

On Boundary Conditions for Damage Openings in RoPax-Ship Survivability Computations
Abstract
1. Introduction
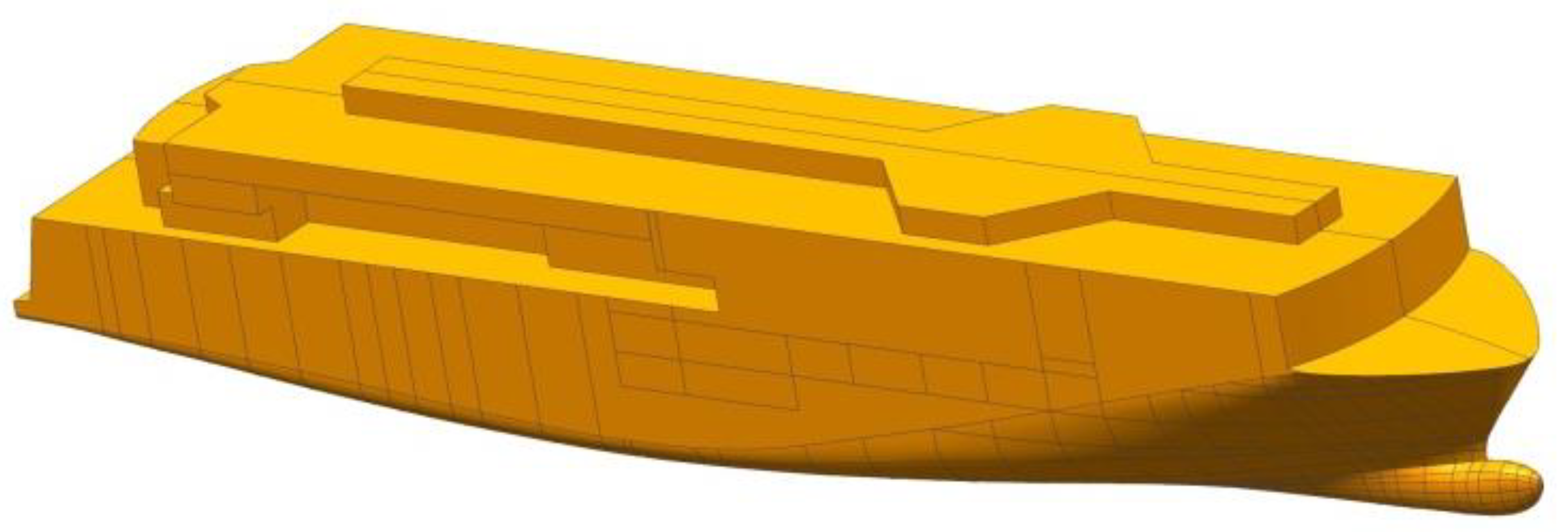
2. General Description of the RoPax Vessel
3. Observations from Model Tests and Simulations
3.1. Introduction
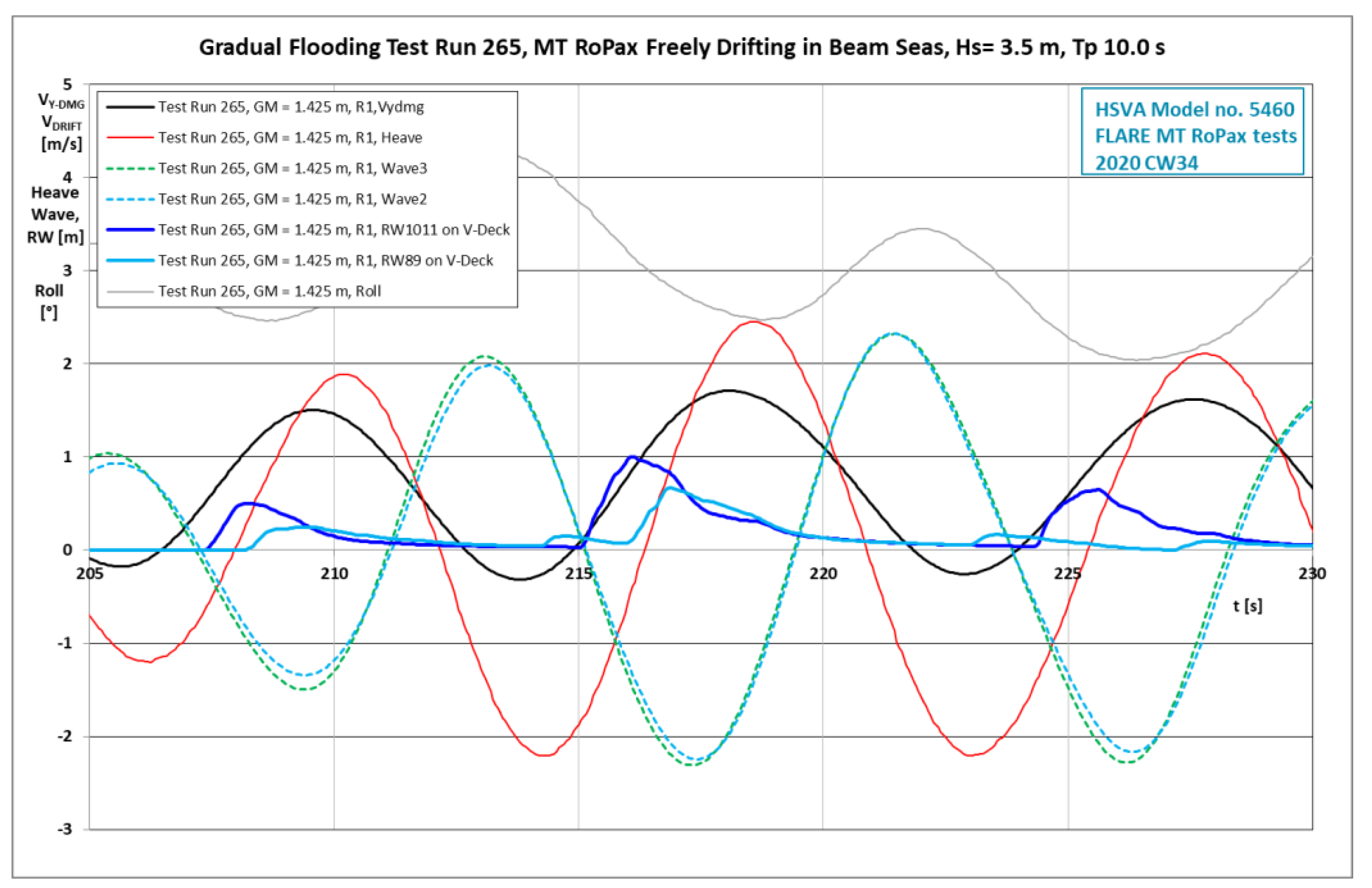
3.2. Difference in Capsize Rate of a Damaged RoPax Ship in Beam Seas between Free-Drifting and Soft-Moored Condition in Model Tests
3.3. Effect of Ship Motion on Floodwater Flow through a Damage Opening during a Wave Cycle
- (1)
- We assume the flow to be unsteady due to rapidly varying pressure heads on both sides of the opening and also due to the horizontal acceleration of the damage opening on the ship side itself. For this, the dynamic orifice equation by Lee [3] can be extended and applied.
