
Dynamic Response Characteristics of the Hydraulic Rotary System of an Azimuth Thruster for a Dynamic Positioning Vessel

Abstract
:1. Introduction
2. Composition and Working Principle of FS-3510 Azimuth Vector Thruster
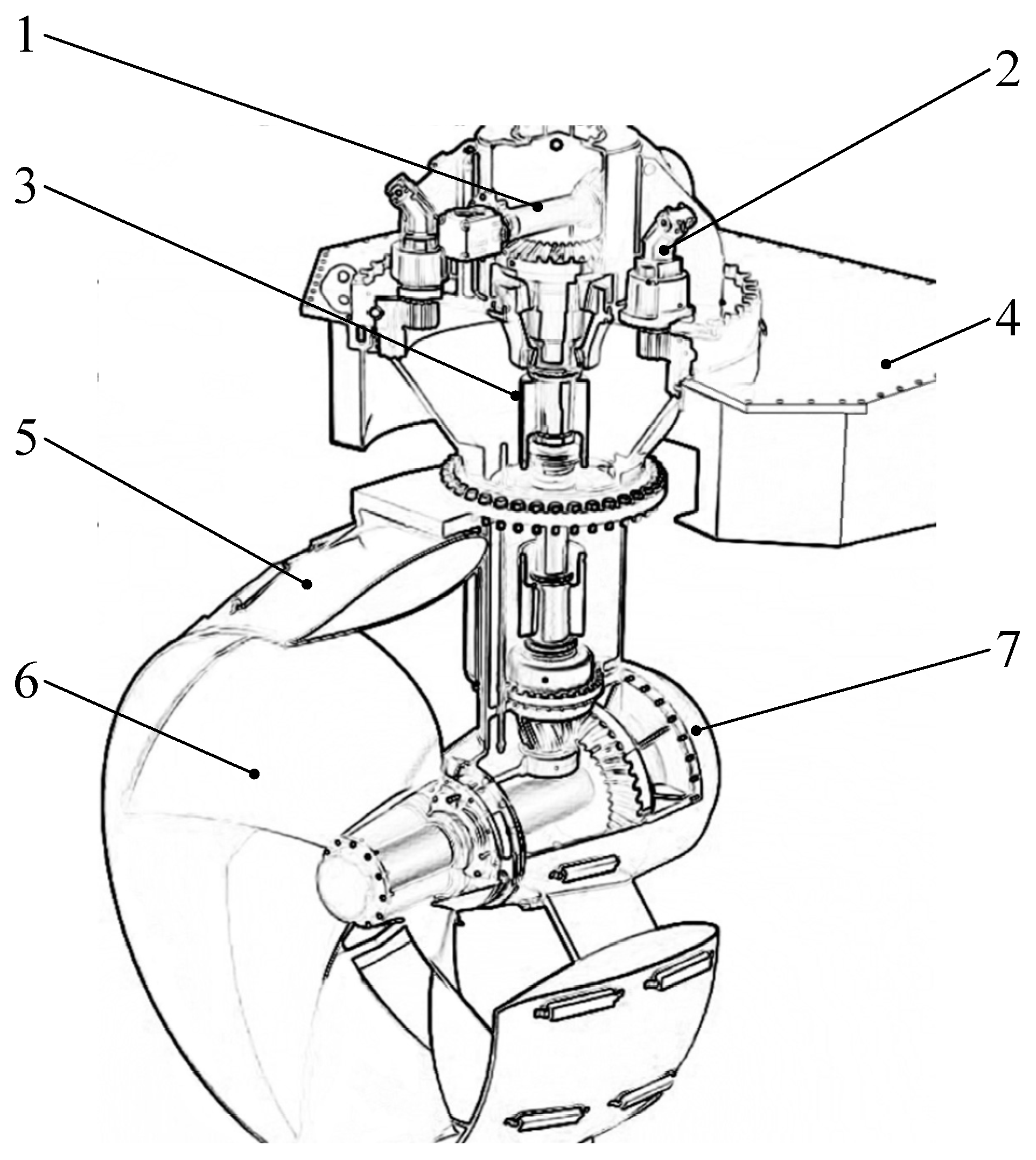
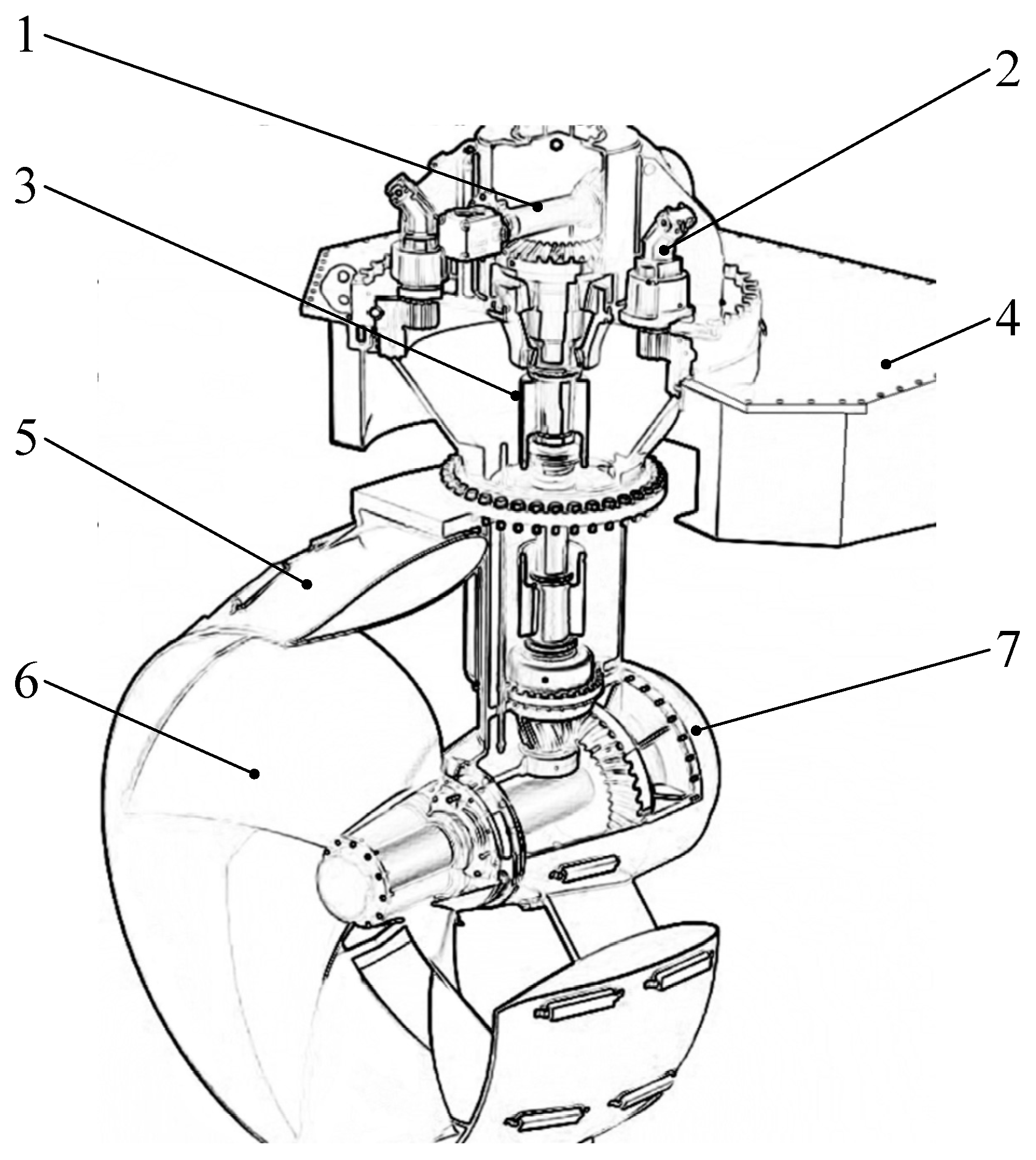
2.1. Composition of the Azimuth Vector Thruster
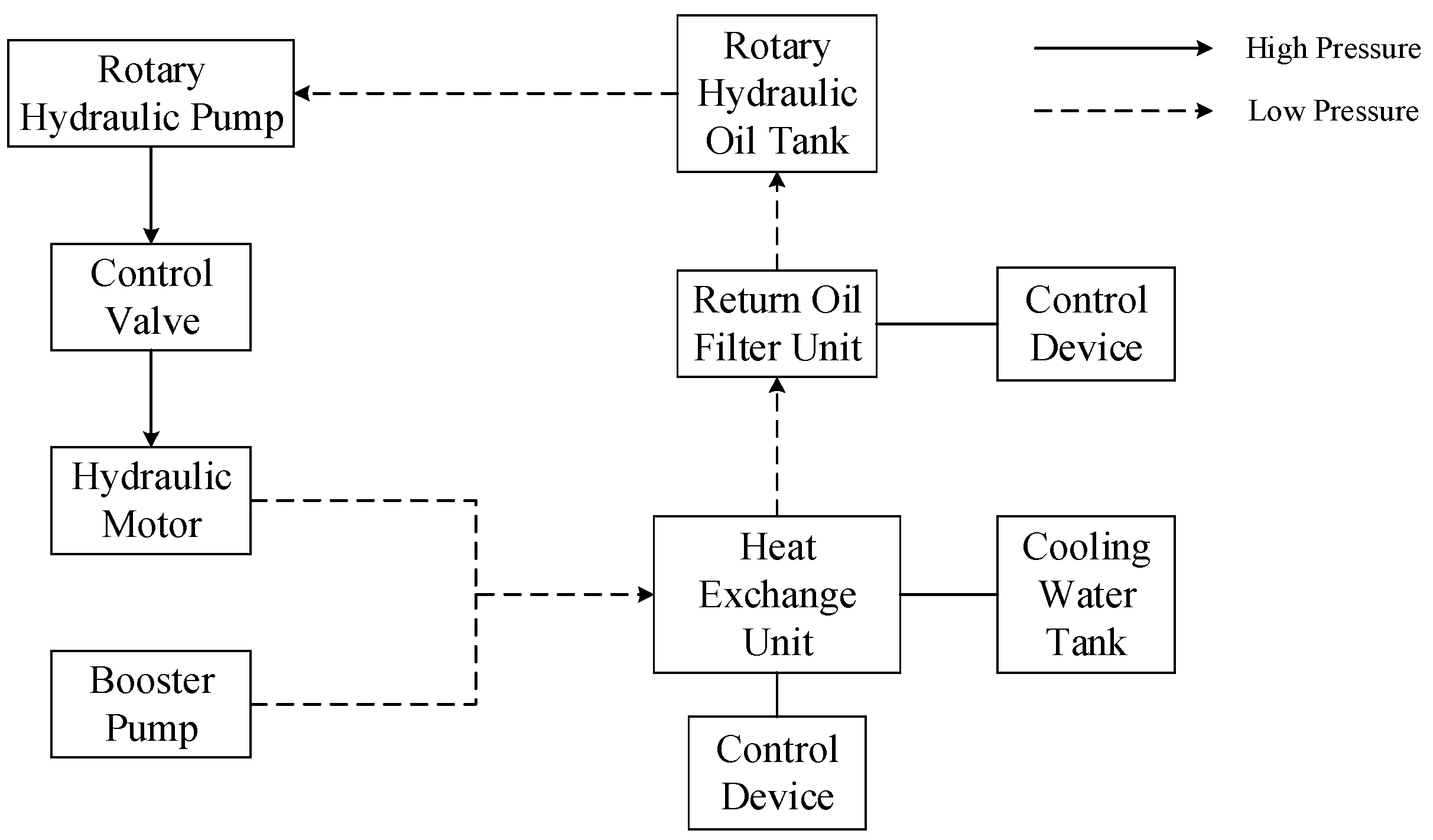
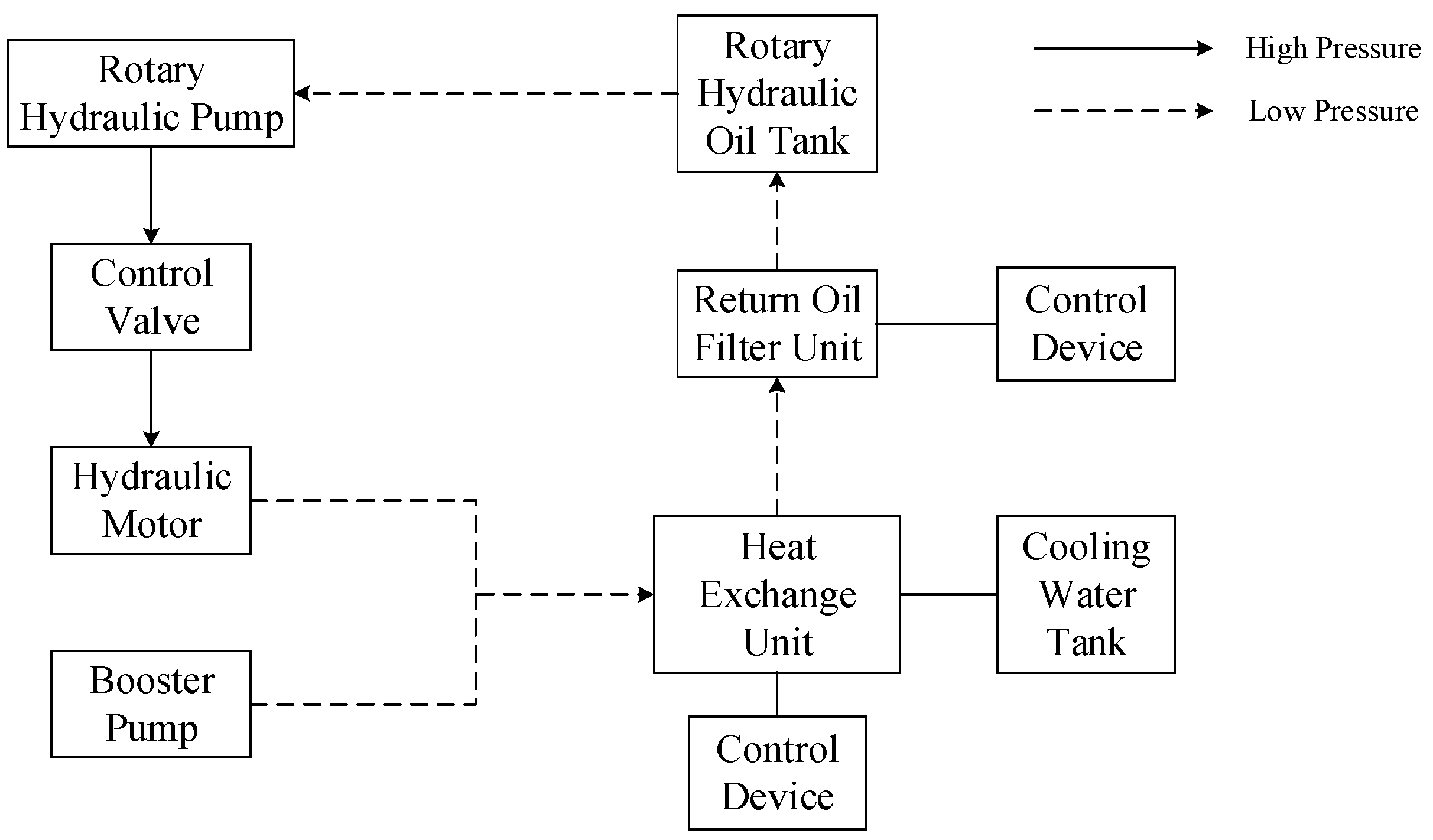
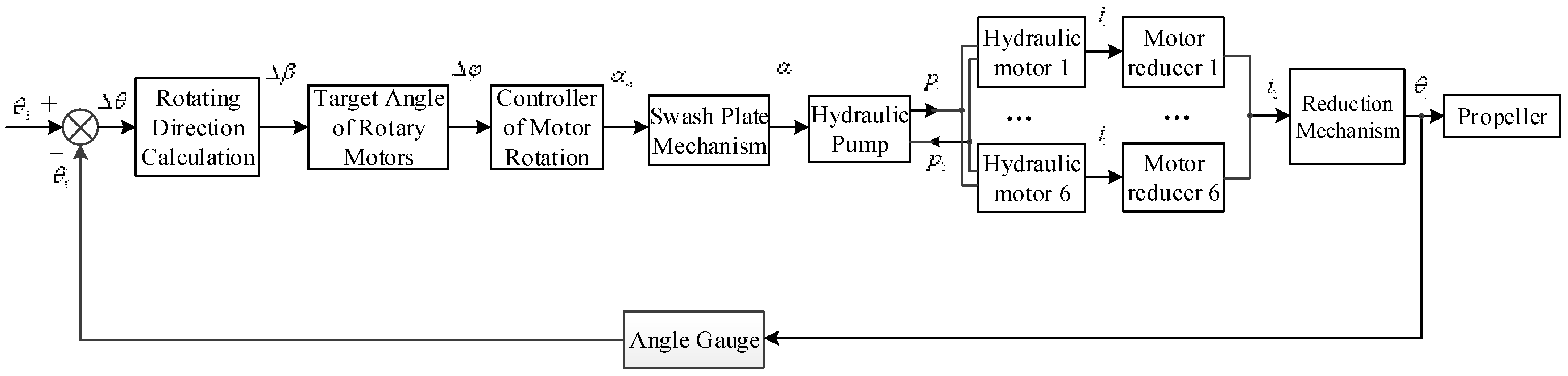
2.2. Composition and Working Principle of the Rotary System
3. Mathematical Model of the Propeller Rotary Dynamic System
