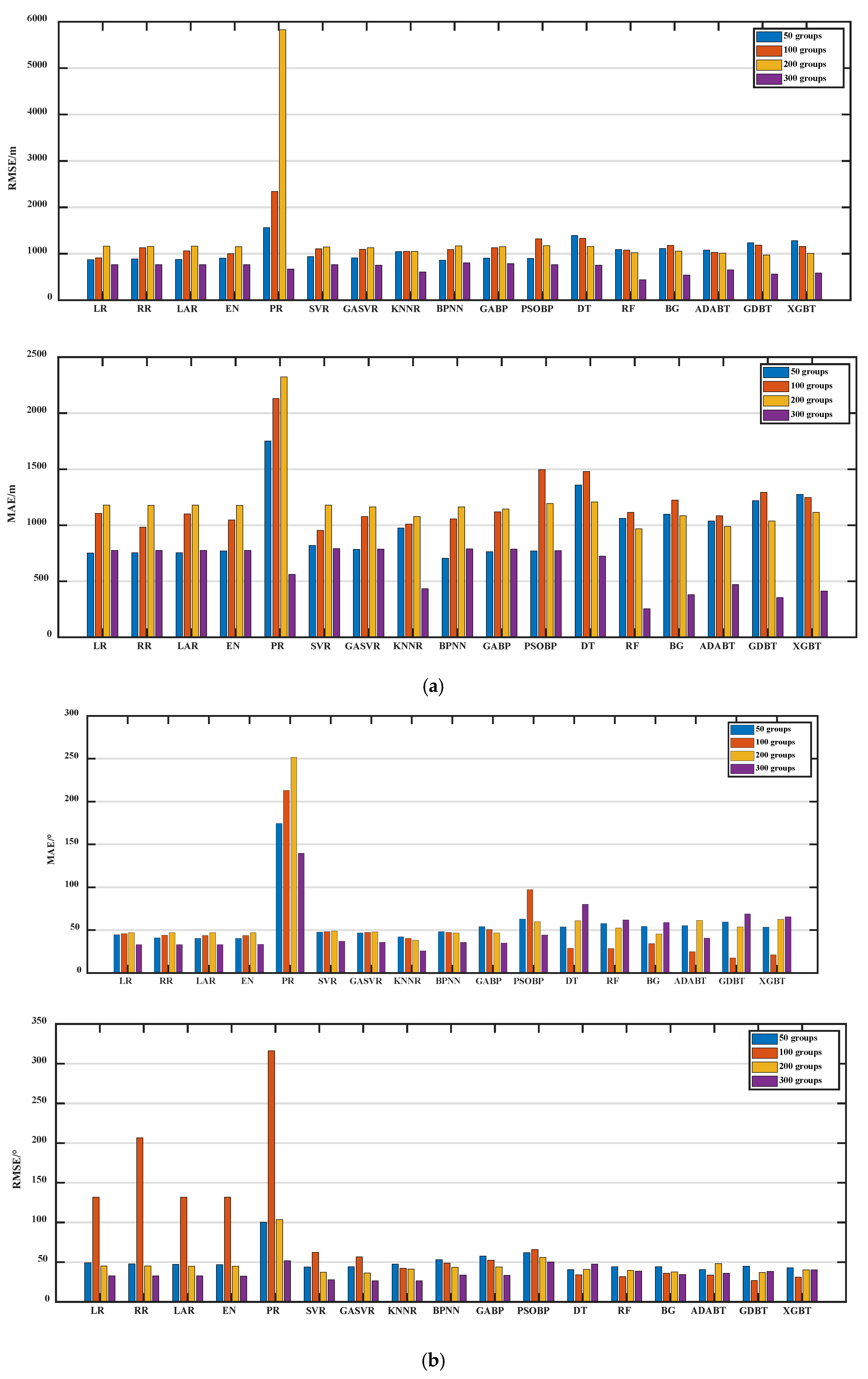
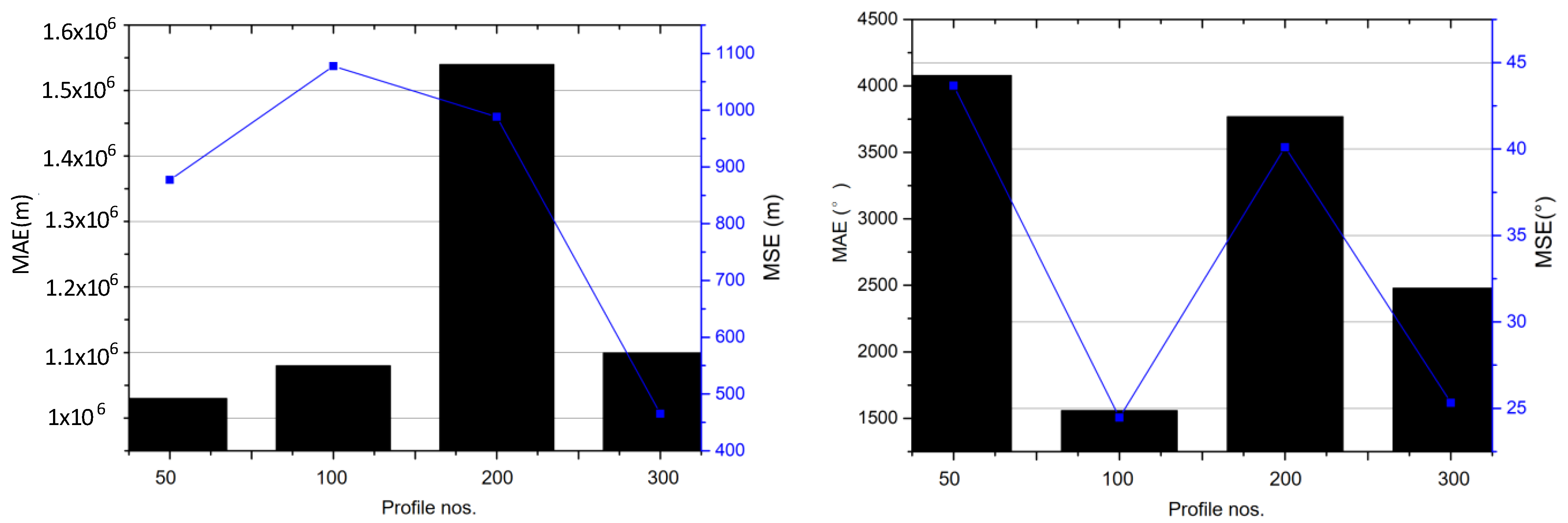
4.3. Data Analysis and Verification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Henry, S. The Slocum mission. Oceanography 1989, 2, 22–25. [Google Scholar]
- Zhang, R.; Yang, S.; Wang, Y.; Wang, S.; Gao, Z.; Luo, C. Three-dimensional regional oceanic element field reconstruction with multiple underwater gliders in the Northern South China Sea. Appl. Ocean Res. 2020, 105, 102405. [Google Scholar] [CrossRef]
- Ma, W.; Wang, Y.; Yang, S.; Wang, S.; Xue, Z. Observation of internal solitary waves using an underwater glider in the northern South China Sea. J. Coastal Res. 2018, 5, 1188–1195. [Google Scholar] [CrossRef]
- Dong, J.; Domingues, R.; Goni, G.; Halliwell, G.; Kim, H.-S.; Lee, S.-K.; Mehari, M.; Bringas, F.; Morell, J.; Pomales, L. Impact of assimilating underwater glider data on hurricane Gonzalo (2014) forecast. Weather Forecast. 2017, 32, 1143–1159. [Google Scholar] [CrossRef]
- Wu, D.; Zhao, Y.; Capozzi, B. Fundamental surface trajectory models for air traffic automation. In Proceedings of the Conference on 10th AIAA Aviation Technology, Integration, & Operations, Fort Worth, TX, USA, 13–15 September 2010. [Google Scholar]
- Best, G.; Fitch, R. Bayesian intention inference for trajectory prediction with an unknown goal destination. In Proceedings of the Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Xie, G.; Gao, H.; Qian, L.; Huang, B.; Li, K.; Wang, J. Vehicle trajectory prediction by integrating physics- and maneuver-based approaches using interactive multiple models. IEEE Trans. Ind. Electron. 2018, 7, 5999–6008. [Google Scholar] [CrossRef]
- Quan, B.; Yang, B.; Hu, K.; Guo, C.; Qin, L. Prediction model of ship trajectory based on LSTM. Comput. Sci. 2018, 0z2, 126–131. [Google Scholar]
- Lin, Y.; Zhang, J.; Liu, H. An algorithm for trajectory prediction of flight plan based on relative motion between positions. Front. Inform. Techol. Electron. Eng. 2018, 7, 905–916. [Google Scholar] [CrossRef]
- Peng, X.; Zhang, B.; Zhou, H. An improved particle swarm optimization algorithm applied to long short-term memory neural network for ship motion attitude prediction. Trans. Inst. Meas. Control 2019, 15, 4462–4471. [Google Scholar] [CrossRef]