- (2)
- In the case of a transom stern, the speed of the ship leads to a lower water level at the transom. Thus, in analogy, for a ship drifting in beam seas, depending on the combination of sway and drift speeds, the average water level on the ship side should be slightly lower on the wave side and slightly higher on the lee side. This should have a small effect on the pressure head just outside the damage opening, which can be taken into account in modeling the inflow through the damage opening.
4. Steps towards Better Inflow/Outflow Boundary Condition for the Flow on the Vehicle Deck of a Damaged RoPax Ship in Waves
4.1. The Bernoulli Equation vs. the Dynamic Orifice Equation
4.2. The Inflow/Outflow Flow Mechanism on the Vehicle Deck as Observed in Model Tests
- (1)
- In regular beam waves, the wave crests hit the ship side and water flows through the damage opening onto the vehicle deck of the RoPax ship and, of course, also into the damaged compartments below. Once the crest has passed the damaged ship side, the water on the vehicle deck flows back along the downwardly inclined deck towards the damage opening and further through the opening out of the vehicle deck. With the next regular wave, this process is repeated anew.
- (2)
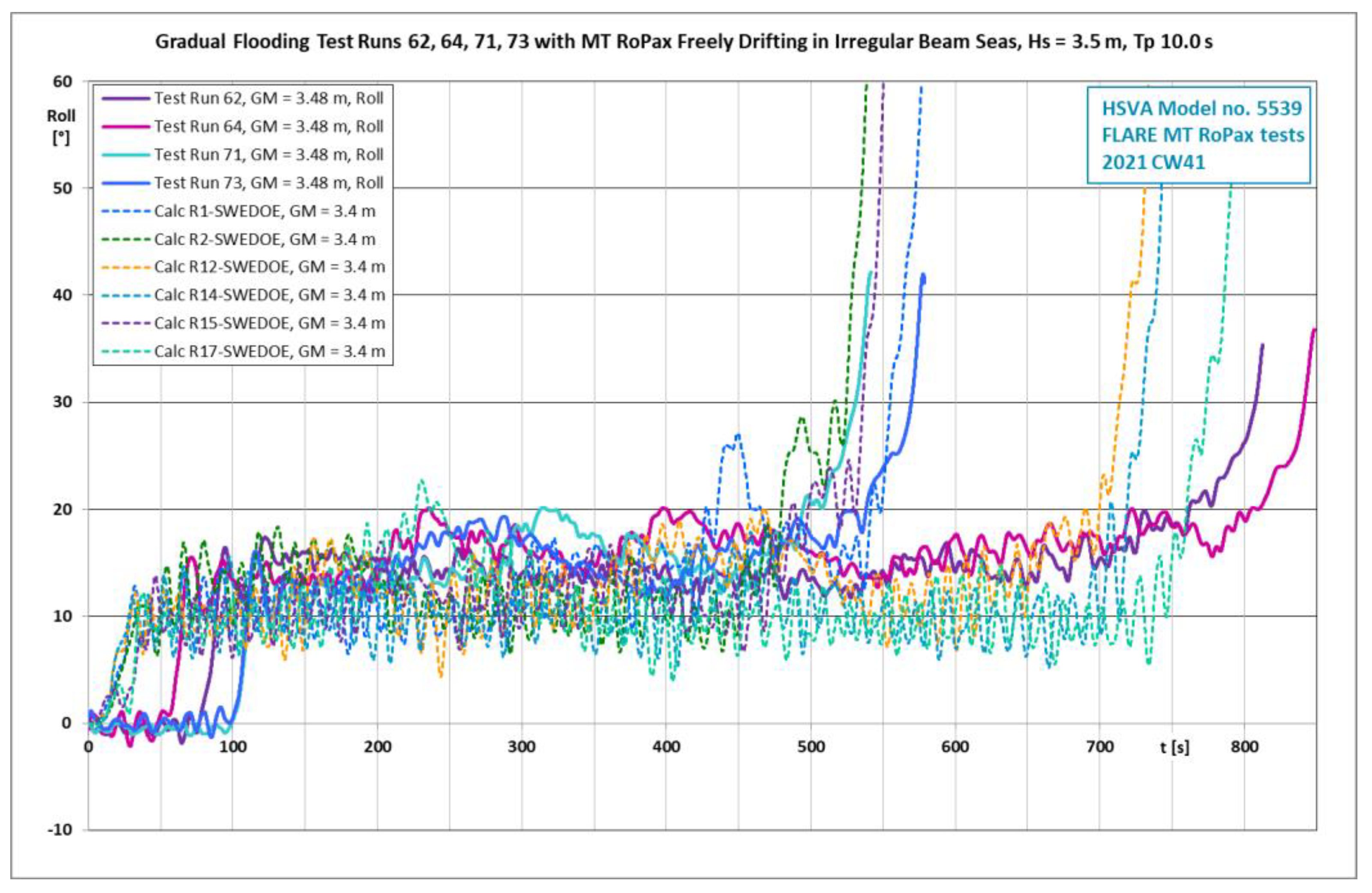
- In irregular beam seas, the highest wave crests bring water onto the vehicle deck and into the damaged compartments below. In between these high wave crests there are lower wave crests and wave troughs, which do not bring any water onto the vehicle deck, as the water elevation at the damage opening does not reach the vehicle deck level at the opening. During these relatively long periods between higher wave crests, the floodwater mostly flows along the inclined vehicle deck out of the damage opening back to the sea.
4.3. Outflow through the Damage Opening on the Heeled Vehicle Deck
4.4. Formulations for Floodwater Discharge at the Damage Opening
4.5. Improved Boundary Condition for the Damage Opening to an Open Deck
- (1)
- The roll or heeling angle is negative or zero. The floodwater flows from the damage opening on the starboard side towards the center casing.The flow speed at the damage opening is determined with Bernoulli Equation or with Dynamic Orifice Equation, and the change in the linear momentum due to the water inflow in the opening is taken into account as a boundary condition in the numerical solution of the SWE on the vehicle deck. As water outside the damage opening can be assumed to have practically zero speed, this formulation is a quite proper and suitable approximation. This, along with BE, is the original model in HSVA Rolls.