3.1. Mathematical Modeling of the Pump-Controlled Hydraulic Motor
- The friction loss, pipeline dynamics and fluid quality effects are ignored for all connecting pipes;
- It is assumed that the internal and external discharges of the hydraulic motor are laminar flows;
- It is assumed that the two oil return pipelines are exactly the same and that the total volumes of the two chambers comprising a pump, motor and pipeline are the same. The pressure, temperature and bulk elastic modulus of the hydraulic oil in the chamber are constant, and the temperature and density of the oil are constant;
- It is assumed that the oil supply system responds in real time, the oil supply pressure is constant, and the pressure on the low-pressure side is equal to the oil supply pressure;
- The effect of structural flexibility is ignored;
- It is assumed that the phenomenon of pressure saturation does not occur.
3.2. Mathematical Modeling of the Hydraulic Motor Drive Deceleration Mechanism and Load
4. Controller Design and Azimuth Angle Optimization Control Strategy of the Rotary Dynamic System
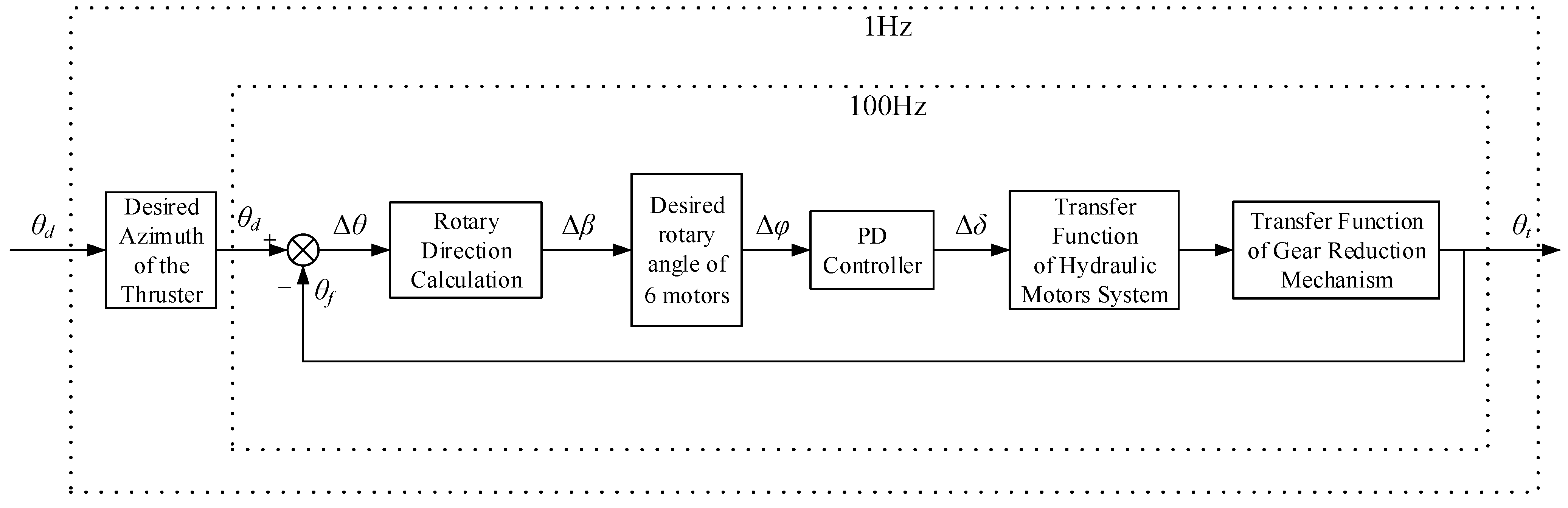
4.1. Azimuth Angle Optimization Control Strategy of the Azimuth Thruster