- Xiao, Z.; Li, P.; Havyarimana, V.; Hassana, G.M.; Wang, D.; Li, K. GOI: A novel design for vehicle positioning and trajectory prediction under urban environments. IEEE Sens. J. 2018, 18, 5586–5594. [Google Scholar] [CrossRef]
- Gao, H.; Su, H.; Cai, Y.; Wu, R.; Hao, Z.; Xu, Y.; Wu, W.; Wang, J.; Li, Z.; Kan, Z. Trajectory prediction of cyclist based on dynamic bayesian network and Long Short-Term Memory model at unsignalized intersections. Sci. China Inf. Sci. 2021, 64, 172207. [Google Scholar] [CrossRef]
- Ngo, P.; Al-Sabban, W.; Thomas, J.; Anderson, W.; Das, J.; Smith, R.N. An analysis of regression models for predicting the speed of a wave glider autonomous surface vehicle. In Proceedings of the Australasian Conference on Robotics and Automation, Sydney, NSW, Australia, 2–4 December 2013. [Google Scholar]
- Ngo, P.; Das, J.; Ogle, J.; Thomas, J.; Anderson, W.; Smith, R.N. Predicting the speed of a wave glider autonomous surface vehicle from wave model data. In Proceedings of the Conference on Intelligent Robots and Systems (IROS 2014), Chicago, IL, USA, 14–18 September 2014; pp. 2250–2256. [Google Scholar]
- Anitha, E.B.; Duraiswamy, K. A new hybrid approach for prediction of moving vehicle location using particle swarm optimization and neural network. J. Theor. Appl. Inform. Technol. 2014, 3, 791–800. [Google Scholar]
- Shen, X.; Zheng, Y.; Zhang, R. A hybrid forecasting model for the velocity of hybrid robotic fish based on back-propagation neural network with genetic algorithm optimization. IEEE Access 2020, 8, 111731–111741. [Google Scholar] [CrossRef]
- Havyarimana, V.; Hanyurwimfura, D.; Nsengiyumva, P.; Xiao, Z. A novel hybrid approach based-SRG model for vehicle position prediction in multi-GPS outage conditions. Inform. Fusion 2017, 41, 1–8. [Google Scholar] [CrossRef]
- Chassignet, E.P.; Hurlburt, H.E.; Smedstad, O.M.; Halliwell, G.R.; Hogan, P.J.; Wallcraft, A.J.; Baraille, R.; Bleck, R. The HYCOM (HYbrid Coordinate Ocean Model) data assimilative system. J. Marine Syst. 2007, 65, 60–83. [Google Scholar] [CrossRef]
- Yang, M.; Wang, Y.; Wang, S.; Yang, S.; Song, Y.; Zhang, L. Motion parameter optimization for gliding strategy analysis of underwater gliders. Ocean Eng. 2019, 191, 106502. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, S. Glider. In Encyclopedia of Ocean Engineering; Cui, W., Fu, S., Hu, Z., Eds.; Springer: Singapore, 2019; pp. 1–12. [Google Scholar]