- (2)
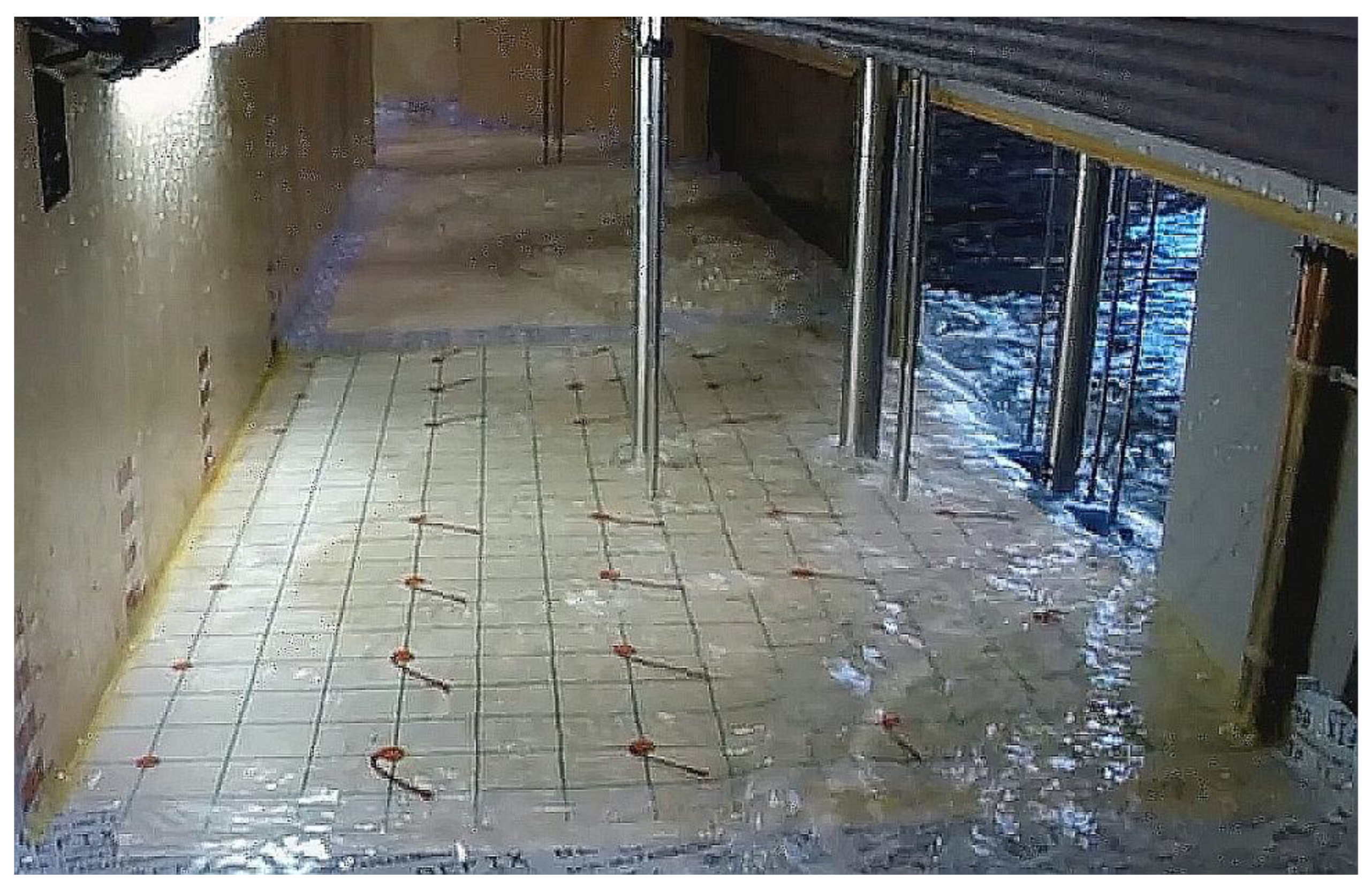
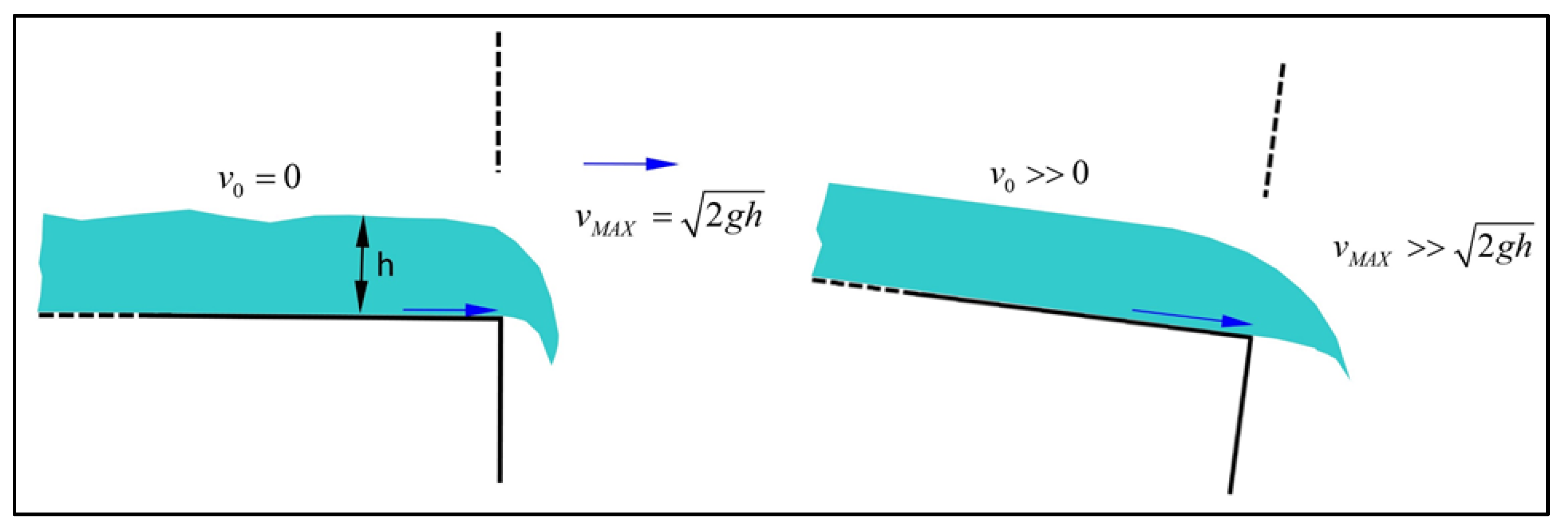
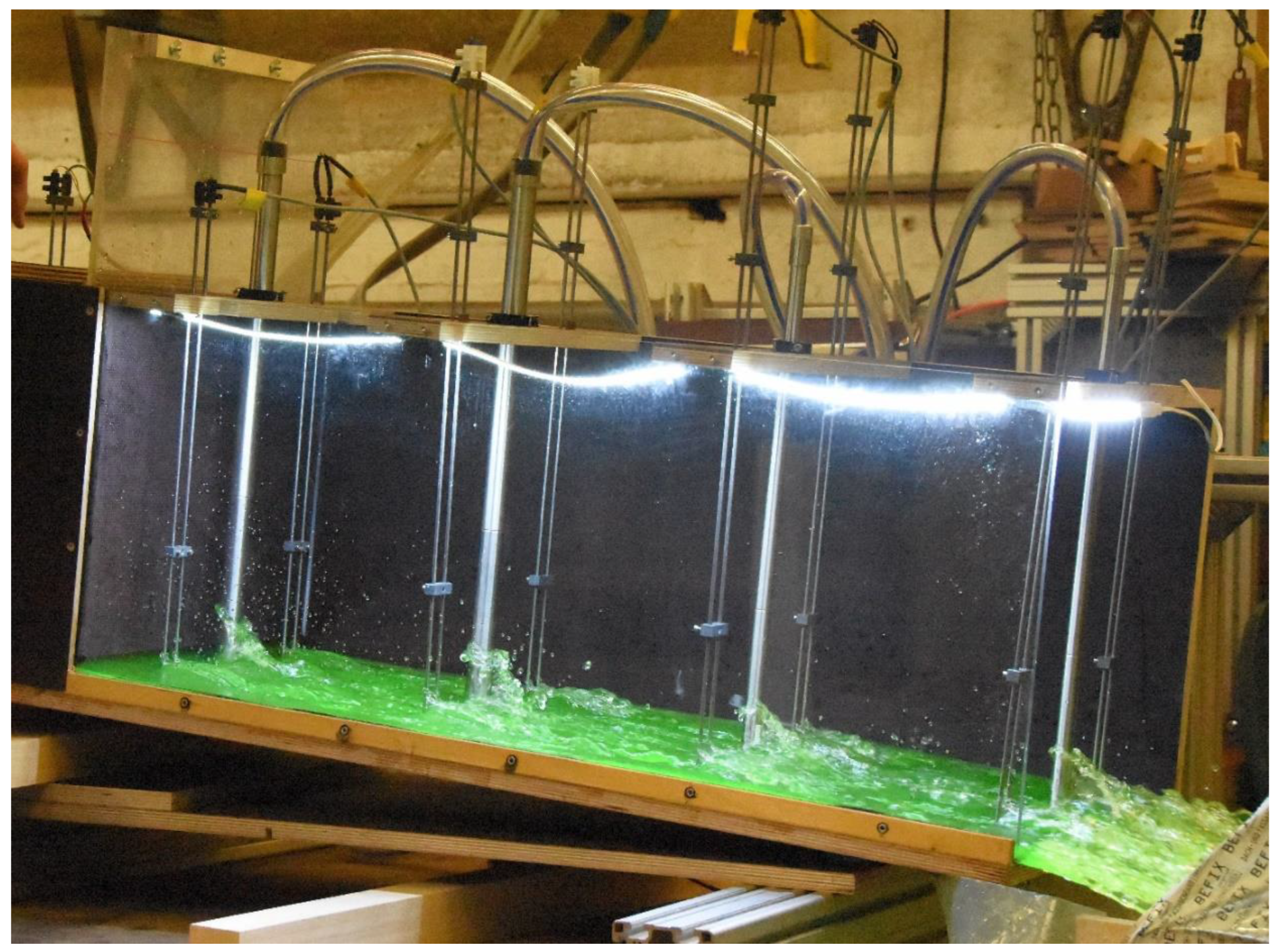
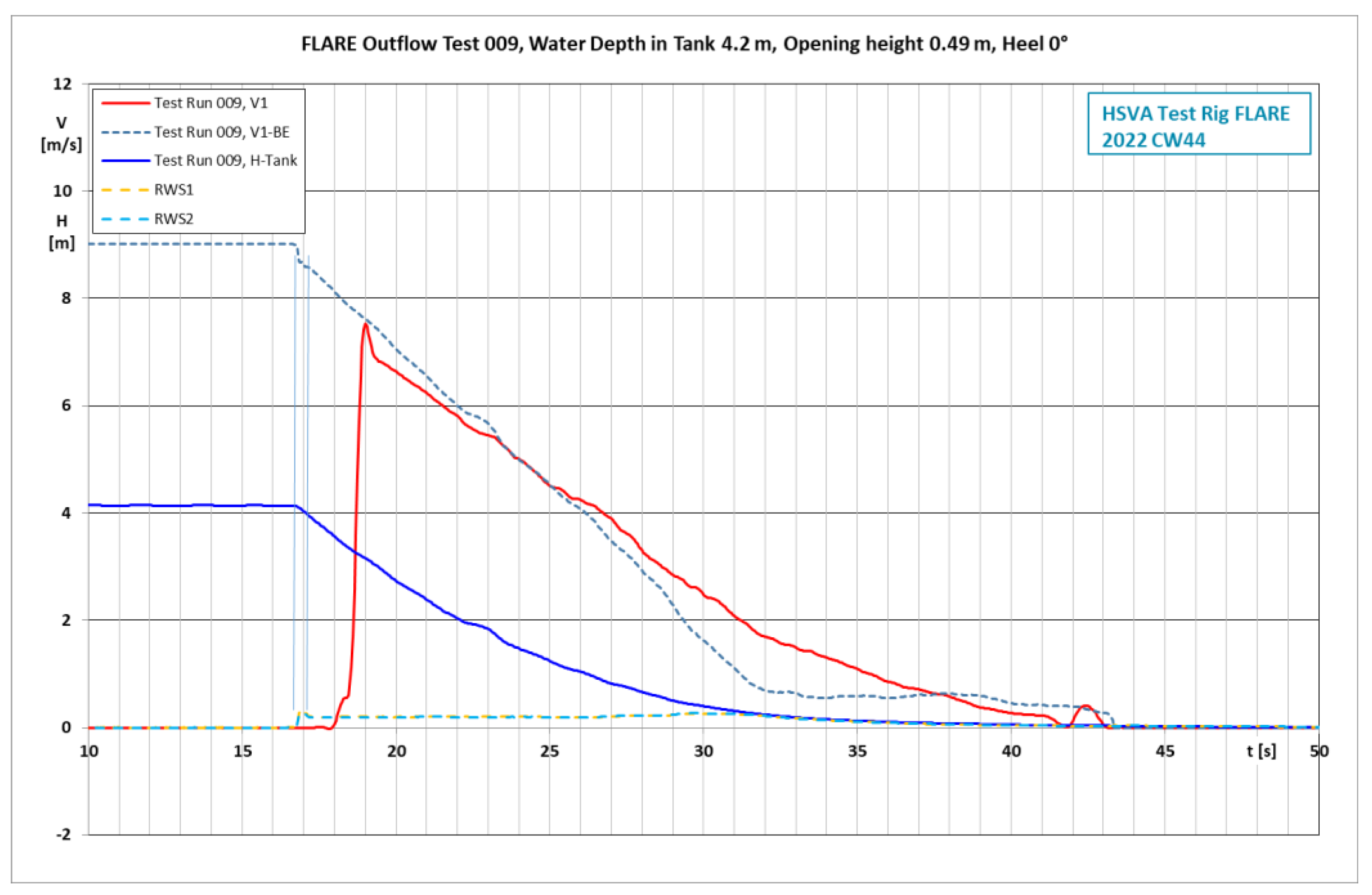
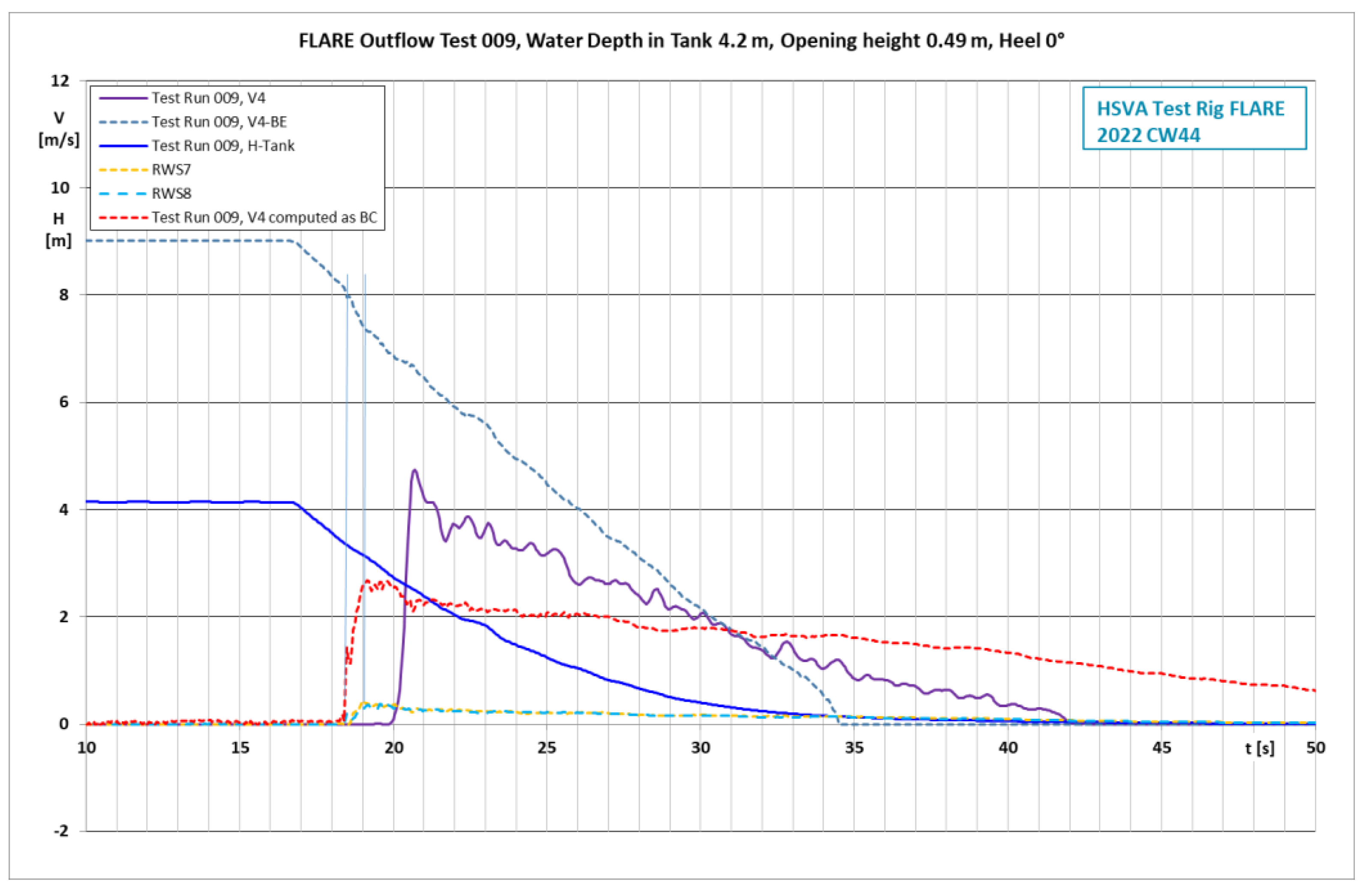
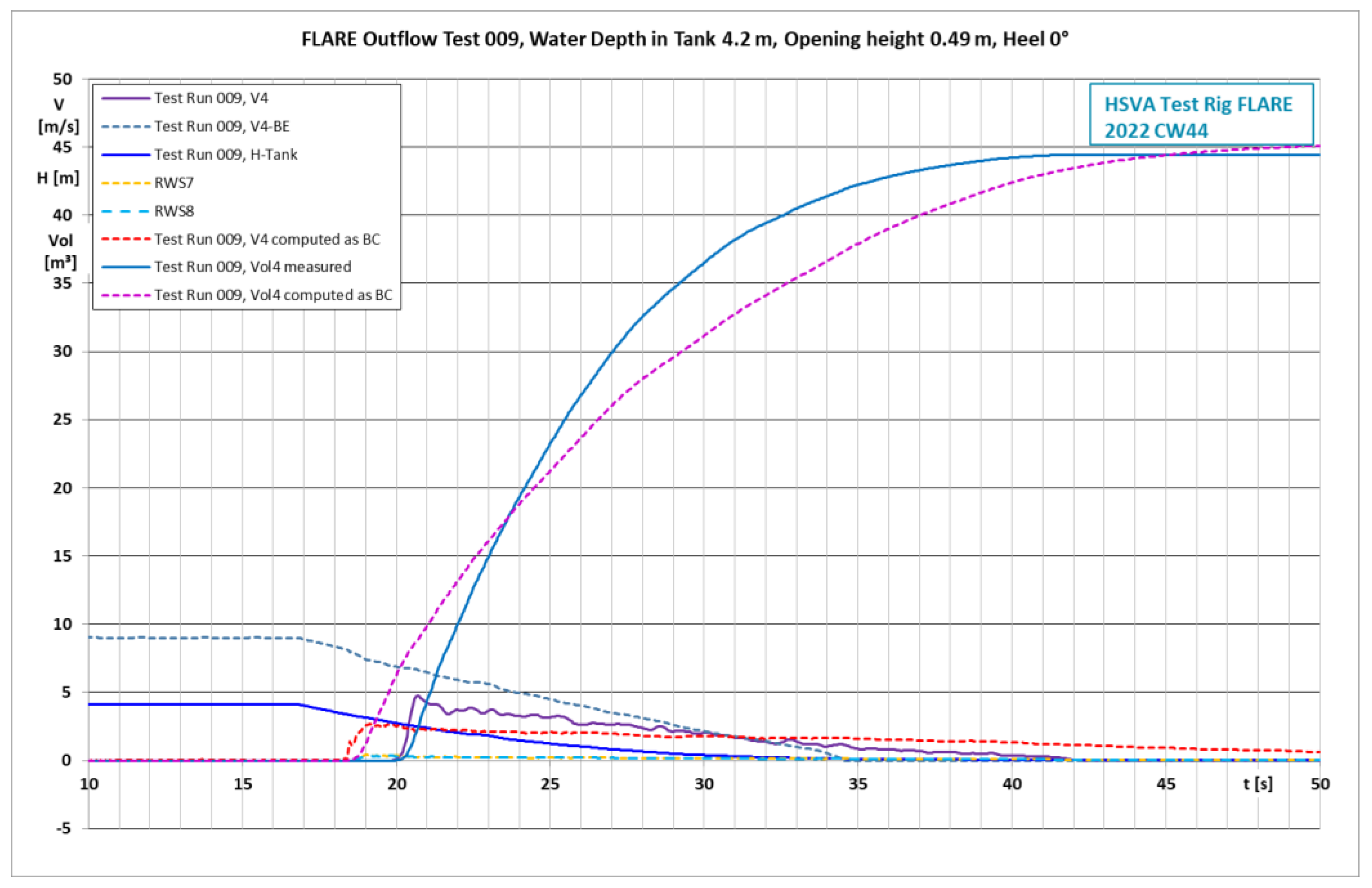
- The roll or heeling angle is positive. The floodwater flows from the inner parts of the vehicle deck downward along the inclined deck to the damage opening and further out to the sea below.In this case the floodwater on the deck as a shallow-water layer can develop a significant speed towards the damage opening. This can be seen in model tests with a RoPax ship with side damage in beam seas. The measured flow speed data obtained with a test rig can be found in Appendix A. In numerical simulations the flow speed on the inclined deck can be determined with SWE. The speed at the damage opening can be taken as a combination of the speed given by the SWE and that given by the BE or DOE based on the water level difference in the opening.With this boundary condition in the numerical solution, the floodwater flowing down along the inclined vehicle deck can be better taken into account than solely with BE or DOE. The modeling should be particularly important in irregular seas, in which there are long periods of floodwater outflow between the occasional higher wave crests that bring water onto the vehicle deck.