4.2. Design of the Azimuth Angle Controller for the Azimuth Thruster
4.3. Design of a Rotation Simulation System for the Azimuth Vector Thruster Considering a Dynamic Positioning System
5. Analysis of the Hydraulic Rotary Dynamic Simulation Model
5.1. Hydraulic Rotary Dynamic Simulation System
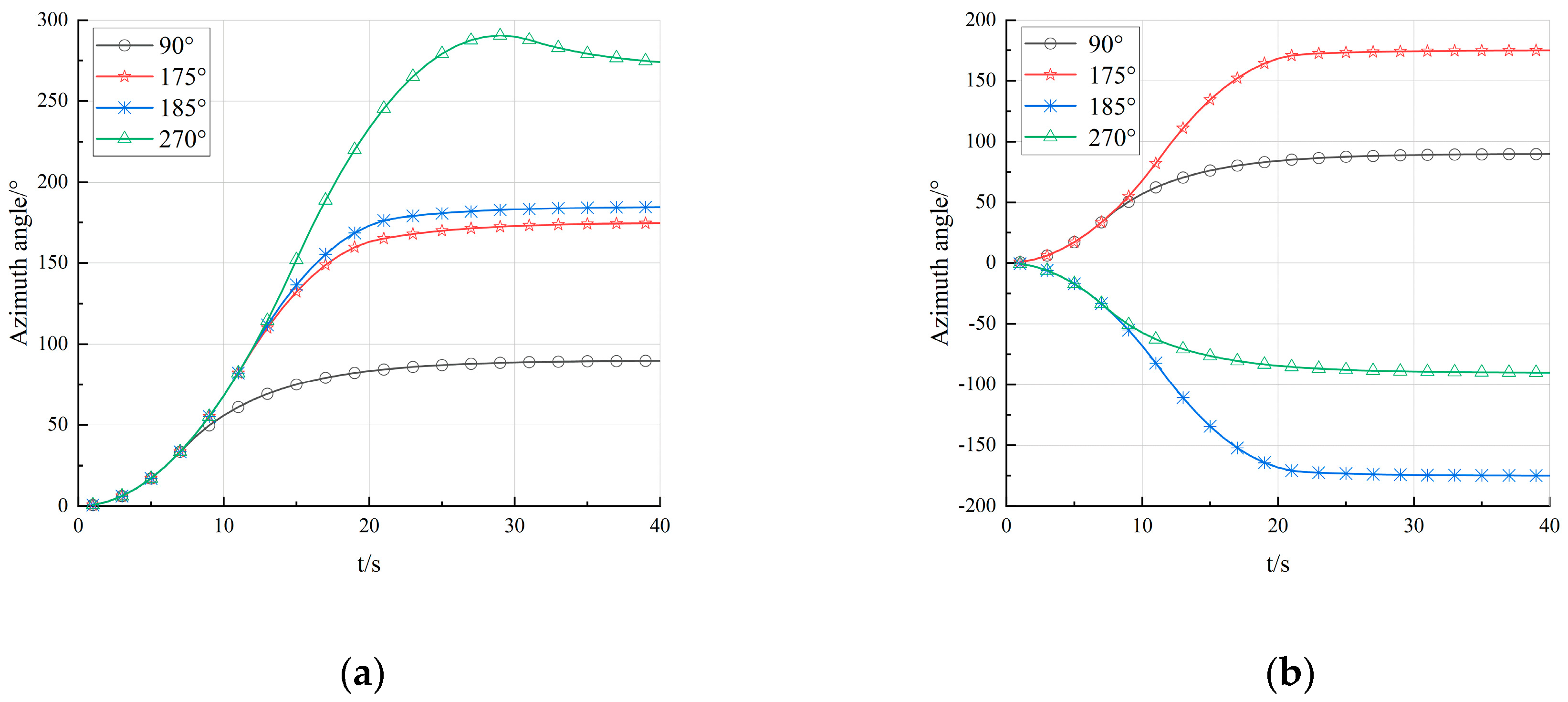
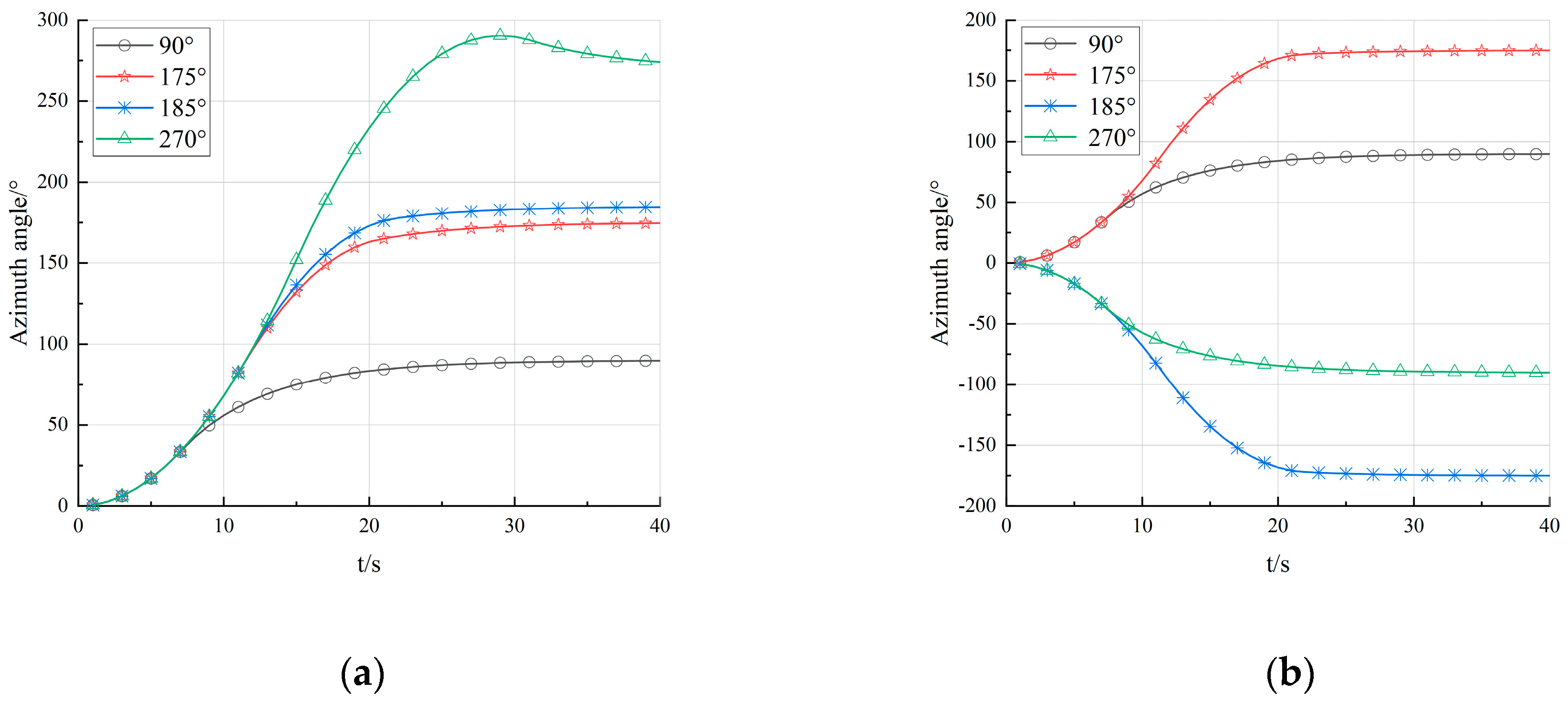
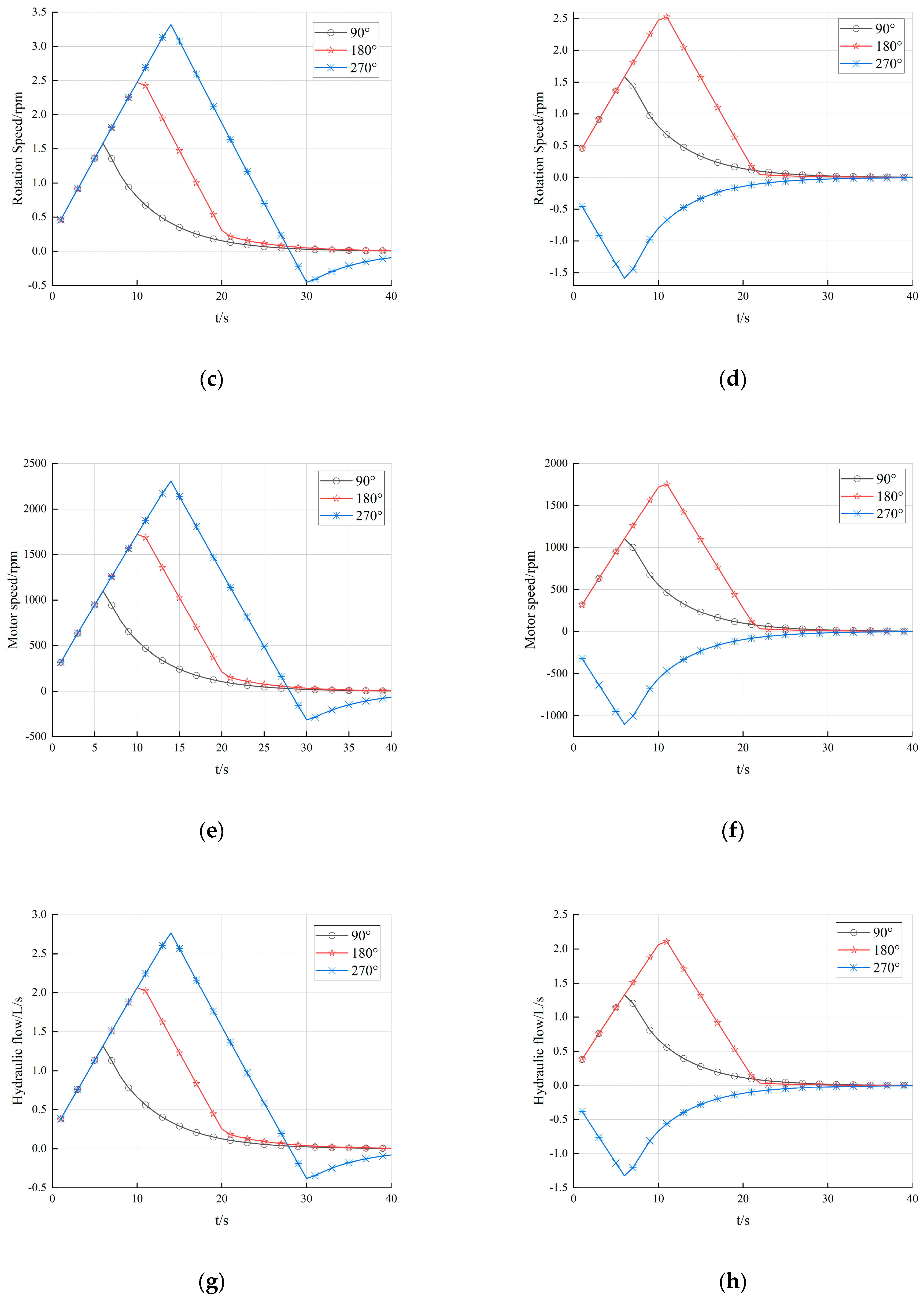
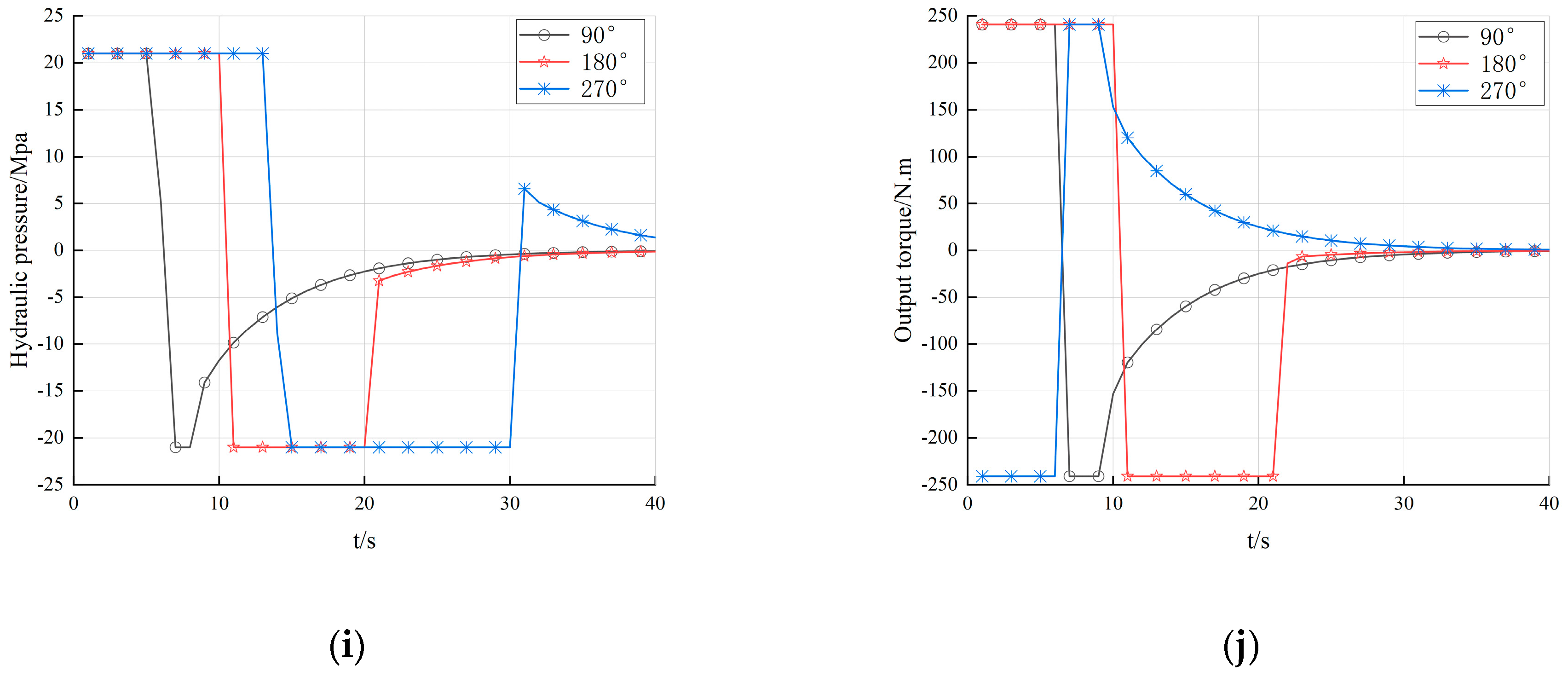
5.2. Simulation of Optimal Control Strategies with and without the Azimuth Rotation Direction
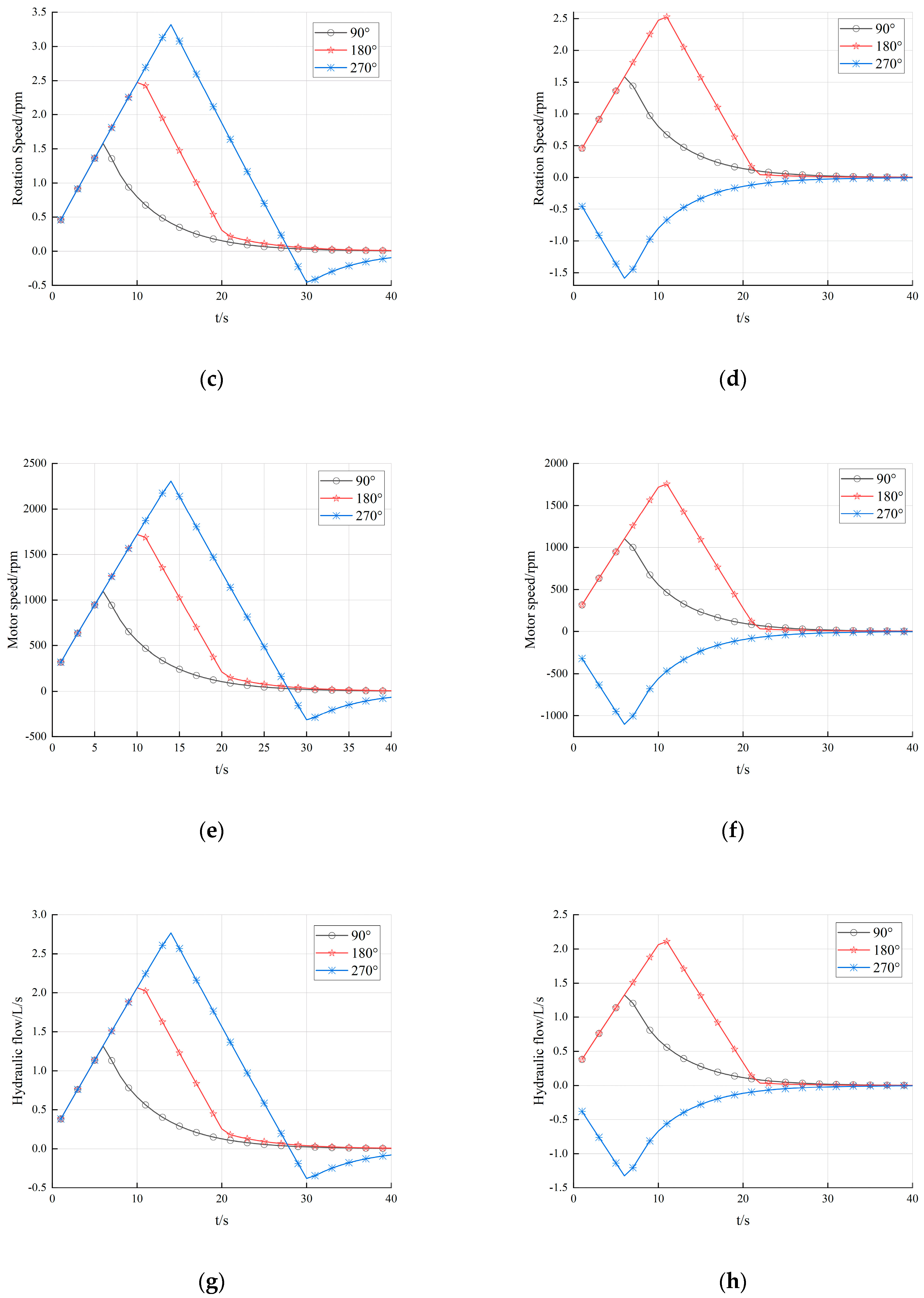
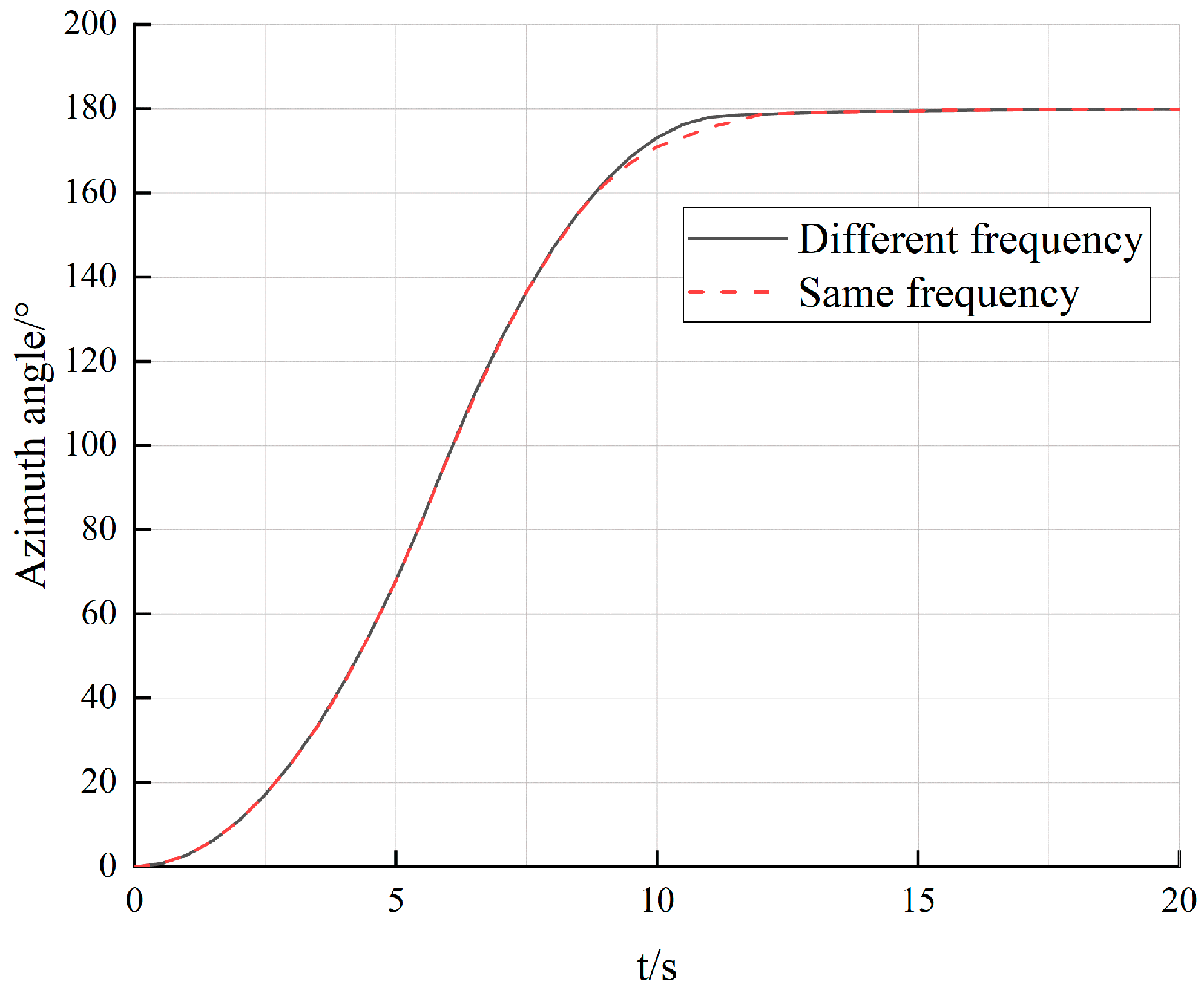