- Hoerl, A.E.; Robert, W.K. Ridge regression: Biased estimation for nonorthogonal problems. Technometrics 1970, 1, 55–67. [Google Scholar] [CrossRef]
- Tibshirani, R. Regression shrinkage and selection via the lasso. J. R. Stat. Soc. Ser. B. 1996, 1, 267–288. [Google Scholar] [CrossRef]
- Zou, H.; Trevor, H. Regularization and variable selection via the elastic net. J. R. Stat. Soc. Ser. B 2005, 2, 301–320. [Google Scholar] [CrossRef]
- Zhu, M.; Hahn, A.; Wen, Y.-Q.; Sun, W.-Q. Optimized Support vector regression algorithm-based modeling of ship dynamics. Appl. Ocean Res. 2019, 90, 101842. [Google Scholar] [CrossRef]
- Deng, H.; Liu, Y.; Li, P.; Zhang, S. Whole flow field performance prediction by impeller parameters of centrifugal pumps using support vector regression. Adv. Eng. Softw. 2017, 114, 258–267. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, Q.; Li, F. Application of online multitask learning based on least squares support vector regression in the financial market. Appl. Soft. Comput. 2022, 121, 108754. [Google Scholar] [CrossRef]
- MMR Tabari, H.R.Z. Sanayei. Prediction of the intermediate block displacement of the dam crest using artificial neural network and support vector regression models. Soft. Comput. 2019, 29, 9629–9645. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 6088, 533–536. [Google Scholar] [CrossRef]
- Jiang, L.; Xue, H.; Li, R.; Wu, J. A KNN composite-based piezoelectric helix for ultrasonic transcutaneous energy harvesting. Appl. Phys. Lett. 2022, 23, 120. [Google Scholar] [CrossRef]
- Khan, S.; Grudniewski, P.; Muhammad, Y.S.; Sobey, A.J. The benefits of co-evolutionary Genetic Algorithms in voyage optimisation. Ocean Eng. 2022, 245, 110261. [Google Scholar] [CrossRef]
- Li, G.; Chou, W. Path planning for mobile robot using self-Adaptive learning particle swarm optimization. Sci. China Inf. Sci. 2018, 5, 52204. [Google Scholar] [CrossRef]
- Regier, P.; Duggan, M.; Myers-Pigg, A.; Ward, N. Effects of random forest modeling decisions on biogeochemical time series predictions. Limnol. Oceanog. Methods 2022, 21, 40–52. [Google Scholar] [CrossRef]