5. Comparison of the Computed Results with FLARE Benchmark Test Experimental Data
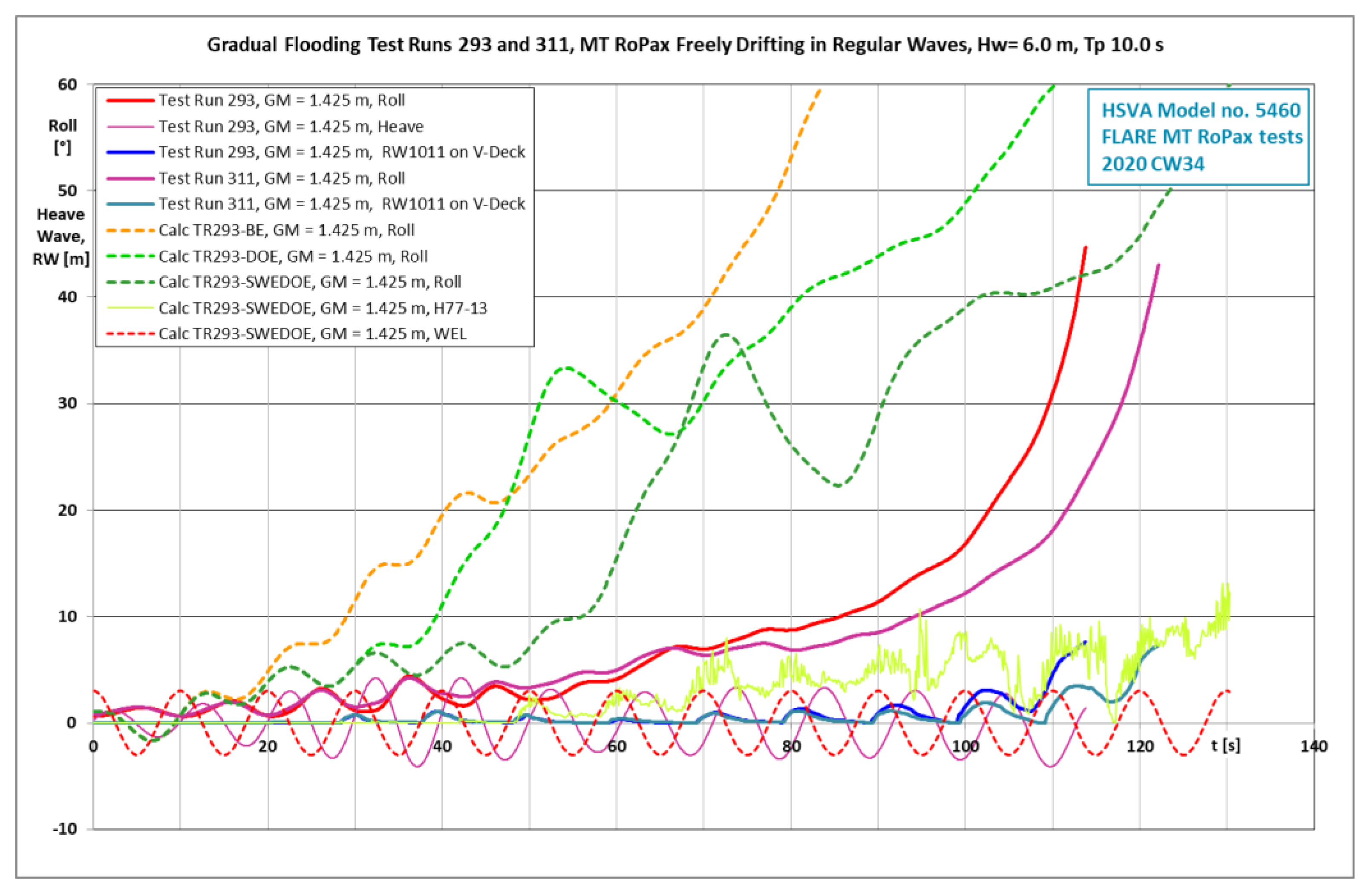
- The use of the BE as a boundary condition is easy, and the ship heeling process is in this case quite linear. Using the classical value for the discharge coefficient (0.6) leads to too short a time to capsize. With reduction of the value of the discharge coefficient, the TTC could be prolonged. This may lead to practical results, but it does not reflect the prevailing physics too well.
- The use of the DOE as a boundary condition requires time-integration of the floodwater discharge through the damage opening simultaneously with the time-integration of the ship motions in the simulation program. The programmed boundary condition tested gives the discharge in the opening also as a function of the ship horizontal and transverse acceleration and speed at the damage opening. Thus, the lateral ship motions influence the flow in the opening, which appears to lead to a less smooth development of the ship roll angle than in the case of the BE. In transient cases the DOE is a much more physically correct boundary condition than the BE. The use of the DOE delays capsizing in comparison with the BE. However, as several ship motion components influence the flow in the damage opening, the flow can also be more easily distorted if the ship motions are not accurately predicted.
- The use of the SWEDOE requires time-integration of the discharge through the damage opening and the input of the flow speed on the vehicle deck into the boundary condition. Also in this formulation, the lateral ship motions are taken into account. In most cases the inclusion of the outflow speed on the inclined deck in the boundary condition reduced the net inflow onto the vehicle deck, delayed capsize, and had a prolonging effect on the time to capsize TTC. Thus, the SWEDOE curve showing the development of the roll angle over time is similar to the DOE curve but more gradual. In some cases, the SWEDOE formulation postpones capsize considerably, when large amounts of floodwater flow out of the vehicle deck.