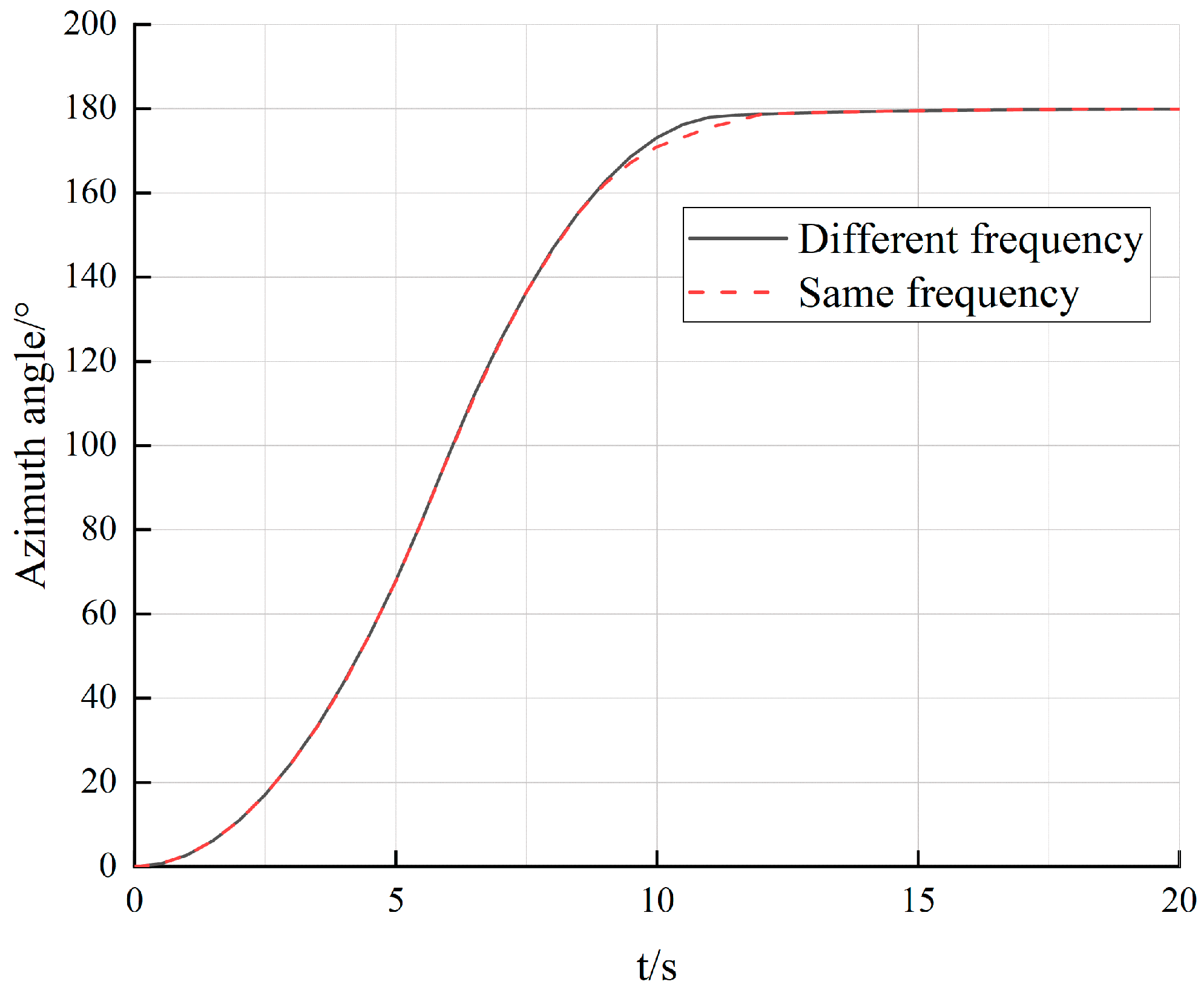
5.3. Simulation of the Inner- and Outer-Loops of the System with Different Control Frequencies
6. Conclusions
- A hydraulic rotary dynamic system model and method of simulating the azimuth vector thruster were proposed to reflect the dynamic response of the hydraulic rotary dynamic system of the azimuth thruster.
- An optimal strategy for controlling the direction of rotation of the azimuth vector thruster was proposed. The azimuth output via the thrust allocation module of the dynamic positioning system was introduced into the simulation model as the target azimuth. By judging the deviation between the target azimuth and the real azimuth, the rotation angle and direction of the azimuth thruster were obtained. The range of the rotation angle was reduced from [−2π, 2π] to [−π, π]. Combined with PID control, the swashplate angle controller of the hydraulic pump was designed to simplify the control of the rotation angle and the direction of the azimuth thruster. The control efficiency of the rotary dynamic system of the azimuth thruster was thus improved.
- A simulation method of an asynchronous control frequency for the joint simulation of the dynamic positioning system and hydraulic rotary system was proposed. There are two frequency control systems in the process of dynamic positioning ship control, and the control frequency of the hydraulic system of a real ship is 100 times that of the dynamic positioning system. The simulation process in this paper sets the dynamic positioning system (outer-loop) to execute every second, and the hydraulic control system (inner-loop) is executed every 0.01 s. This simulation method having a variable step size can simulate two different control frequencies in the dynamic positioning system.