- Abramowicz, K.; Sara, S.; Strandberg, J. Nonparametric bagging clustering methods to identify latent structures from a sequence of dependent categorical data. Comput. Stat. Data Anal. 2023, 177, 107583. [Google Scholar] [CrossRef]
- Su, S.; Li, W.; Garg, A.; Gao, L. An adaptive boosting charging strategy optimization based on thermoelectric-aging model, surrogates and multi-objective optimization. Appl. Energ. 2022, 312, 118795. [Google Scholar] [CrossRef]
- Chen, T.; Carlos, G. Xgboost: A scalable tree boosting system. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13 August 2017; pp. 785–794. [Google Scholar]
- Ren, Q.; Li, M.; Song, L.; Liu, H. An optimized combination prediction model for concrete dam deformation considering quantitative evaluation and hysteresis correction. Adv. Eng. Inform. 2020, 46, 101154. [Google Scholar] [CrossRef]
- Yin, J.; Zou, Z.; Feng, X. On-line prediction of ship roll motion during maneuvering using sequential learning RBF neural networks. Ocean Eng. 2013, 61, 139–147. [Google Scholar] [CrossRef]
- Oezger, M. Significant wave height forecasting using wavelet fuzzy logic approach. Ocean Eng. 2010, 37, 1443–1451. [Google Scholar] [CrossRef]
- Lu, G.; Wong, D. An adaptive inverse-distance weighting spatial interpolation technique. Comput. Geosci. 2008, 9, 1044–1055. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Specification | Value/Instrument |
|---|---|
| Size | Diameter 240 mm, length 2600 mm, wingspan 1200 mm |
| Weight | 93 kg |
| Depth | 1000 m |
| Battery | Lithium primary batteries |
| Range | >3000 km |
| Navigation | GPS, pressure sensor, altimeter and compass |
| Sensor | CTD (conductivity, temperature, pressure) |
| Information | CHC15 |
|---|---|
| Deployment time (UTC+8) | 2019.07.27 10:30:20 |
| Recovery time (UTC+8) | 2020.04.23 09:02:47 |
| Deployment point | 111.7130° E/18.0208° N |
| Recovery point | 112.6244° E/17.8330° N |
| Averaged depth (m) | 931.2 |
| Profile range in the study | Profile 78 to profile 436 |
| Input Parameters | Preset Heading | Preset Depth | Preset Pitch | Preset Buoyancy | Ocean Current |
|---|---|---|---|---|---|
| Output parameters | Real heading | Real distance | |||