- The boundary conditions at DOE and SWEDOE yield better values for the Time to Capsize TTC than the BE.
- In the lower sea state with HS 3.5 m, the boundary conditions of DOE and SWEDOE yield better values for the survival rate than the BE. The survival rate given by BE is too low.
- In the higher sea state with HS 7.5 m, the boundary conditions of DOE and SWEDOE yield too high survival rates. In addition, in this case, the BE gives a too low survival rate.
- Thus, the use of the DOE and SWEDOE are certainly steps in the direction of a better boundary condition for the damage openings, but the formulations used in this brief study do not yet lead to very satisfactory results.
6. Comparison of the Computed Results with FLARE Flood Mitigation Test Experimental Data
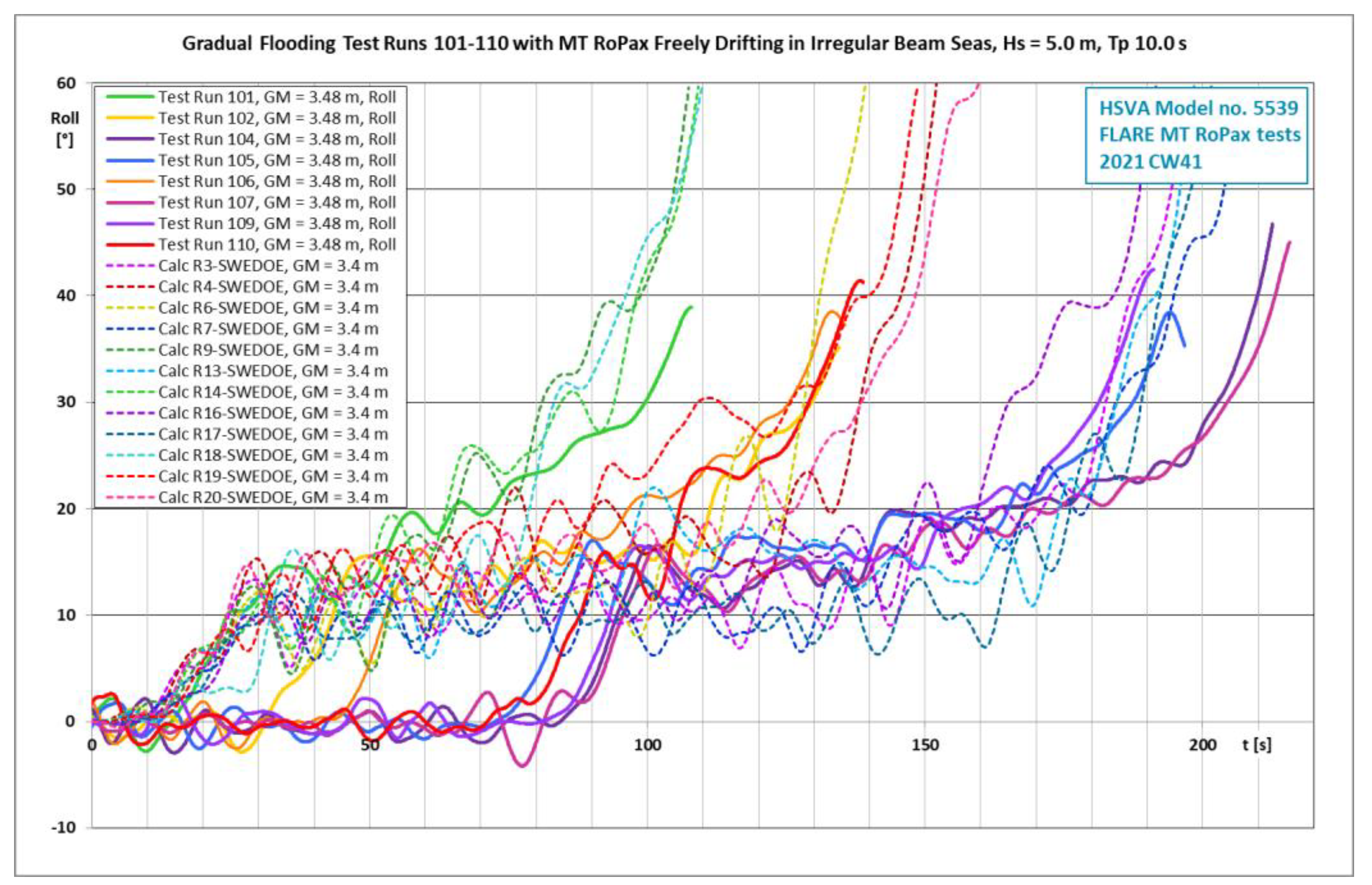
- The boundary conditions at DOE and SWEDOE yield much better values (77.7–93.2%) for the Time to Capsize TTC than the BE (38.0–54.4%).
- In the lower sea state with HS 3.5 m, the boundary conditions of DOE and SWEDOE yield better values for the survival rate than the BE. The survival rate given by BE is too low.
- In the higher sea state with HS 5.0 m, all boundary conditions BE, DOE, and SWEDOE yield zero survival rates, like the experiments do.
- The use of the DOE and SWEDOE are certainly steps in the direction of a better boundary condition for the damage opening to the vehicle deck. In this damage case the results simulated using DOE or SWEDOE are already quite satisfactory.