- The constraint conditions of the thruster rotation rate of the propulsion distribution strategy of the dynamic positioning system were proposed. The maximum rotation rate of the Wärtsilä FS-3510 azimuth vector thruster is less than 3 r/min. It was concluded from the simulation and analysis results for different target azimuth angles that the maximum rotation speed of the azimuth thruster rotation simulation system was 2.5–3.5 r/min. The difference between the two values is reasonable for a mathematical model of the rotary dynamic system, and it meets the requirements of the rotary physical constraint condition (n ≤ 3 r/min) of the thrust allocation method of the dynamic positioning system.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bian, X.; Fu, M.; Wang, Y. Ship Dynamic Positioning; Science Press: Beijing, China, 2011; pp. 7–9. [Google Scholar]
- Fossen, T. Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley: New York, NY, USA, 2011; pp. 398–411. [Google Scholar]
- Ye, B.; Xiong, J.; Wang, Q.; Luo, Y. Design and Implementation of Pseudo-Inverse Thrust Allocation Algorithm for Ship Dynamic Positioning. IEEE Access 2019, 8, 16830–16837. [Google Scholar] [CrossRef]
- Yu, Y.; Mei, B.; Xu, G.; Shao, K.; Wang, X. High-power offshore adjustable pitch full-turn propulsion system. Shipbuild. Sci. Technol. 2015, 4, 20–23. [Google Scholar]
- Kim, S.; Kim, M. Fuel-Optimal Thrust-Allocation Algorithm Using Penalty Optimization Programing for Dynamic-Positioning-Controlled Offshore Platforms. Energies 2018, 11, 2128. [Google Scholar] [CrossRef]
- Fu, M.; Sun, J.; Wang, D. Research on Thrust Allocation of Dynamic Positioning Ship with Cycloidal Propeller. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 620–624. [Google Scholar]
- Li, X.; Jiang, S.; Cui, H.; Wang, H. Dynamics analysis of hydraulic thruster with propeller load. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2017, 45, 23–28. [Google Scholar]
- Arditti, F.; Cozijn, H.; Daalen, E.; Tannuri, E. Robust thrust allocation algorithm considering hydrodynamic interactions and actuator physical limitations. J. Mar. Sci. Technol. 2019, 24, 1057–1070. [Google Scholar] [CrossRef]
- Gao, D.; Wang, X.; Wang, T.; Wang, Y.; Xu, X. Optimal Thrust Allocation Strategy of Electric Propulsion Ship Based on Improved Non-Dominated Sorting Genetic Algorithm II. IEEE Access 2019, 7, 135247–135255. [Google Scholar] [CrossRef]
- Qiu, E. Design of underwater rotary propeller dynamic response simulation software. Ship Sci. Technol. 2019, 41, 91–93. [Google Scholar]
- Koschorrek, P.; Palm, M.; Jeinsch, T. A dynamic allocation strategy for voith Schneider propeller. IFAC-Pap. 2017, 50, 1127–1132. [Google Scholar]
- Tang, Z.; He, H.; Wang, L.; Wang, X. An optimal thrust allocation algorithm with bivariate thrust efficiency function considering hydrodynamic interactions. J. Mar. Sci. Technol. 2022, 27, 52–66. [Google Scholar] [CrossRef]
- Xia, G.; Sun, P.; Xia, B. Research on Thrust Allocation Optimization with Main Propeller-rudder Based on Improved Genetic Algorithm. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 2019–2024. [Google Scholar]
- Ding, F.; Yu, Q.; Xu, Y.; Wang, Y. A Novel Thrust Allocation Method Based on Improved Genetic Algorithm. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 1869–1874. [Google Scholar]
- Chen, Y.; Xu, H.; Feng, H.; Yu, W.; Li, T. Adaptive Group Bias Thrust Allocation Algorithm Based on Energy Optimization. In Proceedings of the 29th International Ocean and Polar Engineering Conference, Honolulu, HI, USA, 16–21 June 2019; pp. 19–171. [Google Scholar]
- Hu, X.; Du, J. Robust nonlinear control design for dynamic positioning of marine vessels with thruster system dynamics. Nonlinear Dyn. 2018, 94, 365–376. [Google Scholar] [CrossRef]
- Tuo, Y.; Zhou, X.; Huang, W. Thrust allocation based on improved global artificial fish swarm algorithm for the dynamic positioning system of vessels. In Proceedings of the 2021 6th International Conference on Automation, Control and Robotics Engineering (CACRE), Dalian, China, 15–17 July 2021; pp. 560–566. [Google Scholar]
- Tang, Z.; Wang, L.; Yi, F.; He, H. An Optimized Thrust Allocation Algorithm for Dynamic Positioning System Based on RBF Neural Network. In Proceedings of the ASME 2020 39th International Conference on Ocean, Offshore and Arctic Engineering, Virtual, Online, 3–7 August 2020; Volume 6A. [Google Scholar]
- Haseltalab, A.; Garofano, V.; Pampus, M.; Negenborn, R. Model Predictive Trajectory Tracking Control and Thrust Allocation for Autonomous Vessels. IFAC-Pap. 2020, 53, 14532–14538. [Google Scholar] [CrossRef]
- Skulstad, R.; Li, G.; Zhang, H.; Fossen, T. A Neural Network Approach to Control Allocation of Ships for Dynamic Positioning. IFAC-Pap. 2018, 51, 128–133. [Google Scholar] [CrossRef]
- Zhao, B.; Xia, G. Recursive-Biased-Generalized-Inverse Method for Thrust Allocation for Dynamic Positioning Vessels with Non-Rotatable Thrusters and Force Constraints. IOP Conf. Ser. Mater. Sci. Eng. 2020, 853, 012033. [Google Scholar] [CrossRef]
- Vu, M.T.; Le, T.; Thanh, H.L.N.N.; Huynh, T.; Van, M.; Hoang, Q.; Do, T.D. Robust Position Control of an Over-Actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors 2021, 21, 747. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Yuan, L.; Zan, Y. Simulation Method of Hydraulic Slewing Dynamics Control System of Azimuth Vector Thruster. China Patent 07194106B, 2019. [Google Scholar]
- Liang, L. Hydraulic Transmission and Electro-Hydraulic Servo System; Harbin Engineering University Press: Harbin, China, 2005; pp. 170–198. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Numerical Value |
|---|---|---|
| DM | Displacement of hydraulic motor/m3 | 1.20 × 10−5 |
| J | Moment of inertia of propellers and rotary mechanisms/(kg·m2) | 1.00 × 104 |
| k | Total reduction ratio | 6.95 × 102 |
| Ct | Total leakage coefficient | 2.00 × 10−12 |
| V0 | Total volume/m3 | 0.38 × 10−3 |
| βe | Effective bulk modulus of oil/Pa | 7.00 × 108 |
| BM | Viscous damping coefficient/(N·m·s·rad−1) | 0.01 |
| Dp | Displacement of variable pump/(m3·rad−1) | 2.87 × 10−5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, R.; Jin, Z.; Li, X.; Yuan, L. Dynamic Response Characteristics of the Hydraulic Rotary System of an Azimuth Thruster for a Dynamic Positioning Vessel. J. Mar. Sci. Eng. 2023, 11, 399. https://doi.org/10.3390/jmse11020399
Liu R, Jin Z, Li X, Yuan L. Dynamic Response Characteristics of the Hydraulic Rotary System of an Azimuth Thruster for a Dynamic Positioning Vessel. Journal of Marine Science and Engineering. 2023; 11(2):399. https://doi.org/10.3390/jmse11020399
Chicago/Turabian StyleLiu, Ruiqi, Zhongyu Jin, Xinfei Li, and Lihao Yuan. 2023. "Dynamic Response Characteristics of the Hydraulic Rotary System of an Azimuth Thruster for a Dynamic Positioning Vessel" Journal of Marine Science and Engineering 11, no. 2: 399. https://doi.org/10.3390/jmse11020399
APA StyleLiu, R., Jin, Z., Li, X., & Yuan, L. (2023). Dynamic Response Characteristics of the Hydraulic Rotary System of an Azimuth Thruster for a Dynamic Positioning Vessel. Journal of Marine Science and Engineering, 11(2), 399. https://doi.org/10.3390/jmse11020399