| Profile Number | Longitude /° | Latitude /° | Ocean Current Value /(m/s) | Ocean Current Direction /° | Preset Heading /° | Preset Depth /m | Preset Pitch /° | Preset Buoyancy/% | Real Distance /m | Real Heading /° |
|---|---|---|---|---|---|---|---|---|---|---|
| 83 | 114.51 | 17.84 | 0.10 | 310 | 129.60 | 980 | 25 | 86 | 2823.26 | 91.19 |
| 84 | 114.53 | 17.82 | 0.10 | 310 | 83.90 | 980 | 25 | 86 | 2936.89 | 138.76 |
| 85 | 114.57 | 17.84 | 0.10 | 310 | 90.50 | 980 | 25 | 90 | 4925.67 | 64.67 |
| 86 | 114.61 | 17.85 | 0.11 | 310 | 96.10 | 980 | 25 | 87 | 3972.10 | 74.93 |
| 87 | 114.64 | 17.86 | 0.11 | 310 | 104.90 | 980 | 25 | 89 | 3260.14 | 73.70 |
| 88 | 114.67 | 17.87 | 0.10 | 310 | 119.60 | 980 | 26 | 88 | 3019.21 | 75.28 |
| 89 | 114.70 | 17.86 | 0.10 | 310 | 156.70 | 980 | 25 | 88 | 4064.44 | 93.32 |
| 90 | 114.71 | 17.84 | 0.11 | 310 | 141.30 | 980 | 26 | 90 | 2841.88 | 156.48 |
| 91 | 114.74 | 17.83 | 0.12 | 315 | 81.40 | 980 | 26 | 90 | 3335.64 | 120.00 |
| 92 | 114.77 | 17.85 | 0.12 | 310 | 89.20 | 980 | 26 | 87 | 4296.73 | 57.19 |
| 93 | 114.81 | 17.87 | 0.12 | 310 | 103.00 | 980 | 25 | 87 | 4169.03 | 52.88 |
| 94 | 114.85 | 17.88 | 0.13 | 310 | 119.70 | 980 | 26 | 89 | 4569.70 | 78.47 |
| Profile Nos. | Index | LR | RR | LAR | EN | PR | DT | RF | BAG | ADABT | GDBT | XGBT | SVR | GASVR | KNNR | BPNN | GABPNN | PSOBPNN |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 50 | MAE /° | 44.57 | 40.86 | 40.29 | 40.28 | 174.38 | 47.72 | 46.70 | 42.04 | 48.16 | 54.01 | 62.92 | 53.59 | 57.52 | 54.23 | 55.29 | 59.44 | 53.29 |
| 100 | 45.78 | 43.93 | 43.72 | 43.67 | 213.02 | 48.29 | 47.37 | 40.18 | 47.33 | 50.64 | 97.30 | 28.63 | 28.35 | 34.16 | 24.91 | 17.57 | 21.19 | |
| 200 | 46.99 | 46.99 | 47.16 | 47.07 | 251.67 | 48.86 | 48.03 | 38.32 | 46.57 | 46.59 | 59.79 | 60.95 | 52.38 | 45.57 | 61.45 | 53.79 | 62.51 | |
| 300 | 33.17 | 33.16 | 33.15 | 33.25 | 139.71 | 37.03 | 35.76 | 25.78 | 35.80 | 34.99 | 44.41 | 80.23 | 61.77 | 58.78 | 40.59 | 68.96 | 65.68 | |
| 50 | RMSE /° | 49.38 | 47.93 | 47.20 | 47.05 | 100.54 | 43.83 | 44.31 | 47.56 | 53.04 | 57.75 | 62.04 | 40.60 | 44.18 | 44.37 | 40.83 | 45.01 | 43.08 |
| 100 | 131.92 | 206.54 | 131.92 | 131.92 | 316.33 | 62.24 | 56.70 | 42.49 | 49.00 | 52.57 | 65.90 | 34.16 | 31.87 | 36.05 | 33.77 | 26.86 | 31.17 | |