7. Discussion
8. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Model Tests for Floodwater Outflow







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Water Depth [m] | Heeling Angle [°] | Flow Speed at Sections S1–S4 | |||
|---|---|---|---|---|---|
| V1 [%] | V2 [%] | V3 [%] | V4 [%] | ||
| 0.7 | 0 | 100 | 105 | 94 | 77 |
| 0.7 | 5 | 169 | 162 | 160 | 142 |
| 0.7 | 10 | 197 | 217 | 204 | 193 |
| 0.7 | 15 | 222 | 261 | 139 | 224 |
| 0.7 | 20 | 268 | 300 | 297 | 255 |
| Water Depth [m] | Heeling Angle [°] | Flow Speed at Sections S1–S4 | |||
| V1 [%] | V2 [%] | V3 [%] | V4 [%] | ||
| 2.1 | 0 | 100 | 86 | 85 | 78 |
| 2.1 | 5 | 113 | 112 | 92 | 88 |
| 2.1 | 10 | 118 | 125 | 97 | 103 |
| 2.1 | 15 | 125 | 135 | 117 | 114 |
| 2.1 | 20 | 130 | 144 | 136 | 123 |
| Water Depth [m] | Heeling Angle [°] | Flow Speed at Sections S1–S4 | |||
| V1 [%] | V2 [%] | V3 [%] | V4 [%] | ||
| 4.2 | 0 | 100 | 80 | 75 | 52 |
| 4.2 | 5 | 102 | 95 | 80 | 70 |
| 4.2 | 10 | 105 | 101 | 66 | 78 |
| 4.2 | 15 | 108 | 105 | 91 | 81 |
| 4.2 | 20 | 110 | 107 | 100 | 85 |
Conclusions on the Tests with the Inclined Rig
| 1 | Maritime Safety Research Centre of the University of Strathclyde, UK. |
References
- Ruponen, P.; Valanto, P.; Acanfora, M.; Dankowski, H.; Lee, G.J.; Mauro, F.; Murphy, A.; Rosano, G.; Veer, R.V. Results of an international benchmark study on numerical simulation of flooding and motions of a damaged ropax ship. Appl. Ocean Res. 2022, 123, 103153. [Google Scholar] [CrossRef]
- Ruponen, P.; van Basten Batenburg, R.; van’t Veer, R.; Braidotti, L.; Bu, S.; Dankowski, H.; Lee, G.J.; Mauro, F.; Ruth, E.; Tompuri, M. International benchmark study on numerical simulation of flooding and motions of a damaged cruise ship. Appl. Ocean. Res. 2022, 129, 103403. [Google Scholar] [CrossRef]
- Lee, G.J. Dynamic orifice flow model and compartment models for flooding simulation of a damaged ship. Ocean. Eng. 2015, 109, 635–653. [Google Scholar] [CrossRef]
- Söding, H. Leckstabilität im Seegang; Institut für Schiffbau der Universität Hamburg: Hamburg, Germany, 1982. [Google Scholar]
- Söding, H. Simulation of the Motions of Damaged Ships in Waves. Ph.D. Thesis, DCAMM, Lyngby, Denmark, 2002. [Google Scholar]
- Söding, H.; Schigunov, V.; Zorn, T.; Soukup, P. Method rolls for Simulating Roll Motions of Ships, Ship Technology Research 60(2); University of Duisburg-Essen: Duisburg, Germany, 2013; pp. 70–84. [Google Scholar]
- Valanto, P. Numerical Models—HSVA Rolls, EU-Project Flooding Accident Response (FLARE) Deliverable D4.1-Volume 2; Hamburg Ship Model Basin HSVA: Hamburg, Germany, 2020. [Google Scholar]
- Valanto, P. Active Flooding Mitigation for Stability Enhancement in a Damaged RoPax Ship. J. Mar. Sci. Eng. 2022, 10, 797. [Google Scholar] [CrossRef]
- Kujanpää, J. Sample Ship No. 6, Deliverable D2.1.6; FLARE: Turku, Finland, 2019.
- Jacobsen, K.; Hong, Y.; Valanto, P. Model Test Results for Benchmarking Purposes—Gradual Flooding Tests with the MT RoPax. EU-project FLARE Deliverable D4.2–Vol. 7; Hamburg Ship Model Basin HSVA: Hamburg, Germany, 2021. [Google Scholar]
- Jacobsen, K.; Hong, Y.; Valanto, P. Model Test Results for Mitigation Measures with the MT RoPax. EU-Project FLARE Deliverable D4.6; Hamburg Ship Model Basin HSVA: Hamburg, Germany, 2022. [Google Scholar]
- Valanto, P.; Schumacher, A. On the Roll Damping of Intact and Damaged Ships. In Proceedings of the 1st International Conference on the Stability and Safety of Ships and Ocean Vehicles, Glasgow, UK, 7–11 June 2021. [Google Scholar]










| MT RoPax—HSVA Model No: 5460/5539 | Symbol | Unit | Ship |
|---|---|---|---|
| Length overall | LOA | m | 162.00 |
| Length between perpendiculars | LPP | m | 146.72 |
| Breadth at the waterline | BWL | m | 28.00 |
| Draught at the aft perpendicular | TA | m | 6.10/6.30 |
| Draught at the forward perpendicular | TF | m | 6.10/6.30 |
| Depth to trailer deck | D | m | 9.20 |
| Displaced volume (bare hull) | ∇BH | m3 | 16,799.4 |
| Block coefficient | CB | - | 0.6522 |
| Intact transverse GM | GM | m | 1.425–3.40 |
| FLARE MT RoPax Benchmark Damage Case | |||||
|---|---|---|---|---|---|
| GM | HS | BE | DOE | SWEDOE | EXP |
| 1.425 m | 3.5 m | 28.3% | 53.1% | 63.1% | 100% |
| 3.250 m | 7.5 m | 36.7% | 96.3% | 96.6% | 100% |
| FLARE MT RoPax Benchmark Damage Case | |||||
|---|---|---|---|---|---|
| GM | HS | BE | DOE | SWEDOE | EXP |
| 1.425 m | 3.5 m | 0/20 | 3/20 | 4/20 | 7/20 |
| 3.250 m | 7.5 m | 0/20 | 17/20 | 18/20 | 5/20 |
| FLARE MT RoPax MSRC Damage Case 2 for Flooding Mitigation | |||||
|---|---|---|---|---|---|
| GM | HS | BE | DOE | SWEDOE | EXP |
| 3.40 m | 3.5 m | 38.0% | 77.7% | 93.2% | 100% |
| 3.40 m | 5.0 m | 54.4% | 87.4% | 82.5% | 100% |
| FLARE MT RoPax MSRC Damage Case 2 for Flooding Mitigation | |||||
|---|---|---|---|---|---|
| GM | HS | BE | DOE | SWEDOE | EXP |
| 3.40 m | 3.5 m | 0/20 | 2/20 | 3/20 | 4/20 |
| 3.40 m | 5.0 m | 0/20 | 0/20 | 0/20 | 0/20 |
| Boundary Condition for the Damage Opening on Ship Side | Type | ||
|---|---|---|---|
| Effect Modeled | BE | DOE | SWEDOE |
| Pressure or water height difference | ✓ | ✓ | ✓ |
| Flow speed in the opening | ✓ | ✓ | |
| Horizontal drift + sway velocity of the ship | ✓ | ✓ | |
| Horizontal acceleration of the damage opening | ✓ | ✓ | |
| Floodwater inertia in the opening | ✓ | ✓ | |
| Shallow water speed on deck in front of the opening | ✓ | ||
| Simple formulation with no memory effect | ✓ | ||
| Time-integration of the flow speed in the opening | ✓ | ✓ | |
| Water viscosity on deck or in the damage opening | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valanto, P. On Boundary Conditions for Damage Openings in RoPax-Ship Survivability Computations. J. Mar. Sci. Eng. 2023, 11, 643. https://doi.org/10.3390/jmse11030643
Valanto P. On Boundary Conditions for Damage Openings in RoPax-Ship Survivability Computations. Journal of Marine Science and Engineering. 2023; 11(3):643. https://doi.org/10.3390/jmse11030643
Chicago/Turabian StyleValanto, Petri. 2023. "On Boundary Conditions for Damage Openings in RoPax-Ship Survivability Computations" Journal of Marine Science and Engineering 11, no. 3: 643. https://doi.org/10.3390/jmse11030643
APA StyleValanto, P. (2023). On Boundary Conditions for Damage Openings in RoPax-Ship Survivability Computations. Journal of Marine Science and Engineering, 11(3), 643. https://doi.org/10.3390/jmse11030643