| 200 | 45.36 | 45.36 | 45.04 | 44.88 | 103.74 | 37.27 | 36.60 | 41.44 | 43.69 | 43.88 | 56.25 | 41.08 | 39.87 | 37.86 | 48.37 | 37.06 | 40.43 | |
| 300 | 32.77 | 32.69 | 32.75 | 32.63 | 51.86 | 27.87 | 26.75 | 26.52 | 33.92 | 33.66 | 50.17 | 47.66 | 38.90 | 34.38 | 36.11 | 38.57 | 40.39 | |
| 50 | R2 | 0.50 | 0.71 | 0.72 | 0.76 | 0.23 | 0.49 | 0.50 | 0.50 | 0.48 | 0.40 | 0.52 | 0.51 | 0.41 | 0.48 | 0.50 | 0.49 | 0.50 |
| 100 | 0.08 | 0.06 | 0.08 | 0.08 | 0.08 | 0.03 | 0.08 | 0.44 | 0.47 | 0.47 | 0.18 | 0.70 | 0.66 | 0.59 | 0.76 | 0.78 | 0.74 | |
| 200 | 0.53 | 0.53 | 0.53 | 0.53 | 0.21 | 0.54 | 0.54 | 0.63 | 0.54 | 0.54 | 0.53 | 0.47 | 0.52 | 0.57 | 0.41 | 0.51 | 0.46 | |
| 300 | 0.63 | 0.63 | 0.63 | 0.63 | 0.18 | 0.63 | 0.63 | 0.72 | 0.61 | 0.61 | 0.63 | 0.34 | 0.43 | 0.43 | 0.55 | 0.38 | 0.41 |
| Profile Nos. | Index | LR | RR | LAR | EN | PR | DT | RF | BAG | ADABT | GDBT | XGBT | SVR | GA-SVR | KNNR | BPNN | GA-BPNN | PSO-BPNN |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 50 | MAE /m | 751.40 | 755.60 | 753.41 | 769.86 | 1750.90 | 819.42 | 785.61 | 974.62 | 706.25 | 762.99 | 771.85 | 1357.99 | 1060.60 | 1097.58 | 1038.14 | 1219.88 | 1274.62 |
| 100 | 1106.57 | 981.53 | 1101.08 | 1047.42 | 2130.29 | 955.07 | 1077.69 | 1009.94 | 1056.71 | 1120.31 | 1496.06 | 1480.52 | 1115.84 | 1223.84 | 1085.33 | 1293.05 | 1246.75 | |
| 200 | 1180.34 | 1178.04 | 1179.22 | 1177.64 | 2323.60 | 1180.01 | 1163.06 | 1078.59 | 1162.95 | 1145.43 | 1194.10 | 1207.19 | 967.26 | 1085.22 | 988.93 | 1037.60 | 1113.69 | |
| 300 | 775.59 | 775.60 | 775.59 | 776.00 | 561.33 | 792.84 | 785.94 | 433.35 | 789.61 | 786.54 | 774.00 | 723.91 | 255.19 | 380.22 | 471.77 | 354.71 | 413.08 | |
| 50 | RMSE /m | 872.98 | 887.27 | 878.54 | 903.14 | 1560.70 | 939.48 | 913.02 | 1044.72 | 862.41 | 903.75 | 900.08 | 1395.68 | 1089.49 | 1112.71 | 1079.10 | 1236.47 | 1280.94 |
| 100 | 1010.00 | 1131.00 | 1061.00 | 998.00 | 2343.00 | 1106.00 | 996.00 | 1050.00 | 1089.20 | 1129.40 | 1318.51 | 1333.23 | 1076.97 | 1178.29 | 1026.50 | 1185.60 | 1157.26 | |
| 200 | 1164.46 | 1158.09 | 1161.40 | 1152.51 | 5830.42 | 1147.81 | 1132.27 | 1050.31 | 1168.15 | 1152.93 | 1175.38 | 1155.14 | 920.72 | 1058.68 | 1012.25 | 971.93 | 1005.94 | |
| 300 | 764.41 | 764.37 | 764.41 | 765.22 | 669.17 | 762.86 | 750.90 | 605.98 | 802.22 | 788.50 | 762.40 | 751.08 | 440.54 | 537.54 | 650.24 | 562.80 | 584.61 | |
| 50 | R2 | 0.59 | 0.58 | 0.58 | 0.16 | 0.11 | 0.12 | 0.14 | 0.08 | 0.19 | 0.14 | 0.17 | 0.00 | 0.06 | 0.07 | 0.07 | 0.03 | 0.04 |
| 100 | 0.25 | 0.25 | 0.25 | 0.25 | 0.25 | 0.09 | 0.55 | 0.02 | 0.12 | 0.07 | 0.22 | 0.00 | 0.07 | 0.02 | 0.08 | 0.00 | 0.04 | |
| 200 | 0.10 | 0.10 | 0.10 | 0.10 | 0.13 | 0.11 | 0.52 | 0.19 | 0.11 | 0.13 | 0.10 | 0.16 | 0.72 | 0.20 | 0.31 | 0.26 | 0.21 | |
| 300 | 0.20 | 0.20 | 0.20 | 0.20 | 0.49 | 0.18 | 0.80 | 0.64 | 0.16 | 0.17 | 0.20 | 0.62 | 0.80 | 0.68 | 0.64 | 0.71 | 0.70 |
| Profile Nos. | Distance | Heading | ||||
|---|---|---|---|---|---|---|
| LR | RF | GASVR | EN | GABPNN | BAG | |
| 50 | 0.753 | 0.146 | 0.101 | 0.759 | 0.150 | 0.091 |
| 100 | 0.093 | 0.882 | 0.025 | 0.040 | 0.877 | 0.083 |
| 200 | 0.092 | 0.211 | 0.697 | 0.013 | 0.086 | 0.901 |
| 300 | 0.139 | 0.160 | 0.701 | 0.103 | 0.047 | 0.850 |
| Profile Nos. | Distance | Heading | ||||
|---|---|---|---|---|---|---|
| MAE/m | MSE/m | R2 | MAE/° | MSE/° | R2 | |
| 50 | 747.11 | 866.54 | 0.75 | 40.12 | 43.66 | 0.67 |
| 100 | 945.02 | 907.74 | 0.69 | 17.57 | 26.46 | 0.73 |
| 200 | 966.87 | 969.50 | 0.81 | 37.33 | 36.11 | 0.78 |
| 300 | 254.36 | 445.02 | 0.78 | 25.60 | 25.32 | 0.71 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Niu, W.; Wan, X.; Wu, Y.; Xue, D.; Yang, S. Surfacing Positioning Point Prediction of Underwater Glider with a New Combination Model. J. Mar. Sci. Eng. 2023, 11, 972. https://doi.org/10.3390/jmse11050972
Zhang R, Niu W, Wan X, Wu Y, Xue D, Yang S. Surfacing Positioning Point Prediction of Underwater Glider with a New Combination Model. Journal of Marine Science and Engineering. 2023; 11(5):972. https://doi.org/10.3390/jmse11050972
Chicago/Turabian StyleZhang, Runfeng, Wendong Niu, Xu Wan, Yining Wu, Dongyang Xue, and Shaoqiong Yang. 2023. "Surfacing Positioning Point Prediction of Underwater Glider with a New Combination Model" Journal of Marine Science and Engineering 11, no. 5: 972. https://doi.org/10.3390/jmse11050972
APA StyleZhang, R., Niu, W., Wan, X., Wu, Y., Xue, D., & Yang, S. (2023). Surfacing Positioning Point Prediction of Underwater Glider with a New Combination Model. Journal of Marine Science and Engineering, 11(5), 972. https://doi.org/10.3390/jmse11050972